行政院國家科學委員會專題研究計畫 成果報告
地下水位變動對油品滲漏監測之影響
研究成果報告(精簡版)
計 畫 類 別 : 個別型 計 畫 編 號 : NSC 100-2221-E-009-126- 執 行 期 間 : 100 年 08 月 01 日至 101 年 07 月 31 日 執 行 單 位 : 國立交通大學土木工程學系(所) 計 畫 主 持 人 : 單信瑜 計畫參與人員: 碩士班研究生-兼任助理人員:楊凱仁 碩士班研究生-兼任助理人員:江潤翰 碩士班研究生-兼任助理人員:王智緯 報 告 附 件 : 出席國際會議研究心得報告及發表論文 公 開 資 訊 : 本計畫可公開查詢中 華 民 國 101 年 08 月 27 日
中 文 摘 要 : 加油站地下儲槽滲漏的潛勢隨著使用齡期而提高。為了避免 油品滲漏導致其中的有毒物質污染土壤與地下水,必須針對 地下儲槽進行監測以及早預警。在監測方法中,土壤氣體監 測和地下水監測可以直接偵測地下儲槽洩漏出的物質。因洩 漏出的有機化合物由流動與擴散傳輸,故其傳輸路徑可能受 到地下儲槽與管線和地下水位升降的影響。再者,土壤氣體 監測和地下水監測的有效性也會因之而異。本研究以軟體 TMVOC 模擬儲槽洩漏以評估地下水位變動對監測效果的影 響。結果發現土壤透水係數(Kw)較高與孔隙率(n)較小時,由 於污染團傳輸速度較快,會提高測漏管的監測效率。且隨著 距離洩漏點越遠,效果越明顯。遲滯現象於變動水位模擬的 結果雖然有影響,其效果並沒有很明顯,可能是因為洩漏量 較少的緣故。本研究成功地以多相流傳輸模擬軟體 TMVOC 模 擬加油站儲槽與管線滲漏後,地下水位變動狀態下油品之純 相、溶解相、蒸汽相傳輸,並據以評估土壤氣體與地下水監 測之有效性。 中文關鍵詞: NAPL、地下儲槽、土壤氣體監測。
英 文 摘 要 : Among the leak detection methods for underground storage tanks (USTs), soil gas and groundwater monitoring detect the leaked product directly. The pathway of leaked gasoline flows and diffuses and thus, in turn the effectiveness of soil gas and groundwater monitoring, may be affected by the existence of USTs of gasoline station and the fluctuation of groundwater table such that the effectiveness of soil vapor and groundwater
monitoring is affected as a result. In this study, numerical simulation with the software TMVOC was performed in order to assess the effectiveness of soil vapor and groundwater monitoring. The results show that when the leakage occurs at a greater depth, both soil vapor and groundwater monitoring are less effective. Soil vapor monitoring can detect leakage earlier than groundwater monitoring in general; but groundwater monitoring is more effective when the distance from leakage increases. The VOC vapor and groundwater migrate faster when the hydraulic
conductivity is higher and porosity is smaller such that the monitoring is more effective. The influence of hysteresis of soil water characteristic curve on
the sensitivity of soil vapor and groundwater monitoring is also studied but was found insignificant.
英文關鍵詞: NAPL, underground storage tank, soil vapor monitoring.
1
行政院國家科學委員會補助專題研究計畫
■成果報告
□期中進度報告
地下水位變動對油品滲漏監測之影響
計畫類別:■個別型計畫 □整合型計畫
計畫編號:
NSC 100-2221-E-009 -126
執行期間: 100 年 8 月 1 日至 101 年 7 月 31 日
執行機構及系所:國立交通大學土木工程學系
計畫主持人:單信瑜
共同主持人:
計畫參與人員:楊凱仁、江潤翰、王智緯
成果報告類型(依經費核定清單規定繳交):■精簡報告 □完整報告
本計畫除繳交成果報告外,另須繳交以下出國心得報告:
□赴國外出差或研習心得報告
□赴大陸地區出差或研習心得報告
■出席國際學術會議心得報告
□國際合作研究計畫國外研究報告
處理方式:
除列管計畫及下列情形者外,得立即公開查詢
□涉及專利或其他智慧財產權,□一年□二年後可公開查詢
中 華 民 國 101 年 8 月 8 日
地下水位變動對油品滲漏監測之影響
NSC 100-2221-E-009 -126
精簡報告
摘要
加油站地下儲槽滲漏的潛勢隨著使用齡期而提高。為了避免油品滲漏導致其中的有毒物 質污染土壤與地下水,必須針對地下儲槽進行監測以及早預警。在監測方法中,土壤氣體監 測和地下水監測可以直接偵測地下儲槽洩漏出的物質。因洩漏出的有機化合物由流動與擴散 傳輸,故其傳輸路徑可能受到地下儲槽與管線和地下水位升降的影響。再者,土壤氣體監測 和地下水監測的有效性也會因之而異。本研究以軟體 TMVOC 模擬儲槽洩漏以評估地下水位 變動對監測效果的影響。結果發現土壤透水係數(Kw)較高與孔隙率(n)較小時,由於污染團傳 輸速度較快,會提高測漏管的監測效率。且隨著距離洩漏點越遠,效果越明顯。遲滯現象於 變動水位模擬的結果雖然有影響,其效果並沒有很明顯,可能是因為洩漏量較少的緣故。本 研究成功地以多相流傳輸模擬軟體 TMVOC 模擬加油站儲槽與管線滲漏後,地下水位變動狀 態下油品之純相、溶解相、蒸汽相傳輸,並據以評估土壤氣體與地下水監測之有效性。 關鍵字: NAPL、地下儲槽、土壤氣體監測。Abstract
Among the leak detection methods for underground storage tanks (USTs), soil gas and groundwater monitoring detect the leaked product directly. The pathway of leaked gasoline flows and diffuses and thus, in turn the effectiveness of soil gas and groundwater monitoring, may be affected by the existence of USTs of gasoline station and the fluctuation of groundwater table such that the effectiveness of soil vapor and groundwater monitoring is affected as a result. In this study, numerical simulation with the software TMVOC was performed in order to assess the effectiveness of soil vapor and groundwater monitoring. The results show that when the leakage occurs at a greater depth, both soil vapor and groundwater monitoring are less effective. Soil vapor monitoring can detect leakage earlier than groundwater monitoring in general; but groundwater monitoring is more effective when the distance from leakage increases. The VOC vapor and groundwater migrate faster when the hydraulic conductivity is higher and porosity is smaller such that the monitoring is more effective. The influence of hysteresis of soil water characteristic curve on the sensitivity of soil vapor and groundwater monitoring is also studied but was found insignificant.
1、前言
地下儲槽及管線,因材質發生銹蝕或老化 的材料受應力扭曲,極易造成破損洩漏。目 前台灣與世界各國加油站監測的方法雖以採 行多年,但是除了監測儀器本身的精確度經 過驗證之外,諸如土壤氣體監測、地下水監 測等監測成效和現場水文地質條件以及設施 配置緊密相關的方法,其可靠度均未經過詳 細之研究。雖然土壤氣體和地下水監測為成 本最低且最符合環境監測定義、且全台灣加 油站最普遍採用的監測方法,但其監測之有 效性卻是監測方法中可靠度最被質疑的。根 據資料顯示,國內近十餘年來許多被列為控 制場址的加油站,其土壤氣體監測的數據除 了極少數幾點超標導致污染被發現之外,大 多數並未顯示土壤氣體濃度異常。但經過本 團隊以 TMVOC 模擬,土壤氣體濃度應具有 足夠之靈敏度,不至於發生未偵測滲漏的狀 況。究其原因可能是受到地下水位變動的影 響,導致滲漏之油品因地下水位的升降而被 困在孔隙中,而且測漏管的效能也同時因地 下水位升降影響。 由於台灣地區地下水位季節性變動頗大, 在平原地區可達 2–3 m,在丘陵地區更可達 10 m 以上。在油品發生滲漏之後,當地下水 位變動時,在非飽和層中或浮動於地下水位 面之上的油品將殘留於非飽和層中或地下水 位面以下的孔隙中,使得土壤氣體監測和地 下水監測的效果受到影響。本研究將針對加 油站滲漏時土壤氣體與地下水監測之有效性 受地下水位變動的影響,以 TMVOC 模式模 擬加以評估。若模擬結果顯示土壤氣體監測 確實受到地下水位變動之嚴重影響,則將提 出較佳的監測配置與警戒值設定。2、文獻回顧
導致地下水位變化的原因有許多種,其中 包括來自於自然和人為現象的「非構造因子」, 及來自於地質活動和板塊運動的「構造因子」。 在非構造因子中的自然現象,包括:降雨、 大氣壓力、溫度、地下含水層分部及附近水 系的伏流、地潮、海潮、引力、季節變化等; 非構造因子中的人為現象,包括人為的抽取 與補注等,甚至於地下含水層附近地表負載 及震動都可能造成地下水位在井裏的振盪 (劉政,2005)。 地下水位產生變化在非構造因子中,以降 雨為最大的影響因子,其次為大氣壓力與潮 汐變化。但這些影響因子對地下水位變化的 影響,降雨會因區域性地質現象及含水層分 布,導致降雨入滲到含水層時,產生遲延的 現象。而大氣壓力與潮汐雖能直接影響水位 的變化,但都屬長週期的影響,通常需要 4 至 12 小時。Marinelli and Durnford (1996)記錄了四點 共同觀察現象,由現地的水文地質學家們 (hydrogeologists)使碳氫化合物洩漏並且提供 和地下水位升降相關的解釋: 1. 監測井可能不會有浮動 LNAPL,即使鄰 近的土壤裡已有不少碳氫化合物。這可 能發生在由於地下水位的起伏導致碳氫 化合物同時殘留於地下水位以上及以下 的土壤孔隙中。 2. 監測井中,浮動 LNAPL 的厚度隨著水 位上升而減少。當水位上升,油體受限 於土壤中,因此少許動態油體能夠進入 井中。 3. 在監測井中,LNAPL 可能會突然出現或 消失其中。水位突然上升可能會完全困 住碳氫化合物,結果使得監測井測不到 LNAPL。Brooks-Corey 模擬提出,在監 測井中累積任何 LNAPL 之前,就會有 一個最小量的浮動油體存在,當這個存 在的量超過一個定值,井中就會突然測 得 LNAPL 的存在。 4. 假設水位驟降至一個前所未有的點位, 則浮動的 LNAPL 可能會消失。碳氫化 合物可能通過土壤的速度變的緩慢,而 且其下降的速度並不如水位下降之快。 因此這系統便失去平衡,而移動油體明 顯的沒有足夠的時間到達新的平衡以及 到達監測井中。 在清除 LNAPL 洩降之後,動態的 LNAPL 在撇取井或溝槽中分離,然而,一個完整 LNAPL 的量會殘留在土壤中。揮發性的 LNAPL 可以透過土壤-蒸汽抽取法系統來分 離。然而,非揮發性的產物會留在土壤中。 此統計根據 LNAPL 的性質以及土壤的結構 紋理。土壤中的油體估計其保留容積範圍, 礫石約為 5L/m³、粉砂為 40 L/m3 (Testa and
Paczkowski, 1989)。許多碳氫化合物會因為土 壤中的細菌降解,特別是有氧的土壤。碳氫 化合物洩漏使用生物處理法,漫射氣體至土 壤中是最有效的系統。(Fetter, 1999) Lenhard et al. (1989)曾以數值模擬初步探 討 LNAPL 因地下水位變動而被困住的狀況。 之後 Lenhard et al. (1993)以實驗量測因地下 水位變動被困在孔隙中的 LNAPL。Ryan and Dhir (1996)探討殘留在孔隙中的 LNAPL 之 移動性與 Bond number 的關係。其基本概念 與毛細力數類似。只要水流夠快或毛細力可 降低,則 LNAPL 被困在孔隙中的機會較小。 Kamon et al. (2006)利用實驗室管柱試驗 模擬一維地下水位變化對苯分布之影響,並 以 NAPL Simulator 程式模擬。在修改程式碼 之後,NAPL Simulator 模擬地下水位變化後 苯的分布正確性較高。 陳培旼(2010)利用 TMVOC 模擬軟體探討 加油站滲漏監測的可靠度。結果顯示 TMVOC 模擬相當良好。整體而言地下水位 較高者(地表下 2 m)其土壤氣體與地下水體 含苯濃度之監測效果均優於地下水位較低者 (地表下 5 m)。但研究中對於污染團傳輸路徑 受到障礙物阻擋或洩漏點位置發生於油槽底 部而言,其整體之監測效果較不理想,建議 可以於油槽底部另外增設監測儀器以彌補監 測井之監測盲點。研究之結果中發現影響監 測井功效之主要控制因子為「洩漏點之位 置」。 液體在非飽和層(Vadoze Zone)中的流動 機制較在飽和土壤中複雜許多,如液體因毛 細現象運動(Capillary Movement),而使得排 水及出水之間上會有遲滯現象(Hysteresis), 即土壤水保持曲線上會有一遲滯區間 (Hysteresis Loop),使液體在非飽和層中模擬 及預測難度增加(單信瑜,張良正,2003)。此 外,土壤的乾縮(Shrinking)及膨脹(Swelling), 乾濕速率不同。孔隙表面的粗糙程度等都會 影響土壤遲滯效應 (Davidson et al., 1996; Demond and Roberts, 1991)。
在非飽和層中,因土壤水分會因乾燥、濕 潤交替歷程而產生遲滯現象,但大部分的研 究為避免複雜計算而忽略。但在入滲及蒸發 兩者交替的歷程是不能忽略(Royer and Vachaud, 1975),一般在土壤水分估計計算上, 多未能真實反應土壤水分變化情形,要準確 計算必須在乾燥、濕潤交替歷程中考慮遲滯 現象(Beese and van der Ploeg, 1976)。在排 水過程中,受到空氣進入值影響甚大,若土 壤含有較大空氣進入值時,在排水初期會有 基質水頭變化而含水量不變之情形,此現象 使得一般預測值在低負基質水頭會有高估含 水量現象。
3、研究方法
本研究將以 TMVOC 模擬加油站滲漏與 地下水位變動情形,完成網格之建立後再建 立不同深度之穩定地下水位狀態,最後於油 槽區內進行油品污染物洩漏之模擬,如圖 3-1 所示。 圖 3-1 研究架構與方法 本研究中,將忽略邊界效應之敏感度,使 用 120 m×120 m 研究模型(Case 1),尚增加 100 m×80 m 之模型(Case 2)。 表 3-1 邊界範圍說明 邊界範圍 模型尺寸 (m) 四周各 1 倍之方形為模擬區域 120×120 (case 1) 四周分長形為主要模擬區域 100×80 (case 2) 會影響未飽和層中地下水的流動與污染 物的傳輸之因數甚多,如:透水係數、土壤孔 隙率、土壤含水量、其他土壤參數等;而於 TMVOC 之操作界面中,土層之透水係數是以絕對滲透係數(Permeability, L2
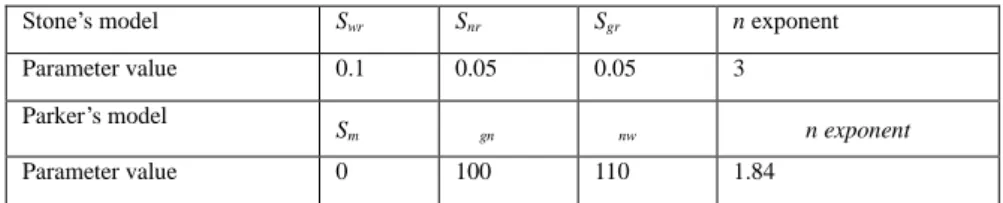
)表示之。相 關假設如表 3-2,地下水位於地表下 2 m。而 一般垂直透水係數約為水平透水係數之 1/5~1/100 間(Noonan and Curtis, 1990; Testa and Winegardner, 1991; Nyer, 1993; Domenico and Schwartz, 1998),因此垂直之絕對滲透係 數分別為 5.0×10-12 m2與 5.0×10-13 m2,土壤孔 隙率分別為 0.3、0.4,水力梯度均採 0.005。 表 3-2 土壤參數變化說明 絕對滲透係數 (m2) 透水係數 Kw (cm/sec) 孔隙率 2.5×10-11 2.74×10-2 0.4 2.5×10-12 2.74×10-3 2.5×10-12 2.74×10-3 0.3 本模擬場址是以中型加油站為參考場址 其站區範圍為:長 40 m、寬 40 m;而模擬深 度至地下 10 m。而為避免邊界效應因此將數 值模擬區域之四個邊界往外再延伸一倍模擬 範圍,每個模擬範圍長為 40 m,寬為 40 m, 整個數值模型尺寸長為 120 m、寬為 120 m 及 100 m 長、80 m 寬兩種。深度模擬至地下 10 m。並於 X 軸、Y 軸、Z 軸分割網格。於 主要模擬區內,油槽區之網格再細分:於 X 軸 與 Y 軸分割為 1 m/grid,Z 軸則為 0.5 m/grid。 土層之相對滲透率與三相系統之毛細壓 力曲線則參考 Kererat and Soralump (2010)之 研究模型,整理如表 3-3、表 3-4;土壤/水-汽油保持曲線,由毛細壓力曲線參數(表 3-4 ) 搭配 TMVOC 中之 Parker’s model 即可求得。
圖 3-2 加油站配置示意圖 圖 3-3 TMVOC 數值模擬之模型網格示意 圖(Case 2) 表 3-3 相對滲透係數參數(Stone’s model) 參數 材料 Swr Snr Sgr n exponent 大氣層 0.1 0.05 0.05 3 土壤 0.1 0.05 0.05 3 註: Swr為殘餘水相飽和度、Snr為殘餘 NAPL 相飽和度、 Sgr為殘餘汽相飽和度 表 3-4 毛細壓力曲線參數(Parker’s model) 參數 材料 Sm gn nw n exponent 大氣層 - - - - 土壤 0 100 110 1.84 土壤 (hystereesis) 0 450 450 1.6636 註: Sm為極限飽和度、gn為強度參數(氣-NAPL 相)、 nw為強度參數(NAPL-水相) 本加油站內之儲槽區假定設有儲油量為 55 公秉之儲油槽 4 個,其尺寸為直徑 3 m、 長度 8.2 m,埋設於地表下 1 m 處,符合規範 之油槽頂部距地表至少 0.6 m 之規定,而地 下水位部分則假設為在地表下 2 m、5 m 處。 在 TMVOC 中土層之邊界條件的假設可 以設為: Dirichlet Boundary Condition 即為定 水頭邊界與 Neuman Boundary Condition 即 為無通量(No Flow)邊界(Pruess and Battistelli, 2002)。
於本研究中之模擬區域由於假設水力梯 度為 0.005,且於模擬進行中時,上下游之水 頭須維持不變。因此將模擬區域之邊界設定 為定水頭邊界,而地表面則為大氣壓力邊界 (Atmospheric Pressure Boundary Condition), 並且假設地表無逕流。
由於需要於主要模擬區域中配置地下儲 油槽 4 個,然而 TMVOC 僅提供使用者於模
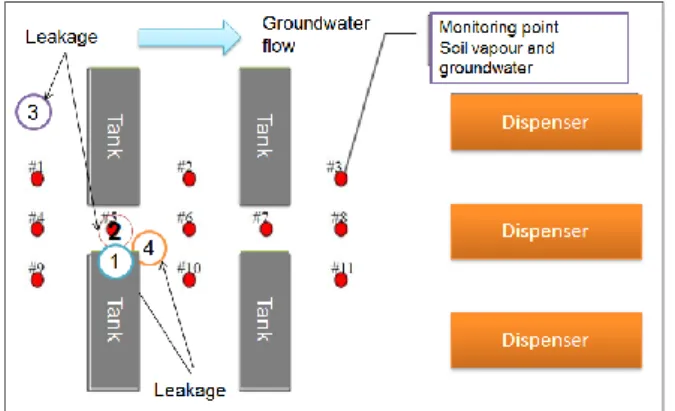
擬區域中改變土壤參數,並無法置入非土壤 材料。地下儲槽區之網格狀態設定為 Disabled 狀態,使得於模擬期間地下儲槽區之狀態維 持不變,以符合現實狀況中污染物無法滲入 地下儲槽。 為得到較密集之模擬資料以及為了減少 網格數與執行模擬所需之時間,因此將監測 井儘量靠近油品洩漏點以及縮小監測井間之 間距,因此採每一監測井間之間距為 3 m, 共設置 11 支監測井如圖 3-4。監測井的設置 深度,為顧及當地下水位於地表下 5 m 時, 仍能獲得不飽和層之氣體濃度與飽和層中之 水中濃度,因此設置深度達地表下 6 m。 圖 3-4 監測井與油槽之相關位置示意圖 本模擬總時間為 360 天(約 1 年計),水位 升降以半年為單位設定,每個 Case 起始水位 各有兩種,如 Case 1-1 水位設定為 0 至 180 天水位由地下 2 m 下降至地下 5 m,第 180 至 360 天水位再由地下 5 m 上升至地下 2 m(表 3-6)。Case 1-2 水位設定則由地下 5 m 開始模擬。Case 2 模擬方式如 Case 1,但是 水位設定只到地下 4 m。 表 3-5 地下水位設定 0 180 360 Case 1 2 5 2 Case 1 5 2 5 Case 2 2 4 2 Case 2 4 2 4 遲滯現象之模擬則在 Case 1、Case 2 中 各再增加一組模擬,來對照未加入遲滯現象 (H)的模擬情形。 表 3-6 加入遲滯現象之模擬(H 為遲滯現象) Time(days) 地下水位(-m) 0-180 180-360 Case 1 2 ─ 5 5 ─ 2 Case 1 2 ─ 5 5H ─ 2H Case 1 5 ─ 2 2 ─ 5 Case 1 5H ─ 2H 2 ─ 5 Case 2 2 ─ 4 4 ─ 2 Case 2 2 ─ 4 4H ─ 2H Case 2 4 ─ 2 2 ─ 4 Case 2 4H ─ 2H 2 ─ 4 表 3-7 汽油組成成份及百分比 汽油組成成份 成分 範例 百分比(%) 正烷類 MTBE 18 芳香族 苯 3.5 乙苯 5.5 甲苯 7 二甲苯 1.5 脂肪族 庚烷 20 異辛烷 20 環戊烷 24.5 一般加油站油品的洩漏約以 10 L/day ~ 100 L/day 不等的速率洩漏,而於美國規範中, 加油站之測漏管應能於 30 天內測得 150 加侖 之油品洩漏事件,即平均每天以 5 加侖之速 度洩漏(約為 19 L/Day);環保署(2006)於「加 油站防止污染地下水體設施及監測設備管理 辦法」中明訂對於偵測靈敏度要求須能達 0.2 gal/hr 之水準(即為 4.8 加侖/天)。因此於本研 究中原本均假設其油品之洩漏速率為 5 gal/day,但是由於軟體模擬時間過長,因此 在油品洩漏速率進行調整;並連續注入油品 (約 1 年)360 天。於本研究中在此假設 2 種不 同位置發生油品洩漏分別概述如下: Case 1:因發生鏽蝕、或外力造成破損 而產生油品洩漏,且於下游處受到油槽阻擋。 洩漏點於加油區內之輸油管線,距離入口之 地界線 21 m;與左側臨地之地界線距 14 m; 深度於地表下 1 m 處。 Case 2:因發生破損而產生油品洩漏。洩 漏點於儲油槽之底部,距離入口之地界線 23 m;與左側臨地之地界線距 15 m;深度於地 表下 4 m 處。 油品的洩漏速率分別為 1.35 gal/day (Case 1)、1.5 gal/day (Case 2),其注入模擬時 間達到 360 日(約 1 年),分別依照不同的地下 水位變化 ( 如 Case 1 之 2-5-2 m、5-2-5 m; 時 間 (day s) 地 下 水 位 (-m ) 案 例
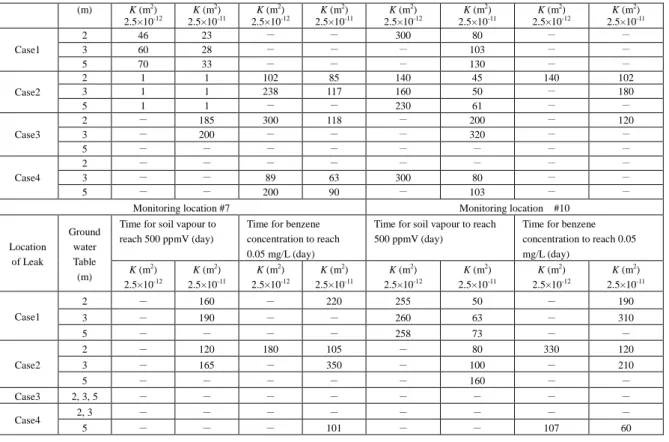
Case 2 之 2-4-2 m、4-2-4 m )、透水係數 (2.74×10-2、2.74×10-3 cm/sec)、孔隙率(n=0.3、 0.4)、及不同的洩漏點位置(Case 1─儲槽區內 之輸油管線、Case 2─儲油槽下方)、遲滯現 象的加入,來進行資料整理及分析。並以各 測漏管之網格資料分別篩選出不飽和層之平 均土壤氣體濃度(XGas )與溶解於地下水中之 苯溶解相濃度(XLiq) 。最後列出各監測井達 到規範中「有油氣污染滲漏之虞」之土壤氣 體濃度( 500 ppmV )時間及達第二類地下水 污染管制標準中苯含量達 0.05 mg/L 警戒值 之時間。模擬結果以 12 支監測井表示不同位 置氣相與地下水中 VOC 濃度,位置如圖 3-11, 其油品洩漏點附近之監測井中土壤氣體濃度 與地下水含苯濃度值其分別達到警示值之時 間與地下水位、透水係數間之關係統整於表 3-8。 圖 3-11 模擬示意圖 表 3-8 傳輸模擬之影響因子 洩漏速率 (gal/day) 1.35、1.5 洩漏點位置 儲槽區內管線、儲油槽下方 地下水位變化(m) 252、525、242、424 透水係數(cm/sec) 2.74×10-2、2.74×10-3 孔隙率(n) 0.3、0.4 遲滯現象 有、無
4、結果與討論
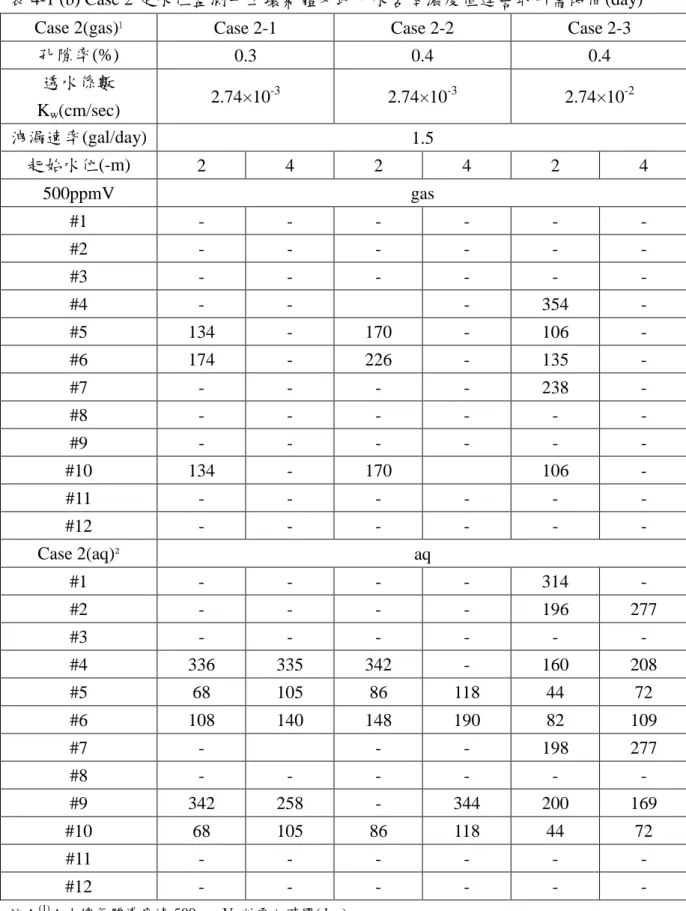
本研究以 TMVOC 模擬所得之各假設滲 漏情境下的測漏管中 VOC 濃度變化與地下 水中溶解相 VOC 濃度變化如圖 4-1 與 4-2 所 示。因所得出之類似圖甚多,因此僅以 Case 1-1 為例。 4.1 地下水位變動之影響 由圖 4-1 中可知當地下水位較低時(5-2-5) 測漏管的靈敏度(亦即特定時間 VOC 濃度) 較高。因此,由圖 4-1(a)與(b)比較可看出, 一開始地下水位較低者(5-2-5)測漏管中 VOC 濃度增加較快。當地下水位升降時,測 漏管中的 VOC 濃度也跟著改變,2-5-2 案例 中地下水位下降時測漏管中 VOC 增加速度 較快;5-2-5 案例中地下水位升高時,測漏管 中 VOC 濃度增加速率較慢。 (a) 地下水位 2-5-2 m (b) 地下水位 5-2-5 m 圖 4-1 Case 1-1(hysteresis)測漏管土壤氣體濃 度圖 圖 4-1 與 4-2 中的紅色水平線,代表固 定水位及變動水位下土壤氣體及地下水含苯 濃度達警戒值 500 ppnV 及 0.05 mg/L(ppm)。 由圖 4-2 中可看出,整體而言在若滲漏 發生在地下水位較高或較低時對早期監測井 中 VOC 濃度影響不大,但隨著油品逐漸下滲 至接觸到地下水位,則地下水位的位置和變 化趨勢就會造成影響。如圖 4-2(a)中水位逐 漸由地表下 5 m 回升至 2 m 過程中接觸油品 面積較大,監測井中的 VOC 濃度增加較快。 但在圖 4-2 (b)中,此時反而地下水位逐漸下 降,因此地下水與油品接觸面積較小,故下 游監測井中 VOC 濃度變化較為緩慢。(a) 地下水位 2-5-2 m (b) 地下水位 5-2-5 m 圖 4-2 Case 1-1 (hysteresis)監測井地下水體含 苯濃度圖 由於模擬的測漏管及監測井數量很多, 因此只選擇最具代表性或距離洩漏點較近的 土壤氣體測漏管或地下水監測井,較容易看 出變化者來說明。固定水位的情形下,測漏 管監測到土壤氣體濃度及地下水含苯濃度的 情形會比水位變動時的狀況來的好。 Case 1 分別位於上、下游的測漏管#4 與 #6,和洩漏點的距離皆為 3 m,由表 4-8 4-1 (a) Case 1-1 中,可以看出這兩支測漏管測到土 壤氣體濃度達 500 ppmV 警戒值之天數非常 皆近。於固定水位 2 m 下,Case 1-1 測漏管 #4 與#6 達到土壤氣體濃度值的門檻時皆為 29 天、Case 1-2 為 37 天,Case 1-3 為 26 天。 在變動水位 2-5-2 m 下,Case 1-1 之測漏管#4 與#6 達到警戒值標準時為 90 天、Case 1-2 為 117 天、Case 1-3 為 42 天。不論固定水位或 變動水位,有遲滯者皆與未加入遲滯者相同。 至於固定水位 5 m 監測時間 Case 1-1 為 51 天、 Case 1-2 為 59 天、Case 1-3 為 22 天;變動水 位 5-2-5 m 時,測漏管#4 的 Case 1-1、Case 1-2、 Case 1-3 監測達門檻時間分別為 85 天、110 天、57 天。有遲滯者為 92、144、53 天。測 漏管#6 在固定水位 5 m 為 Case 1-1 至 Case 1-3 分別為 85、135、57 天,有遲滯者為 94、 140、53 天。 由土壤氣體濃度的監測來看,水位固定 的情況下皆能較快速的偵測到土壤氣體濃度 超過標準值;水位有變動情形者,通常需要 花比較長的時間才能監測到土壤氣體濃度達 到警戒標準。 地下水中苯濃度的部分(表 4-1 (a)),於固 定水位的情形下,水位無論是在地下 2 m 或 5 m 時,地下水監測井偵測到水中苯濃度警 戒值的時間均相同。如水位在 2 m 時,Case 1-1 監測井#4 與#6 所花的時間為 35 天;Case 1-2 為 47 天,Case 1-3 為 30 天。固定水位在 5 m 時,Case 1-1 偵測時間為 44 天;Case 1-2 為 57 天;Case 1-3 為 55 天。變動水位下(表 4-2 (a))為 2-5-2 m 時,Case 1-1 的監測井#4 偵測到水中苯濃度達警戒值時間為 92 天; Case 1-2 為 125 天;Case 1-3 為 77 天。監測 井#6,Case 1-1 為 88 天;Case 1-2 為 120 天; Case 1-3 為 75 天。水位在 5-2-5 m 時,監測 井#4 偵測所需時間 Case 1-1 為 142 天;Case 1-2 為 140 天;Case 1-3 為 160 天。 比較地下水中含苯濃度的狀況,Case 1-1 固定水位 2 m 與變動水位 2-5-2 m 相比(表 4-1 (a)、4-2 (a)),2 m 達 0.05 mg/L(ppm)的測定 標準所需要的時間為 35 天,2-5-2 m 為 92 天, 相差 57 天;固定水位 5 m 與變動水位 5-2-5 m 為 44 天及 142 天,相差 98 天。Case 1-2 固 定水位 2 m 為 47 天,變動水位 2-5-2 m 為 125 天,相差 78 天;5 m 與 5-2-5 m 為 57 天及 140 天,相差 93 天。Case 1-3,2 m 與 2-5-2 m 分別為 30 天與 77 天,相差 47 天;5 m 與 5-2-5 m 為 55 與 160 天,相差 95 天。其分析結果 與土壤氣體濃度的測定狀況相同,地下水中 含苯濃度的測定值,達到警戒標準的時間依 然是固定水位的時候比變動水位要快的許多, 差異較大甚至達到 3 個月之久,水位變動確 實使得監測井偵測濃度時間增加的情形。
表 4-1 (a) Case 1 定水位監測井土壤氣體及地下水含苯濃度值達警戒所需時間(day)
Case 1(gas)¹ Case 1-1 Case 1-2 Case 1-3
孔隙率(%) 0.3 0.4 0.4 透水係數 Kw(cm/sec) 2.74×10-3 2.74×10-3 2.74×10-2 洩漏速率(gal/day) 1.35 起始水位(-m) 2 5 2 5 2 5 500ppmV gas #1 91 182 119 167 77 64 #2 91 182 119 167 77 66 #3 - - - - 253 - #4 29 51 37 59 26 22 #5 0.03 0.03 0.03 0.03 0.03 0.03 #6 29 51 37 59 26 22 #7 131 311 170 - 110 82 #8 310 - - - 181 180 #9 91 193 119 167 79 64 #10 91 182 119 167 77 66 #11 - - - - 217 - #12 - - - - 311 - Case 1(aq)² aq #1 96 114 129 147 73 93 #2 96 114 129 147 73 - #3 - - - 73 275 #4 35 44 47 57 30 55 #5 2 9 3 11 11 33 #6 35 44 47 57 30 55 #7 141 176 189 235 100 33 #8 319 - - 203 240 #9 96 114 129 147 72 93 #10 96 114 129 147 73 93 #11 - - - - 293 275 #12 - - - - 註:(1):土壤氣體濃度達 500ppmV 所需之時間(day) 註:(2):地下水含苯濃度達 0.05 mg/L 所需之時間(day)
表 4-1 (b) Case 2 定水位監測井土壤氣體及地下水含苯濃度值達警戒所需時間(day)
Case 2(gas)¹ Case 2-1 Case 2-2 Case 2-3
孔隙率(%) 0.3 0.4 0.4 透水係數 Kw(cm/sec) 2.74×10-3 2.74×10-3 2.74×10-2 洩漏速率(gal/day) 1.5 起始水位(-m) 2 4 2 4 2 4 500ppmV gas #1 - - - - #2 - - - - #3 - - - - #4 - - - 354 - #5 134 - 170 - 106 - #6 174 - 226 - 135 - #7 - - - - 238 - #8 - - - - #9 - - - - #10 134 - 170 106 - #11 - - - - #12 - - - - Case 2(aq)² aq #1 - - - - 314 - #2 - - - - 196 277 #3 - - - - #4 336 335 342 - 160 208 #5 68 105 86 118 44 72 #6 108 140 148 190 82 109 #7 - - - 198 277 #8 - - - - #9 342 258 - 344 200 169 #10 68 105 86 118 44 72 #11 - - - - #12 - - - - 註:(1):土壤氣體濃度達 500ppmV 所需之時間(day) 註:(2):地下水含苯濃度達 0.05 mg/L 所需之時間(day)
表 4-2 (a) Case 1 變水位監測井土壤氣體及地下水含苯濃度值達警戒所需時間(day)
Case 1(gas)¹ Case 1-1 Case 1-2 Case 1-3
孔隙率(%) 0.3 0.4 0.4 透水係數 Kw(cm/sec) 2.74×10-3 2.74×10-3 2.74×10-2 洩漏速率(gal/day) 1.35 起始水位(-m) 252 525 252 525 252 525 是否含遲滯現象 H H H H H H #1 268 270 105 105 225 154 #2 268 270 108 108 225 159 #3 108 #4 7 7 7 1 27 27 14 115 1 1 11 1 #5 1 1 1 1 1 1 1 1 1 1 1 1 #6 7 7 7 1 27 27 16 138 1 1 12 1 #7 207 209 258 #8 #9 254 270 105 105 225 154 #10 255 270 108 108 225 159 #11 #12 Case 1(aq)² 是否含遲滯現象 H H H H H H #1 257 264 231 322 306 252 252 236 198 #2 265 268 241 343 310 327 154 149 253 217 #3 151 148 #4 5 5 5 9 35 35 50 50 73 73 160 153 #5 1 1 1 1 1 1 1 1 42 42 109 102 #6 2 2 26 27 39 39 50 50 73 73 163 158 #7 349 173 173 298 289 #8 194 197 #9 257 264 301 305 154 149 236 196 #10 265 267 309 325 151 148 255 215 #11 #12 註:(1):土壤氣體濃度達 500ppmV 所需之時間(day) 註:(2):地下水含苯濃度達 0.05 mg/L 所需之時間(day)
表 4-2 (b) Case 2 變水位監測井土壤氣體及地下水含苯濃度值達警戒所需時間(day)
Case 2(gas)¹ Case 2-1 Case 2-2 Case 2-3
孔隙率(%) 0.3 0.4 0.4 透水係數 Kw(cm/sec) 2.74×10-3 2.74×10-3 2.74×10-2 洩漏速率(gal/day) 1.50 起始水位(-m) 242 424 242 424 242 424 是否含遲滯現象 H H H H H H #1 315 309 #2 277 274 #3 #4 335 356 271 269 #5 280 247 142 146 280 276 171 171 260 253 159 159 #6 302 256 259 163 263 256 169 169 #7 277 274 #8 339 331 #9 305 331 360 360 289 285 #10 280 273 142 146 280 276 171 171 259 252 160 160 #11 #12 Case 2(aq)² 是否含遲滯現象 H H H H H H #1 337 #2 247 231 #3 #4 267 267 315 317 360 336 231 231 185 142 #5 70 70 55 58 91 91 72 76 55 55 72 80 #6 109 109 109 99 137 137 138 138 81 81 72 80 #7 242 216 #8 #9 251 251 157 162 261 257 336 278 229 229 78 85 #10 68 68 57 60 87 87 72 76 52 52 72 80 #11 #12 註:(1):土壤氣體濃度達 500ppmV 所需之時間(day) 註:(2):地下水含苯濃度達 0.05 mg/L 所需之時間(day)
Case 2 固定水位及變動水位於的部分[表 4-1 (b)、4-2 (b)],固定水位 2 m 下,測漏管 #5 偵測到土壤氣體濃度於 Case 2-1 需要 134 天、Case 2-2 需 170 天、Case 2-3 需 106 天; 變動水位 2-4-2 m 在 Case 2-1、Case 2-2 及 Case 2-3 則需要 70 天、91 天及 55 天,分別 相差 64 天、89 天與 51 天。測漏管#10 相對 於洩漏點的位置對稱於測漏管#5,因此偵測 到土壤氣體濃度所花的時間和測漏管#5 相同。 位置稍為較遠一點的測漏管#6 偵測到氣體濃 度達到 500 ppmV 警戒標準的時間,於固定 水位 2 m 時,Case 2-1 為 174 天與 Case 2-3 為 241 天;變動水位 2-4-2 m 則只有 Case 2-1 與 Case 2-3 偵測到濃度時間為 302 天及 263 天,與固定水位 2 m 監測相差 128 天和 37 天。 Case 2 中偵測土壤氣體濃度的情形和 Case 1 相似,雖然偵測所花的時間皆比 Case 1 久, 不過固定水位偵測土壤氣體濃度的狀況依舊 比變動水位來的穩定。土壤氣體監測在固定 水位 4 m 的時候,因為污染物的洩漏點較低 (位於水面以下)加上水位沒有變化,因此測漏 管無法偵測到儲油槽下方洩漏的污染物。變 動的水位 4-2-4 m 則在 0~180 天的時候由上 升的水位逐漸地將污染團往上帶起因此 Case 2-1、Case 2-2 與 Case 2-3 仍然能夠偵測到土 壤氣體濃度,所需要的時間分別為 142、171 與 160 天。 綜合 Case 1 與 Case 2 來說,固定水位下 由於 Case 2 的洩漏位置比 Case 1 來的要低, 因此 Case 2 中設置的測漏管與監測井即使離 洩漏點距離較近,要偵測到污染濃度還是要 花比較多的時間。甚至 Case 2 固定水位 4 m 無法測到土壤氣體濃度,固定水位 2 m 最快 如 Case 2-3 也要 3 個月後才能偵測到土壤氣 體濃度。另外,變動水位時的測漏管無論是 在 Case 1 或 Case 2 監測效果都不是很理想, 而且洩漏點若是在水位以下將很難被偵測到。 但是就 Case 2 而言,固定水位 4 m 原本沒辦 法測到土壤氣體濃度,反而是由於 4-2-4 m 水 位上升的情形,讓污染物有機會向上擴散, 使得測漏管能夠偵測到土壤氣體的濃度。至 於其它因為濃度不夠抑或受孔隙率或透水係 數的影響監測效果的評估,會於 4.2、4.3 小 節來分析。 Case 1,Case 2 中距離較遠的測漏管,固 定水位下由於 Case 1 洩漏點的位置位於油槽 上方的輸油管線,在測漏管與監測井#5 中, 其次井#1、#2、#9、#10 和測漏管#5 的距離 皆相同,使得這 4 支井在定水位下無論是測 定氣體濃度或地下水中含苯濃度時間都相同。 井#3、#8 與#11 則因為在下游,雖然還是可 以測到,不過幾乎都已經超過 5 個月以上甚 至半年之久。而 Case 2 則因為洩漏點的位置 在儲油槽的下方,靠近下游處且距離約在井 #5 與井#10 之間使其呈對稱,使得這兩支井 偵測到土壤氣體與苯濃度達到警戒值的時間 完全相同。但是在較遠的井#1、#2、#9 即使 在達到警戒標準時也已經花了很長的時間; 井#3、#8 由於模擬的洩漏量較少且距離較遠, 無法測到濃度。井#12 位於本模擬場址所設 置的最下游處,無論是 Case 1 及 Case 2 皆因 距離洩漏點太遠導致在一年之內無法測得任 何有效濃度。變動水位下 Case 1、Case 2 (表 4-2 (a)、4-2 (b)),無論是土壤氣體濃度或地 下水中含苯濃度監測時間都需要花比固定水 位還要多一倍的時間,而且皆超過半年以上。 不過 Case 2 於地下水含苯濃度的監測效率和 固定水位非常皆近,因此也不能由單一情形 推斷監測井的監測效果而下定論。 4.2 土層透水係數之影響 本模擬中對土層透水係數 Kw=2.74×10-3 (cm/sec)、Kw=2.74×10-2 (cm/sec)兩者相差 10 倍於洩漏的影響,分別以固定水位下以及變 動水位下 Case 1-2 (Kw小)、Case 1-3 (Kw大) 與 Case 2-2 (Kw小)、Case 2-3 (Kw大)來進行 說明。 固定水位就 Case 1 之井#4 與#6 可以看出 差異,透水係數較高者其測漏管監測效率較 高,能比較快速偵測到土壤氣體濃度達到警 戒值。於 2 m (表 4-1(a)),Case 1-2 (Kw小)、 Case 1-3 (Kw 大)偵測到土壤氣體濃度 500 ppmV 的時間分別為 37 天與 26 天,相差 11 天。較遠的測漏管如#1、#2、#9 與#10 濃度 達到警戒的監測時間,當 Kw 小需要 119 天, Kw 大則為 77~79 天,相差約 40 天。最遠且 有偵測到濃度的測漏管#7 則差了 60 天。 地下水含苯濃度就監測井#4 與#6 來比較, Case 1-2 (Kw大)的時候偵測達 0.05 mg/L 的警 戒標準值需要 47 天的時間,但 Case 1-3 (Kw 大)則只要 30 天就可以偵測到,相差 17 天。 較遠的井#1、#2、#9 與#10 當 Kw較小時所需
要的監測時間皆為 129 天;Kw大則只要花 73 天,相差 56 天。整體來說兩種污染濃度的偵 測時間差異不會太大,但是 Kw大者偵測效果 較好。固定水位在 5 m 時,同樣監測井的位 置相較於 2 m。則不同透水係數影響更明顯。 井#4 與#6 當 Kw較小時,偵測需要 59 天; Kw大時則在 22 天就能偵測到,兩者相差 37 天。較遠的測監測井#1、#2、#9、#10,Kw 小與 Kw 大時監測到濃度的天數分別為 167 天及 65 天,相差達 100 天之久。地下水含苯 濃度差距比較小,當 Kw較小時,井#4 與#6 測得濃度時間為 57 天;Kw較大時則需要 55 天,只有相差兩天。不過較遠的監測井仍舊 是 Kw較大的其偵測效果較好,快了 54 天。 Case 2 中固定水位 2 m 只有測漏管#5、 #6 與#10 測得濃度,Case 2-2 (Kw小)所偵測 到土壤氣體濃度的時間分別為 170、226、170 天;Case2-3 (Kw大)所花的時間為 106、135、 106 天,相差 64、91、64 天。地下水含苯濃 度測於 2 m (Kw較小)時,監測井#5 與#10 的 監測時間為 86 天;Kw較大為 44 天。較遠的 監測井#6 與#4,Kw較小的時候為 148、342 天;Kw較大為 82、160 天,相差 66、182 天。 固定水位於 4 m 時偵測的苯濃度於較小的 Kw 時,監測井#5 與#10 需要時間為 118 天;Kw 較大需要時間為 72 天。較遠的監測井#6 與 #9 於 Kw較小監測時間為 190 天;Kw較大需 要 109 天,相差 81 天。 整體來說透水係數(Kw)提高 10 倍時,固 定水位 2 m 距離洩漏點較近(3 m)的測漏管測 得土壤氣體達污染標準的時間減少 1.4 倍, 較遠的( 6 m ) 則減少 1.5 倍;於固定水位 5 m 時,由近而遠為減少 2.7 倍與 2.6 倍。Case 2 於固定水位 2 m 時約減少 1.6 倍。至於地下 水含苯濃度 Case 1 固定水位 2 m 由近而遠依 序為 1.6 至 1.9 倍;5 m 為 1 倍至 1.6 倍。Case 2 固定水位 2 m 距離洩漏點的測漏管由近而 遠所花的時間縮短皆 2 倍;4 m 則為 1.6、1.7、 2 倍。 變動水位 Case 1-2 (表 4-2(a)),Kw小時測 漏管#4 與#6 在 2-5-2 m 需要花 117 天才能偵 測達到 500 ppmV 的土壤氣體濃度值;Kw大 時 Case 1-3 為 41 天。當 Case 1-2 在 5-2-2 m 時,#4 與#6 分別為 110 天與 135 天可測得; Case 1-3 皆為 57 天。地下水含苯濃度於 Kw 較小的 Case 1-2 之#4 與#6 測得 0.05 mg/L 天 數為 125 及 120 天;Kw較大的 Case 1-3 則分 別需要 77 天及 75 天。較遠的測漏管#1、#2、 #9、#10 於 Kw較小的時候需要 300 天以上才 能測得超標的污染物;Kw較大則分別於大約 150~250 天可測得污染物。 Case 2-2 (Kw較小)與 Case 2-3 (Kw較大) 的比較,土壤氣體濃度由測漏管#5 與#10 來 看,水位 2-4-2 m 時 Kw小需要 280 天;Kw 較大需要 260 天。以 4-2-4 m,Kw較小需要 171 天 Kw較大需要 160 天。地下水含苯濃度 於較近的測漏管(#5 與#10)差異並不大,但是 距離較遠的測漏管(#4 與#9)則 Case 2-3 (Kw 較大)偵測到苯濃度的速度比 Case 2-2 (Kw較 小)快上許多。 綜合分析就固定水位而言,高水位、低 水位分開比較,不論測漏管與監測井偵測為 土壤氣體濃度或是地下水含苯濃度,皆透水 係數(Kw)大者有助於測漏管監測的效率。且 離洩漏點越遠者,影響愈大。這情況於 Case 1 與 Case 2 的結果均相同,且當 Kw增加 10 倍,則固定水位偵測土壤氣體濃度的時間約 可縮短 1.4~2.7 倍;地下水含苯濃度的偵測時 間約可縮短 1.6~2 倍。 若 是 由 變 動 水 位 來 看 , Case 1-3 (Kw 大)(表 4-2 (a))之 2-5-2 m 比起 Case 1-2 (Kw小) 快了 76 天就測得土壤氣體濃度達到 500 ppmV 的門檻,少了將近 3 倍的時間;5-2-5 m 同樣也快了 2.6 倍左右。Case 1-3 (Kw大)在時 間則比 Case 2-2 (Kw小)快了 20 至 80 天不等, 平均約減少 1.1 倍的時間。但地下水含苯濃 度到達警戒值的時間卻不必然受透水係數 Kw值的影響。監測苯濃度的部分,Case 1 於 5-2-5 m 的狀況除了監測井#6 之外,監測井 #4 不受到透水係數影響(表 4-2 (a)),反而是 透水係數較低的比較快到達警戒值門檻,於 Case 2 的 4-2-4 m (表 4-2 (b))也有此現象,因 此可以發現透水係數對於土壤氣體濃度影響 較大,於地下水含苯濃度卻不一定受透水係 數大小影響監測的時間。 另外,監測井距離洩漏點的遠近也不一 定和監測井監測到警戒濃度的時間成正比, 意即即使較遠的測漏管雖然透水係數較高, 但偵測到濃度達警戒值的時間並不會差太多。 相較於固定水位,變動水位於偵測地下水含 苯濃度得效果並沒有很好。於本小節還可以 用其他角度來檢視透水係數於變動水位的監
測效果。同樣就 Case 1 的三個案例來看(表 4-2 (a)),相同的透水係數於 2-5-2 m 或 5-2-5 m 這兩種情形,起始水位高低對於測漏管的 監測效果影響不同(Case 2 也是如此)。意即同 樣水位於第下 2 m~5 m 或地下 2 m~4 m,透 水係數相同時,起始水位初始設定位置會影 響偵測結果。 因此就透水係數而言,時間拉長以後能 夠明顯的看出差異性。所以透水係數的影響 大概可以歸類成下列幾點: 1. 固定水位下的測漏管的監測無論是對於 土壤氣體濃度或者地下水含苯濃度皆可 看出監測效果的差異性非常明顯。透水 係數較大者,測漏管監測的效果較好。 2. 變動水位下測漏管監測土壤氣體濃度仍 然是透水係數較高者,其監測效果較好; 但是監測地下水含苯濃度時,透水係數 大小不影響監測效果。 3. 變動水位模擬時設定的初始水位對監測 的效果有一定影響。 4.3 土壤孔隙率之影響 固定水位下於模擬時間結束(一年)後輸 出各測漏管之監測值並比較土壤孔隙率之影 響。由 Case 1-1 (孔隙率 n=0.3)、Case 1-2 (n=0.4)進行比較結果如表 4-1 與 4-2。 於固定水位土壤氣體監測結果,與透水 係數相同的情形下來比較發現孔隙率較小 (n=0.3)者,達到 500 ppmV 濃度的監測門檻 速度較快。固定水位 2 m 下 Case 1-1 (n 小) 與 Case 1-2 (n 大)比較測漏管#4 與#6,孔隙 率小偵測時間為 29 天;孔隙率大者需要 37 天,相差 8 天。於固定水位 5 m 則孔隙率小 需要 51 天,孔隙率大需要 59 天,相差 8 天。 地下水含苯濃度於 2 m 情形下,測漏管#4 與 #6 在孔隙率較小時需要 35 天;孔隙率較大 需要 47 天,相差 12 天。5 m 情形下,孔隙 率小為 44 天;孔隙率大為 57 天,相差 13 天。 Case 2-1 (表 4-1 (b)),土壤氣體濃度於 2 m 時, 測漏管#5 與#6 於孔隙率較小偵測到濃度需 要的時間為 134 與 174 天;孔隙率較大的需 要 170 天與 226 天;分別相差 36 天與 52 天 (#10 與#5 相同)。地下水含苯濃度於 Case 2 固定水位 2 m 時,測漏管#5 與#6 於孔隙率小 需要 68 天及 108 天;孔隙率較大者需要 86 天及 148 天,相差 18 天及 40 天。4 m 時測 漏管#5 與#6 於孔隙率較小需要 105 天及 140 天;孔隙率較大者需要 118 天及 190 天,相 差 13 天及 50 天。變動水位於 Case 1 及 Case 2 的案例皆整理於表 4-3,相較於固定水位時 的情形,變動水位於孔隙率較小時,其監測 的效果比較好。 表 4-3 土壤孔隙率於變動水位監測土壤氣 體與水中含苯濃度情形(days) Case1-1 Case1-2 2-5-2(m) 相差天 數 Case1-1 Case1-2 5-2-5(m) 相差天 數 0.3(A) 0.4(B) (B)-(A) 0.3(A) 0.4(B) (B)-(A) #4、 #6(gas) 90 117 27 85 110 25 #4、 #6(aq) 92 125 33 142 140 -2 案例 水位 Case2-1 Case2-2 2-4-2(m) Case2-1 Case2-2 4-2-4(m) #5 #10(gas) 280 280 0 142 171 29 #5、 #10(aq) 70 91 21 55 72 17 #6(aq) 109 137 28 109 138 29 #9(aq) 251 261 10 157 336 179 變動水位的部分如表 4-3,Case 1-1 (孔隙率 小),2-5-2 m 下土壤氣體濃度以測漏管#4 與 #6 偵測所花的時間為 90 天;Case 1-2 (孔隙 率大)偵測濃度的時間為 117 天,相差 27 天。 5-2-5 m 的情形下,Case 1 (孔隙率小),測漏 管#4 與#6 同為 85 天到達氣體濃度門檻;Case 1-2(孔隙率大)則花了 110 天才測到污染物濃 度,相差 25 天。Case 2-1 (孔隙率小)與 Case 2-2(孔隙率大)變動水位 2-4-2 m 之測漏管#5 與#10 則是花了 280 天達到警戒值,但是 Case 2-2 與 Case 2-1 模擬時間相同。離洩漏點較遠 的測漏管監測均是孔隙小偵測到土壤氣體濃 度的時間較快。至於在地下水含苯濃度情形 的測定,於表 4-3 可見,變動水位於 5-2-5 m 時,孔隙率大小並沒有影響到測漏管偵測的 時間,可能是模擬的誤差。因為於 Case 2-1 與 Case 2-2 仍然是孔隙率較小的監測效果較 好。 由平流傳輸速率之公式 i n k v e x (式中 vx 為平均線性速度、k 為水力傳導係數、i 為水 力梯度、ne為有效孔隙率)可知,當所有條件 皆相同之情況下則傳輸速率約略與孔隙率之 大小成反比。且考慮污染團在擴散的傳輸機 案 例 n 監 測 點
制下,當孔隙率較小則會使得液相污染團較 容易充滿孔隙,因而流速增加而傳輸速率也 會提高。 因此不論是固定水位或者是變動水位,仍 然可以判定土壤孔隙率的大小對於污染物傳 輸模擬監測的效果仍有影響,且在水位變動 的情形下一致性非常高,當孔隙比較小的時 候,容易被水或污染物充滿,飽和時間比較 短會導致水流的速度加快,同時污染物的擴 散速度也會增加。而土壤孔隙率對於污染團 傳輸速率之影響亦會隨著距離之增加而更為 顯著由結果可得出孔隙率小對於污染團傳輸 有較大幫助之結論。最後以透水係數與孔隙 率之敏感度分析結果比較可知,變動透水係 數相較於變動孔隙率而言對於污染團傳輸之 影響較大也較為敏感。 4.4 遲滯現象模擬結果 遲滯現象加入模擬的結果如表 4-1,就 土壤氣體濃度而言,Case 1 中,變動水位 2-5-2 m 下由較近的測漏管#4 與#6 來看,加入遲滯 現象和未加入的模擬結果相同,因此看不出 變化的情形。不過若是由較遠的測漏管,如 Case 1-1 至 Case 1-3 的#1、#2 則只有相差 2 天;在#9 與#10 則有相差 16 天。但若是以起 始水位較低的 5-2-5 m 來看,水位上升時加 入了遲滯現象導致一開始模擬的條件就不同, 因此偵測到土壤氣體濃度達警戒標準的時間 變的不一樣,但是差異也沒有特別明顯。 Case1-1,2-5-2 m,也就是水位由高降低的時 候,土壤開始排水,到了 180 天後,水位由 地下 5 m 低水位開始上升,此時的有加入遲 滯現象的模擬導致殘留於水面下的 LNAPL 比較多,所以氣體濃度會變的比較少,導致 偵測到濃度的速度稍為慢一些。這樣的情形 於 Case 1-1、Case 1-2 的 5-2-5 m 也能夠看的 出來。5-2-5 m 一開始便由低水位開始上升, 因此屬於吸水狀態,而在土壤濕潤時濕相液 體(水)會取代非濕相液體(空氣或有機液體), 同時也牽引著非濕相液體,使得 LNAPL 或 土壤氣體沒辦法往上擴散,因此在模擬天數 達 180 天之前,測漏管#4 及#6 皆已偵測到土 壤氣體的濃度,只是有加入遲滯現象所需要 偵測到的時間較長。至於 Case 1-3 的 5-2-5 m 反而是有遲滯現象模擬速度較快,則是因為 有遲滯現象時,空氣孔隙較大,導致氣體飽 和度較高,因此土壤氣體濃度較快被偵測 到。 Case 1-2 於 5-2-5 m 的比較可發現測漏 管#4 與#6,水位由 180 天開始下降後,此時 土壤氣體濃度也會隨之減少。但是有遲滯者 其土壤測漏管裡濃度卻不斷上升,是因為受 到遲滯的影響導致土壤中的汽氣體濃度下降 少,在非飽和層(地下水位以上),水飽和度都 較無遲滯者少,因此含空氣孔隙較多,固定 體積土壤中油氣總量高,則油氣濃度高。 Case 1-3 於 5-2-5 m 時,土壤氣體測漏 管#4、#6 與#7 在 180 天水位開始下降時,濃 度曲線卻在第 270 天時達 peak 值後開始減少, 雖然擴散濃度增加,但是由於水位降低的效 果較大,所以土壤氣體濃度有下降的趨勢, 而有遲滯者在 180 天至 270 天中可看出曲線 的差異,有遲滯者上升濃度較緩慢。 而 Case 2-1 模擬的結果不同於 Case 1-1, 由於洩漏點一開始的位置就不一樣,Case 2-1 的洩漏點位於儲油槽底部導致模擬結果的差 異。較近的測漏管如#5、#10 與、#6,加入 遲滯現象監測時間較快,不過#4 與#9 則相反。 但可以確定的是偵測到濃度的時間都在 180 天之後,也表示水位由高(地下 2 m)往下降(地 下 4 m)的時候屬於排水狀態,水位回升的時 候遲滯現象的模擬有不同的結果。比較近的 測漏管偵測的時間較快仍舊是因為有遲滯現 象時,於土壤中氣體孔隙率較大,因此滲透 較快,使得有遲滯現象時能夠較快偵測到土 壤氣體濃度。Case2-2 與 Case2-3 的 2-4-2 m 結果皆與 Case2-1 相同。而 Case2-1 的#4 與 #9 比較快能偵測到則是因為沒有遲滯現象時, 殘留在水下的濕相液體較少,因此氣體濃度 相對的比較高。 由 Case 2-1 的 2-4-2 m 自 180 天後,由 4 m 回升至 2 m 的狀況時,部分孔隙中仍然 有空氣,未完全被水填滿,可能較容易讓油 品進入,而且在通氣層中,空氣孔隙較多會 使得油氣傳輸較快。 地下水含苯濃度值[表 4-2 (a)]於 Case 1, 距離洩漏點較近的監測井#4 與#6,於 2-5-2 m 的部分,Case 1-1 的#4 與#6 為 92 天及 88 天。 遲滯者為 92 天及 88 天。Case 1-2 的#4 與#6 為 125 天與 120 天,有遲滯者模擬結果相同。 Case 1-3 的#4 與#6 為 77 及 75 天,有遲滯者 偵測結果仍然相同。但是在 5-2-5 m 的部分,
有遲滯者模擬的結果偵測到地下水含苯濃度 的時間較快,如 Case 1-1 中的監測井#4,模 擬時為定量注水的方式,使得有遲滯者在孔 隙有空氣時,水位上升較快且較高,因此會 先遇到注入的油品。由於水位在地下水位下 的水相液體,若有遲滯現象時濕相液體會牽 引住殘留於水中的空氣及有機液體,因此水 中的含苯濃度便增加,使得測漏管的偵測效 果提升。 Case 2 的部分,2-4-2 m 於較近的監測井 #5 與#10 監測其遲滯影響並不大,偵測到水 中苯濃度的時間相同。但於 4-2-4 m 較近的 監測井#5 與#10,由於洩漏時在水位面下, 水位上升時土壤成吸水狀態,殘留在水下的 LNAPL 增加,不過由於有遲滯現象時,氣相 的空氣孔隙較大,水位上升到達飽和的時間 較久,因此偵測到水含苯濃度的時間比較 長。 遲滯現象加入模擬的結果較為複雜,而 且其模擬結果不是非常明顯,未來可進一步 進行其它相關的模擬。
5、結論與建議
本研究以 TMVOC 模擬加油站油品洩漏 並評估土壤氣體與地下水監測之有效性與地 下水位變動以及土壤參數間之關係。根據研 究結果可歸納出之結論如下: 1. 變動水位相較於固定水位時,監測的效 果較不穩定,平均起來測漏管監測污染 物到達警戒標準的時間都比固定水位增 加許多。根據美國規範中,加油站之測 漏管應能於 30 天內測得 150 加侖之油品 洩漏事件,意即平均每天應該以 5 加侖 的速度做洩漏(大約為 19 L/day);環保署 (2006)於法規中明訂偵測靈敏度須能達 到 0.2 gal/hr 之標準(4.8 gal/day)。本研究 為進一步探討在洩漏量更小的狀況下, 土壤氣體監測與地下水監測是否仍然有 效,故降低了洩漏的濃度。研究結果發 現,在研究中假設的較小之土壤導水度 條件下,土壤氣體監測和地下水監測仍 然可能及時監測到滲漏事件。因此,若 當加油站的回填材料導水度完全符合規 範要求時,當可更早偵測到油品的滲 漏。 2. 地下水位變化對於透水係數(Kw)與孔隙 率(n)的影響,無論是固定水位或者是變 動水位,透水係數(Kw)較大或者孔隙率 (n)較小者其偵測土壤氣體或地下水含苯 濃度的效果較好。但是水位變動的情形 下,土壤氣體濃偵測的效果比地下水含 苯濃度好。傳輸速率會受到透水係數及 孔隙率的影響,就透水係數而言,即使 在水位變動的情形下,透水係數較大的 案例其污染團整體傳輸速率會比較快, 尤其隨著距離的增加,污染團傳輸速率 受透水係數的影響越明顯。孔隙率則是 當其他條件相同下,其值越小時,污染 團容易充滿孔隙而飽和,使得污染物在 土壤的孔隙中流速增加,讓傳輸速率變 的更快。 3. 在有遲滯現象時,殘留於地下水位面下 的 LNAPL 較多,濕相液體在水位上升 的過程中進行濕潤作用時,會取代原來 孔隙中的非水相液體及空氣。但是過程 中又牽引著非水相液體及空氣,使浮到 水位面上的氣體減少,測漏管偵測土壤 氣體濃度的效果較差,相對的地下水含 苯濃度的監測效果比較好。沒有遲滯現 象時,則情形相反,當殘留於水位面下 的 LNAPL 較少,此時代表土壤氣體濃 度較容易被偵測到,水中含苯濃度則恰 好相反。另外於氣相中,有遲滯現象的 模擬其空氣孔隙率會比較高,無遲滯現 象時空氣孔隙率較小;遲滯現象於水相 中水的滲透力會變小,反之則較大,這 些都是遲滯現象所造成的影響。 4. 本文中洩漏點的位置確實會影響到測漏 管的監測效果。就固定水位而言,Case 1 無論是偵測土壤氣體濃度或地下水含苯 濃度,效果較好。而且除了距離洩漏點 太遠的測漏管(#3、#11 與#12)無法監測 到數據外,其它測漏管皆能監測到土壤 氣體濃度達到警戒的標準。不過洩漏點 位於儲油槽下方,較不利於監測,如 Case 2 於固定水位 2 m 時比較近的測漏管(#5、 #10 與#6)能測到土壤氣體濃度,其它的 測漏管完全沒有辦法發揮作用。甚至固 定水位 4 m 的情形下,沒有測漏管測得 土壤氣體濃度的數據,效果其差。變動水位時,Case 1 洩漏點在水位上方洩漏, 對於測漏管偵測土壤器土濃度而言,效 果較好。Case 2 洩漏點位於儲油槽下方 (水位面下),較不利於土壤氣體濃度偵測 效果。地下水含苯濃度的監測,距離較 近的測漏管無論是洩漏位置的高低不影 響其濃度的監測效率。但是 Case 1 由於 洩漏位置較高,因此若是以監測範圍而 言,Case 1 仍然比 Case 2 來的好。為了 求監測效果能夠更好,監測井的設置仍 然建議靠近污染物的潛勢洩漏地區較高 的地方,以確保監測井測漏管能夠發揮 最佳的效果。 本研究中相對於實務上,監測井可能會因 為環境、地形等因素而無法隨時就地測量其 土壤的氣體濃度。由於加入變動水位的條件, 使得程式在模擬的時間大幅增加,為了減少 模擬冗長的等待時間,場址大小的縮減及減 少污染物的洩漏量都可能造成模擬結果的參 考性質降低,此外也尚未加入抽水井、異質 性土層的模擬方式,另外也可以探討不同的 土壤氣體,或不同的污染物加入成為模擬的 條件。都是未來可以努力的目標。
參考文獻
單信瑜,張良正,「非水相液體於非飽和地層 中傳輸行為之特性」,地球系統科學研討 會,中央大學,桃園,2003 陳培旼,2010,加油站土壤氣體及地下水監 測模擬,交通大學土木工程研究所碩士論 文Beese, F., and R. R. van der Ploeg, 1976, Influences of hysteresis on moisture flow in an unsaturated soil monolith, Soil Sci. Am. J, Vol. 40, pp. 480-484.
Davidson, J. M., D. R. Nielsen, and J. W. Biggar. 1966. The dependence of soil water uptake and release upon the applied
pressure increment. Soil Sci. Soc. Am. Proc. 30:298–303.
Demond, A.H. and Roberts, P.V. (1991). Effect of interfacial forces on two-phase capillary pressure-saturation relationships. Water
Resources Research 27(3): doi:
10.1029/90WR02408. issn: 0043-1397 Fetter, C. W., “Contaminant Hydrogeology,2nd
Ed,” Prentice-Hall, Inc., London, 1999. Kamon, M., Y. Li, G. Flores, T. Inui and T.
Katsumi, 2006. Experimental and
numerical study on migration of LNAPL under the influence of fluctuating water table in subsurface. Ann. Disaster Prevention Res. Inst., 49: 383-392. Lenhard, R.J., Johnson, T.G. and Parker, J.C.
(1993). Ò Experimental observations of nonaqueous-phase liquid subsurface
movementÓ . J. Contam. Hydrol., 12, pp. 79 -101.
Lenhard, R.J., Parker, J.C. and Kaluarachchi, J.J. (1989). A model for hysteretic
constitutive relations governing multiphase flow, 3. Refinements and numerical
simulations. Water Resources Research 25(7): doi: 10.1029/89WR00389. issn: 0043-1397.
Marinelli, F. and D.S. Durnford. 1996. LNAPL thickness in monitoring wells considering hysteresis and entrapment. Ground Water 34(3): 405-414.
Royer, J. M., and G. Vachaud, Field
determination of hysteresis in soil-water characteristics, Soil Sci. Soc. Am. J., 39(2), 221–223, 1975.
Ryan, R. G., and V. K. Dhir (1996). The effect of interfacial tension on hydrocarbon entrapment and mobilization near a
dynamic water table. J. Soil Contamination 5(1): 9–34.
Testa,S.M., and M.T. Paczkowski. Volume determination and recoverability of free hydrocarbon. Ground Water Monitoring Review,9 no.1:120-127 (1989)
國科會補助專題研究計畫成果報告自評表
請就研究內容與原計畫相符程度、達成預期目標情況、研究成果之學術或應用價
值(簡要敘述成果所代表之意義、價值、影響或進一步發展之可能性)
、是否適
合在學術期刊發表或申請專利、主要發現或其他有關價值等,作一綜合評估。
1. 請就研究內容與原計畫相符程度、達成預期目標情況作一綜合評估
■ 達成目標
□ 未達成目標(請說明,以 100 字為限)
□ 實驗失敗
□ 因故實驗中斷
□ 其他原因
說明:
2. 研究成果在學術期刊發表或申請專利等情形:
論文:□已發表 □未發表之文稿 ■撰寫中 □無
專利:□已獲得 □申請中 □無
技轉:□已技轉 □洽談中 □無
其他:
(以 100 字為限)
本研究之相關成果已於環保署環境訓練所 101 年度加油站地下儲槽監測人員訓練班課程 中納入,且已透過參與環保署土壤污染整治基金會委辦計畫修訂加油站監測辦法專家會議討 論,針對加油站監測作業規定提出監測方法與質量要求的建議。3. 請依學術成就、技術創新、社會影響等方面,評估研究成果之學術或應用價
值(簡要敘述成果所代表之意義、價值、影響或進一步發展之可能性)(以
500 字為限)
本研究以模擬進行加油站土壤氣體與地下水監測之模擬,結果對於此兩種方法之有效性得 出重要之結論。亦即,土壤氣體監測和地下水監測之有效性並不如預期,在許多狀況無法達 到法規訂定時所預期的精確度。因為主持人是環保署環訓所加油站監測訓練班的講座,數年 來每年定期訓練約五百位加油站的業者與顧問公司和檢測公司工程師;且亦擔任環保署土壤 與地下水污染整治基金會各項計畫之審查委員。因而本計畫之研究結果,無論透過期刊或研 討會論文發表、或者在主持人參加各種環保署相關的會議與講習時,均將提出來與業界及環 保署討論。並據以建議修訂我國的加油站設置規範與監測辦法。這對於環境保護來說,是最 直接的貢獻。 由於國內學術界與工程界對於非水相有機液體(NAPL)模擬之經驗非常少,因此本研究 在過程中訓練學生使用 TMVOC 進行多相有機物傳輸模擬,對學生和業界來說都非常有價值。1
國科會補助專題研究計畫項下出席國際學術會議心得報告
日期: 101 年 8 月 7 日一、參加會議經過
本次會議為紐西蘭與澳洲大地工程界定期舉辦的國際研討會,因這兩個國家都算
是新興國家,資源充沛,經濟發達,但尚有許多的土地沒有開發,各項公共工程建
設也快速進行中,因此大地工程領域頗為發達。所以,希望藉由參加本次研討會,
瞭解紐澳區域在環境地工專業領域的發展概況與趨勢,並分享台灣在這些領域的概
況與研究方向。
本次研討會參加人數眾多,遠超過主辦單位預期。本次會議大會開幕式演講,座
無虛席。不僅各個口頭發表的場次場場爆滿,海報發表論文也相當多,參觀和討論
的人士也極為踴躍。
本人也和與會人士就台灣土壤地下水污染的相關概況與技術發展的情況交換心得,
並也介紹了個人的研究成果。
計畫編號
NSC 100-2221-E-009 -126
計畫名稱
地下水位變動對油品滲漏監測之影響
出國人員
姓名
單信瑜
服務機構
及職稱
交通大學土木工程學系
會議時間
101 年 7 月 16 日
至
101 年 7 月 18 日
會議地點
澳洲墨爾本市
Crown Convention Center
會議名稱
(中文)澳洲紐西蘭大地工程研討會
(英文)
11th Australia New Zealand Conference on Geomechanics (ANZ
2012) – Ground Engineering in a Changing World
發表論文
題目
(中文) 地下儲槽土壤氣體與地下水監測有效性評估
(英文)
Evaluation of Effectiveness of Soil Gas and Groundwater
2
大會 Keynote Speech 狀況
3
本研究論文海報 與會者閱覽本研究海報
二、與會心得
澳洲與紐西蘭的大地工程領域相當發達,本次會議報名踴躍超出大會預期。尤其
是澳洲面積廣大,許多土地亟待開發,重大基礎建設也在陸續進行中。因該國有相
當豐富的礦產與土地資源,農牧業發達,金融業健全。歐洲金融危機對該國國內基
礎建設影響似乎不大。大地工程領域在此等「開發中地區」市場成長快速,人力需
求高。
本次大會展覽參加廠商甚多,熱烈程度遠勝於國內舉辦的大地工程研討會。參展
廠商中,一半以上是特殊機具設備製造或代理商與專業營造廠。
澳洲雖然人口與台灣相當,但因土地與自然資源充足,經濟成長快速。在大地工
程領域的技術發展與學術研究也獨樹一格。無論是傳統大地工程或者是環境地工領
域,在廣大的澳洲都有實際應用的大量需要,因此其學術發展或業界的技術開發都
極為蓬勃。簡言之,是市場引導學術研究與技術開發。
此外,因為澳洲是英語系國家,所以技術資料的取得與應用的速度極快,基本上
和美國、英國甚至於其他歐洲國家是幾乎沒有時間差距的。這一點也讓該國的學術
研究和技術開發得以緊跟美國和世界其他先進國家的腳步,且亦得以快速將澳洲本
土研究成果發表。
由本此與會狀況來看,澳洲大地工程領域的向心力與動力強大,在全球大地工程
領域中的角色將日漸擴大與強化。
4
展覽會場場景 1
展覽會場場景 2
三、考察參觀活動(無是項活動者略)
(無)
四、建議
紐澳地區的大地工程實務與研究均蓬勃發展,相當值得我國專業人員參與交流並
開發合作機會。
五、攜回資料名稱及內容
5
ANZ2012 論文集光碟與會場廠商展覽資料。
六、其他
6 22 May 2012 Ref: 2459 Dr. Hsin-Yu Shan Associate Professor
National Chiao Tung University, Taiwan 1001 Ta Hsueh Road
HSINCHU CITY 30010 TAIWAN
Dear Hsin-Yu
ORAL & POSTER PRESENTERS - DETAILS OF YOUR SESSION
Please see the details below in regards to your oral and/or poster presentation at the 11th Australia New Zealand Conference on Geomechanics (ANZ 2012).
Please check these details carefully as your session time may have changed.
Session Details
Poster/Oral Title: Evaluation of Effectiveness of Soil Gas and Groundwater Monitoring for Underground Storage Tanks
Paper Status: Accepted Full Paper - Poster Session: Poster Session
Date: Monday, July 16 2012 Time: 1730 - 1830
Poster Number: (if applicable)
7
CERTIFICATE OF POSTER PRESENTATION
The ANZ2012 Conference was organised by Australian Geomechanics Society(AGS).
The Conference was held from 15-18 July 2012 at the Crown Convention Centre, Australia
This is to certify that
Hsin-Yu Shan
of National Chiao Tung University, Taiwan, TAIWAN
presented the following paper at the ANZ2012 Conference.
Evaluation of Effectiveness of Soil Gas and Groundwater Monitoring for Underground
Storage Tanks
This paper was scheduled as a poster presentation and published in the ANZ2012 Conference proceedings
ISBN number: 978-0-646-54301-7
Stephen Tyson
8
CERTIFICATE OF
ATTENDANCE
The ANZ2012 Conference was organised by Australian Geomechanics Society(AGS).
The Conference was held from 15-18 July 2012 at the Crown Convention Centre, Melbourne, Australia
This is to certify that
Hsin-Yu Shan
of National Chiao Tung University, Taiwan, TAIWAN
attended the conference as a full delegate to the ANZ2012 Conference.
Stephen Tyson
9
Evaluation of Effectiveness of Soil Gas and Groundwater Monitoring for Underground
Storage Tanks
Hsin-yu Shan1, and Pei-min Chen2
1Department of Civil Engineering, National Chiao Tung University,1001 Ta Hsueh Road, Hsinchu City, Taiwan; PH +886 3 513 1562; FAX +886 3 571 6257; email:
2Apollo Technology, Co., Ltd. 15F-1, No. 421, Sung Shan Road, Taipei City, Taiwan; PH +886 2 2726 2099; FAX +886 2 2726 2037; email:
ABSTRACT
Potential of leakage of a underground storage tank (UST) of gasoline station increases with its service life. In order to avoid serious pollution caused by the dissolution of toxic constituents in LNAPLs (Light non-aqueous phase liquids), monitoring measures are employed to provide early warning. Among the monitoring methods, soil gas and groundwater monitoring detect the leaked product directly. The pathway of leaked gasoline flows and diffuses and thus, in turn the effectiveness of soil gas and groundwater monitoring, may be affected by the existence of USTs of gasoline station. In this study, numerical simulation with the software TMVOC was performed in order to assess the effectiveness of soil gas and groundwater monitoring. The results show that both soil gas and groundwater monitoring are more effective if the site has a shallow groundwater table and the soil has higher hydraulic conductivity and lower porosity. The effectiveness of soil gas monitoring is better than groundwater monitoring in general, when soil gas and groundwater monitor well are far away leakage then the groundwater monitoring is better than soil gas.
Keywords: LNAPL, underground storage tank, soil vapour monitoring.
1 INTRODUCTION
1.1 UST leakage potential and monitoring
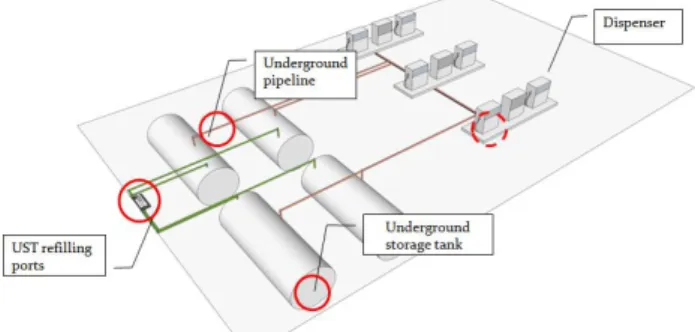
USTs of gasoline stations have been a major source of groundwater contamination in Taiwan. There are more than 2,600 gasoline stations with at least 10,500 USTs nationwide (MOE 2010). The leakage potential of USTs increases with their age. The locations that most likely to leak fuel are dispensers, refilling ports, tanks, and pipeline (Figure 1).
10
Figure 1. Typical layout of a gasoline station
It is imperative to install proper monitoring system for early detection of UST leakage to control
contamination of soil and groundwater. Currently, there are four types of monitoring that are permitted by the regulatory agencies in Taiwan, which are: (1) Soil vapour monitoring, (2) Groundwater monitoring, (3) Tank tightness testing, (4) Interstitial monitoring (TWEPA 2011). Among them, soil vapour monitoring is most widely used due to the relative low cost of installation and monitoring. The vapour monitoring wells must be installed in the UST zone and pipeline zone (TWEPA 2006a). On the longitudinal sides of each UST, there must have at least two vapour monitoring wells. For USTs larger than 60,000 litres, six vapour monitoring wells are required for each tank. The vapour monitoring is conducted monthly. The concentrations of the volatile organic compounds (VOC) are measured with a combustible gas detector and flame ionization detector (FID) or .photoionization detector (PID). When the LEL (Lower Explosive Limit) value is greater than 25% or when the VOC concentrations are greater than 500 ppmV, further investigation is required and, in the meantime, the regulatory agencies must be notified. Soil vapour monitoring cannot be used if the depth to the groundwater table below the gasoline station is less than 2 m.
If groundwater monitoring is selected as the major monitoring method, the depth to groundwater table must be less than 7 m. At least a total of 3 groundwater monitoring wells is required, one installed at the upstream of groundwater flow direction and at least two downstream. The hydraulic conductivity of the soil between the USTs and the monitoring wells must be greater than 0.01 cm/s. If free product is found in the monitoring well or the concentrations of BTEX (Benzene, toluene, ethyl benzene, xylenes) are above the regulatory limits, further investigation is required (TWEPA 2006b).
For gasoline stations with a depth of groundwater table between 2 to 7 m, both soil vapour monitoring and groundwater monitoring are allowed for leak detection monitoring. However, it is difficult to assess the equivalency of the two methods based on their effectiveness or sensitivity of detection of leakage.
1.2 Gasoline vapour transport
Weber and Schwille (1991) simulated the VOC transport in the vadose zone with the software CFEST (Contaminant Finite Element Solute Transport) to evaluate the effectiveness of soil vapour monitoring. The injected vapour for simulating gasoline is a mixture of methane, butane, and trichloroethylene (TCE). For soil vapour monitoring, a rule of thumb is that the time for gasoline to travel 4.5 m (15 ft) is about 15 days (Weber and Schwille, 1991). However, the results of their simulation show that for a leakage rate at 0.2 gal/h in to sand backfill, it takes 9 and 40 days for the VOC vapour to reach a contaminant level of 1% and 10% at the monitoring well 6.7 m (20 ft) away from the leakage source, respectively. In the meantime, when leakage rate