Abstract—An efficient diagnosis is very important for a multi-processor system. The ability to identify all the faulty devices in a multiprocessor system is known as diagnosability. In the compar-ison model, the diagnosis is performed by sending two identical sig-nals from a processor to a pair of distinct neighbors, and then com-paring their responses. Sengupta and Dahbura proposed a polyno-mial-time algorithm with time complexity to diagnose a system with a total number of processors under the comparison model. Recently, some concepts, such as the conditional diagnos-ability and the local diagnosdiagnos-ability, are concerned with the measure which is able to better reflect fault patterns in real systems. In this paper, we propose a specific structure, the balanced wind-bell-tree, and give an algorithm to determine the fault status of each pro-cessor for conditional local diagnosis under the comparison model. According to our results, a specific -connected network with the balanced wind-bell-tree structure is conditionally -diag-nosable, and the time complexity to diagnose all the faulty
proces-sors is with our algorithm, where is the total
number of the processors in the network.
Index Terms—Comparison diagnosis model, conditional diag-nosability, local diagnosis, system diagnosis.
ACRONYMS AND ABBREVIATIONS NoC network-on-chip
PMC Preparata, Metze, Chien MM Maeng, Malek
VLSI very large scale integration NOTATIONS
a graph, where is a finite set, and is a subset of { is an unordered pair of }
the neighborhood set the degree of in
Manuscript received December 04, 2011; revised November 01, 2012; ac-cepted May 21, 2013. Date of publication October 17, 2013; date of current version November 25, 2013. Associate Editor: S. Shieh.
C.-K. Lin is with the Institute of Information Science, Academia Sinica, Taipei City, Taiwan 11529, R.O.C. (e-mail: [email protected]).
Y.-H. Teng is with Department of Computer Science and Information En-gineering, Hungkuang University, Taichung City, Taiwan 433, R.O.C. (e-mail: [email protected]).
J. J. M. Tan is with Department of Computer Science, National Chiao Tung University, Hsinchu City, Taiwan 300, R.O.C. (e-mail: [email protected]). L.-H. Hsu is with Department of Computer Science and Information Engi-neering, Providence University, Taichung City, Taiwan 433, R.O.C. (e-mail: [email protected]).
Color versions of one or more of the figures in this paper are available online at http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TR.2013.2285031
a multigraph, where represents the vertex set, and represents the labeled-edge set a labeled-edge, which represents that the vertices and are compared by
the result of comparing vertices and by the diagnosability of
the conditional diagnosability of the local diagnosability of in
the conditional local diagnosability of in the set of syndromes which could be generated if is the set of faulty vertices
, the symmetric difference between and .
a wind-bell-tree of order rooted at in a balanced wind-bell-tree of order rooted at in
an -dimensional star graph a vertex in
the th component of the unique -neighbor of
the subgraph of induced by vertices with
I. INTRODUCTION
C
LOUD computing and high-speed multiprocessor sys-tems have gained popularity in computer technology. Cloud computing is a computing model which shares the resources. In the multiprocess system, which is a component of a Cloud architecture, sets of processors can operate many programs simultaneously. The reliability of these systems is crucial because even a few malfunctions would disable service for many customers. Whenever devices are found to be faulty, they should be replaced with fault-free ones as soon as possible to guarantee that the system can work properly. Thus the ability of identifying all the faulty devices in a multiprocessor system is very important. This is known as system diagnosis. The diagnosability is the maximum number of faulty devices that can be identified correctly. A system is -diagnosable if at most faulty processors can be identified precisely. Many results about the system diagnosis and the diagnosability have been proposed in literature [6], [8]–[12], [15], [18]–[22], [24], [32]. 0018-9529 © 2013 IEEEA multiprocessor system consists of processors and commu-nication links between processors. In practice, most multipro-cessor systems are based on an underlying bus structure, or fabric, and are perfectly feasible for a central test controller (a physically independent processor acting as a controller) to check each processor in the system. In such a scheme, the cen-tral controller itself can be tested externally. Some research is re-lated to the issue of network-on-chip (NoC); for example, Pande et al. [28] developed an evaluation methodology to compare the performance and characteristics of a variety of NoC topologies; Bartic et al. [3] presented an NoC design which is suitable for building networks with irregular topologies.
Throughout this paper, the underlying topology of a mul-tiprocessor system is modeled as a graph; each processor is represented by a vertex, and the communication bus, or fabric, is represented by a single edge between two vertices. A diag-nosis testing signal is supposed to be delivered from one vertex to another through the communication bus. A system performs a so-called system-level diagnosis by making each processor act as a tester to test each of the directly connected ones. It is noticed that such a scheme contains no central test controller. Several well-known approaches to system diagnosis have been developed. Two fundamental approaches are tested-based diagnosis and comparison-based diagnosis. Preparata, Metze, and Chien [29] proposed a model for system diagnosis, called the PMC model. The PMC model is the tested-based diagnosis with a processor performing the diagnosis by testing on the neighboring processors via the links between them. Another classic approach using the comparison-based diagnosis, called the comparison diagnosis model, was first proposed by Maeng and Malek [24], [25], thus termed the Maeng, Malek (MM) model. In the MM model, the diagnosis is performed by sending two identical tasks from a processor to a pair of distinct neighbors, and then comparing their responses. Sengupta and Dahbura [30] gave an diagnosis algorithm to diagnose a system of processors under the MM model. Several different studies about the MM model also have been proposed in [5], [7], [9], [13], [14], [33].
In some circumstances, we are only concerned about some substructure of a multiprocessor system, which is im-plementable in very large scale integration (VLSI). Such a substructure, for example, can be a ring, a path, a tree, a mesh, and so on. If all processors in these substructures can be guaranteed to be fault free, a procedure is still workable even though there are many faulty processors in the remaining part of the system. Thus, the local substructure plays a more critical role than the global status of the entire system. Motivated by such a concept, Hsu and Tan [16] presented an elegant measure of diagnosability, known as local diagnosability, to identify the diagnosability of a system by computing the local diagnosability with respect to each individual processor.
In classical measures of system-level diagnosability for multiprocessor systems, it has generally been assumed that any subset of processors can potentially fail at the same time. As a consequence, the diagnosability of a system is upper bounded by its minimum degree. In practice, processors in many systems are connected sparsely. Thus, some research addresses the mea-sures that can better reflect fault patterns in real systems. For
instance, Lai et al. proposed conditional diagnosability in [20], which restrains all neighboring processors of a processor from being faulty at the same time. Lin et al. gave a useful structure in [23] to determine its conditional local diagnosability under the PMC model. In this paper, we address conditional local diagnosability under the MM model. We propose a specific structure named the balanced wind-bell-tree, and give an algorithm to efficiently diagnose a vertex in the system. With our algorithm, the faulty or fault-free status of a vertex can be identified correctly if the total number of faulty vertices does not exceed , where is the connectivity of the system.
The rest of this paper is organized as follows. Section II provides preliminary background for system diagnosis and graph-theoretic terminology. In Section III, we propose a specific structure for local diagnosis, and present a local diag-nosis algorithm under the MM model. In Section IV, we give the definition of the balanced wind-bell-tree, and propose an algorithm for conditional local diagnosis under the MM model. With our results, we give an application in Section V. In the final section, we present our conclusions, and measure the time complexity of our proposed algorithm.
II. PRELIMINARIES
The underlying topology of a multiprocessor system is usu-ally modeled as a graph, whose vertex set, and edge set represent the set of all processors, and the set of all communication links between processors, respectively. For the graph definitions and notation, we follow [17] and the Notation section. Two vertices
and in a graph are adjacent if ; we
say is a neighbor of , and vice versa. The degree of a vertex in a graph is the number of edges incident to .
A. System Diagnosis
The MM model is proposed by Maeng and Malek in [24], [25]. Under the MM model, the system diagnosis is performed by a specific testing procedure. For each processor , which has two distinct links to two other processors and , the di-agnosis can be performed by simultaneously sending two iden-tical signals from to and from to , and then comparing their returning responses in the reverse direction. The compar-ison scheme of the system can be modeled as a multigraph
. For , if the outputs of and agree, we have
; otherwise, . If , and
is fault-free, then both and are fault-free. If , then at least one of , , and must be faulty. If is faulty, then the result of the comparison is unreliable, and the exact status of and are unknown. The complete result of all comparisons, defined as a function , is called the syndrome of the diagnosis. The set of all faulty processors in a graph is called a faulty set. Two distinct faulty sets and of are said to be distinguishable if ; otherwise, and are said to be indistinguishable. Clearly, a system is -diagnosable iff each pair of sets and are distinguishable with and . There are sev-eral different ways to verify a system to be -diagnosable under the comparison approach. The following theorem given by Sen-gupta and Dahbura [30] is a necessary and sufficient condition for ensuring distinguishability.
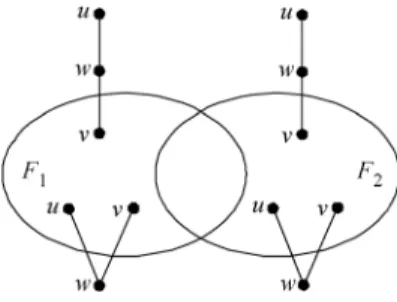
Fig. 1. An illustration for Theorem 1.
Theorem 1: [30] For any and ,
is a distinguishable pair iff at least one of the following condi-tions is satisfied.
1) and such that
.
2) and such that
.
3) and such that
.
See Fig. 1 for an illustration of the theorem.
For a vertex set , we define to be the set . In [30], Sengupta and Dahbura also proposed a sufficient condition for a system being -diagnosable.
Theorem 2: [30] A system with vertices is -diagnosable if
1) ,
2) each vertex has order at least , and
3) for each such that and
, .
B. Local Diagnosis
The probabilities of processor failures in a multiprocessor system are identical and statically independent under the random-fault model. Let . It is intuitive to observe
that forms an indistinguishable pair
of faulty sets. That is, the conventional diagnosability that has been addressed by many researchers mainly describes the global status of a system under the random-fault model. Instead, Hsu and Tan [16] presented the concept of local diagnosability. The research about local diagnosability concerns with the local connective substructure in a system. That is, for a processor in a system, it is only required to determine whether is faulty or not. Given a syndrome produced by a faulty set with and , a graph is -diagnosable at vertex if every faulty set that is consistent with also contains vertex . The local diagnosability of a vertex in is defined to be the maximum integer of such that is -diagnosable at the vertex . The relationship between diagnosability and local diagnosability is revealed in the following theorems.
Theorem 3: [16] A graph is -diagnosable iff it is -diag-nosable at each vertex.
Theorem 4: [16] Let denote the underlying topology of a
multiprocessor system. Then .
Fig. 2. A -connected network is not conditionally -diagnosable.
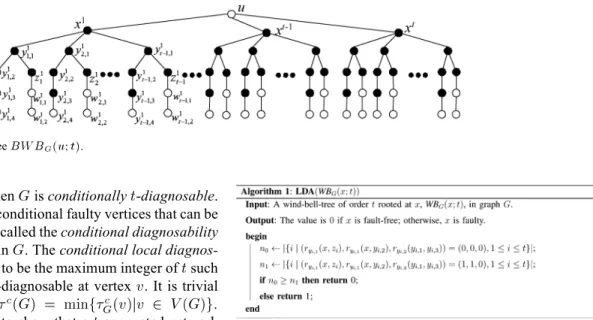
Fig. 3. A wind-bell-tree .
Fig. 4. Illustrations for Proposition 1.
C. Conditional Fault Diagnosis
In [20], Lai et al. proposed the concept of conditional fault diagnosis by restricting that, for each processor in the network, all the processors which are directly connected to do not fail at the same time. Recently, Hsieh and Chuang [13], [15] proposed the concept of strong diagnosability on regular networks and product networks. A system is said to be strongly -diagnosable if it is -diagnosable, and can achieve -diagnosable, except for the case that the neighbors of a processor fail simultaneously. Suppose that . A set is a conditional
faulty set if for any vertex . A system
is conditionally faulty if the faulty vertex set of forms a conditional faulty set. For any two distinct conditional faulty
Fig. 5. A balanced wind-bell-tree .
is a distinguishable pair, then is conditionally -diagnosable. The maximum number of conditional faulty vertices that can be correctly identified in is called the conditional diagnosability of . Let be any vertex in . The conditional local diagnos-ability of in is defined to be the maximum integer of such that is conditionally -diagnosable at vertex . It is trivial
that and .
Now we give an example to show that a -connected network is not conditionally -diagnosable. Let be a -connected net-work with two adjacent vertices and , where
and . We set and
. See Fig. 2 for an illustration. By Theorem 1, and are indistinguishable. Thus, is not con-ditionally -diagnosable.
In Section IV, we propose a specific structure named the bal-anced wind-bell-tree, and give an algorithm to identify whether a given vertex is in a state of fault-free or fault in a conditional faulty system under the MM model. With our algorithm, a vertex can be identified correctly if the total number of faulty vertices does not exceed , where is the connectivity of the system.
III. A LOCALDIAGNOSISALGORITHM
Chiang and Tan proposed a local diagnosis algorithm called the extended star in [7]. In this section, we propose another spe-cific structure, the wind-bell-tree, for local diagnosis, and give a local diagnosis algorithm under the MM model. Different with the extended star, we can construct a specific structure for condi-tional fault diagnosis using the wind-bell-tree. We describe the conditional local diagnosis algorithm in Section IV. Now, we give the definition of a wind-bell-tree as follows.
Definition 1: Let be a graph, and let be a vertex in . A wind-bell-tree of order rooted at is defined to be the subgraph of , denoted by , such that , and
. Fig. 3 illustrates the . Proposition 1: Let
and
as illustrated in Fig. 4. Suppose that is a faulty set, and . Depending on the definition of the MM model and the faulty or fault-free status of , the relation
between the result of and
the least number of is illustrated in Fig. 4.
Let be a graph, and be a faulty set in with . We propose the algorithm LDA (Local-Diagnosis-Algorithm) to identify the faulty or fault-free status of a vertex in a wind-bell-tree under the MM model, and prove the cor-rectness of the algorithm LDA in Theorem 5.
Theorem 5: Let be a wind-bell-tree of order rooted at . If is a faulty set in with , then the faulty or fault-free status of vertex can be identified correctly with
the algorithm .
Proof: We set
,
, and . In the algorithm
, we claim that if , and
if . We prove the theorem by contradiction. Assume that , and . By Proposition 1, we have , which contradicts the assumption that . Now we assume that , and . By Proposition 1, we have , which contradicts the assumption that . Thus the theorem holds.
IV. A CONDITIONALLOCALDIAGNOSISALGORITHM In this section, we discuss the local diagnosability for a mul-tiprocessor system with a conditional faulty set. We propose a specific structure, called a balanced wind-bell-tree, for condi-tional local diagnosis. The definition of a balanced wind-bell-tree is described as follows.
Definition 2: Let be a graph, ,
and . A balanced wind-bell-tree of order rooted at is defined to be the subgraph of , denoted by
, such that
, and
. Fig. 5 illustrates the .
Let be a graph, and be a conditional faulty set in with . We propose the algorithm CFLDA (Conditional-Fault-Local-Diagnosis-Algorithm) to identify the faulty status of a vertex in a balanced wind-bell-tree with the conditionally faulty set under the MM model.
We need the following lemma for the later proof of our results.
Lemma 1: Suppose that is a conditional faulty set in
with . Let
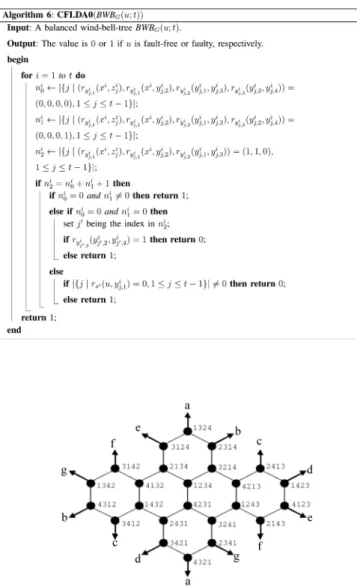
Fig. 6. A star graph ; the same letters represent the connected edges.
Then . That is, for , there is at most one mistake in diagnosis of with the algorithm LDA.
Proof: We prove the lemma by contradiction. Assume that
. By Theorem 5, we have ,
which contradicts the assumption that . Lemma 2: Let , and
. Suppose that is a conditional faulty
set in with . Then the faulty or
fault-free status of vertex can be identified
cor-rectly by the algorithms ,
, ,
and if , , ,
and , respectively.
The proof of Lemma 2 is presented in the Appendix. By Lemma 2, we can prove the correctness of the algorithms CFLDA3, CFLDA2, CFLDA1, and CFLDA0. Hence, we have the following theorem.
Theorem 6: Suppose that . Let be a bal-anced wind-bell-tree of order rooted at . If is a conditional faulty set in with , then the faulty or fault-free status of vertex can be identified correctly with the algorithm
Fig. 7. An illustration for constructing a balanced wind-bell-tree in a star graph .
Fig. 8. . The number in the parentheses on each edge repre-sents the -dimensional edge in .
V. APPLICATION ON THESTARGRAPH
In this section, we show that the proposed diagnosis algorithm CFLDA can be applied to the star graph, the well-known inter-connection network of multiprocessor systems. The star graph
is proposed in [1]. The -dimensional star graph is an attrac-tive alternaattrac-tive to the -cube topology for interconnecting pro-cessors in parallel computers and distributed systems because of its recursive structure, and vertex and edge symmetry. The star graphs are able to embed some well-known network topolo-gies, such as trees [2], grids [19], hypercubes [27], and cycles [31]. Many efficient communication algorithms on star graphs for broadcasting, gossiping, scattering, and Fourier transform are also proposed in [4], [10], [11], [26]. The vertex set of
an -dimensional star graph is is
a permutation of . Thus . The
ad-jacency is defined as follows; is adjacent to through an edge of dimension with
if for , , and . Hence
the degree of every vertex in is . For example, in a containing vertices, two vertices 1234 and 4231 are neigh-bors, and joined through an edge labeled 4. Fig. 6 illustrates the . Let be any vertex of . By the definition of , there is exactly one neighbor of such that and are adjacent through an -dimensional edge with . Now we propose the following algorithm called B-IN-S to con-struct a balanced wind-bell-tree in a star graph for
with . Let be the vertices
in a balanced wind-bell-tree for every . Thus every subtree of induced by is located in mutually distinct components of . See Fig. 7 for an illustration. With this concept, we can construct a balanced wind-bell-tree in a star graph by the algorithm B-IN-S. We de-scribe a constructed by the algorithm B-IN-S in Fig. 8.
VI. CONCLUDINGREMARKS
The issue of identifying faulty processors is important for the design of multiprocessor systems, which are implementable with VLSI. The process of identifying all the faulty processors is called system-level diagnosis. Under the MM model, each
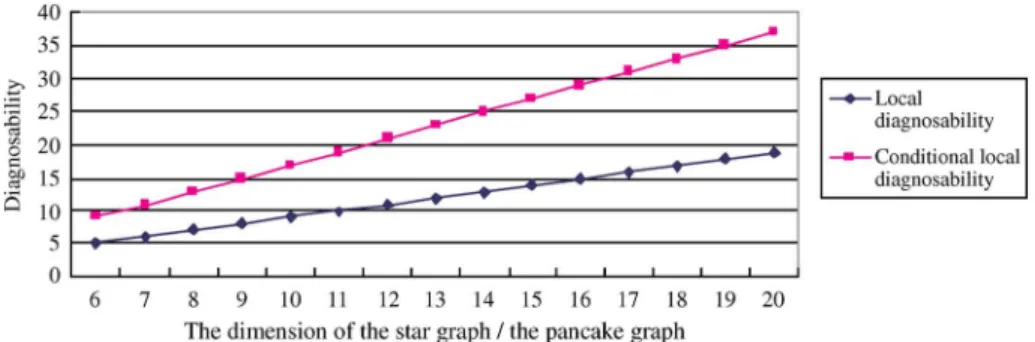
Fig. 9. The local diagnosability and conditional local diagnosability for a vertex in the star graph or in the pancake graph.
processor acts as a comparator to test each pair of adjacent two processors. Sengupta and Dahbura [30] proposed a poly-nomial-time algorithm with time complexity to diag-nose a system with a total number of processors under the MM model. In the random-fault probabilistic model of multi-processor systems, multi-processors are assumed to fail statistically independently. For many practical multiprocessor systems or interconnection networks, the probability that all the neighbors of a processor are faulty simultaneously is very small. Thus, we address the conditional local diagnosability problem under the MM model in this paper. We propose a specific structure called the balanced wind-bell-tree, and give an algorithm CFLDA to diagnose a vertex in the system with a conditional faulty set under the MM model. According to our results, a specific -con-nected network with processors is conditionally -di-agnosable. In Section V, we give an application by constructing the balanced wind-bell-tree in an -dimensional star graph . Akers and Krishnameurthy [1] proposed another family of inter-esting interconnection networks, called the pancake graph.
Sim-TABLE I
THETIMECOMPLEXITY ANDDIAGNOSABILITY IN ASYSTEM UNDER THE
MM MODELASSUMINGTHAT ,AND
ilar to , the -dimensional pancake graph is an -reg-ular graph with vertices. Moreover, the pancake graph is vertex transitive. With an algorithm similar to B-IN-S, a bal-anced wind-bell-tree can be constructed in a pancake graph. Fig. 9 shows that under the same dimension, the conditional local diagnosability for a vertex is about twice larger than the local diagnosability for a vertex in the star graph or in the pan-cake graph.
Now, we measure the time complexity of the proposed algorithm CFLDA. Many practical systems with vertices have degrees on the order of for each vertex. For a system , a balanced wind-bell-tree of order rooted at can be constructed with time complexity . The time complexity of the algorithm LDA is
for , and it runs times.
As a result, the time complexity of the CFLDA algorithm is . Consequently, the total time for diagnosing all the faulty vertices is . Table I shows the time complexity and diagnosability in some algorithms under the MM model. The -dimensional star graph has vertices, and the degree of each vertex is . Let . We have . Thus the time complexity to diagnose all the faulty vertices in a star
graph is .
Future works will try to find some specific structure for the existing practical multiprocessor systems and interconnection networks. Then we propose to design the efficient diagnosis al-gorithm, and prove the diagnosability of the system with this useful structure in accordance with various conditions and di-agnosis models.
APPENDIX Proof of Lemma 2:
Case 1) Suppose that . We prove the correctness of the algorithm as follows. We set for every , for every , , and . In the algorithm , we
claim that if , and if .
By Lemma 1, . We have the following subcases.
Subcase 1.1: Suppose that , and . Thus
. Because , we
have if
, and .
Subcase 1.2: Suppose that and . Thus
. Because , we have
if
, and .
Subcase 1.3: Suppose that . Because
, we have .
Thus, the algorithm is correct.
Case 2) Suppose that . We prove the correctness of
the algorithm as
fol-lows. Let . For each ,
suppose that
We claim that if , then . We
prove by contradiction. Assume that , and
. By Lemma 1, ,
hence . By Proposition 1, we have
if , which contradicts the assumption
that . Similarly, we have if
.
Without loss of generality, we assume that
, and . Obviously, if there exists some
such that , then . Now we
prove that if for every
, then . Let .
We claim that if .
We prove by contradiction. Assume that ,
and . Thus we have .
That is, . Hence
for every . Thus
we have . Because ,
we have
. By Theorem 5, .
Hence , and . Thus,
for , which contradicts
the assumption that . Hence,
we have . Therefore, if for
every , then . Thus the algorithm is correct.
Case 3) Suppose that . We prove the correctness of
the algorithm as
follows. We set . First, we claim that . We prove it by contradiction.
Assume that . Because , we
have . For , let
and
. By Proposition 1,
, which contradicts the assumption that . Therefore, we have . Obviously, if there exists some
such that , then . Suppose
that for every . We
have the following subcases.
Subcase 3.1: If , then . Assume that by contradiction. If there exists some
such that
, then the two ver-tices and are faulty. By Proposition 1, we have
, which contradicts the assumption that . Subcase 3.2: Suppose that . Let be an index such that
. We have the fol-lowing subcases.
Subcase 3.2.1: If ,
then . Assume that by
contra-diction. We have .
By Proposition 1,
, which contradicts the
assump-tion that .
Subcase 3.2.2: If
, then . Assume that by contradiction.
We have . By
Proposition 1,
, thus there is at least
one faulty vertex in ,
and in , respectively. By
Proposition 1,
, which contradicts the assumption that
.
Subcase 3.2.4: If ,
and , then .
Assume that by contradiction.
Because , and
, thus there is at least
one faulty vertex in ,
and in , respectively. By
Proposition 1,
, which contradicts the assumption that
.
Subcase 3.3: Suppose that . We have the following subcases.
Subcase 3.3.1: If there
ex-ists some such that
, then . Assume that
by contradiction. We have
. Because ,
and , thus
. By Proposition 1, , which contradicts the assumption that
.
Subcase 3.3.2: Suppose that either or
for all . There exists at least
one faulty vertex in .
We have the following subcases. Subcase 3.3.2.1: If there exists some
such that , then
. Assume that by con-tradiction. Because
, thus there exists at least one faulty
vertex in . By
Propo-sition 1,
, which contradicts the
assumption that .
Subcase 3.3.2.2: If
for all , and there exists
some such that ,
.
Subcase 3.3.2.3: If
for all , then .
Assume that by contradiction.
Because , there exists
some such that . Because , there is at least one faulty vertex
in . By Proposition 1,
, which contradicts the
assumption that .
Thus the algorithm is
correct.
Case 4) Suppose that . We prove the correctness of
the algorithm as
fol-lows. For every and , let
Because , thus . First, we claim
that, if for every , then
. Assume that by contradiction. Let , and
. By Lemma 1, . Suppose that , and . Then by Proposition 1, we have
, which contradicts the assumption that . Suppose that .
Because , we have .
Now we claim that there is at most one index for
such that . By
contradiction, assume that ,
and for some ,
and . We have two cases. First, the two vertices and are faulty. Suppose that
if , which contradicts the assumption
that . Second, one of and
is faulty. Without loss of generality, suppose that and . By Proposition 1, we have
if , which contradicts the assumption that . Hence let be the only index
such that , where . We
have the following subcases.
Subcase 4.1: If and , then . We claim that . Assume that
by contradiction. Because , there exists some such that at least one of
is in fault. By Proposition 1, we have , which contradicts the assumption that .
Thus . Because , we have
.
Subcase 4.2: Suppose that ,
and . Hence, we have
. Let be the index such that
. We prove that if
, then .
As-sume that by contradiction. Because
, and ,
there is least one faulty vertex in
, and in ,
respectively. By Proposition 1, we have , which contradicts the assumption
that . Now we prove that if
, then . We claim
that . Assume that by
contradiction. Because ,
and , we have
. By Proposition 1, we have , which contradicts the
assump-tion that . Thus, .
Then we claim that . Assume
that by contradiction. Because
, ,
and , we have
. By Proposition 1, we have
, which contradicts the assumption
that . Thus, . Because
, we have .
Subcase 4.3: Suppose that .
We claim that . Assume that
by contradiction. Because
for some , we have
. By Proposition 1, we have
, which contradicts the
as-sumption that . Thus, .
Hence, if there exists some such that
for , then
. Now we prove that if
for all , then . Assume that by contradiction. We have for all . Because , there exists
some such that . Thus,
we have . By Proposition 1, we have , which contradicts the assumption that
. Thus, .
Therefore, the algorithm is
correct.
REFERENCES
[1] S. B. Akers and B. Krishnameurthy, “Group-theoretic model for sym-metric interconnection networks,” IEEE Trans. Comput., vol. 38, no. 4, pp. 555–566, Apr. 1989.
[2] N. Bagherzadeh, M. Dowd, and N. Nassif, “Embedding an arbitrary tree into the star graph,” IEEE Trans. Comput., vol. 45, no. 4, pp. 475–481, Apr. 1996.
[3] T. A. Bartic, J. Y. Mignolet, V. Nollet, T. Marescaux, D. Verkest, S. Vernalde, and R. Lauwereins, “Topology adaptive networkon-chip de-sign and implementation,” IEE Proc. Comput. Digital Techniq., vol. 152, no. 4, July 2005.
[4] P. Berthome, A. Ferreira, and S. Perennes, “Optimal information dis-semination in star and pancake networks,” IEEE Trans. Parallel
Dis-trib. Syst., vol. 7, no. 12, pp. 1292–1300, Dec. 1996.
[5] C. P. Chang, P. L. Lai, J. J. M. Tan, and L. H. Hsu, “Diagnosability of -connected networks and product networks under the comparison di-agnosis model,” IEEE Trans. Comput., vol. 53, no. 12, pp. 1582–1590, Dec. 2004.
[6] G. Y. Chang and G. H. Chen, “ -diagnosability of multiprocessor systems with applications to grids and tori,” SIAM J. Comput., vol. 37, pp. 1280–1298, 2007.
[7] C. F. Chiang and J. J. M. Tan, “Using node diagnosability to determine -diagnosability under the comparison diagnosis model,” IEEE Trans.
Comput., vol. 58, no. 1, pp. 251–259, Jan. 2009.
[8] A. Das, K. Thulasiraman, and V. K. Agarwal, “Diagnosis of -diagnosable systems,” SIAM J. Comput., vol. 23, pp. 895–905, 1994.
[9] J. Fan, “Diagnosability of crossed cubes under the comparison diag-nosis model,” IEEE Trans. Parallel Distrib. Syst., vol. 13, no. 7, pp. 687–692, 2002.
[10] P. Fragopoulou and S. G. Akl, “A parallel algorithm for computing Fourier transforms on the star graph,” IEEE Trans. Parallel Distrib.
Syst., vol. 5, no. 5, pp. 525–531, 1994.
[11] P. Fragopoulou and S. G. Akl, “Optimal communication algorithms on star graphs using spanning tree constructions,” J. Parallel Distrib.
Comput., vol. 24, pp. 55–71, 1995.
[12] W. S. Hong and S. Y. Hsieh, “Strong diagnosability and conditional diagnosability of augmented cubes under the comparison diagnosis model,” IEEE Trans. Rel., vol. 61, no. 1, pp. 140–148, Mar. 2011. [13] S. Y. Hsieh and Y. S. Chen, “Strongly diagnosable product networks
under the comparison diagnosis model,” IEEE Trans. Comput., vol. 57, no. 6, pp. 721–732, Jun. 2008.
works. Boca Raton, FL, USA: CRC Press, 2008.
[18] Y. Ishida, N. Adachi, and H. Tokumaru, “Diagnosability and distin-guishability analysis and its applications,” IEEE Trans. Rel., vol. 36, no. 5, pp. 531–538, Dec. 1987.
[19] J. S. Jwo, S. Lakshmivarahan, and S. K. Dhall, “Embedding of cycles and grids in star graphs,” J. Circuits, Syst., Comput., vol. 1, pp. 43–74, 1991.
[20] P. L. Lai, J. J. M. Tan, C. P. Chang, and L. H. Hsu, “Conditional di-agnosability measures for large multiprocessor systems,” IEEE Trans.
Comput., vol. 54, no. 2, pp. 165–175, Feb. 2005.
[21] C. W. Lee and S. Y. Hsieh, “Diagnosability of two-matching compo-sition networks under the model,” IEEE Trans. Dependable
Se-cure Comp., vol. 8, no. 2, pp. 246–255, 2011.
[22] C. W. Lee and S. Y. Hsieh, “Determining the diagnosability of (1,2)-matching composition networks and its applications,” IEEE Trans.
De-pendable Secure Comput., vol. 8, no. 3, pp. 353–362, 2011.
[23] C. K. Lin, T. L. Kung, and J. J. M. Tan, “Conditional-fault diagnos-ability of multiprocessor systems with an efficient local diagnosis al-gorithm under the PMC model,” IEEE Trans. Parallel Distrib. Syst., vol. 22, no. 10, pp. 1669–1680, Oct. 2011.
[24] J. Maeng and M. Malek, “A comparison connection assignment for self-diagnosis of multiprocessors systems,” in Proc. 11th Int. Symp.
Fault-Tolerant Comput. (FTCS ’81), 1981, pp. 173–175.
[25] M. Malek, “A comparison connection assignment for diagnosis of mul-tiprocessors systems,” in Proc. 7th Int. Symp. Comput. Architecture
(ISCA ’80), 1980, pp. 31–36.
[26] V. E. Mendia and D. Sarkar, “Optimal broadcasting on the star graph,”
IEEE Trans. Parallel Distrib. Syst., vol. 3, no. 4, pp. 389–396, Apr.
1992.
[27] Z. Miller, D. Pritikin, and I. H. Sudborough, “Near embeddings of hy-perucbes into Cayley graphs on the symmetric group,” IEEE Trans.
Comput., vol. 43, no. 1, pp. 13–22, Jan. 1994.
[28] P. P. Pande, C. Grecu, M. Jones, A. Ivonov, and R. Saleh, “Performance evaluation and design trade-offs for network-on-chip interconnect ar-chitectures,” IEEE Trans. Comput., vol. 54, no. 8, pp. 1025–1040, Aug. 2005.
[29] F. P. Preparata, G. Metze, and R. T. Chien, “On the connection assign-ment problem of diagnosis systems,” IEEE Trans. Electron. Comput., vol. 16, no. 12, pp. 848–854, Dec. 1967.
Lett., vol. 93, pp. 29–36, 2005.
Cheng-Kuan Lin received the BS degree in applied mathematics from Chinese
Culture University, Taiwan, Republic of China, in 2000; the MS degree in math-ematics from the National Central University in 2002; and the PhD degree in computer science from the National Chiao Tung University in 2011. He is now a postdoctoral fellow in the Institute of Information Science, Academia Sinica. His research interests include interconnection network, algorithm, graph theory, wireless network, and wireless sensor network.
Yuan-Hsiang Teng received a B.S. degree, and an M.S. degree in computer
in-formation science from the National Chiao Tung University, Taiwan, in 2002, and 2004, respectively. He received a Ph.D. degree in computer science from the National Chiao Tung University in 2008. Currently, he is an assistant pro-fessor in the Department of Computer Science and Information Engineering, Hungkuang University, Taiwan, Republic of China. His research interests in-clude graph theory, interconnection networks, and algorithms.
Jimmy J. M. Tan received the BS and MS degrees in mathematics from the
National Taiwan University in 1970 and 1973, respectively, and the PhD degree from Carleton University, Ottawa, in 1981. He has been on the faculty of the Department of Computer Science, National Chiao Tung University, since 1983. His research interests include design and analysis of algorithms, combinatorial optimization, and interconnection networks.
Lih-Hsing Hsu received the BS degree in mathematics from Chung Yuan
Chris-tian University, Taiwan, Republic of China, in 1975 and the PhD degree in math-ematics from the State University of New York at Stony Brook in 1981. He is currently a professor in the Department of Computer Science and Information Engineering, Providence University, Taiwan, Republic of China. His research Interests include interconnection networks, algorithms, graph theory, and VLSI layout.