Design of Sampling and Transmission Rates
for Achieving Control and Communication Performance
in Networked Agent Systems'
Feng-Li Lian", John Yookb,
Paul Otanezc, Dawn Tilbury", James MoyneC
( a )
National Taiwan University,
( b ) Raytheon Electronic Systems,
( e )
The University of
Michigan
A b s t r a c t
When sensory and actuation agents in a control system are exchanging data through one common communi- cation medium, the sharing of communication band- width will induce unavoidable data latency and might degrade the control performance. In this paper, we analyze the performance of control actions over dis- tributed networks, and propose a design methodology of achieving control and communication performance in a networked agent system. In particular, we study the relationship between the sampling rates of a con- trol system, and the transmission rates of a commu- nication network, and then utilize an integrated net- worked control design chart t o help select design pa- rameters and visualize overall system performance at different sampling and transmission rates. Based on the design parameters selected, several estimation al- gorithms are also implemented to achieve both control and communication performance. Simulation studies are conducted in a network-and-control simulator to demonstrate the networked control systems character- istics investigated.
1 I n t r o d u c t i o n
When dealing with large-scale control applications, functional agents such as sensors, actuators, and con- trollers are usually spatially distributed. In order to achieve the overall goal of all tasks performed, it is necessary for all the agents to exchange their own in- formation through communication media. Hence, the mechanism of communicating information plays an im- portant role on the stability and performance of the control systems implemented over communication net- works. Typical examples of networked agent systems include Intelligent Transportation Systems (ITS)
,
Inte- grated Manufacturing Systems (IMS), Battlefield Man- agement Systems (BMS), etc.'This research was supported in part by the NSF Engineer- ing Research Center for Reconfigurable Machining Systems un- der t h e grant EEC95-92125, t h e DARPA-1x0 Mixed Initiative Control of Automa-teams Program, and t h e National Science Council, Taiwan, R O C , under t h e grant NSC 91-2213-E-002-133, Corresponding Author: Feng-Li Lian, Department of Electrical Engineering, National Taiwan University, Taipei 106, Taiwan.
Generally speaking, there are two types of data needed for control applications, namely, states and events. Typical state data are position, velocity, temperature, or pressure signals which are the raw information for any control applications. Agent design for the state- based systems is simple and straightforward. For ex- ample, the processing functionality a t sensors and ac- tuators is simply the conversion between electrical and mechanical worlds. However, due to the design simplic- ity, more communications are needed among agents. In a small-scaled and centralized system, it should be not a big problem. However, in a large-scaled or distributed system, the required communication load might de- grade the overall performance or destabilize the system if without further design consideration.
On the other hand, events could be the abstract infor- mation of detailed control actions. The line-change ma- neuver of one vehicle in ITS, the processing schedule of
one product in IMS, the formation change of unmanned vehicles in BMS are examples of events. Based on the event information received, each agent needs to first re- cover the original content of the abstract information, and then let local state-based controllers react upon it. The system performance mainly focuses on the logical correctness of events, and relies on the well-designed lo- cal controllers. In this case, the communication amount needed might be decreased, but the performance of a time-critical control applications might not be accept- able due to too many processing components between states and events.
In this paper, we focus on the analysis and design methodologies of state-based systems with time-critical applications. For satisfying both control and commu- nication performance, several design methodologies are adopted to generate proper control actions and save communication bandwidth. This paper consists six sec- tions, including the Introduction section. Section 2 de- scribes problem formulation. Section 3 discusses the
design methodology, including deadband control and state estimation. Section 4 outlines a network and con- trol simulator that is used to simulate communication networks as well as control actions. Section 5 presents an illustrative example of a networked two-agent sys-
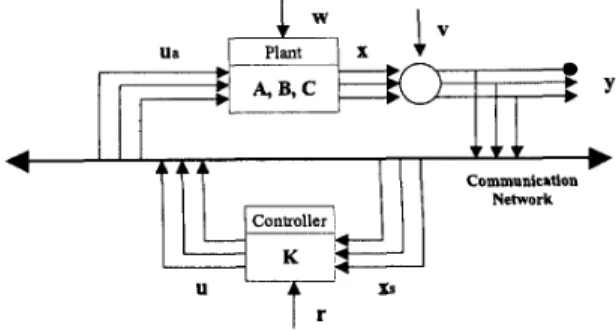
Figure 1: A standard MIMO closed-loop system.
tem. Summary and future work are provided in Sec- tion 6.
2 Problem Formulation
2.1 A standard MIMO system
In this paper, we consider a standard discrete- time, linear-time-invariant (LTI), multi-input-and- multi-output (MIMO) system with n states, rn inputs, and r outputs, shown in Fig. 1 and described as follows:
x ( k
+
1) = Ax(k)+
Bu(k)+
~ ( k )y(k) = C X ( k ) +v(k) (1)
where k is the time index associated with the sampling time T in discrete time domain. A E W n x n , B E Rnx", and C E EXrXn are system, input, and output matrices, respectively. w ( . ) and v ( . ) are system disturbance and
measurement noise, respectively, and are assumed to be bounded, i.e., w(.)
5 b, and
v(.)5
b, For easeof presentation, we assume that C =
I,
that is, all the states are measurable. The state feedback controller for system (1) can then be designed by any standard MIMO control design technique as follows:u(k) = Ke(k)
= K[r(k)
-
(x(k)+
V ( W l (2)That is, we assume the MIMO control system shown in Fig. 1 is well-designed. Hence, the system stability and performance of system (1) could be guaranteed by properly choosing the sampling time T in Eq. (2), and designing the state feedback gain K in Eq. (2). In this paper, we consider system dynamics (1) and controller design (2) as the baseline design framework.
2.2 A networked MIMO system
Next, we consider a distributed control architecture where sensors, actuators, and controllers are physically distributed and exchanging data through communica- tion networks as shown in Fig. 2. The advantages of using the distributed architecture include reducing sig- nificant wiring, sharing information, easily monitoring and diagnosing system health, etc. However, there are two key drawbacks with respect to time-critical con- trol applications. Each sampled data has an inevitable waiting time, i.e., time delay, because of the sharing of communication media. On the other hand, the fre- quency of information needed for a state-based control
Ua Plant x
*
I ; Y 4 Communicrtionc c c
b Network- L - *
Figure 2: A MIMO control system with communication of control signals over distributed networks.
system might consume too much network bandwidth or even saturate network traffic load. The situation of high bandwidth utilization might induce additional time delays, and further degrade the control perfor- mance.
If the data are sampled asynchronously and have trans- mission time delays, the system and controller dynam- ics a t the controller sampling instants can be modified as follows:
where xs(.) and U , ( . ) are the delayed version of x(.)
and U ( . ) , respectively. That is, for the i t h element of
x(.), zi((k) = z i ( k
-
si), and, for the j t h element ofU ( . ) , u i ( k ) = uj(k - a j ) , where si and ai are the sum of the transmission delays and mis-matched sampling instants of the sensory and actuation data, respectively.
A detailed discussion of the system analysis and con- troller design for the system with asynchronous and mismatched sampling instants can be found in [3, 51.
In this paper, we focus on the performance analysis of a standard MIMO controller in a networked control architecture and study the interaction between control and communication mechanism. Hence, the feedback controller and state estimator discussed in next section are assumed to be designed based on the system dy- namics (l), but evaluated based
on
the architecture of Fig. 2 and the framework of Eqs. ( 3 ) and (4).3 Design Methodology
When implementing a distributed MIMO control sys- tem over a network, one should study the network pro- tocols, evaluate the network performance, and under- stand the impact of data latency on control perfor- mance. In this section, we summarize the key char- acteristics of designing a networked control system in general. In particular, we discuss the network design considerations of network and control parameters in terms of networked control design chart. To achieve
Proceedings of the American Control Conference Denver, Colorado June 4-6, 2003 3330
worst
... ~ _...
slower t-- -L FaJler
SamplingtTransmission Rate
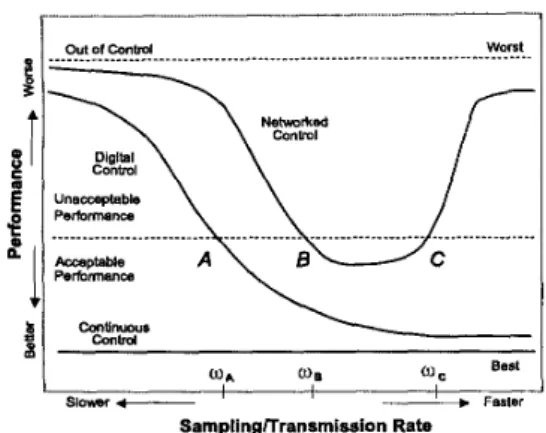
Figure 3: Performance comparison of continuous control, digital control, and networked control cases.
both the control and network performance under the limited communication bandwidth, we utilize state es- timator approaches t o actively adjust the communi- cation rates and guarantee designated control perfor- mance. In the end, an integrated network-and-control design chart will be used t o help visualize the overall system performance and select design parameters.
3.1 Network and control parameters
When selecting a communication network for control applications, two key questions related t o control per- formance are: how much time does one message need from the source agent to the destination agent, and how reliable the message transmission is. An in-depth performance evaluation of several popular control net- works can be found in [2] and a detailed analysis of these timing components can be found in [4]. Here, we summarize the results presented in the two references in terms of network and control parameters.
There are three important control parameters: the sampling rate, control system bandwidth, and phase margin that characterize control performance closely and have a strong influence on the network parame- ters. Since a networked agent system is essentially a discrete time system, choosing a proper sampling rate of sensing and actuation data is as important as that in the digital controller design. The sampling rate should depend on the control system bandwidth which is de- fined as the maximum frequency a t which the output a system will track an input sinusoid in a satisfactory manner. Due to the integral link between the network and control parameters, the selection of the best sam- pling rate is a compromise. In next section, we will discuss the construction of a networked control design chart which can be used t o visualize the interaction of network and control systems and help select proper design parameters.
3.2 Networked control design chart
During the implementation of one MIMO controller over a communication network, a design chart can be derived as shown in Fig. 3 [4]. This design chart pro- vides a clear way t o choose the proper sampling or transmission rates for a networked agent system. Fig. 3 is the comparison of control performance versus sam- pling rate for continuous control, digital control, and networked control. The worst, unacceptable, accept- able, and best regions can be defined based on required control system specifications such as overshoot, steady state error, and/or phase margin. The performance axis in Fig. 3 could be chosen to reflect a subset of these metrics.
Given a set of network and control parameters, several fundamental formulae are discussed in [4] t o character- ize the design chart. To guarantee the best control per- formance, all the agents need the newly updated data from other agents. Hence, all the scenarios considered in [4] are assumed t o have an identical sampling and transmission rate, that is, to transmit every sampled data to the destination agent. However, a faster sam- pling rate for guaranteeing good control performance might potentially saturate the network traffic load, and eventually increase the total transmission time and fur- ther degrade the control performance. Two adaptive approaches of decoupling the sampling and transmis- sion rates will be discussed in the next section. In the following, we first describe a revised network-and- control design chart of Fig. 3 that decouples the sam- pling and transmission rates.
The schematic view of a revised integrated network- and-control design chart is shown in Fig. 4. The two independent variables are sampling and transmission rates, and the control performance index could be cho- sen t o reflect a subset of control system specifications as described previously. The sampling rate is similarly selected based on the required control performance. However, the transmission rate is determined by the re- designed communication module at each agent. Based on a designated controller algorithm, the communica- tion module decides whether it needs t o broadcast the newly sampled data t o other agents or not. In Fig. 4(a), the red line is the case where the sampling rate equals the transmission rate, the blue line is the case where the transmission rate is only a half of the sampling rate, and the green line is the case of no transmission. The schematic view of the ratio of the sampling and trans- mission rates can be seen in Fig. 4(b). The lower-right region, i.e., transmission rate
>
sampling rate, is unde- fined because it will waste communication bandwidth if the number of message transmission is more than that of the sampled data. From Fig. 4(c), the side view of Fig. 4(a), it can be easily seen that, as the transmission rate decreases, the control performance degrades, but, the operating range of sampling rate becomes wider.Figure 4:
Therefore
(a) A schematic diagram of a revised network- and-control design chart. (b) the top view: the
C o r n Module C o r n Module
Figure 5: (a) A networked agent system with deadband- control communication module. (b) the schematic diagram of the communication mod- ule.
ratio of the sampling and transmission rates.
(cl the side view: the reduction of transmission
rate and control performance degradation.
Since an agent with deadband control adjusts its trans- mission rates based on its own state, the deadband control framework is only suitable for the system with slowly time-varying states such as manufacturing sys- tems] chemical processing plants. For highly dynami- by analyzing the required control specifica-
tion] we will study two communication control algo- rithms t o separately] adaptively adjust the sampling and transmission rates in Sections 3.3 and 3.4.
3.3 Using deadband control to decouple sam- pling and transmission rates
In this section, we discuss the implementation of a deadband controller framework] studied in [6] and adopted here for the proposed networked agent sys- tem. As shown in Fig. 5, the deadband control is im- plemented a t each individual agent such as sensor, ac- tuator, and controller. An agent with deadband control first compares the most recent state, says
xi,
to the last state xis sent t o the network. If the absolute value of the difference between xi and xis is within a deadband threshold, says hi, then no data is sent t o the network. Hence, agents with the deadband control communica- tion module can reduce transmission rates while main- taining acceptable control performance. Furthermore] it can be predicted that as the deadband threshold hi increases] the transmission rate decreases further and the control performance degrades as well. That is, for one networked control application, there might exist atrade-off between control and communication perfor- mance. Therefore] by properly selecting the deadband thresholds of all networked agents, an optimal perfor- mance of control and communication can be achieved.
cal systems and with strong performance requirements] the actual transmission rate might be ils much as one in
the networked MIMO case, and the deadband control framework dose not have much impact on the improve- ment of communication performance. In next section, we will further implement an estimator of the states of all networked agents and a modified communication module that adaptively adjusts the state transmission based on the actual and estimated states.
3.4 Using state estimator to decouple sampling and transmission rates
In this section, we discuss a state estimator framework studied in [7] and modify it for the proposed networked agent system. An example of a networked two-agent system with state estimator and communication mod- ule is shown in Fig. 6(a), and the schematic diagram of the Control/Comm module is depicted in Fig. 6(b). The basic idea is t o let one agent use estimated states for control actions and broadcast its current states t o other agents if estimation is not acceptable. The frame- work of state estimator and communication module is discussed in the following.
Next t o the agent is one estimator which computes the states of the agent and the other agents based on well- designed estimation models. The main functionality of
Proceedings of the American Control Conference
Subsystem 1 xlc Module f )U XIlrd)U/)US XI Communication Network Agent X2 and XI /XIS Subsystem 2
Figure 6: (a) A networked two-agent system with state estimator and communication module. (b) the schematic diagram of the communication mod-
ule.
the Control/Comm module is to compute the differ- ence of the true and estimated states of the agent, con- trol the communication frequency, and update the esti- mated states by the true states of other agents. For ex- ample, Estimator 1 in Fig. 6 computes x l e and xze and Estimator 2 computes x l e and x2, as well. At a normal
scenario, i.e., no communication required, Agent 1 is operating based on its own state x1 and the estiiiiatcd
state of Agent 2 , ~ 2When Control/Comm module ~ . 1 receives new x2, it informs Agent 1 to use the newly ar-
rived x2 instead of the estimated state xze. In addition,
Control/Comm module 1 broadcasts x1 to Agent 2 if
1x1 - x l e
I
is larger than a pre-defined threshold, say hl.Similar estimation and communication mechanisms are designed at Agent 2 or other agents.
For an n-agent system, there are n estimators of n states and n communication modules. Hence, the addi- tional computational complexity is n x n
+
n compared with the networked MIMO system. However, utilizing the locally estimated states can save certain amount of communication costlbandwidth and also achieve good control performance. In the worst case where the sys-m 1
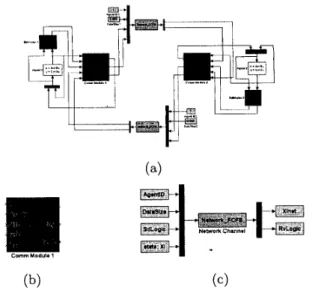
Figure 7: (a) An example of a networked two-agent sys-
tem, (b) The communication module, and (c)
The network channel.
tem is highly time-varying or the estimation perform poorly, the transmission rates of both the deadband- control and state-estimator cases are simply equal to that of the networked MIMO system. Hence, the im- plementation of the deadband control or state estima- tor locally can reduce the transmission rate, but guar- antee a acceptable control performance. On the other hand, the reduction of transmission rate save the avail- able communication bandwidth for other network us- ages and improve the overall performance of control and communication.
4 Network and Control Simulator (NCsim)
In this section, we discuss the development of a net- work and control simulator, called NCsim, on the Mat- lab/Simulink platform. In addition t o standard tool- boxes for controller design in Simulink, two key ele- ments in NCsim are network channel and communica- tion module.
An example of a networked two-agent system with state estimators is shown in Fig. 7(a) and the detailed dia- gram of the communication module and network chan- nel is depicted in Fig.7(b) and (c), respectively. The inputs from the agent to the communication module are the agent state (e.g., X I ) , and the estimated states (e.g., 2 1 , ~ ) . The outputs of the communication module to the network channel are the agent state ( z l n e t ) needed t o send and the sending interrupt (SdLogicl) to tell the network channel to transmit the current state ( z l n e t ) .
The inputs t o the network channel are the agent iden- tification number (AgentID), data size (Datasize)
,
and the sending interrupt and the current agent state for- warded from the communication module.Currently, there are two choices of network proto- cols: namely, the first-come-first-serve (FCFS) and the priority-based Controller Area Network (CAN). Based on the medium access control mechanism of the net- work protocols, the network channel then outputs the transmitted state ( x i n e t ) and the receiving interrupt (RvLogic) to notify the communication module of the receiving agent. The communication module then for- wards the transmitted state to the input of the receiv- ing agent. Note that, although there are two separate blocks of network channel in Fig. 7, they actually com- pete with the same network medium if one single net- work function (e.g., NetworkFCFS) is used. On the other hand, one can set up a networked agent system with multiple network channels by programming dif- ferent network functions such as “NetworkFCFSl” and
“NetworkFCFS2 .”
5 Illustrative Examples
In this section, we consider a system with two out- puts (i.e., states) and one input. Two separate esti- mators and communication modules are designed a t these outputs and three agents of two sensors and one actuator are programmed t o compete for the communi- cation bandwidth based on the priority-based network protocol. A simple ramp-type curve is used for ref- erence trajectory and the sum of time-weighted error between the reference trajectory and the actual tra- jectory is used as a performance index. The simula- tion result of the integrated design chart is shown in Fig. 8(a). These curves represent different threshold values; they are 0,0.02,0.05,0.1,oo for red, blue, pink, green, and black curves. As the threshold value in- creases, the control performance decreases, but the op- erating range becomes wider and the utilization of com- munication bandwidth reduces as shown in Fig. 8(b) and (c). Hence, from the simulation result, it can be seen that under the proposed networked agent frame- work, certain communication bandwidth can be saved and acceptable control performance can be guaranteed.
6 Summary and f u t u r e work
In this paper, we described the design methodologies for the networked agent systems t o achieve accept- able control and communication performance. The de- coupling of sampling and transmission mechanisms is done through deadband control and state estimation designed locally a t each agent. A network and control simulator with commutation modules as well control dynamics modules was also developed to help analyze the performance of proposed design schemes. The sim- ulation result showed the trade-off between control and communication performance. Hence, the future work includes characterizing their relationship precisely and designing adaptive threshold selector.
Figure 8: (a) Simulation result, (b) control performance
V.S. sampling rate, and (c) utilization of com-
munication bandwidth.
References
[l] G.F. Franklin, J.D. Powell, and M.L. Workman, Digital Control of Dynamic Systems, 3rd ed., Addison- Wesley, 1998.
[2] F.-L. Lian, J.R. Moyne, and D.M. Tilbury, “Per- formance Evaluation of Control Networks: Ethernet, ControlNet, and DeviceNet,” IEEE Control Systems Magazine, 21(1): 66-83, Feb. 2001.
[3] F.-L. Lian, J.R. Moyne, and D.M. Tilbury, “Analysis and Modeling of Networked Control Systems: MIMO Case with Multiple Time Delays,” 2001 ACC, Arlington, Virginia, June 25-27, 2001.
[4] F.-L. Lian, J.R. Moyne, and D.M. Tilbury, “Net- work Design Consideration for Distributed Control Systems,” IEEE Transaction on Control Systems Tech- nology, lO(2): 297-307, Mar. 2002.
[5] F.-L. Lian, J.R. Moyne, and D.M. Tilbury, “Op- timal Controller Design and Evaluation for a Class of Networked Control Systems with Distributed Constant Delays,” 2002 ACC, Anchorage, Alaska, May 8-10, 2002.
[6] P.G. Otanez, J.R. Moyne, and D.M. Tilbury, “Using Deadbands t o Reduce Communication in Net- worked Control Systems,” 2002 ACC, Anchorage, Alaska, May 8-10, 2002.
[7] J.K. Yook, D. Tilbury, H.S. Wong, and N.R. Soparkar, “Trading Computation for Bandwidth: St,ate Estimators for RedyFed Communication in Dis- tributed Control Systems, 2000 Japan- USA Sympo- sium on Flexible Automation, July 23-26, 2000.
Proceedings of the American Control Conference Denver, Colorado June 4-6, 2003