Journal of Engineering Technology and Education, ISSN 1813-3851
Optimization of Process Parameters and Fatigue Prediction for Flexure-Based
Compliant Mechanism
Thanh-Phong Dao, Shyh-Chour Huang* Department of Mechanical Engineering National Kaohsiung University of Applied Sciences,
Kaohsiung 80778, Taiwan *E-mail: [email protected]
Abstract
This study focuses on analysis and optimization for a rectangular leaf flexure hinge. The analysis was performed by employing pseudo-rigid-body model (PRBM) and the principle of virtual work. The PRBM was validated by using the finite element analysis (FEA). The simultaneously multi-objective structural optimization, such as the maximum torque of torsional spring and the minimum stress at flexible pivot, carried out using the fuzzy logic based on Taguchi method. ANOVA was used to find the most significant parameter. This investigation also focuses on predicting the fatigue strength of flexure hinge. Kinematic and static equations were formulated. The FEA results are a good agreement with the PRBM. The optimal results indicated that the input horizontal force of 0.8896
N
and rotary angular of 0.4363 radian. An input rotational angle is the most significant parameter with contribution of 44.2544 %. The fatigue analysis determined that the mechanism could reach approximately one million life cycles before failure.Keywords: Flexure Hinge, Pseudo-Rigid-Body Model, Optimization, Fuzzy Logic Based on Taguchi Method, Fatigue Strength.
1. Introduction
In recent years, the compliant mechanisms (CMs) are well-known that are the elastic mechanisms based on the elasticity of flexible beams or flexure hinges so that transfer translational and/or rotational motions into the translational and/or rotational motions. CMs also called as flexible, monolithic structures. So far, CMs are that there has much increasing attention in automotive, space and appliance due to more accurate, cleaner, less noisy, and most importantly, less expensive to manufacture and maintain than conventional devices. There have numerous applications of flexure hinges in both macro- and microscale as: MEMS, automotive industry, computers and fiber optics applications. For examples, including optical switches, miniature load cells, flexible mounts for imaging masks, load-sensitive resonators, gyroscopes, disc memory head positioners, wire bonding heads, microaccelerometers, and cantilevers for microscopy.
Traditional bearing is commonly utilized in machine design based on rolling elements where allow rotation between two rigid parts. They are easy to manufacture and assemble. However, because of friction between the contact surfaces, rolling-element bearing is much energy loss. Therefore, bearing usually need lubrication to reduce friction and remove heat. To overcome the disadvantages of conventional bearings, a flexure hinge with rectangular cross-section was used in this study. In present study, a flexure hinge is innovative design which has
the same functions of traditional bearing. Overcome limitations of traditional kinematic joints, flexure hinges take some advantages as: non-friction, no need lubrication, ease of fabrication, and no maintenance. There are however certain drawbacks in flexure-based compliant mechanisms: (1) there is no pure rotation due to flexure deformation is complicate and (2) relative rotation with rotary center is not fixed during motion. Another disadvantage is that flexure hinges are temperature-sensitive and therefore thermal changes will modify their physical dimensions. Consequently, the compliance/stiffness properties will affect the motion precision and repeatability. Under dynamic loading conditions CMs will introduce failures like the fatigue that approaches to fracture overall structure. As a result, the desired structure of flexure hinge will be optimized in this study to meet the user-specified motion requirements such as the large enough deflection/displacement required while the stresses below an allowable maximum stress.
Several approaches have increased to address CMs by applying optimal design and synthesis procedures. Frecker et al. [1] presented topology of CMs with multiple outputs. A pseudo-rigid-body (PRBM) method used to analyze nonlinear large displacement performed by Pei et al. [2] in 2010. According to Tanık and Söylemez [3] analyzed and designed of an underactuated compliant variable stroke mechanism by employing PRBM. In 2003, Lobontiu and Garcia [4] formulated an analytical method for displacement and stiffness calculations of planar compliant mechanisms with single-axis flexure hinges. The procedure is based on the strain energy and Castigliano’s displacement theorem and produces closed-form equations.
In addition to the optimal result of the separately individual objectives are usually conflicts each other in the optimization process. In past decades, there have increasing interested optimal procedures such as Taguchi method, genetic algorithm (Gas), fuzzy logic controller (FLC) that used in almost industrial fields. Unfortunately, Taguchi method is only capable to optimize individual objectives separately; in contrast to single objective optimization, the suggested approaches like GAs, FLC, FLC combined GAs and/or Taguchi method are likely to optimize multi-objectives simultaneously. In such cases, in order to solve the conflict optimal issues between multi-objectives, the fuzzy logic based on Taguchi method (FLTM) has been utilized like the most effective tool recently. Eşme [5] optimized the welding parameters using Taguchi method. Lin and Kuo [6] optimized structural design of drawing dies using FLTM in 2010. Another study by Hsiang et al. [7] found optimal process parameters that maximize MRPI based on FLTM for hot extrusion of AZ31 and AZ61 magnesium alloy bicycle carriers. Sze´kely and Szalay [8] suggested a systematic design procedure for two-fingered microgripper with flexure hinges. According to Venanzi et al. [9] presented an iterative technique to perform the non-linear position analysis of planar CMs. In 2008, N.T. Pavlovic´ and N.D. Pavlovic [10] performed a design of the compliant mechanism being capable to realize axial link translation. In 2005, the compliant contact-aided revolute joint, a planar mechanism capable of performing the functions of a bearing and a spring designed using PRBM by Cannon and Howell [11]. Khatait et al. [12] analyzed the dynamics of a flapping compliant mechanism consisting of two flexure hinges using minimum torque approach. In 2005 as well, optimization of multi-objective topology of CMs-continuum structures conducted by Luo et al. [13] using a density interpolation scheme, the rational approximation of material properties method, and a globally convergent version of the method of moving asymptotes. Huang et al. [14] designed and fabricated a microgripper with a topology optimal compliant mechanism in 2009. Ugwuoke et al. [15] investigated dynamic behavior of compliant slider mechanism using the PRBM in 2009 as well. Another study also in 2009 by Boyle et al. [16] gave a mathematical dynamic model for compliant, constant-force compression mechanisms using PRBM. Dado [17] presented a variable parametric
PRBM for large-deflection beams with end loads. More recent work in 2013, Osakue et al. [18] reported a probabilistic design approach for the Gerber bending fatigue failure rule using sensitivity-based analysis. Also in 2013, Dirksen et al. [19] studied incorporation of flexural hinge fatigue-life cycle criteria into the topological design of compliant small-scale devices.
This investigation first concentrates on design, analysis of the fatigue strength of flexure hinge. Next, finite element analysis (FEA) was used to validate for PRBM theory. After that, the study presents the application of the FLTM to multi-objective structural optimization of flexure hinge in CMs. The maximum torque of torsional spring and the minimum stress are two objective functions were formulated by PRBM that required to be optimized simultaneously to meet user-desired requirements.
2. Modeling of Flexure Based Compliant Mechanism
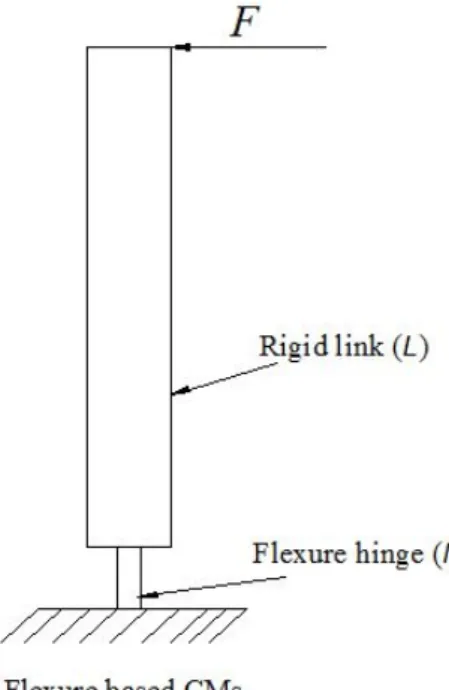
Based on the results of previous study by Dirksen et al. [20], a rectangular cross-section flexure hinges have low bending stiffness with very high rotational deflection while circular cross-section flexure hinges obtain medium bending stiffness with high rotational deflection and parabolic cross-section flexure hinges achieve high bending stiffness with low rotational deflection. A rectangular leaf flexure hinge is selected to achieve single-axis flexure hinge and large deflection with low bending stiffness. Figure 1 shows a model of flexure based CMs, including a rigid link and a rectangular cross-sectional flexure hinge.
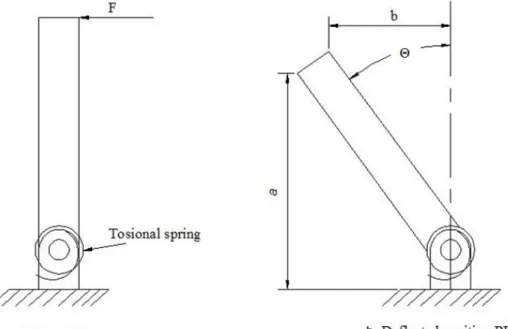
To analyze nonlinear-large deflection, the use of the Bernoulli-Euler theory is very difficult; as a recent result, the theory PRBM [21] as an effectively alternative approach that has utilized to design and analyze nonlinear-large deflection by modeling a flexure hinge into a rigid link with a torsional spring located rotational center as in Fig.2a. A deflected model after a mobile link rotates a specific angular, Θ, is presented in Fig.2b.
Fig. 2. PRBM of flexure hinge: a. initial position, b. deflected position
3. Kinematic and Static Analysis of Flexure Based Compliant Mechanism
A total length of rigid body which composes of mobile link connected with link AB is equal toL127mm, a length of flexure hinge isl12.7mm. A compliant rotary joint is rectangular cross-sectional flexure hinge with the
out of plane thickness,w22.86mm the in of plane thickness, h0.762mm. Load conditions include a horizontal force acts on a mobile body, has the range from 0.8896N to 88.9644N . This flexure hinge made of polycarbonate with a Young’s modulus E2000MPa with ultimate tensile strength equals to 70 MPa, yield strength equals 65 MPa. The chosen angular, Θ, is generalized coordinate for this issue. In case study, this paper will analyze the relationship between non-linear displacement and applied forces; the paper concentrates on the maximum stress occurs at fixed end of flexible pivot as well. The virtual work [21] used for analyzing kinematics and statics as follows:
A horizontal coordinate of a horizontal deflection, b, is
sin
2
l
b
L
(1)The virtual horizontal translational displacement, δb , is differential of position vector is
cos
2
bl
L
(2)Torque of flexure hinge required to deflect a torsional spring through an angular of Θ is
T
K
EI
K
l
(4)Inertia torque of flexure hinge cross section is
3
12
wh
I
(5)The total virtual work for the pseudo-rigid-body model is
cos
2
l
W
F L
T
(6)Application of total virtual work is equal to zero, the torque of spring at pin joint results in
cos
2
l
T
F L
(7)The horizontal deflection calculated in terms of L, l, and vertical coordinate of end mobile, a, is
x
L l
a
(8)The maximum stress, σmax, occurs at the fixed end and calculated as follows:
max 2
6Fa
wh
(9)where a is the vertical direction coordinate of the beam’s end as
cos
2
2
l
l
a
L
(10) As a result max 26
cos
2
2
l
l
F
L
wh
(11)
/ 2 sin
/ 2
K
F
L l
(12)The torque, T, is proportional with the angular displacement, δΘ, T Kin magnitude with K is the stiffness constant of spring, i.e., the larger the value of torque is, larger the value of angular displacement is. From Eq.11the maximum stress, σmax, occurs at the fixed end and was calculated terms of two variables composed of F and Θ. Fig. 3 derives the linear relationship between the max stress and the horizontal displacement that considers an approximately linear equation as follows:
1
2020
x
y
(13)Fig. 3. A relationship between the maximum stress versus the horizontal displacement
4. Optimization of Flexure Based Compliant Mechanism
4.1 Formulation of the optimization problem
In this section, this study determines the optimal process parameters that influence the structure of a flexure hinge by simultaneous optimizing the torque of torsional spring and stress at fixed end of flexure hinge. The optimization problem for proposed CMs is formulated as follows:
Maximize the torque of torsional spring:
1,
cos
2
l
f F
F L
(14)References
[1] Frecker, M., Kikuchi, N., and Kota, S., “Topology optimization of compliant mechanisms with multiple outputs”,
Structural Optimization, Vol. 17, pp. 269-278, 1999.
[2] Pei, X., Yu, J.J., Zong, G.H., and Bi, S.H., “An effective pseudo-rigid-body method for beam-based compliant mechanisms”, Precision Engineering, Vol.34, pp. 634-639, 2010.
[3] Tanık, E. and Söylemez, E., “Analysis and design of a compliant variable stroke mechanism”, Mechanism and Machine
Theory, Vol. 45, pp. 1385-1394, 2010.
[4] Lobontiu, N. and Garcia, E., “Analytical model of displacement amplification and stiffness optimization for a class of flexure-based compliant mechanisms”, Computers and Structures, Vol. 81, 2797-2810, 2003.
[5] Eşme, U., “Application of Taguchi method for the Optimization of Resistance Spot Welding Process”, The Arabian
Journal for Science and Engineering, Vol. 34, number 2B, 2009.
[6] Lin, B.T. and Kuo, C.C., “Application of the fuzzy-based Taguchi method for the structural design of drawing dies”, Int J
Adv Manuf Technol, Vol. 55, pp. 83-932011.
[7] Hsiang, S.H., Lin, Y.W., and Lai, J.W., “Application of fuzzy-based Taguchi method to the optimization of extrusion of magnesium alloy bicycle carriers”, J Intell Manuf, Vol. 23, pp. 629-6382012.
[8] Sze´kely, F. and Szalay, T., "Design procedure of planar compliant microgrippers with flexural joints, Multi-Material Micro Manufacture”, pp. 247-250, 2006.
[9] Venanzi, S., Giesen, P., and Castelli, V. P., “A novel technique for position analysis of planar compliant mechanisms”,
Mechanism and Machine Theory, Vol. 40, pp. 1224-12392005.
[10] Pavlovic´, N. T. and Pavlovic´, N. D., “Compliant mechanism design for realizing of axial link translation”, Mechanism
and Machine Theory, Vol. 44, pp. 1082-10912009.
[11] Cannon, J.R. and Howell, L.L., “A compliant contact-aided revolute joint”, Mechanism and Machine Theory, Vol. 40, pp. 1273-1293, 2005
[12] Khatait, J.P., Mukherjee, S. and Seth, B., “Compliant design for flapping mechanism: A minimum torque approach”,
Mechanism and Machine Theory, Vol. 41, pp.3-16, 2006.
[13] Luo, Z., Chen, L., Yang, J., Zhang ,Y., and Malek, K.A., “Compliant mechanism design using multi-objective topology optimization scheme of continuum structures”, Struct Multidisc Optim, Vol. 30, pp. 142-154, 2005.
[14] Huang, S.C., Chiu, C.C., and Chen, W.L., “Design and fabrication of a microgripper with a topology optimal compliant mechanism”, Int. J. Computational Materials Science and Surface Engineering, Vol. 2, Nos. ¾, 2009.
[15] Ugwuoke, C. I., Abolarin, S. M., and Ogwuagwu, V. O., “Dynamic Behavior of Compliant Slider Mechanism using the Pseudo-Rigid-Body Modeling Technique”, AU J.T, Vol. 12, pp. 227-234, 2009.
[16] Boyle, C., Howell, L.L., Magleby, S. P., and Evans, M., “Dynamic modeling of compliant constant-force compression mechanisms”, Mechanism and Machine Theory, Vol. 38, pp. 1469-14872003.
[17] Dado, M.H., “Variable parametric pseudo-rigid-body model for large-deflection beams with end loads”, International
Journal of Non-Linear Mechanics, Vol. 36, pp. 1123-11332001.
[18] Osakue, E.E., “Probabilistic Design with Gerber Fatigue Model”, Mechanical Engineering Research, Vol. 3, No. 1, 2013. [19] Dirksena, F., Anselmanna, M., Zohdi, T.I., and Lammering, R., “Incorporation of flexural hinge fatigue-life
cycle criteria into the topological design of compliant small-scale devices”, Precision Engineering, Vol. xxx, pp. xxx-xxx, 2013.
[20] Dirksen, F. and Lammering, R., “On mechanical properties of planar flexure hinges of compliant mechanisms”, Mech. Sci, Vol. 2, pp. 109-117, 2011.
[21] Howell, L.L., Compliant Mechanisms, John Wiley and Sons Inc., New York, 2001. [22] Lobontiu, N., Compliant mechanisms: Design of flexure hinges. CRC Press, 2003.