國 立 交 通 大 學
電子物理研究所
博 士 論 文
利用全像光學鑷夾三維操控微粒子之研究
A study of 3-dimensional manipulation of microparticles
by using holographic optical tweezers
研 究 生:曾勝陽
指導教授:徐 琅 教授
利用全像光學鑷夾三維操控微粒子之研究
A study of 3-dimensional manipulation of microparticles
by using holographic optical tweezers
研究生 : 曾勝陽 Student : Sheng-Yang Tseng
指導教授 : 徐 琅 Advisor : Long Hsu
國 立 交 通 大 學
電 子 物 理 研 究 所
博 士 論 文
A Thesis
Submitted to Institute of Electrophysics College of Science
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Philosophy
in
Electrophysics
October 2011
Hsinchu, Taiwan, Republic of China
i
利用全像光學鑷夾三維操控微粒子之研究
學生:曾勝陽
指導教授:徐 琅
國立交通大學 電子物理研究所 博士班
摘要
全像光學鑷夾(holographic optical tweezers HOTs)是一套利用空間光調變器(spatial light modulator SLM)控制光學鑷夾中捕捉光場性質的系統。只要顯示所需的相位圖樣於 SLM 上,即可同時操控多個微粒子。但 HOTs 的操作需要用到許多不同領域的知識,如富氏 光學、電腦全像片演算法、程式語言與數值方法,研究者需要同時具備這些知識才能將 HOTs 當成工具用於自己的研究上,因此限制了 HOTs 的應用。因此在本論文中我們發 展了兩種方法來擴展 HOTs 操控微粒子能力。 一種是發展控制光場橫向動量(或散射力)的方法,讓粒子在一個固定相位圖樣所產生的 光場下,自行沿著設定的路徑移動,而無需其他外力。我們利用幾何光學分析 HOTs 中 光場的橫向動量分布,發現只要將相位圖樣顯示在 SLM 上的某個方位角區域中,HOTs 所產生的光場橫向動量的方向是由該方位角區域的中心角度決定,而橫向動量的大小是 正比於入射光的功率、光場強度分布與 sin(),其中是方位角區域的範圍大小。我 們利用此方法產生的具有橫向動量分布的光場,讓微粒子自行沿著設計好的路徑移動與 控制粒子局部濃度。 另一種方式是建立一套整合即時樣品影像之顯示、使用者輸入資訊之接收與捕捉光點之 控制的圖形式使用者介面。使用者只需在樣品即時影像上,以滑鼠游標指定捕捉點位置, 即可輕鬆地捕捉、搬運與旋轉粒子。讓一般不具備相關知識的人也可以輕鬆容易地使用 HOTs 操控粒子
ii
A study of 3-dimensional manipulation of microparticles
by using holographic optical tweezers
Student: Sheng-Yang Tseng
Advisors: Dr. Long Hsu
Institute of Electrophysics
National Chiao Tung University
Abstract
Holographic optical tweezers (HOTs) use a spatial light modulator (SLM) to control properties of a light field in optical tweezers. By displaying a hologram on the SLM, many particles can be manipulated at the same time. However, the operation of HOTs requires knowledge of different fields, such as Fourier optics, algorithms of computer-generated holograms, programming languages and numerical methods. Only the people who have all the knowledge can use HOTs as a tool for their own research. This limits the application of HOTs in other fields. This thesis thus developed two different approaches to expand the ability of HOTs in manipulating particles.
One is developing a method of controlling the transverse momentum (TM) by displaying a hologram only in an azimuth region that centers at 0 and has a range of Δ of a spatial light
modulator in HOTs. Ray optics is utilized to analyze the TM of the resultant field, revealing that the direction of the TM is determined by the center angle of the azimuth region and that the magnitude of the TM is proportional to sin (Δ/2), without regarding the intensity. By using this method, particles can move automatically along a designed path in the field without applying any external forces or changing holograms.
The other is developing a graphic user interface that integrates the functions of displaying live sample image, receiving user input and computing required holograms in one program. Users simply use a mouse to click or drag on the live sample image to manipulate particles. People who do not have any related knowledge can use HOTs to manipulate particles easily.
iii
誌 謝
全像光學鑷夾是我在碩士班時就已經開始架設的系統。在架設系統的初期,因為實驗室 缺乏經費,許多能自己做的部分都自己做,包括所需要的顯微鏡的機身、部分的光學鏡 座、電子電路與控制系統所需要的程式。這一條路走來比我當初的預期還遠、還繞、還 孤單、還漫長,很感謝在這一路上所遇到的好人們,讓我能順利走完這條路。 感謝徐琅老師多年的指導與包容,給我機會與空間,讓我獨力完成我的研究。感謝我的 難兄難弟愛堂一路上的相挺。感謝實驗室的同志們,佳翰學長、豐榮、頌揚、瀚平、志 賢、軒豪、文宏、蜥蜴與丞恩,感謝你們的幫助與所帶給我的歡樂。也感謝已經畢業的 學長姐學弟妹們的鼓勵與應援,禾千學長、博睿學長、宜仁學長、博真學姐、益志學長、 玉堂、家傑、怡君,讓你們久等了。 感謝翠壁岩的師父、師伯與師兄們的加持,讓我能順利完成博士論文。謝謝我的弟弟, 因為你說的話,總是讓我的生活充滿樂趣。感謝每天送我上學的爸爸,美麗、可愛、不 太苗條的媽媽,感謝你們一路上的支持、鼓勵與包容。很抱歉你兒子書念這麼久。 最後,感謝佛祖、菩薩們的保佑,讓我有智慧與毅力走完這條不太好走的路。iv
目錄
中文摘要 ... i 英文摘要 ... ii 誌 謝 ... iii 目錄 ... iv 圖目錄 ... vi 第一章 緒論 ... 1 第二章 原理 ... 3 2-1 光對粒子的作用力 ... 3 2-2 全像光學鑷夾原理 ... 4 2-3 光強度控制原理 ... 6 2-3-1 常用的相位分佈函數 ... 7 2-3-2 光強度分布控制演算法 ... 8 2-3-3 光柵與透鏡法演算法 ... 10 2-3-4 廣義適應加法與加權 Gerchberg-Saxton 演算法 ... 10 第三章 光場橫向動量控制 ... 12 3-1 光漩渦中光子所帶軌道角動量之起源 ... 12 3-1-1 光漩渦的產生 ... 13 3-1-2 光漩渦的性質 ... 13 3-1-3 光柵近似法與光束追跡 ... 15 3-2 橫向動量分布的幾何光學描述與控制 ... 17 3-2-1 橫向動量分布的幾何光學描述 ... 17 3-2-2 實驗架設 ... 20 3-2-3 實驗結果 ... 20v 4-1 以往的系統操作方式 ... 25 4-2 介面程式的特點 ... 26 4-3 介面程式的考量與架構 ... 27 4-4 介面程式的外觀 ... 29 4-5 介面程式的操作說明 ... 31 4-6 介面程式的功能展示 ... 32 4-7 介面程式規格 ... 37 第五章 結論與展望 ... 38 5-1 結論 ... 38 5-2 展望 ... 38 5-2-1 光場橫向動量控制 ... 38 5-2-2 使用者介面 ... 39 著作目錄 ... 40 符號說明 ... 42 參考文獻 ... 43 附錄一 ... 49 附錄二 ... 64
vi
圖目錄
圖 1HOTS架設示意圖。 ... 4 圖 2GERCHBERG-SAXTON演算法流程圖。 ... 7 圖 3 直接搜尋演算法流程圖。 ... 8 圖 4 隨機光罩演算法流程圖。 ... 10 圖 5 光漩渦的產生方式示意圖 ... 13 圖 6SLM 平面與焦平面上光場強度與相位分布。 ... 14 圖 7 不同下,對 L 的關係圖與對 L 的關係圖。 ... 15 圖 8 產生 OV 的相位圖樣與的光柵相位圖樣對入射光作用之比較。 ... 16 圖 9 在 L>0 的 OV 中,光線從 SLM 平面到焦平面的路徑圖 ... 17 圖 10 垂直入射光線在 HOTS中的傳播路徑... 18 圖 11 實驗架設 ... 20 圖 12 粒子在兩個具相反方向之橫向動量的捕捉陣列中移動。 ... 21 圖 13 在不同與PTOTAL下,粒子捕捉點陣列中Y方向平均移動速率。 ... 22 圖 14粒子在一心型路徑的捕捉陣列中移動。 ... 23 圖 15利用具有橫向動量的捕捉陣列清空粒子。 ... 24 圖 16 介面程式發展前系統操作流程圖。 ... 26 圖 17 介面程式發展後系統操作流程圖。 ... 26 圖 18利用 GPU 計算相位圖樣相對於利用 CPU 計算相位圖樣的加速。 ... 27 圖 19 介面程式的外觀。 ... 29 圖 20 介面程式的控制按鈕。 ... 30 圖 21介面程式群組操作,Y軸旋轉連續圖。 ... 33 圖 22介面程式群組操作,Z軸旋轉連續圖。 ... 34 圖 23介面程式群組操作,捕捉點間距等比例縮小連續圖。 ... 351
第一章 緒論
第一章
緒論
在 1970 年代,Ashkin 等人,首次利用了雷射光的光壓操控微小粒子[1],並在 1987 年 時,更進一步提出了利用一道高度聚焦的雷射光點捕捉、搬運微米大小的粒子[2],此即 目前大家所知的光學鑷夾(optical tweezers)或是雷射鑷夾(laser tweezers)。由於光學鑷夾 利用光場操控粒子,因此具有非侵入性、非接觸性,而且波長在紅外光範圍內的光場幾乎 不會對生物物體產生傷害,因此被廣泛的應用在生物的研究上[3-7],例如細胞、細菌的 般運捕捉,或是生物力的量測[8]。 生物的研究需要從大量的實驗數據中得到平均的結果,因此需要處理大量的生物樣品。 在面對大量的生物樣品時,傳統光學鑷夾的單一捕捉點的操控能力就略顯不足。近十年 來,由於液晶顯示器的進步,有些研究者將液晶顯示器用於光學鑷夾中,調變雷射光的 相位分布,進而控制雷射光經過物鏡聚焦後的光強度分布。在 1999 年時 Reicherter 等人 首先提出了利用液晶顯示器顯示電腦全像片來改變光學鑷夾中的雷射光強度分佈[9]。他 們利用一液晶顯示器調變雷射光的相位分布後,經由顯微物鏡聚焦,在物鏡的焦平面上 產生多個亮環。藉由改變輸入液晶顯示器的相位圖樣,亮環在焦平面上的位置與亮環半 徑可以獨立動態地改變。在 2000 年時,他們利用同一系統,但改變輸入液晶顯示器的 相位圖樣,將原本只能在焦平面上操控微粒子的光學鑷夾,擴展成三維空間的操控[10]。 到了 2002 年時 Curtis[11]等人提出了動態全像光學鑷夾(holographic optical tweezers HOTs)。在論文中他們提出了比上述論文更一般且更有系統的方法。他們利用電腦全像 的演算法,計算所需的相位圖樣,控制光學鑷夾中的雷射光強度分布,並且也提出了一 些 HOTs 系統架設的準則。此方法不僅能動態產生多個捕捉點,並且每一個捕捉點的位 置與光強度分布皆可獨立控制,還能產生一些特殊的雷射模態,例如 Bessel beam 與光 漩渦(Optical vortex OV)等,大大地擴展光學鑷夾的功能與應用[11-15]。
雖然 HOTs 對光場控制有相當大的彈性,但計算所需的相位圖樣需要一些特別的演算法 以及龐大的電腦數值運算,因此在 Curtis 提出 HOTs 之後,有其他的研究者利用不同的 原理或架設降低所需要的電腦運算,以達成即時互動式地操控微粒子。有些研究者利用 廣義相位對比(generalized phase contrast GPC)[16-18]的方法,將液晶螢幕上(或光調變器) 的相位分布轉換成強度分布。或是採取 Fresnel 繞射的架設[19],以成像的方式,將捕捉 點聚焦到顯微鏡下捕捉粒子,讓移動捕捉點時不需重新計算相位圖樣。但這些的方法都 有其極限,且控制光場的彈性也較 HOTs 少,所以大多數的研究者仍採用 HOTs 進行各 自的研究[13-15, 20-22]。 由於利用 HOTs 操控粒子需要牽涉到相關的理論、演算法且需要龐大的數值計算,因此 限制了 HOTs 的功能與應用。在本論文中我們發展了兩種方式來達成擴展 HOTs 操控微 粒子運動的能力。一種是控制光場橫向動量(散射力),利用光場橫向動量的傳遞與梯度
2 力的捕捉力,在固定的相位圖樣下,讓粒子自行沿著設定的路徑移動,完全不需要使用 者介入操控。另一種方式是建立一套整合即時樣品影像之顯示、使用者輸入資訊之接收 與捕捉光點之控制的圖形式使用者介面。使用者可以透過介面程式輕鬆地操控粒子。 在控制光場橫向動量部分。傳統的光學鑷夾中,光子動量傳遞所造成的散射力會抵消部 份光軸方向的梯度力造成捕捉效率下降,因此一直被視為不想要的力。但在一些帶有軌 道角動量(orbital angular momentum OAM)的特殊雷射模態中,如 Bessel 模態[23]、 Laguerre-Gaussian 模態[24]或是光漩渦(optical vortices OV)[25-27]等,被捕捉的粒子會因 為獲得光場中的 OAM 而開始移動且無需任何外力,而這些 OAM 可被視為光場的橫向 動量或橫向散射力[28, 29],因此開啟了利用 HOTs 控制光場的橫向散射力推動粒子的研 究[30-34]。本論文從幾何光學的角度,研究 OV 軌道角動量的起源,並發展了一套控制 光場橫向動量的方法,讓粒子在固定相位圖樣所產生的光場分布下,自行沿著設計好的 路徑移動。 雖然控制光場的橫向動量分布可以在不改變相位圖樣下移動微粒子,但粒子移動的路徑 仍然是固定的。當面對突發狀況時,或是只是想隨意操控微粒子時,這種固定式的粒子 操控就會顯得不足。此外,由於 HOTs 的控制牽涉到許多理論、演算法與數值計算,其 操控粒子所需的知識對其他領域的研究者可能是難以掌握的,因此我們發展了一套整合 即時樣品影像之顯示、使用者輸入資訊之接收與捕捉光點之控制的圖形式 HOTs 使用者 介面。讓使用者只需利用滑鼠在樣品的即時影像上點選即可輕鬆地捕捉、搬運與旋轉粒 子。對於非相關領域的人員,在經過簡單的解說介面程式功能後就能輕鬆容易地使用 HOTs 同時操控多個微粒子。 本論文的安排如下:第二章中,我們將從光場性質(強度與相位)與光場對粒子作用力間的 關係為起點,說明如何藉由控制光場操控粒子。在此全像光學鑷夾的架構、原理與常用 的演算法也會在這章中作說明。第三章是光場橫向動量控制。在這章中我們從研究光漩 渦中光子所帶軌道角動量的起源開始,藉由觀察產生光漩渦的相位圖樣與光漩渦之間的 光強度對應關係,推論光漩渦中光子所帶軌道角動量的起源,並且以此推論結果為基礎, 以幾何光學的角度分析 HOTs 中光場橫向動量的分布,並進而發展出一套控制光場橫向 動量的演算方法。第四章是在方便使用者利用 HOTs 操控粒子的考量下,說明 HOTs 使 用者介面的設計與考量,並且展示 HOTs 介面程式操控粒子的功能。第五章則是對本論 文所做的研究作個總結並且介紹 HOTs 未來可能應用的方向。
3 第二章 原理
第二章
原理
在這一章中,我們將對本論文中所使用的理論作一介紹,其中包括光場對粒子的作用力 與全像光學鑷夾的基本架設與操作原理。我們將從光場作用力與光場性質(相位與強度 分布)的關係開始,說明如何藉由改變光場性質操控微粒子,並介紹全像光學鑷夾的操 作原理以及常用的相位圖樣演算法。2-1 光對粒子的作用力
光場對粒子作用力的描述跟計算與粒子的大小有關。當粒子的直徑甚大於光的波長時, 光對粒子的捕捉力分析可以用幾何光學模型描述[35]。在這模型中,光是由光線所組成, 當光線從環境入射到粒子中時,由於介質折射率的改變,光線會在粒子與環境的界面上 進行多次的反射與折射。這些反射與折射造成光線中光子的動量改變。此動量的時變率 是粒子對光線的作用力,而其反作用力即為光線對粒子的作用力。根據作用力的方向與 入射光線的夾角做區分,光對粒子的作用力可分為梯度力(Gradient force)與散射力 (Scattering force)。 梯度力的方向與光線垂直。對於折射率比周圍環境大的粒子,梯度力會將其中心吸引到 光線的位置,而對於折射率比周圍環境小的粒子,梯度力則會將其推離光線。散射力的 方向與光線同向。不論粒子的折射率是比周圍環境大或是小,散射力都會將粒子沿著光 線前進方向推動。 另一方面,當粒子的直徑甚小於光學鑷夾所使用的雷射光波長時,光學鑷夾對粒子的作 用力亦可分為梯度力與散射力[2, 36],但此時的梯度力與散射力的來源與幾何光學模型 的描述不同。此梯度力的來源是粒子在光場下所產生的感應電偶極在光場中所受到的力, 而散射力的來源則是光壓。根據文獻[36]的推導,光場對一個均質(Homogeneous)、等 向(Isotropic)、半徑為 a 的介電粒子所施加的梯度力 Fg為 I ) m m ( c a ns 2 1 2 2 2 3 2 g F , (2-1) 其中 np是介電粒子的折射率,ns是介電粒子周圍介質的折射率,m=np/ns, c 為真空中 的光速,I 為光場強度分布(intensity)。我們可以注意到(2-1)式中光場的梯度力正比於光 強度 I 的梯度,此即梯度力名稱的由來。光對粒子的散射力 Fs則為 t s m m c n a ka S Fs 2 2 4 ) 2 1 ( ) ( 3 8 , (2-2) 其中,k=/,為光的波長,且<S>t為光場 Poynting 向量的時間平均量。Poynting 向4 量代表光場在單位時間下能量傳遞的方向與大小,即光前進的方向,也代表光場動量方 向。從(2-2)式中我們可以看出散射力的方向是與光傳播方向一致。 對於大小介於上述兩者之間的粒子,光對粒子的作用力大多是以數值的方式求得捕捉力 的大小。但不論粒子的大小為何,光對粒子的作用力都可簡單分為梯度力與散射力。同 樣地,梯度力會根據粒子的折射率,將粒子集中或推離光強度最強的區域,而散射力則 會將粒子沿著光傳播方向(或動量方向)推進,因此藉由控制光場的強度與動量分布可以 控制粒子的運動,而光學鑷夾[2]即是利用顯微物鏡將雷射光聚焦產生一亮點,並藉由亮 點對粒子的梯度力來捕捉微粒子。 傳統的光學鑷夾只能產生單一亮點,同時也無法控制雷射光在物鏡焦平面上的動量分布, 所以無法同時操控多個粒子。為突破此一限制,一些研究者利用空間光調變器(spatial light modulator SLM) 控制光學鑷夾中的光場分布,進而發展了全像光學鑷夾系統 (holographic optical tweezers HOTs)[10, 11, 19, 24]。在接下來的章節中,我們將推導 SLM 複數穿透函數(complex transmittance)與物鏡焦平面上光場分布與橫向動量的關係,並且 介紹控制光場分布所使用的演算法。
2-2 全像光學鑷夾原理
HOTs 是一套利用電腦全像技術[37]控制光學鑷夾捕捉光場的系統。藉由將電腦所計算 的全像片或相位圖樣顯示於 SLM 上,調變光學鑷夾捕捉雷射的相位分布,產生所需的 光場分布。通常顯示在 SLM 上的相位圖樣的最後會成像在顯微物鏡的後焦平面上,而 所需的光場分布則是在物鏡的前焦平面上產生,因此 HOTs 的架設可以簡化成圖 1。 圖 1 HOTs 架設示意圖。 在推導 SLM 穿透函數 t(x,y)與焦平面光場分布之間的關係時,我們採用 Haus[38]所提出 的方法,從光場的向量位(vector potential)著手計算電場分布。使用此方法主要的好處是 可以得到光場橫向動量與向量位之間的關係,並且可以找到控制光場橫向動量分布的方 法。我們假設入射光場是沿著 z 方向傳播,且光場的向量位 A(x,y,z)是沿著 x 方向並且5 第二章 原理 x A(x,y,z,t) A(x,y,z)eit , (2-3) 其中為角頻率,而 x 為 x 方向的單位向量。在 Lorenz gauge 與近軸近似下,在一個無 源(source free)、均質(homogeneous)、等向(isotropic)的環境中,A(x,y,z)會滿足純量波動 方程式, 0 ) , , ( ) , , ( 2 2 A x y z k A x y z , (2-4) 其中,k=/,為光在介質中的波長。此純量波動方程式與電場所遵守的波動方程式 相同,因此富氏光學[37]中所推導的結果都可適用於向量位。在之後的討論中,我們所 提到的光場分布即是指光場向量位的複數振幅(complex amplitude)。 假設 SLM 的複數穿透函數為 t(x,y)且入射光向量位在 SLM 上的光場分布為 u(x,y)in,則
剛離開 SLM 平面的光場分布 u(x,y)SLM=u(x,y)int(x,y)。從富氏光學中[37, 38]可以知道,焦
平面上的光場分布 u(u,v)f為 dxdy e y x t y x u f i v u u vy ux f i in obj f obj ) ( 2 ) , ( ) , ( 1 ) , (
o b j y o b j x f v f f u f in obj y x t y x u F f i ; )} , ( ) , ( { 1 , (2-5) 其中n 為介質中光波長,n 為介質直射率,fobj為物鏡焦距, {}F 代表富氏轉換,而 fx與 fy分別為富氏轉換後 x 方向與 y 方向的空間頻率。從(2-5)式中我們可以看出 u(u,v)SLM 與 u(u,v)f的關係是一個簡單了富氏轉換。我們假設入射光場為振幅為 1 的垂直入射平面 波,因此(2-5)即可簡化為 o b j y o b j x f v f f u f obj f F t x y f i y x u ; )} , ( { 1 ) , ( , (2-6)如果所需的 u(u,v)f為已知,則 SLM 所需產生的穿透函數即為將 u(u,v)f反富氏轉換(inverse
Fourier transform),因此只要適當的調整 t(x,y),即可在物鏡焦平面上產生所需的 u(u,v)f。
當 u(u,v)f知道後,光場動量分布的時間均量<Pem(x,y)>可以由下式得到[24, 29, 38, 39] z P * * | ( , ) |2 2 1 ] ) , ( ) , ( ) , ( ) , ( [ 4 ) , ( f t f f t f f em u v i u u v u u v u u v u u v k u u v , (2-7)
6 其中,為環境介電常數, y x t x y ,而 z 為 z 方向的單位向量。
假設 u(u,v)f=R(u,v)ei(u,v),R(u,v)與(u,v)為實數函數,則物鏡焦平面上的橫向動量分布即
為 ) , ( ) , ( 2 ) , (u v t R u v 2 t u v em P ) , ( ) , ( 2 I u v t u v , (2-8) 其中 I(u,v)=R(u,v)2為光場的強度分布。 (2-8)式說明光場的橫向動量正比於光場的相位 梯度與強度分布,因此要控制光場對粒子所施加的散射力分布需要控制光場的相位與強 度分布。
2-3 光強度控制原理
從 2-1 節中我們知道光場的梯度力正比於光場強度的梯度,因此控制光場的強度分布即 可控制光場對粒子的梯度粒。從(2-6)式中我們知道 SLM 上的光場分布 u(u,v)SLM與焦平 面上的光場分布 u(u,v)f的關係是富氏轉換。只要透過把焦平面上光場反富氏轉換即可得 到 SLM 所需的穿透函數 t(x,y)。但是通常 HOTs 所使用的 SLM 只能調變入射光場的相 位分佈,不能調變強度分佈,因此 SLM 便無法產生任意 u(u,v)f所需要的 t(x,y)。由於梯 度力只與光強度分布有關,我們可以改變焦平面上光場中的相位分布,但保留所需強度 分布,直到所得到的 t(x,y)是 SLM 可以產生的。此種有系統地尋找相位分布以產生所需 的光強度分布的方法是由 Gerchberg 及 Saxton 提出的(Gerchberg-Saxton GS)演算法[40]。 演算法的流程圖如圖 2 所示。計算所需的相位分佈所花的時間,有很大的部分是決定於一開始時所猜測的相位分佈inl。如果猜得好,時間就可以大大縮短。為加快演算法的收
斂,我們選用所需光場分佈 u(u,v)f的反富氏轉換後的相位分佈,來作為一開始所輸入的
inl。在演算法一開始時, 我們將相位分佈inl 的穿透函數乘上入射光場分佈(通常我們
假設入射光場的相位為零,振幅分布為常數),如此即可得到 SLM 上光場分布 u(x,y)SLM。
將 u(x,y)SLM用快速富氏轉換(fast Fourier transform FFT)即可得到光場在 u-v 平面(焦平面)
上的空間分佈 un(u,v)f。在此我們檢查 un(u,v)f的振幅分佈 an(u,v)f與所需的光場振幅分佈
a(u,v)f是否相同或是接近(即光場強度分佈是否與所需的接近)。如果 an(u,v)f接近 a(u,v)f,
則輸入的相位空間分佈inl 即是我們所需要的。如果不是,我們將 un(u,v)f 的振幅分佈
an(u,v)f 換成所需的振幅空間分佈 a(u,v)f,再用快速反富氏轉換(inverse fast Fourier
transform iFFT)回到 x-y 平面上。接著我們將所得到的光場分佈的振幅部分再換回入射光
場的振幅 a(x,y)in分佈,再進入下個迴圈中。如此重複上述步驟直到得到所需的輸入相位
7 第二章 原理 圖 2 Gerchberg-Saxton 演算法流程圖。 2-3-1 常用的相位分佈函數 在這一小節中我們將介紹幾個可以簡單地改變光場分佈的相位函數。利用這些相位分布 函數,我們可以將光場做空間三維的移動或將捕捉點轉換成線形或環形的光場強度分佈 [10, 11]。 將雷射光點做三維移動可以由輸入(2-9)式達成, ) ( 2 2 x2 y2 f πz i ) f vy f ux π( i obj obj obj e e t(x,y) , (2-9) 式中(u,v,z)為光點距離物鏡焦點的距離,fobj為物鏡的焦距,而為光波波長。 如果要產生一線段的光強度分佈,則可以模仿一柱形透鏡的穿透函數來達成,如下所示 2 ) , x f π i cl e y t(x , (2-10) 其中 fcl為柱形透鏡的焦距,為光波波長。 如果要產生一環狀的光強度分佈光場所需的相位分佈函數為 iLθ e y x t( , ) , (2-11) 其中 L 的大小決定此環狀的半徑大小,而為 SLM 平面的方向角。此一函數所產生的亮 環即是光漩渦。光漩渦除了環形光強度分布外,在此亮環上具有橫向動量分布,能對粒 子施加散射力,可以將被捕捉的粒子沿著亮環推動。在第三章中,我們將會對於 OV 有 更詳細的說明。
8 2-3-2 光強度分布控制演算法 2-3-2-1 直接搜尋演算法[41-43] 直接搜尋(Direct search)演算法則是將 SLM 或液晶螢幕上的每一個畫素都詴著改變該畫 素中的相位延遲的大小,如果改變後的相位延遲的大小ijn 會使得焦平面上的光強度分 布 If更接近所需要的光強度分布 Id,則該畫素的相位延遲ij及更新為ijn。如果改變後的 ijn沒有使得 If更接近 Id,則ij就維持原來的值。圖 3 為直接搜尋演算法的流程圖。 圖 3 直接搜尋演算法流程圖。 這種演算法的好處是所算出的相位分布可以產生相當接近所需的光強度分布。壞處是計 算時間太長,通常 192 X 192 個點,Pentium D 2.66 GHz 的電腦計算,所需要的時間大 約是 30 分鐘左右。 2-3-2-2 空間切割演算[44, 45] 在許多的狀況下,如果用前述幾種方式尋找產生多捕捉光點所需輸入的相位分佈需要花 費相當多的時間。而利用分割 SLM 區域的方式再配合上(2-9)式中移動光點的方法,則 可以直接產生多捕捉光點。假設我們今天要產生四個光點,最快的方式就是將 SLM 分 成 4 個區域。在每一個區域中輸入(2-9)式所示的相位分佈函數,分別將光點推到不同的 位置上。如此一來即產生 4 個光點。一個分成 4 個區域的 t(x,y)可以寫成(2w 為 SLM 的有效區域的邊長)
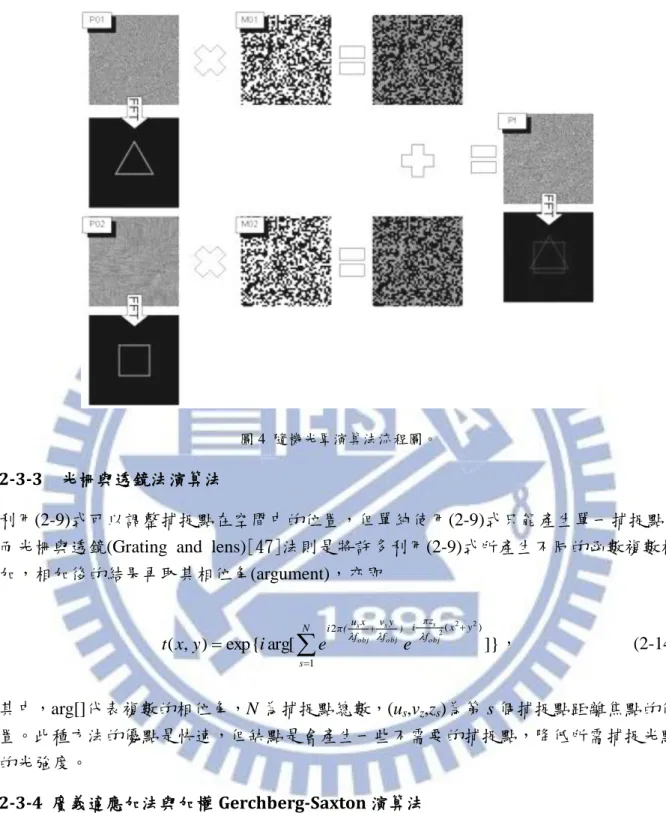
9 第二章 原理 ) w ,x w δ(x ) e w y ct( ) w x ct( ) w ,x w δ(x ) e w y ct( ) w x ct( ) w ,x w δ(x ) e w y ct( ) w x ct( ) w ,x w δ(x ) e w y ct( ) w x ct( y x t y v x u i y v x u i y v x u i y v x u i 2 2 ] Re [Re 2 2 ] Re [Re 2 2 ] Re [Re 2 2 ] Re [Re ) , ( 4 4 3 3 2 2 1 1 ( 2 ( 2 ( 2 ( 2 , (2-12) 而上式經過富氏轉換後就變成 )} ,v-v δ(u-u ] inc(wv)e [Sinc(wu)S ) ,v-v δ(u-u ] inc(wv)e [Sinc(wu)S ) ,v-v δ(u-u ] inc(wv)e [Sinc(wu)S ) ,v-v δ(u-u ] Sinc(wv)e {[Sinc(wu) |w| v u u vw uw i vw uw i vw uw i vw uw i f 4 4 ) ( 3 3 ) ( 2 2 ) ( 1 1 ) ( 2 ) , ( , (2-13) 如果式中的(u1,v1), (u2,v2), (u3,v3), (u4,v4)為不同的位置,(2-13)式即表示 4 個在不同位置的 光點。用此種方法產生的光點數量有限制,因為當分割的區域面積越來越小時,富氏轉 換後所產生的光點大小就越來越大。當光點大到某一程度時,光場強度的梯度變化就不 足以捕捉微粒子。所以以此種方法只能產生有限數量的光點。光點的數量取決於入射光 能量以及 SLM 的有效面積。能量越強,SLM 的面積越大,所可以產生的光點數目越多。 2-3-2-3 隨機光罩演算法 隨機光罩(Random mask) [46]演算法與空間切割演算法的概念差不多,都是利用空間分 割的方式產生多個捕捉光點。隨機光罩演算法特別的地方是空間上的分割是隨機離散的 分布。 假設如果要產生兩個分別在位置 P1、P2的捕捉點,首先分別計算在 P1上產生捕捉點與 在 P2 上產生捕捉點的兩個相位圖樣,P01、P02。接著再產生兩個穿透率隨空間隨機分 布的光罩,M01、M02。這兩個光罩的穿透率的值只有 0 跟 1,而且當其中一個光罩的 某一點是 1,另一個光罩相同位置上則是 0。最後分別將兩個先前產生的相位圖樣分別 乘 上 兩 個 隨 機 光 罩 後 再 相 加 即 可 得 到 產 生 兩 個 捕 捉 點 的 相 位 圖 樣 , 即 P01×M01+P02×M02。圖 4 即為 Randdom Mask 演算法的計算流程圖。
10
圖 4 隨機光罩演算法流程圖。
2-3-3 光柵與透鏡法演算法
利用(2-9)式可以調整捕捉點在空間中的位置,但單純使用(2-9)式只能產生單一捕捉點, 而光柵與透鏡(Grating and lens)[47]法則是將許多利用(2-9)式所產生不同的函數複數相 加,相加後的結果再取其相位角(argument),亦即 ]} arg[ exp{ ) , ( 1 ) ( 2 2 2 2
N s y x f πz i ) f y v f x u π( i o b j s o b j s o b j s e e i y x t , (2-14) 其中,arg[]代表複數的相位角,N 為捕捉點總數,(us,vz,zs)為第 s 個捕捉點距離焦點的位 置。此種方法的優點是快速,但缺點是會產生一些不需要的捕捉點,降低所需捕捉光點 的光強度。 2-3-4 廣義適應加法與加權 Gerchberg-Saxton 演算法 一些研究者以光柵與透鏡法為基礎率,利用不同的疊代法,增加相位圖樣控制捕捉光點 的效率。廣義適應加法(generalized adaptive add GAA)[11]與加權 Gerchberg-Saxton 法 (weighted GS GSW)[48]的基礎都是從(2-15)式開始,在每個疊代回圈中,修正在每個捕 捉點函數前的係數 ]} arg[ exp{ ) , ( 1 ) ( 2 2 2 2
tp o b j s o b j s o b j s N s y x f πz i ) f y v f x u π( i ii s ii i c e e y x t , (2-15)11 第二章 原理 其中 ii 代表迴圈數,t(x,y)ii為第 ii 個迴圈中的相位函數,Ntp為捕捉點的總數,c 為第sii ii 個迴圈下第 s 個捕捉點的複數振幅。 在廣義適應加法中,開始時 is s e c0 ,s為隨機產生的相位角,而且 pxl y x y x f πz i ) f y v f x u π( i ii ii s t x y e e N o b j s o b j s o b j s / ) , ( , ) ( 2 2 2 2
, (2-16) 其中 Npxl為相位圖樣的取樣總數(或像素總數),且 | | ] | | | | ) 1 [( 0 1 ii s ii s ii s s ii s c c , (2-17) 其中為一常數,在~下可以得到不錯的效率。 在加權 GS 法中,會在引進另一個變數 ii s w 以加強捕捉點間的強度均勻度。在此方法中 | | / sii ii s ii s ii s w c , w0s 1, is s e 0 , s為隨機產生的相位角,且 pxl y x y x f πz i ) f y v f x u π( i ii ii s t x y e e N obj s obj s obj s / ) , ( , ) ( 2 2 2 2
, (2-18) 與 | | | | 1 ii s ii s ii s ii s w w , (2-19) 其中|sii|是所有捕捉點在第 ii 個迴圈中的 ii s 平均值。此方法的優點是可以產生強度非常均勻的捕捉點陣列,但缺點是在以電腦顯示卡(graphic processing unit GPU)運算相位 圖樣時,速度會較廣義適應加法稍慢一些。
12
第三章
光場橫向動量控制
由於梯度力只能將粒子捕捉在光場最亮的地方,如果只靠梯度力移動粒子時,就需要改 變顯示在 SLM 上的相位圖樣,將光場中最亮的部分漸漸地移動到指定的位置,因此使 用者就必頇介入,重新計算所需更換的相位圖樣。 但在一些特別的雷射模態中,如 Bessel 模態[23]、Laguerre-Gaussian 模態[24]或是光漩 渦(optical vortices OV)[25-27]等,被捕捉的粒子會自動地在光場中移動而無需任何外力。 在 HOTs 發展的初期,大多數的研究者都認為粒子在光場中移動的原因是由於這些雷射 模態中的光子帶有軌道角動量(orbital angular momentum OAM),當粒子散射了或吸收了 這些光子後,粒子即獲得了 OAM 而開始移動。近年來,有些研究者認為這些光子所帶 的 OAM 可視為光場的橫向動量或橫向散射力[28, 29],因此開啟了利用 HOTs 控制光場 的橫向散射力推動粒子的研究[30-34]。 由於散射力會沿著光場橫向動量方向推動粒子,對於被捕捉在光場最亮部分的粒子能提 供額外的驅動力。因此藉由控制光場橫向動量分布,並同時降低沿光場橫向動量方向上 的梯度力,可以達成利用單一相位圖樣所產生的光場移動粒子,而完全不需使用者的介 入操作。 從 2-2 節的討論,我們知道要控制光場的橫向動量分布需要控制光場的相位與強度分布, 而焦平面上光場的相位與強度分布一旦決定,SLM 平面上的相位與強度分布也就唯一 確定。但在 HOTs 中所使用的 SLM 只能調變入射光場的相位分布,因此需要一些特別 的方法利用全相位 SLM 調變入射光場的強度分布。Roichman 與 Grier 提出形狀相位演 算法(shape-phase algorithm) [32],此方法是犧牲 SLM 的解析度而達到調變入射光場強度 分布,達成控制光場橫向動量分布的目的。Jesacher 等人則提出在原本 HOTs 系統的相 位圖樣前再用一張相位圖樣來控制入射光的強度分布[33]。不同於前述的方法。在這章裡,我們從探討光漩渦(optical vortices OV) 推動粒子能力的 起源,以幾何光學的觀點,發展一套控制光場橫向動量分布的方法。我們從產生 OV 所 需相位圖樣與 OV 間的強度對應關係,推論 OV 推動粒子能力的起源為斜向入射光,並 以這個觀念為基礎,利用幾何光學描述 HOTs 中光場中橫向動量的分布,建立一套控制 光場橫向動量分布(即橫向散射力分布)的方法。並展示粒子可以在無任何外加外力與不 變更相位圖樣的情況下,在光場中自動沿著設定好的路線移動。
3-1
光漩渦中光子所帶軌道角動量之起源
光漩渦(Optical Vortex OV) 是一種特殊的光強度分布亮環,此亮環不僅會捕捉樣品,並 且被捕捉的樣品還會自動地沿著亮環移動。這種單純利用光對粒子的作用力而不需要其
13 第三章 光場橫向動量控制 他形式的外力即可推動微粒子的能力引起很多研究者的興趣,並提出許多應用[15, 49, 50]。 OV 中的粒子會移動是因為當雷射光束經過了 eiL的相位函數調變後,每一個光子即帶有
L 大小的軌道角動量(orbital angular momentum OAM)[24, 39, 51]。當被捕捉在 OV 內的 粒子吸收或反射了這些帶有 OAM 的光子後,樣品會獲得這些 OAM,而沿著 OV 移動。 但是我們發現當 eiL的相位函數被破壞後(即遮住部分方位角範圍內的相位圖樣),其所產 生的 OV 在相對應的方位角範圍內也會消失,並且剩餘部分的 OV 仍具有推動粒子能力。 此現象是原本 OAM 說法所無法解釋的。因此在這章中,我們從 SLM 平面與其所產生 的 OV 間的光強度對應關係,利用光柵的近似與光束追跡法,解釋 OV 中橫向動量的來 源。 3-1-1 光漩渦的產生
在 HOTs 中,OV 的產生可以藉由控制 SLM 使其穿透函數為 eiL,即可在 HOT 的樣品
空間(物鏡焦平面)產生一個 OV[10, 11]。其作法如圖 5 所示,一道雷射光束經過一個能 產生穿透函數為 eiL的 SLM 調變後,經過物鏡聚焦後即在物鏡的焦平面上產生 OV。 圖 5 光漩渦的產生方式示意圖 3-1-2 光漩渦的性質 在利用 HOTs 產生 OV 的過程中, SLM 上的光強度分布與焦平面上 OV 的光強度分布 存在一種幾何光學的對應關係[28, 52]。當 SLM 某方位角範圍內光被遮住時,其所產生 的 OV 在某一範圍的方位角也會消失。消失的方位角範圍大小與 SLM 上被遮住的區域 接近,並且存在著 90°或-90°的角度差。圖 6 是 SLM 平面上的相位分布與強度分布與其
14 在焦平面上所產生光場的相位與強度分布圖。圖 6 (a)與(b)是當 SLM 上方位角,在=-15 °到=15°(即=30°)範圍內的光被擋住時,在焦平面上所產生的 L 分別為 50 與-50 的 OV 之光場強度分布與相位分布。而圖 6 (c)與(d)則是當=60°的情況下,L 分別為 50 與-50 的 OV 的光場強度分布與相位分布。從圖中我們可以看到當 SLM 上的某一方位角 範圍內的光被擋掉後,OV 的某一方位角範圍內的光也消失了,並且擋掉部分 與消失部分的方位角範圍相當接近。此外焦平面上消失的區域,在 L的情況下會 相對於 SLM 上檔掉的區域旋轉 90°,而在 L的情況下會相對於 SLM 上檔掉的區域 旋轉-90°。 圖 6 SLM 平面與焦平面上光場強度與相位分布。 (a)為 L=50 與=30o。(b)為 L=-50 與= 30o。(c)為 L=50 與= 60o。(d)為 L=-50 與= 60o。
15 第三章 光場橫向動量控制 圖 7 不同下,對 L 的關係圖與對 L 的關係圖。 (a)在不同下,與 L 的關係圖,圖中實線部分表示的值而虛線部分是模擬的結果。(b) 在不同下,與 L 的關係圖。圖中 L 的的範圍是從-199 到 200。 這種性質不只存在在 L=±50 的 OV 中,在其他 L 的 OV 中也有此性質,如圖 7 所示。圖 7(a)是在不同下,與 L 的關係圖,圖中實線部分表示的值而虛線部分是模擬的結 果。而圖 7(b)則是在不同下,與 L 的關係圖,其中為 SLM 上擋住區域中央的 方位角度,則為焦平面上 OV 消失區域中央的方位角。圖中 L 的的範圍是從-199 到 200。 3-1-3 光柵近似法與光束追跡 由這些特別的對應關係讓我們聯想到光柵。光柵的穿透函數為 eik〃r,其中 k 為一個二維 向量,決定光柵的方向與周期,而 r 是 SLM 平面上的位置向量。eik〃r的相位是沿著 k 方向隨著距離的增加而增加,而 eiL的相位則是隨著方位角的增加而增加。如果我們仔 細的觀察產生 OV 的相位圖樣,我們可以發現產生 OV 的相位圖樣很像是一直隨著方位 角旋轉的光柵。由於在形式上這兩種穿透函數的相位都是隨著某一個空間座標中的值線 性增加,因此我們藉由已熟悉的光柵特性,解釋粒子在 OV 中旋轉的來源。 圖 8(a)是比較 eiL在 =180°附近的相位圖樣與 e-iky的相位圖樣。圖中的左側為光通過該 區域後,在焦平面上的光強度分布。從圖中我們可以發現這兩個相位圖樣對於光有類似 的效用,都是將光聚焦在縱軸的負半部上。而圖 8 (b)則是比較 eiL在 =0°附近的相位圖 樣與 eiky的相位圖樣。圖中的右側為光通過該區域後,在焦平面上的光強度分布。同樣 地,這兩個相位圖樣對於光也有相同的效用,都是將光聚焦在縱軸的正半部上,因此產 生 OV 的相位圖樣可以近似成一直隨著方位角旋轉的區域光柵。 L
16 圖 8 產生 OV 的相位圖樣與的光柵相位圖樣對入射光作用之比較。 圖 9 是當光線經過 L 為正值的穿透函數 eiL中 =0°附近的區域後,傳播到焦平面的路徑。 從前面的討論中我們可以知道,此部分的相位圖樣可以近似為 eiky。而當光線經過 eiky 的光柵後會向上偏折,所以通過 SLM 上=0°附近區域的光線也會向上偏折。在通過透 鏡後,這排光線會一直維持相同的水平高度,但在水平方向則匯聚到焦平面上 v 軸上的 A 點。由於這排光線是從透鏡平面上 x>0 的區域斜向入射到焦平面 A 點上,所以這些光 線的動量具有平行於焦平面的橫向分量。這些分量都沿著-u 方向,亦即 OV 在 A 點上切 線方向。藉由同樣的方法,我們可以知道入射在 SLM 其他方位角的光線所貢獻的橫向 動量都是沿著 OV 的切線方向。因此當 OV 中的粒子獲得光線中的橫向動量後就會沿著 OV 的亮環持續旋轉。 OV 中光的軌道角動量 J 定義為焦平面上位置向量與該位置上的橫向動量 Pt的外積, 即 t P ρ J 。 (3-1) A 點的是沿著 v 而 Pt是沿著-u,所以 A 點上 J 的方向是沿著正 z 方向。OV 上其他的 位置都可藉由同樣的方法分析,都會得到相同的結果。所以 L>0 的 OV 中的軌道角動量 是沿著正 z 方向。此方向與目前的理論所預測的方向是一樣的。而對於 L<0 的 OV,我 們可以用同樣的方法分析得到 L<0 的 OV 中的軌道角動量是沿著-z 的方向, 結合光柵近似法與光束追跡法的分析可以得知粒子在 OV 中持續旋轉的動力來自於光線 所貢獻的橫向動量。相較於軌道角動量的分析法,此種線動量分析法對 OV 推動粒子的 現象提供了一個比較簡單和直覺的解釋。在這個概念下,只要設法控制光線入射到焦平 面上的角度,即可提供粒子在焦平面上橫向移動的動力。在下一節中我們將利用此概念, 發展一套控制光場橫向動量分布的演算法。
17 第三章 光場橫向動量控制 圖 9 在 L>0 的 OV 中,光線從 SLM 平面到焦平面的路徑圖
3-2 橫向動量分布的幾何光學描述與控制
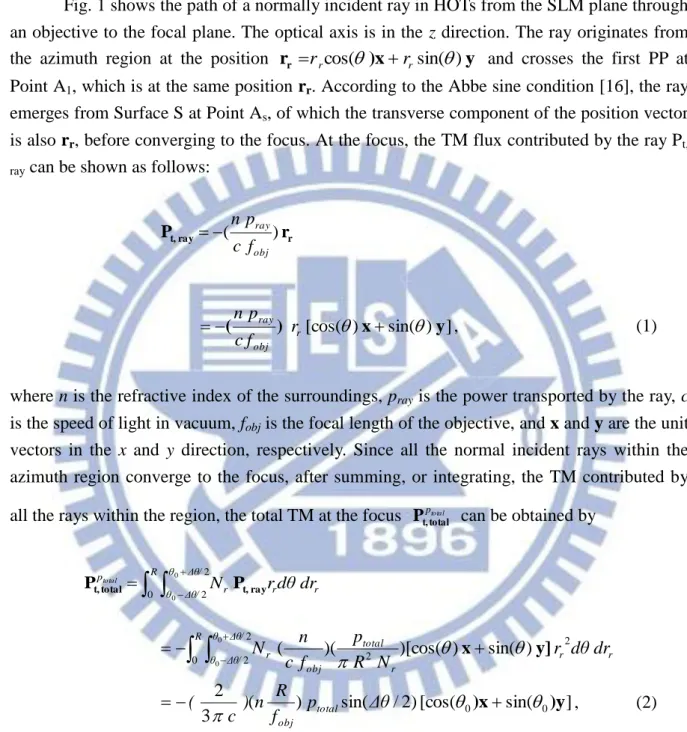
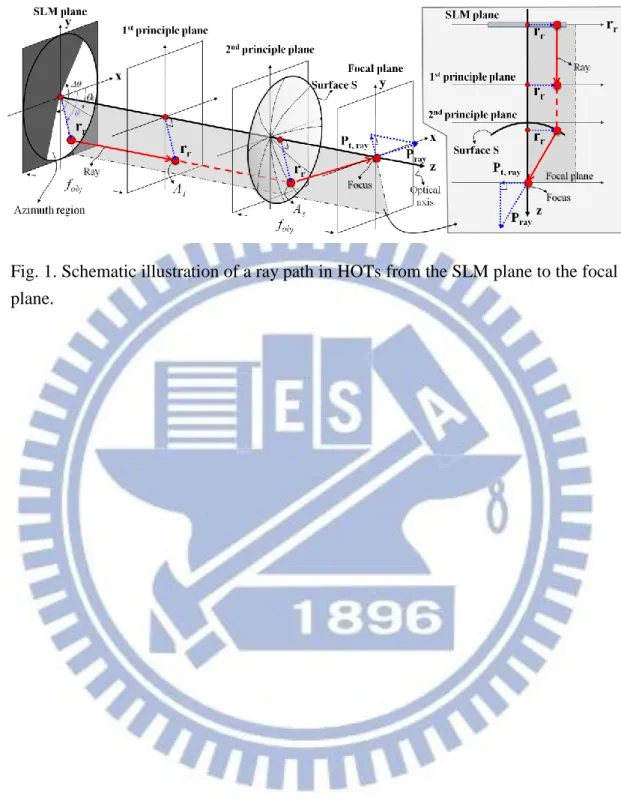
由於 OV 的強度分布局限在環狀,所以被捕捉的粒子的移動路徑有只有環形。因此在這 部分的研究中,我們的目標是希望能產生環狀以外且能夠移動被捕捉粒子的光場。 從對 OV 中光子所帶軌道角動量的研究中,我們發現被捕捉在 OV 中的粒子會移動的原 因是由斜向入射的光線所造成。斜向入射光線會在焦平面上貢獻動量分量,所以如果能 夠在焦平面上產生斜向入射光,即可產生具有橫向動量分布的光場。 在傳統的光學鑷夾中,入射光束被物鏡聚焦的過程中有許多的斜向入射的光線產生,但 由於入射光的強度分布是對稱於光軸,入射光線在焦點上所貢獻的橫向動量會被彼此抵 消。為了破壞入射光強度分布的軸向對稱性,我們將相位圖樣只顯示在 SLM 上某一方 位角區域內。在接下來的討論中,我們將利用幾何光學描述由該方位角區域內的相位圖 樣所產生光場中的橫向動量分布,並從所得到的結果找出控制光場橫向動量的方法。 3-2-1 橫向動量分布的幾何光學描述 在這一小節中我們將利用幾何光學分析 HOTs 中捕捉光場的橫向動量分布。在這裡我們 假設相位圖樣只顯示在 SLM 的某一方位角區域內,這個方位角區域的中心角度為0並 且範圍大小為Δ。我們假設入射光為一垂直入射、剛好填滿物鏡入曈且總功率為 ptotal 的 光線束。在考慮 SLM 相位圖樣的繞射效應之前,我們先分析所有入射光線在焦點上, 在單位時間內所,所貢獻的橫向動量大小,亦即橫向動量通量的大小。 在 HOTs 中,顯示在 SLM 上的相位圖樣會成像到物鏡的後焦平面上,而所需的捕捉光 場則是產生在物鏡的前焦平面上。因此整個 HOTs 可以簡化成物鏡的前後焦平面間的結 構。一般在 HOTs 中所使用的物鏡都是無限遠修正(infinite-corrected)的物鏡。這種物鏡 SLM plane18
滿足 Abbe 的正弦定理(Abbe sine condition),並且可以簡化成第一主平面(1st
PP),第二 主平面(2nd PP)與球面 S[53]。球面 S 的球心是在焦點上,並且相切於第二主平面。 圖 10 垂直入射光線在 HOTs 中的傳播路徑 圖 10 是一垂直入射的光線在 HOTs 中,從 SLM 到焦平面上的光線路徑。在此我們假設 光軸是沿著 z 方向並且光線從 SLM 上的位置rr rrcos()xrrsin() y發出。該光線交 第一主平面於 A1並且交球面 S 於 As點之後聚到焦點上。根據 Abbe 的正弦定理[53], A1與 As位置向量的橫向分量皆與 rr相同。因此該光線在焦點上所貢獻的橫向動量通量 Pt,ray為 r ray t, r P ( ) obj ray f c p n , ] ) sin( ) [cos( x y ) ( r obj ray r c f p n , (3-1) 其中 n 為環境的折射率,pray為光線所帶的光功率,c 為真空中的光速,fobj是物鏡的焦 距,而 x 與 y 分別是 x 與 y 方向的單位向量。由於相位圖樣所在的方位角區域內所有垂 直入射的光線都會聚到焦點上,因此將所有入射光線在焦點上的貢獻相加起來,焦點上 的總橫向動量通量 pto ta l total t, P 即為
R θ Δθ/ r Δθ/ θ r r p dr dθ r N total 0 2 2 0 0 ray t, total t, P P
R θ Δθ/ r Δθ/ θ r r total obj r r dθ dr N R p f c n N 0 2 2 2 2 0 0 ) sin( ) )[cos( )( ( x y] 19 第三章 光場橫向動量控制 ] sin( [cos( ) 2 / sin( ) ( 3 2 0 0)x )y p Δθ f R n ) c ( total obj , (3-2) 其中 R 是物鏡入曈的半徑,Nr是入射光線束在 SLM 上的光線數量密度,而 pray已由 ptotal/(R2Nr)帶入。 當考慮 SLM 上相位圖樣的繞射效應時,我們假設入射光線束在經過 SLM 後分裂成許多 往不同方向傳播且攜帶不同光功率的準值光線束。這個假設與富氏光學中的角頻譜 (angular spectrum) [37]很類似,但這裡我們假設這些準直光線束只從相位圖樣所在的方 位角區域內發出。在經過物鏡聚焦後,這些準直光線束根據其傳播方向匯聚到焦平面上 各點,並在焦平面上形成光強度分布 I(x,y)。 在一般的狀況下,光強度分布的大小甚小於物鏡的焦距,因此這些準直光線束與光軸間 的夾角接近 0。我們假設這些準直光線束在焦平面上所貢獻的橫向動量通量只和所攜帶 的光功率有關與傳播方向無關。換句或說,在相同總入射光功率下,在單位時間內,整 個光場的橫向動量總和與不考慮繞射效率時焦點上的總橫向動量是相同的。因此光場的 橫向動量通量密度 ptotal(x,y) total J (單位時間內,單位面積下,光場的橫向動量)可以根據光場 的強度分布,將焦點上的總橫向動量通量分配到整個光場中得到,即 ) , ( ) , (x y In x y p ptotal total total t, total P J , (3-3) 其中
-dy dx y x I y x I y x In ) , ( ) , ( ) , ( , (3-4) 為歸一化後的光強度分布。將(3-2)式帶入(3-3)式後,我們可以得到光場的橫向動量通量 密度為 ) , ( ] sin( [cos( ) 2 / sin( ) ( 3 2 ) , ( p Δθ 0 0 I x y f R n ) c ( y x total n obj ptotal )x ) y Jt,total , (3-5) 從(3-5)式中我們可以知道,橫向動量通量密度是沿著[cos(θ0)xsin(θ0)y]方向,此方向 是由決定。橫向動量通量密度的大小,除了正比於光場強度,入射光功率外還正比於 sin(Δ)。當 Δ為 0時,沒有入射光在焦平面上,所以橫向動量通量密度為零。當 Δ 增加時,有越來越多的光線進入焦平面,因此橫向動量通量密度開始增加並在Δ為 180 時達到最大值。但當Δ超過 180時,雖然有更多的光線進入焦平面上,但新加入光線 的貢獻會抵銷部分的橫向動量通量密度,因此橫向動量通量密度開始變小,並在 Δ為 360時完全抵銷。這也是為何在傳統的光學鑷夾中沒有觀察到橫向動量或橫向散射力20 的原因。 產生所需橫向動量分布的光場可以分成兩部分。一是調整方位角範圍的大小使其小於 ,並調整其中心角度以控制橫向動量的方向。另一部分則是計算產生所需強度分布 的相位圖樣,並將之顯示在上述方位角範圍內。計算所需相位圖樣可以由節中所介 紹的 GS、GAA 或 GSW 等方法達成。 3-2-2 實驗架設 圖 11 是實驗的架設圖。實驗所用的捕捉雷射是最高輸出功率為 10 W、波長為 1.064 m
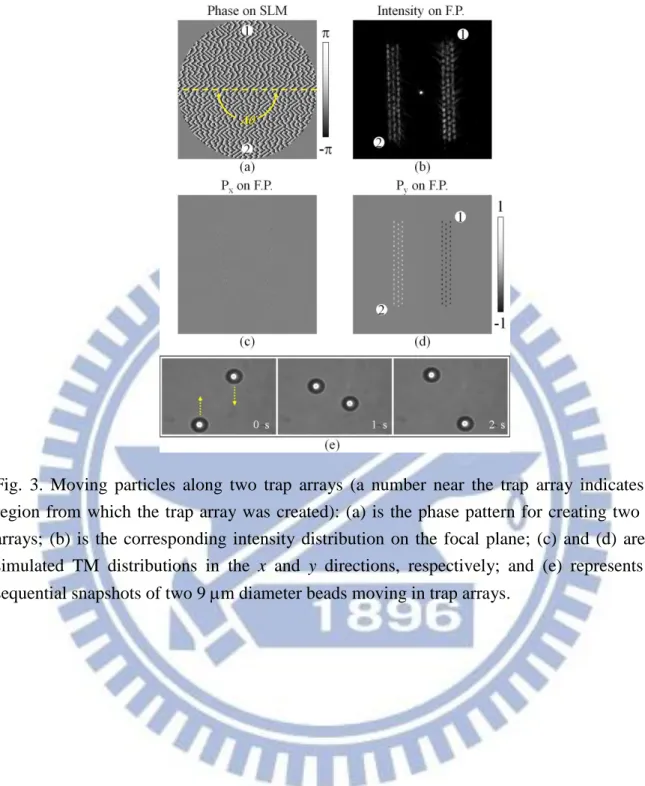
的光纖雷射(YLR-10-1064-LP; IPG photonics)。雷射從光纖射出後先經過擴束器(beam expander)將雷射光點的大小擴大至 SLM (X10468-03; Hamamatsu)的有效區域大小。再經 過一個半波板(half-wave plate)與偏振分光鏡調整入射的光功率後,雷射到達 SLM 上並 調變其空間相位分布。剛經過 SLM 調變後的雷射光經由一望遠鏡(telescope)成像到一個 數值孔鏡為 1.1 的 100 倍水鏡(Plan; Nikon)的後焦平面上。雷射光最後經由物鏡聚焦並在 焦平面上產生所需的光場分布。一個移動平台將實驗樣品固定於焦平面上。樣品由發光 二極體(LED)照明後,經過物鏡與成像鏡(tube lens)成像在 CCD 攝影機(PL-B955G; PixeLink)上。 圖 11 實驗架設 3-2-3 實驗結果 圖 12(a)為產生兩個具有相反方橫向動量方向的捕捉點陣列所需的相位圖樣。此相位圖 樣沿著圖中的虛線可分成兩個方位角區域。每個區域產生一沿 y 方向延伸的捕捉點陣列, 陣列中捕捉點的間距皆為 2 m,並且每個補捉陣列旁的數字標示著產生該陣列的區域, 如圖 12(b)所示。根據(3-5)式,第 1 區的中心角度為 90°,所以其所產生捕捉點陣列的橫 向動量即為沿著負 y 方向。同樣地,因為第 2 區的中心角度為 270°,所以其所產生捕捉
21 第三章 光場橫向動量控制 點陣列的橫向動量即為沿著正 y 方向。 圖 12(c)與圖 12(d)所示分別為歸一化後 x 方向與 y 方向橫向動量分布的模擬結果。橫向 動量分布的計算是將相位圖樣的穿透函數經過快速富氏轉換(FFT)得到在焦平面上的光 場分布,之後再根據(2-8)式計算光場的橫向動量分布。圖中的白色代表正值,黑色代表 負值。從模擬的結果我們可以發現區域 1 所產生的捕捉點陣列的 y 方向橫向動量分布為 黑色,因此是沿著負 y 方向。區域 2 所產生的捕捉點陣列的 y 方向橫向動量分布為白色, 因此是沿著正 y 方向。這些與(3-5)式所預測的結果一致。 我們將這兩個捕捉陣列投射到含有直徑為 9 m 的聚苯乙烯(polystyrene)粒子的水溶液中, 並且讓每一個捕捉陣列剛好只捕捉一個粒子。圖 12(e)是粒子在捕捉陣列中移動的連續 圖。連續圖的時間間隔為 1 秒。在捕捉陣列中的粒子同時受到來自多個捕捉的點的橫向 梯度力,但因為這些梯度力相互抵消,降低了粒子所受到的淨梯度力,所以在捕捉陣列 中粒子只受到極小的橫向梯度力。當粒子散射或吸收了捕捉陣列的光子後,光場中的橫 向動量轉移至粒子上,並讓粒子開始沿著橫向動量的方向前進。當越多的橫向動量轉移 到粒子上時,粒子的移動速度也越快。(3-5)式指出光場橫向動量會正比於入射光的功率 與 sin(Δ),其中Δ是顯示相位圖樣的方位角區域範圍大小,因此粒子的移動速度也會 正比於 sin(Δ)。 圖 12 粒子在兩個具相反方向之橫向動量的捕捉陣列中移動。
22
(a)為所需相位圖樣。(b)為相對應光強度分布。(c)與(d)分別為為歸一化後 x 方向與 y 方向橫向 動量分布的模擬結果。(e)為兩個直徑為 9 m 大小的粒子在捕捉點陣列中移動的連續圖。
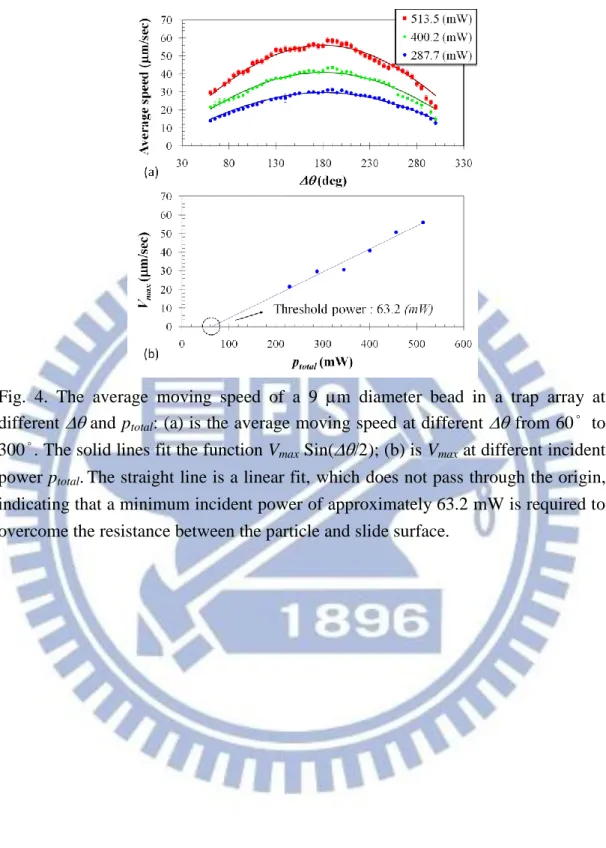
圖 13(a)是在不同的 ptotal與Δ下,粒子在捕捉陣列中 y 方向的平均移動速率。圖中實線
是將實驗數據與函數 Vmax sin(Δ)數值擬合的結果,其中 Vmax為自由參數。從圖中我們
可以看出粒子的移動速度與(3-5)式所預測的橫向動量大小都正比於 sin(Δ)。圖 13(b)
是不同 ptotal下 Vmax的值,而圖中實線是線性數值擬合的結果。Vmax代表固定入射光功率
下的最大粒子移動速率,從(3-5)式我們知道 Vmax應該正比於入射光功率,但數值擬合的
直線並未通過原點。粒子需要大約 63.2 mW 的入射光功率才能被推動,我們猜測這可能 是粒子與載玻片表面間的摩擦力所造成。
圖 13 在不同與 ptotal下,直徑 9 m 粒子捕捉點陣列中 y 方向平均移動速率。
(a)是從為 60°到 300°間的粒子平均移動速率。實線是對函數 Vmax Sin()做數值擬合的結
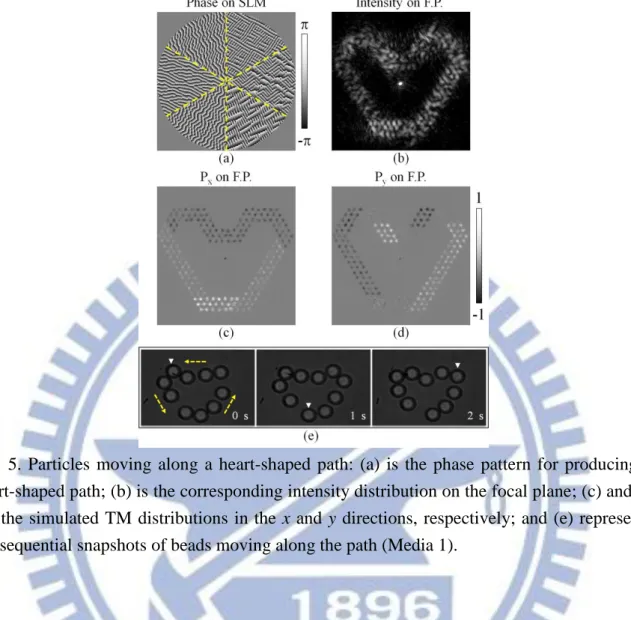
果。(b)是不同的 ptotal下,Vmax的大小,其中直線是線性數值擬合的結果。直線沒通過座標原 點表示至少需要 63.2 mW 的入射光功率才克服粒子與載玻片間的摩擦力而移動粒子。 這種方法也可以用來讓粒子沿著更複雜路徑移動。圖 14(a)是產生心型路徑捕捉點陣列 的相位圖樣。圖 14(b)則是對應的光強度分布。捕捉點的間距為 2 m 且捕捉點的橫向動 量方向都是沿著心型路徑。圖 14(c)與圖 14(d)分別是為歸一化後 x 方向與 y 方向橫向動 量分布的模擬結果。圖 14(e)直徑 9 m 粒子在心型路徑捕捉陣列中移動的連續圖。連續 圖的時間間隔為 1 秒。圖中的白色三角形標示同一粒子在不同時刻的位置。從連續圖中 我們可以看出粒子移動的方向與數值模擬的結果一致。
23 第三章 光場橫向動量控制 圖 14 粒子在一心型路徑的捕捉陣列中移動。 (a)為所需相位圖樣。(b)為相對應光強度分布。(c)與(d)分別為為歸一化後 x 方向與 y 方向橫向 動量分布的模擬結果。(e)為粒子在捕捉點陣列中移動的連續圖,圖中的白色三角形標示同一 粒子在不同時刻的位置。 除了將粒子沿著一封閉路徑移動,此方法還可用來清除樣品空間中的粒子。圖 15(a)是 產生一正六角形捕捉陣列的相位圖樣。此相位圖樣分割成 6 個區域,每一區的相位圖樣 產生一個捕捉點間距為 2 m 的三角形捕捉陣列。每一個三角形捕捉陣列旁的數字代表 產生該陣列的相位區域,如圖 15(b)所示。每一個三角形捕捉陣列的橫向動量皆從六角 形陣列的中心指向外,如圖 15(c)與 15(d)所示。圖 15(e)為利用上述捕捉陣列清空直徑為 0.5 m 粒子。在實驗的開始大部份的粒子是集中在畫面中間,隨著時間過去,捕捉陣列 中的粒子因為獲得光場的橫向動量開始往外移動。在此實驗中,由於粒子的直徑小於捕 捉點間的間距,粒子受到的淨橫向梯度力無法由不同捕捉點間的梯度力相消而降低。但 由於直徑 0.5 m 粒子的布朗運動(Brownian motion)很劇烈且粒子間的碰撞很頻繁,因此 粒子可以藉由碰撞與布朗運動克服梯度力的捕捉並沿著橫向動量向外移動。由於利用布 朗運動跳出捕捉點是隨機過程,因此需要較長的時間等待粒子脫離捕捉點而向外移動。 所以當大部分的粒子皆移到捕捉陣列之外時,粒子間的碰撞次數變少,粒子在捕捉點間 向外跳動只能靠粒子的布朗運動,因此粒子向捕捉陣列外移動的速率會下降。在實驗結 束時,部分的粒子仍被捕捉在捕捉點陣列中。
24 藉由將每個三角形捕捉陣列的橫向動量反向,這個過程即可反轉成集中粒子。因此除了 讓粒子沿著指定路徑移動外,藉由控制光場的橫向動量分布也可用來控制粒子局部濃 度。 圖 15 利用具有橫向動量的捕捉陣列清空直徑為 0.5 m 的粒子。 (a)為所需相位圖樣。(b)為相對應光強度分布。(c)與(d)分別為為歸一化後 x 方向與 y 方向橫向 動量分布的模擬結果。(e)為粒子在捕捉點陣列中移動的連續圖。
25 第四章 使用者介面
第四章
使用者介面
雖然控制光場的橫向動量分布可以在不改變相位圖樣下移動微粒子,但粒子移動的路徑 仍然是固定的。當面對突發狀況時,或是只是想隨意操控微粒子時,這種固定式的操控 粒子的方式就會顯得不足。因此發展一套能提供使用者即時互動式的粒子操控系統就顯 得重要。 但要利用 HOTs 產生捕捉點需要根據使用者所輸入的捕捉點的座標參數,透過前面所介 紹的演算法,計算所需的相位圖樣,並輸入到 SLM 上。在這過程中所需的知識對其他 領域的使用者而言是複雜與困難的。如果只是單純為了使用 HOTs 就必頇具備上述的知 識,則 HOTs 的功能與應用就會大大地被限制住。因此,為方便使用者使用 HOTs 操控粒子,我們利用 LabVIEW (LabVIEW 8.5; National Instruments)建立一套整合即時樣品影像之顯示、使用者輸入資訊之接收與捕捉光點之控 制的圖形式使用者介面,讓使用者可以坐在電腦前,輕鬆的利用滑鼠點選,操控顯微鏡 下微米尺度的粒子。在此介面中,使用者只需用滑鼠在圖形式使用者介面上,在想要產 生捕捉點的位置上點選一下,介面程式即可自行計算所需的相位圖樣資訊,迅速產生捕 捉點,捕捉與操控樣品。讓使用者能專注在實驗的進行上,而非系統的操作上。
4-1 以往的系統操作方式
在此介面程式建立之前,樣品的即時影像是由顯微鏡上的 CCD 擷取,直接顯示在獨立 的螢幕上。當使用者想要捕捉顯微鏡下某一個目標物時,使用者必頇先估計目標物在螢 幕畫面中的座標,再轉換成相關參數並輸入 MATLAB (MATLAB 2008a; MathWorks)計 算出所需的相位分布。計算所得的相位分布再以圖片的形式顯示在 SLM 上,產生所需 的捕捉點捕捉目標物,如圖 16 所示。 由於系統的操作過需要在不同的程式間切換,且相關參數必頇手動輸入,因此當使用者 完成整個過程後,目標物通常也不在原位置了。此外由於目標物的座標是以目測的方式 決定,有時最後產生的捕捉點位置會不在預期的位置上,因此造成操作上的困擾。這些 複雜的操作步驟不僅會造成系統使用上的不便,同時也讓使用者無法專注於實驗本身。26 圖 16 介面程式發展前系統操作流程圖。 在介面程式發展前,系統使用者除了需要具備相關專業知識外,還需要負擔大多數的系統操作 工作,如判斷目標位置、決定捕捉點位置、相位計算、相位顯示等工作,造成系統使用上的不 便。
4-2 介面程式的特點
為了讓任何的使用者,在經過簡單的使用說明後,即可輕鬆使用全像光學鑷夾系統操控 顯微鏡下的微粒子。我們需要建立一套整合即時樣品影像之顯示、使用者輸入資訊之接 收與捕捉光點之控制的圖形式使用者介面。 圖 17 介面程式發展後系統操作流程圖。 在介面程式發展後,介面程式負擔大多數的系統操作工作,如相位計算、相位顯示等工作。使 用者只需在樣品即時影像上,以滑鼠游標指定捕捉點位置,即可利用系統操控微粒子。27 第四章 使用者介面 在此介面程式中,顯微鏡中樣品的即時影像會顯示在介面程式上。使用者利用滑鼠游標 在樣品影像上直接點選,藉此產生、刪除或移動捕捉點。介面程式會根據使用者所輸入 的資訊,計算所需的相位分布,並將所計算的結果顯示在 SLM 上以更新捕捉點,如圖 17 所示。如此使用者只需利用滑鼠點選,即可操控顯微鏡下的物體,即使是非相關領域 的人也能輕鬆使用。
4-3 介面程式的考量與架構
在設計介面程式時,主要有下列幾項因素需要考量: 相位圖樣運算速度: HOTs 要控制捕捉點的產生、移動都需要計算所需的相位圖樣。若要讓使用者即時操控 微粒子,則相位圖樣的計算至少要達到每秒 10 張左右。但計算相位圖樣時會涉及到許 多複數陣列(complex number array)的相乘與疊代,因此目前個人電腦的中央處理器 (central processing unit CPU)運算速度是無法滿足這樣的運算需求,通常 CPU 的計算速度大約只有每秒兩三張左右(CPU : Intel®
CoreTM2 Quad Q9550 2.83 GHz, RAM : 4GB, MATLAB 2008a)。近年來,由於電腦 3D 遊戲的盛行,推動了電腦顯示卡(graphic processing unit GPU)運算效能的發展,讓 GPU 可以提供較 CPU 強大的平行運算效能[54]。 圖 18 是不同的演算法利用 GPU(GeForce GTX 275; NVIDIA) 計算相位圖相對於利用 CPU(Core 2 Quad Q9550; Intel)計算相位圖的加速。圖中的橫軸為相位圖樣的大小,縱軸 是運算速度的加速。利用 GPU 計算相位圖樣至少可以提供約 60 倍的加速。 圖 18 利用 GPU 計算相位圖樣相對於利用 CPU 計算相位圖樣的加速。 0 50 100 150 200 250 300 350 400 450 256 X 256 384 X 384 512 X 512 640 X 640 Sp e e d u p Array size
GPU Speed up
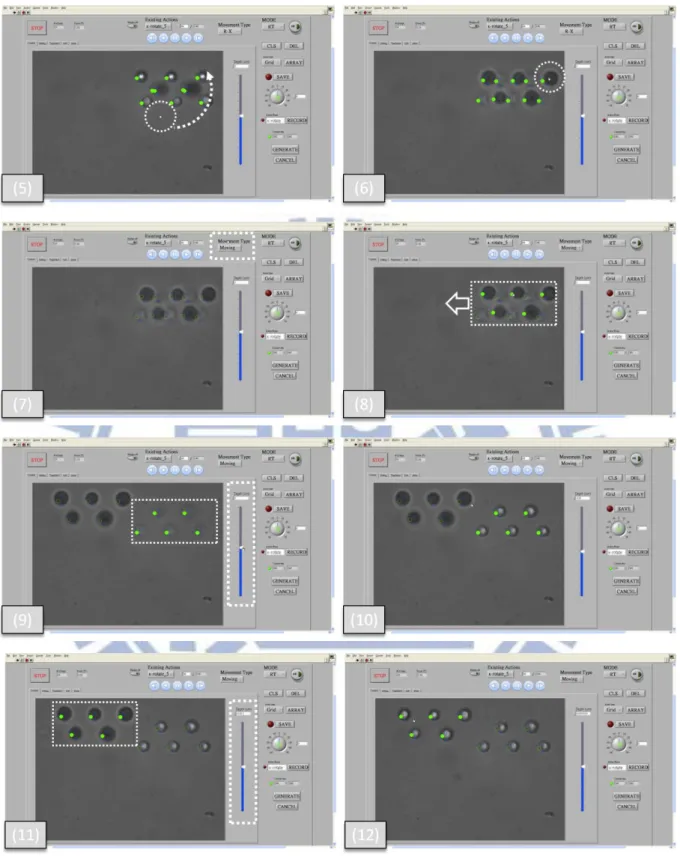
GSW GAA GS28 樣品影像顯示、相位圖樣運算的不同步: 在顯示樣品的影像時,通常影像的更新速率最慢是每秒 15 張。利用 GPU 計算相位圖樣 雖然較利用 CPU 計算快速,但是當捕捉點的數量增加時,計算相位圖樣所需的時間也 會增加,造成相位圖樣計算速率低於每秒 15 張。為了避免樣品影像的顯示被相位圖樣 的計算所拖累,我們將這兩項工作分別置於不同的迴圈中。同時,由於介面程式需要快 速、連續的接收使用者的輸入資訊與顯示捕捉點的資訊,我們將使用者的輸入資訊接收 置於另一獨立迴圈中。此外,介面程式需要將相位圖樣 顯示於 SLM 上,而所顯示的相 位圖樣除了即時計算外,還可以選擇讀取先前所儲存的檔案,因此相位圖樣顯示的工作 又另置於一迴圈中。因此介面程式的基本架構為四個獨立迴圈,每一個迴圈所負責的工 作分別為:相位圖樣的計算、樣品影像的顯示、使用者輸入資訊的處理與相位圖樣的顯 示。 電腦資源有效利用: 由於相位分布的計算需要很大的運算量,如果介面程式一直不斷的在計算相位分布,將 容易造成介面程式其他部分的資源不足,拖慢樣品影像更新速度,或是造成程式反應遲 滯等現象。為降低電腦運算資源的浪費,相位圖樣只在使用者更新捕捉點時才會進行計 算。此外,目前電腦的中央處理器皆具有多核心,可以同時執行多執行緒(thread),因此 將介面程式主要工作分散於四個獨立迴圈中除了可以讓各迴圈中的工作不互相影響外, 也能充分利用電腦 CPU 多核心的功能。 視窗作業系統式的滑鼠操作模式: 由於樣品的影像中看不到捕捉光點的位置,為了讓使用者知道捕捉點的位置與性質,介 面程式必頇在樣品的影像中捕捉點的位置上標示記號。同時我們希望任何的使用者,在 經過簡單的使用說明後,都能使用此程式,因此我們需要將捕捉點記號的操作模式盡量 貼近視窗作業系統下滑鼠點選物件的操作模式。使用者可以用滑鼠選取、產生、改變捕 捉點記號。 群組操控模式: 在利用 HOTs 操控粒子時,HOTs 對於粒子的移動是藉由更新捕捉點的空間位置,而捕 捉點位置的控制則是利用滑鼠游標拖曳捕捉點達成。但由於介面中的滑鼠游標只有一個, 若是要將數個被捕捉的物體旋轉、等比例放大或是縮小,就需要先根據所需的動作計算 運動後的捕捉點位置,變更所有捕捉點的位置,因此造成操作上的麻煩。為了簡化操作, 我們在介面程式中設計了群組操控模式。在群組操作模式下,我們建立了所選取的捕捉 點對 x、y 與 z 軸的轉動與等比例放大與縮小等動作。使用者可以簡單利用這些群組操控 模式,同時操控多個被捕捉的物體。
29 第四章 使用者介面