I-Shou University Institutional Repository:Item 987654321/11252
58
0
0
全文
(2) 無線感測網路的節點定位問題之研究 The Study of Localization Problems in Wireless Sensor Networks 研 究 生:吳宗德. Student:Tzung-De Wu. 指導教授:陳啓彰 博士. Advisor:Dr. Chi-Chang Chen. 義守大學 資訊工程研究所 碩士論文. A Thesis Submitted to Department of Information Engineering I-Shou University in Partial Fulfillment of the Requirements for the Master degree in Information Engineering July, 2010 Kaohsiung, Taiwan, Republic of China. 中華民國九十九年七月.
(3)
(4) 無線感測網路的節點定位問題之研究 研究生:吳宗德. 指導教授:陳啓彰 博士. 義守大學資訊工程研究所. 摘要 本篇論文在探討無線感測網路 (Wireless Sensor Network,WSN) 的節 點定位問題,在無線感測網路上,想要達到感測節點 (Sensor Nodes) 能夠 提供準確的地理位置,最簡單的解決方法,即是在全部的感測節點上都裝 設全球定位系統 (Global Positioning System,GPS),但是此方法的硬體成本 將會是相當可觀的。 本篇論文所提出的定位方法,採用了無範圍基礎 (Range Free) 分類 上之 DV-Hop 為主體的構想來做改善,同時結合了新的跳躍平均數 (HopSize) 選取計算的概念,而依照跳躍平均數選取的方式,又可以區分 成最短錨節點距離法 (Shortest Anchor Distance Algorithm,SADA) 和平均 錨節點距離法 (Average Anchor Distance Algorithm,AADA),最終再分別 結合 Selective Anchor Node Localization Algorithm 的概念 [15],藉此達到 更準確的地理位置之定位方法。 關鍵字:無線感測網路,節點定位,最短錨節點距離法,平均錨節點距離 法. I.
(5) The Study of Localization Problems in Wireless Sensor Networks Student : Tzung-De Wu. Advisor : Dr. Chi-Chang Chen. Department of Information Engineering I-Shou University. Abstract The paper aims at exploring the self-localization mechanisms for the wireless sensor network (WSN). For WSN, the simplest way to provide the accurate location is to install global positioning system (GPS) at every sensor node location around the world. However, the cost to install GPS for each sensor is too expensive.. The self-localization mechanisms we proposed in the paper are based on the DV-Hop algorithm based on the range free category. We propose two new hopsize mechanisms, namely Shortest Anchor Distance Algorithm (SADA) and Average Anchor Distance Algorithm (AADA). Each of them applies the concept of Selective Anchor Node Localization Algorithm to improve the accuracy in the system.. Keyword:Wireless Sensor Network, Localization Problem,Shortest Anchor Distance Algorithm, Average Anchor Distance Algorithm. II.
(6) 目錄 中文摘要.....................................................................................................I 英文摘要................................................................................................... II 目錄..........................................................................................................III 圖目錄....................................................................................................... V 表目錄.................................................................................................... VII 第一章 序論..........................................................................................- 1 第一節 無線感測網路的簡介........................................................... - 1 第二節 研究動機與背景................................................................... - 4 第三節 章節概述............................................................................... - 6 第二章 相關研究..................................................................................- 7 第一節 探討現今常見的定位技術................................................... - 7 壹. 全球定位系統.........................................................................- 8 貳. 收訊時間.................................................................................- 9 參. 收訊時間差...........................................................................- 11 肆. 收訊強度法...........................................................................- 12 伍. 收訊角度法...........................................................................- 13 -. III.
(7) 陸. DV-Hop .................................................................................- 14 柒. ECHO ....................................................................................- 16 捌. SeRLoc ..................................................................................- 17 玖. LAD.......................................................................................- 18 第二節 改善 DV-HOP 相關研究之探討 ......................................... - 19 壹. Weighted Least Square Method ............................................- 19 貳. Reduced Node Location Error ..............................................- 19 參. Selective Anchor Node Localization Algorithm ...................- 21 第三章 改良演算法............................................................................- 24 第一節 演算法構想......................................................................... - 24 第二節 演算法步驟......................................................................... - 30 壹. 最短錨節點距離法 (SADA) ...............................................- 30 貳. 平均錨節點距離法 (AADA) ..............................................- 33 第四章 模擬與分析............................................................................- 36 第五章 結論與未來展望....................................................................- 46 參考文獻..............................................................................................- 47 -. IV.
(8) 圖目錄 圖 1. 無線感測網路結構圖............................................................................- 4 圖 2. 全球定位系統衛星分布圖....................................................................- 8 圖 3. 收訊時間圖..........................................................................................- 10 圖 4. 收訊時間差圖......................................................................................- 12 圖 5. 收訊角度法圖......................................................................................- 13 圖 6. DV-HOP 範例圖 ...................................................................................- 15 圖 7. ECHO 範例圖......................................................................................- 17 圖 8. SERLOC 範例圖 ...................................................................................- 17 圖 9. SANLA 範例圖 ...................................................................................- 21 圖 10. SANLA 反向推算圖 .........................................................................- 22 圖 11. HOPSIZE 選取圖 .................................................................................- 25 圖 12. 感測節點分布圖................................................................................- 27 圖 13. 反向推算圖........................................................................................- 28 圖 14. 感測節點數量為 50 個、感測範圍為 20 公尺 ...............................- 40 圖 15. 感測節點數量為 50 個、感測範圍為 30 公尺 ...............................- 40 圖 16. 感測節點數量為 100 個、感測範圍為 20 公尺 .............................- 41 圖 17. 感測節點數量為 100 個、感測範圍為 30 公尺 .............................- 41 圖 18. 感測節點數量為 150 個、感測範圍為 20 公尺 .............................- 42 -. V.
(9) 圖 19. 感測節點數量為 150 個、感測範圍為 30 公尺 .............................- 42 -. VI.
(10) 表目錄 表格 1. 模擬環境相關設備..........................................................................- 36 表格 2. 模擬環境相關參數..........................................................................- 36 表格 3. 圖表相關比較內容..........................................................................- 36 表格 4. 感測節點數量為 50 個、感測範圍為 20 公尺 .............................- 37 表格 5. 感測節點數量為 50 個、感測範圍為 30 公尺 .............................- 37 表格 6. 感測節點數量為 100 個、感測範圍為 20 公尺 ...........................- 38 表格 7. 感測節點數量為 100 個、感測範圍為 30 公尺 ...........................- 38 表格 8. 感測節點數量為 150 個、感測範圍為 20 公尺 ...........................- 39 表格 9. 感測節點數量為 150 個、感測範圍為 30 公尺 ...........................- 39 -. VII.
(11) 第一章 序論 第一節 無線感測網路的簡介 無線感測網路 (Wireless Sensor Network,WSN) 的發展,最早是由美 國加州柏克萊大學 (UC Berkeley) David Culler 教授所主持的一項研究計 畫,稱之為智慧灰塵 (Smart Dust),運用方式則是藉由廣泛佈建大量的感 測節點 (Sensor Nodes) 來監控環境或是人員的變動,當遠方的基地台 (Base Station) 經由無線感測網路收集到這些資料後,就能夠建構出該地區 的相關狀況。 智慧灰塵這項計畫是由美國國防部研究計畫單位 (Defense Advanced Research Projects Agency,DARPA) 所支助的,原先的構想是應用在軍事 上,例如當發生戰事時,可以優先使用無人駕駛的飛機將數以百萬的感測 節點灑在敵方陣營,執行軍事情報收集的行為,藉此降低人員深入敵方所 需要付出的危險代價,因此近幾年來,已經逐漸被廣泛運用在軍事應用、 環境應用、醫療和家庭應用、人員車輛追縱、交通訊息應用、其它商業應 用…等許多方面 [1][2]。 在軍事應用上,可以替代人員運用於偵察,進而降低士兵的傷害率; 可以監控戰場上的狀態,例如監控任何交通工具的位置,並且增加資訊收 集回傳的速度;可以在友軍的人員身上裝設感測節點以供識別,藉此降低 誤傷友軍人員的事件。. -1-.
(12) 在環境應用上,可以提供一個高密度的時間與空間上的監測,讓生態 學家更加輕易瞭解大自然複雜的交互作用,同時可以透過網際網路將收集 到的資料,經由無線網路傳輸的方式傳送至資料庫中心,達成全球化監 測;可以將數以百萬的感測節點佈建於森林中,藉此對火災發生的地點提 供最迅速的判斷;可以偵測化學工廠附近的水質是否有遭受到汙染,藉此 提供遭受到化學污染的位置以及檢定出何種化學污染,進而不需要人員親 自冒險進入受污染區;可以運用於水災判定、監測空氣污染、水污染、土 壤污染;監控生物棲息地與覓食習慣。 在醫療和家庭應用上,可以將感測節點裝設在人員身上,藉此觀察老 人家或是重症病患的健康程度和人體各項健康數據,假若當意外發生又無 人發現時,可以即時通知家人或是警消醫護人員;可以將感測節點裝設在 病人或是藥師身上,藉此降低錯誤的藥物處方或是病人拿錯藥的事件;可 以將含有啟動器的感測器佈建於房屋中,讓使用者在遠方或是在房屋裡可 以經由網際網路執行許多家事。 在交通訊息應用上,則是近期較為新起的應用,例如車流量的計算、 事故偵測或是路徑選擇…等;可以用於監視橋樑、高架橋、高速公路…等 道路環境,對於許多老舊的橋樑而言,橋墩長期遭受到溪水的沖刷,可以 將感測節點佈建在橋樑的兩側或是橋墩的底部,藉此收集橋樑的溫度、溼 度、振動幅度、橋墩被侵蝕程度…等,期望能夠避免斷橋事件的發生。. -2-.
(13) 在商業應用上,可以利用感測節點來偵測不良品,達到工廠自動化生 產線上的品管監控;傳統辦公室的空調系統是採取中央控制的,因此可能 造成在相同的區域內,溫度高低卻有明顯的差異,假若建造無線感測網路 系統,那麼在各個角落的感測節點則可以知道當時環境的溫度狀況,進而 要求控制當時的氣溫或是空氣流動的情形;監控車輛或是商品的失竊。 在上述的這些應用中,大部分都需要了解感測節點的所在地理位置, 以便了解感測到的事件所發生的地點,因此感測節點的定位問題,便成了 在無線感測網路中非常重要的議題。. -3-.
(14) 第二節 研究動機與背景. 圖 1. 無線感測網路結構圖 如圖 1,假若使用者需要某些資訊時,而向感測節點提出相關的要求, 那麼當感測節點感測到使用者所需要的資料時,則將此資料經由無線網路 的傳輸方式回傳給資料收集節點 (Sink Node),最終再傳送給後端的基地 台、使用者…等。 但是問題來了,在回傳來的資料裡,只有具備了感測節點所感測到的 數據,假若沒有事先紀錄感測節點的編號和座標,因此無法得知感測節點 的所在位置,也就無法得知數據是來自於哪個地區。 舉個例子來說,在碩士求學的過程中,曾經有接觸過由 CrossBow [3] 公司所製造的無線感測器系統,在使用上發現了一些美中不足的地方,那 就是此配備雖然可以提供使用者從電腦上觀測得知一些溫度、溼度、亮 度…等數據,但是使用者卻無法得知數據是來自於哪個地區,那麼對於使 用者來說,此數據的貢獻度是有限的。 -4-.
(15) 在不需要考量成本的情況下,目前最簡單的解決方法,即是在全部的 感測節點上都裝設全球定位系統 (Global Positioning System,GPS),此方 法不但方便快速,況且大幅的提升定位的準確性;但是相對的,在考量成 本的情況下,要將全部的感測節點上都裝設全球定位系統,那麼硬體成本 將會是相當可觀的,況且感測節點的電源能量是非常有限的,此舉勢必會 造成更大的能量消耗,進而減少整體的網路壽命。 基於上述的種種因素,也造就了我去探討關於無線感測網路的節點定 位問題,我認為假若使用者只能從感測節點上單單得到數據的變化,卻無 法明確得知數據來自於哪個地區,那麼對於使用者來說,此數據的貢獻度 是有限的。. -5-.
(16) 第三節 章節概述 本篇論文主要區分成五個部分,分別為:. 第一章 序論: 介紹無線感測網路的基本概念。. 第二章 相關研究: 描述研究動機與背景,並且介紹過去相關的研究。. 第三章 改良演算法: 參考相關的演算法並且嘗試改進,藉此提出新的演算法,同時詳細描 述其方法與步驟。. 第四章 實驗結果與分析: 模擬所提演算法的執行結果,並且與 DV-Hop Algorithm、SANL Algorithm、SAD Algorithm、AAD Algorithm 做比較。. 第五章 結論: 為本篇論文做個總結與未來研究的方向。. 參考文獻: 本篇論文所提及的相關探討文獻,附錄於此。. -6-.
(17) 第二章 相關研究 第一節 探討現今常見的定位技術 在無線感測網路上,想要達到感測節點能夠提供準確的地理位置,最 簡單的解決方法,即是在全部的感測節點上都裝設全球定位系統,但是此 方法的硬體成本將會是相當可觀的,況且感測節點的電源能量是非常有限 的,此舉勢必會造成更大的能量消耗,進而減少整體的網路壽命。 在無線感測網路的節點定位技術中,假若不採用裝設全球定位系統來 定位,在大多數的研究當中,常見的幾個定位技術將可以區分成範圍基礎 (Range Based) 和無範圍基礎 (Range Free)。 無線感測網路的節點定位技術,在範圍基礎方面,其定位方法則是藉 由額外附加的硬體來協助,例如時間計時器、訊號強度接收器、指向性天 線 (Directional Antenna)、天線陣列 (Antenna Array),藉此得到更準確的 定位,而定位的準確性則取決於測量的方法,這些方法包括了收訊時間 (Time of Arrival,TOA)、收訊時間差 (Time Difference of Arrival,TDOA)、 訊號強度法 (Received Signal Strength,RSS)、收訊角度法 (Angle of Arrival,AOA)。 無線感測網路的節點定位技術,在無範圍基礎方面,其定位方法則是 不需要藉由額外附加硬體的協助,而是採用無線感測網路原有的特性,並 且透過數學函數…等方法,藉此求得定位資訊,如 DV-Hop。. -7-.
(18) 目前大多數無線感測網路的節點定位技術,大部分都是假設感測節點 是佈建在一個優良的環境當中,感測節點可以接收到錨節點 (Anchor Node) 所傳送的正確訊號;但是實際上,感測節點可能被佈建在一個不友 善的環境當中,或是錨節點可能遭受到破壞,亦或是被輸入錯誤的位置訊 息,而導致感測節點定位時,可能產生嚴重的定位錯誤問題,因此相關常 見的定位方法有 ECHO、SeRLoc、LAD。. 壹. 全球定位系統 全球定位系統 (Global Positioning System,GPS) [4],亦可稱為全球衛 星定位系統,是一套中距離圓型軌道衛星導航系統,可以為地球表面絕大 部分的地區 (98%) 提供準確的定位、測速和高精度的時間標準,該系統 是由美國國防部研製和維護,可以提供位於全球任何地區準確的三維位 置、三維運動和時間。. 圖 2. 全球定位系統衛星分布圖. -8-.
(19) 如圖 2,該系統包括太空中的 24 顆全球定位系統衛星;地面上的一 個主控站、三個數據注入站和五個監測站,以及作為用戶端的全球定位系 統接收機;最少只需要其中的四顆衛星,就能夠迅速確定用戶端在地球上 所處在的位置以及海拔高度,而且接收到的衛星數量越多,則解碼出來的 位置就越準確。 全球定位系統所擁有的六大特點:全天候,不受任何天氣的影響;全 球覆蓋高 (高達 98%);三維定點定速定時高準確性;快速、省時、高效 率;應用廣泛、多功能;可移動定位。 但是全球定位系統受限於視線波系統 (Line of Sight,LOS) 所影響, 在都市中容易遭受到建築物的遮蔽而造成衛星訊號微弱,導致無法獲得足 夠的衛星數量來進行定位的狀況,在考量視線波系統所造成的影響和成本 上的考量,在全部的感測節點上都裝設全球定位系統似乎不是一個好方 法,因此在近幾年內,有越來越多的學者在投入無線感測網路的節點定位 問題研究上選擇不裝設全球定位系統。. 貳. 收訊時間 收訊時間 (Time of Arrival,TOA) [5] 是種常被討論的定位方法之 一,其工作原理是藉由測量訊號由錨節點至感測節點傳輸所需要的時間, 將此傳輸所需要的時間乘上訊號傳播的速度,則可以得知錨節點與感測節 點的距離。 -9-.
(20) ((T3 − T0 ) − (T2 − T1 )) * V 2. (1). 如數學式子(1),T0 為訊號所發出的時間,T1 為訊號所接收到的時間,. T2 為訊號開始回傳的時間,T3 為訊號所接收到的時間,V 為訊號傳播的速 度。. 圖 3. 收訊時間圖 如圖 3,T0 為超音波訊號所發出的時間,T1 為超音波訊號所接收到的 時間,T2 為超音波訊號開始回傳的時間,T3 為超音波訊號所接收到的時 間,V 為超音波訊號傳播的速度。 藉由紀錄超音波訊號開始發送與超音波訊號回傳時整體所需要的時 間,藉此來計算錨節點與感測節點的距離,故以此錨節點為圓心,錨節點 與未知座標之感測節點 (Unknow Sensor Node) 的距離為半徑繪出一個 圓,測量未知座標之感測節點與三個不同的錨節點則可以繪出三個圓,而 這三個圓所產生出來的交點,即為未知座標之感測節點的位置。 但是實際上,利用訊號傳輸所需要的時間來定位之方法,通常會為了. - 10 -.
(21) 增加定位的準確性,進而裝置成本更加昂貴的高解析度計時器,導致距離 低成本定位方式的目標越來越遠。. 參. 收訊時間差 收訊時間差 (Time Difference of Arrival,TDOA) [5] 是種常被討論的 定位方法之一,其工作原理是藉由使用不同的訊號傳送模組來發送訊號, 藉此來比較其時間差,例如使用無線電訊號模組和超音波訊號模組,我們 都知道無線電訊號傳播的速度遠比超音波訊號傳播的速度更快,對於同樣 以傳送一英呎所需要花的時間來比較,使用超音波訊號模組需要一毫秒的 時間,而使用無線電訊號模組卻只需要一奈秒的時間。 使用此方法,必須先做同步化,使其於相同起點開始傳送,再依照不 同的訊號傳送模組所需要的時間來比較後,最後求得其距離。. ((T3 − T1 ) − (T2 − T0 )) * (. VRF * VUS ) VRF − VUS. (2). 如數學式子(2),T0 為無線電訊號所發出的時間,T1 為無線電訊號所 接收到的時間,T2 為超音波訊號所發出的時間,T3 為超音波訊號所接收到 的時間,VRF 為無線電訊號傳播的速度,VUS 為超音波訊號傳播的速度。 如圖 4,T0 為無線電訊號所發出的時間,T1 為無線電訊號所接收到的 時間,T2 為超音波訊號所發出的時間,T3 為超音波訊號所接收到的時間; 以此錨節點為圓心,錨節點與未知座標之感測節點的距離為半徑繪出一個. - 11 -.
(22) 圓,測量未知座標之感測節點與三個不同的錨節點則可以繪出三個圓,而 這三個圓所產生出來的交點,即為未知座標之感測節點的位置。. 圖 4. 收訊時間差圖. 肆. 收訊強度法 收訊強度法 (Received Signal Strength,RSS) [6] 是種常被討論的定位 方法之ㄧ,其工作原理是藉由當無線電訊號在傳輸的過程中,訊號的強度 會隨著與錨節點的距離增加而逐漸減弱,故測量感測節點所接收到的訊號 強度即可推算出距離,欲利用此方法進行定位,須事先建構出該環境的傳 輸損失模型,才能夠藉由訊號強度的衰減程度來決定錨節點與感測節點的 距離。 以此錨節點為圓心,錨節點與未知座標之感測節點的距離為半徑繪出 一個圓,測量未知座標之感測節點與三個不同的錨節點則可以繪出三個 圓,而這三個圓所產生出來的交點,即為未知座標之感測節點的位置。. - 12 -.
(23) 伍. 收訊角度法 收訊角度法 (Angle of Arrival , AOA) 是種常被討論的定位方法之 ㄧ,其工作原理是利用基地台測量訊號抵達的方位角來定位,因此必須在 基地台裝設指向性的天線或是天線陣列,藉此確定感測節點相對於基地台 的方位角,如圖 5,當兩個基地台同時測量到由感測節點所發出的訊號, 其測位線的交點即為感測節點的位置。. 圖 5. 收訊角度法圖 該定位方法的誤差來源包括了系統本身角度解析度造成的誤差,以及 多重路徑效應 (Multipath Propagation Effect) 所造成的誤差,但是在兩者 相比較之下,主要的誤差來源則為多重路徑效應。 多重路徑效應的產生,是因為對建築物或是其它障礙物的反射敏感, 錯誤計算訊號入射的角度,進而影響了定位的準確性,故在密集的都會地 區並不適用,假若在郊區或是次都會區中,則可以得到較佳的準確性,但. - 13 -.
(24) 是過遠的距離也會導致準確性下降;另一個缺點是建置成本過高,因為需 要在每個基地台都裝設天線陣列,故較難被系統商所接受;其優點為兩個 基地台即可定位、基地台之間無需時間同步化。. 陸. DV-Hop 無線感測網路的節點定位技術,在無範圍基礎方面,以 DV-Hop [7][8] 為例,利用計算跳躍數 (Hop) 的方式,計算出錨節點之間的距離,並且 得知每個錨節點的跳躍平均數 (HopSize),則錨節點與感測節點的距離即 為跳躍數乘上跳躍平均數。 第一步,錨節點對外廣播自己的訊息,訊息裡包含了自己的座標、編 號和跳躍數的初始值,並且將跳躍數的初始值設定為 0,當感測節點接收 到訊息,則自動在自己的錨節點列表裡做儲存,同時將訊息的跳躍數加 1 後,再將它傳送出去;假若發生同一個感測節點接收到來自同一個錨節點 的訊息,但是跳躍數卻不相同,則選取跳躍數較小的為基準,而將跳躍數 較大的將它視為不正確的訊息並且將它丟棄,透過這個機制,方可確保錨 節點與感測節點之間,可以達到擁有最小跳躍數的條件。 第二步,當錨節點得知自己與其它錨節點的跳躍數,此時依照兩點距 離公式,計算出自己與其它錨節點的所有距離總和,除上自己與其它錨節 點的跳躍數總和,則可以計算出自己的跳躍平均數;如數學式子 (3) ,. (X i , Yi ) 為錨節點 i 的座標, (X j , Yj ) 為錨節點 j 的座標, H i, j 為錨節點 i 與 - 14 -.
(25) 錨節點 j 的跳躍數。. HopSize i =. ∑ j≠ i. (X i − X j ) 2 + (Yi − Y j ) 2 (3). ∑ H i, j j≠ i. 圖 6. DV-Hop 範例圖 如圖 6,錨節點 A 的跳躍平均數為 (40 + 100) (2 + 6) = 17.5、錨節點 B 的跳躍平均數為. (40 + 75) (2 + 5) = 16.42 、錨節點. C 的跳躍平均數為. (100 + 75) (6 + 5) = 15.90 。 第三步,錨節點對外廣播自己的跳躍平均數,而感測節點都只會儲存 自己最優先接收到的跳躍平均數,同時感測節點將會繼續傳送它所接收到 的跳躍平均數給它附近的感測節點,透過這個機制,則可以得知錨節點與 感測節點的距離,即為跳躍數乘上跳躍平均數;如數學式子(4)。. - 15 -.
(26) Distance = Hop * HopSize. (4). 如圖 6,此感測節點,因為距離錨節點 B 只有兩個跳躍數,所以理論 上會最優先接收到來自於錨節點 B 的跳躍平均數,所以將採用錨節點 B 的跳躍平均數 (16.42) 為基準,再分別計算出此感測節點與錨節點 A、錨 節點 B、錨節點 C 的距離,此感測節點與錨節點 A 的距離為 3 ∗ 16.42 、 此感測節點與錨節點 B 的距離為 2 ∗ 16.42 、此感測節點與錨節點 C 的距 離為 3 ∗ 16.42 。 最後,以此錨節點為圓心,錨節點與未知座標之感測節點的距離為半 徑繪出一個圓,測量未知座標之感測節點與三個不同的錨節點則可以繪出 三個圓,而這三個圓所產生出來的交點,即為未知座標之感測節點的位置。. 柒. ECHO ECHO 定位方式,是由 Naveen Sastry [9] 等學者所提出來的一種方 法,其工作原理是藉由使用無線電訊號和超音波訊號來確保安全上之定 位,藉此來判斷錨節點與感測節點的距離是否有異常。 如圖 7 ,感測節點先以無線電訊號傳送需求訊息 (Request) 給錨節 點,當錨節點在接收到訊息的時候,錨節點將同樣的以無線電訊號回傳一 個 N 值 (Arbitrary Value) 給感測節點,並且同時啟動時間計時器,隨後當 感測節點接收到此 N 值時,再以超音波訊號回傳給錨節點,藉此來判斷 錨節點與感測節點的距離是否有異常。 - 16 -.
(27) 圖 7. ECHO 範例圖. 捌. SeRLoc Secure Range Independent Localization (SeRLoc) 定 位 方 式 , 是 由 Loukas Lazos [10] 等學者所提出來的一種方法,其工作原理是藉由錨節點 透過指向性天線來確保安全上之定位。. 圖 8. SeRLoc 範例圖 - 17 -.
(28) 如圖 8,L1、L2、L3、L4 為錨節點,錨節點透過指向性天線,傳送屬 於自己的訊息,當感測節點假若收到來自於這四個錨節點的訊息,則可以 表示感測節點的位置是處於共同覆蓋區域內。. 玖. LAD Localization Anomaly Detection (LAD) 定位方式,是由 Wenliang Du [11] 等學者所提出來的一種方法,是一種用來偵測感測節點的位置是否有 發生異常的安全上之定位,其工作原理是藉由須事先知道感測節點的放置 位置和分組情況,才能利用此資訊來比對目前所測量到的感測節點位置是 否有異常。. - 18 -.
(29) 第二節 改善 DV-Hop 相關研究之探討 壹. Weighted Least Square Method 相關文獻中,Xie Chuan [12] 提出了關於無線感測網路的節點定位問 題之想法,其工作原理是藉由 Weighting Least Squares Method 和 Network. Conflict 來計算感測節點的地理位置。 Weighting Least Squares Method 就是根據 Literature [13] 所提出的接 收訊號強度指示特性來做改善,對於感測節點而言,假若接收到的訊號強 度指示值較大時,則表示錨節點與感測節點的距離較為相近,相對的,假 若接收到的訊號強度指示值較小時,則表示錨節點與感測節點的距離較為 遠離,因此可以利用這個觀念來建造權重值,藉由權重值的大小來篩選錨 節點,藉此獲得與感測節點最為相近的錨節點。. Network Conflict 就是選取與感測節點最為相近的三個錨節點之跳躍 平均數,分別使用自己的跳躍平均數計算出三組新的座標,分別為. (x , y ) 、 (x 1. 1. 2. , y 2 )、 (x 3 , y 3 ),最後再利用這三組新的座標,計算出最終所預. 估的座標 (X, Y ) ;如數學式子(5)。. X=. (x 1 + x 2 + x 3 ) (y + y 2 + y 3 ) ; Y= 1 3 3. (5). 貳. Reduced Node Location Error 相關文獻中,Hongyang Chen [14] 等學者提出了關於無線感測網路的. - 19 -.
(30) 節點定位問題之想法,藉此方法達到更準確的定位,同時並不會增加通訊 的流量 (Communication Traffic) 和運算的複雜性(Computing Complexity)。 第一步,錨節點將採取 DV-Hop 的方式,計算出自己的跳躍平均數, 再對外廣播此訊息;如數學式子(6),i、j 為錨節點, HopSize i 為錨節點 i 的跳躍平均數, Hop i, j 為錨節點 i 與錨節點 j 的跳躍數,此時可以得知錨節 點 i 與錨節點 j 的預估距離為錨節點 i 的跳躍平均數乘上錨節點 i 與錨節點. j 的跳躍數。 Distance i,estj = HopSize i * Hop i, j. (6). 第二步,如數學式子(7), (X i , Yi ) 為錨節點 i 的座標, (X j , Yj ) 為錨節 點 j 的座標,依照兩點距離公式,則可以得知錨節點 i 與錨節點 j 的實際 直線距離。. Distance i,truej = (x i − x j ) 2 + (y i − y j ) 2. (7). 第三步,如數學式子(8),根據數學式子(6)和數學式子(7),則可以推 算出距離的誤差值,即為 Error i, j 。. Error i, j = Distance i.jest − Distance i,truej. (8). 最後,利用數學式子(8)計算出改良後的跳躍平均數;如數學式子(9),. HopSize i 為錨節點 i 的跳躍平均數,Error i, j 為錨節點 i 與錨節點 j 的距離誤 差值, Hop i, j 為錨節點 i 與錨節點 j 的跳躍數。. - 20 -.
(31) HopSize. i, j eff. Error i, j = HopSize i − Hop i, j. (9). 參. Selective Anchor Node Localization Algorithm 相關文獻中,Shuang Tian [15] 提出了關於無線感測網路的節點定位 問題之想法,其工作原理是藉由選擇不同錨節點的組合方式,產生了多組 感測節點的預估位置,再經由篩選來達到更準確的定位。. 圖 9. SANLA 範例圖 第一步,錨節點將採取 DV-Hop 的方式,計算出自己的跳躍平均數, 再對外廣播此訊息,此時將觀察感測節點最優先接收到的訊息是來自於哪 個錨節點,則令此錨節點為此感測節點的參考點 (Reference Node);如圖. 9,A 點為未知座標之感測節點,L1、L2、L3、L4、L5 為錨節點,假設感 測節點 A 最優先接收到來自於錨節點 L1 的訊息,則令錨節點 L1 為感測節 - 21 -.
(32) 點 A 的參考點。 第二步,從錨節點列表裡面,將以此參考點為主,再依序選取任意其 它兩個錨節點為輔,此錨節點 (參考點) 必須為任意三個錨節點中的其中 一點;以此錨節點為圓心,錨節點與未知座標之感測節點的距離為半徑繪 出一個圓,測量未知座標之感測節點與三個不同的錨節點則可以繪出三個 圓,而這三個圓所產生出來的交點,即為未知座標之感測節點的位置,以 此類推,將可以推算出多組感測節點的預估位置,分別為 A1、A2、A3、. A4、A5、A6。. 圖 10. SANLA 反向推算圖 第三步,如圖 10,將運用反向推算的方法,假設參考點 (L1) 為未知 座標之錨節點,而原先未知座標之感測節點 A 為已知座標之感測節點, 再結合剛剛所推算出來的感測節點預估位置 (A1、A2、A3、A4、A5、A6), 將分別以此感測節點為主,再依序選取任意其它兩個錨節點為輔,此感測 節點必須為任意三個錨節點中的其中一點;以此錨節點為圓心,錨節點與 未知座標之錨節點的距離為半徑繪出一個圓,測量未知座標之錨節點與三. - 22 -.
(33) 個不同的錨節點則可以繪出三個圓,而這三個圓所產生出來的交點,即為 未知座標之錨節點的位置,以此類推,將可以推算出多組未知座標之錨節 點的預估位置,分別為 L11、L12、L13、L14、L15、L16。. (X real − X) 2 + (Yreal − Y) 2 * 100% Error = X real + Yreal. (10). 第四步,如數學式子(10), (X real , Yreal ) 為錨節點實際的座標, (X, Y ) 為 新的錨節點預估座標,依此範例來看, (X real , Yreal ) 就是錨節點 (L1) 的座 標,而 (X, Y ) 為 L11、L12、L13、L14、L15、L16 的錨節點預估座標,藉由套 用數學式子(10)來取得最小的誤差值,而當誤差值越小時,則表示推算出 的錨節點位置越接近實際上的錨節點位置。 最後,再依所計算出的誤差值最小那一組座標,而選取出感測節點的 預估座標。. - 23 -.
(34) 第三章 改良演算法 第一節 演算法構想 針對無線感測網路的節點定位問題,本篇論文所提出的定位方法, 採用了無範圍基礎分類上之 DV-Hop 為主體的構想來做改善,同時結合了 新的跳躍平均數選取計算的概念,而依照跳躍平均數選取計算的方式,又 可以區分成最短錨節點距離法 (Shortest Anchor Distance Algorithm,SADA) 和平均錨節點距離法 (Average Anchor Distance Algorithm ,AADA),最終 再分別結合 Selective Anchor Node Localization Algorithm 的概念 [15],藉 此達到更準確的地理位置之定位方法。 第一步,如同於 DV-Hop 的方式,錨節點對外廣播自己的訊息,訊息 裡包含了自己的座標、編號和跳躍數的初始值,並且將跳躍數的初始值設 定為 0,當感測節點接收到訊息,則自動在自己的錨節點列表裡做儲存, 同時將訊息的跳躍數加 1 後,再將它傳送出去;假若發生同一個感測節點 接收到來自同一個錨節點的訊息,但是跳躍數卻不相同,則將選取跳躍數 較小的為基準,而將跳躍數較大的將它視為不正確的訊息並且將它丟棄, 透過這個機制,方可確保錨節點與感測節點之間,可以達到擁有最小跳躍 數的條件。 當錨節點得知自己與其它錨節點的跳躍數,此時依照兩點距離公式, 計算出自己與其它錨節點的所有距離總和,除上自己與其它錨節點的跳躍. - 24 -.
(35) 數總和,則可以計算出自己的跳躍平均數;如數學式子(11), (X i , Yi ) 為錨 節點 i 的座標, (X j , Yj ) 為錨節點 j 的座標, H i, j 為錨節點 i 與錨節點 j 的跳 躍數。. HopSize i =. ∑ j≠ i. (X i − X j ) 2 + (Yi − Y j ) 2. ∑ H i, j. (11). j≠ i. 第二步,依照跳躍平均數選取計算的方式,可以區分成最短錨節點距 離法 (SADA) 和平均錨節點距離 (AADA)。. SADA 的跳躍平均數選取計算方式如下,對於計算其兩點之間 (錨節 點與感測節點) 的距離,我們將做一些改變,不同於使用 DV-Hop 所採取 的單一跳躍平均數,取而代之的是對於感測節點而言,要計算其與不同錨 節點的距離,將採用不同錨節點的跳躍平均數為基準。. 圖 11. HopSize 選取圖 - 25 -.
(36) 如圖 11,錨節點 A 的跳躍平均數為 (40 + 100) (2 + 6) = 17.5 、錨節點. B 的跳躍平均數為 (40 + 75) (2 + 5) = 16.42 、錨節點 C 的跳躍平均數為. (100 + 75) (6 + 5) = 15.90;此感測節點與錨節點 A 的距離為. 3 ∗ 17.5、此感. 測節點與錨節點 B 的距離為 2 ∗ 16.42 、此感測節點與錨節點 C 的距離為. 3 ∗ 15.90 。 AADA 的跳躍平均數選取計算方式如下,藉由數學式子(11)所計算出 來的跳躍平均數,將累加其總和後再除上錨節點數量的總和,此值則為改 良後的跳躍平均數;如數學式子(12),HopSize i 為錨節點 i 的跳躍平均數,. n 為錨節點數量的總和;如數學式子(13),為其兩點之間 (錨節點與感測 節點) 的距離。. HopSize ave =. ∑ HopSize. i. n. Distance = Hop * HopSize ave. (12) (13). 第三步,分別結合 SANLA 的概念,錨節點將採用改良後的跳躍平均 數,再對外廣播此訊息,此時將觀察感測節點最優先接收到的訊息是來自 於哪個錨節點,則令此錨節點為此感測節點的參考點,如圖 12,A 點為 未知座標之感測節點,L1、L2、L3、L4、L5 為錨節點,假設感測節點 A 最 優先接收到來自於錨節點 L1 的訊息,則令錨節點 L1 為感測節點 A 的參考 點。. - 26 -.
(37) 圖 12. 感測節點分布圖 從錨節點列表裡面,將以此參考點為主,再依序選取任意其它兩個錨 節點為輔,此錨節點 (參考點) 必須為任意三個錨節點中的其中一點;而 對於計算其兩點之間 ( 錨節點與感測節點 ) 的距離,將採用 SADA 和. AADA 兩種改良後的跳躍平均數來做運算。 以此錨節點為圓心,錨節點與未知座標之感測節點的距離為半徑繪出 一個圓,測量未知座標之感測節點與三個不同的錨節點則可以繪出三個 圓,而這三個圓所產生出來的交點,即為未知座標之感測節點的位置,以 此類推,將可以推算出多組感測節點的預估位置,分別為 A1、A2、A3、. A4、A5、A6。. - 27 -.
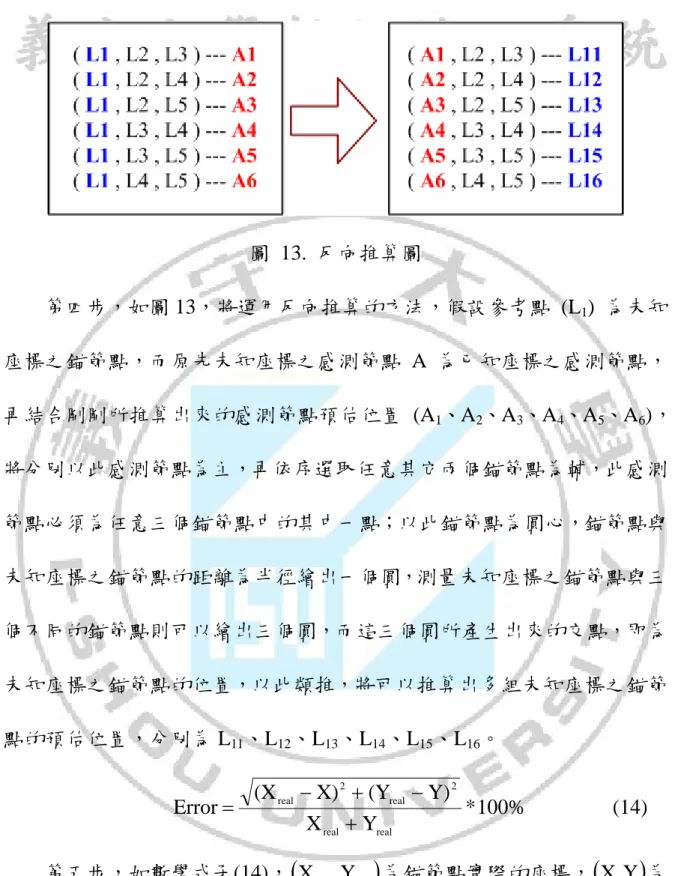
(38) 圖 13. 反向推算圖 第四步,如圖 13,將運用反向推算的方法,假設參考點 (L1) 為未知 座標之錨節點,而原先未知座標之感測節點 A 為已知座標之感測節點, 再結合剛剛所推算出來的感測節點預估位置 (A1、A2、A3、A4、A5、A6), 將分別以此感測節點為主,再依序選取任意其它兩個錨節點為輔,此感測 節點必須為任意三個錨節點中的其中一點;以此錨節點為圓心,錨節點與 未知座標之錨節點的距離為半徑繪出一個圓,測量未知座標之錨節點與三 個不同的錨節點則可以繪出三個圓,而這三個圓所產生出來的交點,即為 未知座標之錨節點的位置,以此類推,將可以推算出多組未知座標之錨節 點的預估位置,分別為 L11、L12、L13、L14、L15、L16。. (X real − X) 2 + (Yreal − Y) 2 * 100% Error = X real + Yreal. (14). 第五步,如數學式子(14), (X real , Yreal ) 為錨節點實際的座標, (X, Y ) 為 新的錨節點預估座標,依此範例來看, (X real , Yreal ) 就是錨節點 (L1) 的座 標,而 (X, Y ) 為 L11、L12、L13、L14、L15、L16 的錨節點預估座標,藉由套 用數學式子(14)來取得最小的誤差值,而當誤差值越小時,則表示推算出 - 28 -.
(39) 的錨節點位置越接近實際上的錨節點位置。 最後,再依所計算出的誤差值最小那一組座標,而選取出感測節點的 預估座標。 此外,誤差值的定義,將以實際上的座標與預估出來的座標來做比 較,依照兩點距離公式,則可以計算出此誤差值。. - 29 -.
(40) 第二節 演算法步驟 壹. 最短錨節點距離法 (SADA) (1)在一個長寬距離都為 L 的的正方形區域內,佈建 M 個錨節點和 N 個感測節點,而錨節點與感測節點的感測範圍都為 R,再依亂數分別產生 錨節點與感測節點的座標。. (2)依照兩點距離公式,計算出錨節點之間的距離;同樣依照兩點距離 公式,計算出感測節點之間的距離。. (3)建造錨節點列表:例如要建造錨節點 I 列表,其列表儲存著錨節點 I 的鄰居點數量與編號,也就是感測節點的數量與編號,而成為鄰居點的 條件判斷為依照兩點距離公式,假若錨節點 I 與感測節點 i 的距離<=R, 也就是 1 個跳躍數,則條件成立。. (4)建造感測節點列表:例如要建造感測節點 i 列表,其列表儲存著感 測節點 i 的鄰居點數量與編號,也就是感測節點的數量與編號,而成為鄰 居點的條件判斷為依照兩點距離公式,假若感測節點 i 與感測節點 j 的距 離<=R,也就是 1 個跳躍數,則條件成立。. (5)建造錨節點與感測節點的最小跳躍數:其方法則是採用(3)(4)來運 算,例如要計算錨節點 I 與感測節點 k 的最小跳躍數,先使用錨節點 I 列 表計算出 1 個跳躍數的感測節點 i,接著再使用感測節點 i 列表計算出 2 個跳躍數的感測節點 j,以此類推,將可以建造出錨節點 I 與感測節點 k. - 30 -.
(41) 的最小跳躍數。. (6)建造錨節點之間的跳躍數:假若錨節點 I 與錨節點 J 的距離>R,其 方法則是採用(5)來運算,例如要計算錨節點 I 與錨節點 J 的跳躍數,假若 錨節點 J 的 1 個跳躍數鄰居點為感測節點 i,則優先採用(5)得知錨節點 I 與感測節點 i 的最小跳躍數,此時將此數值加 1,則可計算出錨節點 I 與 錨節點 J 的跳躍數;假若錨節點 I 與錨節點 J 的距離<=R,則跳躍數為 1。. (7)建造錨節點的跳躍平均數:其方法則是採用(2)(6)來運算,例如要 計算錨節點 I 的跳躍平均數,則計算錨節點 I 與其它錨節點的所有距離總 和,除上錨節點 I 與其它錨節點的跳躍數總和,則可以計算出錨節點 I 的 跳躍平均數。. (8)建造感測節點最為相近的錨節點:其方法則是採用(5)結合排序來 運算,則可以計算出感測節點最為相近的錨節點。. (9)建造 SADA 的跳躍平均數:其方法則是採用(7)(8)來運算,例如對 於感測節點 i 而言,採用(8)可以得知最為相近的錨節點分別為 I、J、K, 要計算其與不同錨節點的距離,將採用不同錨節點的跳躍平均數為基準, 例如對於錨節點 I 而言,則選取錨節點 I 的跳躍平均數、對於錨節點 J 而 言,則選取錨節點 J 的跳躍平均數、對於錨節點 K 而言,則選取錨節點 K 的跳躍平均數。. (10)建造錨節點與感測節點的距離:其方法則是採用(5)(8)(9)來運算,. - 31 -.
(42) 藉由(5)取得錨節點與感測節點的最小跳躍數、(8)取得感測節點最為相近 的錨節點、(9)取得 SADA 的跳躍平均數,將其做整合則可以計算出錨節 點與感測節點的距離。. (11)建造感測節點的預估位置:其方法則是採用(8)(10)來運算,例如 採用錨節點 I、錨節點 J、錨節點 K 來計算感測節點的預估位置,分別計 算出任兩圓相交點的中心點,也就是錨節點 I 圓與錨節點 J 圓的交點取中 心點、錨節點 I 圓與錨節點 K 圓的交點取中心點、錨節點 J 圓與錨節點 K 圓的交點取中心點,再藉由這三點求平均值取出其中心點,此點則為感測 節點的預估位置;假若發生任兩圓沒有交點的事件,則藉由其它有交點的 中心點取其中心點,則令此點為感測節點的預估位置;假若發生圓與圓之 間都無交點的事件,則令感測節點的預估座標為 (0,0 ),並且不列入錯誤率 的比較項目。. (12)篩選感測節點的預估位置:其方法則是採用(11)所推算出來的感 測節點預估位置,將運用反向推算的方法,取得錨節點 (參考點) 的預估 位置,藉由數學式子(15)來取得最小的誤差值,(X real , Yreal ) 為錨節點實際的 座標, (X, Y ) 為新的錨節點預估座標,而當誤差值越小時,則表示推算出 的錨節點位置越接近實際上的錨節點位置,進而篩選出感測節點的最佳預 估位置。. - 32 -.
(43) (X real − X) 2 + (Yreal − Y) 2 * 100% Error = X real + Yreal. (15). 貳. 平均錨節點距離法 (AADA) (1)在一個長寬距離都為 L 的的正方形區域內,佈建 M 個錨節點和 N 個感測節點,而錨節點與感測節點的感測範圍都為 R,再依亂數分別產生 錨節點與感測節點的座標。. (2)依照兩點距離公式,計算出錨節點之間的距離;同樣依照兩點距離 公式,計算出感測節點之間的距離。. (3)建造錨節點列表:例如要建造錨節點 I 列表,其列表儲存著錨節點 I 的鄰居點數量與編號,也就是感測節點的數量與編號,而成為鄰居點的 條件判斷為依照兩點距離公式,假若錨節點 I 與感測節點 i 的距離<=R, 也就是 1 個跳躍數,則條件成立。. (4)建造感測節點列表:例如要建造感測節點 i 列表,其列表儲存著感 測節點 i 的鄰居點數量與編號,也就是感測節點的數量與編號,而成為鄰 居點的條件判斷為依照兩點距離公式,假若感測節點 i 與感測節點 j 的距 離<=R,也就是 1 個跳躍數,則條件成立。. (5)建造錨節點與感測節點的最小跳躍數:其方法則是採用(3)(4)來運 算,例如要計算錨節點 I 與感測節點 k 的最小跳躍數,先使用錨節點 I 列 表計算出 1 個跳躍數的感測節點 i,接著再使用感測節點 i 列表計算出 2. - 33 -.
(44) 個跳躍數的感測節點 j,以此類推,將可以建造出錨節點 I 與感測節點 k 的最小跳躍數。. (6)建造錨節點之間的跳躍數:假若錨節點 I 與錨節點 J 的距離>R,其 方法則是採用(5)來運算,例如要計算錨節點 I 與錨節點 J 的跳躍數,假若 錨節點 J 的 1 個跳躍數鄰居點為感測節點 i,則優先採用(5)得知錨節點 I 與感測節點 i 的最小跳躍數,此時將此數值加 1,則可計算出錨節點 I 與 錨節點 J 的跳躍數;假若錨節點 I 與錨節點 J 的距離<=R,則跳躍數為 1。. (7)建造錨節點的跳躍平均數:其方法則是採用(2)(6)來運算,例如要 計算錨節點 I 的跳躍平均數,則計算錨節點 I 與其它錨節點的所有距離總 和,除上錨節點 I 與其它錨節點的跳躍數總和,則可以計算出錨節點 I 的 跳躍平均數。. (8)建造感測節點最為相近的錨節點:其方法則是採用(5)結合排序來 運算,則可以計算出感測節點最為相近的錨節點。. (9)建造 AADA 的跳躍平均數:其方法則是採用(7)來運算,累加跳躍 平均數的總和後再除上錨節點數量的總和,此值則為 AADA 的跳躍平均 數。. (10)建造錨節點與感測節點的距離:其方法則是採用(5)(8)(9)來運算, 藉由(5)取得錨節點與感測節點的最小跳躍數、(8)取得感測節點最為相近 的錨節點、(9)取得 AADA 的跳躍平均數,將其做整合則可以計算出錨節. - 34 -.
(45) 點與感測節點的距離。. (11)建造感測節點的預估位置:其方法則是採用(8)(10)來運算,例如 採用錨節點 I、錨節點 J、錨節點 K 來計算感測節點的預估位置,分別計 算出任兩圓相交點的中心點,也就是錨節點 I 圓與錨節點 J 圓的交點取中 心點、錨節點 I 圓與錨節點 K 圓的交點取中心點、錨節點 J 圓與錨節點 K 圓的交點取中心點,再藉由這三點求平均值取出其中心點,此點則為感測 節點的預估位置;假若發生任兩圓沒有交點的事件,則藉由其它有交點的 中心點取其中心點,則令此點為感測節點的預估位置;假若發生圓與圓之 間都無交點的事件,則令感測節點的預估座標為 (0,0 ),並且不列入錯誤率 的比較項目。. (12)篩選感測節點的預估位置:其方法則是採用(11)所推算出來的感 測節點預估位置,將運用反向推算的方法,取得錨節點 (參考點) 的預估 位置,藉由數學式子(16)來取得最小的誤差值,(X real , Yreal ) 為錨節點實際的 座標, (X, Y ) 為新的錨節點預估座標,而當誤差值越小時,則表示推算出 的錨節點位置越接近實際上的錨節點位置,進而篩選出感測節點的最佳預 估位置。. (X real − X) 2 + (Yreal − Y) 2 * 100% Error = X real + Yreal. - 35 -. (16).
(46) 第四章 模擬與分析 作業系統. Microsoft Windows XP Professional Service Pack 3. 中央處理器. Intel(R) Core(TM)2 Duo CPU E4600,2.40 GHz. 記憶體. SDRAM DDR II 800,3 GB. 模擬平台. Microsoft Visual C++ 6.0 表格 1. 模擬環境相關設備. 區域大小. 100 公尺 * 100 公尺. 錨節點數量. 10 個、15 個、20 個、25 個、30 個. 感測節點數量. 50 個、100 個、150 個. 感測範圍. 20 公尺、30 公尺. 節點佈建方式. 隨機放置 表格 2. 模擬環境相關參數. 演算法. DV-Hop、SANLA、SADA、AADA. Error. 實際座標和預估座標的差值. Error / Range. 實際座標和預估座標的差值 / 感測範圍. 實驗數據. 實驗數據均為模擬 10 次後,取其平均值 表格 3. 圖表相關比較內容. - 36 -.
(47) Anchor. Method. DV-Hop. SANLA. SADA. AADA. 10. Error E/Range. 45.263 2.2631. 34.476 1.7238. 22.261 1.1130. 21.607 1.0803. 15. Error E/Range. 36.743 1.8371. 26.345 1.3172. 19.586 0.9793. 18.473 0.9236. 20. Error E/Range. 36.379 1.8189. 22.745 1.1372. 17.724 0.8862. 16.503 0.8251. 25. Error E/Range. 33.121 1.6560. 22.917 1.1458. 16.211 0.8105. 15.133 0.7566. 30. Error E/Range. 29.725 1.4862. 19.997 0.9998. 15.407 0.7703. 13.114 0.6557. 表格 4. 感測節點數量為 50 個、感測範圍為 20 公尺 Anchor. Method. DV-Hop. SANLA. SADA. AADA. 10. Error E/Range. 39.828 1.3276. 31.946 1.0648. 26.871 0.8957. 25.345 0.8448. 15. Error E/Range. 34.171 1.1390. 26.379 0.8793. 19.732 0.6577. 19.723 0.6574. 20. Error E/Range. 33.961 1.1320. 24.341 0.8113. 17.843 0.5947. 17.731 0.5910. 25. Error E/Range. 26.311 0.8770. 22.271 0.7423. 15.983 0.5327. 15.342 0.5114. 30. Error E/Range. 25.032 0.8344. 20.625 0.6875. 16.222 0.5407. 15.742 0.5247. 表格 5. 感測節點數量為 50 個、感測範圍為 30 公尺. - 37 -.
(48) Anchor. Method. DV-Hop. SANLA. SADA. AADA. 10. Error E/Range. 35.827 1.7913. 26.845 1.3422. 21.256 1.0628. 19.364 0.9682. 15. Error E/Range. 34.154 1.7077. 25.488 1.2744. 19.021 0.9510. 18.289 0.9144. 20. Error E/Range. 30.861 1.5430. 20.087 1.0043. 14.402 0.7201. 14.125 0.7062. 25. Error E/Range. 29.297 1.4648. 19.949 0.9974. 14.274 0.7137. 12.673 0.6336. 30. Error E/Range. 26.522 1.3261. 17.493 0.8746. 13.204 0.6602. 12.243 0.6121. 表格 6. 感測節點數量為 100 個、感測範圍為 20 公尺 Anchor. Method. DV-Hop. SANLA. SADA. AADA. 10. Error E/Range. 34.767 1.1589. 26.542 0.8847. 24.102 0.8034. 23.649 0.7982. 15. Error E/Range. 30.002 1.0000. 24.131 0.8043. 19.054 0.6351. 18.432 0.6144. 20. Error E/Range. 29.860 0.9953. 23.510 0.7836. 16.756 0.5585. 16.225 0.5408. 25. Error E/Range. 26.156 0.8718. 22.622 0.7540. 15.957 0.5319. 15.376 0.5125. 30. Error E/Range. 24.774 0.8258. 19.577 0.6525. 15.477 0.5159. 15.248 0.5082. 表格 7. 感測節點數量為 100 個、感測範圍為 30 公尺. - 38 -.
(49) Anchor. Method. DV-Hop. SANLA. SADA. AADA. 10. Error E/Range. 35.390 1.7695. 26.345 1.3172. 20.344 1.0172. 18.699 0.9349. 15. Error E/Range. 33.501 1.6750. 24.725 1.2362. 18.382 0.9191. 16.659 0.8329. 20. Error E/Range. 30.821 1.5410. 19.998 0.9999. 14.395 0.7197. 14.121 0.7060. 25. Error E/Range. 29.201 1.4600. 19.875 0.9937. 14.233 0.7116. 12.643 0.6321. 30. Error E/Range. 26.100 1.3050. 17.421 0.8710. 13.020 0.6510. 11.801 0.5900. 表格 8. 感測節點數量為 150 個、感測範圍為 20 公尺 Anchor. Method. DV-Hop. SANLA. SADA. AADA. 10. Error E/Range. 34.499 1.1499. 25.931 0.8643. 21.199 0.7066. 19.697 0.6565. 15. Error E/Range. 29.380 0.9793. 24.112 0.8037. 19.102 0.6367. 18.495 0.6165. 20. Error E/Range. 28.830 0.9610. 23.273 0.7757. 16.640 0.5546. 16.143 0.5381. 25. Error E/Range. 25.026 0.8342. 19.631 0.6543. 15.827 0.5275. 15.318 0.5106. 30. Error E/Range. 24.413 0.8137. 19.584 0.6528. 15.401 0.5133. 15.201 0.5067. 表格 9. 感測節點數量為 150 個、感測範圍為 30 公尺. - 39 -.
(50) Sensor : 50 Range : 20 50. Error ( Meter ). 40 DV-Hop SANLA. 30. SADA AADA. 20. 10 10. 15. 20. 25. 30. Number of Anchor Nodes. 圖 14. 感測節點數量為 50 個、感測範圍為 20 公尺. Sensor = 50 Range : 30 50. Error ( Meter ). 40 DV-Hop SANLA. 30. SADA AADA. 20. 10 10. 15. 20. 25. 30. Number of Anchor Nodes. 圖 15. 感測節點數量為 50 個、感測範圍為 30 公尺. - 40 -.
(51) Sensor : 100 Range : 20. Error ( Meter ). 40. 30. DV-Hop SANLA SADA AADA. 20. 10 10. 15. 20. 25. 30. Number of Anchor Nodes. 圖 16. 感測節點數量為 100 個、感測範圍為 20 公尺. Sensor : 100 Range : 30. Error ( Meter ). 40. 30. DV-Hop SANLA SADA AADA. 20. 10 10. 15. 20. 25. 30. Number of Anchor Nodes. 圖 17. 感測節點數量為 100 個、感測範圍為 30 公尺. - 41 -.
(52) Sensor : 150 Range : 20. Error ( Meter ). 40. 30. DV-Hop SANLA SADA AADA. 20. 10 10. 15. 20. 25. 30. Number of Anchor Nodes. 圖 18. 感測節點數量為 150 個、感測範圍為 20 公尺. Sensor : 150 Range : 30. Error ( Meter ). 40. 30. DV-Hop SANLA SADA AADA. 20. 10 10. 15. 20. 25. 30. Number of Anchor Nodes. 圖 19. 感測節點數量為 150 個、感測範圍為 30 公尺. - 42 -.
(53) 根據實驗的數據可以得知,當佈建數量較多的錨節點與感測節點時, 對於這四種定位方法來說:DV-Hop、SANLA、SADA、AADA,其定位 的準確性都是成正比提高,原因分析如下。 當佈建數量較多的感測節點時,優點則在於可以提高單位空間內感測 節點的密度,因為感測節點密度的提高,可以確保錨節點之間是有通訊能 力的,因此可以正確的計算出錨節點之間的跳躍數,同時可以確保每個感 測節點至少有能力接收到三個錨節點的訊息,達到定位的標準;圖 14、 圖 15 為佈建 50 個感測節點,圖 16、圖 17 為佈建 100 個感測節點,圖 18、 圖 19 為佈建 150 個感測節點,藉由這三種佈建感測節點的數量來觀察, 可以得知在此模擬區域內,佈建 100 個感測節點的誤差值可以明顯的觀察 出比佈建 50 個感測節點來的小,但是當佈建 150 個感測節點時,其效果 與佈建 100 個感測節點時大同小異,由此可以得知,在此模擬區域內,感 測節點的密度對於降低誤差值的幫助已經達到上限了,假若要取的更優異 的準確性,勢必要從增加錨節點佈建的數量著手了。 當佈建數量較多的錨節點時,優點則在於可以提高單位空間內錨節點 的密度,因為錨節點密度的提高,不僅可以確保每個感測節點至少有能力 接收到三個錨節點的訊息,達到定位的標準,還可以減少錨節點與感測節 點的跳躍數,因為對於同一個感測節點而言,它可以選擇的錨節點更多 了,因此可以選擇與它較為相近的錨節點為基準,執行定位的工作;藉由. - 43 -.
(54) 圖 14、圖 15、圖 16、圖 17、圖 18、圖 19 來觀察,可以得知定位的準確 性與錨節點佈建的數量呈正比。 在無範圍基礎分類上之定位技術,跳躍數與跳躍平均數對於定位的準 確性扮演著很重要的角色,因為跳躍平均數決定了每一次的跳躍數值,而 跳躍數更是決定了預估距離差的誤差值大小,原理則在於計算出的跳躍平 均數或多或少都會有誤差,而誤差將會隨著跳躍數的遞增而將誤差值放 大,進而降低定位的準確性。 根據實驗的數據可以得知, SADA 和 AADA 的定位準確性確實比. DV-Hop 和 SANLA 的定位準確性來的優異,原因則在於跳躍數和跳躍平 均數上。 根據跳躍平均數來觀察,DV-Hop 和 SANLA 都只有採用單一的跳躍 平均數為基準,來執行定位的工作,所以可以很明確的了解到,對於感測 節點而言,此跳躍平均數的準確性,直接決定了此次定位的準確性;SADA 採用了三個不同的跳躍平均數為基準、AADA 則採用全體跳躍平均數的平 均值為基準,對於 DV-Hop 和 SANLA 都只有採用單一的跳躍平均數為基 準來比較,此方法可以降低因跳躍平均數的準確性與否所帶來的風險,因 此可以提升定位的準確性。 根據跳躍數來觀察,跳躍次數的多寡,是藉由感測範圍所決定的,當 感測範圍大時,那麼節點之間的跳躍數就少,而當感測範圍小時,那麼節. - 44 -.
(55) 點之間的跳躍數就多,所以根據這個原理,對於不同採用跳躍平均數的方 法,再加上節點之間的跳躍次數多時,因此誤差值都相對的會被放大,所 以對於 DV-Hop、SANLA、SADA、AADA 定位的準確性,就更加顯而易 見了。. - 45 -.
(56) 第五章 結論與未來展望 本篇論文所提出的定位方法:最短錨節點距離法和平均錨節點距離 法,在無線感測網路的節點定位問題上,確實有提升定位的準確性,而定 位的準確性與單位空間內錨節點佈建的數量、感測節點佈建的數量、感測 範圍的大小有密切的關係。 最短錨節點距離法和平均錨節點距離法在進行定位的過程中,都運用 了反向推算的概念,因為進行了篩選感測節點的工作,所以可以提升定位 的準確性。 同理可證,藉由採納更多的錨節點來進行運算,可以推算出更多組的 感測節點預估位置,此時可以篩選的感測節點就更多了,因此更加可以提 升定位的準確性;但是相對的,採用此方法勢必會增加每個節點的運算次 數,當運算次數一多,也就會消耗更多的能量。 因此想要將最短錨節點距離法和平均錨節點距離法應用於實作上的 想法,勢必要考量運算的能源成本,因此在未來的研究中,將會著重於在 定位的準確性和運算的能源成本上,取得一個最佳的平衡點。. - 46 -.
(57) 參考文獻 [1] I.F. Akyildiz, W. Su, Y. Sankarasubramaniam and E. Cayirci, “Wireless Sensor Networks: A Survey”, Computer Networks Journal, No. 38, pp. 393-422, 2002. [2] I.F. Akyildiz, W. Su, Y. Sankarasubramaniam and E. Cayirci, “A Survey on Sensor Networks”, IEEE Communications Magazine, Vol. 40, No. 8, pp. 102-114, 2002. [3] http://www.xbow.com/ [4] http://www.gps.gov/ [5] H. Karl and A. Willig, “Localization and positioning”, Protocols and Architecture for Wireless Sensor Network, Vol. 9, pp. 232-249, 2005. [6] N. Patwari, J.N. Ash, S. Kyperountas, A.O. Hero, R.L. Moses and N.S. Correal, “Locating the Nodes: Cooperative Localization in Wireless Sensor Networks”, IEEE Signal Processing Magazine, Vol. 22, No. 4, pp. 54-69, 2005. [7] D. Niculescu and B. Nath, “Ad Hoc Positioning System(APS)”, IEEE Conference on Global Telecommunications(GLOBECOM), Vol. 5, pp. 25-29, 2001. [8] D. Niculescu and B. Nath, “DV Based Positioning in Ad Hoc Network”, Telecommunication Systems, Vol. 22, No. 1-4, pp. 267-280, 2003. [9] N. Sastry, U. Shanker and D. Wanger, “Secure Verification of Location Claims”, ACM Workshop on Wireless Security(WiSe), pp. 1-10, 2003. [10] L. Lazos and R. Poovendran, “SeRLoc: Secure Range Independent Localization for Wireless Sensor Networks”, ACM Workshop on Wireless Security(WiSe), pp. 21-30, 2004. [11] W. Du, L. Fang and N. Peng, “LAD: Localization Anomaly Detection for wireless Sensor Networks”, Journal of Parallel and Distributed Computing,. - 47 -.
(58) pp. 874-886, 2006. [12] X. Chuan, “Research on Improved DV-HOP Localization Algorithm Based on Weighted Least Square Method”, IEEE International Symposium on Knowledqe Acquisition and Modeling Workshop (KAM Workshop), pp. 773-776, 2008. [13] C. Weike, L. Wenfeng, S. Heng and Y. Bing, “Weighted Centroid Algorithm Based on RSSI of the Wireless Sensor Network”, Journal of Wuhan University of Science and Technology, Vol. 30, pp. 265-268, 2006. [14] H. Chen, K. Sezaki, P. Deng and H. Cheung So, “An Improved DV-Hop Localization Algorithm with Reduced Node Location Error for Wireless Sensor Networks”, IEICE Transactions on Fundamentals of Electronics, Communications and Computer Sciences, Vol. E91-A, No. 8, pp. 2232-2236, 2008. [15] S. Tian, X. Zhang, X. Wang, P. Sun and H. Zhang, “Selective Anchor Node Localization Algorithm for Wireless Sensor Networks”, IEEE International Conference on Convergence Information Technology, pp. 358-362, 2007.. - 48 -.
(59)
數據



+4


相關文件
無線感測網路是個人區域網路中的一種應用,其中最常採用 Zigbee 無線通訊協 定做為主要架構。而 Zigbee 以 IEEE802.15.4 標準規範做為運用基礎,在下一小節將 會針對 IEEE
接下來我們將討論切換的機制,因為在我們假設的網路環境下,所以 sink 是保持在接收資料的狀態。網路中所有的感測點都將資料往 sink 端傳送,但是
Selcuk Candan, ”GMP: Distributed Geographic Multicast Routing in Wireless Sensor Networks,” IEEE International Conference on Distributed Computing Systems,
在無線區域網路部份,高傳輸速度的要求,讓 IEEE 802.11a 成為矚目 的標準。本篇論文主要是以 FPGA 晶片來實現一適合於無限區域網路 IEEE 802.11a
A Wireless Sensor Network is composed by a group of tiny devices with limited energy. Since the number of sensing nodes is usually huge, the sensing nodes are usually on
高容 MLCC 主要是應用於筆記型電腦、手機、個人數位助理 器、無線網路等產品中,在這些終端產品市場的高速成長帶動 下,高容
工作二中若 R4 斷路,則在 R3 與 R4 之間所測得之波形與 B 點所測有 何不同?試簡單說明其原因。.3. 第二章 整流與穩壓電路
其模擬實驗結果圖形與動態之結果相似。其中圖 4-14 至圖 4-16 為在不同 MC 節點比例的環境下,比較群播成員比例對群播會議的波長使用量之影 響,由圖
