國立交通大學
電機與控制工程學系
碩士論文
移動式機器人之行為融合控制器設計
Design of a Behavior-Fusion Controller for
Mobile Robot Navigation
研 究 生:林鎮源
指導教授:宋開泰 博士
移動式機器人之行為融合控制器設計
Design of a Behavior-Fusion Controller
for Mobile Robot Navigation
研 究 生:林鎮源 Student: Jean-Yuan Lin
指導教授:宋開泰 博士 Advisor: Dr. Kai-Tai Song
國 立 交 通 大 學 電 機 與 控 制 工 程 學 系
碩 士 論 文
A Thesis
Submitted to Department of Electrical and Control Engineering College of Electrical Engineering and Computer Science
National Chiao Tung University in Partial Fulfillment of the Requirements
for the Degree of Master in
Electrical and Control Engineering July 2005
Hsinchu, Taiwan, Republic of China
移動式機器人之行為融合控制器設計
研究生:林 鎮 源 指導教授:宋 開 泰 博士 國立交通大學電機與控制工程學系摘 要
本論文之主旨在以行為融合的方法設計機器人之導航控制系統。由於 在週遭環境情況類似下,行為架構模式的機器人其輸出行為表現的融合比 例應該也會類似;本論文提出以一啟發性模糊類神經網路設計行為融合比 例,文中首先設計閃避障礙物、目標物追蹤、沿牆行走等三個行為。藉由 超音波感測器收集周圍的環境資訊,作為個別行為模糊控制器的輸入,以 決定在不同的環境資訊下,各行為的輸出表現。接着透過類神經網路設計 一行為融合架構,來決定機器人在當時環境中之行為融合比重。由環境資 訊與所建立之規則表中各典型環境的相似程度,能即時決定機器人導航的 行為融合比例。經由電腦模擬與實際導航實驗,驗證本設計具有令人滿意 的導航功效。Design of a Behavior-Fusion Controller
for Mobile Robot Navigation
Student:Jean-Yuan Lin Advisor:Dr. Kai-Tai Song
Department of Electrical and Control Engineering National Chiao Tung University
ABSTRACT
The thesis presents a design of behavior-fusion architecture for mobile robot navigation. We first design three behaviors for robot navigation, including obstacle avoidance, wall following, and goal seeking using fuzzy-logic control approach. Then, the fusion weight of each behavior is determined by using the proposed behavior-fusion neural network. The neural network maps the current environment sensor data to suitable fusion weights. Both computer simulation and practical experiments verify the effectiveness of the method.
致謝
謹向我的指導教授宋開泰博士致上感謝之意,感謝他兩年來在專業上 的指導,以他豐富的學識與經驗,配合理論的應用,使得本論文得以順利 完成。 感謝學長任詔、奇鎰、嘉豪及孟儒的指導,以及感謝與我共同奮鬥的 同學松峙、柏秋、維祥及崇民的相互鼓勵及提攜,同時也感謝學弟忠憲、 晉懷、宏宜、富全及鎮謙在生活上帶來的樂趣。 最後,特別感謝我的父母,由於他們辛苦栽培,在生活上給予我細心 地關愛與照料,使得我才得以順利完成此論文;在此我願以此論文獻給我 最感謝的老師、父母、學長、同學、學弟。目錄
摘要 ………...i Abstract………...ii 致謝 ……….iii 目錄 ……….iv 圖 例 ……….vi 表 例 ………...viii 第 一 章 緒論 ...1 1.1 研 究 動 機 ...1 1.2 相 關 研 究 回 顧 ...2 1.3 問 題 描 述 ...6 1.4 章 節 說 明 ...7 第 二 章 機 器 人 導 航 行 為 設 計 ...8 2.1 模 糊 控 制 在 機 器 人 導 航 之 應 用 ...8 2.2 閃 避 障 礙 物 行 為 (Obstacle avoidance)的 設 計 ...10 2.3 沿 牆 行 走 行 為 (Wall following)的 設 計 ...14 2.4 目 標 物 追 蹤 的 設 計 ...17 2.5 結 論 與 討 論 ...20 第 三 章 行 為 融 合 的 設 計 ...22 3.1 導 航 系 統 架 構 ...22 3.2 導 航 行 為 融 合 的 設 計 ...23 3.3 利 用 啟 發 式 網 路 歸 類 環 境 以 決 定 行 為 融 合 權 重 ...24 3.3.1 Kohonen 模 糊 分 類 網 路 ...26 3.3.2 啟 發 性 網 路 ―結 合 FKCN 與 規 則 表 ...28 3.4 網 路 輸 入 : 感 測 器 與 目 標 方 向 的 量 化 ...31 3.5 典 型 圖 樣 與 規 則 表 的 建 立 ...34 第 四 章 機 器 人 硬 體 架 構 ...40 4.1 機 器 人 系 統 ...40 4.2 機 器 人 控 制 架 構 ...41 4.2.1 馬 達 控 制 系 統 ...42 4.2.2 超 音 波 感 測 系 統 ...43 4.3 超 音 波 感 測 器 的 特 性 與 設 計 原 理 ...434.3.1 超 音 波 測 距 模 組 : Polaroid 6500 Range Module...45
4.3.2 超 音 波 感 測 器 的 配 置 與 性 能 ...47
4.4 機 器 人 姿 態 估 測 系 統 ...47
第 五 章 模 擬 與 實 驗 結 果 ...49
5.2 環 境 一 : 狹 長 走 廊 進 行 閃 避 障 礙 物 行 為 ...49 5.2.1 環 境 一 模 擬 結 果 ...49 5.2.2 環 境 一 實 驗 結 果 ...52 5.3 環 境 二 : 在 死 巷 子 及 狹 長 通 道 之 導 航 ...54 5.3.1 環 境 二 模 擬 之 結 果 ...54 5.3.3 環 境 二 之 實 驗 結 果 ...56 5.4 在 實 驗 室 複 雜 室 内 環 境 及 通 過 窄 門 之 導 航 ...58 5.4.1 環 境 三 模 擬 結 果 討 論 ...58 5.4.3 環 境 三 之 實 驗 結 果 ...60 5.5 實 驗 四 : 長 直 通 道 環 境 之 實 驗 ...62 第 六 章 結 論 與 未 來 展 望 ...64 6.1 結 論 ...64 6.2 未 來 展 望 ...65 參 考 文 獻 ...67
圖 例
圖 1.1 行 為 模 式 型 控 制 系 統 ….……….2 圖 1.2 障 礙 物 位 於 機 器 人 與 目 標 之 間 …...5 圖 2.1 超 音 波 感 測 範 圍 ……….11 圖 2.2 閃 避 障 礙 物 決 策 流 程 ………...11 圖 2.3 閃 避 障 礙 物 的 模 糊 控 制 器 輸 入 與 輸 出 歸 屬 函 數 ……….13 圖 2.4 閃 避 障 礙 物 模 糊 控 制 器 輸 入 與 輸 出 關 係 圖 ………..13 圖 2.5 沿 牆 行 走 行 為 設 計 示 意 圖 ………16 圖 2.6 沿 牆 行 走 行 為 設 計 輸 入 輸 出 流 程 ………16 圖 2.7 沿 牆 行 走 行 為 模 糊 控 制 器 的 設 計 輸 入 與 輸 出 歸 屬 函 數 .17 圖 2.8 沿 牆 行 走 行 為 模 糊 控 制 器 輸 入 與 輸 出 關 係 圖 …………..17 圖 2.9 目 標 物 追 蹤 行 為 設 計 示 意 圖 ………19 圖 2.10 目 標 物 追 蹤 行 為 模 糊 控 制 器 的 設 計 輸 入 與 輸 出 歸 屬 函 數………...20 圖 2.11 目 標 物 追 蹤 型 為 模 糊 控 制 器 輸 入 與 輸 出 關 係 圖 ………20 圖 3.1 導 航 任 務 行 為 融 合 的 設 計 ………23 圖 3.2 FKCN 網 路 架 構 ……….………..23 圖 3.3 導 航 任 務 行 為 融 合 架 構 ……….25 圖 3.4 行 為 融 合 啟 發 性 網 路 ……….29 圖 3.5 超 音 波 偵 測 方 向 ………..29 圖 3.6 目 標 方 向 區 分 示 意 圖 ……….34 圖 3.7 八 種 典 型 圖 樣 ………..36 圖 3.8 環 境 類 型 與 行 為 表 現 可 能 關 係 ………37 圖 4.1 實 驗 室 自 行 研 製 之 自 走 式 機 器 人 ………41 圖 4.2 機 器 人 控 制 系 統 架 構 圖 ……….42圖 4.3 超 音 波 控 制 模 組 設 計 方 塊 圖 ………...…….43
圖 4.4 Example of Single-Echo-Mode Cycle without Blanking Input………..46 圖 4.5 超 音 波 感 測 器 配 置 圖 ……….46 圖 5.1 環 境 一 中 的 模 擬 結 果 ……….……51 圖 5.2 環 境 一 模 擬 中 個 別 行 為 的 融 和 比 重 紀 錄 ……….….51 圖 5.3 環 境 一 模 擬 中 左 右 輪 速 度 紀 錄 (cm/sec)………....52 圖 5.4 環 境 一 中 的 實 驗 結 果 ……….…...52 圖 5.5 環 境 一 中 的 實 驗 結 果 的 個 別 行 為 的 融 和 比 重 紀 錄 ….…53 圖 5.6 環 境 一 的 實 驗 中 左 右 輪 速 度 紀 錄 (cm/sec)………....53 圖 5.7 環 境 二 中 的 模 擬 結 果 ………....55 圖 5.8 環 境 二 模 擬 中 個 別 行 為 的 融 和 比 重 紀 錄 ……….….55 圖 5.9 環 境 二 模 擬 中 左 右 輪 速 度 紀 錄 (cm/sec)……….……56 圖 5.10 實 驗 二 的 機 器 人 行 走 軌 跡 圖 ……….….57 圖 5.11 實 驗 二 中 個 別 行 為 的 融 和 比 重 紀 錄 ……….…57 圖 5.12 實 驗 二 中 左 右 輪 速 度 紀 錄 (cm/sec)……….…..58 圖 5.13 環 境 三 中 的 模 擬 結 果 ……….…..59 圖 5.14 環 境 三 中 個 別 行 為 的 融 和 比 重 紀 錄 ……….60 圖 5.15 環 境 三 中 左 右 輪 速 度 紀 錄 (cm/sec)………...60 圖 5.16 實 驗 三 的 機 器 人 行 走 軌 跡 圖 ………..61 圖 5.17 實 驗 三 中 個 別 行 為 的 融 和 比 重 紀 錄 ……….61 圖 5.18 實 驗 三 中 左 右 輪 速 度 紀 錄 (cm/sec)………61 圖 5.19 實 驗 四 的 機 器 人 行 走 軌 跡 圖 ………...62 圖 5.20 實 驗 四 中 個 別 行 為 的 融 和 比 重 紀 錄 ………..63 圖 5.21 實 驗 四 中 左 右 輪 速 度 紀 錄 (cm/sec)……….63
表 例
第 一 章
緒論
1.1 研 究 動 機
在 近 年 來 智 慧 型 機 器 人 的 發 展 上 , 使 機 器 人 在 家 庭 環 境 中 具 有 自 由 移 動 的 能 力 是 一 項 重 要 的 課 題。倘 若 機 器 人 在 未 知 環 境 中 具 有 自 由 移 動 的 能 力,則 其 功 能 便 具 有 更 大 的 運 用 空 間,如 此 一 來 勢 必 能 為 人 類 提 供 更 多 服 務,並 且 與 人 類 之 間 能 夠 有 更 多 的 互 動 。 例 如 日 本 Honda 公 司 所 推 出 的 ASIMO 機 器 人 , 其 頭 部 裝 設 有 兩 台 CCD Camera, 用 以 計 算 出 自 己 與 周 圍 物 體 之 間 的 距 離 , 藉 以 自 動 繞 開 障 礙 物 行 走 , 或 是 到 達 某 一 定 點 。 吸 塵 器 機 器 人 Roomba 能 夠 在 無 人 監 督 的 狀 況 下 自 動 清 潔 家 庭 地 板 , 這 些 都 說 明 了 走 入 到 人 類 的 生 活 的 智 慧 型 機 器 人 已 經 成 為 一 種 趨 勢。事 實 上,具 有 自 動 導 航 能 力 的 機 器 人 可 被 用 來 作 保 全、清 潔 甚 或 者 是 家 庭 看 護 等 用 途,在 不 久 的 將 來,具 有 更 多 功 能 更 強 能 力 的 機 器 人 將 存 在 於 人 類 日 常 生 活 之 中,而 不 再 只 是 存 在 於 實 驗 室 或 是 科 幻 小 說 之 中 。 目 前 移 動 式 機 器 人 的 發 展 趨 勢 已 脫 離 早 期 的 工 廠 中 需 要 預 先 鋪 設 軌 跡 的 設 計,此 一 進 展 說 明 人 們 要 求 機 器 人 在 功 能 上 具 有 更 多 便 利 性、更 加 的 靈 巧,能 自 行 透 過 對 於 週 遭 環 境 的 感 測 資 訊 判 斷 移 動 路 徑 的 智 慧 型 機 器 人 已 是 一 種 發 展 上 的 需 求。相 對 於 早 期 的 設 計 上,移 動 式 的 智 慧 型 機 器 人 必 須 對 於 較 為 複 雜 的 環 境 具 有 應 對 能 力,對 於 不 同 的 環 境 下 都 能 夠 迅 速 反 應。本 篇 論 文 的 主 旨 在 於 研 究 基 於 行 為 概 念 的 架 構(behavior-based architecture)[1] 上,透 過 對 於 環 境 的 識 別 比 較 來 決 定 機 器 人 的 個 別 行 為 的 融 合 比 重,使 得 機 器 人 具 有 自 動 導 航 的 能 力,並 且 能 夠 在 持 續 變 化 且 無 法 預 期 的 環 境 中 也 可 以 進 行 即 時 有 效 的 移 動,達 成 其 所 賦 予 的 任務 。
1.2 相 關 研 究 回 顧
關 於 移 動 式 機 器 人 的 研 究,自 從 1986 年 Brooks 提 出 以 行 為 為 概 念 ,『 將 一 個 完 整 但 複 雜 的 導 航 任 務 分 解 成 數 個 較 簡 單 的 行 為 並 且 以 平 行 並 聯 方 式 同 時 執 行 』[1],來 做 為 機 器 人 導 航 設 計 , 其 架 構 如 圖 1.1 所 示。相 對 於 早 期 機 器 人 以 功 能 作 為 區 分 的 小 模 組 , 再 將 每 個 模 組 依 其 順 序 關 係 形 成 一 個 串 聯 式 的 流 程 設 計 (sense-model-plan-act), 行 為 模 式 的 架 構 使 得 環 境 感 測 器 的 輸 入 資 訊 跟 機 器 人 行 為 的 輸 出 動 作 之 間 的 結 合 更 為 緊 密,整 個 感 測 器 輸 入 到 機 器 人 動 作 輸 出 之 間 需 要 花 費 的 時 間 減 少 了 許 多,並 且 因 為 平 行 執 行 的 緣 故,系 統 上 計 算 量 上 的 需 求 也 降 低 了,使 得 反 應 較 為 迅 速 的 行 為 模 式 架 構 的 導 航 方 法 較 為 有 利 於 將 導 航 控 制 器 置 於 移 動 式 機 器 人 上 。 由 於 Brooks 的 行 為 模 式 架 構 上 功 能 區 塊 是 以 行 為 來 加 以 劃 分 , 且 以 平 行 並 聯 方 式 同 時 執 行 , 因 此 , 更 能 滿 足 即 時 反 應 的 需 求,所 以 在 行 為 模 式 架 構 提 出 之 後,有 許 多 關 於 機 器 人 導 航 的 研 究 被 提 出 跟 討 論[2-10]。 1.1 行為模式型控制系統總 體 而 言 , 使 用 behavior-based 架 構 有 下 列 好 處 : A. 因 為 架 構 上 將 導 航 任 務 分 解 為 數 個 較 為 簡 單 的 行 為 , 單 一 的 行 為 由 於 較 為 單 純 , 設 計 上 變 得 較 為 簡 單 , 同 時 計 算 量 相 較 之 下 也 顯 得 更 少 , 所 以 機 器 人 可 以 更 快 的 產 生 動 作 。 同 時 因 為 計 算 量 的 減 少 , 使 得 機 器 人 所 搭 載 的 微 電 腦 或 微 控 器 便 足 以 處 理 , 導 航 控 制 器 可 直 接 建 立 於 移 動 式 機 器 人 上 。 B. 由 於 機 器 人 的 輸 出 行 為 是 由 多 個 簡 單 行 為 的 結 合 來 決 定 最 後 輸 出 , 個 別 的 行 為 都 是 為 了 達 成 某 一 特 定 目 的 而 設 計[2], 所 以 當 部 分 模 組 無 法 正 常 工 作 時 , 其 他 的 行 為 依 然 可 以 正 常 工 作 , 整 個 架 構 上 具 有 較 高 的 穩 健 度 。 並 且 可 依 不 同 任 務 或 需 求 予 以 增 減 行 為 模 組 而 不 影 響 其 他 行 為 模 組 的 運 作 , 整 個 架 構 顯 得 更 為 有 彈 性 。 C. 以 行 為 為 概 念 的 移 動 式 機 器 人 架 構 不 需 準 確 建 立 環 境 模 型[3]。 因 為 以 行 為 為 概 念 的 移 動 式 機 器 人 是 屬 於 由 下 而 上(Physically grounded bottom-up reactive system)的 設 計 , 是 由 設 計 的 行 為 模 組 平 行 進 行 計 算 最 後 並 聯 輸 出 , 並 非 以 環 境 模 型 來 計 算 進 行 導 航 。 其 次 , 對 於 各 個 行 為 之 間 所 需 要 與 接 收 的 感 測 器 資 訊 不 見 得 相 同 , 換 而 言 之 , 當 感 測 器 中 有 部 份 產 生 誤 差 時 , 受 到 影 響 的 僅 有 以 此 感 測 器 作 為 行 為 之 功 能 輸 入 項 , 對 於 其 他 不 需 採 用 到 該 感 測 器 資 訊 的 行 為 自 然 不 會 受 到 影 響 。 最 後 的 輸 出 由 所 有 的 行 為 根 據 其 仲 裁 或 是 融 合 方 式 加 以 決 定 , 所 以 以 行 為 為 概 念 的 移 動 式 機 器 人 並 不 需 要 建 立 精 確 的 環 境 模 型 。 在 行 為 模 組 架 構 中 , 由 於 將 導 航 任 務 分 解 為 數 個 行 為 來 完
成 , 個 別 行 為 都 是 為 了 完 成 特 定 的 導 航 目 的 而 設 計 。 例 如 : 閃 避 障 礙 物(Obstacle avoidance)其 主 要 目 的 在 於 使 機 器 人 在 移 動 過 程 中 能 夠 避 開 障 礙 物 而 不 發 生 碰 撞。沿 牆 行 走(Wall following)的 行 為 設 計 目 的 在 於 讓 機 器 人 能 夠 沿 著 環 境 的 邊 界 行 走。目 標 物 追 蹤 (Goal seeking)行 為 設 計 上 是 為 了 使 得 機 器 人 在 移 動 期 間 能 夠 盡 量 往 目 標 物 方 向 移 動 。 在 此 一 規 範 下 , 因 各 行 為 的 設 計 目 的 不 同,所 以 各 模 組 設 計 上 是 獨 立 分 開 的,最 後 再 透 過 並 聯 的 方 式 產 生 輸 出 行 為。其 中 行 為 模 式 架 構 中,一 些 較 簡 單 的 行 為 是 根 據 環 境 的 感 測 輸 入 以 類 似 映 射 的 方 式 產 生 , 如 同 人 類 的 反 射 動 作 一 般 , 因 此 行 為 模 式 也 被 稱 為 是 一 反 射(Reactive)行 為 的 控 制 系 統。並 且 架 構 上 各 行 為 最 後 以 並 聯 方 式 輸 出,使 得 設 計 上 各 個 行 為 能 夠 獨 立 分 開 而 不 需 考 慮 承 接 的 順 序,所 以 計 算 上 可 以 平 行 進 行 , 其 所 需 的 時 間 亦 大 為 縮 短 。 另 外 , 對 於 較 為 複 雜 的 行 為 , 亦 存 在 有 將 一 個 行 為 在 分 割 成 數 個 動 作 來 加 以 處 理 的 方 法[3]。 因 此 行 為 架 構(behavior based)的 優 點 很 多, 所 以 自 提 出 以 來, 許 多 建 立 在 此 架 構 上 的 機 器 人 導 航 方 法 被 提 出 來,像 是 結 合 模 糊 邏 輯 (Fuzzy Logic)[4-7]、 類 神 經 網 路 (ANN)[8-9]、 基 因 演 算 法
(GA)[10-11]等 等 來 設 計 。 以 行 為 模 式 架 構 所 設 計 的 機 器 人 , 因 為 各 行 為 模 組 分 開 設 計,讓 單 一 行 為 的 設 計 較 為 容 易,使 得 移 動 式 的 機 器 人 執 行 效 率 得 以 改 進,但 是 也 延 伸 出 另 外 一 個 被 需 要 解 決 的 問 題,那 就 是 最 終 機 器 人 的 行 為 輸 出 部 分 該 如 何 決 定?依 行 為 模 式 架 構 上 而 言 , 依 導 航 任 務 分 解 出 來 的 多 個 行 為 模 組 是 同 時 平 行 計 算 處 理 的,但 是 各 個 行 為 模 組 設 計 上 的 目 的 都 不 相 同,那 麼 最 終 輸 出 的 行 為 表 現 又 當 如 何 協 調,才 能 處 理 行 為 之 間 的 衝 突 ? 舉 例 而 言 ,
圖 1.2 障 礙 物 位 於 機 器 人 與 目 標 之 間 像 是 閃 避 障 礙 物 與 目 標 物 追 蹤 行 為 , 在 如 圖 1.2 的 環 境 中 , 閃 避 障 礙 物 的 行 為 輸 出 會 使 機 器 人 由 左 邊 或 是 右 邊 繞 開,但 是 繞 開 之 後 則 未 必 往 目 標 物 所 在 處 移 動,另 一 方 面,目 標 物 追 蹤 的 行 為 輸 出 則 會 使 機 器 人 調 整 行 進 方 向,使 其 往 目 標 物 所 在 之 處 前 進,則 很 可 能 會 撞 上 路 徑 上 的 障 礙 物。就 此 例 而 言,明 確 顯 示 各 行 為 之 間 的 確 可 能 發 生 衝 突,會 出 現 此 一 問 題 的 原 因 在 於 所 設 計 的 行 為 都 是 為 了 達 到 其 特 定 的 導 航 目 的,而 各 行 為 之 間 並 不 會 考 慮 其 他 行 為 的 輸 出,因 此 有 多 個 行 為 時,個 別 的 行 為 輸 出 就 有 可 能 產 生 衝 突 的 情 況。這 也 是 行 為 模 式 架 構 所 需 面 對 的 一 個 重 要 的 問 題 。 目 前 行 為 模 式 架 構 中 , 行 為 協 調 的 方 式 可 概 略 分 為 兩 個 類 別:行 為 仲 裁(Arbitration)[1]與 行 為 融 合 (Fusion)[12-13]。兩 者 的 區 分 在 於:行 為 仲 裁 最 後 的 輸 出,通 常 是 所 有 設 計 行 為 的 其 中 一 個 ; 而 行 為 融 合 對 於 最 後 的 輸 出 , 每 個 行 為 都 有 參 與 , 只 是 其 參 與 的 程 度 有 多 有 少 。
以 此 兩 種 行 為 協 調 方 式 而 言 , 各 有 其 優 缺 點 。 行 為 仲 裁 部 分 因 每 次 輸 出 的 行 為 皆 只 有 所 有 行 為 設 計 中 其 中 的 一 個,所 以 當 控 制 行 為 不 停 的 切 換 改 變 時,機 器 人 的 動 作 顯 得 較 不 流 暢,然 而 卻 具 有 較 好 的 強 健 度 , 同 時 行 為 模 組 增 加 時 的 協 調 方 式 亦 較 為 簡 單。 行 為 融 合 則 剛 好 相 反,強 健 度 上 的 表 現 較 差, 但 是 整 個 動 作 流 程 較 為 流 暢。導 致 這 個 差 異 的 主 要 原 因 在 於 個 別 的 行 為 模 組 設 計 乃 是 為 了 達 到 特 定 的 導 航 目 的,所 以 對 於 相 同 環 境 之 下,個 別 的 行 為 其 反 應 迥 異,所 以 倘 若 當 環 境 複 雜 導 致 以 仲 裁 為 行 為 協 調 方 式 的 輸 出 不 停 切 換,自 然 會 有 少 許 動 作 不 流 暢 的 現 象;而 以 融 合 為 行 為 協 調 方 式 , 具 體 來 講 , 當 環 境 改 變 時 , 每 個 行 為 都 會 被 表 現 出 來,只 是 在 時 間 上 的 前 後 行 為 表 現 出 來 的 比 例 高 低 不 同 , 而 總 輸 出 的 導 航 表 現 合 適 與 否 , 則 與 其 融 合 方 式 是 否 有 效 率 有 關 。
1.3 問 題 描 述
在 行 為 融 合 的 方 法 上,已 有 許 多 報 告 提 出,例 如 透 過 模 糊 邏 輯 來 做 行 為 的 設 計 與 行 為 融 合[14-15],大 大 地 降 低 行 為 設 計 的 計 算 量 , 使 得 行 為 設 計 更 加 的 簡 單 易 行 , 並 且 加 速 的 反 應 的 時 間 , 並 且 在 行 為 融 合 方 面,透 過 模 糊 邏 輯 中 將 歸 屬 函 數 所 對 應 的 行 為 融 合 設 計 加 以 解 模 糊 化,來 得 到 行 為 融 合 比 例;或 是 結 合 類 神 經 網 路 [16-17]讓 機 器 人 學 習 感 測 與 環 境 的 關 係 , 此 類 神 經 網 路 透 過 環 境 的 輸 入 可 以 改 變 模 糊 控 制 器 中 的 歸 屬 函 數,因 此 行 為 融 合 時 個 別 行 為 的 融 合 比 重 可 以 隨 着 環 境 資 訊 更 新。但 是 這 種 透 過 類 神 經 網 路 加 以 訓 練 的 方 式,因 為 訓 練 過 程 中 網 路 的 鍵 結 值 收 斂 的 時 間 通 常 需 要 耗 掉 比 較 多 的 時 間,訓 練 過 程 顯 得 較 為 耗 時,在 本論 文 中 提 出 一 個 想 法,就 是 以 圖 形 識 別 網 路 來 判 斷 機 器 人 所 處 的 環 境 類 型 較 為 接 近 哪 種 情 況,並 以 其 相 似 程 度 作 為 行 為 融 合 的 參 考 值 , 並 建 立 應 對 於 常 發 生 的 環 境 資 訊 與 行 為 融 和 比 重 的 規 則 表 。 透 過 兩 者 的 結 合 , 形 成 一 啟 發 性 網 路 , 來 決 定 面 對 各 種 環 境 類 型 下 的 行 為 融 和 比 重。此 一 設 計 上 的 目 的 在 於 藉 由 規 則 表 中 典 型 圖 樣 的 設 定 來 減 少 類 神 經 網 路 的 鍵 結 值 訓 練 時 花 費 的 時 間,並 且 我 們 對 典 型 圖 樣 的 設 計 做 一 說 明,並 藉 由 電 腦 模 擬 與 實 驗 證 明 其 可 行 性 。
1.4 章 節 說 明
本 論 文 共 分 為 六 章,第 一 章 為 緒 論,介 紹 移 動 式 機 器 人 在 設 計 上 可 能 遭 遇 到 的 問 題 並 就 到 目 前 為 止 相 關 的 研 究 做 一 說 明。第 二 章 說 明 機 器 人 導 航 行 為 上 的 設 計,以 及 行 為 融 合 的 方 式。第 三 章 則 介 紹 本 論 文 中 所 要 使 用 的 透 過 圖 樣 辨 識 做 環 境 歸 類 來 進 行 機 器 人 行 為 融 合 的 基 本 概 念 與 規 則 表 之 建 立。第 四 章 介 紹 機 器 人 硬 體 架 構 的 組 成,包 含 機 器 人 探 測 環 境 資 訊 所 使 用 的 超 音 波 感 測 模 組 與 位 置 估 測 系 統。第 五 章 為 電 腦 模 擬 與 實 際 上 測 試 的 機 器 人 導 航 實 驗 結 果 。 第 六 章 為 結 論 與 未 來 展 望 。第 二 章 機 器 人 導 航 行 為 設 計
本 章 之 重 點 在 於 陳 述 如 何 透 過 簡 單 模 糊 控 制 規 則 的 使 用 , 來 設 計 機 器 人 的 導 航 行 為,使 得 計 算 量 可 以 有 效 的 降 低 以 加 快 處 理 的 速 度。導 航 行 為 的 設 計 上,目 前 將 導 航 任 務 分 成 三 個 行 為 來 處 理 , 分 別 是 閃 避 障 礙 物 、 沿 牆 行 走 、 目 標 物 追 蹤 三 個 行 為 。 機 器 人 本 身 我 們 假 設 已 經 先 給 予 一 個 線 速 度 在 前 進,若 三 個 行 為 都 沒 有 輸 出 的 話,機 器 人 會 不 改 變 方 向 地 往 前 行 走,而 三 個 行 為 的 輸 出 其 作 用 就 在 於 改 變 移 動 式 機 器 人 的 行 進 方 向,來 完 成 閃 避 障 礙 物 、 沿 牆 行 走 、 目 標 物 追 蹤 等 工 作 。 就 三 個 行 為 模 組 設 計 的 模 糊 控 制 器 而 言,閃 避 障 礙 物 與 沿 牆 行 走 輸 入 項 都 是 超 音 波 感 測 資 訊,透 過 設 計 的 模 糊 控 制 器 得 到 兩 輪 的 速 度 修 正 值,用 以 改 變 機 器 人 行 進 的 方 向;目 標 物 追 蹤 的 輸 入 項 則 藉 由 馬 達 encoder 每 50 ms 經 由 運 動 控 制 卡 回 傳 的 資 料 , 不 斷 更 新 機 器 人 所 在 位 置 與 前 進 的 方 向,來 決 定 與 目 標 物 的 相 對 位 置 關 係,並 將 之 作 為 目 標 物 追 蹤 的 模 糊 控 制 器 輸 入;三 個 行 為 所 需 求 的 資 訊 各 自 從 機 器 人 上 所 裝 置 的 9 個 超 音 波 感 測 器 與 運 動 控 制 卡 所 傳 回 資 訊 取 得,分 別 通 過 三 個 行 為 設 計 的 模 糊 控 制 器 來 得 到 該 行 為 的 輸 出,最 後 再 透 過 第 三 章 所 設 計 的 行 為 融 合 架 構 加 以 融 合 作 為 輸 出 。2.1 模 糊 控 制 在 機 器 人 導 航 之 應 用
當 機 器 人 在 未 知 環 境 中 移 動 時 , 機 器 人 需 要 利 用 本 身 所 具 有 的 感 測 能 力,例 如 本 論 文 所 使 用 的 為 超 音 波(ultrasonic)感 測 器 測 距 來 探 測 周 圍 的 環 境 資 訊,做 為 導 航 系 統 的 輸 入,使 其 能 安 全 行 駛 於 未 知 環 境 當 中,但 是 獲 得 的 環 境 資 訊 正 確 與 否 依 賴 感 測 器 的 性 能 跟 誤 差 大 小,尤 其 是 像 超 音 波 對 於 反 射 面 的 角 度 跟 材 質 不同, 具 有 著 某 程 度 的 感 測 誤 差。 換 言 之, 當 機 器 人 在 一 個 未 知 的 環 境 移 動 時,感 測 器 所 得 的 環 境 資 訊 經 常 存 在 某 些 程 度 上 的 不 確 定 性,尤 其 是 對 於 使 用 距 離 感 測 器 作 為 環 境 感 測 的 機 器 人,其 對 環 境 感 測 的 輸 入 時 常 會 因 環 境 的 變 化 而 有 劇 烈 的 變 化。模 糊 控 制 針 對 具 有 不 確 定 的 性 的 資 訊 有 著 相 當 好 的 處 理 能 力,對 於 含 有 隱 藏 的 不 確 定 因 素 的 資 料 也 能 夠 有 很 好 的 效 能,所 以 使 用 模 糊 邏 輯 控 制(Fuzzy Logic Control,FLC)來 設 計 控 制 器 在 機 器 人 導 航 上 被 廣 泛 的 使 用。除 此 之 外,在 機 器 人 導 航 設 計 上 找 出 明 確 的 環 境 模 型 不 太 容 易,但 是 模 糊 邏 輯 控 制 透 過 其 對 於 不 確 定 的 資 料 的 良 好 處 理 能 力,也 能 對 此 問 題 進 行 處 理,使 得 不 需 透 過 精 確 的 環 境 模 型 亦 能 進 行 導 航 。 模 糊 邏 輯 是 典 型 的 多 値 邏 輯 , 容 許 資 料 融 合 的 不 確 定 性 直 接 在 推 論 過 程 中 表 示 , 以[0, 1]區 間 的 數 字 表 示 資 料 的 參 與 度 (Membership),模 糊 邏 輯 控 制 乃 是 根 據 模 糊 集 合 理 論 將 人 們 的 經 驗 與 直 覺 表 達 為 模 糊 語 句(IF… THEN… ), 並 以 計 算 機 來 執 行 這 些 模 糊 規 則。與 傳 統 控 制 不 同 的 是,模 糊 控 制 並 非 單 純 將 邏 輯 二 分 化,而 是 可 以 直 接 訴 諸 於 人 類 的 直 覺 或 是 操 作 者 的 經 驗,將 原 本 的 只 有 0 或 1 邏 輯 判 斷,依 照 程 度 的 高 低 給 予 0 到 1 之 間 的 數 字 來 表 示,特 別 是 當 控 制 系 統 較 為 複 雜 時,模 糊 邏 輯 控 制 更 能 有 優 良 的 表 現,就 此 而 言,使 用 行 為 模 式 為 機 器 人 導 航 方 式 的 架 構 很 適 合 採 用 模 糊 控 制 來 處 理 行 為 的 設 計。簡 言 之,模 糊 邏 輯 控 制 具 有 下 列 特 點 : 1. 不 需 要 知 道 控 制 對 象 的 數 學 模 型,FLC 為 一 種 語 言 控 制 器。 2. 能 實 現 對 於 非 線 性 系 統 的 控 制 。 3. 模 糊 控 制 對 於 參 數 的 變 化 具 有 很 強 的 適 應 性 。 模 糊 控 制 器 的 設 計 上 包 含 隸 屬 函 數(Membership Function)
與 推 論 法 則(Inference Rule)兩 大 部 分 。
2.2 閃 避 障 礙 物 行 為 (Obstacle avoidance)的 設 計
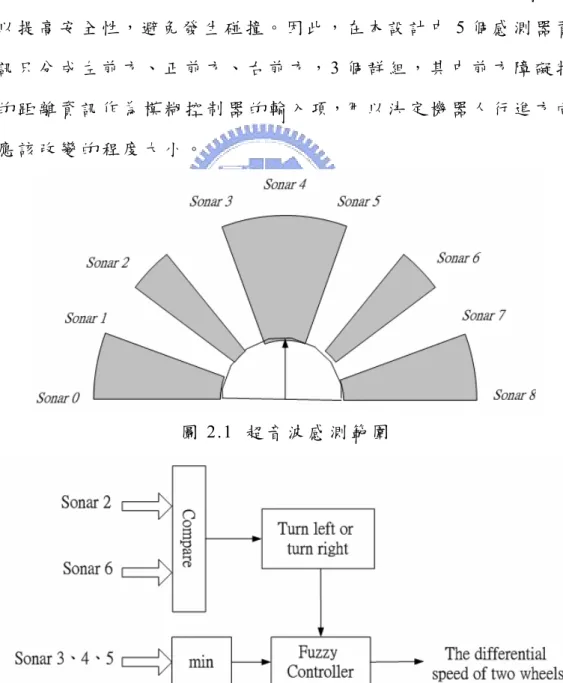
行 為 模 式 架 構 中 每 一 個 行 為 都 是 為 了 達 到 某 一 特 定 的 導 航 目 的。就 此 來 講,我 們 先 確 認 閃 避 障 礙 物 行 為 設 計 上 主 要 的 目 的 在 於 能 夠 使 機 器 人 避 開 障 礙 物 而 不 會 發 生 碰 撞。並 針 對 此 目 的 來 設 計 此 一 行 為 的 功 能,我 們 希 望 此 一 行 為 設 計 上 能 夠 帶 領 機 器 人 尋 找 出 即 時 且 較 好 的 閃 避 路 徑 來 閃 避 機 器 人 行 進 方 向 上 的 障 礙 物 。 閃 避 障 礙 物 行 為 設 計 所 使 用 之 超 音 波 感 測 距 離 資 訊 為 前 方 Sonar 與 左 右 兩 側 Sonar 共 5 個 超 音 波 距 離 資 訊 。 超 音 波 裝 設 位 置 如 圖 2.1 所 示 , 我 們 由 前 方 超 音 波 資 訊 (圖 2.1 編 號 3、 4、 5) 做 為 模 糊 控 制 器 的 輸 入 來 決 定 機 器 人 的 兩 輪 輸 出 的 速 度 修 正 值,亦 即 由 障 礙 物 與 機 器 人 的 距 離 來 決 定 機 器 人 改 變 行 進 方 向 的 程 度。當 在 目 前 行 進 方 向 上 的 障 礙 物 越 近 時,則 閃 避 行 為 需 要 較 大 的 動 作 才 能 閃 開,此 模 糊 控 制 器 的 設 計 將 詳 細 敘 述 於 後。而 左 前 方 與 右 前 方 的 距 離 資 訊 透 過 Sonar 2 及 Sonar 6 來 取 得 , 用 以 得 知 左 側 與 右 側 哪 邊 的 閃 避 空 間 較 大,來 判 定 機 器 人 該 往 左 邊 或 是 右 邊 來 避 開 目 前 行 進 方 向 上 的 障 礙。其 中 我 們 透 過 比 較 Sonar2 及 6 的 距 離 量 測 值 之 判 斷 的 條 件 是:如 果 偵 測 結 果 左 側 大 於 右 側 30 cm 以 上 , 則 旋 轉 方 向 向 左 , 否 則 旋 轉 方 向 向 右 , 如 此 設 定 的 原 因 是 為 了 提 早 確 定 旋 轉 的 方 向 。 當 前 方 障 礙 物 分 布 較 為 複 雜 時 , 可 能 機 器 人 剛 選 擇 右 轉 後 , 在 右 側 的 方 向 又 偵 測 到 障 礙 物 , 而 左 前 方 與 右 前 方 的 回 傳 值 所 判 斷 的 迴 轉 空 間 大 小 恰 好 與 前 一 個 命 令 相 反 , 造 成 機 器 人 會 忽 左 忽 右 的 擺 盪 , 為 了 減 少 這 種 情 況,所 以 設 計 上 我 們 多 給 了 30 cm 的 差 距 來 增 加 閃 避 障 礙 物 行 為表 現 的 穩 定 度。當 決 定 了 機 器 人 閃 避 障 礙 物 的 方 向 後,接 下 來 討 論 閃 避 障 礙 物 行 為 設 計 中 之 模 糊 控 制 器 部 分 。 閃 避 障 礙 物 的 行 為 設 計 其 流 程 可 以 用 圖 2.2 來 表 示 。 首 先 將 前 方 的 感 測 器 資 訊 加 以 分 組 對 於 左 前 方、右 前 方 各 使 用 一 個 感 測 器 , 以 偵 測 左 右 兩 側 的 空 間 , 來 決 定 機 器 人 之 迴 轉 的 方 向 ; 而 正 前 方 的 障 礙 物 資 訊 為 閃 避 障 礙 物 行 為 設 計 的 模 糊 控 制 器 輸 入,因 為 較 為 重 要,所 以 使 用 三 個 感 測 器 來 加 以 量 測,其 後 將 三 個 感 測 器 傳 回 的 値 取 其 最 小 值,做 為 閃 避 障 礙 物 的 行 為 控 制 器 的 輸 入 , 以 提 高 安 全 性,避 免 發 生 碰 撞。 因 此,在 本 設 計 中 5 個 感 測 器 資 訊 只 分 成 左 前 方 、 正 前 方 、 右 前 方 ,3 個 群 組 , 其 中 前 方 障 礙 物 的 距 離 資 訊 作 為 模 糊 控 制 器 的 輸 入 項,用 以 決 定 機 器 人 行 進 方 向 應 該 改 變 的 程 度 大 小 。 圖 2.1 超 音 波 感 測 範 圍 圖 2.2 閃 避 障 礙 物 決 策 流 程
對 於 前 方 輸 入 的 超 音 波 距 離 資 訊 作 為 模 糊 控 制 器 的 輸 入,模 糊 控 制 器 的 輸 出 部 分 為 兩 輪 的 速 度 修 正 值,因 為 我 們 假 設 在 直 線 前 進 時 機 器 人 具 有 一 線 速 度 vl,設 計 的 三 個 行 為 的 輸 出 項 目 都 只 是 為 了 改 變 機 器 人 的 行 進 方 向 , 例 如 : 當 圖 2.2 中 輸 出 的 兩 輪 速 度 修 正 值 為 vd i f 時 , 則 左 右 兩 輪 速 度 一 輪 為 vl+vd i f、 另 一 輪 為 vl-vd i f。本 章 所 設 計 模 糊 控 制 器 使 用 的 模 糊 規 則 可 表 示 為 圖 2.3。 在 此 模 糊 控 制 器 中 , 我 們 使 用 三 條 單 一 輸 入 的 簡 單 模 糊 控 制 規 則 , 這 三 條 規 則 如 下 : 其 中 input 部 分 為 前 方 輸 入 的 超 音 波 距 離 資 訊,output 為 左 右 兩 輪 與 機 器 人 本 身 直 線 前 進 時 的 線 速 度 的 差 值 。
1. If the distance from obstacle is close, then the differential speed is big.
2. If the distance from obstacle is medium, then differential speed is medium.
3. If the distance from obstacle is far, then the differential speed is small.
當 偵 測 到 機 器 人 目 前 行 進 方 向 上 正 前 方 的 障 礙 物 資 訊 距 離 較 近 時 , 為 了 閃 避 該 障 礙 物 , 機 器 人 應 該 採 取 較 大 的 旋 轉 動 作 , 也 就 是 讓 左 右 輪 的 速 度 差 較 大 來 得 到 較 快 的 轉 向,而 左 轉 或 是 又 轉 來 迴 避,則 透 過 左 前 方 與 右 前 方 的 感 測 器 資 訊 來 決 定;反 之 當 機 器 人 偵 測 到 的 障 礙 物 距 離 較 遠 時,機 器 人 只 需 慢 慢 改 變 行 進 方 向 來 進 行 閃 避 障 礙 物 的 動 作 即 可 。 上 述 閃 避 障 礙 物 行 為 的 設 計 規 則 , 我 們 將 其 歸 屬 函 數 以 圖 2.3 作 一 說 明 , 規 則 一 說 明 如 下 : 當 機 器 人 行 進 方 向 的 障 礙 物 距 離 少 於 50 cm 時 (close),兩 輪 的 速 度 與 直 線 前 進 時 機 器 人 的 速 度
圖 2.3 閃 避 障 礙 物 的 模 糊 控 制 器 輸 入 與 輸 出 歸 屬 函 數 圖 2.4 閃 避 障 礙 物 模 糊 控 制 器 輸 入 與 輸 出 關 係 圖 差 為 20 cm/s(big), 藉 此 機 器 人 取 得 較 大 的 轉 向 ; 當 障 礙 物 距 離 介 於 50~100 時 , 依 照 歸 屬 函 數 中 close 區 段 的 程 度 値 映 射 到 big 區 段 相 同 歸 屬 度 所 對 應 的 速 度 差 值。規 則 二、規 則 三 同 樣 如 圖 樣 2.3 所 示 。
由 歸 屬 函 數 中,透 過 簡 單 的 模 糊 推 論,我 們 獲 得 了 機 器 人 左 右 輪 速 度 與 直 線 前 進 時 的 線 速 度 差 的 絕 對 值,並 藉 以 改 變 機 器 人 前 進 的 方 向 , 在 圖 2.2 中 , 透 過 Sensor 2、 6 的 比 較 來 決 定 左 輪 與 右 輪 的 速 度 何 者 較 高、何 者 較 低,來 達 成 左 轉 或 右 轉 的 閃 避 障 礙 物 行 為 。
2.3 沿 牆 行 走 行 為 (Wall following)的 設 計
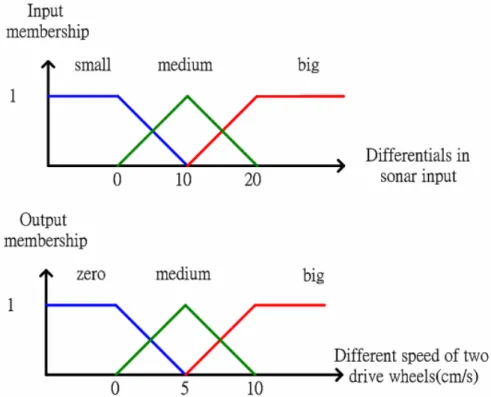
沿 牆 行 走 行 為 的 設 計 的 目 的 在 於 『 當 機 器 人 行 進 時 , 可 以 沿 著 環 境 的 邊 界 來 前 進 』, 這 個 命 題 可 能 包 含 更 多 動 作 , 像 是 對 於 牆 角 轉 角 處 的 應 對 或 是 當 環 境 更 加 不 規 則 時,一 樣 能 夠 沿 著 邊 界 前 進 。 在 相 關 論 文 中 , 這 個 命 題 的 處 理 , 是 將 一 個 behavior 再 予 以 分 解 成 多 個 action 來 加 以 完 成。目 前 我 們 的 主 題 的 重 點 在 於 說 明 我 們 所 提 出 的 融 合 方 式 是 否 有 效 , 我 們 簡 單 將 之 定 義 為 『 與 較 為 鄰 近 的 那 一 側 的 牆 壁 , 保 持 相 同 的 距 離 行 走 』, 在 這 個 目 的 下,我 們 需 要 的 資 訊 包 含 有 前 個 環 境 偵 測 週 期 中 機 器 人 的 左 側 與 右 側 的 距 離 資 訊 與 目 前 感 測 器 所 量 測 的 距 離 資 訊 ─ 經 圖 2.1 所 示 的 Sonar 0、 Sensor 1 跟 Sonar 7 及 Sensor 8 四 個 超 音 波 感 測 器 取 得,來 決 定 機 器 人 目 前 的 狀 態 較 上 個 週 期 時 是 較 為 遠 離 側 邊 的 牆 壁 或 是 更 為 靠 近。如 下 圖 2.4 所 示,當 機 器 人 在 位 置 A 原 方 向 前 進 會 使 得 左 側 距 離 牆 壁 較 近 的 感 測 器 前 後 兩 次 所 偵 測 的 距 離 値 增 加,當 遠 離 牆 壁 的 速 度 越 快 時,兩 次 偵 測 到 的 距 離 資 訊 其 差 值 也 相 對 應 增 加 越 多,以 此 為 輸 入,透 過 沿 牆 行 走 的 模 糊 控 制 器 調 整 方 向 , 達 成 沿 牆 行 走 的 目 的 , 如 圖 2.4 的 位 置 B 所 示 。 在 沿 牆 行 走 行 為 的 模 糊 控 制 器 的 設 定 上,我 們 將 輸 入 項 定 義 為 兩 次 量 測 到 的 距 離 資 訊 的 差 值 , 使 用 的 超 音 波 感 測 器 為 圖 2.1中 的 Sonar 0 與 Sensor 1 跟 Sonar 7 及 Sensor 8 作 為 wall sensor。 設 計 上,左 側 與 右 側 各 有 兩 個 超 音 波 感 測 器 讀 值 取 其 最 小 值,如 此 安 排 的 原 因 在 於 我 們 希 望 當 機 器 人 在 走 廊 上 行 走 時,對 於 小 小 的 走 廊 起 伏,依 然 能 夠 有 較 高 的 容 忍 度。當 兩 次 距 離 資 訊 的 超 音 波 感 測 器 傳 回 的 值 相 差 越 多 時,表 示 機 器 人 的 路 徑 與 前 次 相 比 偏 離 牆 壁 更 加 的 嚴 重,所 以 移 動 式 機 器 人 調 整 轉 向 的 幅 度 也 越 大 。 而 如 果 兩 側 傳 回 的 感 測 器 距 離 資 訊 相 同,表 示 機 器 人 目 前 正 沿 著 牆 壁 行 走 , 其 流 程 我 們 以 如 圖 2.5 表 示 , 當 接 收 到 兩 側 邊 的 超 音 波 感 測 器 資 訊 時,我 們 一 邊 各 自 取 其 最 小 值 判 斷 目 前 機 器 人 較 為 接 近 左 側 或 是 右 侧 的 牆 壁,較 為 貼 進 的 一 側,即 是 我 們 沿 牆 行 走 行 為 輸 出 時 所 靠 的 牆 壁,另 一 方 面,比 較 兩 側 偵 測 週 期 中 兩 次 障 礙 物 距 離 的 讀 値,並 計 算 其 差 值,作 為 沿 牆 行 走 模 糊 控 制 器 的 輸 入。我 們 所 設 計 的 模 糊 控 制 器 其 規 則 如 下:其 輸 入 與 輸 出 歸 屬 函 數 如 圖 2.6 所 示。input 定 義 為 兩 次 超 音 波 距 離 量 測 的 差 值,output 部 分 為 左 右 兩 輪 與 機 器 人 本 身 直 線 前 進 時 的 線 速 度 的 差 值 。
1. If the difference between two periods of detection is big, then the differential speed is big.
2. If the difference between two periods of detection is medium, then the differential speed is medium. 3. If the difference between two periods of detection is
small, then the differential speed is zero.
由 歸 屬 函 數 中,透 過 簡 單 的 模 糊 推 論,我 們 獲 得 了 機 器 人 左 右 輪 速 度 與 直 線 前 進 時 的 線 速 度 差 的 絕 對 值,並 藉 以 改 變 機 器 人 前 進 的 方 向 , 在 圖 2.6 中 我 們 對 模 糊 控 制 器 的 做 一 說 明 , 透 過 左 側 與 右 侧 兩 組 超 音 波 在 兩 次 偵 測 週 期 中 回 傳 値 的 差 值,來 決 定 機
器 人 目 前 前 進 的 方 向 改 變 的 程 度 。 當 兩 次 偵 測 的 距 離 差 值 越 大 時,表 示 目 前 機 器 人 遠 離 牆 壁 的 速 度 較 快,所 以 機 器 人 需 要 較 大 的 轉 向 來 與 牆 壁 平 行 前 進 。
圖 2.5 沿 牆 行 走 行 為 設 計 示 意 圖
圖 2.7 沿 牆 行 走 行 為 模 糊 控 制 器 的 設 計 輸 入 與 輸 出 歸 屬 函 數 圖 2.8 沿 牆 行 走 模 糊 控 制 器 輸 入 與 輸 出 關 係 圖
2.4 目 標 物 追 蹤 的 設 計
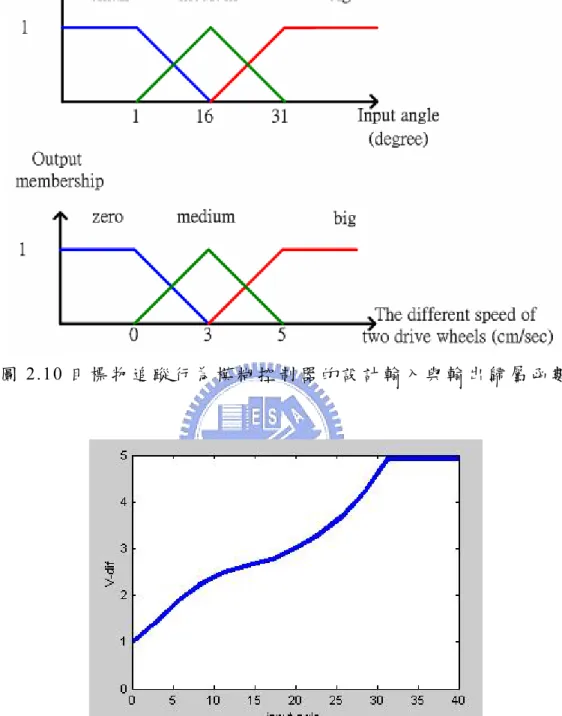
目 標 物 追 蹤 的 行 為 , 我 們 將 之 定 義 為 『 調 整 機 器 人 前 進 方 向 , 使 朝 目 標 物 所 在 方 向 前 進 』, 作 此 定 義 的 原 因 在 於 當 我 們 機 器 人 在 環 境 中 導 航 時,為 了 閃 避 障 礙 物 或 是 沿 牆 走 訪 邊 界 時 可 能 偏 離 目 標 物 的 方 向,我 們 希 望 在 偏 離 之 後 能 夠 讓 機 器 人 回 到 原 本 的 方 向 上 , 使 其 朝 向 目 標 物 所 在 位 置 前 進 , 最 後 才 能 到 達 目 的地。設 計 上 其 模 糊 控 制 器 的 輸 入 項 為 機 器 人 行 進 方 向 與 目 標 物 的 夾 角 θ,輸 出 項 則 為 左 右 輪 的 速 度 修 正 值,用 來 改 變 機 器 人 行 進 的 方 向,使 其 朝 向 目 標 物 所 在 位 置 前 進。因 為 機 器 人 已 先 設 定 有 一 基 本 的 線 速 度 直 線 前 進,目 標 物 追 蹤 設 計 輸 出 為 透 過 改 變 左 右 論 速 度 來 使 機 器 人 行 進 方 向 朝 向 目 標 物 的 所 在 方 向。由 圖 2.7 可 知,將 機 器 人 前 進 方 向 與 目 標 物 方 向 上 的 夾 角 作 為 目 標 物 追 蹤 此 一 行 為 的 輸 入 項,如 果 該 夾 角 為 零,表 示 機 器 人 正 朝 向 目 標 物 所 在 的 方 向 前 進,若 不 是 的 話,則 機 器 人 前 進 方 向 與 目 標 物 方 向 間 存 在 一 個 夾 角 θ,在 此 我 們 定 義 在 機 器 人 與 目 標 物 的 連 線 與 機 器 人 目 前 行 進 方 向 之 間,若 目 標 物 在 目 前 機 器 人 行 進 方 向 的 右 邊 , 則 θ 定 義 為 正 ; 反 之 則 定 義 為 負 。 模 糊 控 制 器 的 輸 出 為 一 絕 對 值,用 以 表 示 左 右 輪 速 度 與 機 器 人 直 線 前 進 時 的 線 速 度 差 值,作 為 左 輪 與 右 輪 速 度 增 加 或 減 少 的 値。如 果 θ 越 大,則 表 示 偏 離 目 標 物 方 向 越 遠,所 以 機 器 人 必 須 改 變 其 前 進 方 向 幅 度 較 大,才 能 使 之 朝 向 目 的 地 。 如 圖 2.7 中 所 示 , 為 目 標 物 追 蹤 的 行 為 表 現 圖 形,當 目 標 物 追 蹤 行 為 發 生 時,目 標 位 方 向 與 機 器 人 前 進 方 向 的 夾 角 越 來 越 小。對 於 此 一 行 為,我 們 設 計 一 模 糊 控 制 器 其 歸 屬 含 數 如 下 圖 2.8 所 示 。 其 規 則 如 下 , 其 中 input 為 機 器 人 前 進 方 向 與 目 標 物 方 向 上 的 夾 角θ, output 為 左 右 兩 輪 與 機 器 人 本 身 直 線 前 進 時 的 線 速 度 的 差 值 。
1. If the angle to the target is big, then the differential speed is big. 2. If the angle to the target is medium,
then the differential speed is medium. 3. If the angle to the target is small,
當 機 器 人 目 前 行 進 的 方 向 與 目 標 物 的 所 在 方 位 差 距 在 31°以 上,機 器 人 旋 轉 改 變 行 進 方 向 的 程 度 也 隨 之 提 升,兩 輪 的 速 度 與 機 器 人 直 線 前 進 時 的 線 速 度 差 值 為 5 cm/s,當 目 標 物 在 行 進 方 向 的 左 方 時 , 機 器 人 須 向 左 轉 , 才 能 朝 目 標 物 前 進 , 所 以 右 輪 速 度 增 加 5 cm/s, 左 輪 速 度 減 少 5 cm/s; 當 θ 介 於 16°到 31°之 間 , 依 照 圖 2.8 輸 入 歸 屬 函 數 中 的 模 糊 推 論 , big 區 段 的 程 度 値 , 映 射 到 輸 出 歸 屬 函 數 中 big 區 段 相 同 歸 屬 度 所 對 應 的 速 度 差 值。規 則 二 、 規 則 三 同 樣 如 圖 樣 2.8 所 示 。 圖 2.9 目 標 物 追 蹤 行 為 設 計 示 意 圖
圖 2.10 目 標 物 追 蹤 行 為 模 糊 控 制 器 的 設 計 輸 入 與 輸 出 歸 屬 函 數
圖 2.11 目 標 物 追 蹤 型 為 模 糊 控 制 器 輸 入 與 輸 出 關 係 圖
2.5 結 論 與 討 論
目 前 設 計 的 三 個 行 為 模 式 都 較 為 簡 單,僅 是 為 達 成 所 預 設 的 導 航 目 的 而 設 計,所 以 模 糊 控 制 器 的 輸 入 輸 出 項 都 很 快 可 以 計 算
出 來,我 們 的 重 點 在 於 我 們 設 計 的 這 三 個 行 為,是 否 可 以 透 過 下 一 章 的 方 法 加 以 融 合,使 得 總 輸 出 結 果 符 合 我 們 所 需 要 的 導 航 行 為 。
第 三 章 行 為 融 合 的 設 計
以 行 為 架 構 來 進 行 的 機 器 人 在 導 航 的 設 計 上 , 如 果 有 相 似 的 環 境 感 測 輸 入,那 麼 同 樣 根 據 環 境 資 訊 來 進 行 動 作 的 個 別 行 為 在 類 似 環 境 之 下 行 為 融 合 輸 出 方 面 應 該 也 具 有 相 似 的 輸 出 比 例。根 據 這 個 假 設 之 下,我 們 將 超 音 波 所 測 得 的 環 境 資 訊 依 據 偵 測 方 向 與 距 離 加 以 量 化,使 其 成 為 一 個 有 序 的 數 列,來 代 表 一 個 環 境 資 訊 的 圖 樣。透 過 類 神 經 網 路 對 環 境 圖 樣 進 行 比 較,當 環 境 資 訊 的 圖 樣 相 似 時,那 麼 機 器 人 的 行 為 融 合 比 應 該 具 有 相 似 的 輸 出 。3.1 導 航 系 統 架 構
導 航 的 設 計 上 , 目 前 將 之 分 成 三 個 行 為 來 處 理 , 分 別 是 閃 避 障 礙 物(obstacle avoidance), 沿 牆 行 走 (wall following)及 目 標 物 追 蹤(goal seeking)。三 個 行 為 輸 入 項 分 別 是 超 音 波 感 測 資 訊 與 機 器 人 自 我 位 置 估 測 的 資 訊,輸 出 部 分 都 定 義 成 左 右 輪 的 速 度 與 機 器 人 直 線 前 進 時 的 線 速 度 差 距,目 的 在 於 改 變 機 器 人 前 進 的 方 向 。 機 器 人 本 身 已 經 先 給 予 一 個 線 速 度(10 cm/sec)在 , 若 三 個 行 為 都 沒 有 輸 出 的 話,機 器 人 會 直 接 地 往 前 行 走,而 三 個 行 為 作 用 就 在 於 改 變 移 動 式 機 器 人 的 行 進 方 向,來 完 成 閃 避 障 礙 物、沿 牆 行 走、目 標 物 追 蹤 等 工 作。三 個 行 為 依 其 需 求 各 自 從 機 器 人 前 半 部 的 9 個 超 音 波 感 測 器 與 自 我 位 置 估 測 的 資 訊 取 得 所 需 要 的 訊 息,而 後 通 過 模 糊 控 制 來 得 到 該 行 為 的 輸 出。最 後 由 本 章 所 設 計 的 融 合 機 制 針 對 該 時 刻 所 得 的 環 境 資 訊 求 得 三 個 行 為 的 融 合 比 例 , 如 圖 3.1、 3.2 所 示 。圖 3.1 導 航 任 務 行 為 融 合 的 設 計 圖 3.2 導 航 任 務 行 為 融 合 架 構
3.2 導 航 行 為 融 合 的 設 計
依 據 『 相 似 環 境 之 下 , 機 器 人 的 行 為 融 合 比 重 應 該 接 近 』 的 假 設 , 我 們 將 設 計 一 個 機 制 來 比 較 輸 入 的 環 境 感 測 數 列(代 表 此 時 機 器 人 所 處 的 環 境)與 預 先 已 給 定 行 為 融 合 比 例 的 環 境 圖 樣 的 相 似 程 度 ─ 預 設 的 環 境 圖 樣,稱 為 典 型 圖 樣,用 來 表 示 機 器 人 在 導 航 過 程 中 遭 遇 某 些 較 為 容 易 處 理 的 環 境 狀 況 時,其 融 和 比 例 亦 較 為 容 易 決 定。典 型 圖 樣 的 設 定 乃 是 因 為 在 機 器 人 導 航 前 進 時 所 面 對 的 環 境 狀 況 隨 時 在 變 化,具 有 許 多 可 能 的 環 境 類 型 可 能 發生,所 以 我 們 難 以 對 每 種 情 形 都 定 義 其 行 為 融 合 比 例,於 是 我 們 選 出 其 中 幾 種 較 有 明 顯 特 性 且 易 於 決 定 其 行 為 融 合 比 例 的 環 境 類 型 做 為 典 型 圖 樣 。
我 們 將 預 設 的 環 境 典 型 圖 樣 作 為 模 糊 分 類 網 路(Fuzzy Kohonen Clustering Network, FKCN)[18]架 構 中 input layer 到 distinct layer 的 鍵 結 值 , 另 以 所 設 定 之 融 合 比 例 做 為 該 典 型 圖 樣 所 對 應 的 行 為 融 合 值 ,FKCN 的 架 構 將 在 下 一 節 中 加 以 描 述 。 在 實 際 導 航 行 進 時,透 過 FKCN 網 路,我 們 在 網 路 的 最 末 端 獲 得 了 由 輸 入 的 環 境 資 訊 轉 換 成 的 圖 樣 與 典 型 圖 樣 之 間 的 相 似 程 度,當 與 某 一 典 型 圖 樣 相 似 程 度 越 高 時,表 示 輸 入 的 環 境 資 訊 與 該 典 型 圖 樣 所 表 示 的 環 境 越 接 近 , 則 輸 出 的 行 為 融 合 比 重 也 越 加 的 相 似。網 路 中 最 後 輸 出 的 融 合 比 例 即 是 透 過 對 於 各 典 型 圖 樣 相 似 程 度 乘 上 該 典 型 圖 樣 的 輸 出 比 例,將 之 加 總 而 得 到 在 該 環 境 之 下 的 行 為 融 合 比 例 , 見 圖 3.1。 如 此 一 來 , 融 和 比 例 便 可 直 接 由 環 境 感 測 資 訊 所 轉 換 成 圖 樣 而 產 生。在 此 我 們 注 意 到 網 路 中 的 鍵 結 值 並 非 經 由 FKCN 網 路 的 訓 練 方 式 得 到,對 此 我 們 做 一 說 明:當 輸 入 環 境 向 量 到 FKCN 網 路 時,首 先 會 計 算 輸 入 向 量 到 每 一 個 典 型 圖 樣 之 間 的 距 離(2-norm), 當 輸 入 向 量 與 典 型 圖 樣 差 異 越 大 時 , 距 離 層 輸 出 的 値 增 加 極 快,所 以 對 於 輸 入 的 環 境 向 量 與 典 型 圖 樣 差 異 越 大,會 明 顯 表 現 出 越 低 的 相 似 程 度,且 作 為 典 型 圖 樣 的 向 量 彼 此 之 間 具 有 相 當 的 差 異 程 度。所 以 當 一 般 化 的 環 境 向 量 輸 入 時 , 透 過 FKCN 依 然 能 夠 加 以 分 類 。 單 一 行 為 的 設 計 上 , 採 用 第 二 章 之 三 個 模 糊 邏 輯 控 制 器 來 決 定 該 行 為 的 輸 出 , 包 含 閃 避 障 礙 物 、 沿 牆 行 走 、 目 標 物 追 蹤 三 個 行 為,最 後 透 過 由 FKCN 網 路 輸 出 的 相 似 程 度 計 算 而 來 的 三 個 行 為 的 融 合 比 例 作 為 三 個 行 為 最 後 輸 出 行 為 的 融 合 比 例 。
3.3 利 用 啟 發 式 網 路 歸 類 環 境 以 決 定 行 為 融 合 權 重
由 於 週 遭 環 境 影 響 機 器 人 運 動 行 為 , 所 以 此 處 利 用 FKCN對 於 環 境 加 以 辨 識 分 類,並 輸 出 針 對 於 此 時 環 境 所 應 採 取 的 輸 出 行 為 融 合 比 例 。 以 下 對 於 FKCN 的 網 路 架 構 我 們 將 作 一 說 明 : FKCN 原 本 是 應 用 於 圖 樣 分 類 與 辨 識 的 一 種 類 神 經 網 路 [18], 如 圖 3.2 所 示 。 沈 良 寰 [19]跟 黃 信 益 [20]曾 利 用 到 該 架 構 來 設 計 其 自 走 式 機 器 人 的 導 航 系 統 , 他 們 以 FKCN 直 接 控 制 機 器 人 的 速 度,本 文 利 用 FKCN 的 架 構 並 建 立 一 規 則 表,將 兩 者 結 合 成 一 個 啟 發 性 網 路,透 過 這 個 網 路 來 執 行 計 算 出 三 個 行 為 表 現 出 來 的 融 合 比 例。此 啟 發 性 網 路 的 輸 入 項 是 經 過 我 們 將 得 到 的 超 音 波 感 測 器 資 訊 予 以 量 化 後 所 產 生 的 數 列,輸 出 部 分 則 經 過 各 典 型 圖 樣 的 相 似 程 度 乘 上 在 各 典 型 圖 樣 下 其 預 設 的 融 合 比 例 得 到 該 環 境 資 訊 下 所 推 測 的 應 有 融 合 比 例。細 節 部 份 我 們 將 在 下 兩 小 節 予 以 說 明 。 圖 3.3 FKCN 網 路 架 構
3.3.1 Kohonen 模 糊 分 類 網 路
如 圖 3.3 所 示 , FKCN 是 一 種 非 監 督 式 學 習 (unsupervised learning)的 類 神 經 網 路 , 原 本 的 用 途 是 作 為 圖 樣 分 類 與 辨 識 。 圖 3.3 中 FKCN 的 架 構 中 , 一 共 分 成 三 層 , 不 同 層 之 間 的 神 經 元 (neuron)的 鏈 結 (linker)是 完 全 連 結 的 (fully connected)。 架 構 圖 中 , 最 下 面 的 一 層 是 輸 入 層 , 待 辨 識 的 圖 樣 由 此 輸 入 ; 第 二 層 是 距 離 層 ,負 責 計 算 輸 入 的 圖 樣 Xi與 典 型 圖 樣 Wj 之 間 的 距 離 , 也 就 是 相 異 程 度 di j; 第 三 層 是 歸 屬 層 , 負 責 計 算 輸 入 圖 樣 相 對 於 典 型 圖 樣 的 歸 屬 度 ui j, 亦 即 用 以 表 示 相 似 程 度 有 多 高 , 歸 屬 度 的 値 介 於 0 到 1 之 間,若 為 1 的 話,則 表 示 輸 入 圖 樣 與 某 典 型 圖 樣 完 全 一 致。其 中 對 於 輸 入 圖 樣 Xi 與 典 型 圖 樣 Wj 我 們 皆 用 有 序 向 量 加 以 表 示 。 典 型 圖 樣 是 透 過 學 習 法 則 不 斷 訓 練 得 到 的,以 下 是 FKCN 的 學 習 法 則 : 步 驟 一 : 隨 機 地 設 定 初 始 鍵 結 值 Wj; 設 定 鄰 域 大 小(NE)為 c/2, c 是 輸 出 神 經 元 的 數 目 ; 設 定 鍵 結 值 更 新 量 △ Wj 為 0; 設 定 學 習 速 率 η 介 於 0 到 1 之 間 的 値 。 步 驟 二 : 輸 入 訓 練 圖 樣 Xj, 計 算 每 一 個 距 離 di j,di j的 定 義 如 式 (3-1): ) ( ) ( || || 2 j i T j i j i ij X W X W X W d = − = − − (3-1) 再 計 算 每 一 個 歸 屬 度 ui j,ui j 的 定 義 如 式(3-2)跟 式 (3-3) ⎩ ⎨ ⎧ − ≤ ≥ ≠ = = = ) 1 , 0 , 0 ( , 0 , 0 0 , 1 c j k k d if d if u ik ij ij (3-2) c 等 於 典 型 圖 樣 的 數 目 。 否 則
1 1 0 − − = ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ =
∑
c l il ij ij d d u (3-3) 步 驟 三 : 對 於 每 一 個 輸 入 圖 樣 , 選 擇 一 個 輸 出 神 經 元 j*, (0≦ j* ≦c-1), 使 得 di j=min(di 1,di 2,di ( c - 1 )), 再 根 據 式 3-4 跟 3-5 更 新 鍵 結 值 Wj。 j j j k W k W W ( )= ( −1)+η×∆ ,k: the kth state (3-4) ) ( ) 1 ( ) ( j ij i j j k W k u X W W =∆ − + × − ∆ (3-5) 在 此,j 包 含 輸 出 神 經 元 j*與 其 鄰 域 (NE)中 的 每 一 神 經 元 。 重 複 步 驟 二 跟 步 驟 三 , 直 到 Wj 不 改 變 。 步 驟 四 : 如 果 NE=0, 那 即 表 示 訓 練 過 程 完 成 , 否 則 NE=NE-1, 回 到 步 驟 二 繼 續 訓 練 。 此 學 習 法 則 的 目 的,就 是 要 將 所 有 被 訓 練 的 圖 樣 加 以 分 類 , 當 訓 練 完 成 後 , 鍵 結 值 Wj 則 代 表 第 j 類 的 典 型 圖 樣 。 典 型 圖 樣 決 定 之 後 便 可 以 進 行 圖 樣 辨 識 的 工 作,辨 識 的 方 法 就 是 執 行 學 習 法 則 的 步 驟 二 。 式 子 3-3 源 自 於 Bezdek 所 發 展 的 疊 代 法 則,式 中 的 總 和 等 於 1, 其 簡 要 證 明 如 下 : 1 1 0 1 0 − − = − =∑ ∑
⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ c j c l il ij d d (3-6) il il i il i il il i i i i i il i i i i i d d d d d d d d d d d d d d d d d d + + + + + + + + + + + + = ... 1 ... ... 1 ... 1 1 0 1 1 1 0 1 0 1 0 0 0 ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + + + × + + + = il i i il i i d d d d d d 1 ... 1 1 1 ... 1 1 1 1 0 1 0 = 1 (3-7)利 用 此 點 , 我 們 使 三 個 行 為 在 任 何 環 境 下 輸 出 的 融 合 比 例 總 和 都 是 1。經 過 相 似 度 乘 上 各 典 型 圖 樣 的 預 設 行 為 融 合 比 例 之 後 , 其 輸 出 的 總 行 為 融 合 比 例 依 然 等 於 1。 所 以 融 合 比 例 相 對 之 間 的 數 值 等 於 存 在 有 正 規 化 的 意 義 。
3.3.2 啟 發 性 網 路 ─ 結 合 FKCN 與 規 則 表
圖3.4 是 我 們 利 用 FKCN 網 路 所 設 計 出 來 的 行 為 融 合 啟 發 性 網 路 架 構。圖 中 的 下 半 部 結 構 就 是 我 們 前 一 小 節 所 講 的 FKCN 的 架 構 , 用 以 作 圖 樣 的 辨 識 , 計 算 輸 入 圖 樣 與 典 型 圖 樣 的 相 似 程 度;上 半 部 則 包 含 我 們 所 設 計 的 規 則 表 跟 定 義 出 來 的 目 標 方 位 , 用 以 計 算 對 應 於 輸 入 的 環 境 訊 息 所 應 產 生 的 行 為 融 合 比 重 。 在 本 論 文 中 , 我 們 所 使 用 來 探 測 環 境 資 訊 的 是 超 音 波 感 測 器,用 以 量 測 環 繞 機 器 人 運 動 時 周 遭 的 距 離 資 訊,超 音 波 感 測 器 在 機 器 人 上 共 裝 置 了 12 個 , 前 半 部 9 個 , 後 半 部 由 3 個 負 責 , 根 據 我 們 的 需 求 只 使 用 前 方 的 9 個 超 音 波 感 測 器 資 訊,其 分 布 如 圖 3.5 所 示 。 對 於 我 們 所 使 用 的 正 前 方 9 個 感 測 器 資 訊 , 設 計 上 我 們 將 之 分 成 5 組,分 別 表 示 左 右 兩 側,左 前 跟 右 前 方 還 有 正 前 方 的 資 訊 , 如 圖 3.5 所 示 。 我 們 依 照 超 音 波 感 測 器 偵 測 而 得 的 資 訊 按 照 由 左 至 右 的 順 序 寫 成 一 個 有 序 的 向 量,此 一 向 量 內 包 含 的 元 素 總 共 有 5 個 , 依 序 為 左 側 、 左 前 方 、 正 前 方 、 右 側 、 右 前 方 , 藉 以 表 示 此 時 的 環 境 資 訊 , 尤 其 要 說 明 的 是 我 們 收 到 的 超 音 波 共 有 9 個, 在 分 組 的 過 程 中, 同 一 組 只 取 其 最 小 值,要 如 此 做 的 原 因 在 於 我 們 希 望 在 同 一 個 方 向 內 我 們 所 得 的 距 離 能 夠 有 一 個 較 安 全 的 讀 値 , 以 免 機 器 人 在 反 應 時 發 生 危 險 。圖 3.4 行 為 融 合 啟 發 性 網 路
圖 3.5 超 音 波 偵 測 方 向
Front-Sonar:min(Sensor[3,4,5])
Front-left:Sonar[2];Front-right:Sonar[6]
依 上 述 設 定 , 超 音 波 在 不 同 的 環 境 下 都 可 以 取 得 一 組 不 同 的 感 測 向 量 :
{
g1,g2,g3,g4,g5}
lj = (3-8) gi 為 第 i 組 感 測 器 的 讀 値 , 而 lj 則 為 我 們 網 路 中 的 輸 入 向 量, 代 表 此 時 我 們 的 環 境 資 訊, 根 據 環 境 辨 識 的 概 念,我 們 將 每 一 個 感 測 向 量 都 視 為 一 個 圖 樣。因 此 在 不 同 的 特 定 環 境 中 我 們 便 可 以 得 到 不 同 的 特 定 圖 樣,以 一 個 有 序 向 量 加 以 表 示;此 外 針 對 某 些 具 有 較 有 明 顯 特 性 且 易 於 決 定 其 行 為 融 合 比 例 的 環 境 類 型 做 為 典 型 圖 樣。此 特 定 圖 樣 就 是 指 對 應 於 特 定 環 境 類 型 的 典 型 圖 樣 , 亦 即 我 們 在 FKCN 網 路 中 所 指 定 的 鍵 結 值 Wj, 相 對 於 原 本 FKCN 的 設 計 , 在 此 我 們 的 鍵 結 值 改 由 以 指 定 方 式 得 到 , 而 非 透 過 其 訓 練 法 則 , 理 由 說 明 如 下 。 就 FKCN 的 訓 練 法 則 而 言 , 前 提 是 需 要 有 大 量 的 資 料 來 完 成 整 個 訓 練 , 且 在 訓 練 過 程 中 需 要 計 算 測 試 點 與 典 型 圖 樣 的 距 離,然 後 再 計 算 典 型 圖 樣 的 變 動 以 做 為 訓 練 停 止 的 條 件。就 此 而 言,與 我 們 需 求 有 部 分 的 不 同,因 為 我 們 只 是 需 要 FKCN 這 樣 的 網 路 架 構 來 幫 助 我 們 做 辨 識 的 工 作,對 於 典 型 圖 樣 的 分 類 樣 式 與 數 目 並 不 需 要 對 所 有 可 能 的 結 果 做 分 析。所 以 我 們 直 接 用 指 定 的 方 式,透 過 我 們 對 於 較 具 有 代 表 性 的 環 境 類 型 跟 行 為 融 合 的 結 果 明 顯 的 環 境 資 訊 將 其 列 為 主 要 的 類 別,作 為 我 們 典 型 圖 樣 的 設 定 即 可。所 指 定 的 典 型 圖 樣 內 其 行 為 融 合 比 例 的 設 定 值 是 由 我 們 先 予 以 設 定 初 值,再 經 由 不 斷 的 模 擬 去 修 改 其 值 使 其 能 表 現 良 好 , 最 後 在 實 驗 過 程 中 加 以 驗 證 來 產 生 。 當 典 型 圖 樣 設 定 完 成 後 , 我 們 將 之 指 定 為 FKCN 架 構 中 第 一 層 輸 入 層 到 第 二 層 距 離 層 的 鍵 結 值 , 在 距 離 層 我 們 利 用(3-1)式 來 計 算 輸 入 的 圖 樣 Xi 和 每 一 個 典 型 圖 樣 Wj 之 間 的 差 距 di j。 (3-1) 式 是 一 個 2-範 數 (2-Norm)的 方 程 式 , 當 差 異 越 大 時 , di j會 快 速 增 加。如 果 di j等 於 零,表 示 輸 入 圖 樣 與 典 型 圖 樣 完 全 相 同 。 在 FKCN 架 構 中 最 上 層 的 歸 屬 層 部 份,我 們 利 用 (3-2)與 (3-3) 式 將 輸 入 圖 樣 Xi 跟 每 個 典 型 圖 樣 Wj 之 間 的 距 離 映 射 成 歸 屬 度 ui j。 歸 屬 度 以 到 之 間 的 値 表 示 , 當 其 值 越 大 表 示 相 似 程 度 越 高 。 毎 一 個 典 型 圖 樣 都 代 表 某 一 環 境 類 型 , 根 據 此 一 環 境 類 型, 我 們 給 予 配 置 當 此 之 時 的 行 為 融 合 權 重,也 就 是 說,事 先 我 們 要 建 立 一 規 則 表。毎 一 條 規 則 的 IF-PART 是 典 型 圖 樣 與 目 標 方 位 ;THEN-PART 是 參 考 的 行 為 融 合 比 例 。 規 則 的 數 目 等 於 典 型 圖 樣 的 個 數 。 歸 屬 度 ui j代 表 輸 入 圖 樣 Xi與 典 型 圖 樣 Wj的 相 似 度,由(3-7) 式 的 証 明 , 可 知 全 部 規 則 的 總 激 發 量 等 於 1。 最 後 決 定 行 為 輸 出 融 合 比 例 的,恰 等 於 每 一 個 典 型 圖 樣 的 激 發 量 乘 上 其 參 考 的 典 型 圖 樣 所 屬 的 行 為 融 合 比 例 , 其 總 和 也 等 於 1。
3.4 網 路 輸 入 : 感 測 器 與 目 標 方 向 的 量 化
依 前 所 述 , 我 們 將 正 前 方 的 超 音 波 資 訊 分 為 5 組 , 得 到 一 個 有 序 向 量 作 為 啟 發 性 網 路 的 輸 入,機 器 人 前 半 部 環 境 的 9 個 超 音 波 感 測 器 被 分 為 5 組 如 圖 3.4 所 示,其 中 第 2 組 跟 第 4 組 分 別 負 責 左 前 方 跟 右 前 方 各 有 一 個 超 音 波 感 測 器 來 偵 測;為 於 兩 側 部 份 的 第 1、 第 5 組 則 各 有 兩 個 , 當 偵 測 時 兩 側 的 超 音 波 資 訊 取 其 最 小 值,避 免 感 測 器 誤 差 的 發 生;正 前 方 部 份 的 偵 測 則 由 三 個 超 音 波 來 負 責,傳 回 的 距 離 訊 息 一 樣 取 其 最 小 值 作 為 環 境 向 量 的 輸 入 項。如 此 一 來 已 知 各 組 之 內 的 超 音 波 感 測 器 都 會 取 其 最 小 感 測值 作 為 該 組 的 代 表 値,得 到 的 這 5 個 數 據 分 別 表 示 移 動 式 機 器 人 的 左 側 、 左 前 、 正 前 方 、 右 前 、 右 側 這 五 個 方 向 的 障 礙 物 距 離 資 訊。這 五 個 值 在 轉 為 一 有 序 向 量 輸 入 啟 發 性 網 路 前,我 們 使 其 先 經 一 量 化 的 處 理。第 1、2、4、5 組 的 値 根 據 下 面 (3-9)式 作 量 化 , 在 量 化 之 時,我 們 對 於 障 礙 物 距 離 小 於 90 cm 跟 障 礙 物 距 離 大 於 270 cm 的 部 分 , 分 別 都 視 作 極 近 與 極 遠 , 當 傳 回 資 訊 介 於 這 兩 種 範 圍 內 時,都 只 以 1 跟 4 來 表 示。至 於 障 礙 物 距 離 資 訊 在 兩 者 之 間 的 , 我 們 分 別 以 1 到 4 之 間 的 數 來 表 示 。 ⎪ ⎪ ⎪ ⎩ ⎪⎪ ⎪ ⎨ ⎧ > ≤ < − + ≤ < − + ≤ < − + ≤ ≤ = 270 4 270 210 60 / ) 210 ( 3 210 150 60 / ) 150 ( 2 150 90 60 / ) 90 ( 1 90 0 1 i i i i i i i i i d for d for d d for d d for d d for x (3-9) di表 示 第 i 組 的 感 測 值 , i 等 於 1、 2、 4、 5 第 3 組 中 代 表 正 前 方 的 障 礙 物 距 離 , 由 於 正 好 在 機 器 人 的 前 進 方 向 上,為 了 可 以 即 時 閃 避 障 礙 物,所 以 對 於 歸 類 為 較 近 的 距 離 部 份 有 必 要 拉 長 , 於 是 我 們 視 障 礙 物 距 離 120 cm 以 內 的 都 當 距 離 1 處 理 , 而 障 礙 物 距 離 300 cm 以 上 的 都 當 作 4。 兩 者 之 間 的 距 離 輸 入 則 以 1 到 4 之 間 的 數 字 表 示。第 三 組 感 測 數 值 根 據 (3-10)式 作 量 化 。 ⎪ ⎪ ⎪ ⎩ ⎪⎪ ⎪ ⎨ ⎧ > ≤ < − + ≤ < − + ≤ < − + ≤ ≤ = 300 4 300 240 60 / ) 240 ( 3 240 180 60 / ) 180 ( 2 180 120 60 / ) 120 ( 1 120 0 1 i i i i i i i i i d for d for d d for d d for d d for x (3-10) di表 示 第 i 組 的 感 測 值 , i 等 於 3
在 量 化 的 等 級 上,如 果 量 化 的 等 級 太 多 會 增 加 規 則 表 上 構 建 的 困 難 度 , 反 之 , 若 量 化 的 等 級 太 小 , 則 無 法 明 確 表 達 出 環 境 類 型。所 以 我 們 在 量 化 等 級 上 只 有 區 分 成 1 到 4 級,分 別 表 示 極 近、 稍 近 、 稍 遠 、 極 遠 , 而 處 於 極 近 跟 極 遠 之 間 我 們 使 用 介 於 1 到 4 之 間 的 數 字 , 包 含 小 數 來 代 表 , 是 為 了 増 加 解 析 度 , 使 得 在 計 算 差 異 度 與 相 似 程 度 時 能 較 為 仔 細 。 同 時 , 規 則 表 中 另 一 輸 入 ─ 目 標 方 向 也 要 予 以 量 化 。 量 化 的 理 由 說 明 如 下:我 們 考 慮 的 是 FKCN 的 環 境 圖 樣 的 典 型 圖 樣 中 對 於 目 標 所 在 方 向 是 否 與 行 為 具 有 相 關 性:舉 例 如 下:就 障 礙 物 迴 避 而 言 , 如 果 障 礙 物 在 右 側 , 而 目 標 位 於 正 前 方 的 方 向 , 此 時 障 礙 物 迴 避 的 動 作 實 屬 多 餘,那 這 個 時 候,障 礙 物 迴 避 應 如 何 表 現 行 為 的 輸 出 呢 。 這 麼 說 好 了 ,『 假 設 目 標 物 的 方 向 與 我 們 如 何 迴 避 此 一 障 礙 物 的 方 式 有 關 』。 所 以 在 建 立 FKCN 的 典 型 圖 樣 時 將 目 標 物 所 在 的 方 向 列 為 參 數 之 一。所 謂 目 標 方 向,我 們 將 之 定 義 成 目 標 點 的 位 置 相 對 於 目 前 移 動 式 機 器 人 的 正 前 方 的 方 向。我 們 將 目 標 方 向 分 割 成 五 個 範 圍 , 如 圖 3.6 所 示 。 以 方 程 式 (3-11) 表 示 於 下:式 中φ是 目 標 方 向 值 與 機 器 人 目 前 行 進 方 向 上 的 夾 角。 ⎪ ⎪ ⎪ ⎩ ⎪⎪ ⎪ ⎨ ⎧ < ≤ < ≤ < ≤ < ≤ ≤ ≤ = -180 90 -for 5 -90 30 for 4 30 30 -for 3 90 30 for 2 180 90 for 1 φ φ φ φ φ dir (3-11)
Direction 1 Direction 2 Direction 3 Direction 4 Direction 5 圖 3.6 目 標 方 向 區 分 示 意 圖
3.5 典 型 圖 樣 與 規 則 表 的 建 立
FKCN 網 路 中 典 型 圖 樣 的 設 定 即 是 我 們 將 較 具 有 明 顯 特 性 且 易 於 決 定 其 行 為 融 合 比 例 的 環 境 資 訊 所 對 應 的 行 為 融 和 比 重 加 以 列 入,依 據 可 能 的 數 種 情 況 分 別 預 估 出 在 該 環 境 下 移 動 式 機 器 人 行 為 融 和 比 重,並 將 之 建 成 一 張 規 則 表。規 則 表 是 依 據 移 動 式 機 器 人 所 在 的 環 境 類 型 而 設 計 的。我 們 考 慮 的 規 則 表 中,共 含 有 八 種 環 境 類 型 , 如 圖 3.7 所 示 。 當 然 , 在 機 器 人 實 際 在 環 境 中 移 動 時 所 面 對 的 環 境 類 型 絕 對 不 止 這 八 種,然 而 只 要 我 們 將 這 八 種 環 境 圖 樣 加 以 模 糊 化 就 可 以 用 來 應 付 其 他 我 們 未 予 考 慮 的 環 境 類 型,也 就 是 說 將 我 們 的 設 計 做 一 般 化 的 處 理,便 可 適 應 更 多 的 環 境 類 型,因 此 透 過 FKCN 的 架 構 我 們 只 需 建 立 少 數 的 典 型 圖 樣 跟 規 則 即 可 。 針 對 圖 3.7 作 為 典 型 圖 樣 的 設 定 , 並 利 用 啟 發 性 網 路 比 較 環 境 資 訊 與 典 型 圖 樣 的 相 似 度,我 們 將 其 流 程 說 明 如 下 : 在 圖 3.4 下 半 部 分 的 FKCN 的 架 構 圖,一 共 可 分 成 三 層,不 同 層 之 間 透 過 鍵 結 加 以 連 接 而 成。當 我 們 將 5 個 方 向 的 感 測 資 訊 作 為一 組『 感 測 向 量 』作 為 FKCN 的 輸 入 項。尤 其 要 說 明 的 是,第 一 層 到 第 二 層 之 間 的 鍵 結 值 我 們 以 指 定 的 方 式 來 決 定,即 是 將 我 們 典 型 圖 樣 的 8 組 向 量 作 為 鍵 結 值。透 過 FKCN 的 網 路 架 構,我 們 可 以 得 到 感 測 到 的 環 境 資 訊 與 我 們 原 本 設 定 的 典 型 圖 樣 那 個 圖 形 較 為 接 近 , 同 時 依 照 ─“對 於 相 似 的 環 境 感 測 結 果 , 應 有 相 似 的 行 為 輸 出 表 現”─ 這 一 推 論 得 到 三 個 行 為 之 間 的 融 合 比 例 。 FKCN 網 路 最 後 輸 出 的 部 份,是 輸 入 的 環 境 類 型 相 對 於 典 型 圖 樣 的 相 似 程 度,如 果 相 似 程 度 越 高,則 我 們 推 論 三 個 行 為 的 輸 出 應 該 越 接 近 原 本 最 相 似 的 典 型 圖 樣 的 輸 出。當 然,如 果 分 類 出 來 的 環 境 群 組 構 多 的 話,可 以 明 顯 對 應 到 所 發 生 的 各 個 環 境 輸 出,更 能 寫 實 地 反 映 週 遭 環 境 與 當 時 應 採 取 的 行 為 融 合 比 例 的 應 對 關 係 。 關 於 典 型 圖 樣 如 何 被 定 義 出 來 的 問 題,目 前 定 義 是 以 考 慮 三 種 行 為 在 什 麼 樣 的 環 境 資 訊 會 必 須 要 完 全 被 激 發 的 狀 態,藉 由 較 為 偏 向 某 一 單 一 行 為 被 激 發 到 最 高 融 和 比 例 時,作 為 移 動 式 機 器 人 融 合 的 基 本 典 型 圖 樣,如 此 一 來 對 於 其 他 較 為 不 明 顯 哪 個 動 作 應 該 被 完 全 輸 出 的 環 境 類 型,將 之 視 為 由 典 型 圖 樣 為 基 底 所 構 成 的 圖 樣 , 參 考 圖 3.8, 其 表 示 了 面 對 一 些 簡 單 環 境 時 移 動 式 機 器 人 的 行 為 輸 出 。 當 我 們 在 建 構 規 則 表 時 , 將 目 標 方 向 也 考 慮 進 去,因 為 目 標 所 在 方 向 與 行 為 具 有 相 關 性,透 過 對 於 目 標 方 向 的 量 化,我 們 得 到 了 表 3.1 五 個 目 標 方 向 上 之 典 型 圖 樣 行 為 融 合 規 則 表 。
(a) Avoid-obstacle (b) Goal-seeking (c) Wall-following (d) Follow-the-middle 圖 3.8 環 境 類 型 與 行 為 表 現 可 能 關 係 對 於 規 則 , 我 們 先 回 顧 量 化 距 離(3-9)與 (3-10)式 。 了 解 有 序 向 量 中 , 數 字 1 跟 4 分 別 代 表 的 距 離 遠 近,就 圖 3.7 之 A 為 例 , 由 圖 A 所 示 , 移 動 式 機 器 人 前 半 部 的 五 個 方 向 上 所 偵 測 到 的 障 礙 物 距 離 皆 為 4,這 表 示 移 動 式 機 器 人 的 周 圍,至 少 前 方 半 圓 270 cm 內 沒 有 障 礙 物 的 存 在 , 因 此 對 於 我 們 在 該 典 型 圖 樣 所 示 的 環 境 類 型 A 中 , 目 標 物 追 蹤 行 為 的 輸 出 比 重 佔 有 率 的 比 例 為 1。 因 其 沒 有 障 礙 物 需 要 迴 避 。 亦 無 牆 壁 可 供 沿 牆 行 走 的 行 為 來 作 用 , 在 我 們 所 建 立 的 規 則 表 中 表 格 3.1, 佔 有 的 比 例 依 序 為 : 目 標 物 追 蹤(簡 寫 為 Wg), 障 礙 物 迴 避 (簡 寫 為 Wo), 沿 牆 行 走 (簡 寫 為 Ww)。 由 圖 樣 B 與 C 表 示 的 是 分 別 為 左 側 與 右 側 存 在 障 礙 物 的 情 況 , 在 這 種 情 形 下 , 我 們 依 據 目 標 物 所 在 的 方 向 不 同 , 所 採 取 的 融 合 比 重 也 隨 之 改 變 。 對 於 圖 B 來 講 , 機 器 人 的 右 側 具 有 障 礙 物,在 這 種 情 況 下 假 設 目 標 物 在 左 側 的 情 況,則 對 於 右 側 的 障 礙