Short Paper
__________________________________________________
Genetic Optimization of Fingerprint Recognition
Based on Core Sub-Region
*JING-WEIN WANGAND WEN-YUAN CHEN+
Institute of Photonics and Communications National Kaohsiung University of Applied Sciences
Kaohsiung, 807 Taiwan
+
Department of Electronic Engineering National Chin-Yi University of Technology
Taichung, 411 Taiwan
Fingerprint images that are captured by optical readers usually cannot locate a fin-gerprint since the rotation and the translation are always together. Considering that both real-time and accurate requirements are need for live applications, this paper presents a novel approach to recognizing a fingerprint based on the core sub-region, which is the area of 100 × 100 pixels surrounding the core point. Log-polar mapping is used to ex-tract the translation-invariant features derived from the discrete wavelet frame transform. Finally, a Bayesian likelihood ratio-based fitness function is devised to genetically select the most discriminative log-polar feature subset by disregarding redundant features via support vector machines classification. The classification results are given for real fin-gerprint data. Experimental results show that the proposed method can reject imposters efficiently and achieve an over 98% recognition rate operating with two frames/s proc-essing speed. In comparison to the related works, the proposed system is more accurate than the conventional minutiae-based methods.
Keywords: fingerprint images, core sub-region, log-polar mapping, discrete wavelet
frame transform, support vector machines
1. INTRODUCTION
For fingerprint images, there are two singularities – the core and delta points, and there are two prominent local ridge characteristics – ridge ending and ridge bifurcation (minutiae). The correspondence between core and delta points is the dominant informa-tion for fingerprint classificainforma-tion and minutiae are used for fingerprint matching. Most current recognition methods are based on minutiae matching. Minutiae-based fingerprint verification systems first extract the minutiae from fingerprint images. Then, verification is based on the correspondence of the two sets of minutiae locations. The approach pro-posed by Ross et al. [1] is capable of compensating for some of the nonlinear deforma-tions and is based on minutia point correspondences between pairs of fingerprint impres-sions.
Received April 3, 2007; revised October 4, 2007 & March 6, 2008; accepted April 3, 2008. Communicated by Tong-Yee Lee.
Chen et al. [2] used an average deformation model based on minutiae locations and orientations using 2-D Thin Plate Splines. Sha et al. [3] proposed a hybrid fingerprint matching scheme using both minutiae and Square-Tessellation-Fingercode. When com-pared with the template fingerprints, the corresponding Fingercodes are generated by interpolation and resampling on the extracted Fingercode according to the optimally es-timated mapping function with respect to the minutiae matching results. The main draw-back of the minutiae-based approach is the error propagation which occurs from the mi-nutiae extraction to the decision stage. In general, the extracted mimi-nutiae templates con-tain a number of false minutiae. Moreover, some minutiae will also be missed. This is especially the case when using bad-quality fingerprints. The heuristics do not catch all spurious minutiae and may reject some genuine minutiae. As a result, the decision stage has to compare two affected sets. In addition, instead of using global features a variant uses local cues such as a short ridge associated with the minutia [4]. However, this may lead to that minutia being associated with different ridges in different impressions of the same finger. Besides minutiae, researchers have also used other features for fingerprint matching. Jain et al. [5] and Ross et al. [6] presented a filter-based algorithm, which uses a bank of Gabor filters to capture both local and global details in a fingerprint as a com-pact fixed length Fingercode. The authors reported that the Fingercode-based system performs better than a state-of-the-art minutiae-based system when the performance re-quirement of the application system does not demand a very low false acceptance rate. Batra et al. [7] proposed a novel fingerprint classification method which uses a two stage classifier in which K-Nearest Neighbor acts as the first step and determines the two most frequently represented classes among the K nearest patterns, followed by the pertinent Support Vector Machines (SVMs) [8] classifier which chooses the most apt class of the two. Although Gabor filter based algorithms are reliable, the experiment shows that it spends a significant amount of effort in local orientation and frequency estimation from the filtered image, which is computationally expensive.
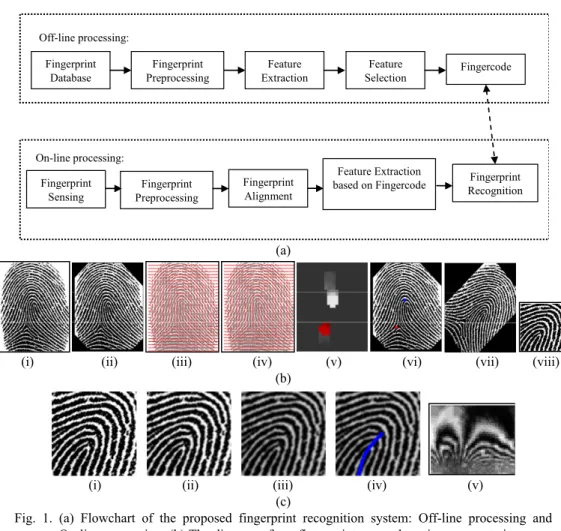
To implement a fast on-line fingerprint system with an adjustable security level, we propose the use of the fingerprint core sub-region to accelerate the identification process. The novelty of our framework comes from (1) the core-based method tolerates the trans-lation and slight scaling transformation presented in the captured image, (2) the idea of a feature alignment line minimizing the feature variations in the feature extraction stage, and (3) the derivation of an effective fitness function for the selection of a discriminative feature selection and threshold value. The overall block diagram of our system is shown in Fig. 1 (a). Our purpose is to capture fingerprint images using an inkless scanner and to identify them with stored features. It operates as follows:
Fast computation and reaction have been central to the development of on-line rec-ognition system. Our fast fingerprint recrec-ognition system is designed with special empha-sis on the above challenges. In order to overcome these problems, our system only needs a smaller fingerprint region than the conventional recognition methods, that is the area surrounding the core point, namely the fingerprint core sub-region which differs from the sub-region based on reference points with a priori knowledge of the complete fingerprint image presented by Chan et al. [9]. More specifically, genetic algorithms (GAs) [10] are used to achieve a near optimal selection of the feature subset from the core sub-region for recognition. The remainder of the paper is organized as follows: Section 2 presents fin-gerprint segmentation, orientation field estimation and singular point detection. While
Fingerprint Database Fingerprint Preprocessing Feature Extraction Feature Selection Fingercode Fingerprint
Sensing Preprocessing Fingerprint
Feature Extraction
based on Fingercode Recognition Fingerprint Off-line processing:
On-line processing:
Fingerprint Alignment
(a)
(i) (ii) (iii) (iv) (v) (vi) (vii) (viii) (b)
(i) (ii) (iii) (iv) (v) (c)
Fig. 1. (a) Flowchart of the proposed fingerprint recognition system: Off-line processing and On-line processing; (b) The diagram of our fingerprint core sub-region segmentation proc-ess: (i) Fingerprint input, (ii) Foreground and background segmentation, (iii) Orientation field estimation, (iv) Orientation field smoothing, (v) Singular region, (vi) Singular points, (vii) Fingerprint alignment, (viii) Core sub-region segmentation; (c) The diagram of log-polar mapping for feature extraction: (i) Core sub-region of fingerprint image, (ii) DWFT of LL-subband, (iii) Entropy filtering, (iv) Feature alignment, (v) Log-polar mapping. section 3 describes the feature extraction procedure, and section 4 details fingerprint classification and feature selection, section 5 provides experimental results addressing the receiver operating characteristic curve issues and comparison performance with pre-vious works. Section 6 concludes the paper.
2. CORE SUB-REGION SEGMENTATION
Fingerprint core sub-region segmentation (Fig. 1 (b)) mainly includes fingerprint foreground segmentation, orientation field estimation, singular point detection, and fin-gerprint alignment. The steps are briefly described below.
2.1 Foreground Segmentation
A captured fingerprint image (Fig. 1 (b-i)) usually consists of two components, which are called foreground and background. The task of the segmentation algorithm is to decide which part of the image belongs to foreground and which part to background. The main difference between foreground and background is their energy variation. The foreground is the pattern of ridges and valleys which has more energy variation than background. We use a 3 × 3 energy mask to get the energy image E(x, y) from the origi-nal image I(x, y) as follows:
1 1 2 1 1 1 ( , ) ( ( , ) ) . i j E x y I x i y j μ N=− =− =
∑ ∑
+ + − (1)The average pixel value of the 3 × 3 mask is μ and N = 9 is normalization constant. To extract the interested object from the background, the polygonal boundary of the fin-gerprint image can be obtained through adaptive thresholding the energy image along eight specifically designated angles {0°, 45°, 90°, 135°, 180°, 225°, 270°, 315°}. The initial threshold is set as mean of the energy image in this work, then the threshold value is gradually changed until the observed pixel-of-threshold (point) density of the whole image is around 50%-60% which is a considerably good representation for objects to be detected. Fig. 1 (b-ii) shows the segmentation result.
2.2 Orientation Field Estimation
The ridge orientation field is a map of local block orientation. A block orientation is defined as the most dominant of orientations of all the pixels in the block ℜ = w × w (w = 10), where ℜ is a neighboring region of the point (xi, yj) whose size is related with the
fingerprint frequency as displayed in Fig. 1 (b-iii). The setting of the block size is based on the fact that one inter-ridge distance unit corresponds in fingerprint frequency to ap-proximately 10 pixels and is independent to input image sizes [5]. Let the estimated ori-entation field be θ (xi, yj), and (Gx, Gy) is the local gradient vector at (xi, yj).We use the
least mean square algorithm to estimate θ(xi, yj) [11] as follows:
. ) ( 2 tan 2 1 ) , ( 1 2 2 ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − =
∑
∑
ℜ ℜ − y x y x j i G G G G y x θ (2)The resulting gradient image is smoothed by the use of a mean smoothing filter to give a coherence image as shown in Fig. 1 (b-iv).
2.3 Singular Point Detection
With the advancement in simplicity and robustness, we adapted the Poincare index [12] in our system to detect singular points (Figs. 1 (b-v) and (b-vi)). The Poincare index at pixel (x, y), which is enclosed by 12 direction fields taken in a counter-clockwise fash-ion, is calculated via Eq. (2) as follows:
1 0 1 Poincare( , ) ( ), 2 N k x y k π − = =
∑
Δ (3) where ( ), if | ( )| 2 ( ) ( ), if ( ) , 2 ( ), otherwise π δ k δ k π k π δ k δ k π δ k ⎧ < ⎪ ⎪ ⎪ Δ =⎨ + < − ⎪ ⎪ − ⎪⎩ (4) ( ) ( ( ), ( )) ( ( ), ( )), δ k =θ x k′ y k′ −θ x k y k (5) ( 1) mod , k′ = +k N (6) where (x(k′), y(k′)) and (x(k), y(k)) are the paired neighboring coordinates of the direction fields and δ(k) is calculated by using Eq. (2). A core point has a Poincare index with the value 1/2. On the contrary, the Poincare index is − 1/2 for a delta point. A core point that is defined as the point that has a maximum direction change and the ridges around the core point can represent the point on a fingerprint known as the core sub-region.2.4 Fingerprint Alignment
The process of automatic fingerprint matching is affected by nonlinear deformation introduced in the image during fingerprint recording [13]. In order to decrease false re-jection rates, we present a fingerprint alignment algorithm based on the average orienta-tion field within the core sub-region. According to the average orientaorienta-tion field of the core region below the horizontal axis, the open angle direction of the core flow can be calculated by , 1 , sin 2 1 tan , 2 cos 2 c i j i υ j y i j i υ θ φ θ − ∈ < ∈ =
∑
∑
(7)where θi,j is the local orientation at pixel (xi, yj) and υ is the core sub-region centered at
the core point (xc, yc) with a size of 100 × 100 pixels which was adopted to avoid possible
variability near the boundary while one is fingerprinted by the reader.After alignment we have Eq. (8), sin cos cos sin y x φ y φ x x φ y φ ′ = + ⎧ ⎨ ′ = − ⎩ (8)
the point (x, y) with its orientation angle φ will be mapped to the point (x′, y′) (Fig. 1 (b-vii)). The core sub-region is then segmented from the aligned image (Fig. 1 (b-viii)). Note that our core based method can tolerate from translation and slight scaling trans-formation, so only the rotation operation is performed.
image to improve system performance. On the other hand, ultrasound technology which can penetrate through different types of fingerprint dirt and residue could be used to make a comparison with a popular optical reader for real world applications.
REFERENCES
1. A. Ross, S. Dass, and A. K. Jain, “A deformable model for fingerprint matching,”
Pattern Recognition, Vol. 38, 2005, pp. 95-103.
2. Y. Chen, S. Dass, A. Ross, and A. K. Jain, “Fingerprint deformation models using minutiae locations and orientations,” in Proceedings of IEEE Workshop on
Applica-tions of Computer Vision, 2005, pp. 150-156.
3. L. Sha, F. Zho, and X. Tang, “Fingerprint matching using minutiae and interpola-tion- based square tessellation fingercode,” in Proceedings of IEEE International
Conference on Image Processing, 2005, pp. 41-44.
4. A. K. Jain, L. Hong, and R. Bolle, “On-line fingerprint verification,” IEEE
Transac-tions on Pattern Analysis and Machine Intelligence, Vol. 19, 1997, pp. 302-313.
5. A. K. Jain, S. Prabhakar, L. Hong, and S. Pankanti, “Filterbank-based fingerprint matching,” IEEE Transactions on Image Processing, Vol. 9, 2000, pp. 846-859. 6. A. Ross, A. K. Jain, and J. Reisman, “A hybrid fingerprint matcher,” in Proceedings
of IEEE 16th International Conference on Pattern Recognition, 2002, pp. 795-798.
7. D. Batra, G. Singhal, and S. Chaudhury, “Gabor filter based fingerprint classification using support vector machines,” in Proceedings of India Annual Conference, 2004, pp. 256-261.
8. C. J. C. Burges. “A tutorial on support vector machines for pattern recognition,”
Data Mining and Knowledge Discovery, Vol. 2, 1998, pp. 121-167.
9. K. C. Chan, Y. S. Moon, and P. S. Cheng, “Fast fingerprint verification using subre-gions of fingerprint images,”IEEE Transactions on Circuits and Systems for Video Technology, Vol. 14, 2004, pp. 95-101.
10. A. Jain and D. Zongker, “Feature selection: evaluation, application, and small sam-ple performance,” IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol. 19, 1997, pp. 153-158.
11. J. Zhou and J. Gu, “A model-based method for the computation of fingerprints’ orien-tation field,” IEEE Transactions on Image Processing, Vol. 13, 2004, pp. 821-835. 12. Q. Zhang and H. Yan, “Fingerprint classification based on extraction and analysis of
singularities and pseudo ridges,” Pattern Recognition, Vol. 37, 2004, pp. 2233-2243. 13. S. Dass and A. K. Jain, “Fingerprint classification using orientation field flow
curves,” in Proceedings of Indian Conference on Computer Vision, Graphics and
Image Processing, 2004, pp. 650-655.
14. M. Unser, “Texture classification and segmentation using wavelet frames,” IEEE
Transactions on Image Processing, Vol. 4, 1995, pp. 1549-1560.
15. D. Zheng, J. Zhao, and A. El Saddik, “RST-invariant digital image watermarking based on log-polar mapping and phase correlation,” IEEE Transactions on Circuits
and Systems for Video Technology, Vol. 13, 2003, pp. 753-765.
16. K. R. Müller, S. Mika, G. Rätsch, K. Tsuda, and B. Schölkopf, “An introduction to kernel-based learning algorithms,” IEEE Transactions on Neural Networks, Vol. 12,
2001, pp. 181-201.
17. K. Fukunaga, Introduction to Statistical Pattern Recognition, Academic Press, New York, 1990.
18. R. O. Duda, P. E. Hart, and D. G. Stork, Pattern Classification, 2nd ed., Wiley& Sons,New York, 2000.
19. http://www.secugen.com/.
20. http://bias.csr.unibo.it/fvc2000/databases.asp.
21. P. Pudil, J. Novovicova, and J. Kittler, “Floating search methods in feature selec-tion,” Pattern Recognition Letters, Vol. 15, 1995, pp. 1119-1125.
22. http://bias.csr.unibo.it/fvc2002/databases.asp.
Jing-Wein Wang (王敬文) received the B.S. and M.S. degrees in Electronic Engi-neering from National Taiwan University of Science and Technology, in 1986 and 1988, respectively, and the Ph.D. degree in Electrical Engineering from National Cheng Kung University, Taiwan, in 1998. From 1992 to 2000, he was a principal project leader at Equipment Design Center of PHILIPS, Taiwan. In 2000, he joined the faculty of National Kaohsiung University of Applied Sciences, where he is currently an associate professor and dean in the Institute of Photonics and Communications. His current research interests are combinatorial optimization, pattern recognition, wavelets and their applications.
Wen-Yuan Chen (陳文淵) was born in Taichung, Taiwan, in 1957. He received the B.S. and M.S. degrees in Electronic Engineering from National Taiwan University of Science and Technology in 1982 and 1984, respectively, and the Ph.D. degree in Electri-cal Engineering from National Cheng Kung University at Tainan, Taiwan, in 2003. Cur-rently, he is a professor and chair of the Department of Electronic Engineering at Na-tional Chin-Yi University of Technology. His research interests include digital signal processing, image compression, pattern recognition and watermarking.