國立高雄大學電機工程學系
碩士論文
壓縮感知於多重通道傳輸之應用
Application of compressed sensing for multi-channel
transmission
研究生:陳柏良 撰
指導教授:黃祥哲 博士
i
ii
壓縮感知於多重通道傳輸之應用
指導教授:黃祥哲 博士 國立高雄大學電機工程學系 學生:陳柏良 國立高雄大學電機工程學系碩士班 摘要 影像可以清楚的表達出訊息所要呈現的意義。現在日常生活已經離不開以影像資 訊傳遞訊息,又由於影像的傳輸資料量大,在有限頻寬的限制下傳遞影像資訊需 要經過壓縮之後才可提升傳輸效率。近幾十年來,有不少與影像壓縮有關的國際 標準問世。本論文中,我們採用近幾年提出的壓縮感知演算法,進行研究。壓縮 感知與過去的國際標準方法比較,具有更好的壓縮效率。壓縮過的資訊透過傳輸 媒介,可能遭受雜訊或丟失的等因素,導致解碼端發生錯誤。因此如何針對壓縮 感知訊號進行有效傳輸,為本論文研究的重點。我們將壓縮感知訊號,透過多重 通道進行傳輸。同時,並利用多重描述編碼的保護方式,觀察重建影像的改善情 況。同時引進傳統的錯誤更正碼保護方式,進行比較。實驗結果可以發現,透過 多重描述編碼方法所引進的相關性,以及錯誤更正碼的保護能力,大多可以抵抗 通道丟失所帶來的傷害。本論文提出的方法,未來也具有落實到實際應用的潛 力。 關鍵字:數位影像、壓縮感知、資料傳輸、多重描述轉換編碼、錯誤更正碼。iii
Application of compressed sensing for multi-channel
transmission
Advisor(s): Dr. Hsiang-Cheh Huang Institute of Electrical Engineering National University of Kaohsiung
Student: Po-Liang Chen Institute of Electrical Engineering National University of Kaohsiung
ABSTRACT
Images are important media because that can represent the information precisely. Due to the massive size of image files, how to perform compression effectively is the major task for tablets or smartphones. There have been lots of international standards for fulfilling the compression procedures. In this thesis, unlike using conventional techniques, we employ the recently developed scheme named compressed sensing for data compression. In addition to the effective compression, we also aim at the robust transmission of compressed sensing signals over lossy channels. We employ two techniques for protecting compressed sensing signals, namely, multiple description coding and error control codes, for fulfilling the requirement of robust transmission. Simulation results have presented the alleviation of reconstructed image qualities for the use of correlations with the coefficients in multiple description coding, and the inherent characteristics of error correction with error control codes. Proposed methods also have the potential for the integration into practical implementations in the future. Keywords: Digital Images、Compressed Sensing、Data Transmission、Multiple
iv
致謝
經過了二年的努力,終於完成此篇碩士論文。首先,最感謝的當然是我的指 導教授黃祥哲老師,從研究的方法與方向到論文的撰寫指導,都有詳盡的指證與 教導,使我在研究的過程中可以更有效率地找到研究的重點與解決的方案,在完 成此篇碩士論文之後自然得到豐富的收穫。在研究態度上的養成,也正是我這兩 年學程所學到重要的一門課。相信這態度無論於何種場合將受益無窮。 也要真摯的感謝張峯誠 教授與龎一心 教授撥空主持學位口試,其對於論文 的撰寫指正與研究主題討論上極其豐富,幫助論文的定稿之後的完整性有莫大的 助益。系辦的怡分與薏婷,在一些行政流程上的說明使我在處理事情更有效率, 讓我在有限的研究時間上安排得宜。也謝謝實驗室的學弟學妹,研究過程的一些 瑣事總是不厭其煩地幫忙,認識你們是這兩年最開心的事之一。 最後要感謝親朋好友們在適當的時間給與必要的協助,對於我碩士學業的完 成有莫大的幫助。如今此領域上的研究所撰寫的論文知識有助於我以更宏觀的視 野討論之後的專業課題,這讓我在人生下一步階段的安排有好的開始,特此銘 謝。 陳柏良 於高雄大學 2016 年 6 月v
目錄
學位論文審定書... i 中文摘要... ii Abstract... iii 致謝... iv 目錄... v 圖目錄... vi 第一章... 1 緒論... 1 1.1 研究動機與背景... 1 1.2 研究目標... 2 1.3 研究方法... 3 1.4 論文架構... 4 第二章... 5 壓縮感知與壓縮數據保護的背景與討論... 5 2.1 壓縮感知簡介... 5 2.2 壓縮與重建的觀念與方法... 6 2.3 多重描述轉換編碼簡介... 12 2.4 模擬方法與變數說明... 16 第三章... 20 數據資料的保護方法... 20 3.1 單通道傳輸與雙通道傳輸 ... 20 3.2 資料保護策略 ... 25 第四章... 28 數據資料傳輸的模擬結果與討論... 28 4.1 PCT 行為模擬 ... 28 4.2 PCT 最佳選取參數重建品質趨勢曲線... 30 4.3 影像資訊非均勻保護與 PCT 變異數... 34 4.4 壓縮感知數據應用於通道傳輸... 37 第五章... 61 結論與未來展望... 61 5.1 結論... 61 5.2 未來展望... 62 參考文獻... 63vi
圖目錄
圖 2-1 壓縮感知編碼流程圖 ... 6 圖 2-2 壓縮感知重建流程圖 ... 6 圖 2-3 壓縮感知軟體程序流程圖 ... 11 圖 2-4 多重描述轉換編碼方塊圖 ... 12 圖 2-6 增加稀疏性訊號 ... 18 圖 2-7 增加不連貫性雜訊訊號 ... 18 圖 2-7 增加不連貫性雜訊訊號(續)... 19 圖 2-8 隨機中斷雜訊干擾 ... 19 圖 3-1 壓縮感知重建 ... 20 圖 3-2 單通道傳輸流程圖 ... 21 圖 3-4 θ1和 θ2 PSNR 重建品質趨勢圖 ... 24 圖 3-5 θ1和 θ2 SSIM 重建品質趨勢圖 ... 24 圖 3-6 PCT 重建比較... 26 圖 4-1 C_ES PCT 保護重建 PSNR 曲線... 31 圖 4-2 C_ES PCT 保護重建 SSIM 曲線... 31 圖 4-3 10% Lossy C_ES PCT 保護重建輸出影像 ... 33 圖 4-4 離散餘弦係數之 DC 數據保護重建曲線 ... 35 圖 4-5 25% Lossy 包含 DCT 直流數據不平等保護重建輸出影像 ... 36 圖 4-6 B A r PSNR 曲線 ... 37 圖 4-7 C-ES 與 P-C-ES PCT 保護重建 PSNR 曲線... 38圖 4-8 C-ES 與 P-C-ES SSIM 曲線 ... 38
圖 4-9 C-ES 和 P-C-ES PCT 保護重建輸出影像... 39 圖 4-10 BCH 傳輸程序模擬 ... 40 圖 4-11 多數決策傳輸程序模擬 ... 41 圖 4-12 BCH 參數重建比較 PSNR... 42 圖 4-13 BCH 參數重建比較 SSIM... 43 圖 4-14 5% 與 10% Lossy BCH 重建結果... 44 圖 4-15 5% 與 10% Lossy BCH RGB 1024x1024 重建結果 ... 45 圖 4-15 5% 與 10% Lossy BCH RGB 1024x1024 重建結果(續) ... 46 圖 4-16
2
1 BCH 多數決策 C-ES 和 P-C-ES PCT PSNR 曲線 ... 48 圖 4-17 BCH 多數決策 C-ES PCT SSIM 曲線 ... 49 圖 4-18 各類保護輸出比較 ... 50 圖 4-19 10% Lossy PCT RGB 1024x1024 以 C-ES 重建結果 ... 51vii 圖 4-19 10% Lossy PCT RGB 1024x1024 以 C-ES 重建結果(續) ... 52 圖 4-19 10% Lossy PCT RGB 1024x1024 以 C-ES 重建結果(續) ... 53 圖 4-19 10% Lossy PCT RGB 1024x1024 以 C-ES 重建結果(續) ... 54 圖 4-19 10% Lossy PCT RGB 1024x1024 以 C-ES 重建結果(續) ... 55 圖 4-19 10% Lossy PCT RGB 1024x1024 以 C-ES 重建結果(續) ... 56 圖 4-20 10% Lossy PCT RGB 1024x1024 以 P-C-ES 重建結果 ... 57 圖 4-21 10% Lossy PCT RGB 1024x1024 以 P-ES 破壞輸出 ... 58 圖 4-22 10% Lossy PCT RGB 1024x1024 以 P-ES 破壞重建輸出 ... 59
1
第一章
緒論
1.1 研究動機與背景
隨著現代生活已經完全離不開數位資訊,而現代資訊大都以多媒體呈現,其 中即包含影像資訊,相對於過去僅與文字表示具有更大的數據量。數位資訊的傳 輸由於頻寬的限制以及效率的考慮,資訊在傳輸之前必須經過訊源編碼(Source coding)的技術以減少傳輸資訊的大小,讓整體的資源可以更有效率的運用。除此 之外,隨著通訊裝置的普及以及價格可為一般民眾可接受,資訊的傳輸量龐大, 儘管當代的傳輸硬體科技的進步,對於資訊量的承載和數據傳輸的速度足以應付 傳輸的需求,但可以想見往後的數據傳輸量只會越來越大,如此巨大的資訊量和 數據僅以傳統的訊源編碼技術無法分析其中相關性的多寡,亦無法透過資訊的相 關性分析來減少數據量。 傳統的數據量壓縮的方式主要是基於捨棄相對小的能量的破壞性壓縮或者 是仙儂理論將資訊量減少至盡量接近最短編碼長度達到壓縮的目的。這些技術已 經使用的相當長的一段時間。直到近十年來利用統計最佳化的觀念設計的縮短紀 錄數據量的長度之技術,在統計的取樣的過程中可以分析資訊的相關性程度,降 低取樣速率至低於傳統仙儂所定義的最短長度而達到與傳統壓縮方法更加有效 率的儲存和傳輸資訊的方式。此技術方法稱:壓縮感知(CS)。可以預見在未來的 發展上,有極具深入研究的價值。 壓縮感知達到壓縮的數據的主要觀念為將高維度(High Dimension)的原始數 據資料,透過適當的演算投影到低維度(Low Dimension)並記錄,以利後續處理。2
壓縮感知以低維度壓縮數據重建原來資料的技術主要是基於凸函數 (Convex function)最佳化運算來完成。運算將預估出與原始資料差異最接近的結果.令我 們感興趣的是當壓縮的資訊在傳輸通道受到不同比例的破壞之後,將之重建,以 及透過固有技多重描述轉換編碼(MDTC)和錯誤更正碼(BCH)編碼後,運用於 Pairwise Correlation Transformer(PCT)之雙通道傳輸與單通道傳輸和受破壞重 建之後的結果,了解最佳化重建與以上的 PC 與錯誤碼更正運用上的可行性與重 建行為。
1.2 研究目標
傳統的壓縮技術和資訊傳輸的保護技術使用的幾十年來都沒有太大的變革, 與過去的壓縮方式最大的不同是壓縮感知在重建是利用統計最佳化的技巧達成, 過去沿用幾十年的壓縮方法以多重描述轉換編碼或者是錯誤更正碼 BCH 保護之 下對於受破壞的數據資料回復效果可行,但是對於統計壓縮之後的數據,破壞之 重建的可行性以及參數的設定有需要討論。因此,我們的方法將設計模擬雙通道 數據的傳輸,特定通道相對受破壞程度較大的傳輸,通道中特定數據破壞之後重 建的結果。多重描述(MD)的雙通道設計參數是以 Pairwise correlation transform (PCT) 參數規劃,各個參數的變動對於破壞之後的重建也會給與紀錄。 除了以 PCT 對壓縮資訊做保護編碼之外,我們亦使用 BCH 錯誤更正碼的技 術來實行相同的實驗,BCH 錯誤更正碼需要使用 Galois field 對其壓縮過後的數 據做編碼,其與之保護強度的設定相互關係也將給與紀錄.也將比較兩者保護數 據在同樣的破壞強度之下重建後的效果。 以彩色影像作為實驗的目標,除了鑒於當今商用或者是研究的影像工程其輸 出皆為彩色影像,對於三色頻; Red、Green 和 Blue;如何在做數據保護編碼之前 先做一資料處理的考量以利於參數的設定,以達到參數設定的便利性。破壞之後的數據經過重建後,影像的品質將透過 PSNR(Peak Signal to Noise Ratio)雜音比的比較和使用 SSIM 影像結構相似度的比較來觀察破壞和重建之後
3 的影像品質回復的程度。 我們的目標將致力於分析壓縮感知方法壓縮過後的數據,結合上述的各種保 護方式和歸納參數的設定使的重建後的資料的 PSNR 與 SSIM 可以提高,也會討 論是否以單通道傳輸的優缺點和可行性,如此可以節省設備的成本。
1.3 研究方法
我們的壓縮數據,是使用離散餘弦係數以及 Noiselet 係數,以模擬當傳輸通 道僅傳輸離散餘弦係數時候,在接收端接收到之後受到以 Noiselet 係數雜訊干擾 的情形以壓縮感知的重建演算法可以將原來資訊重建至一定的品質。由受到 Noiselet 干擾之後的壓縮數據,將設計一個隨機破壞的程序,針對離散餘弦轉換 壓縮係數以及 Noiselet 係數做不同程度的破壞,以模擬通道丟失的雜訊。我們將 紀錄破壞之後的重建結果以及使用保護技術保護之後,可以得到的效益。我們預 估,受到所破壞的隨機錯誤碼的雜訊將會降低壓縮感知的重建品質,而當壓縮感 知的保護技術重建之後,有助於協助壓縮感知數據抵抗非 Noiselet 雜訊的干擾破 壞。4
1.4 論文架構
第一章,概要的敘述該論文研究的動機以及目的,研究過程所使用 的方法和預期要達到的結果和目標。 第二章,說明壓縮感知相關的背景知識,壓縮和重建的規則以及現 有文獻的方法和對於壓縮資訊的保護方式也有背景知識的介紹。亦 討論透過聯合高斯密度函數所引導出的多重描述轉換編碼的觀念, 運用於保護技術的想法。 第三章,討論保護技術運用各個參數針對同一傳輸數據保護的優劣 程度,以及如何運用資訊的處理改善保護重建的品質。 第四章,針對保護技術參數數學上推論的兩種最佳參數設定情況與 第三章探討的資料處理方法互相運用,和壓縮感知壓縮數據非平衡 保護的運用,以及單通道、雙通道,各種保護技巧的結果討論。 第五章,探討研究的數據在未來上的應用,並試著點出基於此次的 研究結果之後的研究方向,希望可以將壓縮感知這新型的壓縮知識 運用於現代的通訊架構上。5
第二章
壓縮感知與壓縮數據保護的背景與討論
2.1 壓縮感知簡介
壓縮感知(Compressed Sensing)[1,2],又稱為 Compressive sampling,為一種 全新型態的資料壓縮處理方法,壓縮的想法源自於概念化(conceptual)的,壓縮資 訊的不足部分可以透過過去被忽略的資訊加以重建;比如受雜訊干擾的資訊。訊 號於取樣時候就可以透過數學上的演算判別重建原來資料的可能性,故取樣和壓 縮可以同時完成與感測器的設計功能上,使得壓縮的產品可以縮小體積。壓縮感 知的壓縮數據主要基於線性代數欠定組系統以統計最佳化的方式得到最佳近似 於原來資料的結果(solution),因此,對於近年來當代的工程、統計與數學提供另 一觀點研究上的合作,其觀念的適用範圍也因此相當廣泛,包含了訊號共振分析、 影像科學和資訊處理…等領域的研究。在數學的定義上,壓縮的觀念主要基於以 下兩點準則: Sparse Incoherent Sampling 因此,針對一筆資料的取樣上,不在限制於耐奎斯取樣(Nyquist rate)準則,而是 針對以上兩個準則對資料做取樣,此意味著壓縮感知在取樣的技術上可以以少數 有效的擷取數據,進而達到壓縮的效果。 以下,有一資料訊號可以表示為
n i i i x t f 1 ) ( (2.1) 為了方便表示(2.1)式起見,一般習慣將之表示為6
x
t
f
(
)
(2.2) nxn iR ,x 為係數, i xi f(t),i ,i為正交集合,例如快速傅立葉轉換 (FFT) , 離散餘弦轉換(DCT) , 快速小波轉換(FWT)…等轉換編碼,i為其行向量, j i j i , 。而壓縮感知試圖設計一個感知矩陣(Sensing matrix),可以擷取 中最具代表資料的資訊,令為感知矩陣。Ax
x
y
(2.3) 其中, mxn mxn mxn R A R R y , , ,A稱為 Measurement Matrix ,透過(2.3)可以 發現到壓縮感知是透過將高維度(High Dimension)的資料壓縮到低維度(Low Dimension)資料的技術。2.2 壓縮與重建的觀念與方法
在數學的推導上,當資料符合稀疏性(Sparse)與不連貫性(Incoherent )取樣樣 本(Sample),則確認此筆資料是稀疏化(sparse)或稱為可壓縮的(compressible)。根 據(2.3)式,y
Ax
,
A
R
mxn,當 y 壓縮於 m 維度的過程,稱為 Synthesis。[3] Source Data Coefficient Transformer Sparsity and Incoherence Compressed Data 圖 2-1 壓縮感知編碼流程圖 Compressed Data Analysis Convex Optimization Reconstruction 圖 2-2 壓縮感知重建流程圖7
圖 2-1 為壓縮感知重建的標準方法流程,由(2.1)式觀察可發現為一個 m x n 的數學矩陣表示式。Analysis 步驟是將壓縮數據(compressed data)初步透過線性代 數分析分析無窮解的最佳化的解。由維度定理
rank(
A
)
nullity(
A
)
n
可發現原 始資料 x 是由n
-
nullity (
A
)
個坐標軸所延展(span)生成,我們也知道(A)
nullity
-n
並無法映成(onto)於原始資料並了解到 A 的值域將座落在R(AT), 在此空間中勢必有一個最接近 x 的解為最小解(minimal solution),Daubechiest 所提出的 MOF(Method of Frame)[3]確定 Analysis 的值。MOF 的方式為以 2-norm 長度評估 Analysis 最接近資料的結果為 Ax y x subjectto min 2 (2.4) 則依據線性代數最小解答(minimal solution) y AA A x *( *)1 (2.5) 由於原始資料結構以及壓縮感知在運用上的不同,Analysis 分為多種方式。以達 到最有利的重建效果.例如由 S. Mallet 和 Z. Zhang 所提出的 MP(Match Pursuit) 或是 Best Orthogonal Pursuit (BOB)[3]。亦有使用直接將壓縮數據取得所對應於y A x A R( T),ˆ * 延展空間的值,以加快運算的速度。 我們已經知道, m R ) R(AT ,必須要使用最佳化理論統計估算原來資料 (Source data)的數值,本實驗最佳化的演算法方式為 Basis Pursuit (BP),BP 為數 學上最佳化技巧的一種方式,然而實踐的方法隨著研究觀點有多種的方法,對於 運用於壓縮感知的重建中的凸函數最佳化(Convex Optimization)的步驟上其優異 也隨著重建資料的不同也有所差異。
利用牛頓運算子的方法尋找函數的最小位置;即 f '(x)0;時常被使用的一 個技巧.主要是用來解決以下問題:
8
R
x
x
f
f
(
)
subject
to
min
(2.6) 在壓縮感知的凸函數最佳化的運用上,使用泰勒級數的觀念來收尋函數的最 佳化的結果時候,我們方法在實作上將會忽略泰勒級數的高階項;即 2 次方以上 的項。以泰勒級數尋找凸函數最佳化的演算法有多種的方式,我們使用的方法是 重新以 Primal-dual Method 的方式規劃 LPs(Linear Programming)並利用Log-barrier 演算 SOCP(Second Order Cone Programs).
Primal-dual method 或稱為 PD 是將函數線性規劃(Linear program)的一個技 巧[6]-[9],以利於演算法上的處理.主要的技巧觀念規畫建構一個可以重原點開 始積分的函數;可積分函數;並且設計一個相關的函數來決定其結果。
此建構的從原點可積分函數為:Primal Leaner Programming 另一個相關函數就稱為: Dual Leaner Programming
標準線性規劃限制為: x c x , min 0 SubjecttoA0x y, fi(x)0 (2.7) 壓縮感知的重建應用上, i i i mxn n m d x c x f R A R x R y , , 0 , ( ) , KKT (Karush-Kuhn-Tucker conditions)[6,9],滿足其條件為由(2.7)方程式可以觀察 到壓縮感知利用 KKT 所需要的條件,來統計與重建原來資料.接下來規劃出 Primal functional 和 Dual functional,符合線性規劃(LP)進而利用運算子設計出其 演算法。
前敘述提到,以 Primal-dual method 做線性規劃需要找出系統可以從原點積分方 程式作為 primal function,並設計可以決定其結果的 dual function。
其中的 *f (x*)0
i i
方程式是 complementary slackness condition[9],其中的 τ 式牛 頓運算子(Newton Iterations),可以進一步表示為 ) ( 1 k i k if z r [6]。透過定義此一互 補條件系統將會限制(bound)於範圍內(barrier),最佳化的目標為 0 ) v, v x, (x r ,可以以以泰勒級數的觀念展開,我可以得到:
9
y x A f c v A c r r i i T 0 * * 0 0 1 ) 1 ( ) v, , (x ) v, v x, (x (2.8a)
y x A f c v A c v x A F C C A v x v x i i T T T r 0 * * 0 0 0 0 1 ) 1 ( 0 0 0 0 ) , , ( J (2.8b) 由(2.8b)可以得到: 1 1 ) 1 ( F C z f (2.8c) 重新整理可以得到系統核心方程式: x b v f C c v x C T T 0 T 0 1 0 0 0 1 T A A ) 1 ( 0 A A F C (2.9)根據 Emmanuel Candes 和 Justin Romberg 所提出的最佳化方法,主要是將(2.9) 式泰勒級數展開式的方式表示出數學方程式[6,9]。如此的話,當系統是可最佳化 的時候,可以使用 log- barrier 的技術實施演算法以實踐牛頓運算子(Newton iterator)的方法完成最佳化程序。 由 2.7 式標準線性表示式,當一個函數 fi(xk)是否為線性(LP)的判定方法,是 由λk >0 且 fi(xk)<0,設 F={f1,f2,…,fm},F 集合為符合線性判定的條件,集合中的 函數應設計為線性表示: i i x d c , fi (2.10a) 或者是: ) ) , ( ( 2 1 ) ( fi x Aix 22 ci x di 2 (2.10b) 我們可以重寫(2.10a)和(2.10b)式使它成為 log-barrier 形式的線性標準表式式:
10 0 ) ( , to subject )) ( log( 1 , min 0
0 i k i i k z c x f x A x y f x (2.11)
i i k f x x c x f0( ) 0, 1 log( ( )) 就是為一個二次凸函數 Second-Order ConePrograms (SOCP),利用梯 g(x)矩陣以及 Hessian 矩陣 H(x)表示泰勒級數為:
x x H x g x x x f x x , 2 1 , ) ( 0 (2.12) 總結 2.2 節所討論,壓縮感知壓縮數據的重建方法是透過(2.8c)式 KKT primal-dual 設計出 F 集合,其中的功能函數(functional)符合 λk >0 且 fi(xk)<0,它將符合(2.11) 式在限制條件下符合 log-barrier 二次凸函數,進而可以利用牛頓運算子(Newton Iterations)運算凸函數最佳點[6]。
(a) Min-L1 with equality constraints P1
P1 x Ax y
x 1 subjectto 0
min (2.13a)
(b) Min-L1 error approximation PA
PA y Ax Ax y
x 1 subjectto 0
min (2.13b)
(c) Min-L1 with quadratic constraints
P2 x subjectto Axb
x 1 0
min (2.13c)
(d) Min-L1 with bounded residual correlation
PD ) ( A min x1 subjectto * A0x b x (2.13d)
(e) Min-Tv with equality constraints
TV1 Ax y
x TV(x) subjectto 0
min (2.13e)
(f) Min-Tv with quadratic constraints
TV2 Axb x TV(x) subjectto 0 min (2.13f) (g) Dantzi TV TVD ) ( A to subject TV(x) min * A0x b x (2.13g)
11 Compressed Sensing y As Compressed Data Setting Log-Barrier Iteratioin If ii < lbtal End Min Energy X0=inverse(A*(AA*))y KKT Primal-Dual Setting Back-Tracking loop Loop-backtracking Iteration >32 Lamda2/2<newtontol Or Niter >= newtonmax 圖 2-3 壓縮感知軟體程序流程圖 (2.13a)至(2.13g)式是 J. Romberg 所提出以 BP 數值演算法重建壓縮感知的原始資 訊的基礎方法。[6] 圖 2-3 是模擬壓縮感知的實作模擬程序,設定完成 Log-barrier 所需要的演 算參數;如 lbtal 表示 log-barrier 演算迭代的次數,若是 lbtal 的設定範圍內,則 開始執行所需要的演算。
於 Minimal Energy 的階段,即可得到系統的最小解,之後將以 KKT primal-dual condition 的技巧得到一個 SOCP 所需要的凸函數,執行 Newton-step Optimization,
12
持續監看 Loop-backtracking Iteration 迭代的設定次數和 Newton-step 的迴圈次數 和最佳解所設定的值,直到符合設定就完成程序。
2.3 多重描述轉換編碼簡介
多重描述(Multi Description)編碼的保護技巧並不需要對所要保護的數據資 料集(Compressed Data Set)的前置資料預估,是屬於無記憶(memoryless)形式的保 護編碼技術。主要的核心觀念為將欲傳輸的資料集(Data Set)經過適當的相關性 (Correlation)演算,使得資料集中遺失的資料可以預估原來的值,保護過後的多 重描述碼(Multi Description Code)累贅量很低,與錯誤更正碼依此比較的話效率 是比較高的。[13]
多重描述轉換編碼(Multiple Description Transform Coding)與 PCT(Pairwise Correlation Transformer)是利用多重描述(Multiple Description)的概念實施的保護 措施和以及利用此觀念架構傳輸硬體配置或保護資料受到太大損害.多重描述 [15]的技術想法由貝爾實驗室所思考出來用於解決當時語音電話系統中斷的問 題,主要觀念是當類比語音系統中斷的時候,系統如何運用片段的數據使的中斷 的資訊得以識別。
Multiple Description Correlation Coding algorithm X2 X1 Z1 Z2 圖 2-4 多重描述轉換編碼方塊圖 多重描述轉換編碼是將想要受保護的資訊適當的給與處理,V. K. Goyal 提出將 數據傳輸分為奇/偶部分[15],以聯合自然分布機率的觀念中的共變數矩陣演算 的方法規劃奇與偶所包含的集合數據彼此具有其相關性,如此可以如同多重描述
13 設計上的觀念,可以將片段數據有效運用。 圖 2-4 x1和 x2可以視為將數據集合分為奇/偶部分,奇/偶相互為 0 , 0 even odd m m 的關係,透過多重描述編碼(MDC)的演算之後,奇/偶 Z1,Z2 的多重描述數據將具有一個0的關係,因此當奇部分或者是偶部份發生錯誤, 都可以經過這一層關係重建.自然條件分布機率的指數項表示為: )} | ( exp{ * )} ( exp{ ) | ( * ) ( ) , ( 1 2 ) 1 ( 2 1 2 2 1 2 1 2 2 1 2 2 1 2 2 z z Q z Q z z f z f z z f z z (2.21a) 由(2.21a)式,透過
Q
(
x
|
y
)
可以討論如何有效的利用條件機率分布函數的共變異 數關係來規劃可以符合多重描述規範的訊源編碼,以保護萬一個編碼數據受到破 壞,系統可以透過另一數據的相關性片段重建,使得資料可以達到判別的程度, 不至於形成無法使用的情況。 2 1 2 2 2 ) 2 2 ( 1 1 1 2 2 1 2(1 ) ) ( ) 1 ( 2 1 2 1| ) exp{ ( z z z m z z z z m z z z Q (2.21b) 根據(2.21b)式可以了解到,當兩個變數具有其相關性質的時候,會有以下可以以 數學表示的意義。(2.21b)是的條件分布密度的期望值為:
|
( ) E 2 2 2 1 1 ) ( 2 1 z z z z m z m z z (2.22) 當(2.22)式 0, 0 2 1 z z m m 的條件成立的時候,則,
2 2 2 1 2 1 1 2 E | E zˆ z z z z z z (2.23) (2.23)式表示為當奇數部分的數據受到破壞,由z2重建z1的期望值.因此,可以 得知當ˆz1被重建的時候,與實際沒有受到破壞的會產生一個差值,定義為 1 1 ˆz z
,則
2 1 2 2 1 2 2 2 1 1 2 ( ˆ ) z E z z E z E z z E (2.24) 由(2.22)到(2.24)式規範了傳輸數據受到破壞之後透過相關性重建和量度的方法, 此意味著當透過多重描述編碼的數據在透過通道傳輸所受到的破壞可以重建的14 強度。 圖 2-4 中的方塊為一個線性運算的演算法,此意味著可以透(2.22)式到(2.24) 式的數據資訊可以透過線性反運算得到重建後的資料,我們假設線性運算子為 T, 透過(2.24)式與線性反運算可以得到: 0 ˆ 1 1 1 x T x (2.25) 如此即可以重建原始資料與重建資料的差值。透過上式,可以進一步規範原始資 料與重建資料的變異數D1。
2
1 1 1 ˆ 2 1 D E x x (2.26a) 同理若是偶數部分通道的重建為
2
2 2 2 ˆ 2 1 D E x x (2.26b) PCT 為利用多重描述轉換編碼的訊源編碼(Source Coding)期間的保護性線性 演算的概念架構一雙通道的傳輸架構。多重描述轉換編碼的觀念核心為設計一個 可表示圖 2-4 中的方塊(Multiple Description Correlation Coding Algorithm)的線性 運算矩陣 T,使得 d c b a T (2.27) 透過(2.27)式子當 X1,X2經過 T 矩陣運算之後,Z1,Z2會有一相關性,這一相關性 可以以相關係數表示,而介於-1 和 1 之間,在 PCT 的運用上給定一個參數 為
cos
,並且在 Z1,Z2為 0 期望值的共變數為: cos ] [ ) , ( C 1 2 1 2 2 1 z z z z E z z ov ,非相關矩陣可以定義為: 2 2 2 1 X X 0 0 R 2 1 x x (2.28a) 經過流程圖 2-2 的運算之後,相關性的數據可以以:15 2 2 Z Z 2 2 1 2 1 1 2 1 cos cos R z z z z z z (2.28b) (3.28a)式為一個對角矩陣,PCT 的技巧將設計一個 T 矩陣的 a ,b ,c 和 d 可以特徵 函數與特徵值表示的數學形式,使得 -1 X X Z Z TR T R 2 1 2 1 表示,當資料透過圖 2-4 的 T 矩陣(2.27)式編碼成傳輸的數據資料之後,其數據碼之間的相關性就可以透 過(3.28a)式 和 (3.28b)式計算出來,且可以透過(2.25)式子以線性反運算的方式 估算出原來資料的值進而達到資料保護的目的。 我們的實驗是將非常稀疏的壓縮資訊加上 Noiselet 雜訊之後的壓縮感知之壓 縮數據,於訊源編碼期間將準備傳輸的資料處理為具有相互關係性的資訊,在數 據受到不同程度破壞之後,可以達到重建之後的效果比較。 也將進一步比較同樣壓縮數據破壞程度下,透過 PCT 設定參數的規則改變 a ,b ,c 和 d 後可以得到重建效果優劣程度。 Source Encoder Compressive Sensing Odd 數據 Even 數據 相關性參考 original Source odd
X
evenX
odd Z evenZ
圖 2-5 數據 PCT 編碼相關性流程示意圖16
資料序列可以 Source 經過 Source Encoder Compressive Sampling 編碼的數據, 並將數據分為奇與偶部分,透過(2.27)式的多重描述轉換編碼矩陣運算我們可以 得到(2.28a)式和(2.28b)式的共變數矩陣的相關性量度.進一步的透過(2.26a)和 (2.26b)式估算出重建後的值。
2.4 模擬方法與變數說明
我們以 N1個離散餘弦轉換作為傳輸的壓縮數據並以 N2個 Noiselet 做為其雜 訊的干擾,我們將設計一個隨機破壞的雜訊;此雜訊的形式將不同於 Noiselet 所產生的干擾效果;再次透過壓縮感知重建並觀察其變化,並且分別探討雙通道 與單通道兩種方法,以改善壓縮感知遭遇此隨機雜訊破壞之後的解決方式。 PSNR (Peak Signal-Noise-Radio) 最大功率與因為受雜訊干擾而衰減的功率比值[39]。
11 0 1 0 2 2 MSE 255 log 10 PSNR )) , ( ) , ( ( 1 MSE M i N j j i y j i x MN (2.29) SSIM(Structural Similarity) 以主觀視覺辨識的結構相似度量度方法[38]。 下式為相似度量測(similarity measurement) 公式 )) , ( ), , ( ), , ( ( ) , (x y f l x y c x y s x y S (2.30) 其中 , 1 2 2 1 2 ) , ( C C y x y x y x l , 2 2 2 2 2 ) , ( C C y x y x y x c , 3 3 ) , ( C C y x xy y x s 則 SSIM 可表示為: )] , ( [ )] , [( )] , ( [ ) , ( SSIM x y l x y c x y s x y (2.31) 變數的使用 1. N1: 離散餘弦轉換係數個數 2. N2: Noiselet 係數個數 3. n: 錯誤更正碼 BCH 傳輸長度 4. k: 錯誤更正碼 BCH 編碼長度17 5. RG: 紅色色頻 6. GR: 綠色色頻 7. BL: 藍色色頻 我們模擬的方法主要是以在壓縮感知的壓縮數據中,使用離散餘弦轉換作為 稀疏訊號,並且以 Noiselet 作為不連貫訊號。以上的做法可以了解到壓縮感 知如何透過不連貫訊號的雜訊重建稀疏訊號,壓縮感知的重建方法可以將原始 影像回復到一定的品質。 由圖 2-6 可以發現到隨著稀疏性訊號的壓縮率變小,且不連貫性的雜訊固定 的話,則重建的品質越高;由圖 2-7 可以發現,稀疏性訊號我們只有 10 個係 數,壓縮感知將透過不連貫訊號的雜訊資訊重建,我們可以發現當不連貫訊號 所可以用的資訊越多,重建的品質將更好。我們由以上的討論所得的結論是: 壓縮感知於接收端所得到的雜訊其可用的資訊越多,則壓縮感知演算法可以將 其填補稀疏訊號重建的不足,進而達到重建品質提升的效果。其模擬方法將以 此為標準工具,認為當接收端接收到含有隨機中斷的雜訊訊號,壓縮感知演算 法並無法使用其中的雜訊資訊而使得整個的壓縮感知重建品質變差。由初步的 實驗數據證實的這個觀點,透過圖 2-8,我們可以發現當具有隨機中斷訊號的 干擾之後;其強度為 5%,10%,15%和 20%的時候,重建的結果品質隨之遞減。 我們的模擬方法是,將額外的隨機中斷訊號加入其中,設定的隨機破壞強度 為 1%到 25%,並且以上述的方式衡量並且記錄影像輸出的品質,可以預測由於 壓縮感知並無法對隨機中斷訊號所產生的雜訊透過統計重建的觀念克服,因此, 重建的影像品質將會隨著破壞的強度增大而減少。
18 (a)N1: 2000 , N2: 20000 PSNR: 39.51 dB SSIM: 0.95 (b)N1: 6000, N2: 20000 PSNR: 37.76 dB SSIM: 0.92 (c)N1: 11000 , N2: 20000 PSNR: 39.51 dB SSIM: 0.95 (d)N1: 16000 , N2: 20000 PSNR: 41.58 dB SSIM: 0.96 圖 2-6 增加稀疏性訊號 接下來,我們將提出多種保護方法,對壓縮資訊提供必要的保護演算編碼, 並且分析保護參數與壓縮感知數據之間的關係,以增加保護效果。我們預估受 過保護編碼數據的壓縮感知之壓縮數據在重建之後會比未受保護的數據要好, 如此則達到排除壓縮感知無法克服的非不連貫雜訊干擾的目的,使得壓縮感知 遇到如此類雜訊可以更穩定的利用統計重建的方式達到應有的重建品質。 (a)N1: 10 , N2: 1000 PSNR: 30.10 dB SSIM: 0.55 (b)N1: 10 , N2: 6000 PSNR: 32.25 dB SSIM: 0.71 圖 2-7 增加不連貫性雜訊訊號
19 (c)N1: 10 , N2: 11000 PSNR: 33.34 dB SSIM: 0.78 (d)N1: 10 , N2: 16000 PSNR: 34.49 dB SSIM: 0.84 圖 2-7 增加不連貫性雜訊訊號(續) (a)N1: 1000 , N2: 20100 PSNR: 28.81 dB SSIM: 0.29 (b)N1: 1000, N2: 20100 PSNR: 38.47 dB SSIM: 0.22 (c)N1: 1000 , N2: 20100 PSNR: 28.28 dB SSIM: 0.17 (d)N1: 16000 , N2: 20000 PSNR: 28.22 dB SSIM: 0.15 圖 2-8 隨機中斷雜訊干擾
20
第三章
數據資料的保護方法
3.1 單通道傳輸與雙通道傳輸
資料經過訊源編碼的技術之後再加以載波調變之後,透過通道傳輸.儘管當 代通訊技術大概都可以將數位錯誤率控制在百萬分之一,但各種的干擾因數,如 通道丟失的雜訊,會使得經過傳輸的數據在接收端與傳輸端有所出入,解碼的過 程會因為受到雜訊干擾數據的錯誤而無法重建出原來的資料。若是以圖 3-1 的架 構傳輸數據,解碼端無任何資訊可以重建受干擾因數而與訊源有出入的數據,使 得數據解碼之後無法有效的判讀;即個片段資訊的相關性為 0。壓縮感知於通道 無丟失的情況之下,稀疏且受干擾的數據可以透過數值演算法重建。圖 3-1(a) 與圖 3-1(b)為壓縮感知以數值演算法方法重建的前後結果。 (a) y A xm * (b) b x A x TV(x) subjectto 0 min 圖 3-1 壓縮感知重建21 Source Source Encoder Noisy Channel Source Decoder Output 圖 3-2 單通道傳輸流程圖 若數據通道以多重描述的雙通道(Split Channels)架構傳輸[15],利用此架 構的通道傳輸在訊源編碼完成之後的數據會再使用多重描述轉換編碼的編碼方 式實施對偶資料(pair data)的相關性配置。如此一來,受干擾破壞的壓縮感知 數據將會有相關性的依據重建出與訊源出入相對較小的資料,以利判讀。
多重描述碼(Multiple Description Code)的正向轉換矩陣(forward transform)T 的a,b,c 和 d 參數(2.27)式,在此的設定方式將使用 PCT 所規劃 的參數設定。 Source Source Encoder Noisy Channel 2 Source Decoder Output PCT Matrix PCT Matrix of Inverse A B C D Aˆ Bˆ 重建數據區塊 訊源編碼區塊 Noisy Channel 1 圖 3-3 雙通道傳輸流程圖
22 1 1 1 1 2 2 2 2 sin cos sin sin T r r r r d c b a (3.1) 透過(3.1)式子,我們藉由調整r1,r2,
1和
2控制各項多重描述碼所需的結果。跟 據第二章的討論,圖 3-2 的表示方式將以雙通道系統的圖 3-3 表示,如此即達到 Split Channel 傳輸環境。由 3.1 式了解到此式為正交矩陣,如此的話可由線性 代數特徵值系統表示為 T AB CD TR T R 。由為雙通道傳輸架構概念,成對傳輸數據(pair data)在 Source Encoder 階段被規劃出來。A={A1,A2,…, An/2}, B={B1,B2,…, Bn/2},由 2.4 節討論的觀念,AB 通道可以透過(3.1)式形成互有相 關的數據,其相關聯的數據集合分別為 C={C1,C2,…, Cn/2},D={D1,D2,…, Dn/2}. 故
B A sin cos sin sin B A V V D C 1 1 1 1 2 2 2 2 2 1 r r r r (3.2a) 且得出的相關性為: 2 B 2 A 1 2 2 1 1 2 1 2 2 2 2 2 2 2 2 2 2 D 2 C sin cos sin sin r r r r (3.2b) 多重描述轉換運用於 PCT 傳輸保護上其所需的參數有其定義上的限制,透過這些 定義,我們將模擬壓縮感知的壓縮數據應用於 PCT 上的結果。 這些定義分別為:0 ≤ 𝜃1 ≤𝜋 2,0 < 𝜃1 − 𝜃2 = Δ𝜃 <𝜋, r1r20, sin 1 1 r2 r ,以 上定義了 V1和 V2兩個 T 矩陣基底向量的長度和可以設定的角度。 在共變數矩陣的相關性定義上,r =𝜎𝐴 𝜎𝐵,σ𝐴 ≥ σ𝐵 sinϕ = σ𝐶σ𝐷 σ𝐴σ𝐵,透過 2.3 節 MDTC 相關性的探討,可以得到以下表示式: 2 B 2 A AB 0 0 R (3.2c)23 2 D D C D C 2 C CD σ cos σ σ cos σ σ σ R (3.2d) 以上,透過(3.2a)、(3.2b)、(3.2c)和(3.2d)以及 2.3 節的討論,當 D 集合中有 一元素受到雜訊通道(Noisy Channel)的干擾而破壞的時候,由線性反運算我們 可以得到一個可靠的預估,盡可能地降低資料遺失所形成的損壞。 ) ~ ( ˆ T ˆ ˆ 1 C D C B A (3.3a) 𝐷̂(𝐶̃) 是估算的方程式,只當數據集合 D 的元素可用 C 元素重建的值。 C C Dˆ(~) cos ~ C D (3.3b) 反之亦然,可以用 D 元素重建被破壞 C 元素的值.再由 2.4 節的 2.24 式可以得 出重建預估值與實際值的差值,此值當越小越好,降低資料遺失的策略將越成 功。
2 2 D 2 sin ) C~ ( Dˆ D E (3.4) 由 2.26a 和 2.26b 式,我們亦可以利用這兩式的觀念估算重建後與實際數據值的 差異量,
2 2 2 2 1 2 qc 2 2 ) C~ ( Dˆ D E C~ | ) Bˆ B ( ) Aˆ A ( r r E - -
(3.5) 與變異數量度。
(A Aˆ) (B Bˆ) |C~
(A Aˆ) (B Bˆ) |D~
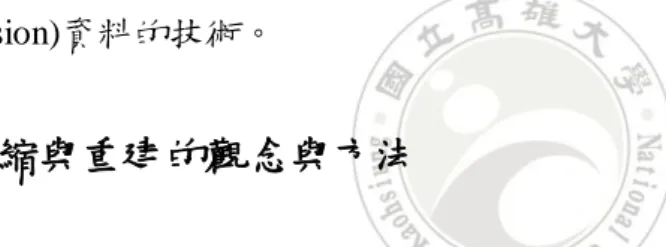
) ( 4 1 2 2 2 2 1 E - - E - - D (3.6) 由 PCT 所定義的參數設定範圍,將探討一組分離通道(split Channel)的不 相關數據如何根據參數的設定規則演算之後的保護程度會較佳。由圖 3-4 與圖 3-5 的模擬可以發現,同一組資料集經過不同的參數設定,我們以固定1,變動
2 的方法,以 PSNR 和 SSIM 觀察重建之後的品質。清楚的可以發現到參數設定與重 建之後的品質有很大的關係。24
圖 3-4 θ1和θ2 PSNR 重建品質趨勢圖
25
3.2 資料保護策略
圖 3-4 以及圖 3-5 的輔助,結果可以發現當θ1和θ1相差較小的時候,重建 品質較不如預期。而且當愈受保護的數據為同號的時候,技巧上可以將θ1和θ1 設定於第一象限內;若是不同號,則θ1和θ1分別設定於第一與第二象限;這樣 的話保護將具有較佳的結果。 而壓縮感知的壓縮數據稀疏部分是以離散餘弦轉換所取得的係數,所以愈受 保護的數據並不全然為同號或者是異號,因此,使用 PCT 的時候在保護處理的效 率上,需要對原來資料做一番規劃,保護上才可更有效率。在壓縮感知技術的運 用中,以像素作為其原始數據的觀念為空間域(space domain)的運用。此方法在 觀點上為直接將影像的空間域的資訊的方式分為對偶資訊,此法等價於影像資訊 在無壓縮的情形之下,其傳輸的數據是影像的像素(pixel),一般 8 bits 灰階 值定義於 0 到 255 數值之間,重建值亦介於 0 到 255 之間,因此以圖 3-5 的方法 傳輸與重建的 PCT 參數數值應該設計使得重建值能夠介於 0 到 255 之間,方可得 到最大重建品質。由於整個原始資料都屬同號性質,我們可以將θ1和θ1設定於 第一象限內,則預估可以得到比較好的重建品質。奇數集合 A 的長度為2L,定義 為 LA,偶數集合 B 的長度亦為 2 L,定義為 LB,同樣長度的 C 集合與 D 集合為預備傳 輸的傳輸數據。 不同上述所介紹的方法,此方法會將壓縮感知的壓縮數據以 PCT 保護,由於其數據是否同號難以預估,引此可能要實施比較複雜的不對等保護; 要有多個 PCT 參數設定以保護不同的對偶資料(pair data);才可以比較佳的重 建結果。總結的討論 PCT 運用於壓縮感知的壓縮數據的困難在於,PCT 的參數設 定並無法設定一組參數就可以適用於所有的對偶資訊,因為無法預估對偶資訊的 正負號的出現。我們提議了一個在訊源編碼階段可以加以規範的方法, A={A1,A2,…, Am}、B={B1,B2,…, Bm},我們盡量將原始資料想要編碼的 A1和 B1、 A2和 B2…Am和 Bm的值盡量接近,這樣的話,當執行壓縮感知之後所代表原始資料26 (a)Pixel Lossy 10% PSNR: 34.38dB SSIM: 0.38 (b)P-ES 13 66 PSNR: 41.56 dB SSIM: 0.72 (c)CS Lossy 10% PSNR: 28.19 dB SSIM: 0.20 (d)C-ES 1366 PSNR: 28.13 dB SSIM: 0.25 (e)CS Lossy 10% PSNR: 28.19 dB SSIM: 0.20 (f)P-C-ES 13 66 PSNR: 30.66 dB SSIM: 0.52 圖 3-6 PCT 重建比較 A 和 B 的壓縮數據也會較為靠近,使得我們可以推估 A 和 B 中的元素可以同 號而使用如前介紹的方法,可以將其1和
2規範於第一象限,雙雙成對的變異量 大概相同,因此系統可以以此單一個參數就可以有比較好的重建效果。不同於直 接使用空間域之像素分離的方法在於:使用離散餘弦轉換與 Noiselet 可以使的 壓縮感知的壓縮數據資訊同時具備稀疏性和不連貫性的特性之外,同時也具有傳 統能量較集中於單一頻點,可以對數據更進一步的使用不對等集中重點的保護。 而現代的系統,其壓縮數據都必須經過壓縮處理,若是僅以空間域之像素做為資27 料的儲存依據,傳輸量將過於龐大,而第三種方式將有利於壓縮上的處理。由以 上的特性,我們可以預測此方法重建的效果比係數分離的方式還要好。 討論圖 3-6 影像輸出,其 PCT 的角度參數都設定為
1
3
6
6,並以三種 不同的資料處理方式討論重建的好處與壞處,可以看到第一列僅利用影像的灰階 值保護,重建效果是不錯的,符合上述討論,而第二列則因為無法預估壓縮感知 的壓縮數據對偶之料是否同號,導致於僅與
1
3
2
6 一個參數無法有效的達 到重建的效果而之後的第三列則是將壓縮感知壓縮數據對偶資料盡量相近,則可 以模擬第一列的情況,則可以看到其重建效果比第二列的品質較好。 由上述的理由以及圖 3-16 的結果,就以影像處理的資訊內容討論,於圖 3-3 的訊源編碼區塊中,AB 的對偶資訊我們分為三種方式處理,分別為像素分離 (Pixel Element Split)、系數分離(Coefficient Element Split)和像素-係數 分離(Pixel-Coefficient Element)三種方法。 其中的像素分離和系數分離的方法其優劣和特性如之前所述,比較具有處理 效率與較佳的重建品質是使用像素-係數分離的方法。此方法為子取樣的運用, 主要的核心觀念為擷取灰階值較為相近的作為 AB 對偶資料,這樣的話 AB 的資料 將會具有像素分離的優點,當 AB 對偶資訊集合取轉換係數的時候,其資料具有 像素分離的優點外,也將會具有系數分離的優點;也就是壓縮數據對偶資料具有 像素分離接近且同號的特性,使的系統的 PCT 參數比較好設定而達到重建較為穩 定的目的。28
第四章
數據資料傳輸的模擬結果與討論
4.1 PCT 行為模擬
根據第二章的探討,多重描述轉換編碼之 4-by-4 正向轉換矩陣 T 之 a、b、c 和 d 元素透過設計可以得到相對應的相關係數ρ,而當多重描述轉換編碼的元素以 (3.1)式表示的時候,則數據之間的相關性將可以以共變數矩陣(3.2c)和(3.2d) 表示之。更進一步計算,PCT 可以有 2 種最好的參數選取點,我們也將依序探討 壓縮感知數據是否依然可以遵循 PCT 的最好的參數選取設定準則。 參數選取的條件[14],當 2 1 2 sin 1 2 1r r ,則
2
1為 PCT 的第一種最好參數選 取設定角度,當此條件成立之後,則D1,0, 22B optimal 。當r1r2 1,且
1
2, 2 2 1 ,而第二種最好參數選取設定條件
2
1,我們可以再次得到正交 所得到的最佳參數為:D
1,0,min, 2 2 22 B B A B A orth
。 由第二章與第三章我們依序討論了多重描述轉換編碼利用高斯條件機率函 數之平均值項的觀念所發展出的 PCT 雙通道傳輸架構,運用於壓縮感知之壓縮數 據;需同時具備稀疏性與不連貫性資訊的數據;當受到破壞之後重建的結果。並 且利用前置的處理程序,推測當以 PCT 雙通道做保護的時候,成對數據相差越近 則在系統上參數的設定上比較可以控制其品質。 於第三章我們探討 PCT 的 6 個設定參數於限制條件內且趨近於最佳參數設定 點的值來設定參數時候,壓縮感知位於重建影像的品質,是否有最大的重建品質 效果。我們將使用上述最好的參數選取設定點帶入的 PCT 設定係數,並且以1 3 ,29 4 1 和16 ,並持續步階變動
2的角度,直到
2
1為止,過程中符合r1r2,
1 2 0 的準則,對此紀錄並繪出曲線利於觀察與分析。 第三章的圖 3-4 和圖 3-5 中,當16 的時候,θ2從14變動到 3 1 ,根據 PCT 的最好的選取點推導[14],
2
1和
2
1的角度 PSNR 分別為 26.7dB 和 27.1dB,結構相似度的衡量為 0.14 和 0.32。14 的時候,且24得時候, 我們得到了 29.56 dB,SSIM 為 0.61,此一參數設定可以發現同時為
2
1和 1 2
的參數設定情況。由曲線的趨勢,可以得到最大的重建點位於24無 誤。再由13,
2
1和
2
1的角度分別為 29.58dB 與 29.56dB,SSIM 為 0.62 和 0.64。 由以上可以發現,16 的時候,
2
1最佳參數點的條件優於
2
1的 條件。進一步探討14 以及13的時候,可以發現
2的角度設定變化與重建 的品質變化較大,這表示當資料處理使用之前所討論的係數分離的方法時候,
2 在實驗上的結果大都已過了第二項限後的重建品質較佳;即
1
2
且
2 0的 範圍;會有比較好的重建品質。我們也發現由於14 時候,位於第二項限2同 時符合 2 個最佳參數條件,故系統的最佳重建值即24。13的時候,2 個 最佳參數點條件之間的角度變化趨於平緩,大概遊走於最佳重建值 29.58dB 左右, 最好參數選取點條件
2
1依然優於
2
1的條件,近一步的可以發現到,當2 所設定的角度較大的時候,其重建的品質優於1設定於角度較小的值。近一步結 論,當2 14 的時候,PCT 參數的設定在重建上有較佳的效果.我們亦可以 看到當14 ,且當24的時候,此時參數符合
2
1,亦符合
2
1的條30 件。而4 10的時候,雖然符合最佳參數點的預估,不過重建品質無法改善 太多。 如之前所敘述,壓縮感知的壓縮數據是 N1離散餘弦轉換係數個數與 N2的 Noiselet 系數各數聯集而成,完全重建的品質 PSNR 為 32 dB,當壓縮資訊有 10% 的破壞之後,壓縮感知重建品質 PSNR 為 28 dB ,SSIM 為 0.21。 對照之下可以發現到壓縮感知的壓縮數據與 PCT 最佳參數推導後的數據理 論大致吻合。Primal-Dual KKT Condition 解 SOCP 的壓縮感知重建方法可以利 用 PCT 傳輸架構保護因通道丟失中斷雜訊並遵循其理論上的最佳參數點是可行 的。可就以 PSNR 分析而言,實施重建的過程有時無法有效的達到效果,尤其是 當 PCT 參數設定無法與系統想要保護的壓縮數據匹配的時候。當只有觀察在最佳 參數點設定的 PCT 保護重建系數的時候,與破壞之後未重建相比,PSNR 改善平 均大約 1.5dB。就以 SSIM 分析,當1與2為垂直的時候可以上升約 20%。
4.2 PCT 最佳選取參數重建品質趨勢曲線
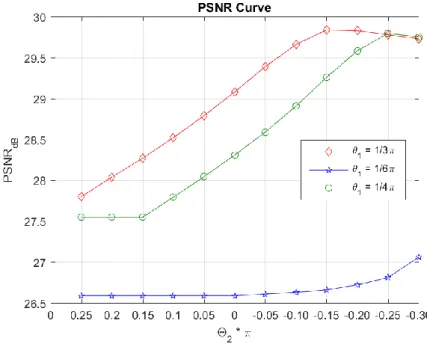
透過 4.1 節的分析圖 3-4 和圖 3-5 的最好選取參數點,我們得知壓縮感知之 壓縮數據可以以 PCT 最佳的參數設定使系統重建的品質得以得到最佳。而之前是 以破壞程度固定為 10%的已破壞數據,調整2並觀察重建後品質的趨勢。此作法 看出的結果忽略一個問題為:無法了解到隨機破壞的參數其破壞的程度與重建品 質之間的關係與趨勢。由於壓縮感知的數據的中具有離散餘弦轉換的數據因數, 因此當破壞程度到達某一定的量時候可能有很高的機率會讓表示高能量的係數 毀損,而導致在重建品質尚無法達到有效預估的程度。31 我們的方法將透過 4.1 的討論中,1與2的數值固定於最佳參數所推導的結 果,以軟體模擬持續變動其破壞的程度,由 1%到 25%。並記錄各個破壞與重建後 的結果。 圖 4-1 C_ES PCT 保護重建 PSNR 曲線 圖 4-2 C_ES PCT 保護重建 SSIM 曲線
32 圖 4-1 與圖 4-2 以破壞程度 1%到 25%統計出曲線圖,各最佳的角度如預期的 可以改善破壞之後的壓縮感知重建數據。由 Lossy 的曲線可以發現,壓縮感知對 於 Noiselet 的訊利用數值演算法無法處理隨機中斷訊號的雜訊,而我們採用 PCT 的最佳的參數設定保護可以改善重建品質平均約 2 dB。詳細分析結果曲線;PCT 第一類最好的參數選取角度
2
1的角度為13 2 3 、 6 2 6 1 和 4 2 4 1 ,第二類最好參數選取角度 1 2
的角度為13 2 6 、 3 2 6 1 和 4 2 4 1 ,這裡可以發現,除了 3 2 3 1 的設定之外, 重建之後無論以 PSNR 或者是以 SSIM 觀察,重建之後的品質大概少於其他最佳的 設定參數約 1 dB 左右,所以當 PCT 使用在壓縮感知數據上保護無論1和2是否 處於最佳參數的設定,亦符合之前所討論的當1和2相差越小,則重建效果越 差。 從曲線可以發現,當隨機破壞程度到達約 18%的時候,壓縮感知的數據發生 的破壞使得品質急遽下降,我們可以重 PCT 的保護結果上,我們就可以輕易的發 現到,相差角度越小的重建的效率越差,反之,當13 2 3 得時候,可以 得到相對比較好的重建結果。當隨機破壞程度到達了 22%以上則 PCT 的保護就無 法達到有效的品質。 圖 4-3 是以 10%通道丟失之後隨機雜訊的重建輸出,重建之後的品質 PSNR 都位於 29 dB 左右,而可以注意到的是,相差角度較小的重建的品質較差。33 (a)Lossy 10% PSNR: 28.42dB SSIM: 0.22 (b)θ1= π/4 θ2=-π/4 PSNR: 29.81dB SSIM: 0.62 (e)θ1= π/4 θ2=-π/4 PSNR: 29.81dB SSIM: 0.62 (c) θ1=π/3 θ2=-π/6 PSNR: 29.88dB SSIM: 0.62 (f)θ1= π/3 θ2=-π/3 PSNR: 30.20dB SSIM: 0.71 (d) θ1=π/6θ2=-π/3 PSNR: 29.76 dB SSIM: 0.62 (g)θ1=π/6 θ2=-π/6 PSNR: 28.92dB SSIM: 0.45 圖 4-3 10% Lossy C_ES PCT 保護重建輸出影像
34
4.3 影像資訊非均勻保護與 PCT 變異數
在本次的實驗過程中,破壞程度於 18%的時候已經沒有辦法在重建到一定的 品質,此種迅速破壞的原因在於隨機破壞的數據對於高能量權重部分之值產生破 壞,使得在重建的時候其所選的 PCT 參數數據無法有效的對此數據回復到可以達 到所要求的品質,故我們在圖 3-3 所示於訊源編碼區塊配對壓縮數據之後,對於 代表性的數據歸納出一定的 PCT 參數做保護,如此做法可以更有效率的維護重建 之後的品質。 我們於圖 3-1 中的 Noise Channel 的模擬中,企圖將重要的壓縮感知係數 數據通過高的破壞通道,可以輕易的模擬如圖 4-1 和圖 4-2 中的於破壞重度到達 18%的時候所產生的現象。 接下來依據第三章所述,對於 PCT 保護傳輸架構而言,由於在系統以係數分 離的方式大都無法以單一參數即可有效的重建每一個受破壞的係數,也因此訊源 編碼步驟分析原始影像的資訊變得重要,在壓縮感知中的高能量係數在被破壞之 後其設定的參數無法有效地將之復原;或許可能復原大部分的係數;不過由於其 他係數對於影像的代表性能量較低,這形成重建的效果不達預期。故此,我們的 方法即針對與離散餘弦轉換係數中的直流係數配對的保護數據規定特別的參數 作保護,使它在受到破壞之後重建不至於離所期望的品質過大。 我們實驗的方法為在於訊源編碼區塊配對壓縮數據之後,對於代表性的數據 歸納一定的 PCT 參數做保護,如此做法可以更有效率的維護重建之後的品質。於 圖 3-3 的編碼區塊中,特別針對相關離散餘弦係數的 DC 項以及其相關係數做特 定的 PCT 參數設定,以離散餘弦轉換係數的 DC 項為例。 我們的方式即是根據原影像資訊設計出適當的 PCT 參數,特別保護代表性的數據 以達到預防之前所探討品質急遽下降而無法重建的問題。35 圖 4-4 離散餘弦係數之 DC 數據保護重建曲線 圖 4-4 透過軟體分析 Cameraman 測試影像離散餘弦轉換係數之 DC 值與其配對 的第二項離散餘弦轉換係數值後,使愈4 10且4 22的重建情況。 我們從 Lossy 曲線可以發現,當壓縮感知的離散餘弦部分遇到破壞之後,與 圖 4-1 和圖 4-2 於破壞 18%的程度之後所得到的品質一致,然而重建的品質與 圖 4-4 互相觀察,可以發現 PSNR 改善至 27 dB,與之前使用最佳參數所得到 的改善品質要高。由此結果反映著對於壓縮感知的壓縮數據做以 PCT 架構傳輸 上的保護,最佳的參數設定在一定程度上可以達到系統最佳的重建品質,然而 若是可以進一步的分析各個數據之間的關係,使用非均勻保護措施並規範針對 此一重點性數據做必要的參數設定,對於終端資訊的最後取得將可以得到更好 的確切的結果資訊。 更進一步地討論非均勻保護,除了對其上述討論的 DC 像與其第二配對項 分析其 PCT 之1和
2所應該設定的角度之外,我們將隨後壓縮感知中比較不具 重要性之壓縮數據以同樣的參數做保護,如此的話,受保護的係數達全部壓縮感 知的係數為 25%;意指 25%的壓縮感知數據全部以同樣的 PCT 參數做保護;其餘之 75%36 不做破壞亦不做保護,其結果可得圖 4-4 與圖 4-5。 (a) Lossy 25% PSNR: 24.37 dB SSIM:0.13 (b) 0 0.3 2 1 4 PSNR: 26.83 dB SSIM:0.26 (c) 4
1
0
2
0
.
35
PSNR: 27.00 dB SSIM:0.32 (d) 4
1
0
2
0
.
45
PSNR:28.92 dB SSIM:0.48 圖 4-5 25% Lossy 包含 DCT 直流數據不平等保護重建輸出影像 圖4-5為當包含壓縮感知的離散餘弦中的DC值受到破壞之後,在接收端縮收到的 影像結果,其餘(b)(c)和(d)為依序變化2的角度,可以發現當2與1相差越大, 重建效果將更好,影像的辨識程度SSIM由原來的0.13上升到了0.48,若我們直接 以視覺觀察的話,除了一些細節的影像呈現方面外,我們可以很清楚的辨識出影 像原來資訊所要表達的內容。 PCT 變異數參數分析由(3.9a)和(3.9b)式可以發現重建的變數包含了
A、 B
、C和qc,在 PCT 的系統分析中,qcqd qcd,且c qcd,因此在 分析與實作的過程中忽略量化的變異數[14]。37 圖 4-6 B A r PSNR 曲線 以 PCT 架構下的變異數設定 B A r ,且
A
B,我們以 10%的破壞程度重建, 我們發現唯有σA趨近σB的時候有最佳的重建品質,而且其變化的程度也大概約 於 0.4 dB,因此變異數在壓縮感知的數據的保護上設定為
B0.99
A,以得到 較佳的重建品質。以 PCT 的傳輸架構其結果雖然以 PSNR 量測效果大概在 1dB 左 右,但是若是以影像的結構性量測則具有不錯的效果,而影像結構的重建決定了 原始影像的辨識程度,因此,壓縮是可以透過 PCT 的架構保護影像資訊遺失的風 險。4.4 壓縮感知數據應用於通道傳輸
我們在第三章說明訊源編碼的階段不同的資料處理對於 PCT 的架構是如何 影響重建的品質。於第四章逐一探討壓縮感知壓縮數據實行於 PCT 最好參數的選 取之可能性與最好參數設定重建之後的結果與曲線,可以歸納看出資料處理對於 重建品質的影響程度和系統參數的設定的複雜或簡單有很大的關係。,PCT 架構38 的最好的建議參數設定的 2 種方式;
2
1,
2
1;經過實驗證實符合最佳 參數設定的結果的趨勢。 參數的設定上,以
2
1, 1 B A r , sin1 1 r2 r 作為 PCT 參數的設定;並 且在訊源編碼階段以不相同的資料處理方法重建輸出的結果。 圖 4-7 C-ES 與 P-C-ES PCT 保護重建 PSNR 曲線39 (a) Lossy 10% PSNR: 28.42dB SSIM: 0.22 (e) Lossy 10% PSNR: 28.42dB SSIM: 0.22 (b) P-C-ES 1 3 13 PSNR:29.38 dB SSIM: 0.33 (f ) C-ES 1 3 2 3 PSNR:28.38dB SSIM:0.20 (c) P-C-ES 1 414 PSNR: 29.28 dB SSIM: 0.33 (g) C-ES 14 24 PSNR: 28.49 dB SSIM:0.21 (d)P-C-ES 1 6 1 6 PSNR: 28.72 dB SSIM: 0.21 (h) C-ES 1 6 26 PSNR: 28.49 dB SSIM: 0.14 圖 4-9 C-ES 和 P-C-ES PCT 保護重建輸出影像
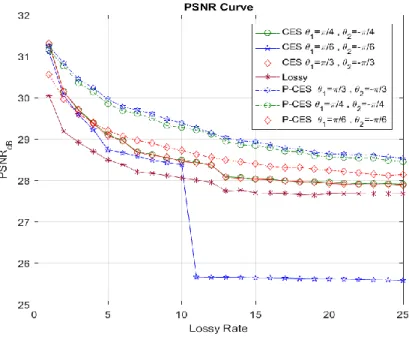
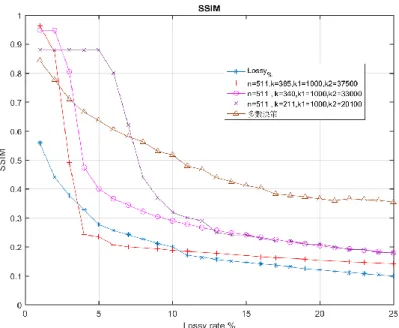
40 圖 4-7 和圖 4-8 為圖 4-1 和圖 4-2 曲線多增加以像素-係數分離(P-C-ES)的 處理之後,所可以達到的保護重建的效果與之比較。我們可以看到以 P-C-ES 的 前置作業之影像傳輸重建情況明顯的與 P-ES 情況佳,除了相差小的最佳選取角 度之外,可以明顯與 P-ES 的方式辨別出差異,小角度的重建品質也遵循圖 4-1 和圖 4-2 所討論。 圖 4-9 第一行與第二行分別為在 10%遺失通道所形成的隨機雜訊,第一行在 對偶資料的選擇上是選擇差異比較小的數據做編碼,而第二行是使用基底係數序 列依序編碼,我們就可以觀察到,兩者之間的差異。左邊的重建方法 PSNR 相較 之下比較有改善,SSIM 也有些許改善,整體上觀察,第一行的方法比第二行的 方法略佳。就視覺上的觀察,左行的方法比較柔和而右邊比較銳利。不同於 PCT 的數據保護方法,BCH 錯誤更正碼使用時機以單通道為主,
B
y y y y y 1 2 3 ,y即之前所討論的壓縮感知之壓縮數據,B 為 block 的數量,如此的話,我們可以得到 B
k
C C C C1 2 3 y ,每一個 Block 包含有 C1 到 Ck 個 y 係數元素,當我們使用 BCH 編碼之後,可得到受保護的數據 為:
B
Code Code Code ode1 2 3 C BCH 且
n
G G G G odeB 1 2 3 C , 表示每一個區塊(Block)原來的 k 個元素,經過受保護的 BCH 編碼之後,形成長 度為n個元素.因此累贅量可以表示為 * % n n-k R 100 。 Source Encoder to binary BCH encode by n block for protection BCH code lossy simulation Generate random lossy signal The lossy BCH code result BCH deocde Uncompress CS CS compress to get y Output 圖 4-10 BCH 傳輸程序模擬41 我們是以圖 4-10 完成 BCH 錯誤更正碼模擬程序。另一類於傳統單通道傳輸以及 媒體讀取設備沿用已久的技術為多數決策的技術。壓縮數據將經過 3 次的重複傳 輸並且在接收端以多數決策的方式衡量接收訊息的可信度。因此我們在或然率上 可以確保當兩次讀取相同即正確傳輸是可行的。其模擬流程可由圖 4-11 表示。 值得討論的是 BCH 錯誤更正碼有一累贅量的衡量,可以用來與多數決策比較使用 的效率的優劣。圖 4-13 可以觀察出,在實際的輸出重建上,也如預期的發現隨 著破壞的程度增高與破壞的曲線約同斜率的下降,並約於 13%之前能夠維持於破 壞曲線的上方。值得注意的是,於之前所敘述當代系統在設計上的特性,低於 13%破壞程度應以選擇 BCH 的保護方式為優,原因在於 BCH 在低破壞程度可以達 到 100%的重建效果,而多數決策的方式並無法達到此優良程度,但是如果環境 與系統的抵抗雜訊較低,我們可以設定 k 的值較大,如 k=211,在破壞程度達到 5%的時候依然可以達到 100%的重建效果,相較於多數決策的方式為佳.可是其 中亦要考慮到多數決策與 BCH 中的 k 值使用效率上的關係。 原始影像 CS壓縮數據 y 重複傳輸三次 以變數暫存 器儲存 三次 + Generate random lossy signal 1% - 25% 多數決策 程序 相同係數>=2 , 決定 取得重建係數 y Uncompress CS Output 圖 4-11 多數決策傳輸程序模擬