1997 IEEE International Conference on Intelligent Processing Systems Octobcr 28
-
3 I. Bcijing, ChinaA Stable Neuro-Fuzzy Controller for Output Tracking in Composite
Nonlinear Systems
Chili-Hsin Tsai* Jing-Sin Liu** Kuo-Bin Tseng** Wei-Song Lin*
*Department of Electrical Engineering
National Taiwan University
Taipei, Taiwan
106, China
Abstract. In this paper, a learnable fuzzy controller IS proposed for on-lme zmplementing a decouplzng control action of uncertaan com- poszte afine nonlinear plants to track a prescribed trajectory. The controller as mainly composed of decentralized fuzzg systems with
embedded two-stages rule credit assignments cascaded with an inter- connections wmpensatzng associative memory network. The con- troller can be parametrazed by a set of linear pammeters, which rep- resent a combznation of of the credits of rules, locataons and shape factors of membershap functions. The parameters are tuned by a deadtone adaptation algonthm. It zs shown that the adaptive fuzzy controller guamntees a given level of attenuataon for tmcking error in the presence of unknown but bounded anterconnectaons and dastur- Dances. Szmulatzon of an inverted pendulum zs gzven to demonstrate the eflectiveness and robustness of the controller.
1
Introduction
In the development of control systems design, there is a major need to build the controllers which are capable of incorporating experts knowledge and containing enough intelligence to perform accuracy tasks in uncertain environments. This requires design of controllers whose architectures and consequent control efforts in response to plant outputs and external commands are related to or resulted from experience, that is, the observed input/output behavior of the plant, rather than by reference to a mathematical model-based description of the plant. The controller is then a so-called intelligent controllcr One emerging methodology in intelligent controllers design is the use of fuzzy logic IZ], [3], mostly due to the fact that fuzzy methods provide an elfcient way to cope with uncertainties and to encode and approximate numerical functions. This methodology has received more recognition recently and there have been a number of successful applications of fuzzy methods to a wide variety of practical problems. However, the majority of fuzzy systems developed so far are static and are designed in an iterative open-loop fashion. Usu-
ally, the designer specifies a fuzzy rule base, and then enters an evaluation/editing design loop (41. Both the performance measures and adaptation strategies are subjective.ln addition, if the ptant dy- namics and the environment change, then the performance of well- designed fuzzy systems will degrade. Therefore, developing auto- matic learning algorithm is needed for on-line adjusting the rule bases of fuzzy systems i n response to variations of operating con- ditions. On the other hand, in view of the promising capab neural networks in learning, adaptation, fault tolerance, parallelism and generalization, efforts have been made to integrate the fuzzy logic and neural networks into a unified framework. The approach is that if prior knowledge in the form of fuzzy rules can be incorporated to develop a neural network in advance, then the initial performance of the network is improved and requires less training time.
Since the neural networks and fuzzy models are weighted superpo-
sitions of nonlinear functions, such as radial basis functions and fuzzy
PI.
**Institute of Information Science
Academia Sinica
Taipei, Taiwan
115,
China
basis functions, they have been utilized to implement on-line approx- imation of the numerical functions describing the model of the plant dynamics
.
More recently, neural nelworks with radial basis func- tions and fuzzy system in combination with adaptive techniques are used to learn approximate feedback linearizing control action by on- line tuning the parameters involved [lo], [Ill. This paper studies the output tracking control problem in interconnected afline nonlinear systems. As regards the output tracking problem of uncertain non- linear systems,there have been many designs of tracking controllers using the feedback linearization technique in nonlinear control the- ory [12]. To mention some among others, there are variable struc- ture controller [13], robust controller [14] and adaptive controller [15].Here, we present a neuro-fuzzy approach for synthesizing decoupling
control law from sets of input/output membership functions. An adaptive fuzzy controller and its network structure, which is com- posed of decentralized fuzzy systems with embedded two-stages rule ciedit assignntents rascaded with the interconnections compensat- ing associative memory network
,
is proposed to realize a kind of decoupling control action for composite affine nonlinear systems.In Section 2
,
the output tracking problem for composite affine nonlinear systems is formulated. In Section 3, we present the con- cepts of approximate reasoning fuzzy system embedded with two- stages rule credit assignment. In Section 4, the components of the fuzzy controller together with its analytical form are given. In Sec- tion 5, a deadzone adaptation algorithm for controller parameters is derived to ensure robustness to approximation errors. In Section 6 ,simulation of the inverted pendulum is performed to illustrate the effectiveness and robustness of the controller. Finally, conclusions are made in Section 7.
2
The Output Tracking
Problem
We begin our study by defining the class of plants under consider- ation, Consider a composite affine nonlinear system which is com- posed of n interconnected
SISO
afine nonlinear subsystems with each subsystem in a companion form:n
y y = f * ( z , t ) + .&(=)U, + v , ( = , t ) (1)
3 = 1
i = h ( z , r ) (2)
where yE E R, z
=
[ 2 1 , 2 2 , . . . , ~ ~ ] ~ , zz=
[yt,Yll...,y, (P-l)]T, = 1,.. .
,
n. z is a vector of appropriate dimension, f*, gr3 are bounded nonlinear functions of the state x, vI is unknown but bounded inter- connection.(1) can be rewritten compactly as
f ( = ,
t)+
G ( = b+
4 z , l ) y(P)=
(3) ~0-7803-4253-4/97/$10.00 0 1997 IEEE
-
237
-
where
<,,
denotes<,,
E the centroid of the s e t { u : B:(u)2
A : ( s ) ) (11) (using the local mean-of-maximum (LMOM) implication method [lB]), and U:, represents tlie credit assigned to R:,, for subsystemi, while t~&, i
#
k , is used to counteract the dynamic interactions between the subsystems i and k .4
The Tracking Controller with
Layered Network Structure
Combining the approximate reasoning engine described in Section 3 with layered structure, we construct a fuzzy controller that could on- line implement decoupling control law for composite nonlinear sys. terns (3). As shown in Fig.2, the proposed controller is an inteigra- tion of (a)decentralized FS-RCAs, (b)an interconnections compen- sating associative memory network for counteracting the unknown interconnections among the subsystems and (c)a nonsingularity su-
pervisor for monitoring the feasibility of cascading the components (a) and (b). The aim of this fuzzy system is to on-line compute an approximately decoupling control action to achieve nearly decoupled trajectory tracking for each subsystem.
FS-RCA
interconnections compensating
associative memory network
Figure
2:
Components of the proposed controller
The decentmlized FS-RCAs
In view of the defuzzification formula (lo), the defuzzification of the decentralized FS-RCAs can be defined as
u o ( t )
=
b - ' ( z , ~ ( w ) ) ( j ( z , ~ ( c a ) )+
r(e,t)) (12) whereThe Interconnectrons Compensatang Associative Memory Net- work
To compensate the unknown interconnections among the sub-
systems and disturbances acting on each subsystem to achieve decoupled tracking behavior, the interconnections compensat- ing associative meniory network is cascaded with decentralized FS-ItCAs. Basically, the interconnections compensating asso-
ciative meniory network recombines the output of the decen- tralized FS-RCAs, U O , into a new vector U , tlie control action, by the operator M defined as
'The Norisiirgularily Supervisor
Since the weight matrix W in (15) will likely be singular, the nonsingularity supervisor is used to monitor the feasibility of
cascading the decentralized fuzzy systems and the interconnec- tions compensating network. This is done via the function of nonsingularity supervisor by slightly perturbing
d
to anotlier nonsingular C during the whole control process.Using (U), (14), (15) and applying the Matrix Inversion Lemma
[lY] ( A
+
BCD)-'=
A-'-
A - ' B ( D A - ' B+
C - ' ) - ' D A - ' , the defuzzified output of tlie fuzzy controller resolves intowhere G = C
t
D. Tlie invertibility of where6
= C
+
D. The invertibility of G can be guaranteed by proper choices of controller parameters (see Section 5).The fuzzy control processing can be adapted to a parallel neural network structure where each node contains the knowlege of fuzzy membership functions and each connection represents the credit of a fuzzy rule. With the network structure, the fuzzy controller has a total of four layers:
Layer 1: Each node denotes the input e or a: to the fuzzy system.
Layer 2: Each node calculates the rule matching degree
9:
(s) =Layer 3: Each node in this layer obtains the singleton implica- tion fuzzy set and computes its location
%,,
by (11). Layer4:
This layer contains n nodes, which calculate the de- coupling control according to (18).Each layer corresponds to a sub-stage of the approximate reasoning fuzzy system with adjustable rule credit assignment shown in Fig. 1. This structure allows the input be fuzzified/defuzzified in a parallel way by simultaneously matching membership functions encoded in the nodes.
A: ( 8 ) .
5
Tracking Performance
In this section, we investigate the closed-loop system (Fig. 3). It is assumed that, given any uniform bounds c f , c ~ , there exist parameter vectors
e;,
. .
,e:
such that the network approxitnation errorssatisfymaxz f ( a ; , t ) -
)(;.,0'--'*)11
5 c f ,maxa:
I/
G ( Z )-
G ( z , ~ ( w ) * ) I l5
c9. (19)Figure
3: The closed-loop adaptive
fuzzy
e approuima-
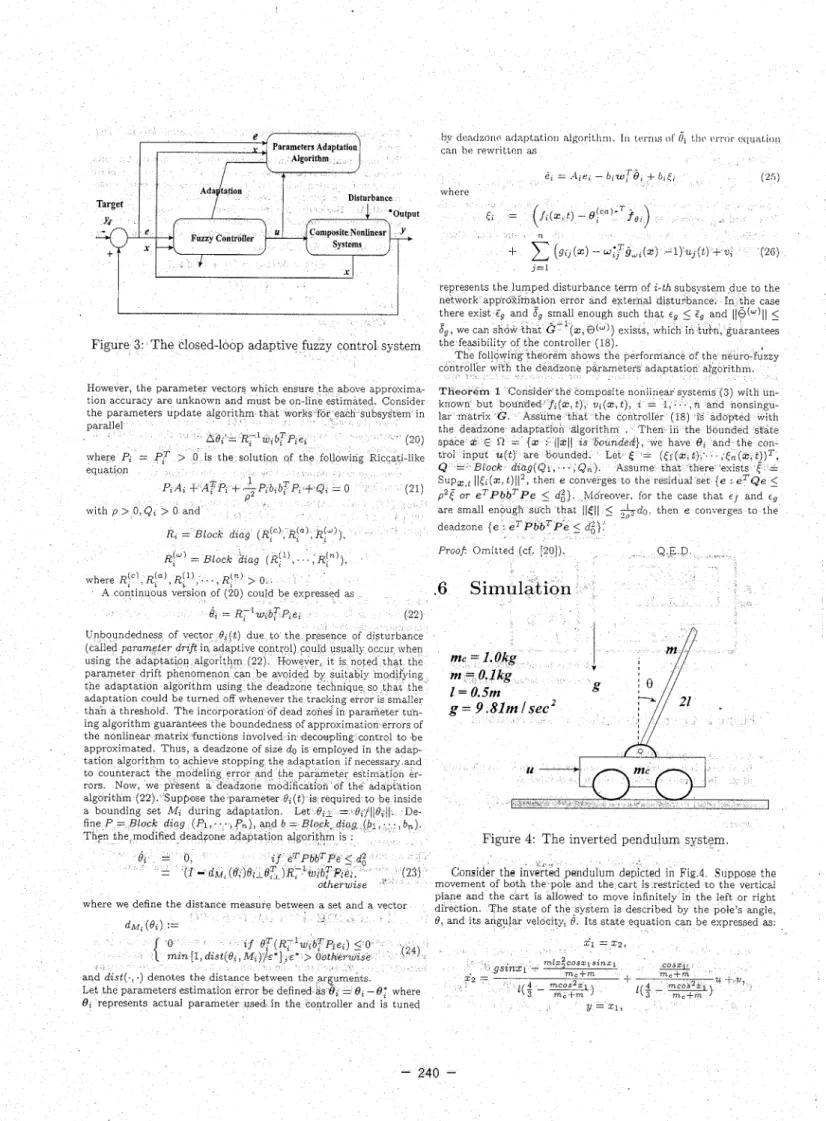
where z1 =
Q,
z2 = 0, g is the acceleration due to gravity, 7nc is the mass of the cart, m is the mass of the pole, 1 is the half-length of the pole, u is the applied force and D is the external disturbance.This system is unstable if the control u is set to be 0.
Simulations are performed for disturbance of size Iv(t)l
5
0.5.Parameters of the neuro-fuzzy controller are set as p
=
0.02, Q=
0.05,Mi
= {O :141
5
15, /aiR[5
6, IuJI5
2) and the PD gaina1
=
10, 0 2=
100. Initially,do
are chosen randomly i n the interval[ - U , 121, and a i o = ukO = 2, wJ - 1. Fig. 5 shows the membership O T
functions of 11
,
1 2 and u used i n simulation. Fig. 6 shows the simulation result. Simulations show that the neuro-fuzzy controller achieves quite satisfactory tracking performance.lOIzxz, R = Block d ~ ~ g ( 0 . 0 2 1 2 5 ~ 2 5 , O . o l I z 5 ~ ~ 5 , 1.0125~25]; e*
=
PS
U
Figure
5 : Membership functions for
&,z2and
U .N
rep-
resents negative,
P
positive,
Z E
approximately zero,
S
small,
M
medium,
B
big.
\7
Conclusion
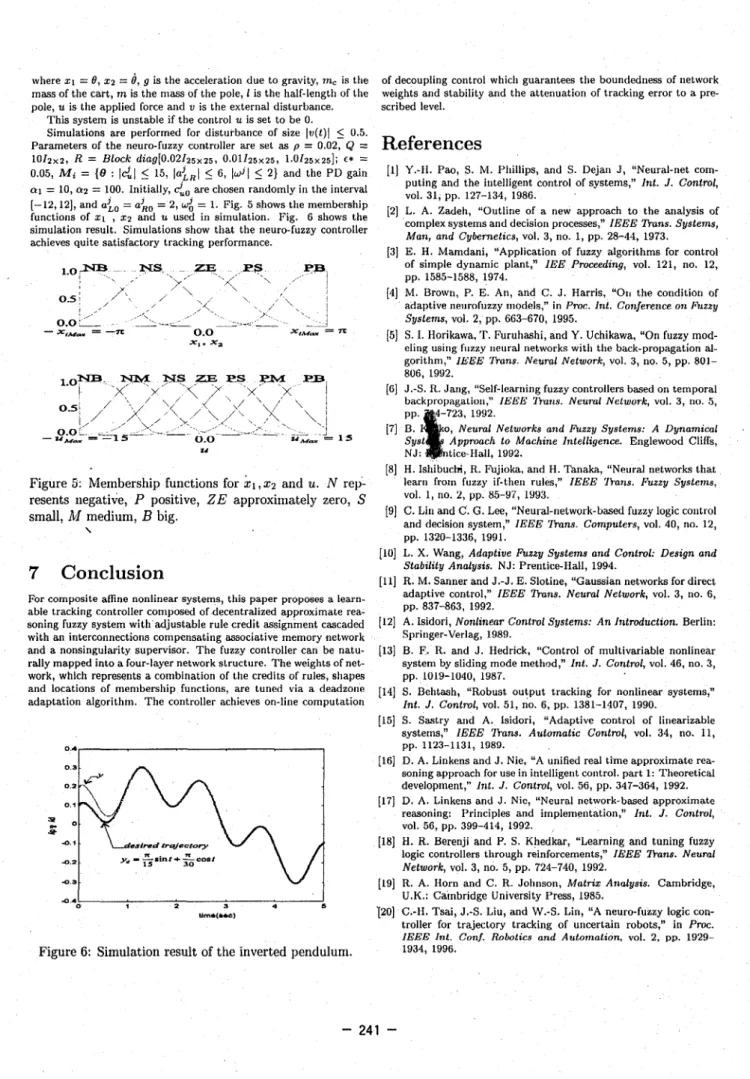
For composite affine nonlinear systems, this paper proposes a learn- able tracking controller composed of decentralized approximate rea- soning fuzzy system with adjustable rule credit assignment cascaded with an interconnections compensating associative memory network and a nonsingularity supervisor. The fuzzy controller can be natu- rally mapped into a four-layer network structure. The weights of net- work, which represents a combination of the credits of rules, shapes and locations of membership functions, are tuned via a deadzone adaptation algorithm. The controller achieves on-line computation
4 4
1 2 3 4 6
U*.(..=)
Figure 6: Simulation result
of
the inverted pendulum.
of decoupling control which guarantees the boundedness of network weights and stability and the attenuation of tracking error to a pre- scribed level.
References
[I] Y.-€1. P a q S. M. Phillips, and S. Dejan J , “Neural-net com- puting and the intelligent control of systems,” Int. J. Control,
[2] L. A. Zadeh, “Outline of a new approach to the analysis of complex systems and decision processes,” IEEE Zkuns. Systems, Man, and Cybernetrcs, vol. 3, no. 1, pp. 28-44, 1973.
[3] E. H. Mamdani, “Application of fuzzy algorithms for control
of simple dynamic plant,” IEE Proceedzng, vol. 121, no. 12,
[4] M. Brown, P. E. AII, and C. J. Harris, “On the condition of adaptive neurofnzzy models,” in Proc. Int. Conlerence on F u z y Systems, vol. 2, pp. 663-670, 1995.
[5] S. 1. Ilorikawa,
T.
Furuhashi, andY.
Uchikawa, “On fuzzy mod- eling using fuzzy neural networks with the back-propagation al- gorithm,” IBEE 7kans Neural Network, vol. 3, no. 5, pp. 801-806, 1992.
[GI J.-S. R. Jang, “Self-learning fuzzy controllers based on temporal backpropagation,” IEEE 1 1 ~ 7 ~ s . Neural Network, vol. 3, no. 5 ,
Networks and Fuzzy Systems: A Dynamrcal
to Machine Intelligence. Englewood Cliffs,
1992.
(81 H. Istiibuchi, R. Fujioka, and H. Tanaka, “Neural networks that learn from fuzzy if-then rules,’’ IEEE ‘Itn7is. Fuzzy Systems, 191 C. Lin and C. G . Lee, “Neuial-netwoik-based fuzzy logic control and decision system,” IEEE Trans. Computers, vol. 40, no. 12,
[IO] L. X. Wang, Adaptrue f i z z y Systems and Control: Design and
Stability Analysis. NJ: Prentice-Hall, 1994.
[ l l ] R. M. Sanner and J.-J. E. Slotine, “Gaussian networks for direct adaptive control,” IEEE %ns. Neural Network, vol. 3, no. 6,
[ 121 A. Isidori, Nonlinear Control Systems: An Introduction. Berlin: Springer-Verlag, 1989.
1131 B. F. R. and J . Hedrick, “Control of multivariable nonlinear system by sliding mode method,” Int. J. Control, vol. 46, no. 3, pp. 1019-1040, 1987.
[I41 S. Behtash, “Robust output tracking for nonlinear systems,”
Int. J . Control, vol. 51, no. 6, pp. 1381-1407, 1990.
[15] S. Sastry and A. Isidori, “Adaptive control of linearizable systems,” IEEE 7bans. Automatcc Co78tro1, vol. 34, no. 11, pp. 1123-1131, 1989.
[16] D. A. Linkens and J. Nie, “A unified real time approximate rea-
soning approach for use in intelligent control. part l: Theoretical development,” h i t . J. Control, vol. 56, pp. 347-364, 1992.
[17] D. A. Linkens and J . Nic, “Neural network-based approximate reasoning: Principles and implementation,” Int. J. COtitrol,
[le] €1. R. Berenji and P. S. Khedkar, “Learning and tuning fuzzy logic controllers through reinforcements,” IEEE rrclns. Neural Network, vol. 3, no. 5, pp. 724-740, 1992.
1191 R. A. Horn and C. R. Johnson, Matriz Analysis. Cambridge,
U.K.:
Cambridge University Press, 1985.‘[20] C.-H. Tsai, J . 4 . Liu, and W.-S. Lin, “A neuro-fuzzy logic con- troller for trajectory tracking of uncertain robots,” in Pruc.
IEEE I n l . Conf. Robotics and Automatron, vol. 2, pp. 1929- 1934, 1996. vol. 31, pp. 127-134, 1986. pp. 1585-1588, 1974. [71 vol. 1 , 110. 2, pp. 85-97, 1993. pp. 1320-1336, 1991. pp. 837-863, 1992. vol. 56, pp. 399-414, 1992.