國
國
國
國
立
立
立
立
交
交
交
交
通
通
通
通
大
大
大
大
學
學
學
學
電子工程學系
電子工程學系
電子工程學系
電子工程學系
電子研究所碩士班
電子研究所碩士班
電子研究所碩士班
電子研究所碩士班
碩
碩
碩
碩
士
士
士
士
論
論
論
論
文
文
文
文
IEEE
IEEE
IEEE
IEEE802.16e OFDMA
802.16e OFDMA
802.16e OFDMA 同步
802.16e OFDMA
同步
同步技術之設計
同步
技術之設計
技術之設計
技術之設計
Design of Synchronization Techniques for
IEEE802.16e OFDMA
研 究 生:李宜融
指導教授:陳紹基 博士
IEEE802.16e OFDMA
IEEE802.16e OFDMA
IEEE802.16e OFDMA
IEEE802.16e OFDMA 同步技術之設計
同步技術之設計
同步技術之設計
同步技術之設計
Design of Synchronization Techniques for IEEE802.16e OFDMA
研 究 生:李宜融 Student:Yi-Ron Lee
指導教授: 陳紹基 博士 Advisor:Sau-Gee Chen
國 立 交 通 大 學
電子工程學系 電子研究所碩士班
碩 士 論 文
A Thesis
Submitted to Department of Electronics Engineering & Institute of Electronics
College of Electrical and Computer Engineering
National Chiao-Tung University
in Partial Fulfillment of the Requirements
for the Degree of
Master of Science
In
Electronics Engineering
November 2007
Hsinchu, Taiwan, Republic of China
IEEE
IEEE
IEEE
IEEE802.16e OFDMA
802.16e OFDMA
802.16e OFDMA
802.16e OFDMA 同步
同步
同步
同步技術之設計
技術之設計
技術之設計
技術之設計
學生: 李宜融
指導教授: 陳紹基 博士
國立交通大學
電子工程學系 電子研究所碩士班
摘
摘
摘
摘
要
要
要
要
在本論文中設計一套全面的同步系統,其適用於 IEEE 802.16e
的規格。基於現有的載波頻率估測、符元時間偵測、整數部分載波頻
率估測與識別先導訊號方法,我們提出了一些改進方式。在載波頻率
估測方法上,解決了先導訊號週期性不完整造成的誤差。在符元時間
偵測上,提出的方法可以在未知先導訊號編號的情形下在時域上估
測。在整數部分載波頻率估測與識別先導訊號方法上,提出了低複雜
度的演算法。
Design of Synchronization Techniques for
IEEE802.16e
Student: Yi-Ron Lee
Advisor: Sau-Gee Chen
Department of Electronics Engineering & Institute of Electronics
National Chiao Tung University
Abstract
We propose an overall synchronization scheme suitable for IEEE 802.16e in this thesis. Based on existing methods, we proposed some improved methods including carrier frequency offset estimation, symbol time estimation, integer carrier frequency offset (ICFO) estimation and preamble identification. The proposed method of carrier frequency offset estimation can overcome an error due to imperfectly periodic property of the preamble. The proposed method of symbol time estimation can be designed on time domain without known preamble index. The proposed methods of ICFO estimation and preamble identification have low computation complexity.
誌
誌
誌
誌
謝
謝
謝
謝
本論文可以順利完成,首先要感謝我的指導教授 陳紹基博士。當我 遇到研究上的疑惑與困難時,能適時的給予指導以及提供思考方向,並且 不厭其煩的在學問上給予正確的觀念講解,在此致上由衷的感謝。 在碩士生涯的兩年多,我也要感謝實驗室的好朋友們:思衡、瑞徽、 致良和飛群叔叔,謝謝你們陪我一起患難與歡樂,帶給我許多寶貴的回憶; 感謝健全學長在計畫和生活上面的指導,不吝惜的分享他豐富的社會經 驗,使我獲益良多。 最後感謝我的父母與家人的支持,讓我能順利完成學業,並且擁有寶 貴的人生經歷,在此獻上無限的感激與敬意。
目錄
第一章 緒論
1
第二章 OFDM 與 OFDMA 簡介
4
2.1 OFDM 簡介
4
2.1.1 保護區間和循環字首觀念介紹
5
2.1.2 離散時間OFDM模型
6
2.2 OFDMA 簡介
8
2.3 OFDMA 同步的議題
9
2.3.1 載波頻率偏移的效應
9
2.3.2 符元時間偏移的效應
10
第三章 IEEE 802.16e OFDMA 規格介紹
12
3.1 IEEE 802.16e 簡介
12
3.2 IEEE 802.16e OFDMA 中的符元架構
13
3.2.1 OFDMA 基本術語
13
3.2.2 系統參數(System parameters)
15
3.2.3 可變式(Scalable) OFDMA
16
3.2.4 訊框架構 (Frame Structure)
16
3.3.1 下行
18
3.3.1.1 前導訊號的架構和調變
18
3.3.1.2 DL 子載波的配置
19
3.3.1.3 嚮導訊號的調變
22
3.3.1.4 資料的調變
22
3.3.2 上行
23
3.3.2.1 資料配置規則 (data mapping rules)
23
3.3.2.2 UL 子載波的配置
24
3.3.2.3 嚮導訊號之調變
25
3.3.2.4 資料的調變
26
第四章 IEEE 802.16e OFDMA 的同步設計
27
4.1 Preamble 架構
27
4.2 同步的流程
29
4.3 訊框偵測
30
4.4 載波頻率偏移估測
31
4.4.1 現有方法
31
4.4.2 提出的方法
33
4.5 符元時間估測
34
4.5.1 現有方法
34
4.5.2 提出的方法
37
4.6 整數部分載波頻率偏移估測與識別 preamble
39
4.6.1 現有方法
40
4.6.1.1 KSYP method
40
4.6.1.2 ML method
42
4.6.1.3 Ting’s method
43
4.6.2 提出的方法
44
4.6.2.1 Proposed method
44
4.6.2.2 Proposed auxiliary technique
45
4.6.2.2.1 Improved KSYP method
46
4.6.2.2.2 Improved ML method
46
4.6.2.2.3 Improved Ting’s method
47
4.6.2.2.4 Improved proposed method
47
4.6.3 複雜度分析
48
第五章 模擬結果與分析
52
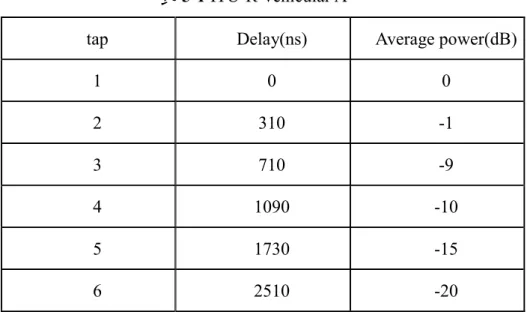
5.1 通道模型
52
5.2 載波頻率偏移估測之效能分析
54
5.3 符元時間估測之效能分析
56
5.4 整數部分載波頻率偏移估測與識別 preamble 之效能分析
第六章
結論 67表目錄
表目錄
表目錄
表目錄
表 3-1 Wimax 系統規格整理 13 表 3-2 可變式 OFDMA 16 表 3-3 OFDMA 下行之 PUSC 模式下的子載波放置 21 表 3-4 OFDMA 下行之子通道群的編制方式 21 表 3-5 OFDMA 上行之子載波放置範例 25 表 4-1 在 m 固定時對一組 preamble 的計算量比較 49 表 4-2 整體計算量比較 50 表 4-3 儲存運算結果的整體計算量比較 50 表 4-4 儲存運算結果的整體計算量比較(DFT 點數為 512) 51 表 4-5 儲存運算結果的整體計算量比較,考慮鄰近Nv子載波通道 51 表 5-1 ITU-R 運動測試環境通道 A 53 表 5-2 ITU-R 運動測試環境通道 B 53 表 5-3 OFDM 系統模擬參數 54圖目錄
圖目錄
圖目錄
圖目錄
圖 2-1 FDM 與 OFDM 的頻寬效應比較 5 圖 2-2 OFDM 符元中的 CP 6 圖 2-3 離散時間 OFDM 模型 6 圖 2-4 OFDM 與 OFDMA 的主要差異 9 圖 2-5 符元邊界選取示意圖 11 圖 3-1 OFDMA 子通道配置圖 14 圖 3-2 data region 範例 14 圖 3-3 多種排列模式的 OFDMA 訊框 15 圖 3-4 TDD 模式下的訊框架構 17 圖 3-5 下行的 cluster 的組態 19 圖 3-6 OFMA 系統用來調變嚮導訊號的 PRBS 產生器 22 圖 3-7 QPSK、16QAM 和 64QAM 星座圖 23 圖 3-8 OFDMA 上行之資料配置規則範例 24 圖 3-9 OFDMA 上行之 tile 示意圖 25 圖 4-1 preamble 配置圖 28 圖 4-2 同步流程圖 29 圖 4-3 傳統方法在 K=N/2 36 圖 4-4 傳統方法在 K=N/8 36 圖 4-5 提出的方法在 K=N/8 37 圖 4-6 提出的方法在未處理 cp 過長時,K=N/8 , cp 長度為 N/4 38 圖 4-7 提出的方法在處理 cp 過長時,K=N/4 , cp 長度為 N/4 39 圖 5-1 載波頻率估測的 MSE 55 圖 5-2 載波頻率估測的 MSE,0.05
ndf
=
55圖 5-3 符元時間估測的錯誤率,cp 長度為 1/16 符元時間 56 圖 5-4 符元時間估測的錯誤率,cp 長度為 1/4 符元時間 57 圖 5-5 符元時間估測的錯誤率,cp 長度為 1/16 符元時間,
0.05
ndf
=
57 圖 5-6 符元時間估測的錯誤率,cp 長度為 1/4 符元時間,0.05
ndf
=
58 圖 5-7 在只利用鄰近通道下的估測整數部分載波頻率偏移與 preamble 的方法 比較 59 圖 5-8 在利用鄰近多個子載波間距通道下的提出方法參考實數部分與各個方 法的比較 60 圖 5-9 在利用鄰近多個子載波間距通道下的提出方法參考實數和虛數部分與 各個方法的比較 61 圖 5-10 在利用鄰近多個子載波間距通道下的 Ting’s method 與各個方法的比較 61 圖 5-11 在利用鄰近多個子載波間距通道下的 KSYP method 與各個方法的比較 62 圖 5-12 在利用鄰近多個子載波間距通道下的 ML method 與各個方法的比較 62 圖 5-13 在只利用鄰近通道下的估測整數部分載波頻率偏移與 preamble 的方法 比較 63 圖 5-14 在利用鄰近多個子載波間距通道下的提出方法參考實數與各個方法的 比較 64 圖 5-15 在利用鄰近多個子載波間距通道下的提出方法參考實數和虛數部分與 各個方法的比較 65 圖 5-16 在利用鄰近多個子載波間距通道下的 Ting’s method 與各個方法的比較 65圖 5-17 在利用鄰近多個子載波間距通道下的 KSYP method 與各個方法的比較
66
圖 5-18 在利用鄰近多個子載波間距通道下的 ML method 與各個方法的比較
第
第
第
第一
一
一
一章
章
章
章
緒論
緒論
緒論
緒論
由於多媒體應用及網路使用的盛行,使得人們對頻寬的需求日益增加,因此 高資料傳輸率成為下一代通訊系統的基本要求。眾多的研究想找出一個容易實 現、有效率的頻寬使用及經過不理想的通道而效能更穩定的新調變技術,正交分 頻多工(Orthogonal Frequency Division Multiplexing, OFDM)是一個可以滿足 以上需求的調變技術。正交分頻多工技術在1960 年代中期即已提出[1],但在當 時由於正交多載波硬體的製作相當困難且昂貴,而且在數位信號處理不發達的當 時 , 此 技 術 並 不 受 到 歡 迎 。 直 到 1971 , Weinstein 及 Ebert 在 [2] 提 出 利 用 IFFT(Inverse Fast Fourier Transform)及FFT(Fast Fourier Transform)取代 類比之多載波製作,此技術得以再受重視。在1980 年Peled 及Ruiz 提出利用前 置循環信號(Circular Prefix)來解決在多 重路徑通道下的符 際 干擾(Inter Symbol Interference, ISI)問題。
在目前OFDM 技術已經被採用為多種傳輸技術的標準,在有線的環境下,如 非對稱式數位用路迴路(ADSL)、高速數位用路迴路(HDSL)及電力線傳輸系統 (Home-Plug)。在無線環境中,如數位音訊廣播(DAB)、數位影像廣播(DVB)、IEEE 802.11a 無線區域網路標準(WLAN)及IEEE 802.16 無線都會型區域網路(WMAN)
OFDM 技術廣泛的被使用在通信系統中,因為OFDM 在頻率選擇性衰退通道 (Frequency Selective Fading Channel)、多重路徑(Multipath)的影響及遭到 窄頻干擾時有較佳的穩定性。對單載波通系統,衰退通道及干擾可能造成傳輸失 敗,但對多載波系統而言,只有少部分的子載波受到影響,且經由錯誤更正編碼 可增加傳輸效能。但是,OFDM 有兩個熟知的缺點,第一個是峰值對均值功率比 (Peak-to-Average Power Ratio,PAPR),由於OFDM 信號為多個載波組合而成, 因此其信號功率會隨著子載波所載之符元不同而變化,若變化之範圍超出功率放 大器之線性區域則產生非線性失真,因此在多載波時必須考慮PAPR 問題,以減 少功率放大器之非線性失真,PAPR 的問題增加D/A 及A/D 設計的複雜度,以及 減低功率放大器的效率。第二個是對同步錯誤極為敏感,同步錯誤包括頻率偏移 (Frequency Offset)及時間偏移(Time Shift),頻率偏移主要原因為傳送與接收 端的振盪器存在頻率差與都卜勒效應,將造成載波間的正交性被破壞,使得子載 波間互相干擾(Inter-carrier Interference, ICI),造成子載波能量下降,而 且相鄰的子載波也會造成干擾。時間偏移是由於雜訊及多重路徑使得不能正確的 找出每個符元(Symbol)的邊界,會造成在DFT運算窗口選取的不正確,造成ICI 與 IBI(Inter-block Interference, IBI)的效應。在IEEE 802.16e識別preamble編 號也是一個重要的同步議題,由於擁有114組preamble序列,是經由基地台的選 擇來決定哪一組preamble序列,而在接收端並不清楚收到哪一組preamble序列, 必須要識別preamble編號才能得知所使用的preamble序列。
本論文是針對IEEE 802.16e 無線都會型區域網路作研究,主要目的是針對 接收機的實體層同步中: 訊框偵測(Frame Detection)、符元時間估測(Symbol Time Estimation) 、 載 波 頻 率 偏 移 估 測 (Carrier Frequency Offset Estimation)、整數部分載波頻率偏移估測(Integer Carrier Frequency Offset Estimation)、識別preamble (Preamble Identification)的研究。
下列概述各章節的內容 :
第一章 : 研究背景與動機並概述本論文 第二章 : 介紹 OFDM 與 OFDMA 的基本觀念 第三章 : 對 IEEE 802.16e OFDMA 系統介紹 第四章 : 介紹現有與提出的同步技巧
第五章 : 將本論文所提出的方法及效能分析作一個總結 第六章 : 結論以及未來的發展方向
第二章
第二章
第二章
第二章
OFDM
OFDM
OFDM
OFDM 與
與
與
與 OFDMA
OFDMA
OFDMA 介紹
OFDMA
介紹
介紹
介紹
在本章裡,會簡介 OFDM 與 OFDMA 的基本理論,OFDMA 是架構於 OFDM 並利用 多重存取的技術,其在眾多地方皆等同於 OFDM,其詳細的、相關資料可參照 [3] 和 [4]。
2.1
2.1
2.1
2.1 OFDM
OFDM
OFDM 簡介
OFDM
簡介
簡介
簡介
OFDM (Orthogonal Frequency Division Multiplexing)系統的基本原理, 是將原有的資料傳輸序列分配在多個不同的子載波上平行傳送。OFDM 系統與傳 統分頻多工(Frequency Division Multiplexing,FDM)不同之處在於OFDM 系統 的每個子載波(Sub-Carrier)之間具有正交性(Orthogonality),子載波彼此之間 不會產生干擾,因此頻譜可以互相重疊,此為OFDM 系統之主要特點;而傳統分 頻多工系統之不同載波之間頻譜沒有重疊,因此OFDM 系統比傳統分頻多工系統 具有較好的頻寬效應(Bandwidth Efficiency),如圖2-1。
圖2-1 FDM與OFDM的頻寬效應比較 [5]
OFDM因將資料傳輸序列分配在多個不同的子載波上平行傳送。所以,在頻域 上,相對於單一載波而言,各個子載波的頻寬相對變小數倍,儘管整個通道之頻 率響應是非平坦的,具有頻率選擇性 (frequency selective fading) ,但是對 於個別的子載波而言,其通道響應為平坦衰落(flat fading)。在時域上,每一 個子載波上的傳輸間隔變大為原本間隔的數倍,使得在每個子載波上的符元持續 時 間 (Symbol duration) 增 加 , 符 元 時 間 變 長 可 以 降 低 由 多 路 徑 延 遲 擴 散 (Multi-path Delay Spread)引起之符元干擾(Inter Symbol Interference,ISI)。
2.1.1
2.1.1
2.1.1
2.1.1
保護區間和循環字首觀念介紹
保護區間和循環字首觀念介紹
保護區間和循環字首觀念介紹
保護區間和循環字首觀念介紹
為了能有效消除多路徑通道延遲所造成的ISI影響,直觀的想法就是在符元 和符元之間空出一段時間不傳任何資料,作為保護區間 (Guard Interval , GI),而且此區間的長度必須大於最大通道路徑延遲 (Maximum Channel Path Delay)。但是對於OFDM調變而言,因為其訊號是用正交載波來調變的,在通道的 多路徑效應下,接收端收到的符元卻會因為保護區間而在這個符元中失去訊號的 正交性,產生子載波間干擾 (Intercarrier Interference ,ICI)。為了保持正 交性,保護區間為符元本身的循環延伸所構成,亦即將符元後端的一部分複製,當CP長度大於最大通道路徑延遲時,將沒有ISI和ICI。 雖然加入CP能有效解決多路徑通道延遲的問題,但相對也使系統需要額外付 出傳輸頻寬和傳輸功率的代價。當CP長度太小時,則時序和多路徑通道延遲的問 題便會嚴重影響整體系統效能;反之,CP長度太大時,將造成系統的頻寬和傳輸 功率不必要的浪費。因此,CP長度的大小需依系統的需求而定。
2.1.
2.1.
2.1.
2.1.2
2
2 離散時間
2
離散時間
離散時間OFDM
離散時間
OFDM
OFDM模型
OFDM
模型
模型
模型
1971 年,Weinstein 提出可以將 OFDM 系統的傳送端的調變器 (Modulator) 和接收端的解調器 (Demodulator) 分別使用 IDFT 和 DFT 來實現 [10]。並且隨 著 fast DFT (FFT) 和 fast IDFT (IFFT) 演算法的發展,使其可以應用在 OFDM 系統上,如圖 2-3 所示。
⋮
⋮
⋮
⋮
( )
w n
( , )
h n l
(0)
iX
(1)
iX
(
1)
iX N
−
(0)
ix
(1)
ix
(
1)
ix N
−
(0)
iy
(1)
iy
(
1)
iy N
−
(0)
iY
(1)
iY
(
1)
iY N
−
P/S
S/P
I
D
F
T
D
F
T
AWGN
i c px
y
icp 圖 2-3 離散時間 OFDM 模型 [6] Cyclic prefix 圖 2-2 OFDM 符元中的 CP [6]首先,將頻域的訊號使用 IDFT 調變到時域,其中i表示目前符元為第 i 個 符元,為了方便起見,以下討論將省略 i 參數。則時域的訊號可表為 2 1 0 ( ) ( ) j kn N N k x n X k e π − = =
∑
(2-1) 其中X k( )表示被第 k 個子載波 (Subcarrier) 調變的訊號,且0≤ ≤n N−1。之後經過並列變串列變換器(parallel to serial converter,P/S) 並且加上 CP cp
x 之後,便經由時變多重路徑通道 (Time-variant and Multipath Fading
Channel) 傳送至接收端,此時接收到的訊號可表為 1 0 ( ) ( , ) ( ) ( ) L N l y n h n l x n l w n − = =
∑
− + (2-2) 其中h n l( , )代表通道路徑l在取樣時間 n 的響應。( )i N表示一個以 N 為基數的循環 位移 (Cyclic Shift) 運算子,這是由於加了之後 CP 所產生的效果;w n( ) 為 一個被取樣過後的複數可加性高斯白雜訊 (AWGN)。 接收到的訊號y n( )在將 CP ycp移除之後,便可經由串列變並列變換器(Serial to Parallel Converter,S/P) 然後經過 DFT 解調,解調後在第 k 個 子載波的訊號如下所示 2 1 0 ( ) ( ) j kn N N n Y k y n e π − − = =
∑
(2-3) 以上即為 OFDM 離散模型之基本架構,值得注意的是,當(2-2)的通道為非時 變時,可以將接收訊號簡化成 1 0 ( ) ( ) ( ) ( ) L N l y n h l x n l w n − = =∑
− + (2-4) 此時由於 CP 的作用使得接收訊號成為通道和傳送訊號的環狀折積 (Circular Convolution) 再加上雜訊,表示如下 ( ) ( ) ( ) y n =h n ⊙x n (2-5) 其中⊙在此定義為環狀折積之運算子,由離散訊號處理的觀念得知[7],兩個訊為 2 1 0 ( ) ( ) ( ) ( ) ( ) j kn N N n Y k y n e H k X k W k π − − = =
∑
= + (2-6) 其中 2 2 1 1 0 0 ( ) ( ) ( ) j kn j kn N L N N n n H k h n e h n e π π − − − − = = =∑
=∑
(2-7) 為通道的頻率響應 2 1 0 ( ) ( ) j kn N N n W k w n e π − − = =∑
(2-8) 為雜訊的頻率響應。明顯地,可以從(2-6)看出當通道為非時變時,靠著 CP 和 IDFT/DFT 運算使得在頻域的接收訊號僅為傳送訊號和通道響應相乘,此為 OFDM 系統可以對抗多重路徑通道的原因。2.2 OFDMA
2.2 OFDMA
2.2 OFDMA
2.2 OFDMA 簡介
簡介
簡介
簡介
OFDMA(Orthogonal Frequency Division Multiple Access)是架構於 OFDM 並利用多重存取的技術,是未來無限通通訊技術的重要組成部分,其可變頻寬的 機制其功能為根據通道狀況改變系統頻寬與子載波數,使用者可以選擇對自己通 信品質好的子通道上發送信號,具有較高的頻譜利用率,在抵抗多徑效應、頻率 選擇性衰落或窄頻干擾上都有很好的優勢,圖 2-4 將可以看出 OFDM 與 OFDMA 的 主要差別。
圖 2-4 OFDM 與 OFDMA 的主要差異 [8] 然而為了支援多用戶,OFDMA 在實做上會變的複雜,尤其是在控制電路上將 會造成額外的負擔,例如在上傳時需控制各使用者的傳輸能量,避免過大影響其 餘使用者。
2.
2.
2.
2.3 OFDMA
3 OFDMA
3 OFDMA
3 OFDMA 同步的議題
同步的議題
同步的議題
同步的議題
在 OFDMA 系 統 中 , 其 主 要 缺 點 為 對 載 波 頻 率 偏 移 (Carrier Frequency Offset,CFO)及符元時間偏移(Symbol time offset)的敏感度高,而嚴重影響效 能。因此,在這將討論頻率與時間偏移對 OFDMA 系統所造成的影響。
2.
2.
2.
在 OFDMA 系統中對載波頻率偏移極為敏感,但是卻不可避免的會產生頻率偏 移,其主要原因為基地台與用戶端之間的震盪器在現階段技術當中並不可能達成 完全一樣頻率的震盪器,因而必須對其差異做補償。在討論頻率偏移前,首先定
義標準化的頻率偏移量(normalized carrier frequency offset) f∆如下:
t r f f f ε = − ∆ (2-9) 其 中 ft 與 fr 分 別 為 基 地 台 與 用 戶 端 的 載 波 頻 率 ,∆f 為 系 統 的 子 載 波 間 距 (subcarrier spacing)。ε非整數部分會造成接收端作 DFT 頻譜取樣至非正交頻 率點而導致 ICI 和訊號的衰減,整數部分會造成接收資料在頻域上偏移整數個位 置。資料在 AWGN 的情況下,頻率偏移量為ε ,第 m 個子載波接收訊號如式 (2-10)[12]所示:
( )
1 1( )
2 ( ) 0 0 1 0, 1 ( ) ( ) (0) ( ) ( ) ( )desired signal + ICI ( )
n l k N N j N n l N l l k Y k X l e W k N X k I X l I l k W k W k π − +ε − − = = − = ≠ = + = + − + = +
∑∑
∑
(2-10) ,其中 2 ( ) 1 0 ( 1)( ) ( ) sin( ( )) sin( ( )) j n l k N N n j N l k N I l k e l k e N l k N π ε π ε π ε π ε − + − = − − + − = − + = − +∑
(2-11) 由式(2-10)所示,可以明顯看出ε造成資料的振幅衰減、相位偏移和 ICI。而此 種影響不能簡單的被傳統的等化器(equalizer)所補償,因此顯現出頻率偏移估測 的重要性。2.
2.
2.
2.3
33
3.2
.2
.2
.2 符元時間偏移的效應
符元時間偏移的效應
符元時間偏移的效應
符元時間偏移的效應
符元時間偏移是由於雜訊及多重路徑使得不能正確的找出每個符元的邊
界,會造成在 DFT 運算窗口選取的不正確,因而造成 ISI 破壞子載波之間的正交 性。圖 2.4 案例 1(case 1)表示 DFT 運算窗口除了涵蓋到第 n 個目標符元的樣本 點外,還涵蓋到第 n+1 符元中部分循環字首,因此符元的部分資訊會流失且造成 不可回復的 ISI。在案例 2 中,DFT 運算窗口涵蓋了第 n 個符元以及其循環字首, 此符元時間的選取錯誤會在時域上的循環移動與頻域上的相位旋轉,其子載波的 正交性仍能保持而無 ISI。在案例 3 中,為 DFT 窗口精確的選取到所需的範圍並 能完整的保留子載波的正交性並且不會在頻域上產生相位偏移[9],然而在多重 路徑延遲的情況下,系統不亦正確決定出此符元時間[10][11]。 Symbol n Symbol n+1 Symbol n-1 Symbol n GI Symbol n+1 GI Case 3 Case 2 Case 1 圖2.5 符元邊界選取示意圖
第三章
第三章
第三章
第三章
IEEE 80
IEEE 80
IEEE 80
IEEE 802.16e
2.16e
2.16e OFDMA
2.16e
OFDMA
OFDMA 規格介紹
OFDMA
規格介紹
規格介紹
規格介紹
本章介紹 IEEE 802.16e OFDMA 標準。由於整個 802.16e 系統極為複雜,因 此只會介紹到本篇論文有使用到的部分。其餘的部分,請參照 [3] 和 [4]。
3.1 IEEE
3.1 IEEE
3.1 IEEE
3.1 IEEE 802.16e
802.16e
802.16e
802.16e 簡介
簡介
簡介
簡介
WiMAX(World Interoperability for Micro-wave Access )是根據 802.16 標準[3],[4]所衍伸的的一種無線都會網路技術。WiMAX 可分為固定式及移動式 2 種,固定式即 802.16d,或稱 802.16-2004,能取代 ADSL 的最後一哩(Last Mile) 線路,也有人稱為 Wireless ADSL;移動式就是 802.16e,也稱 802.16-2005。 802.16e 專注在行動運用上,以非直視路徑 (Non Line of Sight;NLOS) 特性 為基礎,制定出相容 802.16d 的行動傳輸規格。可以自由選擇 TDD 或 FDD 等雙工 方式,並採用 OFDM、OFDMA 方式傳輸,且支援 128、512、1024、2048 個子載波
調變方式。其操作頻率視不同地區與應用分佈於 2GHz~6GHz 之間,其最高傳輸速
表 3-1 Wimax 系統規格整理
Fixed access Mobile access Standard IEEE 802.16-2004 IEEE 802.16e Frequency range 2~11 GHz 2~6 GHz
Multiple access OFDM/OFDMA Scalable OFDMA Modulation BPSK, QPSK, 16QAM, 64QAM BPSK, QPSK, 16QAM, 64QAM Duplexing TDD/FDD TDD Channel spacing 1.25~20M Hz 1.25, 5, 10, 20 MHz Symbol rate 15 Mbps 75 Mbps
3.2 IEEE
3.2 IEEE
3.2 IEEE
3.2 IEEE 802.16e OFDMA
802.16e OFDMA
802.16e OFDMA
802.16e OFDMA 中的符元架構
中的符元架構
中的符元架構
中的符元架構
3.
3.
3.
3.2
22
2.1 OFDMA
.1 OFDMA
.1 OFDMA
.1 OFDMA 基本術語
基本術語
基本術語
基本術語 (OFDMA Basic Terms)
(OFDMA Basic Terms)
(OFDMA Basic Terms)
(OFDMA Basic Terms)
本節介紹 OFDMA PHY 中的一些基本定義,幫助我們了解 802.16e OFDMA 中 子載波的分配和傳送配置的情況。
Subchannel:在 OFDMA 中,子載波被分成數個子集合(subset),這些子集合 稱為子通道(subcannel)。其中在子通道中的子載波並不一定是連續的,如 圖 3.1 所示。
圖 3-1 OFDMA 子通道配置圖 [3]
Slot:為一個二維的單位,由時間和子通道 (subchannel) 所組成,並且定 義 為 資 料 (data) 可 以 被 配 置 的 最 小 單 位 。 在 下 行 (downlink) PUSC (partial usage of subchannels)的排列方式下,一個 slot 為一個子通道 加上兩個 OFDMA 符元時間;在上行 (uplink)的情況,一個 slot 為一個子 通道加上三個 OFDMA 符元時間。
Burst (Data Region):為一個由連續的子通道和連續的 OFDMA 符元所組成 的二維放置單位,如圖 3-2 所示。
圖 3-2 data region 範例 [3]
Segment:為天線蜂巢架構中所分出的扇形涵蓋區域,在 802.16e 中定義三 個 segment,分別為 segment 0、segment 1 和 segment 2。由頻域上定義 可使用的子通道群組 (subchannel group),做為切割方式。
Permutation Zone:為連續並使用同樣的排列模式(Permutation mode)的 OFDMA 符元的單位。在下行與上傳的子訊框中可以包含不同的排列模式。圖
3-3 中描述使用多種排列模式的 OFDMA 訊框。
圖 3-3 多種排列模式的 OFDMA 訊框 [4]
3.2.2
3.2.2
3.2.2
3.2.2 系統參數
系統參數
系統參數(System parameters)
系統參數
(System parameters)
(System parameters)
(System parameters)
OFDMA 系統參數定義如下,前四者為主要參數(Primitive Parameters)的定 義,其餘為推導參數(Derived Parameters):
BW :通道頻寬,隨不同的 FFT 點數而變。
used
N :有被使用的子載波數目 (包含 DC subcarrier)。
n :取樣參數 (sampling factor),大小與頻寬(BW)和Nused相關,其決定
子載波間距(subcarrier sapcing)詳細情況可參考 [9]。
G:為循環字首和符元長度之比值,可支援1/ 32,1/16,1/ 8和1/ 4的大小。
FFT
N :使用的 FFT 點數,為 2 的冪次並且大於Nused之最小值。
Sampling frequency:Fs = floor n BW( ⋅ / 8000) 8000×
Subcarrier spacing:∆ =f Fs/NFFT
Useful symbol time:Tb = ∆1/ f
OFDMA symbol time:Ts =Tb+Tg
Sampling time:Tb/NFFT
3.2.3
3.2.3
3.2.3
3.2.3 可變式
可變式
可變式
可變式(Scalable) OFDMA
(Scalable) OFDMA
(Scalable) OFDMA
(Scalable) OFDMA
在 IEEE802.16e OFDMA 中可以選擇 FFT 的大小,可以使用 128、512、1024、 2048 點 FFT,所以稱為可變式 OFDMA(S-OFDMA)。在不同的環境中,通道狀況亦 有所不同,可變式 OFDMA 可依照通道環境改變系統頻寬與子載波數,例如:在都 會區,使用者較多的區域,使用較高的頻寬,仍能提供較高的傳輸速率。下表為 在不同的頻寬時相對的 FFT size。 表 3-2 可變式 OFDMA Parameters Values
System Channel Bandwidth (MHz) 1.25 5 10 20 Sampling Frequency (MHz) 1.4 5.6 11.2 22.4
FFT size 128 512 1024 2048 Number of SubChannel 2 8 16 32
Subcarrier Frequency Spacing 10.94 kHz Useful Symbol Time 91.4 microseconds
3.2.4
3.2.4
3.2.4
3.2.4 訊框架構
訊框架構
訊框架構 (Frame Structure)
訊框架構
(Frame Structure)
(Frame Structure)
(Frame Structure)
在IEEE 802.16中有兩種雙工模式(Duplexing Modes),TDD(time division duplex) 或 FDD(frequency division duplex)。根據Wimax forum[4],TDD是唯
一的雙工模式,因此在本篇論文中將只討論TDD模式。
在TDD中,UL和DL在相同的頻率但不同的時間點上傳送。圖3-4為OFDMA TDD 的 訊 框 架 構 。 frame 的 前 半 段 時 間 為 DL 傳 收 的 區 間 , 之 後 的 TTG (Transmit/Receive Transition Gap)為讓基地台 (BS) 從傳送模式轉到接收模 式的時間,然後再來是UL傳收的區間,之後的RTG (Receive/Transmit Transition Gap)為讓基地台 (BS) 從接收模式轉到傳送模式的時間。以下將說明圖中的控制 訊號用途。
Preamble:是第一個傳送的符元,其主要目的是為了同步使用。將在第四章 有詳細的介紹。
FCH (Frame Control Header): FCH 緊接在 Preamble 之後,為QPSK調變, 其提供了訊框結構的資訊,包括有 MAP 的長度、編碼和所使用的子通道。 DL-MAP 和 UL-MAP:提供了子通道的配置方式與控制訊號。
3.3
3.3
3.3
3.3 子載波的配置
子載波的配置
子載波的配置(
子載波的配置
((
(subcarrier allocations
subcarrier allocations
subcarrier allocations
subcarrier allocations)
))
)
OFDMA PHY 有四種 FFT 大小:2048、1024、512、128。為了方便,將只討論 1024 點的 OFDMA 子載波的配置。子載波可大概分為三類,並說明如下:
Data subcarriers:用來傳送資料。
Pilot subcarrier:傳送已知的訊號,可利用來做一些估測。
Null subcarriers:不傳送任何訊號,分為頻域上的保護區間 (guard bands) 和直流子載波 (DC subcarrier)。
3.3
3.3
3.3
3.3.1
.1
.1
.1
下行
下行
下行
下行
下行為基地台傳送到手機端接收的行為,本節將對802.16e OFDMA PUSC downlink傳送規格做一個簡介。
3.
3.
3.
3.3
33
3.
..
.1.1
1.1
1.1
1.1
前 導 訊 號 的 架 構 和 調 變
前 導 訊 號 的 架 構 和 調 變
前 導 訊 號 的 架 構 和 調 變 (preamble
前 導 訊 號 的 架 構 和 調 變
(preamble
(preamble
(preamble
structure and modul
structure and modul
structure and modul
structure and modula
aa
ation)
tion)
tion)
tion)
如圖 3-4 所示,DL 訊框的第一個符元為前導訊號 (preamble),主要用來做 同步 (synchronization) 和 基地台搜尋 (cell search)。其擺放的形式依照不 同的 segment 分成三種形式,定義如下:
PreambleCarrierSetn = + in 3 k (3-1) 其中,
86,87,88
n= :分別代表 segment 0、segment 1 和 segment 2。
0, , 283
從(3-1)可發現,preamble 擺放方式以 segment 為區隔相互在頻域上交錯放置,
所以圖 3-4 的 preamble 部分僅有1
3為該 segment 的 preamble,其他
2
3為另外兩
個 segment 所有,這是 preamble 與其他資料不同之處。至於 preamble 的內容則 為一組特定的 pseudo-noise(PN) code,以 BPSK 調變並且增強(boost) 2 2 倍, 如(3-2)所示: 1 {Pr } 4 2 ( ) 2 k eamblePilotModulated w ℜ = i i − {PreamblePilotModulated} 0 ℑ = (3-2) 其中wk為 PN code。另外要注意的是,DC subcarrier 必須為0,所以剛好落在 DC subcarrier 上的 preamble 值都必須設定為0。
3.
3.
3.
3.3
33
3.
..
.1.2 DL
1.2 DL
1.2 DL子載波的配置
1.2 DL
子載波的配置
子載波的配置
子載波的配置
OFDMA downlink PUSC 裡面子載波的配置除了放 zero subcarriers 和 guard band 之外,資料 (包含 pilot subcarriers 和 data subcarriers) 以 cluster 為單位擺放,如圖 3-5 所示。
圖 3-5 下行的 cluster 的組態 [4]
一個 cluster 中有 14 個子載波,內有 2 個嚮導訊號 (pilot subcarriers) 和 12 個 data subcarriers,其擺放方式根據現有的符元是偶數符元 (even symbol)
或者奇數符元 (odd symbol) 而定,接在 preamble 之後的第一個符文定義為偶 數符元,其後為奇數符元,依此類推。
802.16e 共支援 128、512、1024 和 2048 點的 FFT 點數,在 DL PUSC 的模式 中,不管是哪種點數都是以 cluster 為單位擺放,使得硬體的設計上會較有一致 性。而在 DL FUSC 模式,雖然在相同 FFT 點數下支援較多的 data subcarriers, 但是 pilot subcarriers 也相對減少許多,再加上不同點數的情形下擺放資料的 方式也不盡相同,使得通道估測在硬體設計上較無一致性,少量的 pilot subcarriers 也使得通道估測的準確度受到挑戰,使得 FUSC 模式主要在良好的 傳輸環境下使用。表 3-3 為 1024 點 DL PUSC 的資料放置情形,裡面共有 120 個 clusters,60 個 subchannels (1 個 subchannel=2 個 clusters)。
至於其中不同 segment 之間的分割方式可參考表 3-4,首先將 PUSC 內的子 通道分成子通道群(subchannel group),之後分給不同的 segment 來使用。其中 segment 0 內至少要有 subchannel group 0,segment 1 內至少要有 subchannel group 2,segment 2 內至少要有 subchannel group 4。
表 3-3 OFDMA 下行之 PUSC 模式下的子載波放置[4]
3.
3.
3.
3.3
33
3.
..
.1.3
1.3
1.3
1.3
嚮導訊號的調變
嚮導訊號的調變
嚮導訊號的調變 (pilot modulation)
嚮導訊號的調變
(pilot modulation)
(pilot modulation)
(pilot modulation)
類似於 preamble 的調變方式,嚮導訊號以一個虛擬隨機二位元序列產生器 (pseudo-random binary sequence generator:PRBS generator)來產生,如圖
3-6 所示。內容為 BPSK 並且有 2.5dB(4 3倍)的增強,表示如下: 8 1 { } ( ) 3 2 k k c w ℜ = − { }ck 0 ℑ = (3-3) 圖 3-6 OFMA 系統用來調變嚮導訊號的 PRBS 產生器 [4]
3.
3.
3.
3.3
33
3.
..
.1.4
1.4
1.4
1.4
資料的調變
資料的調變
資料的調變 (data modulation)
資料的調變
(data modulation)
(data modulation)
(data modulation)
如圖 3-7,資料的調變方式有 QPSK、16QAMQ 和 64QAM,皆為格雷編碼方式 (Gary-mapped),其中 64QAM 為選擇性的(optional)。
圖 3-7 QPSK、16QAM 和 64QAM 星座圖 [4]
3.
3.
3.
3.3.2
3.2
3.2
3.2
上行
上行
上行
上行
上行為手機端傳送到基地台接收的行為,本節將對 802.16e OFDMA PUSC uplink 傳送規格做一個簡介。
3.
3.
3.
3.3.2
3.2
3.2
3.2.1
.1
.1
.1 資料配置規則
資料配置規則
資料配置規則 (data mapping rules)
資料配置規則
(data mapping rules)
(data mapping rules)
(data mapping rules)
Uplink 資料配置和 downlink 類似,都是以 slot 為最小單位開始擺放,到 達 data region 的邊界為止。主要不同之處有二,第一個是 slot 的維度變成了 1 個 subchannel 乘以 3 個 symbols;其次為整個 data region 的結構不必像 DL 一樣必須為長方形的結構,如圖 3-8 所示。
圖 3-8 OFDMA 上行之資料配置規則範例 [4]
3.
3.
3.
3.3.2
3.2
3.2
3.2.2
.2
.2
.2 UL
UL
UL 子載波的配置
UL
子載波的配置
子載波的配置
子載波的配置
在 UL 中以 tile 來當做配置的單位,如圖 3-9 所示。Tile 由連續 4 個子載 波和連續 3 個 OFDMA 符元時間所組成,其中含有 4 個 pilot subcarriers 和 8 個 data subcarriers。詳細的配置以 1024 點為範例,如表 3-5 所示。在 UL 中 1 個 burst 為 3 個符元時間和 1 個子通道 (subchannel)構成,而 6 個 tile 在頻域 上組成一個子通道,因此每個 burst 有 48 個 data subcarriers 和 24 個固定點 的 pilot subcarriers。
嚴格來說,即便是同一個 segment 中的用戶和基地台之間經歷的通道也會不 同,所以在 UL 中的 brusts 應該視為個體分別估測出其經歷的通道響應,不可全 部視為同一種通道下的響應來處理。對於 DL 而言,因為用戶端所接收的訊號都
來自於同一個通道影響,故沒有上述的問題存在,但是為了硬體設計上的一致性 (同時支援多種 FFT 點數),本論文在 DL 的通道估測設計將以一個 cluster 為單 位。另外,在 UL 的通道估測設計將以一個 burst (slot)為單位。 圖 3-9 OFDMA 上行之 tile 示意圖[4] 表 3-5 OFDMA 上行之子載波放置範例 [4]
3.
3.
3.
3.3.2
3.2
3.2
3.2.3
.3
.3
.3 嚮導訊號之調變
嚮導訊號之調變
嚮導訊號之調變 (pilot modulation)
嚮導訊號之調變
(pilot modulation)
(pilot modulation)
(pilot modulation)
始序列 (initialization sequences) 不同;其次是 pilot 的大小沒有增強 (boost)的效果,如(3-4)所示: 1 { } 2( ) 2 k k c w ℜ = − { }ck 0 ℑ = (3-4)
3.
3.
3.
3.3.2
3.2
3.2
3.2.4
.4
.4
.4 資料的調變
資料的調變
資料的調變 (data modulation)
資料的調變
(data modulation)
(data modulation)
(data modulation)
如圖 3-7 所示,資料的調變方式有 QPSK、16QAMQ 和 64QAM,皆為格雷編碼 方式(Gary-mapped),其中 64QAM 為選擇性的(optional)。
第
第
第
第四
四
四
四章
章
章
章
IEEE 802.16e OFDMA
IEEE 802.16e OFDMA
IEEE 802.16e OFDMA
IEEE 802.16e OFDMA 的同步設計
的同步設計
的同步設計
的同步設計
在本章中,首先將詳細的介紹 OFDMA 下行的 preamble,其次將介紹在已 知CP長度下現有的同步技巧並且提出吾人的同步設計。為了方便性,在這裡FFT 大小定為512,相關的系統設定請參照第三章。
4.1 Preamble 架構
架構
架構
架構
DL 訊 框 的 第 一個 符 元 為 前 導 訊 號 (preamble) , 主 要 用 來 做 初 始 同 步 (initial synchronization) 和基地台搜尋 (cell search)。其擺放的形式依照 不同的 segment 分成三種形式,定義如下:PreambleCarrierSetn = + in 3 k (4-1) 其中,
42, 43, 44
n= :分別代表 segment 0、segment 1 和 segment 2。
0, ,142
k= … :代表每一個 segment 各有 143 個交錯的子載波。
完整的描述,每一個 segment 有 38 組 preamble 序列,總共有 114 組 preamble 序 列。基地台根據 segment 和 ID cell 來決定使用哪一組 preamble 序列。從(4-1) 式可發現,preamble 擺放方式以 segment 為區隔相互在頻域上交錯放置,所以
preamble 部分僅有1
3為該 segment 的 preamble,其他
2
3為另外兩個 segment 所
有。圖 4-1 為 preamble 的子載波排列方式。圖中保護頻段(Guard band)是根據 FFT 大小而定,可以明顯看出 512 點時,左邊有 42 點子載波為保護頻段,右邊 有 41 點子載波為保護頻段。 圖4-1 preamble 配置圖 由於 preamble 子載波的配置,可以將 preamble 視為是一個經過 3 倍降頻 (down-sample)的訊號,這將導致在時域上有 3 個週期,然而由於 FFT 大小是 2 的幂次,是不能被 3 整除,意味著在時域上所獲得的取樣點並不是完整的 3 個週 期。又因為 preamble 為 BPSK 調變,在時域上將會有對中心點共軛對稱的特性。 * [ ], 0,1, ..., / 2 [ ] [ ], / 2 1, / 2 2, ..., x n n N x n x N n n N N N = = − = + + (4-2) 其中x n[ ]為時域上的 preamble。 綜合上述,Preamble 在時域上有 3 個週期與對中心點共軛的特性,這兩項 特性將會被利用在之後的同步上。
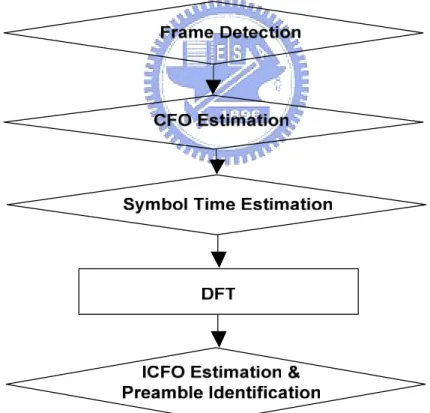
4.2 同步的流程
同步的流程
同步的流程
同步的流程
同步在 OFDMA 系統扮演著相當重要的角色,主要的工作有訊框偵測(Frame Detection)、符元時間估測(Symbol Time Estimation)、載波頻率偏移估測 (Carrier Frequency Offset Estimation)、整數部分載波頻率偏移估測(Integer
Carrier Frequency Offset Estimation) 、 識 別 preamble (Preamble
Identification)。圖 4.3 為提出的同步架構圖,一開始將先做訊框時間點的估 測,得知粗略的符元時間之後,估測載波頻率偏移並做補償,在經過頻率補償後 可進一步做符元時間估測,獲得正確的符元時間,然後在 DFT 過後做整數部分載 波頻率偏移估測與識別 preamble。
4.3 訊框偵測
訊框偵測
訊框偵測 [12][13][14][15]
訊框偵測
由於無線網路技術的進步,硬體的複雜度也隨之提高,功率的節省也就越來 越重要了。而訊框偵測,不但可以初步的估測前導訊號的起始位置,也決定是否 起動同步的機制,讓之後的硬體處於休止的狀態以節省功率。而訊框偵測也是第 一個同步的步驟,之後的同步接依據其結果來進行,所以相當重要。 根據4.1節的介紹,preamble在時域上有週期性,因此可對接收訊號作自相 關運算以偵測出週期峰值,決定訊框起始時間。直覺的想法是設計兩個大小同為 64(定義為 L)且相連的窗口,當訊號通過時,兩個窗口就互相做相關運算 (correlation),其數學式子如下。 1 * 0 ( ) ( ) 171, 64 L n n k m c y n k y n D k D L − = = = + + + = = ∑
(4-2) 在訊框尚未進來之前,收到的訊號為互不相關的雜訊,mn只會是一個很小 的值,而當訊框一進到窗口之中,藉由preamble所存在的相關性,mn也會隨著 變大,當大於我們所設的門檻值(threshold)時,就判定已接收到封包。這種方法 簡單且易實現,不過會有mn的分布範圍過大的問題,也就是說門檻值的設定會 更加的困難。 為了解決門檻值的設定變動過大的問題,在[26]中所提出改善的方法,就是對之前求到的cn 做正規化(normalization),此方法稱為 “delay, correlated and
normalized detection”。如式(4-3),將cn除上窗口上的總能量,我們嚴格的控制mn
在0與1之間,在設定門檻值時就方便多了。不過在硬體方面,卻得付出額外的
1 * 0 2 1 2 1 2 * 0 0 2 2 ( ) ( ) 1 1 ( ) ( ) ( ) 2 2 171, 64 L n k L L n k k n n n c y n k y n D k p y n k y n k y n k c m p D L − = − − = = = + + + = + + = + = = =
∑
∑
∑
(4-3) 訊框同步中定訂一個好的門檻值是很重要的,而影響門檻值的決定,是在於要讓假警報(false alarm)與封包遺失(miss)的機率下降,但這兩種機率值是相互衝
突的。當門檻值過高時,要被判定為封包的難度增加,假警報機率下降,但封包 遺失的機會跟著上升。當門檻值過低時,判定為封包的難度降低,封包遺失的機 會下降,但假警報的機率則上升。
4.4 載波頻率偏移估測
載波頻率偏移估測
載波頻率偏移估測
載波頻率偏移估測
OFDMA的主要的缺點之一是對載波頻率偏移非常敏感。由於傳送端和接收端 的振盪器所產生的頻率偏移,若不進行頻率偏移補償,將使子載波間正交性被破 壞,導致子載波間的互相干擾(Inter-carrier Interference, ICI),不僅本身 的信號能量下降,而且相鄰的子載波亦會對本身載波造成干擾,整體效能將受到 相當大的影響。4.4.1 現有方法
現有方法
現有方法 [16][17][18][19]
現有方法
基本上載波頻率偏移估測的原理,都是利用相隔為 D 的間距上,在複數平 面上同值同相位的兩個點,當有頻率偏移時,該兩點會因為時間的差異而產一個 相位差。於是由已知的間距D,可進一步的估算傳送與接收端的頻率偏移,這個方法,如下式所示。 1 0 1 2 2 ( ) * 0 1 2 2 0 ( ) ( ) ( ) ( ( ) ) ( ) s s s L n L j fn T j f n D T n L j fD T n z y n y n D x n e x n D e e x n π π π − ∗ = − ∆ ∆ + = − − ∆ = = + = + =
∑
∑
∑
(4-4) 我們由上式可發現∆
f
與z的相位成正比關係,所以頻率偏移估計子如下 1 ˆ 2 s f z DT π ∆ = − ∡ (4-5)然而在IEEE 802.16e OFDMA中preamble在時域上有3週期,其理想的週期取
樣點為1702 3( 512 3 ),而實際取樣點必須為整數,這將會造成多餘的誤差,因 此欲利用理想的週期取樣點前後兩點來內差其值: 1 1 1 2 ( ) ( 170 ) 3 ( )(( ) ( 170) (1 ) ( 171)) L n m L n m z y n y n y n d y n d y n − ∗ = − ∗ = = + ≈ + + − +
∑
∑
(4-6) 式(4-6)為利用內插的方法去逼近理想的週期取樣點。在[21]中,其內插的比例 僅僅只是因為理想的週期取樣點為1702 3而定1
3
d
=
,這是非常粗略的逼近,因 此在下一節中將推導出理想的內插比例。 由於z的角度− ∆2π fDTs必需明確的定義在[−π π, )之間,所以頻率偏移所能估測 的範圍為 1 1.5 2 DTs 2DTs F π ε π ≤ = = ∆ (4-7) 其中∆F為子載波間距,由式(4-7)可知,此方法可估計的頻率偏移範圍為 [ 1.5− ∆F,1.5∆F]。4.4.2 提出的方法
提出的方法
提出的方法
提出的方法
在本節中,將利用數學的推導來求得理想的內插比例以獲得完美的週期性, 並將其利用到頻率估測上,而從圖4-1可知preamble每隔3點才會有值 {1, 1}, 3 0, k k m X otherwise − = = (4-8) 因此參考2.1.1節可將式(2-1)表為如下: 2 / 2 1 / 2 / 6 2 3 3 / 6 1 [ ] 1 j kn N N k k N N j mn N m m N x n X e N X e N π π − =− =− = =∑
∑
(4-9) 因 為 取 樣 點 無 法 取 樣 在 3 N 上 , 考 慮 鄰 近 兩 點 3 N 與 3 1 N + 並 將 其 化 2 1 , 1 3 3 3 3 3 3 N N N N = − + = + ,代入式(4-9) 2 2 3 ( ) / 6 3 3 3 / 6 / 6 2 3 2 ( 2 ) 2 3 / 6 2 1 [ ] 3 3 1 N j m n N N m m N N j mn j m j m N N m m N N x n X e N X e e e N π π π π + − =− − =− + − = =∑
∑
(4-10) / 6 2 3 2 2 3 / 6 1 1 [ ] 3 3 N j mn j m j m N N m m N N x n X e e e N π π π =− + + =∑
(4-11) 欲利用 [ 2] 3 3 N x n+ − 與 [ 1] 3 3 N x n+ − 去內差為 [ ] 3 N x n+ , / 6 2 3 2 ( 2 ) 2 2 3 / 6 2 1 ( ) [ ] (1 ) [ ] 3 3 3 3 1 (( ) (1 ) ) N j mn j m j m j m N N N m m N N N d x n d x n X e e d e d e N π π π π − =− + − + − + + =∑
+ − (4-12) 其中d為所使用的內差參數。將式(4-12)與式(4-9)相比 2 ( 2 ) 2 (( ) (1 ) ) 0 j m j m N N imag d e d e π − π + − → (4-13)/ 6 42 / 3 2 ( 2 ) 2 2 / 6 42 / 3 arg min ( (( ) (1 ) ) 0) 0.44 N j m j m N N d m N d imag d e d e π π − − = − = + − − =
∑
(4-14) 由上述可知,理想的內差比例d =0.44,將其代入式(4-6) 1 2 1 2 ( ) ( 170 ) 3 ( )(0.44 ( 170) 0.56 ( 171)) L n m L n m z y n y n y n y n y n − ∗ = − ∗ = = + ≈ + + +∑
∑
(4-15) 由式(4-7)可知,此方法可估計的頻率偏移範圍為[ 1.5− ∆F,1.5∆F]。然而,在IEEE 802.16e中,CFO的值在[ 9− ∆F,9∆F],所以在之後還必須做ICFO的補償,這個部分將留到後面4.6節討論。
4.5 符元時間
符元時間
符元時間估測
符元時間
估測
估測
估測
在做完訊框偵測得知訊框起始點後,符元時間仍須進一步的估測,所以符元 時間同步是必須的。符元時間同步主要的工作是找出OFDM 每個符元起始與結束 的位置,符元起始與結束的位置之間為一個FFT 的計算範圍,將符元在過FFT前 做好同步能避免因FFT 輸入區塊取樣錯誤產生符元間相互干擾。4.5.1 現有方法
現有方法
現有方法 [20]
現有方法
在 IEEE802.16e 中有114 組 preamble 序列,在此時接收端尚未知曉傳送端 使用哪一組preamble,因此如[20]所示,利用preamble在時域上的訊號去對接收 到 的 訊 號 去 做 匹 配 進 而 估 出 正 確 的 時 間 點 的 方 法 就 不 能 使 用 。 然 而 在軛對稱的特性,可利用此特性來估出正確的符元時間,如[21]所示。 1 1 [ ] ( ) ( ) 2 2 K i N N C n y n i y n i = =
∑
+ − + + (4-16) 忽略雜訊項,上式可以被展開如下。 1 0 1 1 1 0 ( ( / 2) ) [ ] ( ( / 2) ) L l K l L i l l h x n N i l C n h x n N i l − = − = = + − − = × + + − ∑
∑
∑
(4-17) 將 ' n=n 當作preamble符元的開端,可將上式展開如下。 2 ' 2 1 1 1 1 1 2 1 1 0 2 0 1 1 1 1 2 1 1 0 2 0 2 [ ] ( ) (( / 2) ) ( 1) ( 2) ( 1) ( 2) K l i K L L l l i l l l l K L L l l i l l l l C n l h x N i h h x m i l x m i l h h x m i l x m i l = − − = = = ≠ − − = = = ≠ + = − + − − + − + − − + −∑
∑∑ ∑
∑∑ ∑
(4-18) 由上式可觀察出第2與第3項並沒有共軛對稱,其值與有共軛對稱的第一項相比 可 以 忽 略 。 所 以 上 式 的 大 小 響 應 就 意 味 著 通 道 延 遲 的 資 訊(channel delay profile),如下所示: 2 2 1 1 [ ] (( / 2) ) , 0,1..., 1 K l i C n h x N i l L = ∝∑
− = − (4-19) 由此可知,上式不僅僅可以估出 preamble 符元的開端,更可以進一步的提供 tap-delay 的資訊。但因為 preamble 不止有共軛對稱的特性還有週期性,這將會 導致上式出現5條峰值,雖然在正確的時間點時其峰值為最大,但其餘的峰值將 會增加判斷上的錯誤,尤其當運算窗口 K 值不大時,其峰值將會極為接近。圖 4-3與圖4-4分別為K=N/2與K=N/8時的C n 。由圖可以觀察出當1[ ] K值較小時, 峰值相當接近,容易因些許的雜訊與誤差而導致判斷到錯誤的 preamble 邊界, 因此在[20]中利用CP延遲相關運算來決定為哪一峰值,如下所示。 [ ] ( ) ( ) K cp C n =∑
y n i y n+ +N+i (4-20)0 100 200 300 400 500 600 700 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 |C [n ]| n cp length=16, K=N/2 圖 4-3 傳統方法在 K=N/2 0 100 200 300 400 500 600 700 0 0.5 1 1.5 2 2.5x 10 -3 |C [n ]| n cp length=16, K=N/8 圖 4-4 傳統方法在 K=N/8
4.5.2 提出的方法
提出的方法
提出的方法
提出的方法
傳統的方法為了決定正確的峰值,必須多利用CP 延遲相關運算。而提出的 方法在運算上僅會有一條峰值,不需要CP 延遲相關運算來決定峰值。 式(4-16)雖然有利用到preamble對中心點共軛對稱的特性,但是沒先考慮其 還有週期性,所以其運算方式是從中心點開始往符元頭尾兩端,而提出的方法是 從符元的頭尾兩端往中心點運算。 2 1 2 2 [ ] ( ) ( ) ˆ arg max [ ] K i n C n y n i y n N i n C n = = + + − =∑
(4-21) 式(4-20)由於是將運算方向改變,因此在特性上皆等同於式(16)。當 K=N/2 時 2[ ] C n 將會等同 C n 。而在1[ ] K= N/8時,如圖4-5所示,C n 將只會有一峰值。2[ ] 0 100 200 300 400 500 600 700 0 0.5 1 1.5 2 2.5x 10 -3 |C [n ]| n cp length=16, K=N/8 圖 4-5 提出的方法在 K=N/8然而IEEE 802.16e中定義了多種的CP長度,分別為N/32、N/16、N/8、N/4。 式(4-21)是基於CP長度較小的情形下,當CP長度大於N/6時,亦即CP長度為 N/4時,由於preamble加了一長CP,此時整個訊號約略有4個週期,所以式(4-21) 如圖4-6所示,將會有一多餘的峰值,這時可以將其改為 3 1 3 3 , cp length= / 4 6 0, otherwise [ ] ( ) ( ) ˆ arg max [ ] K i n N N D C n y n D i y n N i n C n = = = − + + − =
∑
(4-22) 上式如同(4-21),其運算方式皆為從符元的頭尾兩端往中心點運算,但在 考量到 CP 長度為 N/4,所以將符元的開頭往前調 N/6,這將避免出現多餘的峰 值,如圖4-7所示。 0 100 200 300 400 500 600 700 0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 |C [n ]| n cp length=128, K=N/8 圖 4-6 提出的方法在未處理 CP 過長時,K=N/8 , CP 長度為 N/40 100 200 300 400 500 600 700 0 0.01 0.02 0.03 0.04 0.05 0.06 |C [n ]| n cp length=128, K=N/8 圖 4-7 提出的方法在處理 CP 過長時,K=N/4 , CP 長度為 N/4
4.6 整數部分載波頻率偏移估測與
整數部分載波頻率偏移估測與
整數部分載波頻率偏移估測與識別
整數部分載波頻率偏移估測與
識別
識別
識別 preamble
不同於一般的OFDM系統,IEEE 802.16e OFDMA 擁有114組preamble序
列,基地台藉由segment number與ID cell來決定一組preamble序列,因此接收
端並不清楚收到哪一組 preamble 序列,所以必須識別 preamble。由於 preamble
的值在頻域上只是+1或- 1,而在時域上則需要用多位元來表示,為了簡化計算, 將在頻域上來識別preamble。 然而當有整數部分載波頻率偏移時,接收訊號會在頻域上偏移整數個子載波 間距,導致無法利用已知的 114 組 preamble 序列去匹配而得到正確的 preamble 編號,因此在這裡將一起同時估測整數部分載波頻率偏移與識別preamble。 preamble序列是BPSK調變且只有1/3的子載波有值,為了方便說明,在這
裡只考慮到非零的子載波編號,preamble序列表為下式:
{
}
[ ] [3 ] 1, 1 , 0,1,...,142 , 0,1,...,113, 43 l l P k P k s i k l s = + + = − = = = ɶ (4-23)其中P kl[ ]為preamble子載波值,k為所使用的子載波編號(subcarrier index),l為
preamble序列的編號,i= −1, 0,1分別代表 segment 0、segment 1 和 segment 2。 在IEEE 802.16e中,CFO的值在[ 9− ∆F, 9∆F],由於已經做過載波頻率的補償,
且因為估測範圍為[ 1.5− ∆F,1.5∆F],意味著剩餘的整數載波頻率偏移為三的倍 數,因此我們只需估計 1+18/3=7 個不同的整數載波偏移。為了方便說明,將只 討論有使用的子載波編號,如下所示: [ ] [3 3 ], 3, 2,..., 3, 0,1,...,142, 43 [ ] [ ], [3 3 ] [3 3 ] m m l Y v Y v s m m v s H v P v H v s m P v s m = + + = − − = = = = + + + + ɶ ɶ (4-24) 其中P v[ ]為傳送端所使用的preamble序列。
4.6.1 現有方法
現有方法
現有方法
現有方法
由於preamble的值在頻域上只是+1或- 1,因此在頻域上來識別preamble, 以下將介紹一些現有的方法,其主要觀念皆為利用鄰近通道響應近似。4.6.1.1 KSYP method [22]
在做完 preamble 的匹配後,[ ] [ ] [ ] [v] [ ] [ ] [v], [ ] [ ] 1 [v], [ ] [ ] 1 m l m l m l m l m l M v Y v P v m H P v P v m H P v P v m H P v P v m = + = + + = = − + = − ɶ ɶ ɶ ɶ ɶ ɶ ɶ ɶ (4-25) 為了方便將P vɶl[ +m]表為Pɶm l,[ ]v ,所以上式改為 , , , [v], [ ] [ ] 1 [ ] [v], [ ] [ ] 1 m m l m l m m l H P v P v M v H P v P v = = − = − ɶ ɶ ɶ ɶ (4-26) 由於在通道估測時,必須要先知道所使用的 preamble 序列,因此估測整數部分 載波頻率偏移與識別 preamble 是在通道估測之前,所以無法得到通道的相關資
訊,頻率選擇性衰減(frequency selective fading)可以利用鄰近子載波的通道 響應差異來得到補償,因此在假設通道的同調頻寬(coherence bandwidth)大於 非零子載波的間距,鄰近的子載波的通道響應會相近 [ 1] [ ] m m H vɶ + ≈H vɶ (4-27) 利用鄰近通道響應補償頻率選擇性衰減 , , * , , , , 2 , , [v] [v+1], [ ] [ ] [ 1] [ 1] 1 [ ]( [ 1]) [v] [v+1], [ ] [ ] [ 1] [ 1] 1 [v] , [ ] [ ] [ 1] [ 1] 1 m m m l m l m l m l m m m l m l m m l m l H H P v P v P v P v M v M v H H P v P v P v P v H P v P v P v P v ∗ ∗ + + = + = − + + = − + + = ≈ − ɶ ɶ ɶ ɶ ɶ ɶ ɶ ɶ ɶ ɶ ɶ ɶ 2 , , [v] , [ ] [ ] [ 1] [ 1] 1 m m l m l H P v P v P v P v + + = − ɶ ɶ (4-28) 將m=m lˆ , =lˆ,視為對到正確的preamble序列時 ˆ ˆ , [ ] [ ] 1, 0,1,...,142, m l P v Pɶ v = v= (4-29) 將式(4-29)代入式(4-28)可得 2 * ˆ ˆ ˆ ˆ,[ ]( ˆ, [ 1]) m[v] m l m l M v M v+ ≈ ɶH (4-30) 比較式(4-28)與式(4-30),可以觀察出當對到正確的 preamble 序列時,上式為 一恆正的數列,而當對到錯誤的 preamble 序列時可能正也可能負。因此對不同
141 * 0 , , 0 141 , , 0 ( , ) [ ]( [ 1]) [ ] [ 1] [ ] [ 1] m l m l v m m m l m l v F m l M v M v Y v Y v P v P v = ∗ = = + = + +
∑
∑
ɶ ɶ ɶ ɶ (4-31) 藉由尋找最大的價值函數估測整數部分載波頻率偏移與識別preamble 0 , ˆ ˆ , arg max( ( , )), -3,-2,...,3, 0,1,...,113 m l m l F m l m l < >= = = (4-32) 為了方便之後比較,將式(4-31)化為如下 2 * 2 [v] , [ ] [ 1] 1 ( ) ( [ ]( [ 1]) ) [v] , [ ] [ 1] 1 m m m m m H P v P v A v Y v Y v H P v P v + = = + ≈ − + = − ɶ ɶ ɶ ɶ ɶ (4-33) , , , , , 1, [ ] [ 1] 1 ( ) 1, [ ] [ 1] 1 m l m l m l m l m l P v P v A v P v P v + = = − + = − ɶ ɶ ɶ ɶ (4-34) 0( , ) m( ) m l,( ) v F m l =∑
A v Aɶ v (4-35)4.6.1.2 ML method [23]
基於KSYP method的基礎上,在[13]推導出在AWGN與已知的通道下的最大概 似法則(maximum likelihood)估測,由於一般情形下估測整數部分載波頻率偏移 與識別preamble是在通道估測前,我們無法得知通道的情形,所以在這裡只介紹 在AWGN下推導的ML method: 141 * 1 , , 0 ( , ) ( m l[ ]( m l[ 1]) ) v F m l real M v M v = =∑
+ (4-36) 1 , ˆ ˆ , arg max( ( , )), -3,-2,...,3, 0,1,...,113 m l m l F m l m l < >= = = (4-37) 詳細的推導可以參照[13],但可以簡單的從式(4-28)中看出,在AWGN下當對到 正確的 preamble 序列時只有實數部分,造成虛數部分的主要原因為雜訊,因此 只需要考慮實數部分即可。 為了方便之後比較,將式(4-36)化為如下2 * 2 [v] , [ ] [ 1] 1 ( ) ( [ ]( [ 1]) ) [v] , [ ] [ 1] 1 m m m m m H P v P v B v real Y v Y v H P v P v + = = + ≈ − + = − ɶ ɶ ɶ ɶ ɶ (4-38) , , , , , 1, [ ] [ 1] 1 ( ) 1, [ ] [ 1] 1 m l m l m l m l m l P v P v B v P v P v + = = − + = − ɶ ɶ ɶ ɶ (4-39) 1( , ) m( ) m l, ( ) v F m l =
∑
B v Bɶ v (4-40)4.6.1.3 Ting’s method [21]
由於上述方法的計算量過於複雜,在[21]推導出一化簡計算量的方法。利用 鄰近的通道響應近似對訊號做相減的動作 [ ] [ 1] [v] [ ]- [v+1] [ 1] 0, [ ] [ 1] 1 2 [v] , [ ] [ 1] 1 m m m m m Y v Y v H P v H P v P v P v H P v P v − + = + + = ≈ + = − ɶ ɶ ɶ ɶ ɶ (4-41) 將上式的結果僅用一數位碼來表示 0, [ ] [ 1] 1 [ ] [ 1] 1, [ ] [ 1] 1 m m P v P v Y v Y v P v P v + = − + = + = − ɶ ɶ (4-42) 對不同子載波的運算結果做累加,定義一價值函數並將其化為式(4-33)、式 (4-34)、式(4-35)的形式 0, [ ] [ 1] [ ] [ 1] ( ) 1, [ ] [ 1] [ ] [ 1] m m m m m m m m m Y v Y v Y v Y v C v Y v Y v Y v Y v − + < + + = − + ≥ + + ɶ ɶ ɶ ɶ ɶ ɶ ɶ ɶ ɶ (4-43) , , , , , 0, [ ] [ 1] 1 ( ) 1, [ ] [ 1] 1 m l m l m l m l m l P v P v C v P v P v + = = + = − ɶ ɶ ɶ ɶ (4-44) 藉由尋找最大的價值函數估測整數部分載波頻率偏移與識別preamble , , 3 , ˆ ˆ , arg min( ( ) ( )) arg min( ( , )) m m l m l v m l m l C v C v F m l < >= ⊕ =∑
ɶ(4-45)
在此方法中,利用了一簡單的數位碼來代替相減的運算結果,因此其效能比ML method 中用多位元來表達差,但是其相對的好處就是複雜度低,且F m l3( , )值座 落於+/-142間,這也可以使得硬體負擔減少。
![圖 2-4 OFDM 與 OFDMA 的主要差異 [8] 然而為了支援多用戶,OFDMA 在實做上會變的複雜,尤其是在控制電路上將 會造成額外的負擔,例如在上傳時需控制各使用者的傳輸能量,避免過大影響其 餘使用者。 2.2.2.](https://thumb-ap.123doks.com/thumbv2/9libinfo/7643431.138285/22.892.126.761.110.786/複雜是在控制電路上將會造成額外的負擔例如在上傳時需控制各過大.webp)

![圖 3-1 OFDMA 子通道配置圖 [3]](https://thumb-ap.123doks.com/thumbv2/9libinfo/7643431.138285/27.892.158.734.132.288/圖31OFDMA子通道配置圖3.webp)
![圖 3-3 多種排列模式的 OFDMA 訊框 [4]](https://thumb-ap.123doks.com/thumbv2/9libinfo/7643431.138285/28.892.150.780.150.823/圖33多種排列模式的OFDMA訊框4.webp)
![圖 3-4 TDD 模式下的訊框架構 [4]](https://thumb-ap.123doks.com/thumbv2/9libinfo/7643431.138285/30.892.156.739.521.1003/圖34TDD模式下的訊框架構4.webp)
![表 3-3 OFDMA 下行之 PUSC 模式下的子載波放置[4]](https://thumb-ap.123doks.com/thumbv2/9libinfo/7643431.138285/34.892.148.747.159.1095/表33OFDMA下行之PUSC模式下的子載波放置4.webp)
![圖 3-7 QPSK、16QAM 和 64QAM 星座圖 [4] 3.3.3. 3.3.23.23.2 3.2 上行上行 上行 上行](https://thumb-ap.123doks.com/thumbv2/9libinfo/7643431.138285/36.892.146.702.105.708/圖3QPSKQAM和QAM星座圖433332323232上行上行上行上行.webp)
![圖 3-8 OFDMA 上行之資料配置規則範例 [4] 3.3.3. 3.3.23.23.2 3.2.2 .2 .2 .2 ULUL UL 子載波的配置UL子載波的配置子載波的配置 子載波的配置 在 UL 中以 tile 來當做配置的單位,如圖 3-9 所示。Tile 由連續 4 個子載 波和連續 3 個 OFDMA 符元時間所組成,其中含有 4 個 pilot subcarriers 和 8 個 data subcarriers。詳細的配置以 1024](https://thumb-ap.123doks.com/thumbv2/9libinfo/7643431.138285/37.892.153.719.129.733/子載波配置UL子載波配置子載波配置子載波配置中以由連符元時間.webp)