Proceedings of the 2004 IEEE
International Conference on Control Applications Taipei, Taiwan, September 2-4,2004
Control System Design for the PenduLIM:
a Novel Integrated Architecture of
Inverted Pendulum and Linear Induction Motor
Chi-Chun Cheng, Su-Chiun Wang, and Li-ChenFu,
Fellow,ZEEE
Absmcf-We propose an integrated control architecture for the ‘‘PenduLIM” which consists of an inverted pendulum (U’) mounted an a linear induction motor (LIM). According to this innovative architecture, the
IP
is swung up and stabilized to its upright unstable equilibria as well as the displacement is regulated to zero, by exerting horizontal thrust from the LIM. Inorder to cope with this highly nonlinear and unstable system, the IP is controlled via a passivilpbased enerSy controller coincides with a model-reference adaptive controller while the LIM is controlled via B thrust controller with secondary resistance adaptation. Then, by feeding the IP control law as command of LIM servo control subsystem, the overall closed-loop system is globally asymptotically stable ( A S ) in the sense of arbitrary initial displacement and angle. Finally, the success of proposed c o n t r ~ l scheme is demonseated by numerical simulations.
Index Tenns-PenduLIM, linear induction motor, inverted pendulum, passivity, hommlinic, model rererenee adaptive con- trol, secondary resistance adaptation. servo control
A S . DOF FOC HES
IM
rP
LIM LIST O F ACKoNYMs asymptotically stable degree of freedom field-oriented control Hall effect sensor induction motor inverted pendulum linear induction motorMRACmodel reference adaptive control PPC pole-placement control SIMO single-input multi-output
1. INTRODUCTION
NDERACTUATED mechanical control systems provide
U
a challenging research area of increasing interest in both application and 1heoly.h this paper, we will examine a class of underactuated mechanical systems and address problems in both nonlinear control design and integration. This research work will propose a passivity-based swing-up control and a novel adaptive control systems to deal with a special case of such underactuated nonlinear system-the PenduLIM.Since the late 1970% the dynamics and control of IPS have attracted worldwide attention. Owing to their nonlinear and CY-Chun Cheng and Suchiun W a g arc with &e Deparrmenl of Electrical EngPim&g. National Taiwan UniveniTy. Taipei 106, Taiwm, R.O.C.
L.-C. P u i s with me mpvnmrnt of Elrcrncal Enginerring and Depmment of Computer Science and Information Engineenne. National Taiwan Univer-
sity, Taipei 106, Taiwan, R.O.C.
unstable nature, pendulums have maintained their usefulness and been used to illustrate many of the ideas emerging in the field of nonlinear control. Astrom and FuNta [4] swang up an IP using energy-based approach with an insighIiu1 dis- cussion about swing-up behaviors. On the other hand, Spong and Praly [33] separated the problem into a swing-up control and a balance control strategy. And this method has been tested successfully on many typical underactuated mechanical systems such as Acrobot, Pendubot, three-link mechanical robot and reaction wheel pendulum [34]. Many other research have applied the neural network or fuzzy theories to control the inverted pendulum systems [21. [161, [201, [211, 1371.
On the other hand, due to the highly nonlinear dynamics, the control of induction motors has become the benchmark of nonlinear control theories and bas been extensively explored over the past decade. Recent years, their linear version- the LIMs have also been widely explored by both academics and industries in related fields. LIMs are widely used in different applications, especially in high-speed ground trans- portation [13], [24]. In this thesis, we will develop a new control system for the novel PenduLIM, which is composed of an
IP
mounted on an LIM. Undoubtedly, the overall control is an integration of the following two subsystems:In the IP control subsystem. a passivity-based swing-up control coincides with an model reference adaptive control (MRAC) stabilizing control will be integrated through a switching law. With this parameter-insensitive control, the IP can be swung up and stabilized to its upright position almost globally except for starting from the downward position. In addition, the displacement of cart will also be regulated to zero.
As for the LIM pw, a nonlinear adaptive servo’ control with unknown secondary resistance will be proposed. In p d c u l a r , this adaptive observer-based controller is capable of achieving high performance thrust as well as velocity tracking, and only the primary currents and linear speed are assumed available for the design.
By taking the advantage of this well-controlled actuator, the overall PenduLIM will work cooperatively to asymptotically erect the IP via the LIM. Most important of all, our analysis and synthesis are rigorous and systematic. The simulation as well as the experimental results will be presented to demon- strate the performance of the hereby developed integrated ‘A servo motor is a class of elemi motors used in feedback conml of B mechanical device for closed loop systems.
control system. B. Servo Control System Development
In this section, we will present a control on thrust and velocity control for a LIM. To cope with uncertain secondary resistance R,, an adaptive observer will he designed as well The inve-d pendulum control we adopt can be found Although, the following derivations is copious, but it does provide a systematical approach to solve a complex nonlinear control problem with LIM.
11. INVERTED PENDULUM CONTROL
in [ 6 ] , and the architecture are shown in Fig. 1.
Fig. 1: Architecture of MRAC for
IP
stabilization.111. LINEAR INDUCTION MOTOR CONTROL
A. Model Development
The steady-state analysis of an LIM is usually done by a classical equivalent circuit. In this thesis, we will follow this convention. Since LIMs are just cut open and rolled flat from the RIMS, to formulate the dynamic model of an LIM, we consider the following assumptions to simplify the analysis.
M1. Three phases are balanced. M2. The magnetic circuit is unsaturated. M3. End-effect is negligible.
Please note the Assumption M3 is adequate since many techniques have already been developed to eliminate such nonlinear physical phenomenon. For example, Fujii et al. proposed a simple end-effect compensator mounted on the primary p m [IO].
Then, from the model derivation of a RIM with some proven modification, we can obtain the field-oriented control (FOC) model of a LIM as follows:
intro- ducing some modification to the RIM model, we obtain the LIM model as follows:
Corollary 3.1 (Mathematical Model ofa LIM): By
1 ) Problem Formulation: Given the mathematical model of
LIM in ( I ) , the control objective is now to design a nonlinear adaptive thrust servo controller with rohusmess to variation of secondary resistance which guarantees the aymptotic stability of the closed-loop system.
In addition, the following assumptions are required to c l & y the synthesis of our control system.
M4. All the parameters of the motor except the secondary M5. The primary currents (I,,,
4 )
and velocity up are M6. The secondary resistance R, is unknown but its upperresistance R,T and fluxes ($,,. &) are known. measurable.
and lower bounds are known, i.e.,
M7. The desired force should he hounded continuously differentiable, i.e. F' E BC'.
M8. By considering Coulomb friction, viscous friction, and mechanical load effect, the load force FL can he expressed as:
FI. = PO s 5 n k (v.)
+
P I vD+
P I Cp (2)= F e - M p C p - D v , (3)
where the positive constants
IC, PO.
p l , PI, D are known and the sigmoidal function sgmk ( v p ) is defined as:M9. The secondary resistance (R,3) and the equivalent secondary self-inductance
(L,)
should satisfy 2-1>
0. The control scheme is shown in Fig. 2.Theorem 3.2 (Adaptive LIM thrust control): Consider a LIM whose dynamics are govemed by ( I ) under the Assump- tions MI-M9. Then the output electrical thrust Fe will ap- proach to the desired thrust F' asymptotically by the following ( I )
controller:
Iv.
THE PENDULIMI - -
P2
We have developed controllers for the IP as well as for its actuator subsystem, theLIM,
as proposed in Sections 11 LM-
P
and 111, respectively. In this chapter, we mount the 1P on the LIM to formulate our innovative integrated control architectureL O L O
of the PenduLIM, and the apparatus is shown in Fig. 3. On the other hand, by integrating the previously designed
U 1 =
-
(-z
R,
ljid - - upi,
+id)
= 2
(--
R,
+q+
-up& +
i,'
P3 Lo
+
-R,
12
+
' 1 2
- kl el+
w l )L 1 - - h
P3 Lo LO
for some constant
k1
>
0, where subject to the error dynamics:with
Fig. 3: The apparatus of PenduLIM (perspective view). 1
1
211 = ~ Lo L ,
Lo
L ,controls, we have the overall automatic control system for the PenduLIM, and the functional block diagram is drawn in Fig. 4. Technically, the stability and robustness will be
U2 =
-
R 8(Lo
iq
-ca)
and the auxiliary conuol inputs uti, uo,, i = 1 , 2 , 3 , 4 and
cd,
and
UCl = -Lo uc3, U C Z =
-Lo
Ue4%e3 = -91
-
Fig. 4 Integrated control architechlre of the PenduLIM
02
v,,
e2, uc4 = 91-
L , L ,
P 2
L , Lo
analyzed in Sections IV-A and
W E ,
respectively. A. Stabiliry AnalysisFirst, I have to emphasize this integration of IP and LIM is valid. Considering the block diagram shown in Fig. 4, we fed the IP conuol as thrust command of LIM thrust controller. The reason is that the desired thrust trajectory generated by IP controller satisfies the command Assumption M7 required by LIM controller which has been proven in [61. To show this
(n,
+
$ 9 2 y2 a*(&
-&))
,
ifd,
>
%
+
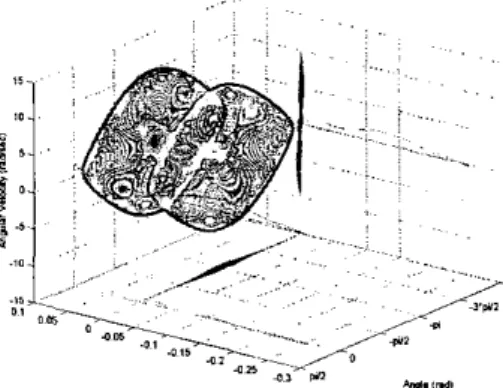
61 integration indeed achieves the desired control objectives, i.e.,regulate all the states to 0 from downward position, is shown in Fig. 5.
with the following parameter adaptation law:
A,
={
62 > if
&
= + 6,subject to
R , ( O )
>
z
+
61I
Second, one may doubt the stability of the switching rule. This unstable transition cannot happen because: ~.
.
The detailed development and proofs can be found
.
The switching only occurs once during the operation. During the stabilizing procedure. 0 will not overshoot to Ot with the adaptive control proposed in Sec. U. The
for some constants 61, 6 2 , 9 2 , y
>
0.m
q m
(b) The projection of mjcctory on 8-8 plane forma the "homoclinic orbit".
Fig. 5: System trajectory of controlled PenduLIM with its projections, and the brighter line represents the later trajectory.
major advantage of this integrated
IP
control is that no high-frequent switching between the swing-up control and stabilizing control will arise..
The switching moment is indeed Lebesgue measure' zero compared to the whole trajectory.In conclusion, this switching strategy will not cause instability of the PenduLIM.
Third, this integrated controlled system is globally asymp-
totically stable. Recall that the IP cannot he swung up if starting from downward position, i.e., xp(0)
[ r ( o )
S(O)
+(o)
d ( o ) l T
= [O mo
0 1 ~ .
as early proved in Sec. ILHowever, this plight can be overcome if takmg the the LIM subsystem into consideration. Despite the inital command generated by the IP control is zero, the transient response3 of the LIM system makes the inital states+
up#
0. As a consequence, this incident makes the IP immediately leave the forbidden equilibria, and thus the 'For more d e b l e d information about the theoly of mcilsure. please refer 'Despite the command generatul by the P control is zero, the I M cons0110 [I].
system ha5 Io adapt 10 R,. and thus ils response mu1 not be z m .
globally asymptotical stability is achieved (shown in Fig. 5).
B. Robust Analysis
To enhance the robustness of the PenduLIM against ex- ternal disturbances, it is useful to increase the control gain
g1 of LIM control system. However, this adjustment requires more power from the LIM. In c a e the PenduLIM is knocked down, the control will switch back to swing-up mode and then balance the 1P again from the the aids of switching law provided in Sec. 11.
As a consequence, we summarize the integrated control architecture for the PenduLIM in the following theorem.
Theorem 4.1 (Automatic erection of the PenduUM): Con-
sider a PenduLIM which consists of an
IP
mounted on an LIM. To automatically swing up and stabilize theIP
to its upright by exerting horizontal thrust from the LIM, we can utilize the integrated control architecture as shown in Fig. 4. Specifically, by feeding the IP control law (proposed in Sec. II) as command oto the LIM servo control system (proposed in Theorem 3.2), the overall closed-loop system is globally asymptotically stable (AS.) in the sense of arbitrary initial displacement and angle.V. SIMULATION & EXPEKIMENT RESULTS
A. Experiment Apparatus
We have built a PenduLlM equipment in the Advanced Control Laboratoty (ACL) in the Department of Electrical Engineering at the National Taiwan University. And, the sim- ulation and experiments are carried out using this PenduLlM
B. Sofmare Simulation
The software we adopt for simulation is MATLAB@ 6.1 together with SIMULINK' 4.0.4 MATLAB@ which integrates computation, visualization, and programming into an easy-to- use environment where problems and solutions are expressed in familiar mathematical notation. On the other hand, SIMU- LINK@ is a graphical package suitable for fast prototyping and for testing our controllers. The combination of these tools constructs our numerical simulation environment.
However, before performing simulations of the proposed integrated control architecture, it is important to verify the effectiveness of its subsystem-high performance LIM servo control in advance.
1 ) PenduUM Contml: Having verified the high perfor-
mance LIM servo control, it is quite straightforward to validate the PenduLIM control in this stage. Most important of
all,
we not only build the IP control system but also the LIM servo control system into our integrated controlled PenduLIM. Hence, two different initial conditions are simulated to demon- strate the effectiveness of the proposed integrated control architecture.'MATLAB' is a language of teckcul compuhg while S I M U L I N K ~ is an interactive tmI for modelling. simulating, and analyzing dynmic, multi- domain systems. Both are regirtercd sademark of the Mathworks Inc. PIC-
r
I
8I
i1
eI
olhcra0.3
I 180.0"
I
0.0I
0.01
0.0 (a) Initial values of Pendu1.M.Thrust ContmUer Gains
I
92I
7I
ki0.5
I
10.0I
1.0I
1.0 observe^ Gains(b) Designed p%hmetefs and idtial vdues of 1.M
COOUOl syatcm.
Swing-Up Controller Gains Stabilizing ContmUer Gains
0.11 3 0 2.0
(C) Designcd pamletcrs of I? CO"In>l ays1em.
Ppc 161.
wherr k' is lhc swtic fccdbackgaio computrd from
TABLE I: Various designed gains and initial values of the PenduLlM control system.
a ) (r ( 0 )
,
B (0)) = (0.3 m, 180'): Initially, the pendu- lum is rested at the downward configuration, and the primary part of the LIM is set at 0.3 m away from the middle of the track. After turning on our integrated control system, the JPtakes about 12 sec to automatically swing up to
B
= Bt =15". Soon after that time, the displacement of the primary is regulated to zero. Since the control switches to stabilize the
I
P
to the upright configuration. Therefore. the objective of automatic erection is successfully achieved.The simulation parameters of the PenduLIM control system is given in Table I. Please note that we perturb the initial guess of dynamic feedback gain
k
(0) which leads to the adaptation process ofk
as shown in Fig 6 .VI. CONCLUSIONS
We have proposed an integrated control architecture for the "PenduLIM which consists of an underactuated inverted pendulum (IP) mounted on a linear induction motor (LIM). According to this innovative architecture. the IP is swung up and stabilized to its upright unstable equilibria as well as the displacement is regulated to zero, by exerting horizontal thrust
from the LIM. In order to cope with this highly nonlinear and unstable system, the IP is controlled via a passivity-based energy controller coincides with a model-reference adaptive controller while the LIM is controlled via a thrust controller
(a) Si&$ of 1Y
Fig. 6: Simulation of controlled PenduLlM when swinging up from (7. (0) , B (0)) = (0.3 m, 180") and then stabilized to its upright.
with secondary resistance adaptation. Then, by feeding the IP control law as command of LIM servo control subsystem, the overall closed loop system is globally asymptotically stable (AS.) in the sense of arbitrary initial displacement and angle. Finally, the snccess of proposed control scheme is demon- strated by numerical simulations and a part of experiments.
REFERENCES
[ I] C. D. Aliprantis and 0. Burhshaw, Prinoiples of Real Awlysis, 3rd ed.
H m o u n I Academic Press. September 1998.
[21 C. W. Andenon, "Laming to contml an inverted pendulum using neural
netwoLks:' IEEE Control System Magomine, vol. 9, pp. 31-37. April
1989.
131 T. M. Apostol, Calculur: One-Variable Coiculus, with on Intmduction
ID Linear Algebra, 2nd ed. John Wiley & Sons. Inc.. 1967. vol. 1
141 K. J. Asv6m and K. Fwula "Swinging up a pendulum by energy
conmll:' Auiomotico. vol. 16. pp. 287-295, 2ooO.
151 M. BOdsoh J. Chiasson, and R. NovomaL. "High-performance induction
motor c o ~ v d via input-ourput linrUn~a6on:' IEEE Control Sysrem
Magazine, vol. 14, pp. 25-33, July 1994.
161 C.-C. Cheng. 'Tonml ~yslem design for lhe p d u l i m : an integrated
architecrure of inverted pndulum and Linear induction molar," m t e r lhcris. National Taiwan Ubvmiry. Deparlmrnt of ElecVical Engineer-
ing. National Taiwan Univenify. Taipei. Taiwan. R.O.C.. June 2003. 171 T.-H. Chin, I. Miy&ifa. and 1. Koga "Smsorless induction motor
drive: an innovative component for advanced motion control:' C o n w l Engineering Pmcrice, vol. 5 , no. 12, pp. 1653-1659, December 1997.
Fig. 6 : (continued).
181 J. Faiz and H. Jufari. "Accurale modeling of single~sided linear induction motor considers end eliect and equivalent lhiclmess:' IEEE Tmacrions
on Mognetics, vol. 36. no. 5 , pp. 3785-3790. September ZWO. [9] G. F, fraoklin, 1. D. Powell, and A. Emami~Naeini, Feedback Conrml
of@nnmic Syslem, 3rd cd.. ser. Addison-Wesley Series in Elrchical
and Compuutcr Engineering: Conml Engineering. Addison-Wesley Publishing Company, Inc., 1994.
[IO] N. Fujii. T. Kayasnga. and T. Horhi, "Simple cnd effect compensator for linear induction motor," IEEE Transactions on Mognetics, vol. 38. no. 5, pp. 3270-3272, September 2002.
[ I l l K. Furuta M. Yam&& and S . Kobayashi, "Swing up conml of in- velred pendulum: in iniemafional Confcrcnce on lndusrriai Ellecrmnirr,
Cootmi and Insrmmenlalinn. vol. 3, Kobe, Japan, Octokr 1991, pp.
2193-2198.
1121 -, "Swing-up conml of invened pendulum using pSeud+stalc feed- back:' Ioumol of system and Conrml Engineering, YOI. 206, pp. 263- 269, 1992.
1131 I. E Gieras, Linear lnducrion Drives. Oxford, U.K.: New ClaRndon
Press. 1994.
[ 141 1. Guckenheimer, "A m b w hybcd swhilization strategy for ylulibria," IEEE Tmnsocrions an Automatic Contmi. vol. 40, no. 2. pp. 321-126, 1995.
[I51 A. P. Iovonou and I. Sun, Robust Adaptive Coniml. New Jerrey: Rcntice HdI FTR. Prentice-Hall. Inc.. 19%.
I161 T. Ishida, N. Shiokawa. T. Nagado, and G. S., "lz-ng conml of an inverted pendulum using a neural network:' in Proceedings of IEEE Conference on Industrial Elecrmnio. Contml and insr~mentotion.
vol. 2, 1991, pp. 1401-1W.
1171 A. lsidori, Nonlinear Conlml Systems, 3rd d.. sec. Communications and Conml Engineering Series. London: Springer Verlag. 1995. [I81 H. K. Khalil, Nonlinear System. 3rd ed. New Jersey: Prentice-Hall,
Inc..
mz.
[I91 M. Kristit, 1. Kuorllakopoulos. and P. V. Kokotivif, ''Passivity and paramehic mbuswes of a new class of adaptive systems,'' Auromnrica.
""1 ?n nn 17r1-17th. 1994
pendulum around ill homucliluc orbii" Sysiem & Confml Lelierr, vol. 40, pp. 197-204, July 2000.
[23] R. Marino. S . Peresada, and P. Valigi, "Adaptivr inputoutput linearizing
conml of induction motors:' IEEE Tmnsacrions on Automatic Coniml, vol. 38. pp. 208-221, Febluary 1993.
[24] A. Nasa, Linear Elecrric Motors, T h m ~ Design and Practical Appli~ cufion. Englewmd Cliffs. NJ: Prentice-Hall, 1987.
L251 S. A. Nasar and 1. Boldea, Linear Morion Electric Machines. John Wiley 8: Sons. 1976.
[26] H. Noble and I. W. Daniel, Applied Linear Algebra. 3rd ed. New Jersey: h n t i c e Hall, 1988.
1271 R. Onega, P 1. Nicklasson, and H. Sira-Ramirez, PossivityBared
Corrfml ofEuler-lagrangs Systems: Mechanical, Electrim1 ond Ellecfm-
mgnetical Applications, set. CommuOications and Control Engineering.
Springer Vcrlag. Septemhcr 1998.
I281 W. I. Kugh, Linear System Theory, 2nd ed., ser. Prentice-Hall Infor- maion and System sciences series. New Jersey: KPntice-Hall, Inc.. 1996.
1291 S. Saw, Nonlinear Systems: malysis. stability, and conrml, ser. Inter- disciplinary Applied Mathematics. New York: Springer-Verlag N a v
York, Inc., 1999, vol. 10.
[30] T. Shinhmt, C. Grebogi, and J. Wisdom, "Chaos in a double pendulum:' American Jooumol offphysic$, vol. 60, pp. 491499, 1992.
[XI J.-J. E. Slotine and W. Li. Applied Nonlineor Conrml. Prenticc-Hall,
I"?
..
I W I.
, , . .1321 M. W. Spong, 'The swing up cmml problem for h e acmbot:' IEEE
Contml Svslem Masorim. vol. 15. no. I. OD. 49-55. 1995.
~~. . ., r _ ~ ~. ~ ~
1201 T.~H. S . U, JLH. Li, and C:C. Cheng, "&sign and implemenwtion of
huzy stiding~mode conmUea for spring-linkcd two cvhpole systems:' in iEEE Inremational Confcnnce on Systems, Mon. ond Cybemrrics,
vol. I. October 1999, pp. ~M3-348.
[Zl] C. E. Lin and Y:R. Shew "A hybrid-contml approach for penddum-car
conml:' lEEE Tranroctiuns on Idustrio1 Electmnics. vol. 39. no. 3.
pp. 208-214. June 1992.
1221 K. lawno. I. Fantool, and D. I. Block, "Stahiliratioo of the inverted
1331 M. W. S k n g and
i.
M y , "Enc& bas;; conml of underactuatedmechaolcal systems using switching and saturationi," in Reptinis ofihe
Block island workshop on confml using logic~bared switching, 1995, [341 M. W. Spong, P. Corke, and R. Iarauo, "Nodinear conml of the reac- lion whecl pndulum," Auromarica, vol. 37. pp. lW5-1851, November
2001.
1351 J. M. T. Thompson and S. R. Bishop, Us.. Nonlineotity and Choos in Engineering Dynomicr. Inlemationul Uluon of Theontical and Applied Mechanics Symposium. Uluvenitv College London: John Wtiey & Sons. July 1993.
1361 M. mdyaagar, Nonlinear System AndysiS. 2nd ed. New Jeney: Prentice-Hall, Inc.. 1993.
1371 G. J. Wang and D. K. Miu, "Unsupenising adaptive neurd-network conuol:' in Pmc. IEEE h r . Conf Neural Nenvorkr, vol. 3 . 1990, pp. 421428.
[381 M. Wiklund, A. Kristenson, and K. J. AsUGm, "A new smtegy for Swinging up an inucrtcd pendulum," in Pmprints IFAC 121h world congress, Sydney, Ausualia 1993.
[39] M. Yamakio. M. Iwashim, Y. Sugahara. and K. Furuta, "Robost swing up conml of double pendulum:' in Pmceedings ofrhe American Confml Conference, ser 21-23, vol. I. Seattle, Washington USA. June 1995. pp 29W295.
[401 M. Yam&% K. Nonaka and K. F u l a , "Swing up c ~ lof doublc d pendulum," in Pmceedings of the Ametican Conrrol Conference, San Francisco, Califomia USA, June 1993. pp. 2229-2233.