國立交通大學
網路工程研究所
碩士論文
車載網路中透過 RSU 的規劃傳送多路徑影像串流
Roadside Unit Scheduling for Multi-path Video
Streaming in Vehicular Ad-hoc Networks
研 究 生:鄭元碩
指導教授:陳
健 教授
車載網路中透過 RSU 的規劃傳送多路徑影像串流
Roadside Unit Scheduling for Multi-path Video
Streaming in Vehicular Ad-hoc Networks
研 究 生:鄭元碩 Student:Yuan-Shuo Cheng
指導教授:陳 健 Advisor:Dr. Chien Chen
國 立 交 通 大 學
網 路 工 程 研 究 所
碩 士 論 文
A Thesis
Submitted to Institute of Network Engineering College of Computer Science
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Computer Science
July 2011
Hsinchu, Taiwan, Republic of China 中華民國一百年七月六日
車載網路中透過 RSU 的規劃傳送多路徑影像串流
研究生:鄭元碩 指導教授:陳 健 國 立 交 通 大 學 網 路 工 程 研 究 所中文摘要
車載網路是在近幾年來新興的議題,隨著科技的進步,車載網路上的應用也 越來越豐富,在車載網路下傳遞文字訊息已經變得不敷使用。影像相較於文字較 容易被人們所理解和接受,透過影像豐富的內容可以提供人們行車的安全和更便 利的生活。然而在車載網路下傳遞影像是一個嚴峻的挑戰。在本篇論文,我們提 出了一個在車載網路中提供影像串流的系統,並且導入使用者的路徑。根據之前 多路徑的相關研究,可以知道在車載網路下,透過多路徑的備份機制可以提高封 包成功傳遞率,然而透過實驗發現到影像串流透過多路徑傳遞,其傳輸頻道競爭 的情形會很嚴重,會降低影像的品質,故我們的系統透過路側單元的協助來降低 傳輸頻道競爭的情形。因此如何選取一組路側單元以提供多路徑的影像串流是本 篇論文主要探討的部分,我們將路側單元選取與排程問題轉化成覆蓋問題以求得 最佳解。並且我們設計一個系統和路由協定在車載網路下提供影像串流服務,影 像傳輸路由協定則是每當影像傳遞到路口時,再透過優先權來做下一個傳輸路徑 的選擇。根據實驗的結果,相較於單一路徑,透過路側單元協助的多路徑的影像 串流傳遞會有較高的影像觀賞品質,並且系統透過我們提出的覆蓋演算法和單純 用貪婪演算法來尋找規劃路側單元相比,我們提出的演算法會較容易找出一組完 整的路側單元集合,使得系統在提供影像串流服務時,在相同的路側單元數目下 可提供更多使用者的影像服務,讓本篇提出的影像系統在真實的車載網路下可以 更適用。 關鍵字: 車載網路、覆蓋問題、影像傳遞、多路徑路由、路側單元Roadside Unit Scheduling for Multi-path Video
Streaming in Vehicular Ad-hoc Networks
Student: Yuan-Shuo Cheng Advisor: Dr. Chien Chen
Institute of Network Engineering
National Chiao Tung University
Abstract
With the rapid development of wireless communication technology and the rapid increase in demand for traffic information in the car, a Vehicular Ad-Hoc Network (VANET) is an emerging network technique that will be deployed in the future. A VANET is a technology that equips moving cars with wireless communication capability to create a mobile ad-hoc network. To cope with the highly partitioned nature of a VANET, some static Roadside Units (RSUs) can be deployed to improve the data dissemination. With the spreads of content-rich web-based intelligent transport system applications, the simple text data dissemination in VANET has become insufficient. In contrast, video is easier to be comprehended by people than text data. Such as an accident video on the road provides instant traffic safety information to the drivers. However, how to disseminate a video over VANET is a challenge. In this paper, we propose a system to provide video streaming services along with car’s route on the roads. According to the previous studies backup mechanism through multiple paths routing can improve the packet delivery ratio. Nevertheless, our experiments showed that the video streaming via multi-path transmission leads to video quality degradation due to severe channel contention. Therefore, in this paper, we focus on the problem of selecting RSUs to provide multi-path video streaming services. We find that the RSU scheduling problem can be transformed to the well-known Set-Covering-Problem. Our RSU-Scheduling algorithm finds a set of RSUs which support video servers to provide high quality video streaming service. Based on our experimental results, RSU support video streaming via multi-path routing has higher video quality than single path routing. Furthermore, our RSU-Scheduling algorithm can support more video users with the same number of RSUs comparing with greedy method.
Index Terms-VANET, Set-Covering-Problem, Video Streaming, Multipath Routing, Roadside Units.
致謝
本篇論文的完成,要歸功於我的指導教授陳健博士,老師不厭其煩的容忍我 在做研究的路程中所犯的錯誤,當我遇到瓶頸時幫助我尋求突破的方向,讓我受 益良多,也因此學到如何從頭到尾以科學的精神面對一個難題,讓我得以順利完 成本篇論文,在此表達最誠摯的感謝。同時也感謝我的論文口試委員,交大的王 國禎教授、易志偉教授和中華電信的朱煜煌博士,他們從客觀的角度提出了許多 的寶貴意見,讓我的論文更加完整。 感謝我的學長陳盈羽、張哲維、陳坤定、孫冠孙和莊敬中細心教導,由於我 們的互相討論及在論文上的協助,使我的研究更為完整。另外要感謝我的同學王 柏翔和彭宣翰,由於大家平常在課業與研究上的勉勵和幫助,使得我的研究所生 涯更加充實且順利,並在我需要協助時總是不吝伸出援手,陪我度過煩躁不順遂 的日子。同時也要感謝實驗室的學弟,希望你們能夠把握在交大的日子,更加充 實自己。 特別感謝我的朋友、大學同學與女朋友,他們在精神上給我莫大的鼓勵,傾 聽聆聽我內心的聲音並給我許多建議,而不致迷失了自我,並且由於你們的支持, 我才能夠如此順利的完成碩士的學業,在此向你們致上最高的謝意。 最後,我要感謝家人對我的關懷和支持,他們含辛茹苦的栽培,使得我得以 無後顧之憂的專心於研究所課業與研究,我要向他們致上最高的感謝。Table of Content
中文摘要 ... ii
Abstract... iii
致謝 ... v
Table of Content ... vi
List of Figure ... vii
List of Table ... viii
第一章 簡介 ... 1 第二章 相關研究 ... 5 第一節 車載網路下的影像傳遞... 5 第二節 多重路徑研究... 6 第三節 路側單元協助的混和型車載網路... 6 第三章 路側單元多路徑影像服務系統 ... 8 第一節 研究動機... 8 第二節 系統架構... 12 第三節 路側單元規劃... 13 第一項 路側單元到路口的預測延遲... 17 第二項 路側單元規劃演算法流程圖... 18 第三項 路側單元規劃演算法... 19 第四節 路側單元的影像串流傳遞協定... 21 第一項 串流的範圍選取機制... 22 第二項 傳遞道路的選擇機制... 22 第三項 路口和路口之間的傳遞機制... 23 第四章 模擬結果 ... 24 第一節 單一路徑和多路徑的比較... 24 第二節 覆蓋演算法和貪婪演算法的路側單元選取... 26 第一項 影像服務的成功率... 26 第二項 規劃路側單元傳送多路徑影像模擬結果... 29 第五章 結論 ... 33 第六章 參考文獻 ... 34
List of Figure
Figure 1 System architecture ... 3
Figure 2 Multipath from one source ... 8
Figure 3 Simulation with different path from one source ... 10
Figure 4 Multipath from different sources ... 10
Figure 5 Simulation with different path from two sources ... 11
Figure 6 Distribution of channel contention with two sources ... 11
Figure 7 System architecture ... 12
Figure 8 System flow chart ... 13
Figure 9 RSU selection problem ... 14
Figure 10 Set Covering Problem... 14
Figure 11 Greedy algorithm for set covering problem ... 15
Figure 12 Example for set covering problem ... 15
Figure 13 Example for time confliction ... 16
Figure 14 Channel contention with different path selections ... 16
Figure 15 Different schemes for path prediction ... 18
Figure 16 RSU-Scheduling flow chart ... 18
Figure 17 RSU-Scheduling algorithm ... 19
Figure 18 Example for extending legal road combination... 20
Figure 19 Greedy set covering modify algorithm ... 20
Figure 20 Example for RSU selection problem by RSU-Scheduling ... 21
Figure 21 Stale neighbor table ... 23
Figure 22 PSNR for different path with sparse environment... 25
Figure 23 PSNR for different path with dense environment ... 26
Figure 24 Success ratio for different algorithm in 0.25 deadline... 27
Figure 25 Success ratio for different algorithm in 0.3 deadline... 28
Figure 26 Success ratio for different algorithm in 0.35 deadline... 28
Figure 27 Success ratio for different algorithm in 0.3 deadline... 29
Figure 28 PSNR with different RSUs set in sparse environment ... 30
Figure 29 PSNR with different RSUs set in dense environment ... 31
Figure 30 PSNR with different RSUs set in sparse environment ... 32
List of Table
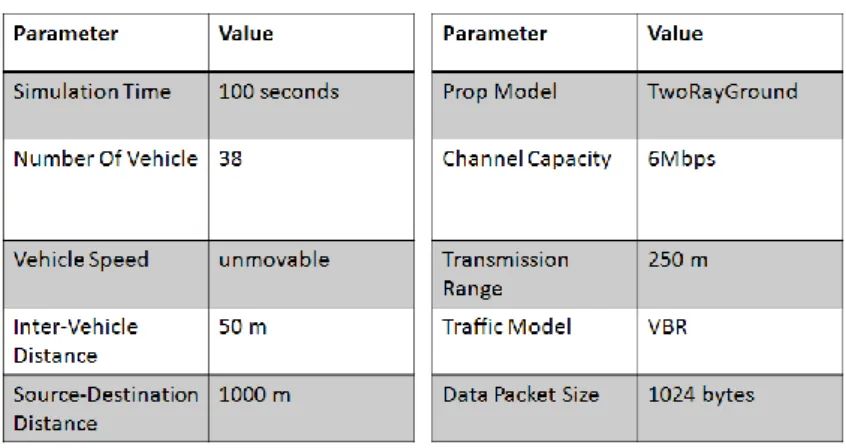
Table 1 Simulation parameter with unmovable vehicle ... 9 Table 2 Simulation parameter with single path V.S multipath ... 25 Table 3 Simulation parameter with different RSU selection algorithm .... 29
第一章 簡介
智慧型運輸系統(Intelligent Transportation System, ITS)是透過一些通信和資 訊等技術,整合人、車和道路的資訊,提供即時的訊息,進而提升運輸時的安全 和效率。而智慧型運輸系統的通訊技術,主要分成:車輛到基礎設施之間 (Ve-hicle-to-Infrastructure , V2I)、車輛到路側單元之間 (Vehicle-to-Roadside Units, V2R)、車輛到車輛之間 (Vehicle-to-Vehicle, V2V)三種型式。V2V 和 V2R 主要是 短距離傳輸,像是用 Wi-Fi 或者 DSRC(Dedicated Short Range Communications) [1][2][3]。而 V2I 主要是長距離傳輸到基礎設施網路,像利用 WiMAX、GSM (Global System for Mobile Communications)或是 3G。為了實現智慧型運輸系統更 多的應用服務的可能,近年來有很多文獻都在研究探討利用這三種通訊技術所建 構成的車載網路(Vehicular Ad-hoc Networks , VANET)。
車載網路是一群具有無線傳輸裝置的車子所形成的高度移動性的隨意網路 (Ad-hoc Networks),它可以跟鄰近的車子、路側單元(Roadside Units)或者無線基 地台作溝通,彼此傳遞、交換訊息。而透過車輛的移動來傳遞訊息可以傳送到其 他網路架構所傳遞不到的地方,並且其成本較低。至於它和移動式無線隨意網路 (Mobile Ad-hoc Networks, MANET)不同的地方在於,車輛擁有高度的移動性,使 得車載網路下的網路拓樸的變化情形很大,很難存在長時間穩定的路徑,故需要 更頻繁的去維持、更新路由表(routing table)或是鄰居表(neighbor table)等資訊。 並且車載網路的節點為車輛,車輛只行走在道路上,故其網路拓樸是隨著道路路 徑而變化,其分佈會受限在特定的區域上,而 MANET 的節點是隨機分佈而且可 以往任何方向移動,故其網路拓樸是隨機變化,沒有固定規則的。 隨著科技的進步,未來路上具備傳輸能力的車輛也越來越多,使得車載網路 下的應用也會越來越蓬勃發展。例如在道路安全駕駛方面,若是駕駛員可以知道 鄰近道路的意外事故,則可以事先提高警覺抑或是換走其他沒有發生事故的道路, 可以增加行車安全。而在商業或是娛樂的應用方面,如視訊會議、線上遊戲、社 群網路或是餐廳、遊樂場所的預約和廣告等,則可以使得車載網路使用者的生活 更加便利。 因為隨著應用和需求的增加,在網路中傳統一些靜態的文字訊息傳遞已經漸 漸無法滿足人們的需求,並且隨著頻寬的日益提高,聲音、影像等需求越來越受 重視。影像相較於文字較有豐富的內容,並且影像較容易且迅速被理解,在一些 緊急的情況下,影像可以在瞬間即判斷出發送者所傳遞的訊息,增加解讀率或減 少閱讀時間。文字必頇經過加工,透過人為的收集資料、擷取,並合成一個新的 有用的訊息再傳遞出去,其訊息的產生較易耗費時間,而若是透過影像來傳遞訊 息,其要傳遞的資訊可以透過影像豐富生動的內容直接傳遞給使用者,不頇經過
人為的干預,使得資訊的傳遞更立即。 在車載網路下傳送影像,是一個困難的新挑戰[4]。車載網路下,因為車輛 的移動速度很快,其車輛和車輛之間的連結,是很不穩定的,可能連結一下子就 會失效,故在傳統車載網路下,封包成功抵達率一直是研究的議題,很多文獻都 在探討如何增加封包成功抵達率。 影像是一個串流,並且影像需要傳輸的框架(frame)大小不是固定的,故每秒 傳輸的位元是變動的(Variable Bit Rate, VBR),造成封包遺失的分佈不均。影像會 在短時間內傳送大量的封包(bursty traffic),大大的增加傳輸頻道競爭(channel contention)的問題,造成封包大量遺失。而影像最重要的特性是它有播放截止時 間(deadline)的限制,此限制大大增加了在車載網路下傳送影像的困難度。傳統傳 遞文字的車載網路,若是沒有其他更好的選擇的車輛來幫忙傳遞封包時,此車輛 可以把封包放入暫存器內,封包隨著車輛一起行進,直到遇到傳遞選擇權比自身 更好的車輛出現時,再把封包傳遞給它(carry and forward)。而因為影像播放截止 時間的限制,使得在制定車載網路下傳遞影像的協定時,必頇不得允許封包的暫 存,因為若是封包在播放截止時間之後才送到,則此封包就沒有用處了,會被丟 棄。 大部分探討影像傳輸方面的研究主要還是應用在隨意網路、移動式隨意網路 [5][6]或是網狀網路(Mesh Network)[7]之下。在車載網路下探討影像傳輸方面的 研究,是在近年來才慢慢開始被人重視。如 V3[8]提出了一個傳遞影像的基礎架 構。而[9]主要是探討在高速公路下的影像傳輸,並比較 sender base 和 receiver base 的影像傳輸品質,在高速公路下的車載網路,因為車間相對距離變動不大, 並且在同一條道路上作傳輸,使得影像較容易傳輸。也有部分的文獻探討一些網 路編碼的方法來提高傳輸的影像品質[10][11],還有探討影像失真率的文獻 [12][13]等。 根據一些之前的研究,可以發現其在傳送影像時都沒有去考慮到影像是連續 性的問題。因為傳統上傳遞資料到接收者時,都會假設知道目的地接收者的位置。 因為接收者的車輛是會移動的,故隨著時間的堆進,接收者會慢慢遠離他的原始 位置,因此造成資料傳遞到不正確的位置而遺失,雖然之後可透過一些找尋接收 者位置的機制,或者接收者重新發出影像的需求等方法,再重新傳遞影像資料給 接收者,然而由於影像資料的影像撥放截止時間可能已經超過,而造成影像的中 斷,影響接收者觀賞影像的品質和興致。因此我們的研究希望可以加入車輛行走 路徑的考量,來幫助影像的傳遞。 根據[14],我們可以知道在車載網路下傳遞多路徑資料的封包成功傳遞率會 比傳遞單一路徑資料的封包成功傳遞率來得高,我們透過一些實驗來驗證透過多 路徑傳遞影像封包是否也會有相同的效果。而透過我們的實驗發現到,因為影像 是在短時間內會產生大量的封包,故其串流在自己的路徑節點的封包彼此就會有 傳輸頻道競爭的情形,造成封包的遺失,若是再透過多路徑的封包備份機制,則 傳輸頻道的競爭會更加的嚴重,使得封包成功傳遞率不增反減。故在設計我們的
系統時,希望在提供影像服務時,透過多路徑的備份機制,但是卻有較輕微的傳 輸頻道競爭,進而提高封包成功傳遞率。路側單元主要架設在路口或是路邊,提 供車輛與外界網路接取的介面,並且路側單元彼此之間是以有線網路連接,故可 以利用有線網路比無線網路傳輸快速、可靠之優點,減少資訊在無線網路環境傳 輸的機會,可以大幅降低封包遺失的狀況也可以快速的將封包傳送到目的地端 [15][16]。在設計我們的系統時,若是透過多個路側單元來提供多路徑影像服務, 則因為各個串流是從不同的路側單元產生的,可以減少傳輸頻道競爭的情形,使 得封包傳遞成功率上升,進而使得使用者會有較好的影片觀賞品質。 根據上面的一些想法,我們在本篇論文希望可以提出一個系統,根據各個使 用者未來的路徑,利用路側單元使得可以在車載網路下提供高品質的影像服務。 同時為了增加在車載網路下影像封包傳遞的成功率,我們提出的系統加入多路徑 的機制,使得有多條的傳送路徑來傳遞影像封包給接收者,進而增加影像封包成 功傳遞的機會,使得使用者有較好的影像觀賞品質。 Figure 1 是一個我們提出的系統示意圖,圖中綠色的使用者希望在他的行車 旅程當中看一部球賽,他會在旅程一開始時,根據電子地圖導航的未來路徑(綠 色箭頭)和影像的相關資訊,透果路側單元發送影像需求給我們的系統,系統伺 服器在收到使用者感興趣的影像和其未來路徑後,會去把使用者未來行經路徑上 的路口(I1, I2, I3)當作暫時的服務點,透過一些延遲預測機制,即可預測哪些路側 單元可以在一個門檻值時間限制下將影像送達各個路口。我們的系統會透過上述 的這些訊息,規劃出路側單元集合,使得使用者在不同的時間,在行經路徑上的 各個道路(r1, r2)時,都會有數個路側單元傳遞影像串流到鄰近路口來服務他。圖 中為一個在使用者旅程中各個道路(r1, r2)下都有兩個路側單元服務的例子。
Figure 1 System architecture
那我們的系統透過路側單元的協助來幫助提供影像的服務,則會衍生出一些 額外的問題,像是路側單元的選取機制和如何從路側單元傳送影像到使用者的協
定等,都是本篇論文研究的議題。在路側單元選取問題方面,如上圖所示,使用 者未來行經的各個路口,會被當作暫時的服務點,即代表若是路側單元可以在一 定延遲時間下傳遞給路口的服務點,即表示此路側單元可以在特定的時間下服務 到使用者。路口服務點可以被多個的路側單元所服務,那如何找出最少數目的路 側單元集合即為我們想要求的解,此路側單元選取問題即可以轉換成覆蓋問題 (Set Covering Problem, SCP),只是路側單元的選取問題會加入一些額外的條件, 例如各個路口的服務需求時間可能是會有衝突的,所以我們必頇對路側單元作排 程規劃,我們的系統為了透過多路徑的封包備份機制來提高封包成功傳遞率,我 們必頇減少傳輸頻道競爭的情形發故我們加入時間上的限制和減少傳輸頻道競 爭的條件到我們演算法的決策裡面,故我們針對路側單元選取問題,提出了一個 演算法來解決這個有附加條件的覆蓋問題。針對從路側單元傳送影像給使用者, 我們提出一個以路口為基礎的路由協定來傳遞影像,使得封包的延遲可以儘量在 一個影像播放截止時間下抵達使用者。 本篇論文接下來的部分包括:第二章會介紹在車載網路下傳送影像的相關研 究;第三章將會提出我們的系統和路側單元選取機制的覆蓋演算法,並且會提出 一個在車載網路下傳遞影像的協定;第四章中,會針對我們系統的路側單元選取 演算法,並根據選取出來的結果去做網路模擬;最後第五章則是對於此篇論文的 結論及未來展望。
第二章 相關研究
第一節 車載網路下的影像傳遞
在車載網路下的影像傳遞其在近年來蓬勃的發展,其中 V3[8]提出了一個架 構,提供在 V2V 網路下的即時影像服務,包含影像擷取驅動(trigger message)和 影像回傳(video data)方法。但是在實驗模擬方面,並沒有用即時的影像去做傳輸, 僅僅只探討封包傳遞延遲的時間,故無法得知此架構對於影像服務品質的確切影 響。 而[9]則是針對車載網路下的高速公路來傳遞影像,高速公路會有較高的車 流密度,並且車輛之間的連結較不容易變化,使得車輛之間的連結亦不容易斷裂 和失效,進而讓高速公路下的影像傳遞相較於一般得車載網路影像傳遞,會是較 容易傳遞影像的。[9]在這個較容易傳輸影像的環境下,去比較透過不同的影像 傳輸方法傳輸的影像品質,傳輸方法主要分成兩種:基於傳輸者傳輸(sender base) 和基於接收者傳輸(receiver base)。透過實驗數據顯示,使用基於接收端傳輸的影 像品質會較使用基於傳送者傳輸來的好,原因在於使用基於傳輸者傳輸,其若是 鄰居表(neighbor table)是不正確或是老舊的,則在傳輸時會造成封包的遺失,封 包傳遞不到所指定的下一個傳遞者,造成封包成功傳遞率下降。而基於接收端傳 輸不用指定下一個傳遞者,而是透過廣播把封包傳遞出去,各個收到此封包的車 輛會再透過一個延遲等待時間(back-off time)決定出哪一個車輛才是下一個傳遞 者,故其不用維護鄰居表,有較少的控制封包需要傳送,並且不會有鄰居表不正 確的情形出現,故和基於傳輸者傳輸相比,會有較高的封包傳遞成功率和較好的 影像觀賞品質。[17]則是提出一個 RRSU(Roadside Service Units)的特殊基礎設施針對車載網 路下的高速公路來傳遞影像。RRSU 是一個區域性、獨立性的節點,它和傳統的 路側單元不一樣的地方在於,RRSU 彼此之間是不用連通地,也不用連接到網路 上,透過 RRSU 的幫忙可以彌補 V2V 網路下傳遞封包的傳遞斷層。若是傳遞的 封包對於有較好傳遞優先權的路徑其無車輛幫忙傳遞時,封包將會先被傳遞到路 口 RRSU 暫存,直到有較好傳遞權的路徑其有車輛抵達幫忙傳遞時,再傳遞給 在此路徑上的車輛,可以減少因無路徑而使得封包遺失的情形。但是其中 RRSU 暫存器大小的設置,是一個兩難問題,若是設置的太小,則封包容易被丟棄,造 成封包遺失率上升,而若是設置的太大,則雖然封包傳遞率會上升,可是其封包
傳遞延遲亦會大大上升,會有較大的機會使得收到的封包其封包傳遞延遲時間會 超過影像的撥放截止時間的限制,造成影像的品質下降。
第二節 多重路徑研究
[5]則是透過改進 AOMDV[18][19]來傳遞即時影像。它加入了鏈結關係 (Link-stability)取代掉原本 AOMDV 得最短路徑選取。傳統 AOMDV 在傳送封包 時,他會去在多條路徑中,根據要往下傳遞的次數(hop count)來做排序,Hop Count 數最少的就是主要的傳遞路徑(primary Path),其他的皆為備份路徑(backup path)。 而因為在最少的傳遞數目下,其可能會因為節點的些微移動而造成連結的斷裂, 故[5]提出 Link-stability 來增加路徑的穩定度。Link-stability 是單純透過 RREQ 和 RREP 的收送,取得 Received Signal Strength(RSS),來判斷此鏈結的好壞和此鏈 結還可以維持多久得資訊,並記錄到路由表內,使得傳遞者在尋找多個路徑的優 先權時,則會根據紀錄,先去比較 Link-stability,若 Link-stability 相同才會再去 比較 hop count。但是在[5]中的實驗並沒有真正去傳送影像,故並不知多路徑對 影像傳遞的影響好壞和訊號干擾的強弱。 [14]則在車載網路下來探討 Node-disjoint 多路徑的干擾影響,提出就算是 Node-disjoint 得多路徑,若其串流傳遞於同一條道路上或是串流傳遞路徑彼此之 間的距離相距太近,其都會造成訊號干擾的問題,降低封包成功傳遞率。透過實 驗,[14]比較不同的多路徑資料傳送方式:Without-redundancy 和 With-redundancy, 其中 With-redundancy 透過多條相同串流的封包備份傳送,使得其封包遺失率都 會遠比 Without-redundancy 來的低。但是這篇文獻並沒有定義出各個路徑是怎麼 選取的,只是單純的探討干擾的特性。
第三節 路側單元協助的混和型車載網路
在車載網路下,其路側單元(Roadside Units)相較於車輛所攜帶的傳輸設備 (Onboard Units)擁有較高的可靠性,並且可以透過路側單元間的彼此溝通,迅速 的做訊息的交換。[15]透過路側單元把道路做切割,使得在道路上的車輛,可以 被分成不同的群組,和傳統分群的概念不一樣的是,傳統分群的群體領導者必頇 隨時隨地去維護這個群體,透過一段間隔時間的不斷廣播,使得領導人可以知道 這個群體的成員有哪些人。而[15]則是因為透過路側單元的協助,當車輛抵達到 新的路口時才會做群體的轉換,使得群體的維護變的簡單,並且只需要較少的控 制封包,而且群體的轉換可以迅速被其他路側單元所知道。根據這個架構,當在 路上的傳輸者想要傳送封包給目的地節點時,會先發出路徑尋找要求,利用廣播給周遭的車輛,若是目的地在同一個群組下時,則目的地會直接做回覆。但若是 目的地不在同一個群組下,則路側單元收到此要求後,會去詢問其他路側單元, 各個路側單元會去判斷目的地是否在其所切割的群體下,若是則再回傳給傳輸者。 而傳輸者根據所收到的回覆訊息,即可找到路徑到目的地,故可透過路側單元的 協助,使得封包的傳遞,可以更快更遠更穩定。 [16]透過[15]所提出的架構,加入 Link-disjoint 的多路徑機制,在高速公路的 環境下提出路由協定,來解決車輛連結易斷的問題。但因為是在高速公路的情形 下,故其群組的切割較簡單,其車流密度對於影像的傳遞也較簡單,並且在此篇 論文中,並沒有討論到多條路徑是否會有訊號干擾的問題。
第三章 路側單元多路
徑影像服務系統
第一節 研究動機
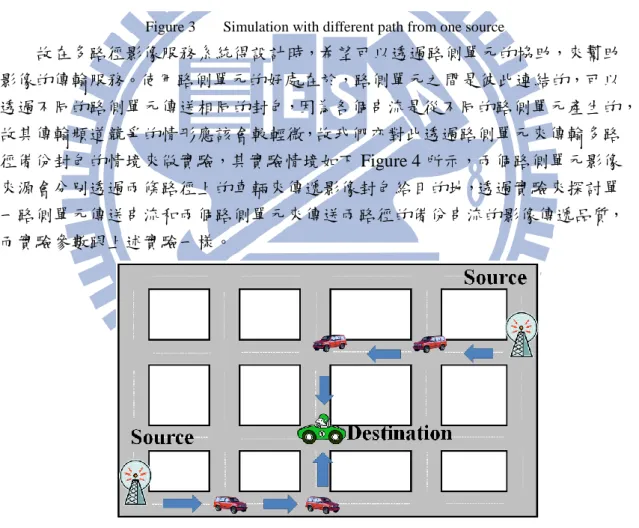
根據[14],我們可以知道在車載網路下傳遞多路徑的封包成功傳遞率會比傳 遞單一路徑的封包成功傳遞率來得高,故我們想探討若是透過多路徑來傳遞影像 是否會有相同的效果,我們作了下列實驗來觀察透過多路徑來傳遞影像的品質。 實驗情境如 Figure 2 所示,影像來源會透過圖中兩條路徑上的車輛來做影像傳遞 給目的地,其目的是希望透過兩條路徑的傳送來增加影像封包成功傳遞率。實驗 設置如 Table 1 所示,在這個實驗下,我們單純想探討多路徑影像傳輸其傳輸頻 道競爭對影像品質的影響,故在影像來源到目的地之間已經確保是有路徑的,在 影像來源和目的地之間的節點都固定不動,使得在整個傳輸過程中,單純只會有 頻道競爭的影響使得封包被丟棄。串流傳遞的總距離為 1000 公尺,實驗傳遞的 影像為 foreman,其每秒的框架數為 15 張,影像品質客觀指標(PSNR)的上限為 36.16。影像品質客觀指標的上限是指原始影像單純只透過影像編碼和解碼所造 成的影像失真,而不考慮網路傳遞的影響。Table 1 Simulation parameter with unmovable vehicle 如 Figure 3 所示,可以知道 Figure 2 情境下的相同來源多路徑影像傳輸,並 不會增加影像的觀賞品質。其主要的原因在於,影像是在短時間內產生大量封包 的串流,本身串流的封包對其傳遞頻道的競爭本來就很嚴重,就單一路徑的情形 來看,本身串流封包傳輸頻道競爭的情形就會使得封包的遺失,若再加上另一條 串流的傳輸頻道競爭,則封包遺失的情形勢必會更嚴重。IEEE 802.11 使用 RTS/CTS 協議(Request To Send/Clear To Send),相當於一種握手協議,來避免隱 藏終端(Hidden Stations)的問題。傳送端在傳遞封包前會先發送 RTS 給接收端, 以確保此封包在傳遞時不會受到其他訊號的干擾,若是接收端是空閒的,則接收 端會回傳 CTS 給傳送端,使得傳送端可以在無受干擾的情況下,傳送封包給接 收端。若是接收端一直處於忙碌的狀態下,則當傳送端的 RTS 超過一個傳遞的 上限時,此要被傳遞的封包就會被丟棄,此即為因為傳輸頻道競爭而使得封包遺 失的情形。圖中的串流從影像來源到第一跳之間的傳遞即為整條串流傳遞的瓶頸, 因為兩條串流都在競爭傳輸頻道的使用權,故會造成大量封包遺失。而同樣兩條 串流在目的地交會的封包遺失量比在來源端的封包遺失量較少,這是因為在先前 路徑的封包遺失使得要傳遞到目的地的封包大量變少,傳輸頻道競爭的情形變得 較輕微。
Figure 3 Simulation with different path from one source 故在多路徑影像服務系統得設計時,希望可以透過路側單元的協助,來幫助 影像的傳輸服務。使用路側單元的好處在於,路側單元之間是彼此連結的,可以 透過不同的路側單元傳送相同的封包,因為各個串流是從不同的路側單元產生的, 故其傳輸頻道競爭的情形應該會較輕微,故我們亦對此透過路側單元來傳輸多路 徑備份封包的情境來做實驗,其實驗情境如下 Figure 4 所示,兩個路側單元影像 來源會分別透過兩條路徑上的車輛來傳遞影像封包給目的地,透過實驗來探討單 一路側單元傳送串流和兩個路側單元來傳送兩路徑的備份串流的影像傳遞品質, 而實驗參數跟上述實驗一樣。
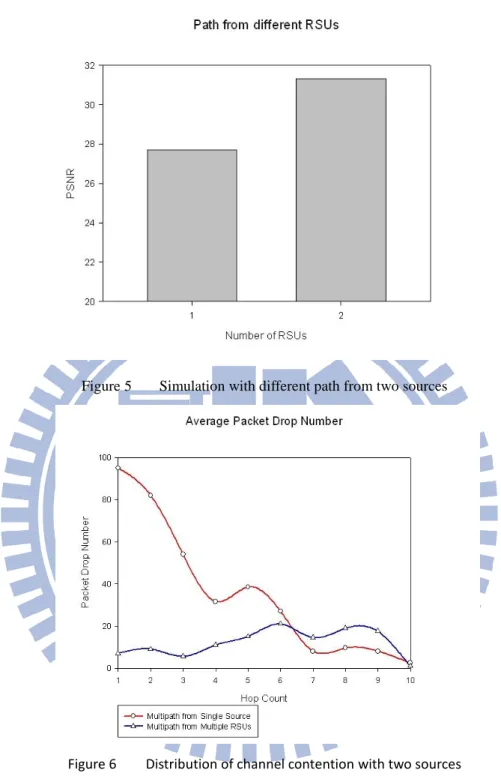
Figure 5 Simulation with different path from two sources
Figure 6 Distribution of channel contention with two sources
根據 Figure 5 的實驗結果,可以知道在 Figure 4 的情境下,多了一條備份串 流從不同的路側單元傳遞給使用者,其影像客觀品質是有上升的。Figure 6 為兩 個不同的情境其在不同 hop 之間的封包遺失率,其中紅色的線為 Figure 2 的情境, 而藍色的線為 Figure 4 的情境。根據 Figure 6 可以知道紅色的情境,其在來源和 前兩跳因為傳輸頻道競爭而丟棄封包的情形占了全部丟棄封包的 59.4%,傳輸頻 道競爭情形嚴重,那原本想透過多路徑來改善封包遺失的初衷,反而會因增加的 傳輸頻道競爭,使得封包成功傳遞率不升反降,進而降低影像客觀品質。而藍色 線的情境的總封包遺失率和紅色的相比下降了 24.7%,其可以知道增加的串流並 不會大幅增加其傳輸頻道競爭的情形,故其增加的備份封包可以使得封包傳遞成
功率上升,進而增加影像觀賞客觀品質。其中兩條串流在目的地會合處的封包遺 失情形並不嚴重,因為先前各自串流自身的封包遺失,而使得要被傳遞的封包大 量減少,使得在接收端的傳輸頻道競爭得情形較為輕微。 故根據上述的兩個實驗顯示,我們的系統加入路側單元的多路徑協助,可以 提高影像的觀賞品質。而加入路側單元的協助後,我們的研究主要可以分成兩部 分,一個是路側單元的選取機制,因為在道路上可以提供服務的路側單元是有限 的,而需要系統服務的使用者可能會不只一個,故必頇透過一些決策機制來選取 合適的路側單元來服務使用者。另一部分則是被選出來的路側單元需要根據一些 路由協定來傳遞影像串流給使用者,那因為影像的傳遞其限制較大,故一些傳統 傳送資料的路由協定可能不敷使用,故需為我們的系統提供一個適合的傳遞影像 的路由協定。
第二節 系統架構
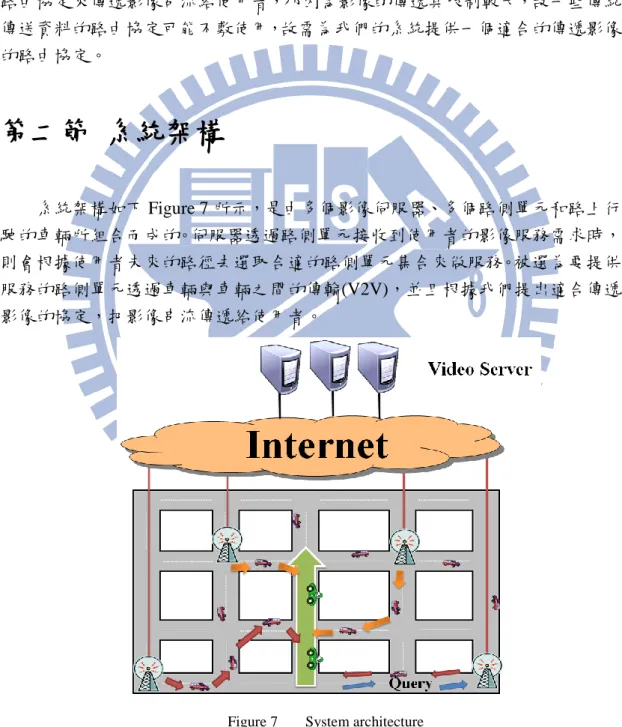
系統架構如下 Figure 7 所示,是由多個影像伺服器、多個路側單元和路上行 駛的車輛所組合而成的。伺服器透過路側單元接收到使用者的影像服務需求時, 則會根據使用者未來的路徑去選取合適的路側單元集合來做服務。被選為要提供 服務的路側單元透過車輛與車輛之間的傳輸(V2V),並且根據我們提出適合傳遞 影像的協定,把影像串流傳遞給使用者。Figure 7 System architecture
如上圖所示,綠色車輛的使用者會在旅程一開始根據其未來路徑(綠色箭頭) 發送影像要求(Query)給我們提出的影像服務系統,透過路側單元把收取到的影 像要求傳遞給我們的影像伺服器,則伺服器會根據其所感興趣的影像和其未來路
徑,規劃出路側單元集合來服務,使得圖中綠色車輛在其未來的路徑道路上,會 有多個路側單元來服務在各段道路上。 而系統執行的流程如下 Figure 8 所示。系統在收到影像要求時,會先去選取 影像伺服器來提供影像服務,並且系統會維護所有的路側單元工作時間表,根據 這個維護的紀錄,再透過單一或是多位使用者的未來路徑,來計算出各個使用者 在其旅程中各個時間點所需合適的路側單元來服務。選去到的路側單元集合會再 依據我們提出的適用於影像傳遞的路由協定來傳遞影像封包給使用者。
Figure 8 System flow chart
在下面一節會先介紹整個系統的核心:路側單元選取機制,之後在更下一節 會提出一個適合我們系統來傳遞影像的路由協定。
第三節 路側單元規劃
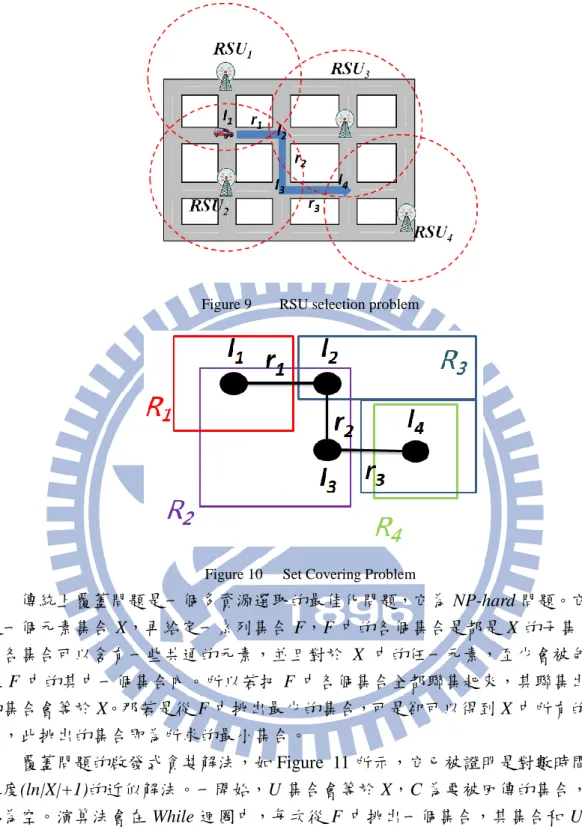
根據使用者未來路徑和平均車速,我們就可以透過一些決策,求得合適的路 側單元集合。決策問題的情境如下 Figure 9 所示,I1~I4為使用者未來會經過的路 口,其中使用者根據其未來路徑,會在不同時間點抵達不同的路口,而 t1~t4 為 各個路口所需服務的時間區間,紅色虛線為路側單元可以負責的範圍,路口有被 路側單元負責的範圍所包含到的,就表示該路口可以被此路側單元所負責。如圖 所示,各個路口可以被多個路側單元所服務,那我們系統在做合適的路側單元選 取時,那為了降低資源的使用,我們系統在選取時會希望可以選出最少的路側單 元集合來對使用者提供服務,我們路側單元的選取問題就可以轉換成傳統上的覆 蓋問題(Set Covering Problem, SCP),如 Figure 10,其中{R2, R4}, {R2, R3}, {R1, R2,Figure 9 RSU selection problem
Figure 10 Set Covering Problem
傳統上覆蓋問題是一個多資源選取的最佳化問題,它為 NP-hard 問題。它給 定一個元素集合 X,再給定一系列集合 F,F 中的各個集合是都是 X 的子集,F 中各集合可以含有一些共通的元素,並且對於 X 中的任一元素,至少會被包含 在 F 中的其中一個集合內。所以若把 F 中各個集合全都聯集起來,其聯集出來 的集合會等於 X。那若是從 F 中挑出最少的集合,可是卻可以得到 X 中所有的元 素,此挑出的集合即為所求的最小集合。 覆蓋問題的啟發式貪婪解法,如 Figure 11 所示,它已被證明是對數時間複 雜度(ln|X|+1)的近似解法。一開始,U 集合會等於 X,C 為要被回傳的集合,初 始為空。演算法會在 While 迴圈中,每次從 F 中挑出一個集合,其集合和 U 集 合有最大交集,然後更新 U 集合,再把此集合加入 C 集合中。直到 U 集合為空, 則代表所有要被覆蓋的元素都被覆蓋完畢了,則此 C 集合即為所求。
Figure 11 Greedy algorithm for set covering problem
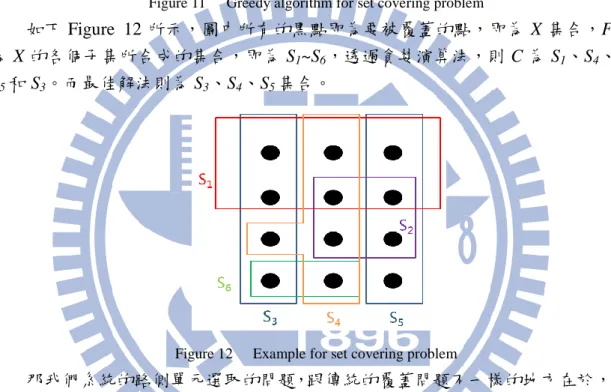
如下 Figure 12 所示,圖中所有的黑點即為要被覆蓋的點,即為 X 集合,F
為 X 的各個子集所合成的集合,即為 S1~S6,透過貪婪演算法,則 C 為 S1、S4、
S5和 S3。而最佳解法則為 S3、S4、S5集合。
Figure 12 Example for set covering problem
那我們系統的路側單元選取的問題,跟傳統的覆蓋問題不一樣的地方在於, 使用者未來路徑的路口節點,都包含一段服務需求時間區間。路口會有服務需求 時間區間所代表的意義是,被覆蓋的路口並不是一直都需要服務的,它只是在特 定的時間下,他才需要服務。又因為各個路口的服務需求時間區間,可能會有重 疊的情形產生,故我們必頇加入一些條件到演算法裡,使得選取到的路側單元, 不會有時間上的衝突。如 Figure 13 所示,路側單元可以對路口編號 1、2、3、4、 5 所負責,但因為各個路口所需服務的時間會有衝突,例如路口 2 和路口 4 在需 要服務的時間上有重疊,故此路側單元不能同時服務路口 2 和路口 4。
Figure 13 Example for time confliction 又因為要透過路側單元協助多條路徑傳遞串流到使用者未來的各個道路上, 例如 K 個路側單元各自傳送一條串流(總共 K 條串流)來到使用者未來所在道路的 兩個路口上,越多串流在同一條路上作傳遞,其傳輸頻道競爭的情形會增加,封 包越容易遺失[14],故希望透過一些機制,使得 K 條串流可以均勻分配到兩個路 口,使得因為傳輸頻道競爭而被丟棄的封包遺失可以降低。如 Figure 14,其 K 等於 2,(a)的兩條串流會在使用者所在的路上的左邊路口會合,然後再往使用者 所在的道路去做傳遞,故串流集中在同一條路上,傳輸頻道競爭的情形會較常發 生;(b)的兩條串流分別抵達使用者所在的道路的兩個相異路口後,再傳遞給使 用者,可以減少傳輸頻道競爭的影響。
故根據我們對傳統覆蓋問題加入些許的條件限制,形成我們的路側單元規劃 問題。我們提出一個覆蓋問題貪婪解法的改良,來解決有時間區間限制下的路側 單元集合選擇的問題,並且會有較少的傳輸頻道競爭的情形。下面幾項會依序介 紹如何判斷路側單元是否可以在撥放截止時間下傳遞封包給所需負責的路口。之 後會再介紹我們系統提出的演算法和分析。
第一項 路側單元到路口的預測延遲
在做路側單元集合的選取前,我們必頇先知道各個路側單元可以服務的路口 集合有哪些,即為路側單元路口集合(RSU intersection set),所以透過一些機制, 我們可以求得路側單元到路口的預測延遲,進而判斷此路口是否可以被路側單元 所服務,最後即可求得各個路側單元的路側單元路口集合。 因為影像播放截止時間的限制,使得在車載網路下傳遞影響封包時,不允許 車輛攜帶封包行走(carry),不然將會大大增加傳遞的延遲時間,封包若在撥放截 止時間之後才送到,則此封包將會毫無用處而遭到丟棄。故我們在預測路側單元 到路口的路徑時,必頇盡量找連通性佳的路徑,而非是距離最近的路徑,減少沒 有車子幫忙傳遞的情形。我們根據電子地圖上的道路歷史資料,用道路密度的倒 數來當作路側單元到路口作Dijkstra’s algorithm 的權重,求出的路徑即為此路側 單元到其所服務路口的預測路徑,並且是連通性較高的路徑。 透過求得的路徑,即可求出路側單元到路口的預測距離(D),之後透過無線 傳輸距離(TR)和平均一個傳輸距離的傳送時間(t),即可以求出路側單元到路口的 預測延遲(expected service delay),如公式(1)。有了路側單元到路口的預測延遲, 即可去判斷此路側單元是否可以對此路口在一個延遲時間門檻值之下作服務。即 去判斷是否小於一門檻值,若是的話,即代表此路側單元到某一路口的封包傳遞 預測延遲,會小於一個播放截止時間,表示此路側單元可以服務此路口。𝑒𝑥𝑝𝑒𝑐𝑡𝑒𝑑 𝑠𝑒𝑟𝑣𝑖𝑐𝑒 𝑑𝑒𝑙𝑎𝑦 =
𝐷
𝑇𝑅
∗ 𝑡
(1)
如 Figure 15 所示,路側單元到使用者所在的路口的路徑,可以分成依照地 理位置所求的最短路徑和依照歷史資料密度所求的含有較高連通性的路徑,又因 為用無線傳輸所需耗費的時間遠小於車子攜帶封包到目的地的時間,故雖然較高 連通性的路徑其整體的距離較長,但是其預測延遲時間卻比依照地理位置所求的 最短路徑的延遲時間較短。Figure 15 Different schemes for path prediction
第二項
路側單元規劃演算法流程圖
如下 Figure 16 所示,系統會根據所需服務的 K 條路徑來決定演算法的決策, K 代表在使用者未來路徑上的每一段路都各需要 K 個路側單元來服務。那為了減 少多個路側單元對應到的路口會分布不均的情形使得傳輸頻道競爭的情形增加, 如 Figure 14(a)所示,演算法在 K 大於 1 的路側單元選取時,會把 K 個路側單元 的選擇分割成數次的兩個路側單元來尋找(Find_Two),例如 K 為 4,則會分成 2 次的 Find_Two,因為透過一次尋找兩個路側單元來服務此路段時,我們可以把 此路段的相鄰路口當作要被覆蓋的點,使得找到的路側單元可以對應到相異的兩 個路口,使其分布均勻,減少傳輸頻道競爭。當 K 的值為 1 或是只剩下 1 時, 會去執行一個路設單元服務尋找(Find_One),例如 K 為 3,則會分成 1 次 Find_Two 加上 1 次 Find_One 的路側單元尋找。當做完 Find_One 流程後或是 K 為 0,則代 表此演算法執行完成,求得的路側單元集合即為所求。 K <= 1 Find_One Finish Find_Two START Yes No K = K-2 K == 1 Yes No第三項 路側單元規劃演算法
根據上述的流程,其演算法可以如下 Figure 17 所示,其中輸入的參數為:R 為所有使用者的未來路徑上的道路集合、I 為所有使用者的未來路徑上的路口集 合、K 為對於任一個使用者需要幾個路側單元來服務在其各段道路上以及 LC(legal combination)是各個路側單元的路側單元路口集合其所有合法的組合集 合。Figure 17 RSU-Scheduling algorithm
當很多路口都在一個路側單元可以服務的範圍之內,那路側單元可以根據各 個路口所需的服務時間來做配對,其所有的可能合法配對,即為合法組合集合。
例如說若是其中一個路側單元 Ri,其可以服務的路口為 I1、I2、I3,其可以服務
的組合可以有(I1)、(I2)、(I3)、(I1, I2)、(I1, I3)、(I2, I3)和(I1, I2, I3)共 7 種。以(I1, I2)
這個配對來看,若是 I1頇被服務的時間區間為[t1~t2],而 I2頇被服務的時間區間 為[t1~t3],則因為時間有重覆到,會發生衝突。因為路側單元 Ri不能在時間點 t1 時,同時服務路口 I1、I2 ,即代表(I1, I2)是不合法的配對組合。 流程圖中的 Find_One,指的是在使用者的旅程中其各段道路都需一個路側 單元來服務,如 RSU-Scheduling 的第 3、4、5 行和第 16、17、18 行。Find_One 透過路的觀點來做覆蓋問題的演算法,把所有使用者的未來路徑的道路集合當作 要被覆蓋的節點,而要覆蓋的集合即為所有路側單元的路側單元道路合法集合生 成的集合,則 Find_One 求得的結果即為對於所有的道路都去尋找無時間衝突的
路側單元來提供影像串流服務。路側單元的路側單元道路合法集合是透過 LC 來
擴增的,例如 Figure 18 所示,若是有一個路側單元可以服務的集合為{I2},則可
以擴展成可以服務道路的集合{r1、r2},因為 I2和 r1、r2相鄰。
Figure 18 Example for extending legal road combination
而架構圖中的 Find_Two 流程,指的是在使用者的旅程中其各段道路都需兩 個路側單元來服務,如 RSU-Scheduling 的第 9、10、11 行。Find_Two 是以路口 的觀點來做覆蓋問題的演算法,把所有使用者未來的路徑的路口集合當作要被覆 蓋的節點,而要覆蓋的集合即為所有路側單元的路側單元路口集合的合法組合生 成的集合,則求得的結果為對於所有的路口都去尋找無時間衝突的路側單元來提 供影像串流服務,即可以在使用者路徑上的各個道路都找到兩個路側單元來服務 此路段的相異路口。 在演算法中所呼叫到的 GREEDY_SET_COVER_MODIFY 函式,如下 Figure 19 所示,其 X 為要被覆蓋的集合,可以為路口或是道路的集合,而 F 為各個路 側單元所能負責的集合而生成的集合,其中各個路側單元所能負責的集合是針對 路口或是道路對於各個合法組合的集合所生成的集合。
Figure 19 Greedy set covering modify algorithm
如 Algorithm 3 所示,我們不僅希望選出來的集合可以是有最大交集的,並 且在路側單元可以服務的集合有相同最大交集數目時,再依照選定的路側單元和 它可服務的路口之間的距離作加總,找出其值是最小的。根據演算法選出來的路 側單元會有最大的合法服務的路口,並且此路側單元和合法服務的路口其距離加 總是最小,使得延遲時間是最短的。 例如 Figure 20 是我們路側單元選取問題的情境,I1~I4為使用者的未來規畫 路徑,而 R1~R5為路上的路側單元。以找 2 條路徑為例(K=2),圖中 I1~I4為所有 頇被覆蓋的節點,而需去覆蓋的集合是由所有路側單元可以服務的合法路口組合
集合所形成的集合,例如可以表示成{LC1, LC2, LC3, LC4, LC5},又其中 LCi代表 為路側單元 Ri可以服務的合法路口組合(i 為 1~5)。例如圖中路側單元 R2可以服 務的路口為 I1、I2和 I3,故 R2可能可以服務的所有組合為{{I1}, {I2}, {I3}, {I1,I2}, {I1,I3}, {I2,I3}},但是其中{I1, I2}, {I2, I3}會有時間上的衝突,即代表為不合法的 服務組合,故必頇替除掉才可以生成可以服務的合法組合。其所有路側單元的合 法組合可以表示如下: LC1 {{I1}, {I3}, {I1, I3}} LC2 {{I1}, {I2}, {I3}, {I1, I3}} LC3 {{I1}, {I2}} LC4 {{I2}, {I3}, {I4}, {I2, I4}} LC5 {{I3}, {I4}} 則 RSU-Scheduling 執行結果會依序選擇 R2, R4路側單元。
Figure 20 Example for RSU selection problem by RSU-Scheduling
第四節 路側單元的影像串流傳遞協定
在車載網路下傳送影像的高封包遺失率會影響使用者觀看的品質,故我們的 系統會根據前一章所求得的路側單元集合,並搭配多路徑傳遞來提升封包成功傳 遞率,進而增進影像品質。影像撥放截止時間的限制使得影像封包傳輸延遲的要 求較傳統上傳遞資料封包來得嚴格,車載網路下傳遞資料封包時,若決定要傳遞 的道路上無車輛幫忙作傳遞時,則封包會透過 carry and forward 的機制來傳遞封 包,但是此機制對於影像傳遞卻是不適合的,因會大大增加傳遞延遲時間,故在 路徑的選取時,希望可以是透過基於路口路由來判斷傳遞的道路方向。 我們提出了一個可以符合多路徑的影像傳遞協定,各個串流不經過事先的路 徑規劃,而是透過基於路口再作方向的決策,減少無車輛幫助傳遞的情形。各個 多路徑串流會在各自特定圈選的範圍內做傳遞方向的選擇,透過相鄰道路的優先 權來決定要傳遞的方向,若是優先權較高的道路,當下沒有車輛可以傳遞封包時,
則去找較低優先權的道路。
第一項 串流的範圍選取機制
我們在制定協定時,希望是基於所處路口再決定之後傳遞的道路,使得走到 不連通的道路的機率減少。我們需要為數條串流圈選數個特定的範圍,使得串流 封包在特定的範圍內根據路口道路選取機制來傳遞[20]。在一開始的初始串流封 包傳遞範圍是根據傳送端的路側單元和需求服務的路口所圈出來的矩形,之後的 串流封包傳遞範圍會隨著封包抵達到新的路口重新和需求服務路口作圈選,使其 串流封包可以傳遞的範圍越來越小,封包也越來越接近目的地。第二項
傳遞道路的選擇機制
根據上述,其串流可以限定在特定範圍內隨意地傳遞到目的地路口,為了使 其封包丟棄的情形下降,我們在串流封包抵達路口時,會去計算各個鄰近道路的 優先權,然後封包會依序根據優先權去檢查是否有車輛在道路上可以幫忙傳遞, 有的話即代表此鄰近道路即為選定的道路,否則會再去尋找優先權較低的鄰近道 路,查詢是否有車輛可以傳遞。透過路口再作道路的選取可以減少選到的鄰近道 路其是不連通的機率,避免無車輛幫助傳遞,使得封包被丟棄,抑或是封包傳遞 截止時間超過影像撥放截止時間。 在對鄰近路口作優先權順序時,我們提出一個簡單的公式來幫各個鄰近路口 做評分。如下列公式(2)所示。i 代表的是影像串流目前所在的要決策的路口、j 代表其此路口的臨近候選路口、Sij代表由路口 i 和路口 j 所圍成的候選道路其優 先權分數、α 和 β 是一個平衡比例,其相加的值為 1、而 Dij是由路口 i 和路口 j 所圍成的候選道路的密度、Davg所代表的是所有道路的密度平均、Vi,j 代表的是 路口 i 到路口 j 的向量以及 Vi,d代表的是當前決策路口到目的地路口的向量。 公式(1)中的 Dij/Davg代表的是此段候選的道路,其道路密度和平均的道路密 度的比例,密度越大代表此道路連通的機率越大,則整個道路評分值也會越大。 而公式中的 cos 函數的值越大,代表候選道路向量和當前決策路口和目的地路口 的向量夾角較小,故其選定的候選道路其方向離目的地路口越相近[21]。𝑆
𝑖,𝑗= 𝛼 × 𝑚𝑖𝑛 (
𝐷
𝑖,𝑗𝐷
𝑎𝑣𝑔, 1) + 𝛽 × 𝑐𝑜𝑠(𝑉
𝑖,𝑗, 𝑉
𝑖,𝑑)
(2)第三項 路口和路口之間的傳遞機制
各個車輛都會在相鄰一段時間間隔下,去向其他人廣播它的自身訊息 (beacon message),例如自身車輛身份識別、當前車輛速度、當前經緯度和時間 戳記(timestamp)等,我們可以透過這些訊息,如鄰居表,來尋找下一位傳遞者。 車輛在發送廣播訊息時,可能因為廣播訊息的遺失,則此鄰居表就會有老舊、 不正確的問題,若是使用不正確的資訊,則在選擇下一位傳遞者時就會造成錯誤, 例如候選傳遞車輛已經不存在要傳遞封包車輛的傳輸距離內了,則此傳遞封包車 輛若傳遞給此錯誤車輛,會造成傳遞得失敗。 如下 Figure 21 所示,紅色的車要往 F 的方向傳遞封包,若是依照舊有的紀 錄資訊,其網路拓樸如(a)所示,則它會選擇車子 A 來做傳遞,但在當下時間點 t2,其網路拓樸應如圖(b)所示,則紅色車輛是傳遞不到封包給車輛 A 的,所以傳 遞會產生錯誤。Figure 21 Stale neighbor table (a)Topology with history(b)Topology with reality
故在路口和路口之間傳遞封包時,傳送封包節點的車輛會在決定傳遞車輛時 加入鄰居車輛位置預測機制,透過鄰居表裡的封包傳送時間、當下時間和車輛的 速度,即可透過歷史的訊息預測出當下鄰居車輛所在的位置,使得判斷下一位傳 遞者的正確性上升,增加封包成功傳遞率,進而增進影像觀賞品質。
第四章 模擬結果
在本篇論文中,我們提出了一個在車載網路下提供影像服務的系統,並且透 過多路徑的機制和路側單元的協助來幫忙傳遞影像封包,目的是希望可以透過較 多的串流來傳遞原始影像,進而透過封包多路徑備份的概念,來減少封包遺失率, 進而增加影像的品質。
而 MPEG[22]是採用分層編碼,可以分成 3 種框架壓縮模式:I、P 和 B。I 框架在解碼時不需參考其他框架的資料,可以單獨地進行解碼。I 框架是一框架 群組的第一張,隨後在框架群組裡的 P 框架與 B 框架都會參考到它,故 I 框架 在傳送時需被更妥善的保護,因為若是框架群組的 I 框架遺失,則就算是群組中 的其他 PB 框架都傳遞到目的地,則此框架群組依然無法被還原成影像。而 B 框 架在解碼時,會使用到前面較早被播放的 I 框架或 P 框架,由於參考之前的 I 框架或 P 框架並且以動態補償方式預測編碼。B 框架在解碼時,會使用到前面 及後面兩個方向的 I 框架或 P 框架,參考前後框架做動態補償預測編碼,本身 不再做為其他預測編碼用。 透過不同的路徑資料傳輸,使得可以對不同層級的框架來做加強。例如一條 路徑做正常的影像串流傳送,而另一條路徑只對於最重要的 I 框架來做傳送,則 對於接收端整個影像串流的 I 框架有加強的作用。因為若是在接收端,其 P 和 B 框架都有收到,可是 I 框架沒有收到,則此 P 框架和 B 框架依然無法還原為原始 的傳輸影像。故評估影像串流傳遞時,並不是看封包成功傳遞率,而是看影像品 質客觀指標(Peak to signal noise ratio, PSNR)。PSNR 會去比較原始影像和經過編 碼和網路傳輸過後的影像的相似度,兩個影像越相似,其值會越大。 本篇論文中我們使用 NS2(ns-2.34)[23]來測試實驗模擬我們提出的演算法和 多路徑影像傳遞協定,並且會探討多路徑和單一路徑其不同的資料型態串流,對 使用者所觀看影片的品質的影響。車流移動產生器我們使用 Vanet2004[24],產 生不同密度的車輛,隨機的散佈在地圖上。
第一節 單一路徑和多路徑的比較
我們在 1000*1000 的範圍下,依照不同的車輛密度 200 和 250,來比較不同 得路徑資料流對接收端的傳輸過的影像的 PSNR 的影響。傳送的影像為 foreman, 其 PSNR 得上限為 36.158124。在這個實驗中,我們只討論單一路徑和透過兩條 路徑來傳送影像串流的情形。圖 33 中 S 代表為單一路徑,2-way、Single+ I frame則代表是備份的概念,其中 Single+ I frame 是表示對於 I 框架做加強補足,而 2-way 則代表對所有框架都做加強。模擬參數如 Table 2 所示。
Table 2 Simulation parameter with single path V.S multipath
如 Figure 22 所示,在較稀疏的車流環境下,使用單一路徑來傳送影像的 PSNR 會非常不好,因在較低的封包成功傳遞率,若是框架群組中的 I 框架無法 傳遞到,則就算是同框架群組的 PB 框架封包有傳遞到,此框架群組依然會無法 被解碼,造成影像畫面遺失。有用備份概念的多路徑,如 2-way、Single+ I frame, 其 PSNR 得表現都較單一路徑好,因為透過備份的多路徑串流,原本單一路徑遺 失的封包會有機會透過其他路徑被還原回來。在稀疏的車流環境下,會有較低的 封包成功傳遞率,故 2-way 對所有的框架都做補足,其 PSNR 值會比 Single+ I frame 來得好。
Figure 22 PSNR for different path with sparse environment
值會比在車流較稀疏的車流密度來得好,並且備份的概念比單一路徑都來得要好。 其中因為大部分得串流封包都可以找到路徑到達目的地,故 2-way 和 Single+ I
frame 會差不多。
Figure 23 PSNR for different path with dense environment
第二節 覆蓋演算法和貪婪演算法的路側單元選
取
在這一節,我們會比較在先前章節所提及,我們藉由覆蓋問題所提出得覆蓋 演算法和單純使用貪婪解法。其中貪婪演算法會依序對於各個使用者所需經過的 路口,去尋找最近並且沒有時間衝突的路側單元來提供服務。我們會去比較在有 限路側單元數目下,其各個演算法的路側單元集合找尋成功率,之後再依照選取 出來得路側單元集合來做網路的模擬,進而比較不同的路側單元集合提供的影像 服務品質。第一項
影像服務的成功率
在這一節,我們在 1000*2000 的範圍下,根據不同的路側單元數目,隨機生 成 100 次的路側單元分佈,比較在不同的影像撥放截止時間門檻值和不同數量的 使用者的情形下,並且對於使用者路徑上的每一段路,都去尋找兩個路側單元來 服務使用者(K=2),其演算法可以找到一組完整路側單元集合的成功比例。在此 實驗中,各個使用者其各自的未來路徑是不變的,並且各個使用者的旅程起始時 間是相同的,只有路側單元得分佈會改變,而實驗結果是根據不同數目的路側單元,在 100 次的隨機分佈中,比較演算法可以找到一組完整的路側單元集合的次 數比例。實驗結果的成功比例越高,代表演算法在其有限數目下的路側單元是較 容易找到一組完整的路側單元,使得系統可以為更多的使用者提供影像服務。 如 Figure 24 所示,隨著路側單元數量的增加,其我們提出的覆蓋演算法和 貪婪演算法的執行成功比例都會上升,又覆蓋演算法得上升幅度較快,故可以知 道,覆蓋演算法在相同數目的路側單元情形下,根據不同路側單元的分佈,其系 統可以較穩定的提供影像服務。若是演算法的執行比例為 1,即代表演算法在 100 次的路側單元分佈中,可以找到 100 次的完整路側單元集合,如路側單元為 10 的情形。若是找不到一組完整的路側單元集合,即代表使用者在其未來路徑上, 找不到一定數量的無時間衝突路側單元來提供影像服務,使得系統提供的影像品 質較差或是無法服務。
Figure 24 Success ratio for different algorithm in 0.25 deadline
那根據 Figure 24 和 Figure 25、Figure 26,可以知道隨著撥放截止時間的上 升,使得路側單元可以服務得路口範圍變得更廣,兩個演算法都變成只需要較少 路側單元即可以到達較高的成功比例。並且如圖所示,覆蓋演算法的成功比例都 會比貪婪演算法的成功比例來的好。
Figure 25 Success ratio for different algorithm in 0.3 deadline
Figure 26 Success ratio for different algorithm in 0.35 deadline
Figure 27 所示,隨著較多的使用者加入,其所需服務的路口也會越來越多, 更容易會有路口沒有無時間衝突的路側單元來服務,使得兩個演算法的成功比例 都會下降。透過數據可以知道覆蓋演算法的成功比例依然會比貪婪演算法的成功 比例來得好,並且我們可以知道,覆蓋演算法和貪婪演算法相比,覆蓋演算法在 相同數目的路側單元下,可以提供更多使用者的影像串流服務。
Figure 27 Success ratio for different algorithm in 0.3 deadline
第二項 規劃路側單元傳送多路徑影像模擬結果
我 們 根 據 1000*2000 的 範 圍 , 透 過 先 前 章 節 所 提 出 的 覆 蓋 演 算 法 (RSU-Scheduling)和貪婪演算法(RSU-Greedy)求得的結果,來透過 NS2 來做網路 模擬。傳送的影像是 highway,其 PSNR 得上限為 38.019014,每秒得框架數為 30 張。透過不同的使用者數量,不同的車流密度,來比較此兩種演算法對網路 傳輸影像的影響,參數如 Table 3 所示,其中路由協定的 α 和 β 都是 0.5。Table 3 Simulation parameter with different RSU selection algorithm
覆蓋演算法求得的路側單元集合中,因為是根據使用者的順序去做路側單元 的選取,尋找的順序越高,其求出的路側單元集合也越完整,並且平均路側單元 到各個路口的距離也會較近;反之則較易找不到無時間衝突的路側單元來負責, 容易無完整的路側單元來服務,並且平均路側單元到路口的距離較長。 在車流密度 300 台車下,是相對較稀疏的車流密度環境。在 Figure 28 中, 系統中各個使用者所需的串流路徑為 2(K=2)。在貪婪演算法求得的路側單元集
合中,使用者 1 會有平均較短距離的路側單元集合來服務,使用者 2 的部分路口 會無路側單元所服務,在使用者 2 的旅程中,其中有一部分旅程是只有單一路徑 來做服務的(K=1)。如 Figure 28 所示,因為使用者 1 透過貪婪演算法求出的路側 單元集合有較短的平均距離,距離和封包遺失率成正比,使得影像更有機會被還 原成原來的原始影像,故使用者 1 透過貪婪演算法所求的路側單元集合,其影像 服務的 PSNR 會較覆蓋演算法好。而圖中使用者 2 的部分,因為使用者在貪婪演 算法求得的結果,會有部分服務是單一路徑傳遞的,封包成功抵達率會較低,故 PSNR 值會稍微比覆蓋演算法來得差。
Figure 28 PSNR with different RSUs set in sparse environment
Figure 29,跟上圖所用的設置是一樣的,只是車間密度相對較密集。使用者 1 依然是貪婪演算法的 PSNR 值較好一點。但是在使用者 2 時,其因為有一小段 路是單一路徑串流傳輸,故其覆蓋演算法的 PSNR 會較貪婪演算法來的好。
Figure 29 PSNR with different RSUs set in dense environment 在接下來的實驗,我們是使用三個使用者要求我們提出的系統作服務,透過 更多的使用者使用我們提出的系統,來比較多個使用者在我們系統的可行性。如 Figure 30 所示,我們在車流相對較稀疏的車流密度來比較透過貪婪演算法和覆 蓋演算法所求出的路側單元集合。其中貪婪演算法在使用者 3 時會有部分使用者 的路口其無法找到無時間衝突的路側單元做服務。 圖中使用者 1 的貪婪演算法的 PSNR 會較覆蓋演算法來的好一點。而使用者 2 方面和使用者 3 方面,則是覆蓋演算法的 PSNR 值較好。因為覆蓋演算法,是 由整個路口的觀點來看,所以最大的路口集合交集,並不會坐落在特定的使用者 路口上,所以各個使用者之間的 PSNR 值,主要是根據其道路是否有路徑,和網 路拓樸有關,跟演算法找出的結果沒相關的關係。貪婪演算法是根據各個使用者 的路口,依序去找最近且無時間衝突的路側單元,故隨著使用者的順序下降,其 使用者的影像觀賞品質會和和下降。
Figure 30 PSNR with different RSUs set in sparse environment
Figure 31 是在有較高車流密度環境下,所模擬出來的結果,其趨勢和上圖 相同。和上圖相比,其因為較容易有路徑可以傳遞,其系統中不同使用者的 PSNR 值都有上升。又因為貪婪演算法在使用者 3 找不到完整的路側單元集合,故其
PSNR 會較差。
Figure 31 PSNR with different RSUs set in dense environment
由上面的實驗可以歸納出,因為我們提出的覆蓋演算法,其所需的路側單元 數較少,故被保留下來的無服務路側單元,可以為更多使用者所服務。又覆蓋演 算法所選出得路側單元集合,和使用者的優先順序無關,只會和網路拓樸有關係, 並且透過多路徑的封包傳遞,使得在車載網路下傳遞影像的封包成功傳遞率會上 升。故透過多路徑備份傳遞的方式,使得使用者在對串流做解碼時,會得到較高 品質的影像。
第五章 結論
在本文,我們提出了一個在車載網路下提供影像服務的系統,並且透過多路 徑和路側單元的幫助,使得使用者在觀賞時有較高的影像品質。從一開始的實驗 可以得知,我們經由路側單元的協助來讓相異來源多路徑串流造成的傳輸頻道競 爭遠低於傳統的單一來源多路徑串流,使得有路側單元協助的系統可以提供較高 品質的影像。後續的實驗結果也顯示了透過路側單元協助的多路徑串流傳輸的 PSNR 值會比單一路徑來的好。經由我們提出的系統,在車載網路和影像傳遞的 雙重挑戰下,透過相異來源多路徑串流來提高封包傳遞成功率,並且保持不錯的 影像觀賞品質。在路側單元選取機制方面,我們提出的覆蓋演算法和單純透過貪 婪演算法相比,覆蓋演算法在相同的路側單元數目下可以服務更多使用者,讓我 們提出的系統更可以適用於實際的車載網路中。我們也提出了一個適用於車載網 路下傳遞影像的路由協定,傳遞的封包會根據路由協定,在抵達路口時再決定要 傳遞的路徑,可以減少封包因為無下一位傳遞者得幫忙,而使得封包隨著車輛行 進,造成封包的傳遞延遲時間超過影像撥放截止時間得限制。並且在傳遞封包時, 路由協定透過預測的機制,使得封包的傳遞可以根據較準確的鄰居資訊來做判斷, 減少傳遞的失敗機率。然而使用者在根據其未來路徑行駛時,可能會因為塞車、 意外事故或紅綠燈等一些因素,使得使用者會偏離我們所預測的位置,造成封包 傳遞延遲得上升,進而讓我們系統提供的影像服務品質下降,抑或是使得系統無 法正常的服務。故在未來的工作方面,我們可以針對這一個議題進行探討,使得 使用者在其速度變化量很大的情形下,依然不會影響到我們系統提供的影像品 質。第六章 參考文獻
[1] A. Int, “Standard Specification for Telecommunications and Information Exchange 1Between Roadside and Vehicle Systems-5GHz Band Dedicated Short Range Communications (DSRC) Medium Access Control (MAC) and Physical Layer (PHY) Specifications,” in Proceedings of ASTM, E2213-03, 2003.
[2] Q. Xu, T. Mark, J. Ko, and R. Sengupta, “Vehicle-to-vehicle Safety Messaging in DSRC ,” in Proceedings of the ACM Workshop on Vehicular Ad Hoc Networks, October 2004, pp. 19–28.
[3] J.Yin, T. ElBatt, G. Yeung,B.Ryu, S. Habermas, H. Krishnan, and T. Talty, “Performance Evaluation of Safety Applications over DSRC Vehicular Ad Hoc Networks,” in Proceedings of the ACM Workshop on Vehicular Ad Hoc Networks, October 2004.
[4] F. Lawal, J. Huang and O. Yang, ”Performance Tradeoff Study of Streaming Video among Vehicle,” in Proceedings of Vehicular Technology Conference Fall, 2010.
[5] Q. Lu, L. Du, Z. Zuo and X. Xiao, ”Improved Multi-path AODV Protocols for Real-time Video Transport over Mobile Ad Hoc Networks,” in Proceedings of
IEEE Pacific-Asia Workshop on Computational Intelligence and Industrial Application, December 2008.
[6] Lindeberg, M., Kristiansen, S., Plagemann, T., Goebel, V, “Challenges and Techniques for Video Streaming over Mobile Ad Hoc Networks”, in Proceedings
of Multimedia Systems 17, pp. 51–82, 2011.
[7] Y. Zhu, W. Zeng, H. Liu, Y. Guo and S. Mathur, “Supporting Video Streaming Services in Infrastructure Wireless Mesh Networks: Architecture and Protocols,”
in Proceedings of the IEEE International Conference on Communications, May
2008, pp. 1850–1855.
[8] M. Guo, M. H. Ammar and E. W. Zegura, “V3: A Vehicle-to-Vehicle Live Video Streaming Architecture,” in Proceedings of Elsevier Pervasive and Mobile
Computing, pp. 404-424, 2005.
[9] F. Xie, K.A. Hua, W. Wang and Y.H. Ho, “Performance Study of Live Video Streaming over Highway Vehicular Ad Hoc Networks,” in Proceedings of IEEE