國 立 交 通 大 學
光 電 工 程 研 究 所
博 士 論 文
全場顯微干涉術及其在折射率及
表面形貌之量測應用
Full-field microscopic interferometry and its
applications on the measurements of refractive
index and surface topography
研 究 生 : 陳彥良
指導教授 : 蘇德欽 教授
全場顯微干涉術及其在折射率及
表面形貌之量測應用
Full-field microscopic interferometry and its
applications on the measurements of refractive
index and surface topography
研究生:陳彥良 Student: Yen-Liang Chen
指導教授:蘇德欽 教授 Advisor: Prof. Der-Chin Su
國立交通大學
光電工程研究所
博 士 論 文
A Dissertation
Submitted in Partial Fulfillment of the Requirements
For the Degree of Doctor of Philosophy in
The Institute of Electro-Optical Engineering
College of Electrical Engineering and Computer Science
National Chiao-Tung University
Hsin-Chu, Taiwan, R.O.C.
全場顯微干涉術及其在折射率及表面形貌之量測應用
研究生:陳彥良
指導教授:蘇德欽 教授
國立交通大學 光電工程研究所
摘 要
本論文主要描述利用外差干涉術取代目前顯微干涉術中的傳統光干涉方 法,進而改良成為全場外差干涉顯微技術。利用此技術可量測微米尺度下的二維 相位延遲分佈、折射率分佈、表面形貌分佈等等。將單點量測擴展成為全場時, 必須解決參考訊號的取得問題,在此提出兩種可決定全場絕對相位的新方法,利 用較低振幅鋸齒波或非對稱三角波做為驅動電光晶體的電壓訊號,使得外差干涉 訊號產生斷點而決定出參考相位,進而得到絕對相位。 在二維相位延遲的量測方法中,以共光程干涉儀的架構,使外差光束通過 待測樣本與檢偏板,在任一像素位置上擷取到呈現弦波的干涉光訊號,其相位則 為相位延遲量。這些取樣數據可經由IEEE 1241 標準規範中提到的最小平方弦波 擬合法,擬合成一連續弦波,待扣除參考訊號之相位後,則可求得該像素位置的 相位延遲,而其他像素亦可藉此方法得到,即可完成全場相位延遲分佈的量測。 在折射率分佈的量測方法中,提出一種垂直入射的方法來進行。利用線性 與旋光外差光束依序進入一改良式Twyman-Green 干涉儀的光學架構中並得到干 涉訊號之相位值,之後由 Fresnel 公式可推得相位與折射率之間的關係,而解出 二維折射率分佈。在表面形貌分佈的量測方法中,將外差光束準直後進入一改良 式 Linnik 顯微鏡的光學架構並得到干涉訊號之相位值,之後由兩臂光程差與相 位差值的關係進而解得二維表面形貌分佈。另外為了改良顯微鏡系統之量測區域 範圍與角度大小的限制,利用影像縫合技術,將不同位置或不同角度所測得多張 影像的重疊區域,經由最佳化的旋轉平移矩陣運算而縫合成一完整影像,進而得 到完整的樣本表面形貌。 本論文所提出的量測方法有光學操作簡單、高量測解析度以及高重現性等 優點。Full-field microscopic interferometry and its applications on the
measurements of refractive index and surface topography
Student: Yen-Liang Chen
Advisor: Prof. Der-Chin Su
Institute of Electro-Optical Engineering
National Chiao Tung University
ABSTRACT
The heterodyne interferometry is introduced to the conventional interference microscopy to measure full-field phase retardation, refractive index distribution and surface topography. For determining full-field absolute phases, two different voltage signals, the saw-tooth wave with lower amplitude and the asymmetric triangle wave, are applied to drive the electro-optic modulator. Their break point positions are used to derive the reference phases.
A common path heterodyne interferometry is applied to measure the full-field phase retardation. A heterodyne light passes through the sample and an analyzer. The interference intensities recorded at any pixel of camera are the sampling points of a sinusoidal signal. The phase of that pixel can be derived with a least-square sine fitting algorithm on IEEE 1241 standard. Subtracting the reference phase, the phase retardation can be obtained. The retardations at other pixels can be obtained similarly.
The full-field phase distributions are measured with a modified Twyman-Green interferometer, in which linearly/circularly polarized heterodyne light beams are used in order. The measured data are substituted into the special equations derived from Fresnel equations, and the full-field refractive index distribution can be obtained. In addition, the height distribution can be calculated from the phase distribution measured by using a modified Linnik microscope with a heterodyne light source. Because the measurable region of a microscope is restricted, the overall topography of measuring larger samples cannot be obtained in a single measurement. It can be improved by measuring at different angles and positions. Then, these data are merged together to form the associated geometrical topography with the image stitching method. The above methods have several merits such as easy operation, high resolution and rapid measurement.
誌 謝
能夠順利完成這本論文,首先最要感謝的是我的指導老師 蘇德欽教授,在 這五年的研究生活中,老師的言教與身教開闊了我在學識領域的視野,以及對生 活各方面的體悟。老師對教學本土化的理念與堅持,以及嚴謹的治學精神,也深 刻地影響了我對於從事研究工作的認知,使我從中學習並培養做研究應該具備的 方法與態度。另外實驗室的環境非常舒適和諧,感謝老師讓我在此良好的環境中 愉快地成長與學習。 其次我要感謝近幾年從實驗室畢業的學長們, 李朱育博士、 許正治博士、 陳坤煌博士以及 陳敬恒博士,由於有他們過去的研究基礎,我才能站在巨人的 肩膀上往前看,感謝他們在我研究的過程中,不吝給予許多研究建議與生活上的 關心;感謝實驗室的夥伴,謝博任、簡志成、楊惠婷、謝鴻志、吳旺聰與張巍耀 等人,在研究、修課與實驗方面的協助與陪伴;感謝工研院量測中心的各級長官, 主任 段家瑞博士、副主任 林增耀博士、組長 彭國勝博士、副組長 藍玉屏博士、 室主任 劉惠中先生,以及計畫主持人 姚斌誠博士、 傅尉恩博士與溫博浚先生 提供我兼職工作的機會,使我求學期間的家庭經濟來源不致於匱乏;感謝過去曾 同時在量測中心服國防役的弟兄們,葉大綱博士、王振宇博士、吳乾埼博士、 徐炯勛博士、林志明先生以及鄭凱宇先生,在工作與生活方面的陪伴扶持與關 懷;另外也要感謝目前的同事,也是一起奮鬥並即將拿到博士學位的戰友們, 潘善鵬先生、溫博浚先生與陳智榮先生等人,在學業與工作方面的討論與支援。 最後要感謝我的家人,父親 陳宗泰先生、母親 高秀鳳女士、岳母 林錦珠 女士、弟弟彥廷、妹妹品心、小姨子謝美美、連襟許皓程、小舅子謝濬澤以及我 的妻子佩芬,謝謝他們的支持與鼓勵,使我有勇氣、毅力且無後顧之憂地完成學 位。兩個兒子宥勳與泓鈞在我求學期間相繼問世,感謝上天賜與這最好的禮物。 願將此榮耀獻給我最愛的家人!目 錄
中文摘要... i
英文摘要... ii
誌 謝... iii
目 錄... iv
圖 目 錄... vii
第一章 緒論...1
參考文獻...4第二章 全場外差干涉術 ...6
2.1 前言...6 2.2 外差光源與外差干涉術之原理 ...6 2.2.1 使用電光晶體調制的外差光源...6 2.2.2 外差干涉術的原理...8 2.3 全場外差干涉術的相位解析方法 ...9 2.3.1 測試訊號與參考訊號...9 2.3.2 相位計算...10 2.4 全場外差干涉術的誤差分析 ...11 2.5 小結...12 參考文獻...13第三章 全場相對相位與絕對相位之量測 ...16
3.1 前言...16 3.2 全場相對相位延遲之量測 ...18 3.2.1 參考訊號與測試訊號之相位計算...18 3.2.2 二維相位延遲量測之實驗結果...20 3.2.3 二維相位延遲量測之誤差分析...24 3.3 全場絕對相位量測原理之一 ...25 3.3.1 干涉訊號之波形...253.3.2 決定絕對相位之理論...29 3.4 全場絕對相位量測原理之二 ...32 3.4.1 干涉訊號之波形...32 3.4.2 決定絕對相位之理論...35 3.5 絕對相位量測方法之比較與量測誤差 ...39 3.5.1 量測四分之一波片的全場相位延遲...39 3.5.2 訊號處理之比較...42 3.5.3 理論誤差之比較...42 3.6 小結...43 參考文獻...44
第四章 垂直入射式折射率顯微術與其應用 ...47
4.1 前言...47 4.2 原理...48 4.3 實驗與結果...52 4.3.1 量測 GRIN lens ...52 4.3.2 量測 ITO...54 4.4 討論...59 4.4.1 量測 GRIN lens ...60 4.4.2 量測 ITO...60 4.5 小結...61 參考文獻...62第五章 奈米級表面形貌與表面粗度之量測 ...64
5.1 前言...64 5.2 原理...65 5.3 實驗結果...68 5.4 討論...71 5.5 小結...72 參考文獻...73第六章 利用影像縫合技術改良干涉顯微術 ...76
6.1 前言...76 6.2 原理...76 6.2.1 掃描白光干涉顯微鏡...76 6.2.2 微硬度計壓頭之量測準則...78 6.2.3 影像縫合...80 6.2.4 多張影像縫合步驟...83 6.3 實驗與結果...83 6.4 討論...90 6.5 小結...91 參考文獻...92
第七章 結論...94
簡 歷...96
著 作...97
圖 目 錄
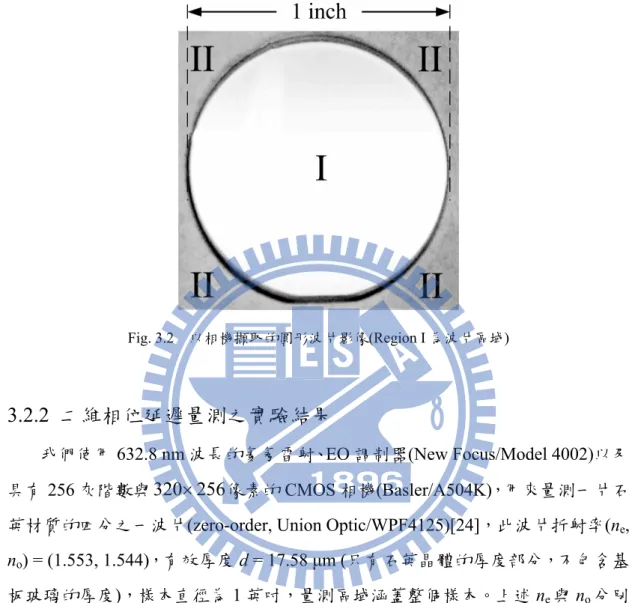
Fig. 2.1 驅動電光晶體的電壓信號 ...8 Fig. 2.2 在 n 張拍攝影像相對應像素上,記錄一序列的干涉光強度 ...11 Fig. 3.1 量測全場相位延遲之光路架構圖 ...18 Fig. 3.2 以相機擷取的圓形波片影像(Region I 為波片區域)...20 Fig. 3.3 全場相位延遲分佈的量測結果(以灰階表示)...21 Fig. 3.4 沿著 Fig. 3.3 中底下的虛線處所畫出的一維相位延遲分佈...21 Fig. 3.5 在 Fig. 3.3 中方形虛線框區域的相對相位延遲分佈...22 Fig. 3.6 樣本 A 中央位置的相對相位延遲分佈 ...23 Fig. 3.7 樣本 B 中央位置的相對相位延遲分佈...23 Fig. 3.8 使用電光晶體調制器之共光程外差干涉儀 ...26 Fig. 3.9 全場共光程外差干涉儀架構圖 ...28 Fig. 3.10 (a)干涉訊號變化情形;(b)人為修改使其成為連續弦波 ...29 Fig. 3.11 尋找「最佳片段」的迭代判斷條件 ...29 Fig. 3.12 在任意兩個鄰近的取樣片段中間插入一段週期差t...31 Fig. 3.13 描述 3.3 節的處理過程流程圖 ...31 Fig. 3.14 外差光源架構圖 ...32 Fig. 3.15 非對稱三角波波形示意圖 ...33 Fig. 3.16 當 由 –180° 改變至 180°時光強度的變化情形...35 Fig. 3.17 以 3.4 節的方法擷取離散數據示意圖 ...36 Fig. 3.18 改良式弦波擬合示意圖 ...38 Fig. 3.19 描述 3.4 節的處理過程流程圖 ...39 Fig. 3.20 以 3.3 節的方法在(+100,+100)像素位置的取樣光強度訊號 ...40 Fig. 3.21 以 3.4 節的方法在(+100,+100)像素位置的取樣光強度訊號 ...40 Fig. 3.22 以 3.3 節的方法量測四分之一波片之全場相位延遲分布 ...41 Fig. 3.23 以 3.4 節的方法量測四分之一波片之全場相位延遲分布 ...41Fig. 4.1 垂直入射式折射率顯微術之光學架構圖 ...48
Fig. 4.2 GRIN Lens 之二維折射率分布量測結果(立體顯示) ...53
Fig. 4.3 GRIN Lens 之二維折射率分布量測結果(等高線圖顯示) ...53
Fig. 4.4 在不同的值的條件下,n 與 ∆n 之關係曲線 ...55 Fig. 4.5 ITO 軟性電子基板之二維折射率量測結果...56 Fig. 4.6 軟性電子基板之撓曲測試示意圖 ...57 Fig. 4.7 ITO 軟性電子基板之二維折射率量測結果(撓曲 1000 次後)...58 Fig. 4.8 ITO 軟性電子基板之二維折射率量測結果(撓曲 4000 次後)...58 Fig. 4.9 將 Fig. 4.8 中方框標示處放大...59 Fig. 4. 10 在 1000 次與 4000 次撓曲後,比較三種量測結果之變化 ...61 Fig. 5.1 改良式 Linnik 顯微鏡之光路架構圖...65 Fig. 5.2 待測表面粗度樣本示意圖 ...69 Fig. 5.3 表粗樣本之全場相位量測結果 ...69 Fig. 5.4 將 Fig.5.3 進行二維相位解纏繞運算後所得之全場相位分佈圖...70 Fig. 5.5 全場表面粗度形貌 ...70 Fig. 5.6 兩種量測方法的結果之比較 ...71 Fig. 6.1 Mirau 型掃描白光干涉顯微鏡之系統架構圖 ...77 Fig. 6.2 當 α = 90°時待測圓錐型壓頭曲線之幾何關係 ...78 Fig. 6.3 多張影像縫合技術之步驟 ...82 Fig. 6.4 硬度計壓頭之四張影像量測結果 ...85 Fig. 6.5 影像縫合結果 ...86 Fig. 6.6 影像縫合結果之正向圖 ...87 Fig. 6.7 (a)通過壓頭頂點處的曲線;(b)兩者的差異 ...87 Fig. 6.8 利用最小平方擬合法計算(a)夾角角度與(b)探頭半徑 ...88 Fig. 6.9 (a) P 的面積函數繪圖;(b)與理論的差異曲線...89
第一章 緒論
在量測或計量(metrology)領域中,干涉儀是強而有力的工具之一,它具有 快速、非破壞及無需接觸等優點,並且提供了其他技術所無法達到的高靈敏度, 在幾乎所有工程或物理相關機構中都被廣泛地使用。在光學起源的歷史中,光的 干涉現象常是被提及的一筆,這個現象也挑戰了十七世紀科學家對光的自然現象 的解釋,尤其是牛頓(Newton)與海更斯(Huygens)[1-2]。在十九世紀時,雖然干涉 的原理已清楚地被瞭解,但當時干涉儀卻很少有其他應用,其原因在於光源同調 長度的限制[3]。直到 1960 年代雷射光的出現,這個強大技術的完整能力才終於 被廣泛應用。到目前為止,雷射干涉儀已廣泛地用於量測距離、速度、角度、平 坦度、直線度,以及動態量測等方面。 將干涉儀與顯微鏡等兩種功能的儀器結合成為單一儀器,,藉以觀察微米尺 度的物體,即成為顯微干涉術。就如同使用一般的顯微鏡一樣,為了觀察不透光 物體(反射式)或透明物體(穿透式),干涉顯微鏡亦有不同的設計。利用通過待測 樣本(或反射自待測樣本表面)以及反射自參考鏡的同調光束產生干涉的方法,把 相位差(或光程差)轉換為振幅(即光強度)變化的顯微鏡,根據干涉圖形可分辨出 待測樣本的結構,並可測定樣本中某區域內的相位差或光程差。由於顯微鏡需結 合高數值孔鏡(numerical aperture)的物鏡使其具有高解析力(resolving power),因 此其光束在有限的視野中亦為有限光展量(etendue)。最早的一套可用的傳統干涉 顯微鏡是在1950 年由 Dyson[4]所設計,而後 Smith[5-6]在 1954 年設計出加入偏 極元件的干涉顯微鏡,並首次將此儀器推出市場。然而,上述儀器皆有雙影像的 問題,直到Horn 在 1958 年提出以 Mach-Zehnder 干涉儀做為基本架構的干涉顯 微鏡[7],才避免此問題。然而此型干涉顯微鏡價格昂貴。它不使用偏極光,但 在參考與測試光路上卻需要使用完全一樣且可準確匹配的顯微物鏡與聚光鏡。發 展至今,目前常見的商用型干涉顯微鏡,可依據分開光束方法的不同,區分為 Michelson、Mirau 與 Linnik 三種不同類型。由於光學架構上的限制,在物鏡的放 大倍率方面,Michelson 型為 2.5x 與 5x,Mirau 型為 10x、20x 與 50x,而 Linnik量測原理(移相干涉術或掃描白光干涉術),而完成二維表面形貌之檢測,其側向 解析度可達次微米等級,而縱向解析度可達奈米等級。 外差干涉術由於具有快速量測及高精確度等優點,因此被廣泛的應用在距離 的量測[8,9]及表面粗糙度檢測[10,11]。在 1990 年代,也將外差干涉術配合全反 射的條件來量測液體的折射率[12,13]或是量測磁頭滑動器的飛行高度及其等效 複數折射率[14,15]。在本研究中,我們以外差干涉術取代目前顯微干涉術中的傳 統光干涉方式,進而改良成為全場(二維)外差干涉顯微技術。利用此技術可量測 微米尺度下的二維相位延遲分佈、折射率分佈、表面形貌分佈等等。 在第二章中的部分將介紹外差干涉術的基本原理,如何將傳統單點量測的 外差干涉術擴展成為全場的外差干涉術,以及說明全場外差干涉術的相位解析與 誤差分析方法。 在第三章中將說明全場外差干涉術中的相對相位與絕對相位量測方法,以 及二者之參考訊號如何取得的問題。在絕對相位量測的部份,描述了我們提出的 兩種新方法。最後以共光程的全場外差干涉光路架構,量測波片的全場相位延遲 分佈做為例子,藉以說明此方法之可行性。 在第四章中將說明利用外差干涉顯微術量測二維折射率分佈的原理與方 法。首先描述此垂直入射式之外差干涉顯微術之原理,接著描述以GRIN lens 做
為待測樣本,量測其二維折射率分佈。之後改以indium tin oxide (ITO)做為待測 對象,設計一種撓曲測試的方法與實驗結果,並利用量測之折射率改變的結果, 觀察其內應力的作用情形。最後討論此方法的優缺點與其誤差分析。 在第五章中將介紹利用此外差干涉顯微術量測奈米級表面形貌與表面粗度 的原理與方法。首先使外差光源進入一改良式的 Linnik 顯微鏡架構中,利用不 共光程的外差干涉術,使干涉後的待測樣本影像成像於相機上。經由相位計算、 相位解纏繞[16]與濾波處理[17],可得表面粗度形貌分佈。
在第六章中將說明利用影像縫合技術改良干涉顯微術的原理與方法。由於 干涉顯微鏡限制了量測範圍的區域與角度大小,利用影像縫合技術,將多張影像 縫合成一張,可得到完整的樣本表面形貌。本章以圓錐形的羅氏鑽石硬度計壓頭 做為待測樣本,最後測得其壓頭半徑與圓錐角度,藉以展示此方法之可行性。 在最後一章將對本研究作一個總結,以外差干涉術結合顯微術而成之全場外 差干涉顯微術,可測得s-與 p-偏光間的二維相位差分佈,並應用於數種光學常數 之二維分佈檢測。最後歸納本研究所得之結論。
參考文獻
1. P. Hariharan, “Optical interferometry,” 2nd ed., (Academic press), Chap. 1, pp.1-6 (2003).
2. E. Hecht, “Optics,” 4th ed., (Addison Wesley), Chap. 9, pp.385-392 (2002).
3. K. J. Gasvik, “Optical metrology,” 3rd ed., (John Wiley & Sons), Chap. 3, pp.38-63 (2002).
4. J. Dyson, “An interferometer microscope,” Proc. Roy. Soc. A. 204, 170-187 (1950).
5. F. H. Smith, “Two half-shade devices for optical polarizing instruments,” Nature
173, 362–363 (1954).
6. F. H. Smith, “Microscopic interferometry,” Research 8, 385–395 (1955).
7. W. Horn, Mikro-interferenz, Jahrbuch fur optik und feinmechanik. N. 3, 4, 5, 6 (1956, 1957, 1958, 1959).
8. E. Collett, “Polarized light: fundamentals and applications,” (Marcel Dekker, New York), 515-556 (1993).
9. H. Kikuta, K. Iwata, and R. Nagata, “Distance measurement by the wavelength shift of laser diode light”, Appl. Opt. 25, 2976-2980 (1986).
10. E. Gelmini, U. Minomi, and F. Docchio, “Tunable, double-wavelength heterodyne detection interferometer for absolute distance measurement”, Opt. Lett. 19, 213-215 (1994).
11. G. E. Sommargren, “Optical heterodyne profilometry”, Appl. Opt. 20, 610-618 (1981).
12. D. Pantzer, J. Politch, and L. Ek, “Heterodyne profiling instrument for the angstrom region”, Appl. Opt. 25, 4168-4172 (1986).
13. D. C. Su, J. Y. Lee, and M. H. Chiu, “New type of liquid refractometer”, Opt. Eng.
37, 2795-2797 (1998).
14. C. C. Hsu, K. H. Chen, and D. C. Su, “Normal incidence refractometer”, Opt. Commun. 218, 205-211 (2003).
15. B. K. A. Ngoi, K. Venkatakrishnan, and B. Tan, “Scanning laser differential-heterodyne interferometer for flying-height measurement,” Appl. Opt.
39, 578-584 (2000).
16. D. C. Ghiglia and M. D. Pritt, “Two-dimensional phase unwrapping: theory, algorithms, and software,” Wiley, New York, (1998).
17. ISO 11562, “Geometrical product specifications (GPS) – surface texture: profile method – metrological characteristics of phase correct filters,” (1996).
第二章 全場外差干涉術
2.1 前言
由於外差干涉術具有量測精確度高、速度快,且可避免背景光以及光源穩 定度的影響等等優點,使其能夠廣泛地應用於各類物理量的量測,例如表面輪廓 或粗糙度量測[1,2]、物體微小位移量測[3]、小角度[4,5]、絕對距離量測[6,7]、折 射率量測[8-10]以及雙折射率量測[11]等。典型的外差干涉術[12]是將兩個具有不 同頻率的波前互相干涉的技術,在干涉前先將待測參數引入光的相位中,再利用 鎖相技術對干涉後的訊號進行相位解析,藉由相位變化量與待測參數之間的關 係,可推得待測參數的數值。過去在本實驗室的研究中,利用電光晶體調制器 (electro-optic modulator)產生外差光源,應用於折射率[8,9]、小角度[4,5]、微小位 移[3]、液體濃度[13,14]、厚度[15,16]等量測,然而上述的研究皆屬於單點的量測 方法,若利用上述方法對待測物整個面積範圍進行量測時,往往是以掃描的方式 進行,如此將十分耗時且會因使用掃描元件而產生額外誤差。在本研究中,我們 利用快速CMOS 相機做為光偵測器,以擷取全場(二維)的干涉信號,而成為全場 外差干涉術。外差光源同樣利用電光晶體調制器產生,並依據共光程或不共光程 干涉儀的原理,引入垂直偏光(s-)與水平偏光(p-)之間的相位差。相較於傳統單點 量測的外差干涉術,全場外差干涉術多了光學成像系統以及全場相位解析的問題 必須額外考慮,因此本章將根據上述內容進一步說明,首先2.2 節簡單介紹外差 光源與外差干涉術的基本原理,接著2.3 節介紹全場外差干涉術中的相位解析方 法,而全場外差干涉術的誤差分析將在2.4 節中作探討。2.2 外差光源與外差干涉術之原理
2.2.1 使用電光晶體調制的外差光源
一般常用的電光晶體材料有ADP(NH4H2PO4)、KDP(KH2PO4)等[17,18], 當外加電壓於電光晶體時,會使其具有雙折射效應。此時若一線性偏振光進入此電光晶體,則會因其水平偏振(p-)與垂直偏振(s-)方向的折射率不相同,使得兩偏 振光之間產生相位延遲(phase retardation)為 z V V
0 , (2.1) 其中Γ0為未加電壓時的相位延遲,Vz為外加電壓且Vπ為電光晶體的半波電壓。 而電光晶體相位延遲的Jones 矩陣[19]可寫成
2 2 0 0 i i e e EO (2.2) 接著我們使用如Fig. 2.1 所繪之鋸齒波電壓訊號 Vz(t)來驅動電光晶體,此鋸 齒波之頻率為f 且振幅為 Vπ,以數學形式可表示為
t mT
V V
T V t Vz 2 b , (2.3) 其中 mT t
m1
T,m 為整數,T=1/f 為鋸齒波訊號之週期,V 為鋸齒波直b 流部分。將Eq. (2.3)代入 Eq. (2.1)後,可得知相位延遲量會隨著時間而改變
2
b 0 V V V mT t T t , (2.4) Eq. (2.4)中,可經由適當地調整直流電壓V 而使得後面兩項為零,此時電光晶體b 相位延遲的Jones 矩陣可改寫成
2 2 2 2 2 2 0 0 0 0 t i t i t f i im t f i im e e e e e e EO , (2.5) 其中 = 2f。若使偏振方向為45 之線性偏光通過電光晶體後,其電場的 Jones vector 可寫成 i t t i t i in o e o e e E EO E 1 1 2 1 0 0 2 2 i t t i t i o e e e 2 2 2 1 , (2.6) 其中 ω0為雷射光頻率。由 Eq. (2.6)可知經過電光晶體調制的線性偏光會變成在 s-與 p-偏光之間具有角頻率差大小為 ω 的外差光源。 Fig. 2.1 驅動電光晶體的電壓信號
2.2.2 外差干涉術的原理
假設兩個具有不同頻率的波前電場型式為 E1
t a1exp
i1t , (2.7) 與 E2
t a2exp
i2t
, (2.8) 其中 a1與 a2分別為兩波的振幅,ω1與 ω2分別為兩波的振幅為兩波的角頻率, 而為兩波的相位差。在光偵測器上的電場型式則為兩波之電場互相重疊,亦即 為E E1E2,因此光強度可寫成I
t E a a2 2a1a2cos
t
2 2 1 2 , (2.9) 其中ω 為兩波的角頻率差( 12 )。由於光偵測器輸出的電子訊號強度正比 於其接收的光強度,所以處理電子訊號就等同於處理光學干涉訊號。由Eq. (2.9) 可知干涉訊號為一連續弦波訊號,兩波的相位差則被保留在此弦波訊號的相位 項裡。將此干涉訊號與一個具相同角頻率ω 的參考訊號相互比較後,便可求得 的數值。 對於利用電光晶體調制器之外差干涉術而言,即是將 Eq. (2.6)外差光源中 的s-與 p-偏光載入不同的相位,其電場形式則類似於 Eq. (2.7)與(2.8),而此相位 差與待測參數之間存有一個關係,可據此進一步將待測參數求出。2.3 全場外差干涉術的相位解析方法
2.3.1 測試訊號與參考訊號
根據Eq. (2.9),可將此測試訊號重新改寫成 t t t t t A t B t C I ( ) cos(
) sin(
) , (2.10) 另外,由於在全場干涉訊號中是使用快速 CMOS 相機做為光偵測器,若我們將 某個指定像素的干涉訊號做為參考訊號,則其頻率亦會與其他像素相同,且此干 涉訊號可寫成 r r r r t A t B t C I ( ) cos(
) sin(
) , (2.11) 其中At、Bt、Ct、Ar、Br以及Cr皆為實數,上述兩訊號間的相位差可以表示成 r r t t r t A B A B 1 1 tan tan , (2.12)由Eq. (2.12)可知,若可明確地得到 At、Bt、Ar以及Br等數值,則便可估算得到。 另外由Eq. (2.12)亦得知,t 與r 之數值應會落於( 2, 2)之間,然而若加上 考慮At、Bt、Ar以及Br的正負號(正數或負數),便可知道此相位是位於哪一個象 限,因而將t 與r的可能範圍擴大至(, )之間。因此根據 Eq. (2.12),的範 圍可以在(2,2)之間,然而若不是在(, )之間,則必須用使用類似相位 解纏繞(phase unwrapping)的方法[20]來修正其數值,亦即將分別加上2或2 之後,只取其中數值落於(, )範圍的那一個結果,而此修正後的結果則為待 測的相位差值。
2.3.2 相位計算
我們使用一架拍照頻率為fs的CMOS 相機,在記錄時間內共擷取 n 張影像, 因此每個像素皆記錄n 個干涉光強度數值的一個序列,就相當於在一個弦波訊號 上做取樣的動作,如同Fig. 2.2 所示。對任一像素而言,若在時間為 t1、t2、…tn 時共擷取 n 個干涉光強度,且其數值分別為 I1、I2、…In,則亦可以將其表示成 如同Eq. (2.10)的形式,若以矩陣方式表示,則為 C B A M I I I n : 2 1 , (2.13) 其中 1 sin cos : : : : : : 1 sin cos 1 sin cos 2 2 1 1 n n t t t t t t M . (2.14)記載的最小平方弦波擬合法而推導出來,可將其表示成 n t t I I I M M M C B A : 2 1 1 ) ( , (2.15) 其中M 代表 M 的轉置矩陣。接著將 A 與 B 的估算值代入 Eq. (2.12)中,即可計t 算得到該像素(x,y)位置的相位差值(x,y)。若將上述過程用於其他像素上,則可得 到全場相位分佈的情形。 Fig. 2.2 在 n 張拍攝影像相對應同一像素上,每個像素皆記錄一序列(n 個)的干涉光強度
2.4 全場外差干涉術的誤差分析
全場外差干涉術的相位量測誤差主要來源有(1)相機取樣誤差(2)偏極混合誤 差,玆分成以下兩小節加以討論。2.4.1 相機取樣誤差[22]
此項誤差會與外差干涉訊號的頻率、相機的記錄時間、拍照頻率、曝光時間 以及相機灰階數有關。Jian 等人以積分運算模擬數位相機的取樣方式,並改變上 述與誤差有關的各項變數後,以數值分析方法計算得到相位誤差量的估計值 [22]。在本論文中,使用 Jian 等人所發表的最佳實驗條件[22],取樣誤差 估s 計約為0.036°。2.4.2 偏極混合誤差[24-26]
當光線通過如檢偏板與偏極分光鏡等 偏光元件時,常會發生偏極混合 (polarization mixing)的現象。假設偏極板調整在 p-偏光方向,則除了主要的 p-偏 光會通過之外,還會耦合一小部分的s-偏光,反之亦然。此偏極混合誤差可根據 偏極板產品規格中的消光係數進一步估算其修正量。在本研究中使用的偏極板 (Japan Sigma Koki, Ltd.)的消光係數為1105,經修正後,估計偏極混合誤差可 降至 = 0.03°[23]。 p 因此,本方法的總誤差可估計為 = s + ∆p = 0.066°。2.5 小結
在本章中說明了使用電光晶體調制之外差干涉術的基本原理,以及將傳統外 差干涉術擴展至全場量測時,在相位解算方面有著不同於單點量測的方法,接著 探討本方法主要的誤差來源,包括相機取樣誤差與偏極混合誤差等。參考文獻
1. G. E. Sommargren, “Optical heterodyne profilometry”, Appl. Opt. 20, 610-618 (1981).
2. D. Pantzer, J. Politch, and L. Ek, “Heterodyne profiling instrument for the angstrom region”, Appl. Opt. 25, 4168-4172 (1986).
3. D. C. Su, M. H. Chiu, and C. D. Chen, “A heterodyne interferometer using an electro-optic modulator for measuring small displacements”, J. Opt., 27, 19-23 (1996).
4. M. H. Chiu and D. C. Su, “Angle measurement using total-internal-reflection heterodyne interferometry”, Opt. Eng. 36, 1750-1753 (1997).
5. M. H. Chiu and D. C. Su, “Improved technique for measuring small angle”, Appl. Opt. 36, 7104-7106 (1997).
6. H. Kikuta, K. Iwata, and R. Nagata, “Distance measurement by the wavelength shift of laser diode light”, Appl. Opt. 25, 2976-2980 (1986).
7. E. Gelmini, U. Minomi, and F. Docchio, “ Tunable, double-wavelenght heterodyne detection interferometer for absolute distance measurements”, Opt. Lett. 19, 213-215 (1994).
8. M. H. Chiu, J. Y. Lee, and D. C. Su, “Refractive Index Measurement Based on the Effects of the Total Internal Reflection and the Uses of the Heterodyne Interferometry”, Appl. Opt. 36, 2936-2939 (1997).
9. D. C. Su, J. Y. Lee, and M. H. Chiu, “New Type of Liquid Refractometer”, Opt. Eng. 37, 2795-2797 (1998).
10. J. Y. Lee and D. C. Su, “A Method for Measuring Brewster’s Angle by Circularly Polarized Heterodyne Interferometry”, J. Opt. 29, 349-353 (1998).
of a linear birefringent retardation plate”, Opt. Commun. 133, 11-16 (1997).
12. R. S. Sirohi and M. P. Kothiyal, “Optical Components, Systems, Measurement Techniques”, (Marcel Dekker, Inc., New York), 219-246 (1992).
13. K. H. Chen, C. C. Hsu, and D. C. Su, “Measurement of the concentration of a solution with the surface plasmon resonance heterodyne interferometry,” Opt. Eng.
42, 1884-1887 (2003).
14. K. H. Chen, C. C. Hsu, and D. C. Su, “Interferometric optical sensor for measuring glucose concentration,” Appl. Opt. 42, 5774-5776 (2003).
15. Z. C. Jian, C. C. Hsu, and D. C. Su, “Improved technique for measuring refractive index and thickness for a transparent plate,” Opt. Commu. 226, 135-140 (2003). 16. K. H. Chen, C. C. Hsu, and D. C. Su, “A method for measuring the complex
refractive index and thinckness of a thin metal film,” Appl. Phys. B 77, 839-842 (2003).
17. H. Takasaki, M. Isobe, T. Masaki, A. Konda, T. Agatasuma, and Y. Watanable, “An automatic retardation meter for automatic polarimetry by means of an ADP polarization modulator”, Appl. Opt. 3, 371-377 (1964).
18. B. H. Billings, “The electro-optic effect in uniaxial crystal of the type XH2PO4. I. Theoretical”, J. Opt. Sci. Am. 39, 127-133 (1949).
19. A. Yariv and P. Yeh, “Optical waves in crystals”, Chap.5, (John Wiley & Sons, Inc.,), 121-154 (1984).
20. D. C. Ghiglia and M. D. Pritt, “Two-dimensional phase unwrapping: theory, algorithms, and software,” Wiley, New York, (1998).
21. IEEE, “Standard for terminology and test methods for analog to digital converters,” IEEE Std 1241-2000, 25-29 (2000).
for full-field heterodyne interferometry,” Opt. Eng. 46, 115604 (2007).
23. M. H. Chiu, J. Y. Lee, and D. C. Su, “Complex refractive-index measurement based on Fresnel’s equations and uses of heterodyne interferometry”, Appl. Opt. 38, 4047-4052 (1999).
24. C. M. Wu and R. D. Deslattes, “Analytical modeling of the periodic nonlinearity in heterodyne interferometry”, Appl. Opt. 37, 6696-6700 (1998).
25. W. Hou and G. Wilkening, “Investigation and compensation of the nonlinearity of heterodyne interferometers”, Prec. Eng. 14, 91-98 (1992).
26. A. E. Rosenbluth and N. Bobroff, “Optical sources of nonlinearity in heterodyne interferometers”, Prec. Eng. 12, 7-11 (1990).
第三章 全場相對相位與絕對相位之量測
3.1 前言
在2.3.1 節中曾提到有關全場外差干涉術的參考訊號問題,當利用外差干涉 術進行二維表面形貌之量測時,由於表面形貌為二維平面上的相對高度變化情 形,因此所測得的相位,可以是測試訊號中所有像素的相位值,相對於待測面上 某個指定像素相位值的「相對相位」,亦即我們可以用該指定像素的干涉訊號做 為全體像素的參考訊號。然而,若是要利用外差干涉術進行二維折射率的量測, 由於折射率具有絕對的數值大小,除非待測面上的某個指定像素位置的折射率為 已知量,否則無法利用上述的方法來得到參考訊號,而必須另外找測試訊號以外 的干涉或電子訊號做為參考訊號,進而得到測試訊號的二維「絕對相位」分佈。 在本章中,我們利用外差干涉術進行二維相位延遲的量測,藉以實現全場相對相 位與絕對相位之量測。待測樣本對象為圓形波片,在3.2 節中,量測範圍為包含 整個波片的方形區域,此區域的四個角落為光束未通過樣本的部分,已知其相位 延遲量為零,因此可作為參考訊號使用,而由其相對數值可得知待測樣本的相位 延遲分佈,然而此方法僅可算是相對相位的量測法。接著,若量測範圍為未出波 片範圍的方形區域,則在3.3 節與 3.4 節中,我們提出兩種得到參考相位的方法, 進而測得全場的絕對相位,可直接量測通過樣本中央的絕對相位延遲分佈。 光學材料的雙折特性經常被應用在許多研發領域中,例如液晶、石英晶體 等等。準確地測量快軸與慢軸間的相位延遲,對於平面顯示器、光電等相關產業 而言皆是一項必要的檢測技術,例如可藉測量液晶層的相位延遲而推算與製程參 數相關的尺寸間隙值。過去多位研究者開發了數種測量雙折材料的相位延遲的方 法[1-11],並有很好的量測結果,然而除了 Lo 的方法[11]之外,其餘的方法都僅 限於單一探測點的量測方法。雖然Lo 的方法可用在雙折材料的全場相位延遲分 佈的量測,但該方法是使用類似移相干涉技術[12]的方法。為了改進量測準確 度,在本章3.2 節的內容中,我們提出另一個量測全場相位延遲的方法。將一經 過準直的外差光源擴展成平行光束後通過待測樣本與檢偏板,在任一像素位置上擷取到的干涉光強度皆呈現一序列之弦波訊號,這些取樣數據可經由2.3.2 節中 提到的最小平方弦波擬合法,擬合成一連續弦波,待扣除參考訊號之相位後,則 可求得該像素位置的相位延遲,而其他像素亦可藉此方法得到,即可完成全場相 位延遲分佈的相對量測。本章在3.2 節的內容中描述此方法之原理,以波片做為 待測對象所得的實驗結果,以及誤差分析的探討。相較於其他方法,本方法同時 具有共光程干涉術與外差干涉術的優點。 在現有外差干涉儀中[7,14-17],是利用測試訊號以及參考訊號間的相位差而 得到絕對相位,其中參考訊號可由分光鏡的另一道光訊號或者從電子儀器的電子 訊號而得到。一般而言,上述的方法對於單點量測可說是一種高解析的技術。然 而當我們欲將其擴展至全場量測時,若以二維掃描的方式進行,則量測過程將十 分地耗時且冗長,因此,藉由一快速相機於有限曝光時間內擷取離散訊號,而建 置的一套方便的全場外差干涉術,實有其必要性。雖然Jian 等人[18]曾經提出應 用全場外差干涉術進行量測的最佳條件,但尚未提及量測絕對相位時如何獲得參 考訊號(相位)的方法。若使用與單點量測相同的方法來得到參考訊號,則會因為 擷取參考訊號與測試訊號的電子元件必為不同之元件,兩者之間很難做到同步擷 取,且當以程式下達開始擷取的觸發訊號給此二元件時,兩者之間的開始擷取時 間,會存在著一個不確定的時間差,無法經由後處理的方式做修正,因此利用傳 統方法將難以測得絕對相位。過去有數篇已發表的相關論文[19-22],然而除了 Akiba 的方法[22]之外,其他皆僅針對相對相位的量測。在 Akiba 的方法中,提 到了利用一對相同的相機同時擷取參考與測試的兩張影像,然而實際上欲調整兩 張影像使其具相同位置而進行比對,實有其困難。在本章3.3 節與 3.4 節的內容 中,我們共提出兩種在共光程外差干涉儀的架構下,對 Chiu 的方法[17]進行改 良,而決定全場絕對相位的方法。Chiu 的方法具有好的量測結果,然而該方法 僅適用於單點量測。首先3.3 節描述傳統方法與我們第一種採用振幅低於半波電 壓的鋸齒波訊號來驅動電光晶體調制器的方法。其次在3.4 節我們對第一種方法 做進一步的改良,提出第二種採用非對稱三角波訊號來驅動電光晶體調制器的方 法。接著在3.5 節中,我們分別討論用第一種與第二種方法量測同一片四分之一 波片的全場相位延遲分佈的量測結果、訊號處理方式以及量測誤差的比較。
3.2 全場相對相位延遲之量測
3.2.1 參考訊號與測試訊號之相位計算
Fig. 3.1 量測全場相位延遲之光路架構圖。LS:雷射光源;EO:電光晶體調制器; LVA: 線性電壓放大器;FG:訊號產生器;MO:顯微物鏡;PH:針孔;CL:準直透鏡; S:待測樣本;AN:檢偏板;IL:成像透鏡;C:CMOS 相機;PC:個人電腦。 本方法的實驗架構圖如 Fig. 3.1 所示,一線性偏極雷射光通過由訊號產生 器FG 與線性電壓放大器 LVA 所驅動的電光晶體調制器 EO,驅動 EO 的電壓訊 號是頻率為 f 且振幅等於 EO 半波電壓 Vπ的鋸齒波訊號。此光束經過顯微物鏡 MO 與針孔 PH,再由一準直透鏡 CL 準直後,通過待測樣本 S 與檢偏板 AN,最 後經由成像透鏡IL 將影像成像於一快速 CMOS 相機 C 上。S 為我們常用的圓形 波片,它可由IL 進行成像。S 的影像則會落於 C 的感測平面上,其範圍如同 Fig.3.2 中的 Region I 所示,而感測平面上的其他區域就標示成 Region II。若在 Region I 與 Region II 裡像素的電場大小分別為 Et與Er,則其光強度就分別為It Et 2 以 及Ir Er 2,其中It與Ir分別表示測試訊號與參考訊號。 為方便起見,在此我們定義 +z 軸為光前進方向,且 y 軸為垂直方向。首先 使雷射光的線性偏極方向與x 軸夾 45°,且 EO 調制器的快軸與 S 的快軸皆沿 x 方向。若AN 的穿透軸方向調整至與x 軸夾 45°,則E 與t Er的Jones 向量可推導 如下 [23]
o t AN S EO E E t f i t f i t f i i i e e e e e 2 0 2 2 1 1 2 1 0 0 0 0 1 1 1 1 2 1 t f i t f i t f i t f i t f i e e e e e 2 0 ) 2 2 ( ) 2 2 ( ) 2 2 ( ) 2 2 ( 2 2 1 , (3.1) 以及 o r AN EO E E t f i t f i t f i e e e 2 0 1 1 2 1 0 0 1 1 1 1 2 1 t f i t f i t f i t f i t f i e e e e e 2 0 ) 2 2 ( ) 2 2 ( ) 2 2 ( ) 2 2 ( 2 2 1 , (3.2) 其中 f0 代表光頻率且 表示由 S 造成的相位延遲,其相關的光強度可以分別 表示為 )] 2 cos( 1 [ 2 1 r t ft I , (3.3) 以及
r
r ft I 1 cos 2 2 1 , (3.4) 其中 為初始相位。由於 Ir t與Ir皆為弦波訊號,可根據2.3 節的方法解出全場相位延遲分佈( yx, )。另外,為了增加量測準確度,測試訊號 Ir 中的參考相位r
是由Regions II 裡的所有像素的相位平均值而計算得到。
Fig. 3.2 以相機擷取的圓形波片影像(Region I 為波片區域)
3.2.2 二維相位延遲量測之實驗結果
我們使用632.8 nm 波長的氦氖雷射、EO 調制器(New Focus/Model 4002)以及 具有256 灰階數與320256像素的CMOS 相機(Basler/A504K),用來量測一片石 英材質的四分之一波片(zero-order, Union Optic/WPF4125)[24],此波片折射率(ne,
no) = (1.553, 1.544),有效厚度d = 17.58 μm (只有石英晶體的厚度部分,不包含基 板玻璃的厚度),樣本直徑為 1 英吋,量測區域涵蓋整個樣本。上述ne與no分別 代表非尋常(extraordinary)與尋常(ordinary)光折射率。量測條件為 f =100 Hz, 144 V V,CMOS 相機的拍照頻率 fs =1499.3 frames/sec,且在 0.2 秒的時間內 總共擷取了n = 300 張影像。其中 fs的選擇是依據Jian 等人所提出的最佳化條件 [18],以降低量測誤差。接著,我們以 MATLAB 軟體撰寫 2.3.2 節中提到的最小 平方弦波擬合理論的程式,利用此程式估算每個像素的 數值。而全場相位延遲
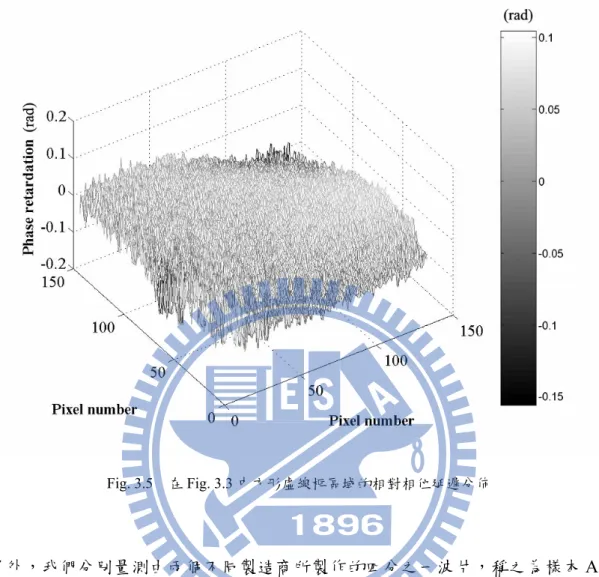
便以灰階的方式繪於Fig. 3.3 中,其平均相位延遲為 1.573 radians,另外沿著 Fig. 3.3 中虛線位置的一維相位延遲分佈曲線,也表示於 Fig. 3.4 中。由 Fig. 3. 4 可瞭
解,在圓周附近的邊界繞射,強烈地影響其鄰近的量測結果。此外,對於Fig. 3.3
radians 間的差異)的分佈情形可計算並繪於 Fig. 3.5 中,而其標準差為 0.030 radians。
Fig. 3.3 全場相位延遲分佈的量測結果(以灰階表示)
Fig. 3.5 在 Fig. 3.3 中方形虛線框區域的相對相位延遲分佈
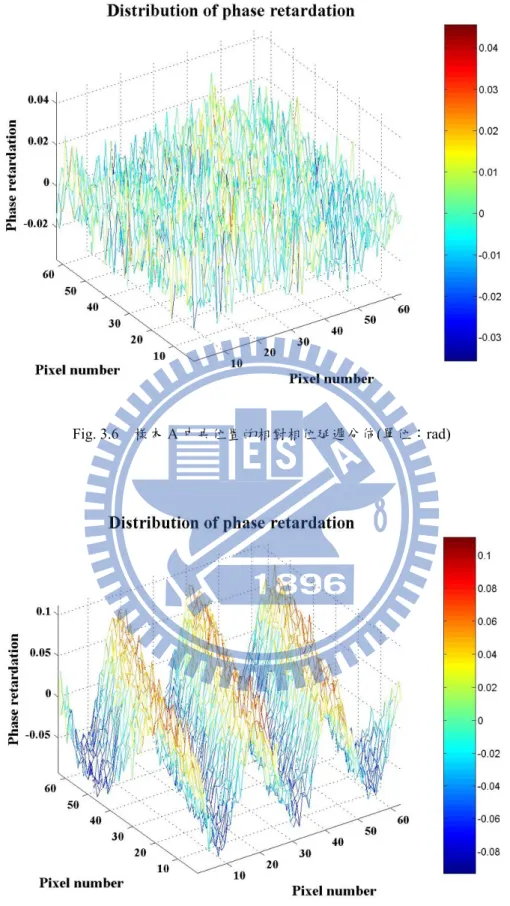
另外,我們分別量測由兩個不同製造商所製作的四分之一波片,稱之為樣本A
與樣本B,並局部觀察靠近中央區域(約6060像素大小)的相對相位延遲分佈情
形,將此二結果按照Fig. 3.5 的方式分別繪於 Fig. 3.6 與 Fig. 3.7 中。其中,二者 相位延遲分佈的標準差分別為0.010 radians 以及 0.049 radians,經比較此二結果 後,可以得知樣本A 具有較佳的均勻性(uniformity),而在樣本 B 中可以清楚地 見到週期性出現的相位延遲改變情形,推測應為加工製造過程中雙折材料層的厚 度不均勻所造成。
Fig. 3.6 樣本 A 中央位置的相對相位延遲分佈(單位:rad)
3.2.3 二維相位延遲量測之誤差分析
本方法中,相位差的量測誤差可能會由以下幾項因子所引起: (1) 準直誤差 此項誤差是與光束準直的優劣有關,若光束的中央部分調整成垂直方向進入 待測波片,則假設光束外圍部分會以 角度入射波片。根據 Chang 的技術[25], 可改進此準直光的品質達到 = 0.02°。若光傳波方向與雙折樣本的光軸方向夾 角為 ,則可將有效非尋常光折射率 ne( )表示如下[26] 2 2 2 2 2 1 cos sin ( ) e o e n n n , (3.5) 因此,相關的準直誤差 可寫成 c
( ) 360 ne no d c ; (3.6) 其中 為光波長。若將我們的實驗條件(ne,no) = (1.553,1.544)、d = 17.58 μm、 = 90º ± 0.02º 以 及 = 0.6328 μm 代 入 Eqs. (3.5) 與 (3.6) , 則 可 以 得 到 ) 10 1 . 1 ( 5 c º。此外,Region II 的干涉訊號對比度會由於乘上係數 cos( ) 而降低,當小於 10º 時,對比度幾乎不變,因此,光束的準直品質幾乎不會 影響Region II 的量測結果。 (2) 取樣誤差與偏極混合誤差 此兩項誤差詳細描述於 2.4 節裡,不再贅述,分別為取樣誤差 = 0.036°s 以及偏極混合誤差 = 0.03°。 p (3) 方位角角度誤差 此項誤差是由於EO 調制器的快軸與待測雙折樣本的快軸之間沒有對準所造成,若此兩快軸之間有一夾角,則此項角度誤差 會受 a 與 的影響。此 項誤差可如同Chiu 等人所做的估計方法[6]而得到,假設在 = 90º 時| | = 5º, 則可得a 0.03。 因此,本方法的總誤差可估計為 0.1 。此外,本方法亦可用來檢測樣 本相位延遲的均勻性。
3.3 全場絕對相位量測原理之一:以振幅低於 V
π的鋸齒波
驅動電光晶體調制器的方法
3.3.1
干涉訊號之波形
以電光晶體調制器調制的傳統共光程外差干涉儀,做為單點量測的 光學架構如Fig. 3.8 所示。在此為方便說明起見,定義 +z 軸方向為光前進 方向且 y 軸方向為垂直方向。外差光源 HLS 包含一線偏光雷射 LS、具 Vπ 半波電壓的電光晶體調制器 EO、線性電壓放大器 LVA 以及訊號產生器 FG。一與 x 軸夾 45° 角之線偏光通過光軸與 x 軸夾 0° 角之 EO,此時從 FG 以及LVA 而來的具直流偏壓的外加鋸齒波電壓訊號對 EO 進行調制。在傳 統的外差干涉儀中,鋸齒波電壓的振幅為 Vπ,則設 Vz為鋸齒波電壓且可表 示如Eq. (2.3)所示,其中 T 與 Vb 分別為鋸齒波電壓的週期與直流部分,若 將直流電壓V 調整為b 1 0 V Vb , (3.7)則將Eq. (3.7)代入 Eq. (2.4)後,可使得 Eq. (2.4)的後面兩項和為零[27]。然而
在本方法中,假設鋸齒波電壓的振幅改為V,則 Eq. (2.3)可重新改寫成
t mT
V V
T V t Vz 2 b , (3.8)其中mT t
m1
T。將Eq. (3.7)代入 Eq. (3.8),可得
t mT
V V V T V t Vz 0 2 , (3.9) 將Eq. (3.9)之 Vz代入Eq. (2.1)後,在 s-與 p-偏光之間所造成的相位延遲可以 表示如下
V V mT t V V T t 2 ,
0 2 t mT T V V (3.10) 在上述運算中,Γ0項(未加電壓時的相位延遲)會被消掉。由 Eq. (3.10)可知, 其中相位 V V 0 , mT t
m1
T,且 m 為一整數。 Fig. 3.8 使用電光晶體調制器之共光程外差干涉儀。LS: 雷射光源;EO: 電光晶體調制器; FG: 訊號產生器;LVA: 線性電壓放大器;BS: 分光鏡;AN: 檢偏板;D: 光偵測器。當光束穿透(或反射自)測試樣本後,會在 s-與 p-偏光之間引入一個額外的相 位差,之後,此光束通過檢偏板 ANt 並進入光偵測器 Dt,其中 ANt 的穿 透軸與x 軸夾 45° 角,而測試訊號則可寫成 )] cos( 1 [ 2 1 ) (t I 1 cos[2 ( ) ] 2 1 0 mT t T V V
1 ~ 0 ) ( 2 1 rect )] 2 cos( 1 [ 2 1 m i T i t T t t T V V , (3.11) 其中 ψ = – 0,m~代表m 的最大值,算符 rect[ ]以及符號 * 分別代表方波 函數以及摺積(convolution)運算。在 Eq. (3.11)中可知弦波的週期為VT V , 且方波的窗寬以及窗形delta 函數的週期皆為 T,在傳統方法中,是選擇了 V = Vπ 的運作條件,此時 Eq. (3.11)可以改寫成 [1 cos(2 )] 2 1 ) ( T t t I , (3.12) 且I(t)成為一連續的弦波訊號。通常由光偵測器 Dr或FG 得到的參考訊號之 形式為 T t t Ir 1 cos2
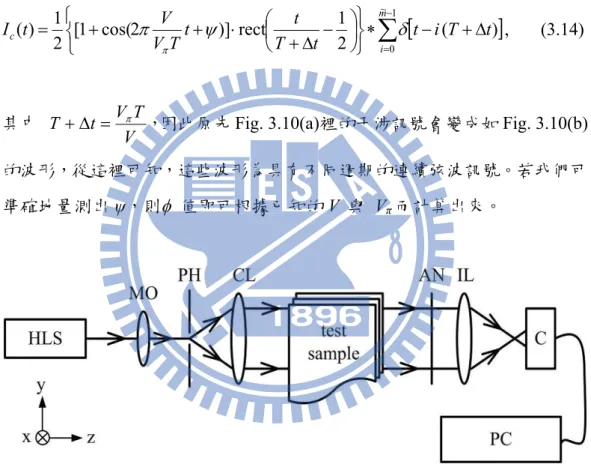
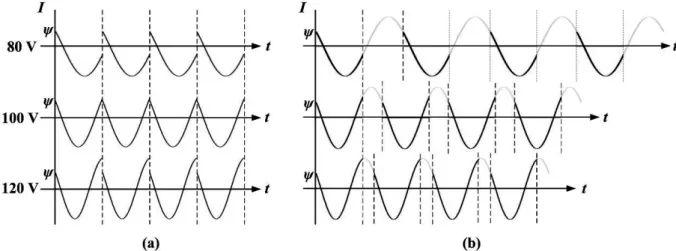
2 1 ) ( . (3.13) 因此數值 ψ 可以很容易地經由相位計或鎖相放大器比較測試訊號與參考訊 號而得到。另一方面,對於全場量測的要求,其光學架構必須修改成為如 Fig. 3.9 所示。將顯微物鏡 MO、針孔 PH 以及準直透鏡 CL 加入光學架構中, 用來擴大並準直光束。AN 的穿透軸與 x 軸仍然是夾 45° 角,另外用一快速 CMOS 相機來取代 Dt。由於此二維的干涉訊號是在一個短暫的時間內完成取樣動作,每個像素所取出的干涉訊號與從 Dr或 FG 得到的訊號間會存在 一個不確定的時間差,因此若使用傳統的方法,我們很難同時得到每個像素 的ψ 值。若在 V < Vπ 的條件下,Eq. (3.12)之弦波訊號的週期將大於 T,而 I(t)將成為一群週期弦波片段,而每個片段具有的初始相位為 ψ。為了清楚 說明,我們使V 從 80 V 到 120 V 且間格 20 V 的方式逐一改變,在當 ψ = 60° 且Vπ = 148 V 時所得到的干涉訊號如 Fig. 3.10(a)所示。若方波的窗寬以及窗 形delta 函數的週期皆增長為 (T + ∆t),則 Eq. (3.11)可以表示成
1 ~ 0 ) ( 2 1 rect )] 2 cos( 1 [ 2 1 ) ( m i c t i T t t T t t T V V t I , (3.14) 其中 V T V tT ,因此原先Fig. 3.10(a)裡的干涉訊號會變成如 Fig. 3.10(b)
的波形,從這裡可知,這些波形為具有不同週期的連續弦波訊號。若我們可 準確地量測出ψ,則 值即可根據已知的 V 與 Vπ而計算出來。
Fig. 3.9 全場共光程外差干涉儀架構圖。HLS: 外差光源;MO: 顯微物鏡;PH: 針孔; CL: 準直透鏡;AN: 檢偏板;IL: 成像透鏡;C: CMOS 相機;PC: 個人電腦。
Fig. 3.10 (a) 在 Vπ = 148 V 且 ψ = 60° 的條件下,當 V 從 80 V 到 120 V 且間隔 20 V 連續改變時的干涉訊號變化情形;(b) 將相對應的干涉訊號以增長週期 的方式做人為的修改,使其成為一連續弦波訊號。
3.3.2
決定絕對相位之理論
Fig. 3.11 尋找「最佳片段」的迭代判斷條件:(a) Pm+1 Cm + T;(b) Pm+1 Cm + T。 在V < Vπ的條件下,當我們使用一快速CMOS 相機對干涉訊號做紀錄 時,於每個像素所擷取的離散數位訊號如Fig. 3.11 所示,其中 • 標示位置 代表取樣位置,而在時間軸上,弦波片段的理論起始點會位在片段與片段相 接的局部極端位置,此位置可經由將 Eq. (3.11)進行二次微分運算而決定出 來,然而此位置與由相機所擷取的起始擷取點位置不會相同。理論上,某一 片段的最後一點應該等同於其下一片段的起始點,然而由於每個片段的取樣 起始點不可能總會在相同的相對位置上,且取樣起始點不可能總會剛好取在 理論起始點的位置上。為了找出一個取樣起始點最接近理論起始點的「最佳 片段」,在此假設於第m 個片段中,Pm 以及 Cm 分別表示為該片段之取樣起始點以及時間比較點,且令其符合初始條件C1 = P1 ,則以下條件 ; if , 1 1 C T P C T Cm m m m (3.15a) Cm1Pm1, if Pm1CmT. (3.15b) 必須由m = 1,2,3,…,i 依序進行疊代,直至找出最佳片段為止。為了清楚說
明起見,Eq. (3.15a)以及 Eq. (3.15b)的條件可分別另以 Fig. 3.11(a)以及 Fig. 3.11(b)做說明,若第 i 個片段為最佳片段,則將時間軸位移至使 Pi = 0 之位 置,Eq. (3.14)則變成
1 0 ) ( 2 1 rect )] 2 cos( 1 [ 2 1 ) ( h g s i f g t t T V V t T V V t I , (3.16) 其中 g 為正整數, fs 以及 h 分別表示取樣頻率以及在第 i 個片段內的取 樣 點 個 數 。 接 著 在 任 意 兩 個 鄰 近 的 取 樣 片 段 中 間 插 入 一 段 週 期 差 V T V V t( ) ,如同Fig. 3.12 所示。基於最小平方弦波擬合理論[13], 此取樣片段可被擬合成一連續弦波,並表示成 )] 2 cos( 1 [ 2 1 ) ( t T V V t Ic C t T V V B t T V V A cos(2 ) sin(2 ) . (3.17) 其中 A、B 以及 C 皆為實數且 ψ 可由以下公式得到 A B 1 tan . (3.18) 因此,絕對相位 便可依據決定出之0而被計算出來。另外為了便於理解, 在此將本節完整的處理過程整理如Fig. 3.13 中的流程圖所示。Fig. 3.12 在任意兩個鄰近的取樣片段中間插入一段週期差t。
3.4 全場絕對相位量測原理之二:以非對稱三角波驅動電光
晶體調制器的方法
3.4.1 干涉訊號之波形
Fig. 3.14 外差光源架構圖。LS: 線偏光雷射光源; EO:電光晶體調制器; FG:信號產生器; LVA: 線性電壓放大器。 以電光晶體調制器EO 調制的外差光源如 Fig. 3.14 所示,為方便起見, 在此定義+z 軸為光前進方向且 y 軸為垂直方向。一與 x 軸夾 45°角之線偏光 通過 EO,若 EO 之光軸方向沿著 x 軸,則在傳統的外差干涉儀中,s-與 p-偏光之間所造成的相位延遲可以表示如Eq. (2.1)所示[27],另外 Vz為鋸齒波 電壓且可表示如下
t t mT V V T V Vz 2 ( 0) b , mTtt0
m1
T , (3.19) 其中m 為整數,t0為取樣的起始點至下一個鋸齒波訊號起點的時間差,T 與 Vb 分別為鋸齒波電壓的週期與直流部分,可將 Vb調整如Eq. (3.7)所示,若將Eq. (3.7)代入 Eq. (2.4),則可使得 Eq. (2.4)的後面兩項和為零。而此時 Eq. (3.19)可重新改寫為
V mT t t T V Vz ( 0) 0 2 , mTtt0
m1
T . (3.20)然而在本方法中,Vz 改為週期為 T 的非對稱三角波,如 Fig. 3.15 所示,其 中電壓上升部分的時間間距為2T/3,電壓下降部分為 T/3,則上升與下降部 分的電壓可分別表示成 V mT t t T V Vz 0 0) ] [( 3 , mT tt0 (m2/3)T, (3.21a) 以及 V T m t t T V Vz 0 0) ( 1) ] [( 6 , (m2/3)T tt0 (m1)T. (3.21b)
將Eq. (3.21a)與(3.21b)分別代入 Eq. (2.1),可得到
m T t t 3 0 , mT t t (m 2/3)T 0 , (3.22a) 以及 T t t 0 6 , (m2/3)T tt0 (m1)T. (3.22b) Fig. 3.15 非對稱三角波波形示意圖。
當此外差光束應用於全場量測時,在其穿透(或反射自)測試樣本後,會在 s-與p-偏光之間引入一個額外的相位差,如Fig. 3.9 所示。之後,此光束通過 檢偏板 AN 並進入一快速 CMOS 相機 C,其中 AN 的穿透軸與 x 軸夾 45° 角,因此測試訊號之光強度可寫成 1 cos(3 ) 2 1 ) ( 0 m T t t I , mT tt0 (m2/3)T, (3.23a) 以及 1 cos(6 2 ) 2 1 ) ( 0 T t t I , (m2/3)T tt0 (m1)T, (3.23b) 其中0 = 3πt0/T,代表在 t = 0 時讀取的第一個訊號處的起始相位。當 Eq. (3.23) 中具有不同的相位改變時,I(t)之變化情形可繪得如 Fig. 3.16 所示,由圖中 可知單一週期內的I(t)波形只會隨著待測相位而改變,而不會隨著起始相位 0而改變。因此若我們可以分別量測出Eq. (3.23a)與(3.23b)的相位 ψ1 = – 0 + – mπ 以及 ψ2 = – 20 – ,則0可由下列算式扣除且可一併得到待測相位 為 3 ) 2 ( 1 2 . (3.24)
Fig. 3.16 當 由 –180° 改變至 180°時,光強度的變化情形。
3.4.2 決定絕對相位之理論
在Fig. 3.9 中,當我們使用 C 對干涉訊號做紀錄時,其拍照頻率為 fs 且
在時間為0, Δt, 2Δt,…, (n-1)Δt 時進行共 n 張照片之拍攝,其中 Δt = 1/ fs。每
像素所擷取的離散數位訊號如 Fig. 3.17 所示,其中 或 ○ 標示位置代表 取樣位置,而在時間軸上,弦波片段與片段相接的斷開位置可經由將紀錄到 的離散數據進行二次微分運算而決定出來。接著,由這些斷開位置可將弦波 片段按其弦波頻率分成fA = 3/2T (A 組)與 fB = 3/T (B 組)兩組,如 Fig. 3.17 中 分別以 與 ○ 標示的不同位置,由於此兩組數據的取樣時間位置並不做任 何後處理之改變,因此各數據點皆具有相同的參考時間起點,其相對應光強 度方程式分別如Eq. (3.23a)與(3.23b)所示。 Fig. 3.17 以 3.4 節的方法擷取離散數據示意圖。A 組(標示):f = 3/2T;B 組(標示○):f = 3/T。
將A、B 兩組分離後,分別如 Fig. 3.18(a)與 3.18(d)所示。對於 A 組而言,
其偶數片段與奇數片段之間具有 π 的相位差,因此無法將 A 組內所有斷開
的週期片段直接擬合成一連續弦波訊號。在此若以人為方式將 A 組內的所
有奇數片段(m 為奇數的片段)之數值做 π 的相位補償,則 A 組便如同 Fig. 3.18(b)所示,可進一步將所有週期片段擬合成一連續弦波訊號,如 Fig. 3.18(c)
所示。若以公式表示,相位π 的補償可藉由在傅立葉級數展開式中的 cos 項
與sin 項前面加上負號來達到,因此 Eq. (3.23a)可另外表示成
)] 3 cos( 1 [ 2 1 ) ( 1 A T t t I 1 1 1 cos(3 ) sin(3 T) C t B T t A , if m is even; (3.25a) )] 3 cos( 1 [ 2 1 ) ( 1 A T t t I 1 1 1 cos(3 ) sin(3 ) C T t B T t A , if m is odd; (3.25b)
亦即 1 1 1 1 1 1 1 A A A A A A : : : 1 ) ) ( 3 sin( ) ) ( 3 cos( : : : 1 ) ) 1 ( 3 sin( ) ) 1 ( 3 cos( 1 ) 3 sin( ) 3 cos( : : : 1 ) 3 sin( ) 3 cos( 1 ) 0 3 sin( ) 0 3 cos( : ) ) ( , 2 ( : ) ) 1 ( , 1 ( ) , 1 ( : ) , 0 ( ) 0 , 0 ( ) ( C B A M C B A T t Tf k T t Tf k T t k T t k T t k T t k T t T t T T t Tf k I t k I t k I t t m I t m I t I c c c , (3.26) 其中A1、B1與C1皆為實數,可根據2.3 節的方法計算得到,進而求出 ψ1。 另外對於 B 組數據而言,其所有的週期片段皆具有相同的相位,因此可直 接以2.3.2 節的方法將 B 組內所有斷開的週期片段擬合成一連續弦波,並表 示成 )] 6 cos( 1 [ 2 1 ) ( 2 B T t t I 2 cos(6 ) 2 sin(6 ) C2 T t B T t A , (3.27) 其中A2、B2以及C2皆為實數,亦可根據2.3 節的方法計算得到,且可求出
ψ2。將ψ1與ψ2代入Eq. (3.24),便可計算得到絕對相位。Fig. 3.18(c)與 3.18(e)
為分別對A 組與 B 組數據進行弦波擬合之結果示意圖,亦即其擬合曲線(圖 中實線)分別為 IA(t)與 IB(t)。在 Fig. 3.18(a)中每相鄰兩片段之中會有一個恰 好與擬合曲線反向的片段,雖然該片段並未落於擬合曲線上,但經由 Eq. (3.26)之改良式弦波擬合運算處理,該片段之數據對於 ψ1之擬合結果仍能有 所貢獻,而不致於浪費。另外為了便於理解,在此將整個處理過程整理如 Fig. 3.19 中的流程圖所示。
Fig. 3.18 改良式弦波擬合示意圖。(a) A 組取樣數據;(b) 將 A 組內的奇數 片段(m 為奇數)做 π 相位補償;(c) 將(b)擬合成一連續弦波(實線部分);
Fig. 3.19 描述 3.4 節的處理過程流程圖
3.5 絕對相位量測方法之比較與量測誤差
3.5.1 量測四分之一波片的全場相位延遲
為了顯示前述兩種方法的可行性,在此我們分別利用前述兩種方法量測
相同的四分之一波片的全場相位延遲分布。光源為波長等於 632.8 nm 的
He-Ne 雷射光,半波電壓 Vπ = 148 V 的 EO 調制器 (New Focus/Model 4002),
並 使 用 具 8-bit 灰 階 數 與 200 200 影 像 解 析 度 之 CMOS 相 機 (Basler/A504K)。在 3.3 節的方法中,量測條件為 T = 1 s,fs = 45.1 frames/s,
並以振幅等於120 V 的鋸齒波電壓驅動 EO;在 3.4 節的方法中,量測條件
為T = 1 s,fs = 49.1 frames/s,並以振幅等於 Vπ的非對稱三角波電壓驅動EO。
位置所取得的光強度訊號分別如Fig. 3.20 與 Fig. 3.21 所示,而全場相位延 遲量測結果分別顯示於Fig. 3.22 與 Fig. 3.23 中,其平均值皆為 89.9°,而標 準差分別為0.7°與 0.5°。
Fig. 3.20 以 3.3 節的方法在(+100,+100)像素位置的取樣光強度訊號
Fig. 3.22 以 3.3 節的方法量測四分之一波片之全場相位延遲分布