室內無線定位方法之開發與驗證
61
0
0
全文
(2) 室內無線定位方法之開發與驗證. A Novel Geolocation Algorithm for Indoor Environments 研 究 生:蔡彥名. Student : Yan-Ming Tsai. 指導教授:唐震寰. Advisor : Dr. Jenn-Hwan Tarng. 國 立 交 通 大 學 電 信 工 程 學 系 碩 士 班 碩 士 論 文 A Thesis Submitted to Department of Communication Engineering College of Electrical and Computer Engineering National Chiao Tung University in Partial Fulfillment of the Requirements for the Degree of Master of Science in Communication Engineering July 2004 Hsinchu, Taiwan, Republic of China 中 華 民 國 九 十 三 年 七 月.
(3) 室內無線定位方法之開發與驗證 研究生:蔡彥名. 指導教授:唐震寰 博士. 國立交通大學 電信工程學系碩士班. 摘要. 本論文開發具創新性之室內訊號強度定位方法,該方法利用連續 取樣信號強度資訊並結合有效的空間取樣平均法以降低定位的誤 差,同時也開發幾何對應法以避開繁雜的無線定位計算可評估有效定 位範圍,該定位方法並於頻譜分析儀系統之室內實測結果驗證,得知 可以有 67%機率的定位誤差落在 4.67 公尺以內。此外,為了解該定 位方法應用於實際系統之有效性,於是將該方法應用於室內 WLAN 系統中,於實測驗證,可以有 67%機率的定位誤差在 4.9 公尺以內。 最後我們分析傳播衰減因子、幾何對應法及有效取樣半徑對定位誤差 的影響,得知傳播衰減因子對本定位方法之預估誤差影響最大,幾何 對應法對定位誤差的衝擊最小。有效取樣半徑選取越大時定位誤差則 i.
(4) 越小,但當該半徑之對應圓可涵蓋所有取樣點之預估位置時,定位誤 差將趨於不變動狀態。. ii.
(5) A Novel Geolocation Algorithm for Indoor Environments Student : Yan-Ming Tsai. Advisor: Dr. Jenn-Hwan Tarng. Department of Communication Engineering National Chiao Tung University. Abstract. In the thesis, we develop a novel geolocation algorithm for indoor environments. This algorithm continuously samples signal strengths and combine effect space sampling method in order to decrease position error. At the same time, we develop geometric mapping method to avoid complex calculation and to appraise effect position range. The geolocation algorithm is verified by measurement data of spectrum analyzer system. Experiment result shows that 67% position errors were below 4.67 meters. Furthermore, we apply this algorithm in indoor WLAN system and verify its effectiveness by practical measurements. The practical measurements show that 67% position errors were below 4.9 meters. Finally, we analyze propagation decay factor, geometric mapping, and effect sample radius. We get propagation decay factor is the most influence of position error and geometric mapping method is the lowest influence of position error. Besides, when the effect sample radius is increasing, the position error is decreasing. If this radius covers all prediction location, the position error is invariable. iii.
(6) 誌謝 首先獻上最誠摯的感謝指導教授唐震寰博士,由於他耐心的教導 與正確觀念的指引,並且在研究領域裡給予作者重要的啟示,使作者 能夠順利地完成碩士論文。除此之外,作者要感謝波散射與傳播實驗 室的伙伴們:沉鳴君、蔡明哲、張桂福,並感謝博士班饒瑞榮學長、 張維儒學長在量測與研究上鼎力相助,還有學弟蔡孟勳、鍾和穆、鄭 舜升、施宜興的實驗幫助量測,使得作者的碩士論文得以順利完成。 最後,更感謝我的父母、哥哥及姊姊在精神上給予我莫大的支持 與鼓勵,讓我能全心追求我的目標,順利完成學業,在此僅以此篇論 文獻給他們。. 彥名 于 國立交通大學 2004.7. iv.
(7) 目錄. 第一章 緒論……………………………………………………………1 1.1 簡介……………………………………………………………...1 1.2 動機………………………………………………………….…..1 1.3 背景………………………………………………………….…..2 1.4 目的………………………………………………………….…..4 1.5 論文架構……………………………………………………...…4 第二章 無線定位原理…………………………………………………6 2.1. TOA 定位法……………………………………………………6. 2.2. TDOA 定位法……………………………………………...…..8. 2.3 訊號強度定位法…………………………………………….…10 2.4 入射角度定位法………………………………………….……12 第三章 室內無線定位演算法……………………………………..…14 3.1 定位演算步驟說明……………………………………….……14 3.2 資料收集………………………………………………….……19 3.2.1 訊號強度的收集……………………………………..……19 3.2.2 定義基地台和行動台的座標………………………..……19 第四章 室內定位方法之驗證……………………………………..…22 v.
(8) 4.1 建構室內傳播損失模型…………………………………….…22 4.2 驗證無線定位方法之準確性…………………………………26 4.2.1 視線內傳播…………………………………………….…26 4.2.2 非視線內傳播………………………………………….…34 4.3 應用於室內 WLAN 之系統……………………………..……37 4.4 探討無線定位方法預估誤差之生成原因及分析……………41 4.4.1 環境變動對定位準確度之探討……………………….…41 4.4.2 幾何對應法…………………………………………….…43 4.4.3 有效取樣半徑的探討……………………………………44 第五章 結論……………………………………………………….…45 參考文獻………………………………………………….………..…46 附錄一…………………………………………………………..…….47. vi.
(9) 表目錄. 表 1-1 定位方法回顧與比較…………………………………….….3 表 4-1 量測參數……………………………………………….…...25 表 4-2 傳播損失模型參數…………………………………….…...25 表 4-3 在量測路徑(site 5)所設的量測參數…………..………..…28 表 4-4 在量測路徑(site8,site9)所設的量測參數…...………….….39 表 4-5 切割區塊的大小與定位誤差的比較……………………...43. vii.
(10) 圖目錄. 圖 2-1 以抵達時間作為參考變數之定位法……………………….…7 圖 2-2 非視線傳播下行動台可能出現的區域…………………….…8 圖 2-3 利用時間差異為資訊的定位方法………………………....…9 圖 2-4 多重路徑對 TDOA 的影響……………………………….......9 圖 2-5 三圓交點即為行動台預估位置,各圓以基地台位置為圓心, 利用傳播損失推估距離為半徑…………………………...…10 圖 2-6 多重路徑衰減與遮蔽效應對訊號強度定位所造成的影響...11 圖 2-7 用角度的資訊來定位…………………………………..….…12 圖 2-8 非視線傳播造成 AOA 定位誤差………………………....…13 圖 3-1 室內定位演算法步驟流程圖……………………………...…15 圖 3-2 各基地台到行動台預估距離示意圖………………....…...…16 圖 3-3 將交集區的點作平均後作為行動台的預估點…………...…16 圖 3-4 九個時間點取樣獲得的訊號強度依據前述定位方法所推估出 各行動台預估位置……………………….……………..……17 圖 3-5 九個即時預估位置依據有效取樣半徑所畫出來的圓…...…18 圖 3-6 有效區域內的所有預估點作空間平均得到有效預估位置...18 圖 3-7 訊號產生器………………………………………………...…20 viii.
(11) 圖 3-8 頻譜分析儀……………………………………………....……20 圖 3-9 具有接收無線區域網路訊號強度的電腦……………………21 圖 4-1 site1 平面圖座落於工程四館 9 樓,量測時行動台沿著走廊移 動,為 LOS 傳播情形………………………………….….…23 圖 4-2 site2 平面圖座落於工程四館 2 樓,量測時行動台在教室沿著直 線移動,為 NLOS 傳播情形……………………………...…23 圖 4-3 site3 平面圖座落於工程四館 3 樓,量測時行動台在教室沿著直 線移動…………………………………………………………24 圖 4-4 site4 平面圖座落於工程四館 9 樓,量測時行動台沿著走廊移 動,為 NLOS 傳播情形………………………………………24 圖 4-5 位於交通大學工程四館 3 樓(site 5)之量測路徑示意圖…....27 圖 4-6 位於交通大學工程四館 3 樓(site 6)之量測路徑示意圖…....29 圖 4-7 存在直接波和非時變通道效應下的定位誤差機率分析圖...30 圖 4-8 存在直接波和非時變通道效應下的定位誤差累積機率分佈.. ………………………………………………………………. 30 圖 4-9 量測路徑 site6 的定位誤差累積機率分佈………..……...…31 圖 4-10 行動台在(1)的情形下定位誤差累積機率分佈圖………....32 圖 4-11 行動台在(2)的情形下定位誤差累積機率分佈圖…...….…33 圖 4-12 考慮時變效應下,量測路徑 site6 的定位誤差累積機率分佈 圖……………………………………………………….…...33 ix.
(12) 圖 4-13 位 於 交 通 大 學 工 程 四 館 3 樓 (site7) 之 量 測 路 徑 示 意 圖……………………………………………………….……34 圖 4-14 不存在直接波和非時變通道效應下的定位誤差機率分析 圖………………………………………………………….…35 圖 4-15 不存在直接波和非時變通道效應下的定位誤差累積機率分 佈…………………………………………………………..…35 圖 4-16 不存在直接波和時變通道效應下,行動台在固定點的定位誤 差累積機率分佈…………………………………..……...…36 圖 4-17 不存在直接波和時變通道效應下,行動台在小區域範圍移動 下的定位誤差累積機率分佈………………………..…...…37 圖 4-18 WLAN AP 之系統方塊圖,該天線內建於 WLAN 卡中.....37 圖 4-19 位於交通大學工程四館 3 樓(site8)之量測路徑示意圖…...38 圖 4-19 位於交通大學工程四館 9 樓(site9)之量測路徑示意圖..….39 圖 4-20 在量測路徑 site8 的定位誤差累積機率分佈…………....…40 圖 4-21 在量測路徑 site9 的定位誤差累積機率分佈…………....…41 圖 4-22 在量測路徑 site5 上衰減因子與 ε 67 的關係圖………….…42 圖 4-23 在量測路徑 site9 上衰減因子與 ε 67 的關係圖………….…42 圖 4-22 有效取樣半徑預估誤差圖…………………………….……44 圖 A-1 將 BS1 周圍切割成 400 個區塊並以 400 個點代表該區域..47 x.
(13) 圖 A-2 所包含的點代表最佳交集區……………………………….48. xi.
(14) 第一章 緒論 1.1 簡介 在第三代行動通訊來臨的同時,更優質的服務項目、更便捷的生 活機能將成為人類行動通訊演進的推手。在無線通訊逐漸普及的今 天,如何刺激消費者去享用購買,這些都是通訊業者積極想要突破 的。從技術層面來看除了系統本身的加值服務,如影像傳輸、行動上 網...等等。在此行動定位變成了一個很好的利基點,從定位出發找 出一個又一個的生活便利,創造更多的通訊價值。例如美國聯邦通訊 委員會(Federal Communication Commission, FCC)已提出希望所有無 線通訊業者對一般用戶使用行動電話作為緊急用途時能夠提供無線 定位功能,在 FCC 所制的 E-911 規範中,緊急電話的定位準度已經 可以適用於今日與未來的手機上了。如今又伴隨著無線區域網路的發 展,位置感知應用與服務(Location base service)也被視為一個很重要 的商業服務,特別是在室內環境,例如資源的追蹤和管理、病人的監 控...等等。. 1.2 動機 由於無線區域網路(WLAN)廣為的發展,位置感知應用與服務 (Location base service)結合被視為一個很好的應用,因此首先如何將. 1.
(15) 室內無線定位應用於其中是目前馬上面臨的問題[6]。由於 WLAN 系 統下無法做到多個基地台(AP)時間的同步,因此無法使用時間的資訊 來作定位。除了上述的問題外,傳播環境所造成的多重路徑效應和遮 蔽效應也會對定位造成嚴重誤差,在這種種因素的考量下,室內無線 定位的應用將相當受阻。因此發展一套室內定位演算法來有效的降低 誤差,變成了現今室內定位研究中所專注的議題。. 1.3 背景 由於室內行動定位在相關應用具重要性,有些改進定位準確度方 法陸續被提出來[1-5]。文獻[1]建立改良式的室內平均傳播損失模型 增進訊號強度之預估準確度並以提高定位準確度;文獻[2]則是將接 收訊號之場強做適當的空間平均以降低小尺度衰弱(small-scale fading) 效應而提昇訊號強度定位的準確度;文獻[3][4]則建立量測場強資料 庫用以比照即時行動台接收訊號場強值進而評估行動台位置;文獻[5] 利用電波傳達時間差(TDOA)定位方法評估室內行動台位置,但系統 需要能同步,現將上述參考文獻就其相關定位方法、可應用於何種系 統、限制及定位誤差整理如下表。. 2.
(16) 表 1-1 定位方法回顧與比較 參考文 定位方法. 可應用於系 限制. 獻編號. 統. [1]. [2]. [3][4]. [5]. 定位誤差. 建立改良式的室內 應用 WLAN 預知行動台的 最大定位誤 平均損失傳播模型 系統驗證. 環境來建立傳 為差 5.64 公. 來增進訊號強度之. 播模型. 尺最小定位. 準確度並以提高定. 誤差為 2.12. 位準確度. 公尺. 利用訊號強度+降 應用 WLAN 必須先降低小 67%定位誤 低小尺度衰弱來定 系統驗證. 尺度變化所造 差為 4.1 公尺. 位. 成的誤差. 建立量測場強資料 應用 WLAN 針對不同的環 75%定位誤 庫用以比照即時行 系統驗證. 境必須額外再 差為 1.5 公尺. 動台接收場強值進. 去建立場強的. 而評估行動台位置. 資料庫. 利用電波傳達時間 應用 WLAN 基地台和行動 差(TDOA)定位方 系統驗證 法來計算行動台位 置. 3. 台必須同步.
(17) 1.4 目的 本論文將發展 WLAN 室內系統定位讓室內無線定位可以確實被 應用是本論文的目的,本論文將從現有的 WLAN 系統中,利用已有 的訊號強度資訊來進行室內定位,在最小的軟硬體改變下是本論文的 優點。現行的 WLAN 系統中,行動台可以接收到各基地台的訊號強 度值,根據收到的每一個訊號強度,對應出空間中所代表的幾何意 義,最後再根據這些幾何圖形找出行動台最有可能出現的位置。本論 文將利用訊號強度來定位並透過對空間上行動台的預估位置作有效 取樣來達到定位誤差的縮小。. 1.5 論文架構 本論文將從基本定位原理的介紹,室內定位演算法的構思與步 驟,到最後實測結果的驗證。第二章我們回顧傳統以電波訊號強度 (Signal Strength)、電波抵達時間(Time of Arrival,簡稱 TOA)、電波抵 達時間差(Time Difference of Arrivals,簡稱 TDOA)或電波入射角度 (Angle of Arrival,簡稱 AOA)為參考變數的無線定位法。其次討論造成 定位誤差的可能原因;其中包括多重路徑傳播效應(Multipath )、非視 線(NonLight of Sight,簡稱 NLOS)傳播效應及時變通道效應等。第三章 將本論文所提出的室內定位方法作詳細的說明。第四章利用頻譜分析. 4.
(18) 儀和裝有 WLAN 卡的電腦做實際的量測來驗證應用本研究所提之室 內定位演算法,並評估定位的準確度是否達到我們預期的效果,第五 章結論。. 5.
(19) 第二章 無線定位原理 無線定位系統通常利用電波傳達時間(Time of Arrival, TOA),電 波傳達時間差(Time Difference of Arrival, TDOA),電波訊號強度 (Signal Strength)及電波入射角度(Angle of Arrival, AOA)等無線訊號 量測作為定位時的參考變數,將行動台的位置定出來,其基本原理是 基地台利用行動台與基地台的相對距離或行動台相對於基地台的方 向來計算行動台位置。. 2.1 TOA 定位法 利用量測訊號在基地台與行動台之間的傳播時間,來推估出行動 台和基地台之間的距離[7]。在基地台和行動台同步下基地台在時間 T1 收到行動台一訊號,而已知行動台是在時間 T0 時發射,所以我們可以 推估基地台和行動台之間的距離 R1 如下式表示,其中 C 為光速。 R1 = (T1 − T0 ) × C. (2.1). 將此資訊對應到幾何圖形上,便是以基地台為圓心 R1 為半徑畫 圓,行動台必會落在圓上的一點。但我們不知行動台在圓上的哪一 點,所以至少還必須要再存在兩個基地台,分別在時間 T2 與 T3 收到行 動台在時間 T0 時所同時發出的訊號,來推估行動台與兩個基地台的距 離,公式如下:. 6.
(20) R2 = (T2 − T0 ) × C. (2.2). R3 = (T3 − T0 ) × C. (2.3). 同樣的,我們亦可以推斷行動台應處在 BS2 與 BS3 所圍成的圓 上,將上述所推導三個圓的交點就是行動台的位置,如圖 2-1 所示。. 圖 2-1 以抵達時間作為參考變數之定位法. 而此定位方法會因視線波被障礙物阻擋時,訊號必須由反射或繞 射來傳播這種現象稱為非視線(Non-Line of Sight, NLOS)傳播,它會造 成訊號傳播時間的延遲,此時上述的三圓就不會交於一點而會是一個 區域,它將會造成定位的誤差,如圖 2-2 所示。其中: R _ 1 = R1 + α 1C. (2.4). 7.
(21) R _ 2 = R2 + α 2C. (2.5). R _ 3 = R3 + α 3C. (2.6). R _1 、 R _ 2 、 R _ 3 為各基地台量測距離, R1 、 R2 、 R3 為行動台到各基. 地台實際距離, α1 、 α 2 、 α 3 為行動台到各基地台的延遲時間。. 圖 2-2 非視線傳播下行動台可能出現的區域. 2.2 TDOA 定位法 TDOA 是測量訊號由行動台到達兩個基地台的時間差,換成幾何 位置來看行動台到兩基地台的距離差會成一個雙曲線如下式所表示: R12 = (t1 − t2 ) × C = (X1 − x) 2 + (Y1 − y ) 2 − ( X 2 − x) 2 + (Y2 − y ) 2. (2.7). 其中 t1 和 t2 分別是行動台到達基地台的時間,C 是光速, ( X 1 , Y1 ) 和 ( X 2 , Y2 ) 分別是基地台的位置,而行動台位置就落於這雙曲線上的任一. 8.
(22) 點。若要定出行動台的位置至少需要三個基地台間任意兩條由 TDOA 所構成的雙曲線來決定[8],而行動台就位於此兩條雙曲線的交點, 如圖 2-3 所示:. 圖 2-3 利用時間差異為資訊的定位方法. 然而此 TDOA 定位法仍然會由於多重路徑傳播所造成定位上的 誤差,此時行動台位置已不會落在兩雙曲線上的交點,而是會形成一 個區域,如圖 2-4 所示:. 圖 2-4 多重路徑對 TDOA 的影響 9.
(23) 2.3 訊號強度定位法 訊號強度定位法是利用通道傳播模型去描述路徑損耗對於距離 的衰減情形。欲利用此一資訊進行定位,需事先建構該環境的傳播損 失模型,才能藉由訊號強度的衰減來決定行動台和基地台的距離,該 行動台位置應位於以對應基地台為圓心預估距離為半徑所畫的圓 上,如所以說需要至少有三個基地台方能進行定位,下圖(圖 2-5)顯 示利用三個基地台對應預估半徑(在自由真空環境中)分別畫的三個 圓之交點即為行動台之預估位置。. 圖 2-5 三圓交點即為行動台預估位置,各圓以基地台位置為圓心,利 用傳播損失推估距離為半徑 其中 R1、R2 及 R3 分別代表利用通道傳播模型及 BS1,BS2 及 BS3 基地台傳播至行動台之損失所推算的預估距離。這裡將採用 10.
(24) log-distance model 作為室內傳播模型[9],可推出個別的傳播距離:. P L ( d ) = P L ( d 0 ) + 10 n lo g 1 0 ( d ). d = 10. ( P L ( d ) − P L ( d 0 )) 10 n. (2.8). 其中 d 為行動台到基地台距離, PL(d ) 為平均傳播損失, PL(d0 ) 為傳播 路徑距離為一公尺的傳播損失,n 是傳播衰減因子(decay factor)。 由於無線電在室內傳播呈現多重路徑干擾衰弱與遮蔽效應造成 接收訊號強度與自由真空傳播結果會有很大的差距,於是預估的傳播 距離將產生誤差,如此行動台的預估位置不會如前述將交於一點而會 落於一個預估區域內,如圖 2-6 所示,其中 ri 代表考慮多重路徑衰落 及遮蔽效應所推算出來的預估距離。. 圖 2-6 多重路徑衰減與遮蔽效應對訊號強度定位所造成的影響. 11.
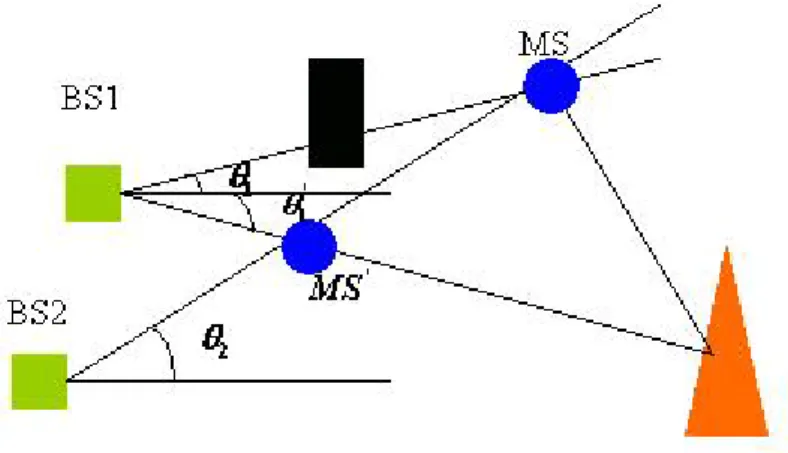
(25) 2.4 入射角度定位法 基地台利用陣列天線接收從行動台所發射的訊號,透過陣列訊號 處理算出訊號抵達基地台的入射角度,要決定行動台的位置至少需要 兩個以上的基地台提供入射角(AOA 值)的資訊,如圖 2-7 所示。. 圖 2-7 用角度的資訊來定位. 然而由於受到區域散射和非視線傳播影響,使的訊號的入射角度 改變而造成定位的誤差,如圖 2-8 所示,圖中因為基地台(BS1)的視 線波被障礙物阻擋,訊號經由反射到達基地台,基地台誤判入射角為. θ 1' ,進而將手機的位置預估在 MS ' 。. 12.
(26) 圖 2-8 非視線傳播造成 AOA 定位誤差. 13.
(27) 第三章 室內無線定位演算法 本章將對本論文所提出的訊號強度定位法加以討論,此一演算法 的最大特色在於可連續監測並結合有效的空間取樣平均法來降低定 位的誤差。以下我們將對訊號強度定位演算法的步驟與流程做進一步 說明。. 3.1 定位演算步驟說明 本節將針對定位的流程做詳細的介紹,從利用室內傳播模型推導 出基地台與行動台距離到行動台的預估位置可以分成以下三個步驟 說明,步驟流程圖如圖 3-1 所示。 步驟一: 利用室內傳播平均損失預估模型計算每個基地台與行動台 間之距離 將行動台收到的各基地台之訊號強度(RSSI)帶入室內傳播模型 推算出各基地台與行動台之間的距離分別定義為 R1 、 R2 、 R3 .. RN ,可 表示如下:. R k = 10. ( PL k − PLko ) 10 n. k=1,2,3...N. (3.1). 其中 Rk : 傳播距離(m) PLk : 行動台與第 k 個 BS 之間的傳播損失. PLko : 行動台與第 k 個 BS 之間傳播距離為一公尺的路徑損失. n : 傳播損失因子 14.
(28) 將步驟一所得到的資訊對應到幾何圖形上可以由圖 3-2 來表示,如何 將此幾何圖形的交集區求出到推出行動台預估位置,我們將於步驟二 來說明。. 圖 3-1 室內定位演算法步驟流程圖. 15.
(29) 圖 3-2 各基地台到行動台預估距離示意圖. 步驟二: 透過重心法找出行動台預估位置 由行動台提供接收訊號強度資訊所構成的三圓相交後所行成的 誤差範圍,將誤差範圍的交集區求出[參考附錄一]利用重心法[10]推 出行動台預估位置如圖 3-3 所示。. 圖 3-3 將交集區的點作平均後作為行動台的預估點 16.
(30) 步驟三:利用連續量測和有效的空間取樣找出有效區域 行動台在時間軸上分別讀取來自各基地台之訊號強度(S(t)),例 如在 9 個時間點取樣即可獲得 { S ( t1 ), S ( t 2 )... S ( t9 )} ,再利用前述方法即 可以計算九個行動台預估位置 { Pt 1 , Pt 2 ... Pt 9 },如圖 3-4 所示。圖中點 MS 代表行動台所在的真實位置,而 Pti 則表示在時間 t i 時對應的預估位 置,其中 i=1,2...9。此處 Pti 可用 Pti ( xti , yti ) 表示其對應 x-y 平面各軸之 讀值。圖 3-4 之座標我們是以 BS1 位置做為座標原點。. 圖 3-4 九個時間點取樣獲得的訊號強度依據前述定位方法所推估 出各行動台預估位置 於是我們分別以各個預估位置為圓心並以該環境之有效取樣半 徑 R 畫圓,結果如圖 3-5 所示,接著即判斷各圓所覆蓋區域所涵蓋 預估位置之總點數,以覆蓋總點數最多之圓當作該次定位之有效區 17.
(31) 域。. 圖 3-5 九個即時預估位置依據有效取樣半徑所畫出來的圓 將有效區域內的所有預估點作空間平均即可得到行動台的有效 預估位置。如圖 3-6 所示,其中 MS 是表示行動台真實位置, Wt 5 是 經過本研究方法計算而得的行動台有效預估位置。. 圖 3-6 有效區域內的所有預估點作空間平均得到有效預估位置 18.
(32) 3.2 資料收集 3.2.1 訊號強度的收集 在本論文中我們主要是利用行動台所接收到各個基地台的訊號強 度資訊來進行定位,為了得到訊號強度資訊,我們則利用頻譜分析儀 來代替基地台(BS)而訊號產生器代替行動台(MS)去做訊號強度的收 集,量測儀器實體圖如圖 3-7,3-8 所示。另外我們也將使用可接收無線 區域網路訊號強度的電腦去實際做訊號強度的收集,量測儀器實體圖 如圖 3-9。我們將於第四章分別對這兩種不同的量測儀器所收集到的 訊號強度資訊去做定位。. 3.2.2 定義基地台和行動台的座標 為了得到行動台的有效預估位置並與正確位置作比對,我們必須 事先紀錄基地台(BS)座標及行動台的位置座標,在本論文中我們是用 行動台接收到三個基地台(BS)的訊號強度來做室內定位,我們分別紀 錄 AP 的座標為 ( X Ap1 , YAp1 ) , ( X Ap 2 , YAp 2 ) , ( X Ap 3 , YAp 3 ) ,而我們所要定位的 行動台也紀錄其座標為(x,y)。. 19.
(33) 圖 3-7 訊號產生器. 圖 3-8 頻譜分析儀. 20.
(34) 圖 3-9 具有接收無線區域網路訊號強度的電腦. 21.
(35) 第四章 室內定位方法之驗證 為驗證本室內定位方法的準確性及應用性,本章首先使用頻譜分 析儀所量得的訊號強度資訊去驗證該定位法的準確性,然後再將該方 法應用於室內無線區域網路(WLAN)系統中,並統計實際定位之誤 差,探討該方法在實際平台之應用情況,最後歸納及探討誤差生成的 原因。. 4.1 建構室內傳播損失模型 本論文採用頻譜分析儀實際量測之平均傳播損失建構室內平均 傳播損失模型,這裡將採用 2.1 式做為室內傳播模型,並利用 least square fitting 方法評估最佳 n 值。 以下利用在交通大學工四館根據不同的環境量測到的數據建構 室 內 傳 播 損 失 模 型 , 圖 4-1,4-2,4-3 及 4-4 分 別 顯 示 量 測 地 點 site1,site2,site3 及 site4 之平面圖,量測參數則如表 4-1 所示。. 22.
(36) 圖 4-1 site1 平面圖座落於工程四館 9 樓,量測時行動台沿著走廊移 動,為 LOS 傳播情形. 圖 4-2 site2 平面圖座落於工程四館 2 樓,量測時行動台在教室沿 著直線移動,為 NLOS 傳播情形 23.
(37) 圖 4-3 site3 平面圖座落於工程四館 3 樓,量測時行動台在教室沿著 直線移動. 圖 4-4 site4 平面圖座落於工程四館 9 樓,量測時行動台沿著走廊移 動,為 NLOS 傳播情形. 24.
(38) 表 4-1 量測參數 測試儀器. 訊號產生器、頻譜分析儀. 中心頻率. 2.3GHz. 發射功率. 14dBm. 發射天線高度. 1.8m. 接收天線高度. 1.8m. 樣本個數. Site1:120 個 Site2:120 個 Site3:180 個 Site4:120 個. 樣本間距. 0.5 波長. 為了去除小尺度衰弱效應(Small-scale fading effect)的影響,我 們事先做移動平均(moving average)的處理[11],此三個不同的環境所 建立的傳播損失模型參數可以由下表 4-2 所示。. 表 4-2 傳播損失模型參數. Decay factor (n). Site1(LOS) Site2(NLOS) Site3(LOS Site4(NLOS) and NLOS) 1.73 3.64 3.24 3.46. 25.
(39) 由表可知在site1 由於走廊波導效應所以n=1.73 小於free space 的 n值,site2 屬於非直接波的環境下n=3.64,site3 有些量測為直接波和 有些量測為非直接波的情形n=3.24,site4 為行動台與基地台隔著一個 走廊轉角屬於非直接波的環境n=3.46,n=3.46 與site2 之結果相近。. 4.2 驗證無線定位方法之準確性 本節我們利用頻譜分析儀在不同室內環境實際量測傳播損失,這 些量測數據可供驗證定位法預估準確度之用。. 4.2.1 視線內傳播 直接波存在時,探討在此條件下時變通道效應和非時變通道效應 對定位準確度的影響。. A 非時變通道 量測時行動台在固定位置接收,訊號強度幾乎不隨時間變動。量 測路徑(site 5)示意圖為圖 4-5,表 4-3 為量測參數的設定。. 26.
(40) 圖 4-5 位於交通大學工程四館 3 樓(site 5)之量測路徑示意圖. 代表 BS 之位置 代表 MS 之位置. 27.
(41) 表 4-3 在量測路徑(site 5)所設的量測參數 量測地點. 交通大學工程四館 3 樓. 測試儀器. 訊號產生器、頻譜分析儀. 中心頻率. 2.3GHz. 發射功率. 14dBm. 發射天線高度. 1.8m. 接收天線高度. 1.8m. 樣本個數. 60 個. 評估本研究之定位方法準確度時,我們選擇有效取樣半徑 R_ e =2.5 公尺及衰減因子 n=3.34,利用定位誤差的機率密度分佈與. 機率累積分佈函數(CDF),作為評估本研究定位方法準確度的評量。 圖 4-7 為定位誤差的機率密度分佈圖,而定位誤差累積分佈函數, CDF 如圖 4-8 所示,圖中顯示 67%機率的定位誤差值在 4.7 公尺以 內。此處的傳播衰減因子值是根據圖 4-5 的量測路徑所建立的,為了 評估傳播衰減因子對本定位方法準確度的影響,我們將量測不同路徑 Site6 如圖 4-6 所示,而不改變傳播衰減因子去進行定位。量測參數 和有效取樣半徑皆和上述相同。由圖 4-9 所顯示的定位誤差累積機 28.
(42) 率,有 67%機率的定位誤差在 5.6 公尺以內,我們由此結果可以得知 建構適合環境的傳播損失模型將提高定位的準確度。. 圖 4-6 位於交通大學工程四館 3 樓(site 6)之量測路徑示意圖. 29.
(43) 0.3. Probability density(%). 0.25. 0.2. 0.15. 0.1. 0.05. 0. 0. 5. 10. 15. error (m). 圖 4-7 存在直接波和非時變通道效應下的定位誤差機率分析圖. 1 0.9. Probability[abscissa<error]. 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0 0. 1. 2. 3. 4. 5. 6. 7 8 error(m). 9. 10. 11. 12. 13. 14. 15. 圖 4-8 存在直接波和非時變通道效應下的定位誤差累積機率分佈 30.
(44) 1 0.9. Probability[abscissa<error]. 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0 0. 1. 2. 3. 4. 5. 6. 7 8 error(m). 9. 10. 11. 12. 13. 14. 15. 圖 4-9 量測路徑 site6 的定位誤差累積機率分佈. B 時變通道 (1) 行動台固定不動,但通道中有其他物體移動,如行人。 (2) 這裡我們考慮行動台在 1 公尺 x 1 公尺的範圍中移動。 由於(1)或(2)兩種情形會造成行動台接收訊號強度隨著時間變 動。 量測路徑示意圖和圖 4-5 所示一樣,而量測參數設定和表 4-3 相同,環境參數 R− e =2.5 公尺,n=3.34。在(1)與(2)情形下樣本個數分別 採取 60 個和 63 個。 在考慮時變通道效應後,行動台在(1)的情形下定位誤差累積機 率分佈如圖 4-10 所示,有 67%機率的定位誤差落在 4.25 公尺以內。. 31.
(45) 行動台在(2)的情形下定位誤差累積機率分佈如圖 4-11,有 67%機率 的定位誤差落在 4.55 公尺以內。另外我們針對在量測路徑 site6 時考 慮時變通道效應所做出來的定位誤差如圖 4-12,有 67%機率的定位 誤差在 4.8 公尺。由上述結果,我們得知此定位方法在時變通道效應 下的定位準確度比在非時變通道效應下還要準確,因為在非時變通道 效應下由於行動台接收到的訊號強度值都幾乎一樣,於是藉由室內傳 播模型所推估的預估位置都幾乎落於同一點,而無法在空間上做有效 的篩選。本研究之定位方法適應於時變通道上之應用。. 1 0.9. Probability[abscissa<error]. 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0. 0. 1. 2. 3. 4. 5. 6. 7 8 error(m). 9. 10. 11. 12. 13. 14. 15. 圖 4-10 行動台在(1)的情形下定位誤差累積機率分佈圖. 32.
(46) 1 0.9. Probability[abscissa<error]. 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0. 0. 1. 2. 3. 4. 5. 6. 7 8 error(m). 9. 10. 11. 12. 13. 14. 15. 圖 4-11 行動台在(2)的情形下定位誤差累積機率分佈圖. 1 0.9. Probability[abscissa<error]. 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0. 0. 1. 2. 3. 4. 5. 6. 7 8 error(m). 9. 10. 11. 12. 13. 14. 15. 圖 4-12 考慮時變效應下,量測路徑 site6 的定位誤差累積機率 分佈圖 33.
(47) 4.2.2 非視線內傳播 沒有直接波存在的情況下,去探討在此條件下時變通道量效應和 非時變通道效應下對定位準確度的影響。. A 非時變通道 量測路徑(site7)示意圖如圖 4-13 所示,量測參數與環境參數設定 和量測路徑 site5 所設定的參數一樣。. 圖 4-13 位於交通大學工程四館 3 樓(site 7)之量測路徑示意圖 代表 BS 之位置 代表 MS 之位置 34.
(48) 利用定位誤差的機率密度分佈與累積機率分佈函數(CDF),探討 在此環境下之定位方法準確度的評量。圖 4-14 為定位誤差的機率密 度分佈圖。而定位誤差累積機率分佈,CDF 如圖 4-15 所示,圖中顯 示 67%機率的定位誤差值在 6 公尺以內。 0.25. Probability density(%). 0.2. 0.15. 0.1. 0.05. 0. 0. 5. 10. 15. error (m). 圖 4-14 不存在直接波和非時變通道效應下的定位誤差機率分析圖. 1 0.9. Probability[abscissa<error]. 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0 0. 1. 2. 3. 4. 5. 6. 7 8 error(m). 9. 10. 11. 12. 13. 14. 15. 圖 4-15 不存在直接波和非時變通道效應下的定位誤差累積機率分佈. 35.
(49) B 時變通道 行動台的定位狀態、量測參數與環境參數等相關資料設定與和量 測路徑 site5 在考慮時變通道效應時所設定的皆相同,量測路徑示意 圖和圖 4-13 一樣。 在考慮時變通道效應後,行動台在固定點的定位誤差累積機率分 佈如圖 4-16 所示,有 67%機率的定位誤差約落在 5.1 公尺以內。行 動台在小區域動下的定位誤差累積機率分佈如圖 4-17 所示,有 67% 機率的定位誤差約落在 5.5 公尺以內。. 1 0.9. Probability[abscissa<error]. 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0. 0. 1. 2. 3. 4. 5. 6. 7 8 error(m). 9. 10. 11. 12. 13. 14. 15. 圖 4-16 不存在直接波和時變通道效應下,行動台在固定點的定位 誤差累積機率分佈. 36.
(50) 1 0.9. Probability[abscissa<error]. 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0. 0. 1. 2. 3. 4. 5. 6. 7 8 error(m). 9. 10. 11. 12. 13. 14. 15. 圖 4-17 不存在直接波和時變通道效應下,行動台在小區域範圍移 動下的定位誤差累積機率分佈. 4.3 應用於室內 WLAN 之系統 為了解本無線定位方法應用於實際系統之準確性,於是在工程四 館 3 樓及 9 樓分別架設三個 WLAN APs 進行定位測試。該 WLAN AP 之系統方塊圖如下所示:. 圖 4-18 WLAN AP 之系統方塊圖,該天線內建於 WLAN 卡中 37.
(51) 實測中,行動台(WLAN 卡)也與筆記型電腦結合,可直接紀錄各 WLAN AP 之訊號強度(RSSI)。位於 site8 及 site9 之量測路徑可見圖 4-19,4-20,表 4-4 為量測參數等相關資料。. 圖 4-19 位於交通大學工程四館 3 樓(site 8)之量測路徑示意圖. 38.
(52) 圖 4-19 位於交通大學工程四館 9 樓(site 9)之量測路徑示意圖. 表 4-4 在量測路徑(site8,site9)所設的量測參數 量測地點 測試儀器. 交通大學工程四館 3 樓及 9 樓 可量測無線區域網路訊號強度的電腦. 中心頻率. 2.4GHz. 發射功率. 15dBm. 發射天線高度. 1.8m. 接收天線高度. 1.8m. 樣本個數. 60 個. 39.
(53) 評估本研究之定位方法準確度時,我們選擇有效取樣半徑 R− e =2.5 公尺及衰減因子 n=3.34,利用定位誤差的累積機率分佈作為. 評估本研究定位方法準確度的評量。量測路徑 site8 的定位誤差累積 機率分佈如圖 4-20 所示,有 67%機率的定位誤差落在 4.5 公尺以內。 量測路徑 site9 的定位誤差累積機率分佈如圖 4-21 所示,有 67%機率 的定位誤差落在 5.3 公尺以內。. 1 0.9. Probability[abscissa<error]. 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0. 0. 1. 2. 3. 4. 5. 6. 7 8 error(m). 9. 10. 11. 12. 13. 14. 15. 圖 4-20 在量測路徑 site8 的定位誤差累積機率分佈. 40.
(54) 1 0.9. Probability[abscissa<error]. 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0. 0. 1. 2. 3. 4. 5. 6. 7 8 error(m). 9. 10. 11. 12. 13. 14. 15. 圖 4-21 在量測路徑 site9 的定位誤差累積機率分佈. 4.4 探討無線定位方法預估誤差之生成原因及分析 本節我們將探討環境變動、空間切割和有效取樣半徑對本定位方 法之準確度的影響。. 4.4.1 環境變動對定位準確度之探討 本節我們將探討變更傳播衰減因子對本定位準確度的影響,即考 慮傳播環境變動時由於衰減因子之掌握性不佳,可能造成預估準確度 下降,這裡採用量測路徑 site5 和 site9 在時變通道效應下行動台在固 定點所量得的訊號強度資訊,分別去變更衰減因子參數來探討定位準 確度的影響可見圖 4-22 及圖 4-23。圖 4-22 表示 n versus ε 67 , ε 67 表示 67%的機率預估誤差值會小於該值,而 n 是表示衰減因子。 41.
(55) 10 9. 67%distance error(m). 8 7 6 5 4 3 2 1.5. 2. 2.5. 3. 3.5 decay factor. 4. 4.5. 5. 5.5. 圖 4-22 在量測路徑 site5 上衰減因子與 ε 67 的關係圖. 10. 67%distance error(m). 9. 8. 7. 6. 5. 4 1.5. 2. 2.5. 3. 3.5 decay factor. 4. 4.5. 5. 5.5. 圖 4-23 在量測路徑 site9 上衰減因子與 ε 67 的關係圖. 42.
(56) 4.4.2 幾何對應法 將 BS1 的周圍做切割成 400 個小區域。再利用這 400 個點來判 別其他圓在該區域的交集情形,藉以避開繁雜的數學計算。但其中切 割的間隔該取多大,也是一個值得深思的問題。間隔過小會使的計算 量遽增,間隔過大又不足以代表整個區域。為此我們將間隔的大小做 改變,針對量測路徑 site6 有時變通道效應下的量測資料重新進行定 位的評估,得到結果如表 4-5 所示:. 表 4-5 切割區塊的大小與定位誤差的比較 BS1 周圍切割區塊數. 67%的定位誤差. 100. 5.12m. 400. 4.80m. 1600. 4.62m. 6400. 4.56m. 由實驗結果發現,間隔過大將使的定位準確度下降,但是間隔越 小也沒有相對的將準確度提高。但我們可以發現,當我們取 400 點作 定位時準確度便以達到 1600 點甚至 6400 點的水準。因此在計算量以 及準確度的雙重考量下我們選擇 400 點作為我們的切割依據。. 43.
(57) 4.4.3 有效取樣半徑的探討 為探討有效取樣半徑對定位方法準確度之影響,於是整合量測路 徑 site5 及 site7 之時變通道效應下的量測數據,評估在不同的有效取 樣半徑 R− e 值時,期對應之預估誤差值。 圖 4-24 表示 R− e versus ε 67 , ε 67 表示 67%的機率預估誤差值會 小於該值,由圖 4-24 可以看出有效取樣半徑在 2.3~3.5 公尺範圍內時 定位誤差最小,而且定位誤差有隨著有效取樣半徑變大而縮小的趨 勢,但有效取樣半徑大到一個程度之後定位誤差不會跟著縮小,因為 此時有效取樣半徑以把全部的預估位置都考慮進去了。在本論文中有 效取樣半徑皆是取 2.5 公尺,若要使定位準確度提高,可以從有效半 徑來考慮,在不同的環境中藉由統計的方法都可以找出一個最佳有效 取樣半徑。. 圖 4-22 有效取樣半徑預估誤差圖 44.
(58) 第五章 結論 本論文設計一改良式的室內訊號強度定位法,該方法利用連續取 樣信號強度資訊並結合有效的空間取樣平均法降低定位的誤差,此外 在考量減輕系統的運算負荷量與定位即時性,特別發展如附錄一所提 出的方法避開繁雜的數學計算而仍能有效評估預估區域。另外我們應 用頻譜分析儀系統量測結果驗證本定位法的準確性,我們可以發現存 在直接波而且有時變效應的環境下,本定位方法最準確有 67%機率的 定位誤差在 4.25 公尺以內,而沒有存在直接波和非時變通道效應下, 定位誤差最大,有 67%機率的定位誤差在 6 公尺以內。此外,為了解 該定位方法應用於實際系統之有效性,於是在室內架設三個 WLAN APs 進行定位測試,考慮在該環境下建立的傳播損失模型下定位,可 以有 67%的定位誤差在 4.5 公尺以內,將相同的傳播損失模型用於不 同的量測環境則 67%的定位誤差在 5.3 公尺以內。最後我們分析傳播 衰減因子、幾何對應法及有效取樣半徑對定位誤差的影響,得知傳播 衰減因子對本定位方法之預估誤差影響最大,幾何對應法對定位誤差 的衝擊最小。有效取樣半徑選取越大時定位誤差則越小,但當該半徑 之對應圓可涵蓋所有取樣點之預估位置時,定位誤差將趨於不變動狀 態。. 45.
(59) 參考文獻 [1]. Yongguang Chen; Kobayashi, H.; “Signal strength based indoor geolocation,". Communications, 2002. ICC 2002. IEEE International Conference on , Volume: 1 , 28 April-2 May 2002 ,Pages:436 – 439 [2] Youssef, M.; Agrawala, A.; “Small-scale compensation for WLAN location,". [3]. [4]. [5]. [6]. [7]. determination systems .Wireless Communications and Networking, 2003. WCNC 2003. 2003 IEEE , Volume: 3 , 16-20 March 2003 ,Pages:1974 - 1978 Rong-Hong Jan; Yung Rong Lee;” An indoor geolocation system for wireless LANs,”Parallel Processing Workshops, 2003. Proceedings. 2003 International Conference on , 6-9 Oct. 2003 ,Pages:29 – 34 Prasithsangaree, P.; Krishnamurthy, P.; Chrysanthis, P.;” On indoor position location with wireless LANs,”Personal, Indoor and Mobile Radio Communications, 2002. The 13th IEEE International Symposium on , Volume: 2 , 15-18 Sept. 2002 ,Pages:720 - 724 Xinrong Li; Pahlavan, K.; Latva-aho, M.; Ylianttila, M.;” Comparison of indoor geolocation methods in DSSS and OFDM wireless LAN systems,”Vehicular Technology Conference, 2000. IEEE VTS-Fall VTC 2000. 52nd , Volume: 6 , 24-28 Sept. 2000 ,Pages:3015 - 3020 Wallbaum, M.; “WhereMoPS: an indoor geolocation system,” Personal,Indoor and Mobile Radio Communications, 2002. The 13th IEEE International Symposium on , Volume: 4 , 15-18 Sept. 2002 ,Pages:1967 - 1971 G.P.Yost, and S.Panchapakesan,“Automatic Location Identification Using a Hybrid Technique,"IEEE 48th Vehicular Technology Conference, Westin Hotel,. Ottawa, Canada, May 18-21, 1998, pp.264-267. [8] T.S. Rapaport, J.H. Reed, and B.D. Woerner,“Position Location Using Wireless Communications on Highways of the Future,"IEEE Communications Magazine, October 1996,pp.33-41. [9] Theodore S. Rappaport , Wireless Communication, Upper Saddle River ,NJ: Prentice Hall,1996 [10] 陳昭仁 TOA 無線定位法則之研究,國立交通大學,國立交通大學電信工程 研究所碩士論文(90) [11] Jay Weitzen, Terri J. Lowe,“Measurement of Angular and Distance Correlation Properties of Log-Normal Shadowing at 1900MHz and Its Application to Design PCS Systems,"Vehicular Technology, IEEE Transactions on, Volume:51 Issue: 2,March 2002 ,Page(s):265-273. 46.
(60) 附錄一 預估區域的評估 我們將分成下列兩個步驟去說明如何求得誤差範圍交集區。 步驟一: 將訊號強度最強的基地台之有效範圍切割 n 2 個相等區域 行動台接收到各基地台所發送的訊號強度,我們判別那一個基地 台(BS)所接收到最強的訊號強度,此 BS 定義為 BS1,假設 BS1 的座 標是 ( X Ap1 , YAp1 ) 半徑是 R1 ,以 ( X Ap1 , YAp1 ) 為中心,周圍 2 R1 的範圍內做空 間的切割,將這塊區域均勻的切割成 400 個小區塊,在以這些小區塊 的中心點作為該區塊的代表。如圖 A-1 所示,並定義這 400 點為:. Pj = ( x j , y j ). 其中 j=1,2,3..400. 圖 A-1 將 BS1 周圍切割成 400 個區塊並以 400 個點代表該區域 47.
(61) 步驟二:利用幾何不等式及邏輯運算式找出交集區 將 400 個點帶入基地台所建構的幾何不等式,查看該點是否落在 圓內,並透過簡單的邏輯判斷找出符合最多交集的點。上述的幾何不 等式如下所示:. Ai = ( x j − X Api )2 + ( y j − YApi )2 ≤ Ri. (A-1). 其中 : i=1,2,3 j=1,2,3..399,400 不等式 Ai 是用來判別 400 點 中哪一些點是滿足在圓內,再利用以下 邏輯判別式找出最佳交集區:. B = A1 ∪ A2 ∪ A3. (A-2). C = m ax[ B ]. (A-3). 判別式 B 是表示這 400 點中哪一些點是符合上述的幾何不等式 所形成的交集區,而 C 是把 B 的最大值都挑出來,而這些點便可以 代表我們所要求的最佳交集區,如圖 A-2 所示:. 圖 A-2 所包含的點代表最佳交集區. 48.
(62)
數據


![表 1-1 定位方法回顧與比較 參考文 獻編號 定位方法 可應用於系統 限制 定位誤差 [1] 建立改良式的室內 平均損失傳播模型 來增進訊號強度之 準確度並以提高定 位準確度 應用 WLAN系統驗證 預知行動台的環境來建立傳播模型 最大定位誤 為差 5.64 公尺最小定位誤差為 2.12公尺 [2] 利用訊號強度+降 低小尺度衰弱來定 位 應用 WLAN系統驗證 必須先降低小尺度變化所造成的誤差 67%定位誤 差為 4.1 公尺 [3][4] 建立量測場強資料 庫用以比照即](https://thumb-ap.123doks.com/thumbv2/9libinfo/8418668.180378/16.892.132.764.124.1146/參考文預知行最大定定位誤差公尺利用訊號強度+降低小尺度衰弱.webp)
+7





Outline
相關文件
按下確定即可產生 DataSet (資料集),再利用 DataAdapter 中 Fill 方法即可將所設定的查詢內 容填入 DataSet 當中..
z按下確定即可產生 DataSet (資料集),再 利用 DataAdapter 中 Fill 方法即可將所設 定的查詢內容填入 DataSet 當中.. DataGrid
式,都是將終極實在理解為實體性的存在,本文沿用「根源實在論」 [註 2]
3、 輸入文字(Input Text):所產生的文字框具固定寬度,可以讓
能容忍我的無神 論,能容忍我在國內和國外自由發表我的無神論的思想,從沒有人因此用石頭
4.經中央目的事業主管機關認定符合之種苗 業登記證、符合農業發展條例第3條規定 之農民或農民團體證明文件、具備蘭花產 業經營事實之事業單位證明、具備食用蕈
本計劃的目的是透過 發展具校本特 色的語文課程,以加強學生在文學 和中華文化的學習。學校可善用課 程提供的「建議篇章」
本書立足中華文化大背景,較為深入系統地分析研究了回族傳統法文化的形成基礎、發展歷
