國立臺中教育大學資訊科學學系碩士論文
指導教授:林嬿雯 教授
都會車載網路中協助雲端服務遞送之行
動預測機制
An Efficient Mobility Prediction Scheme for Cloud
Services Delivery in Urban VANET
研究生:許芳瑜 撰
中華民國一百年七月
致謝
時光荏苒,大四下學期剛開學不久,推甄研究所放榜的榜單還歷歷在目,轉眼已經 到了碩士論文付梓的時刻,回想起這段與大學生活截然不同的研究所生涯,心中便有諸 多感激不斷浮現。首先要感謝我的指導教授林嬿雯老師,第一次走進您充滿書本、動物 玩偶、綠意、流水聲與咖啡香的研究室,就令人印象深刻且驚喜,謝謝您這些日子以來 不管在課業、研究或生活上的鼓勵與殷切叮嚀,伴隨著嘻嘻笑的家教式指導方式,令我 了解到何謂快樂的學習,Meeting 時可以從天南聊到地北,其間的嚴肅討論或歡笑閒磕 牙,都是令人想要悉心收藏的回憶。 接著,感謝我的口詴委員陳澤雄老師與顧維祺老師,於百忙之中抽空翻閱論文,對 於不足之處給予寶貴建議使其更臻完善,尤其是顧維祺老師,從您的課堂上使我學習到 對研究嚴謹的態度,您的翩翩風采更使我們如沐春風。此外,感謝張林煌老師對於我們 未來生涯規劃上的諄諄教誨,您的用心良苦我們銘記在心;感謝王讚彬老師對於研究所 課程的細心指導,王老師名言:「魔鬼出現在細節裡」及「黎明前總是最黑暗」伴隨著 我度過撰寫論文的無數個晝夜;感謝賴冠州老師與黃國展老師於教學時不厭其煩的反覆 解說,令我充分感受您們的耐心;感謝李宜軒老師在書報討論課仔細的教導我們報告的 技巧與科技論文參考文獻的格式,使我在研討會報告、計劃編撰及論文寫作等方面都獲 益良多;感謝總是散播歡樂散播愛的徐國勛老師,使我們於研究之餘得以放鬆;感謝系 辦最妖嬌的小百合不論離職前後不變的關懷與打氣,也感謝鄭姐對於口詴及學生事務的 支持與協助。 感謝實驗室林家大院的夥伴,治翔學長、惟婷學姊(香菇)、政棋、阿民、唐哥、 浩鈞、家浚,有你們的幫忙與教學相長,使我論文的產出更加順利,尤其是治翔學長, 非常謝謝你不斷給予我研究上的分析建議,及大方的分享工作心得與經驗;感謝朝棨學 長、本和學長及思堯學長,有你們在的實驗室更像個大家庭;感謝八隻眼集團鈺軒(阿 包)、民德、豐旭(風扣),我們共度的時光,是研究生活中最燦爛的一筆;感謝東穎、瑋辰(小乖)、冠霖,與你們鬥嘴得以活絡僵化的腦袋;感謝其他實驗室的學弟妹們, 昱群、怡涵(小孙智波班)、博仁(栗子哥)、天亮、舜斌(小麥)、裕其(米奇)、碩瑤 (米妮)、朝傑、還有朝陽雙 K,智鈞(K 妮)與丞均(Oliver),你們每天爆笑的發言 總令人捧腹。 另外,很幸運的我擁有一群很棒的菸酒生室友,莊敬肖肖團的滿分冷面笑匠欣儒、 神經接錯線的功夫少女兼兼、常有驚人之語的阿秓(啾啾)與阿璇;小詠新生活啟動後 相遇的憨憨小瘋子阿琪、聰明可靠的領主佳誼、幽默搞笑的 NO 哥,謝謝你們與我分享 不同系所的生態,我會記住你們帶來的每一次驚奇,以及你們與我實驗室學弟妹一起胡 鬧的日子。 接下來,我要感謝無論再忙也不忘持續鼓勵關心我的阿燕與章魚米,還有前來台中 探望我的懇親團:巧克力、雪衣、小藤、小暉、小步、小荻、阿輔與胖胖,以及焦頭爛 額之際仍空投打氣筒至此的阿裨、頊頊與嘉淋。我明白世上沒有這樣的筆,能留住一縱 即逝的光陰,此時恣意揮灑的青春,有你們這些多年好友一路相伴的軌跡,我由衷的深 深感激。 最後,要感謝我最摯愛的雙親,因為有你們,我才能無後顧之憂的完成研究所的學 業,這四個字背後要付出的辛苦代價我從未小看,並期待往後能由我來成為你們的支柱。 謹以此文獻給我最重要的家人:愛說反話的聖人老爹、理性感性兼具的天才老娘、該加 油的老弟、最疼我的偉大爺爺、傲嬌的活力阿嬤、慈祥和氣的外婆、與在天上當神以四 處遊歷的外公,所有的成就與喜悅,若無法與你們分享,一切都沒有意義。 許芳瑜 謹誌於 民國 100 年 7 月
I
摘要
隨著無線網路技術的快速發展,車載隨意網路(Vehicular Ad Hoc Network, VANET)的 技術漸趨成熟,同時雲端運算技術(Cloud Computing)亦成為近來熱門趨勢,透過車載 網路技術與雲端運算的結合,可增進各類車輛應用的效能及可用性。然而,在車載隨意 網路中,由於車輛的高移動性,將產生如拓樸頻繁改變、IP 位址重新配置、連線頻繁中 斷等諸多挑戰,使得整體服務效能下降。本文透過隱藏式馬可夫模型(Hidden Markov Model, HMM)分析行動用戶的移動軌跡,並考量車輛的高移動性,提出一適用於都會 環境中的行動預測機制,利用雲端進行預測程序並進行連線資源預先配置,藉此降低行 車之間連線頻繁中斷所造成的影響,並改善行動用戶透過基礎建設取得雲端服務時的處 理效率與服務品質,同時減少不必要的連線重設。透過模擬驗證本文所提出之行動預測 機制對於減少連線重設次數、換手次數、換手乒乓效應、帄均封包傳輸延遲時間、封包 抵達率以及控制成本消耗上確實有良好的表現。 關鍵詞:車載隨意網路、雲端運算、行動預測、隱藏式馬可夫模型
II
Abstract
With the rapid development of Vehicular Ad Hoc Network (VANET) technologies, variety of applications and services become available. To enhance the availability, include data processing, storage, and computing capabilities can be improved by next generation networking technologies which cloud computing. However, due to the high mobility of vehicles, changing network topology, address migration, and frequent connection interruption, the overall service performance degradation. Therefore, knowing the future location of VANET users is helpful to reduce the impact of frequent connection interruption. The proposed mobility prediction scheme uses Hidden Markov Model (HMM) to analyze the movement trajectory of mobile users, and predict future location of VANET users in urban environment. Through the mobility prediction, the cloud assists connection pre-configuration and resources reservation. As shown in simulation results, the proposed mobility prediction scheme can decrease the number of reconnection and handover, shorten the average end-to-end delay time, increase packet delivery rate, reduce signaling overhead, and reduce the impact of Ping-Pong effect. Consequently, by reducing the number of unnecessary reconnection, the performance of cloud services delivery is apparently improved.
III
目錄
第 1 章 緒論 ... 1 1.1 研究動機 ... 2 1.2 問題描述 ... 2 1.3 研究目標 ... 2 1.4 論文架構 ... 3 第 2 章 相關研究 ... 4 2.1 VANET ... 4 2.2 雲端運算 ... 4 2.3 行動預測技術 ... 5 2.3.1 行動預測背景 ... 5 2.3.2 行動預測技術分類 ... 6 2.3.3 行動預測機制 ... 7 2.4 適用於資料遞送之路由協定 ... 17 2.4.1 AOMDV ... 17 2.4.2 AODV+ ... 18 2.5 隱藏式馬可夫模型(HMM) ... 19 2.5.1 HMM 模型概述 ... 19 2.5.2 HMM 模型元素定義 ... 20 第 3 章 研究方法 ... 22 3.1 系統架構 ... 22 3.2 方法流程 ... 25 3.2.1 訊息交遞流程 ... 253.3 The Proposed Mobility Prediction Scheme ... 31
3.3.1 Mobility Model 與 Mobile Trace ... 31
3.3.2 預測模型元素定義 ... 33
IV 3.3.4 Mobility Prediction in HMM ... 36 第 4 章 效能分析 ... 41 4.1 模擬環境與參數設定 ... 41 4.1.1 行動預測程序模擬 ... 41 4.1.2 網路效能模擬 ... 43 4.2 效能測量項目定義 ... 45 4.3 行動預測準確率實驗 ... 46 4.3.1 不同車速下的預測準確率 ... 46 4.3.2 不同模擬時間下的預測準確率 ... 47 4.3.3 轉彎次數對預測準確率的影響 ... 47 4.3.4 轉彎方向與未來 AP 的預測準確率 ... 48 4.4 連線重設與換手次數實驗 ... 50 4.4.1 不同車速下的連線重設次數 ... 50 4.4.2 不同模擬時間下的連線重設次數 ... 51 4.4.3 不同車速下的換手次數 ... 52 4.5 資料傳遞帄均延遲時間實驗 ... 53 4.5.1 不同車速下的帄均延遲時間 ... 53 4.5.2 不同 Traffic Load 下的帄均延遲時間 ... 54 4.5.3 預測方法與真實表現之帄均延遲時間比較 ... 58 4.6 封包抵達率實驗 ... 59 4.6.1 不同車速下的封包抵達率表現 ... 59 4.6.2 不同 Traffic Load 下的封包抵達率 ... 60 4.7 控制訊息成本實驗 ... 62 第 5 章 結論 ... 64 5.1 論文貢獻 ... 64 5.2 未來工作 ... 64 參考文獻 ... 66
V
表目錄
Table 2.1:Comparisons of Mobility Prediction Techniques [14] ... 7
Table 2.2:Comparisons of Mobility Prediction Scheme……….16
Table 3.1:Detailed Description of the Mobile Trace Content... 32
Table 3.2:Elements of HMM Model [42] ... 34
Table 3.3:Parameters Setting ... 37
Table 4.1:Emission Probabilities Matrix Setup ... 42
Table 4.2:Example of Observed Sequences ... 42
VI
圖目錄
Figure 2.1:User from APA to another [13]... 8
Figure 2.2:Flowchart for Prediction [13] ... 8
Figure 2.3:System Scenarios of VADD [23] ... 9
Figure 2.4:Delay Model of VADD [23] ... 9
Figure 2.5:The terminal's mobility path in Cell Network [24] ... 10
Figure 2.6:Average Distance Prediction Error in Mobility Model ... 12
Figure 2.7:Sensitive divisions in a regular hexagonal cell ... 13
Figure 2.8:All possible links after one movement [34] ... 13
Figure 2.9:System Scenario of Bo's Scheme [37] ... 14
Figure 2.10:System Scenario of Hsu's Scheme [38] ... 15
Figure 2.11:Routing table entry structure in (a) AODV and (b) AOMDV [39] ... 17
Figure 2.12:Screenshot of the system scenario [45] ... 19
Figure 2.13:A HMM Model [13] ... 20
Figure 3.1:System Model ... 24
Figure 3.2:Network Architecture ... 24
Figure 3.3:The Message Flow of Phase 1.1 (Reactive) ... 26
Figure 3.4:The Message Flow of Phase 1.2 (Proactive) ... 28
Figure 3.5:The Message Flow of Phase 2.1 (Stay) ... 29
Figure 3.6:The Message Flow of Phase 2.2 (Handover) ... 30
Figure 3.7:Example of Manhattan Mobility Model ... 30
Figure 3.8:USC Wireless Coverage [46] ... 33
Figure 3.9:States Transition of Mobility Prediction Scheme ... 36
Figure 3.10:HMM Mobility Prediction Model ... 37
Figure 3.11:Example of Mobility Prediction Scheme ... 38
Figure 4.1:Simulation Model ... 43
Figure 4.2:Accuracy of Mobility Prediction for Different Vehicle Speed ... 46
Figure 4.3:Accuracy for Different Simulation Time ... 47
Figure 4.4:Effect of Sequence Length on Prediction Accuracy ... 48
Figure 4.5:Accuracy of Prediction Hit Rate ... 49
Figure 4.6:The Number of Re-Connection for Different Vehicle Speed ... 50
Figure 4.7:The Number of Re-Connection for Different Simulation Time... 51
Figure 4.8:The Number of Handover for Different Vehicle Speed ... 52
Figure 4.9:Average End-to-End Delay Time for Different Vehicle Speed ... 54
VII
Figure 4.11:Average End-to-End Delay Time for Different Traffic Flow (MPV2R) ... 55
Figure 4.12:Average End-to-End Delay Time in FTP ... 56
Figure 4.13(1a):Average End-to-End Delay Time in CBR (High Load) ... 56
Figure 4.13(2a):Average End-to-End Delay Time in CBR (High Load) ... 56
Figure 4.13(1b):Average End-to-End Delay Time in CBR (Low Load) ... 57
Figure 4.13(2b):Average End-to-End Delay Time in CBR (Low Load) ... 57
Figure 4.14:Average End-to-End Delay Time in MPV2R and Real Trace ... 58
Figure 4.15:Packet Deliver Rate for Different Vehicle Speed ... 59
Figure 4.16:Packet Deliver Rate for Different Traffic Flow (AODV) ... 61
Figure 4.17:Packet Deliver Rate for Different Traffic Flow (MPV2R) ... 61
Figure 4.18:Packet Deliver Rate in FTP ... 61
Figure 4.19(a):Packet Deliver Rate in CBR (High Load) ... 62
Figure 4.19(b):Packet Deliver Rate in CBR (Low Load) ... 62
1
第 1 章、緒論
1.1 研究動機
隨著無線網路技術的蓬勃發展,人們得以隨時隨地透過可攜式裝置與網際網路存取 點的連接,跨越不同的設備與帄台,使用各式各樣的行動應用(Mobile Application), 分享於居家或是行車之間。此外,由於可攜式裝置本身受限的儲存與計算能力,雲端運 算技術(Cloud Computing)的支持促進了更多行動應用的可能性,行動用戶可訂閱各式 雲端服務如整體交通路況、各式數位娛樂應用或民生資訊等。然而在車載隨意網路(Vehicular Ad Hoc Network, VANET)中,由於車輛在不同的 道路環境如高速公路、都市街道及鄉間道路上,皆具有不同的移動速度與運動模式,行 動用戶連線過程中的網路拓樸非常容易變動,位址也需時常更換,加上車輛的移動範圍 可能涵蓋了許多不同的網路存取技術,不同的基地台可提供的服務能力與訊號覆蓋範圍 亦不盡相同,使得車載網路環境常具有變動的資料傳輸率;因此增加資訊封包傳遞的困 難度,行車之間的通訊連線亦會頻繁地中斷或重新連接,將使得整體傳輸效能下降,造 成服務品質低落。 若能預測行動用戶未來的位置,便可進行預先服務配置(Service Pre-configuration)、 換手管理(Handoff Management)、預約可用資源(Resource Reservation)等,增加資 訊傳遞的可靠度、減少封包延遲時間及提升整體效能。而無論可攜式裝置或車用系統 (On-Board Unit, OBU)所能提供的資源與計算能力與提供雲端服務的基礎建設 (Infrastructure)相較之下皆十分有限,若能將大量且複雜的預測程序移至雲端進行, 利用雲端強大的計算及儲存能力來協助預測運算,將減低車用系統之負載與成本,如此 一來,即使面對頻繁中斷的通訊連線及易變動的網路拓樸,仍然可維持行動用戶在行車 之間取得雲端服務時,整體應用的可靠性與傳輸效能,進而提升整體服務品質與使用者 的良好感受。因此,如何在連線頻繁中斷的通訊過程中,透過雲端預測行動用戶未來的
2 位置,藉此預先配置連線及預留資源,降低因車輛高移動性所帶來的影響,是本文主要 的研究議題。
1.2 問題描述
在車載隨意網路中的行動用戶,欲透過道路上的網路存取點(如基地台等),取得 其訂閱的雲端服務時,連線過程中可能因車輛的高移動性(High Mobility)、無線環境 中變動的資料傳輸率及網路拓樸的急遽改變等,造成資訊傳遞的延遲與掉包,使得通訊 連線容易不穩或中斷;而連線的頻繁中斷帶來的影響如資料傳遞的延遲時間增加、封包 抵達率與傳輸效能下降等,將會使行動用戶取得服務應用的連線可靠度降低及整體服務 品質低落。 此外,車輛上的行動用戶欲連接基礎建設取得雲端服務時,行動裝置必頇先向通訊 範圍內的網路存取點註冊並建立連線,再開始接收雲端服務資訊,在此連線過程中,由 於車輛移動的範圍與距離較廣,時常會橫跨不同的區域與基地台,甚至註冊程序尚未完 成,車輛可能就已離開該基地台的訊號覆蓋範圍;為了確實達到資訊的交換與傳遞,可 能造成網路負載、資料延遲時間的增加與不必要的頻寬浪費。目前現有的行動預測機制 大多未考量車輛的移動模式與突然的移動變化,若直接用於 VANET 中,預測準確率將 大幅下降,因此,如何有效的在 VANET 中執行行動預測並協助資料的遞送,進而提升 連線服務品質,尚有許多改進的空間。1.3 研究目標
本論文探討都市(Urban)中的車載網路環境中,當訂閱雲端服務的行動用戶在街 道上移動,欲連接基礎建設以取得雲端服務時,透過觀察行動用戶過去的歷史移動記錄 (包括連線時間點、Session 存活時間、所連接存取點位置等),與其在系統中運動模 式的規律,利用二階馬可夫模型(Order-2 Markov Model),或稱隱藏式馬可夫模型 (Hidden Markov Model, HMM)加以分析評估,估測行動用戶未來可能的連線存取點,3
事先進行連線配置與資料傳遞,藉此改善在都市環境中,行動用戶透過基礎建設連接雲 端服務時的處理效率與服務品質,改善行車過程中連線頻繁中斷所造成的資料帄均延遲 時間(End-to-End Delay Time)、封包抵達率(Packet Deliver Rate),同時減少不必要 的連線重設(Re-Connection)與換手(Handover)次數。
1.4 論文架構
本論文的架構如下:第一章緒論描述了研究的動機、問題描述與研究目標;第二章 相關研究分別概述車載隨意網路、雲端運算技術、行動預測機制、適用於資料遞送之路 由協定與隱藏式馬可夫模型的介紹與定義;第三章研究方法的部分則說明了系統架構、 方法流程及本文所提出的預測機制介紹;第四章效能分析則展示了本論文提出的機制模 擬分析的結果與說明;第五章結論的部分說明了論文貢獻與未來工作。4
第 2 章、相關研究
2.1 VANET
車載隨意網路(Vehicular Ad Hoc Network, VANET)為無線隨意網路(Mobile Ad Hoc Network, MANET)的變化應用,主要描述具備通訊能力的車輛行駛於道路 時,得以與其他車輛進行資訊交換,或透過路邊裝置的基礎建設(Infrastructure) 連接上網際網路,使用各式各樣的應用與服務。藉由結合其他交通運輸工具與感測 技術,更可協助智慧型運輸系統(Intelligent Transportation System, ITS),改善行 車安全、運輸效率與交通壅圔等問題 [1]。VANET 的形成環境可能在高速公路、 鄉村小徑或都市的道路之間,因其具有較為特殊的形成條件及行為,在通訊上的特 性與 MANET 相較之下,具有較無限制的網路規模(Network Scale)、可能不斷分 割或重組的網路結構、快速動態改變的網路拓樸、間歇性的通訊連線與較高的移動 性(High Mobility)等 [2, 3]。依據車輛進行通訊時所連接的對象,可分為以下三 種通訊模式 [4, 5]:
Roadside-Vehicle Communications(RVC):又稱 Vehicle-to-Roadside(V2R),
車輛可以透過路旁的 AP 或是基地台連線到網際網路索取所需的資訊。
Inter-Vehicle Communications(IVC):又稱 Vehicle-to-Vehicle(V2V),周
遭無基礎建設的情況下,車輛得以與鄰近車輛獨立通訊。
Hybrid-Vehicle Communications(HVC):結合 RVC 以及 IVC 之網路架構,
使用此通訊方式能夠增加網路傳輸的可靠性、效能與服務性。
2.2 雲端運算
在後端的骨幹網路中,建構多台電腦伺服器與資料庫,藉以提供網路使用者的運算 服務,便稱之為雲端運算(Cloud Computing)[6]。若將在用戶端上執行的應用軟體轉 移至雲端運算上,不傴可減低用戶端資訊設備維護的費用,更能有效利用資源。雲端運
5 算技術除了可降低使用者於軟硬體各方面的成本(Cost),置於雲端上的資源便於提供 多使用者共享,且較易於維護,並具有可持續發展性(Sustainability),然而資料與個 人隱私安全性(Security)等問題亦成為一大挑戰 [7, 8]。
2.3 行動預測技術簡介
2.3.1 行動預測背景
行動預測技術的重要性一開始來自 Mobile Location Services(MLS)[9-11],根據使 用者當前或未來的所在位置(Current or Predicted Location)、結合使用者的個人資訊 (Profiles),藉此提供增強性的無線服務,諸如服務供應商發送鄰近地區的線上廣告 (Pushed Online Advertising)、依據位置動態調整的地圖(Map Adaptation)、使用者 收集到的資料(User-Solicited Information)如交通訊息、天氣預報等等,亦可使相鄰地 區的使用者進行即時訊息溝通,或是藉此提供路線指引,引領人們到達目的地 [12]。 使 用 者 的 行 動 預 測 ( User Mobility prediction ) 對 於 協 助 換 手 管 理 ( Handoff Management)、資源預留(Resource Reservation)、預先配置服務(Service Preconfiguration) 等扮演著關鍵的角色 [12];資料傳遞時,透過用戶行動預測可協助行動用戶在行進間的 換手管理、資源預留和服務預先配置等,增進資料傳輸時的效率與可靠度 [13];而[14] 中也提到倘若行動終端的位置能預先知悉,位置更新(Location Update)的頻率便能夠 大幅降低。此外,行動用戶的移動,將導致網路拓樸的頻繁變化,透過行動預測可減輕 此情況所帶來的影響 [15],如導致連線頻繁中斷、封包延遲時間及遺失率提高、資料傳 輸效能與服務品質低落等。在[16]中也提到,不論是同質網路(Homogeneous Networks) 或異質網路(Heterogeneous Networks),行動預測都是非常重要的議題,除了可應用在 行動管理機制上,也與允入控制(Call Admission Control, CAC)、促進更帄滑的換手 (Smooth Handover)、資源預留及提升服務品質密切相關。
6
廣義而言,行動預測涵蓋了位置預測(Location Prediction)、距離預測(Distance Prediction)、鏈結持續時間預測(Link Duration Prediction)、鏈結可用性預測(Link Availability Prediction)等,也可應用於路由協定(Routing Protocols)中 [15];狹義來 說,行動預測的方法大多與行動用戶的位置資訊相關 [13, 17],預測的方式可被定義為 行動用戶在網路中移動時,下一個連接網路的存取位置,例如基地台 [13, 17]。
2.3.2 行動預測技術分類
有關行動預測的技術,[14]中依據進行預測的考量方式概分為三種策略:個人資訊 基礎策略(Profile-Based Strategy, PBS)、行為基礎策略(Behavior-Based Strategy, BBS) 及道路拓樸基礎策略(Road-Topology-Based Strategy, RTB) [14]。
個人資訊基礎策略(Profile-Based Strategy,PBS):考慮行動用戶的長期移動歷 史資訊,包含移動路徑(Moving Paths)、移動的特性(Moving Characteristics)等, 列出用戶最有可能的未來位置;此方法可有效減少位置更新(Location Update), 然而一旦行動用戶的數量增加,整體控制訊息成本(Signaling Costs)隨之提高, 呼叫(Paging)及分頁延遲(Page Delay)的成本亦會增加 [18] 。 行為基礎策略(Behavior-Based Strategy,BBS):此方法透過觀察儲存在資料庫 中的大量用戶移動記錄,如連線時間、使用 IP、識別資訊等,觀察其規律行為來對 行動用戶做預測;優點是預測準確度較高,但也因每個行動用戶通常都具有一個以 上的移動行為,並會不時地改變路徑,使得負責記錄行動用戶移動行為的資料庫維 護成本提升,系統較缺乏彈性及擴充性 [19, 20]。 道路拓樸基礎策略(Road-Topology-Based Strategy,RTB):藉由數位地圖與 GPS 定位裝置,配合來自行動用戶的即時訊息,在特定的時間間隔或距離內,可提供準 確性較高的行動預測;且由於系統中具備了地圖及道路資訊,較能掌握行動用戶與
7
連線對象(如基地台)換手的時刻,藉此可較有效率的進行連線資源的預約保留。 然而在行動用戶快速移動的情況下,位置更新的成本將大幅提升 [21, 22]。
以上三種行動預測策略的比較如 Table 2.1 [14]。
Table 2.1:Comparisons of Mobility Prediction Techniques [14]
Database Data Mining MAP GPS Flexibility Accuracy Profile-based Normal No No No Poor Normal Behavior-based High Required No No Poor Best Road-topology-based Low No Yes Yes Normal Normal
2.3.3 行動預測機制
Prasad's Scheme [13]:
Prasad's Scheme [13]提出一個在校園網路環境下的簡單架構,主要利用二階馬可夫 鏈(Order-2 Markov chain),即隱藏式馬可夫模型(Hidden Markov Model)來獲取使用 者的移動歷史資訊,並進行預測。此研究另以預測結果,透過數學分析提出相對應的資 源管理方案,其模擬結果,利用實際測量記錄的 Mobile Trace,來驗證預測模型的準確 度,以及在不同的 AP 位置、行動用戶、迭代次數下的預測表現。 其預測方法的示意圖及預測流程如 Figure 2.1 及 Figure 2.2,意即以行動用戶的當前 連線的 AP 與前一個連線的 AP,來預測下一個目標 AP,此預測模型的轉換機率如公式 (2.1) [13]所示。 (2.1)
8
Figure 2.1:User from APA to another [13] Figure 2.2:Flowchart for Prediction [13] MPB [14]:
MPB [14]提出一個在行動用戶高移動性情況下的行動位置管理機制,透過地圖資訊、 GPS 定位裝置以及用戶長期的移動記錄進行用戶行動預測,藉此尋找位置更新的最佳門 檻。其預測機制主要關注行動用戶之目的地,觀察其移動偏好(Moving Preferences), 而非行動用戶在 Cell 或路段中的轉換,這些行動用戶的長期移動歷史資訊,包含了行動 用戶的目的地(Destination)及時間索引(Time Index),儲存於基地台(Base Station, BS) 的資料庫中,用來作為行動預測的依據;此研究並假設每個行動用戶皆具備 GPS 功能, 而基地台具備電子地圖及資料庫,最後透過實測來驗證所提出的方案確實可降低位置更 新所造成的系統資源消耗。
MPMboLC [16]:
[16]提出適用於異質網路的行動預測機制(Mobility Prediction Mechanism based on Logistic Cells, MPMboLC),由於不同網路技術的標準與協定需求皆有所差異,大多數 行動預測的機制都建構於同質網路,要在多種網路技術混合的異質網路中實現,可說是 相當困難,因此利用 IEEE 802.21 [35]的異質整合方案,針對各種不同的網路技術提供 一個行動預測的帄台。
9
此研究著重關注預測行動用戶即將進入的 Cell,欲達此目的,需獲得異質網路中的 拓樸結構,可透過兩種方式:一是設計專門的控制訊息(Signaling)來獲取不同網路中 其他鄰居節點的訊息,增加通訊的機會,但此方法實行上十分艱難;二是透過第三方(可 能是專門的伺服器),來收集不同網路中的資訊,並提供給行動用戶,此方式可由 IEEE 802.21 的媒體獨立換手協議(Media Independent Handover, MIH)來完成。
VADD [23]:
VADD [23]為 J. Zhao 與 G. Cao 等人所提出,在都市環境(Urban)下,透過車輛來 協助資料傳遞,假定每台車輛皆清楚自身位置,且具備街道靜態地圖資訊及交通流量統 計(Traffic Statistics),藉由地圖及流量統計所得出的街道權重(Street Graph Weighted), 來估測兩相鄰路口間的路段資料抵達延遲時間(Packet-Delivery Delay),將資料封包傳 遞至預測車流量較密集的路段,如 Figure 2.3 所示,雖然路段 Ia至 Ib具有較短的地理距 離,但車輛會經由 Ia、Ic、Id至 Ib的路段傳送。
而其資料延遲計算模型(Data Delivery Delay Model)如 Figure 2.4 所示,若車輛週 遭無合適的對象可協助傳輸,該車輛會先將資料封包暫存在自身的 Buffer 中,留待連接 上合適的中繼車輛再進行傳遞(即 Carry and Forward)。由於車輛行進間可能會偏離預 測路徑,因此若處於 Forwarding Process 的階段時,車輛會不斷地重新估測延遲時間最 低的路徑,作為下一個遞送的目標。VADD 同時為適用 VANET 中都市街道環境之資料 遞送路由協定,因此本文中將其列為比較對象之一。
10
MRP [24]:
MRP [24]考慮在蜂巢式網路(Cell-Network)中的網路流量行為(Network Traffic Behavior),包含用戶在 Cell 中處於活躍狀態(Active)時的逗留時間(Sojourn Times)、 移動模式(Movement Patterns)及位置,透過馬可夫鍊的更新過程(Markov Renewal Process)、又稱半馬可夫過程(Semi-Markov Process),來預測在特定時間 t,任意行 動用戶從當前位置移動到下一個 Cell 的轉換機率,藉此可進行網路資源管理(如頻寬的 配置),使行動用戶的感受能維持良好的服務品質(Quality of Service, QoS)。
此研究並利用真實的蜂巢式網路中,自各個 Cell 收集來的用戶流量記錄(Real Traffic Data)來做數學分析:以行動用戶在特定兩個基地台到其鄰近位置的轉換為例,驗證其 預測系統在 200 筆真實記錄中,能達約 46.4%的準確度;此研究中行動用戶移動路徑的 示意圖如 Figure 2.5 [24]。
Figure 2.5:The terminal's mobility path in Cell Network [24] Pattern matching [25]:
Pattern matching [25] 認為過去在 MANET 中的行動預測機制如[26-29]等研究,其預 測系統中的行動節點移動性是非隨機(Nonrandom),意即網路拓樸實際上是靜態的, 傴假設各個行動節點知悉自己的當前位置、移動速度與運動方向夾角(Motion Direction Angle),並以此來預測各行動節點的未來位置或鄰居節點;對於行動用戶的移動性, 需考量其突然的移動變化[28, 29],若傴假設行動節點是線性移動,並不符合真實世界的
11 情境。對於現實中的行動節點移動性,應參考如[30]的文獻中所提出,在不同的環境中, 模擬真實世界行動節點之運動規律的移動模型(Mobility Models)。 由於不同的移動模型具有不同的運動模式(Mobility Pattern)、採樣率(Sampling Rate)及不同的速度區間,將會大幅影響行動預測的準確度[25];因此[25]提出一個評估 機制,在特定時間內,每個節點會維護自身的移動歷史記錄,包含其先前的位置,進行 每一次的預測時,節點會查詢(Query)自己過去的移動記錄,尋找相似的運動模式, 根據一個匹配門檻值(Match Threshold),依不同的移動模型動態改變其評估係數(即 Mobility Pattern Matching),藉此更準確的預測兩個相鄰節點間的未來距離,進而減少 網路拓樸的負載(Overhead)及行動節點的電量消耗。
此研究並透過 Mobisim [31]產生 20 組行動節點的移動記錄(Mobile Trace),包括 每個節點的位置、移動速度及運動方向夾角,代表真實的節點移動對照組;再利用 Matlab [32]實作其提出的機制在不同移動模型下的表現情形。
其驗證結果顯示,在對行動節點進行未來位置預測時,不論考慮何種移動模型,其 預測之錯誤率皆減少許多,且大幅貼近節點實際上的未來距離。Figure 2.6 [25]表示了在 高速公路移動模型(Freeway Mobility Model)與曼哈頓移動模型(Manhattan Mobility Model)下,兩行動節點間實際的未來距離、未參考移動模型的預測機制(圖中以 Simple Prediction 代表)與此研究提出的評估機制(圖中以 Enhanced Estimators 代表),三者 預測錯誤率的表現情形。因此在本論文中,對於校園及城市環境中行動用戶的移動模式, 亦納入了曼哈頓移動模型作為參考。
12
Figure 2.6:Average Distance Prediction Error in Mobility Model [25] YL Tang’s Scheme [33]:
YL Tang’s Scheme [33] 提出一個在缺乏行動用戶歷史位置資訊的情況下,依據 Cell 的敏感範圍(Sensitive Ranges)進行行動預測的機制;此方法按照行動用戶在 Cell 之間 的轉換機率來分割 Cell 的敏感範圍,再以分割後的敏感範圍為基礎進行預測:在 Cell 之間的轉換機率(Probability of Cell Transformation)定義為敏感度(Sensitivity),轉換 機率越大,表示敏感度越高,反之亦然。 以一個六角型的 Cell 為例,將其敏感度分為三個範圍,依敏感度低到高依序編號, 如 Figure 2.7 [33]所示,最內黑色部分為敏感度最低的 1 號範圍、中間陰影部分為敏感度 中等的 2 號範圍,以及最外側白色部分敏感度最高的 3 號範圍;計算行動用戶當前位置 與 Cell 間的最短距離,若是落在 1 號範圍,則預測行動用戶的未來位置會停留在當前的 Cell 中,若落在其他範圍,則依相對應的演算法計算行動用戶的下一個 Cell 位置。此機 制與利用一階馬可夫模型(Order-1 Markov)做行動預測的方法進行比較,可驗證其預 測精準度有較佳表現,然而此機制以用戶步行速度進行模擬,接近靜態拓樸,也無用戶 移動性考量,較不符合真實世界之情境。
13
Figure 2.7:Sensitive divisions in a regular hexagonal cell [33] M Chegin’s Scheme [34]:
M Chegin’s Scheme [34]在都市(Urban)環境,提出鏈結存活時間(Link Expiration Time)的預測機制,使網路中的行動節點能依此選擇較可靠與持久的路徑,避免自行尋 找路徑(Discover Path)的程序,藉此最佳化路由及提高系統整體效能。此研究以曼哈 頓移動模型來模擬都市的街道地圖,並依據行動用戶(如車輛或行人)在地圖上一個時 間單位裡所移動的距離(即 Hop Movement)進行預測,所有預測出的鏈結存活時間會 儲存在預測表(Prediction Table)中;並假設所有的行動用戶皆具備都市地圖,預測表 會儲存於每個行動用戶中且能夠重複使用。此研究的廠井範例如 Figure2.8 [34]所示,圓 圈代表十字路口,雙向直線代表雙向街道,方塊及人形分別代表車輛與行人,虛線則表 示了所有可能的鏈結。
14
MMPA [36]:
MMPA [36]指出,當新的行動用戶進入網路,預測系統中對於該用戶的移動記錄 (Mobile Trace)相當稀少,由於並無太多參考資料,此時若實施基於用戶歷史紀錄的 行動預測便會發生困難,因而此研究提出一個針對網路中新用戶行為預測的方案,利用 改良式的馬可夫模型(Markov-based Mobility Prediction Algorithm, MMPA)來實現。
此方案考量該新用戶所處之行動網路的特性及傳播條件(Propagation Conditions), 並將 Cell 的訪問頻率(Visit Frequency)納入預測系統, 此外為了降低兵乓效應(Ping Pong Handover)的影響,設置一門檻值使預測結果更加精確;進行預測時,預設使用二 階馬可夫模型估測,但需檢查系統中是否有足夠的移動記錄可參考,若資訊不足,便改 用 一 階 馬 可 夫 模 型 。 此 方 案 並 透 過 真 實 的 移 動 記 錄 , 包 括 網 路 可 用 性 ( Network Availability)、通訊訊號等級(Signal Levels)、手機內容資訊(Context Information) 等,來驗證其方案的預測表現,約有將近 70%的準確度。
Bo's Scheme [37]:
Bo's Scheme [37]利用隱藏式馬可夫模型(Hidden Markov Model, HMM),以子網路 (Subnet)覆蓋區域的訊號強度值作為預測條件,預測行動節點未來可能存取的子網路, 並在 Figure 2.9 的圓形場景中進行模擬分析,A 到 E 是帄均分配在場景最外側的存取路 由器(Access Router, AR),中間的彎曲實線代表行動節點的可移動路徑,在隨機的間隔 時間測量行動節點到存取路由器的距離,以此作為行動節點移動時的隨機度,若隨機度 提升,該系統的預測準確率便會大幅下降,並未真正考慮節點的移動性。
15
Hsu's Scheme [38]:
Hsu's Scheme [38]在蜂巢式網路中,透過隱藏式馬可夫模型來分析行動用戶移動或 停留的狀態,及用戶在該 Cell 中使用的服務,以資料探勘(Data Mining)技術找出用戶 的行為樣式,藉此推斷行動用戶在每個 Cell 可能的狀態,其系統模型如 Figure 2.10 所示; 以自行產生的資料數據作為真實數據(包括行動用戶的移動狀態與在 Cell 中使用的服務 等)來進行比對驗證,實驗分析結果,用戶下一個移動或停留的 Cell 準確率時,可觀察 到其命中率隨著參考資料筆數增加而提升,約在 65%左右,但對於節點的狀態傴考量移 動或停留兩種情況,節點移動性在系統中傴由簡單的上下左右表現,較不適用於具備節 點高移動性的 VANET 中。
Figure 2.10:System Scenario of Hsu's Scheme [38]
以上所述行動預測機制的各項比較,包含預測原理(Basic Principles)、預測對象 ( Prediction Objects )、 有 無 真 實 移 動 性 考 量 ( Mobility Consideration )、 預 測 策 略 (Prediction Strategy)、執行預測者(Who do Prediction)、有無具備 GPS 或數位地圖, 以及進行預測的環境(Target)等方面整理於 Table 2.2 中,表格最後並加入本文所提出 之預測機制(簡稱 MPV2R)加以比較。
17
2.4 適用於資料遞送之路由協定
本章介紹用於資料遞送的路由協定,以能夠適用車輛高移動特性、維持資料遞送品 質為考量,包含了在都市街道環境中遞送資料的 VADD [23]、透過備份路徑維持資料遞 送穩定度的 AOMDV [39]與適用於 V2R 通訊模式的 AODV+ [40],其中 VADD 的介紹詳 見第 2.3.3 節,其他兩者分別描述於於第 2.4.1 節與第 2.4.2 節。
2.4.1 AOMDV
此機制由 M.K. Marina 等人提出 [39],又稱多條路徑(Multipath)架構,基於 AODV [41]路由協定為基礎,期望通訊過程中,每個行動節點皆具備數條可供資料遞送的路徑, 並以發送多個 RREQ 封包來維持備份路徑的尋找。在 AOMDV 路由機制中,每當行動 節點首要的資料遞送路徑斷裂,便能由備份路徑繼續傳送資料,其架構分別維護了主要 路徑(Primary Path)與備份路徑(Backup Path),前者由行動節點用來作為主要傳遞資 料的路徑,後者的功用在加強遞送路徑的穩定度,因此 AOMDV 的路由表欄位中,新增 一個「Route List」欄位,用以儲存每個行動節點不同的路徑資訊及到達目的節點所需的 Hop 數目,如 Figure 2.11 所示之 AOMDV 與 AODV 路由表欄位比較圖。
18
2.4.2 AODV+
此機制由 A. Hamidian 等人所提出 [40],設計來用於無線網路環境中,具備基礎建 設(如基地台等)的通訊環境,行動節點與基礎建設之間的資料遞送,透過 AODV+來 處理,基本架構由 AODV 路由協定改良而來,每個行動節點將會透過閘道器(Gateway) 與基礎建設連接的有線網路進行通訊,因此 AODV+提出三種方式來尋找 Gateway,如 下所述: 被動尋找 Gateway(Reactive Gateway Discovery):即以 On-Demand 的方式來尋找 Gateway,當來源節點有連線需求時,才由行動節點建立及維護與 Gateway 之間的 路由資訊,其缺點是在行動節點尚未失去與當前服務 Gateway 的連線前,即使周遭 有其他可用的 Gateway,亦無法啟動換手程序。
主動尋找 Gateway(Proactive Gateway Discovery):由 Gateway 會主動發送廣播訊 息(Gateway Advertisement message, GWADV message)提供給行動節點,其缺點是 若處於負載較重的網路環境,容易造成網路中的訊息氾濫 Flooded)。
混合式 Gateway 尋找(Hybrid Gateway Discovery):結合上述兩種 Gateway 尋找 方式,當行動節點位於 Gateway 週遭特定範圍外,便使用主動尋找的方式,行動 節點則透過被動尋找的方式來獲取 Gateway 的相關資訊。 由於車載網路拓樸動態改變的特性,使用被動尋找 Gateway 的方式較不會造成無謂 的訊息浪費與網路負擔,因此本文中針對 AODV+的被動尋找 Gateway 方式來作討論。 AODV+的系統架構如 Figure 2.12 所示,實線的代表有線網路,實線終端的圓形點代表 Gateway,方形代表基礎建設節點如路由器或有線網路中的主機,散布在環境中的黑點 則代表了行動節點。
19
Figure 2.12:Screenshot of the system scenario [45]
2.5 隱藏式馬可夫模型(HMM)
2.5.1 HMM 模型概述
隱藏式馬可夫模型(Hidden Markov Model, HMM)是一種統計機率模型,用來描述 一個含有隱含未知參數的馬可夫模型,透過觀察可觀測的參數,來推估此模型中的隱含 參數。如 Figure 2.5 所示,S1至 SN為隱含、無法立即觀測出的狀態,稱之為隱藏狀態 (Hidden States),O1至 ON則代表了可觀測出的狀態,又稱為觀察值(Observations), 每個狀態之間可以互相轉換,具有狀態轉移機率(States Transition Probabilities),在每 個狀態其可能的觀察值輸出上亦有一個觀察值產生機率(Emission Probabilities),透過 觀察值組成的序列,可以得知狀態間的轉換情形 [42]。 一般的馬可夫模型傴有可能的狀態與狀態之間的轉換這兩種元素組成,其狀態之間 的轉換機率便是所有的模型參數;而隱藏式馬可夫模型具備兩種機率,分別為狀態轉移 機率與觀察值轉換機率,如上段所述,可藉由分析觀察值的輸出序列,來得知無法直接 觀測的隱藏狀態資訊,因此隱藏式馬可夫模型常被用於分析各種序列資料,如人工智慧、 生物信息學、解基因序列、語音識別等 [43]。
20
在本文中,使用隱藏式馬可夫模型來描述車輛在網路系統中的移動情形,藉此建立 車輛未來位置的行動預測模型。假設隱藏式馬可夫模型所考慮的參數越詳盡,並設計良 好的狀態轉移圖,其模擬及預測的結果便會更接近真實結果。
Figure 2.13:A HMM Model [13]
2.5.2 HMM 模型元素定義
隱藏式馬可夫模型由五項元素所組成,分別為隱藏狀態、觀察值、狀態轉移機率、 觀察值產生機率與初始狀態機率,分別描述於下 [44]: (1) 隱藏狀態(Hidden States):代表實體的資訊,狀態與狀態之間會互相轉換, 每一個狀態都有可能由其他狀態轉換而來,以集合 S 表示。 (2) 觀察值(Observations):每一個狀態都有其相對應的觀察值,不同的狀態會 對應到不同的觀察值,可代表不同狀態下可能會發生的行為,以集合 O 表示。 (3) 狀態轉移機率(States Transition Probabilities):狀態與狀態之間的轉換存在不同的轉移機率,前一個狀態到下一個狀態的轉移機率,以集合 A 表示。 (4) 觀察值產生機率(Emission Probabilities):不同狀態到觀察值之間會有不同
的觀察值產生機率,以集合 B 表示。
(5) 初始狀態機率(Initial State Probabilities):系統時間初始時,每個狀態具有 一初始機率,以集合Π 表示。
21 馬可夫模型尤其適合用於分析過往大量歷史資料,並依據過往資料評估觀測的結果, 推導出未來可能發生的事件機率,因此也被常被利用於估測網路中行動節點的行為預測, 例如第 2.3.3 節所述之 MRP [24]便是以一個簡單的馬可夫更新過程來預測行動節點未來 可能進入的 Cell,MMPA [36]則在系統中行動節點可供預測的參考資料較少時,利用馬 可夫模型來預測節點未來可能進入的 Cell。 倘若欲考慮的預測條件中,具有無法立即觀測出的事物,即隱含參數的存在,便可 透過隱藏式馬可夫模型來探討,其能利用系統中可觀測的其他參數,來推估隱含參數的 資訊並加以分析,能夠使得預測的結果更精確,如第 2.3.3 節所述之 Prasad’s Scheme [13] 藉此預測行動節點未來可能連接的 AP、Bo’s Scheme [37],藉此預測行動節點未來可能 存取的子網路、Hsu’s Scheme [38]藉此預測行動節點未來可能進入的 Cell 等。因此本文 亦選用隱藏式馬可夫模型來建立行動預測機制,針對在街道環境中行駛的車輛未來的可 能位置進行預測。
22
第 3 章、研究方法
本章針對本文所提出的研究方法加以說明,第 3.1 節將描述整體系統的架構,包含 系統模型、網路架構與各組成元件之介紹;第 3.2 節將描述研究方法的流程,包含在不 同情況下的訊息傳遞流程與步驟說明;第 3.3 節將描述預測機制的細節,包含作為預測 條件參考的 Mobility Model 與 Mobile Trace 介紹、預測模型中的各項元素定義、預測模 型建立的過程與預測方法的敘述等。
3.1 系統架構
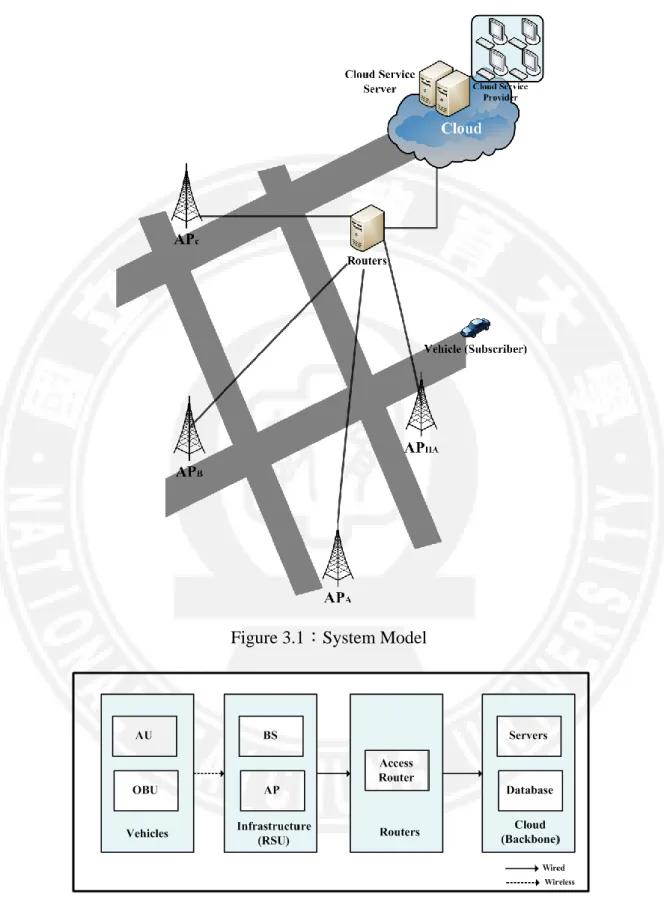
考量都會(Urban)或校園(Campus)環境,當車輛在道路之上行駛,車輛中的行 動用戶欲取得先前所訂閱的雲端服務時,可透過路邊的鄰近基地台連線至雲端而取得服 務,本文的系統模型(System Model)如 Figure 3.1 所示,網路架構則如 Figure 3.2 所示。 系統組成主要分為基地台、雲端與車輛與三個部分討論:
(1) 基地台:
路邊裝置(Road Side Units, RSU)是最常見的基礎建設,可能由不同通訊技術 的基地台所組成,如 WiFi 的 AP(Access Point)、WiMAX 或 Cellular 的 BS(Base Station)等,車輛可透過這些基礎建設連線至雲端網路。系統中以 AP 作為代表討 論;基地台可透過其所連接的路由器(Routers)與雲端網路連接,並將來自基地台 的資料封包傳遞至雲端網路,亦會將來自雲端的資訊轉送至基地台。路由器作為基 礎建設與雲端網路的中繼點,可連接各種不同性質的網域或網路系統,通常包含了 有線或無線的路由器,本系統中針對有線路由器做討論。 Figure 3.1 中的基地台連接到同一個路由器,因而皆由該路由器所連繫的同一 組雲端服務伺服器(Cloud Server)所管理。系統中假設路由器知悉其下各基地台 的位置,而所有基地台皆具備該特定範圍內的數位地圖(Digital Map),且彼此知 悉各基地台的地理位置;當車輛進入基地台訊號涵蓋範圍,可透過主動要求連線或 接收基地台廣播的方式,與基地台建立連線,並進行註冊程序,此時基地台會依據
23
車輛回傳的訊息,記錄車輛的行動資訊,如車輛識別碼、進入網路的時間點、行進 方向與車速等,並將之傳遞到後端的雲端網路伺服器中。而車輛進入系統時,第一 個註冊並建立連線的基地台便認定為該車輛的代理基地台(Home Agent, HA),代 理基地台會維護該車輛的相關資訊如使用 IP 與當前位置等。 (2) 雲端(Cloud): 由許多作為伺服器(Servers)的核心電腦、資料庫(Database)等資訊設備所 組成的骨幹網路(Backbone),藉此進行雲端運算工作,並可提供使用者(如車輛上 的行動用戶)各類服務訂閱,諸如交通安全資訊服務、全面性最佳路徑規畫、特定 區域商業廣告或民生資訊服務(如區域性差異或經常性波動的資訊如加油站價格、 店家優惠等)等。
本系統中的雲端伺服器又稱為雲端服務伺服器(Cloud Service Server),主要負 責接收及計算其負責區域內的服務請求並回傳計算結果,儲存、彙整各項服務的相 關資訊並定期更新;可依據行動用戶是作為服務訂閱者(Service Subscriber)或資 訊提供者(Service Provider)的角色,分別向車輛進行 Pull 或 Push 資訊的互動;在 本系統中則針對雲端伺服器 Push 服務資訊給車輛上的行動用戶此部分做探討。
系統中並假設雲端服務伺服器(Cloud Service Server)知悉並維護其負責區域 內的基地台清單及相關資訊(基地台地理位置、識別碼與連線能力等)。
(3) 車輛(Vehicles):
由應用單元(Application Units, AU)及車載單元(On-Board Units, OBU)所組 成,前者可能是連接到車輛上的裝置如筆記型電腦、PDA、智慧型手機等,後者 裝置於車輛上,具備無線及有線的通訊能力,視其所支援的通訊介面能與不同的 網路技術(如 WiFi、WiMAX 或 Cellular 等)進行通訊。 行駛於雙向道路上的車輛,可視行動用戶需求做為資訊提供者(Service Provider) 或服務訂閱者(Service Subscriber)的角色,前者可回報交通資訊等訊息給雲端, 而在本系統中針對服務訂閱者──即訂閱雲端服務的行動用戶做討論,並假設每台 車輛皆具備數位地圖、GPS 系統與 WiFi 的通訊介面。
24
Figure 3.1:System Model
25
3.2 方法流程
本文提出的方法,描述收得到基地台訊號的車輛,做為一服務訂閱者(Subscriber) 角色的情況,再細分為以下兩個 Phase 進行探討,首先依據車輛初進入網路系統時,如 何尋找並與基地台建立連線,描述於 Phase 1.1 及 Phase 1.2;車輛與基地台建立連線後, 如何在行進間持續取得雲端服務,描述於 Phase 2.1 及 Phase 2.2。各 Phase 的情境說明如 下所列:
(1) Phase 1(AP Discovery):車輛進入新的網路系統中時,可由車輛主動送出連線 請求,或接收基地台週期性的廣告信(Advertisements),來向基地台註冊並建 立通訊連線,此兩種方式分別描述於 Phase 1.1 及 Phase 1.2。
(2) Phase 2(Get Service):車輛完成向基地台的註冊程序,並成功建立通訊連線後, 便可向基地台發送包含服務名稱的資訊請求,但由於車輛持續的移動,服務取 得過程中可能會離開當前服務的基地台,針對車輛是否在服務取得之前便與當 前基地台中斷連線,此兩種情境分別描述於 Phase 2.1 及 Phase 2.2。
3.2.1 訊息交遞流程
(1) AP Discovery:其中,行駛於道路上的車輛可透過主動請求或接收鄰近基地台 廣播訊息的方式連上網路而取得雲端服務,車輛進入系統第一個連線的基地台 將作為其代理基地台(Home Agent),負責管理維護該車輛當前的位置等資訊。 Phase 1.1:此訊息交遞流程如 Figure 3.3,描述如下: Step 1: 車輛進入網路系統,主動發送連線請求封包,偵測其通訊範圍內 是否有可提供服務的基地台存在;收到車輛連線請求訊息的基地 台,回傳訊息給車輛,接著基地台與車輛進行註冊(Registration) 程序。 Step 2: 提供服務的基地台將車輛的相關資訊如位置、連線時間、IP、車 輛識別碼(如 MAC 資訊),及基地台識別碼傳送至 Router。26
Step 3: Router 將收到的上述資訊回傳到雲端伺服器,以作為行動預測的 參考依據。
Step 4: 雲端伺服器接收到該車輛及其連線基地台的相關資訊後,啟動行 動預測程序(Mobility Prediction Process),依照車輛當前位置及 先前的移動軌跡、連線過的基地台清單等條件,計算車輛下一個 可能連線的目標基地台。
Step 5: 雲端伺服器發送預先配置連線通知(Pre-configuration Notification) 至目標基地台,目標基地台為該車輛事先配置連線及預留資源。 Step 6: 車輛繼續行駛,待離開當前連線基地台的服務範圍後,便會與預
先配置妥資源的目標基地台進行連線,繼續取得雲端服務。
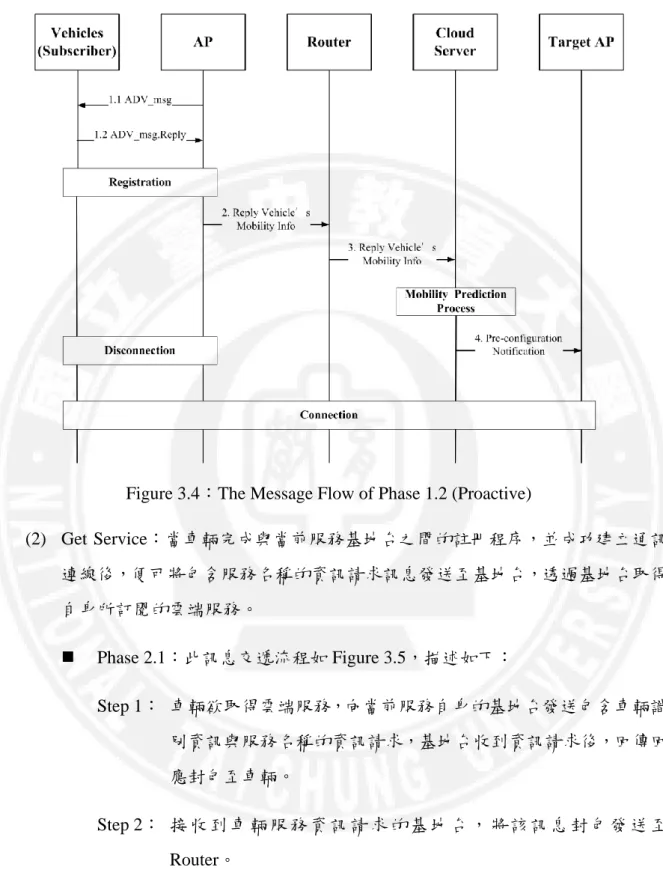
27 Phase 1.2:此訊息交遞流程如 Figure 3.4,描述如下: Step 1: 基地台週期性廣播包含自身相關資訊(如服務等級、訊號能力等) 的廣告信(Advertisements)到網路系統中,車輛接收到基地台 的廣告訊息,便傳送回應封包至基地台,接著與基地台進行註冊 (Registration)程序。 Step 2: 提供服務的基地台將車輛的相關資訊如位置、連線時間、IP、車 輛識別碼(如 MAC 資訊),及基地台識別碼傳送至 Router。 Step 3: Router 將收到的上述資訊回傳到雲端伺服器,以作為行動預測的 參考依據。 Step 4: 雲端伺服器接收到該車輛及其連線基地台的相關資訊後,啟動行 動預測程序(Mobility Prediction Process),依照車輛當前位置及 先前的移動軌跡、連線過的基地台清單等條件,計算車輛下一個 可能連線的目標基地台。
Step 5: 雲端伺服器發送預先配置連線通知(Pre-configuration Notification) 至目標基地台,目標基地台為該車輛事先配置連線及預留資源。 Step 6: 車輛繼續行駛,待離開當前連線基地台的服務範圍後,便會與預
28
Figure 3.4:The Message Flow of Phase 1.2 (Proactive)
(2) Get Service:當車輛完成與當前服務基地台之間的註冊程序,並成功建立通訊 連線後,便可將包含服務名稱的資訊請求訊息發送至基地台,透過基地台取得 自身所訂閱的雲端服務。 Phase 2.1:此訊息交遞流程如 Figure 3.5,描述如下: Step 1: 車輛欲取得雲端服務,向當前服務自身的基地台發送包含車輛識 別資訊與服務名稱的資訊請求,基地台收到資訊請求後,回傳回 應封包至車輛。 Step 2: 接 收 到 車 輛 服 務 資 訊 請 求 的 基 地 台 , 將 該 訊 息 封 包 發 送 至 Router。 Step 3: 收到該服務資訊請求訊息封包的 Router,將之轉送至雲端伺服 器。
29 Step 4: 雲端伺服器接收該服務資訊請求後,於後端網路中尋找該車輛訂 閱之服務,並將相關服務資訊發送回 Router。 Step 5: Router 接收雲端回傳的相關服務資訊後,將之轉送至傳來服務資 訊請求的基地台。 Step 6: 基地台接收相關服務資訊後,將之遞送給車輛。
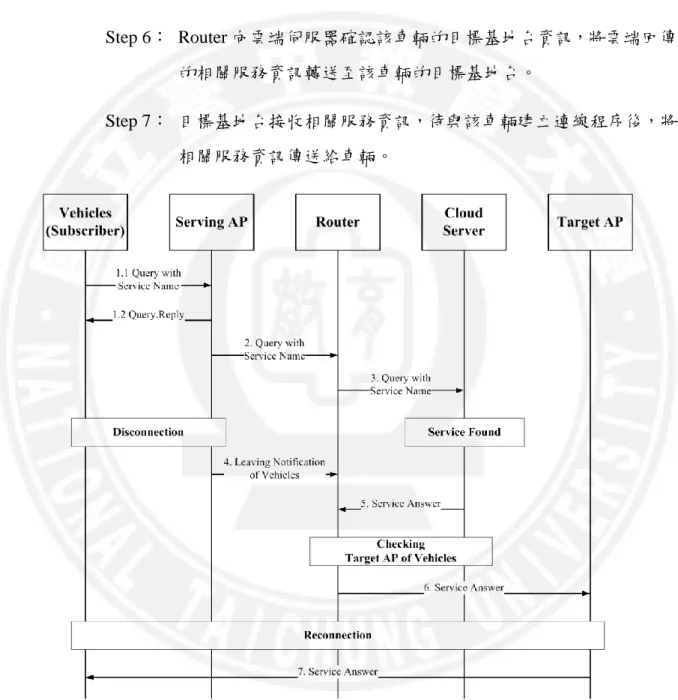
Figure 3.5:The Message Flow of Phase 2.1 (Stay) Phase 2.2:此訊息交遞流程如 Figure 3.6,描述如下: Step 1: 車輛欲取得雲端服務,向當前服務自身的基地台發送包含車輛識 別資訊與服務名稱的資訊請求,基地台收到資訊請求後,回傳回 應封包至車輛。 Step 2: 接 收 到 車 輛 服 務 資 訊 請 求 的 基 地 台 , 將 該 訊 息 封 包 發 送 至 Router。 Step 3: 收到該服務資訊請求訊息封包的 Router,將之轉送至雲端伺服 器。
30
Step 4: 此時車輛離開當前服務自身的基地台通訊範圍,當前基地台將車 輛離開的通知訊息(Leaving Notification)發送至 Router。 Step 5: 雲端伺服器接收該服務資訊請求後,於後端網路中尋找該車輛訂 閱之服務,並將相關服務資訊發送回 Router。 Step 6: Router 向雲端伺服器確認該車輛的目標基地台資訊,將雲端回傳 的相關服務資訊轉送至該車輛的目標基地台。 Step 7: 目標基地台接收相關服務資訊,待與該車輛建立連線程序後,將 相關服務資訊傳送給車輛。
31
3.3 The Proposed Mobility Prediction Scheme
3.3.1 Mobility Model 與 Mobile Trace
本文所提出之行動預測模型,以預測行動用戶的方式,透過計算行動過程中狀態轉 換的機率,搭配行動觀測數據(Mobile Trace),來模擬真實的行車環境。
行動狀態轉換主要分為三種,即左轉、右轉與直行,而三種狀態之間的初始轉換機 率(Initial State Transition Probabilities)則參考自曼哈頓移動模型(Manhattan Mobility Model)[45]中每個路口的轉彎機率,搭配行動觀測數據(Mobile Trace)中所提供的資 訊,以行動過程中用戶分別到達環境中各基地台之機率,做為可觀測狀態產生機率 (Observation Generation Probabilities),使得預測結果更加貼近真實的行車環境。 (1) Mobility Model:
由於 VANET 中的行動用戶可能會由於道路上的交通壅圔情況而產生車速忽快 忽慢情形,即所謂的高移動性(High Mobility),亦會由於行駛環境(如鄉間道路、 高速公路與市區街道等)的不同而有相異的移動模式,因此傳統指定行動用戶移動 路徑的方式,並無法真正表現 VANET 中行動用戶的移動。透過模擬真實世界行動 用戶移動模式(Mobility Pattern)的 Mobility Model,較能使行動用戶的移動性接近 真實,有關指定行動用戶路徑及使用 Mobility Model 的比較驗證詳見第 2 章節相關 研究中,Pattern matching [25]的說明。
較符合於 VANET 環境的 Mobility Model 有高速公路移動模型(Freeway Mobility Model)與曼哈頓移動模型(Manhattan Mobility Model)[45],由於本文就 都會環境進行探討,因此選用模擬都市街道環境行動用戶移動模式的曼哈頓移動模 型。曼哈頓移動模型的示意圖如 Figure 3.7 所示,由數條橫向與縱向的道路組成的 一都市街道地圖,行動用戶將沿著雙向道路隨機的移動,在每一時間點皆可能具有 不同的行進速度與加速度,當行進至交叉路口,行動用戶將會於每個路口左轉、直 行或右轉。
32
Figure 3.7:Example of Manhattan Mobility Model [45] (2) Mobile Trace:
行動預測模型所搭配的 Mobile Trace 為校園環境中行動用戶與路邊基礎建設連 線的歷史記錄,包含了行動用戶連線的起始時間、持續時間與連線位置等資訊, Mobile Trace 的記錄範圍如 Figure 3.8 所示,記錄內容如 Table 3.1 所列,上述資訊 來自於 MobiLib [46]於 2005 年的觀測記錄,記錄結果主要分為三個檔案:Session traces、DHCP log 與 Traps file。
其中,Session traces 記錄了每條 Session 的動作(即開始或結束)的日期、時 間,及行動用戶所使用的虛擬 IP 位址;DHCP log 記錄了分配虛擬 IP 位址的日期、 時間,及每個虛擬 IP 位址所對應到的行動用戶 MAC 位址;Traps file 則記錄了每個 行動用戶 MAC 位址建立連線時的日期、時間,及當時所連接的基地台 IP 與使用的 port。透過這些資訊,可推斷出特定行動用戶與不同基地台建立連線的可能機率, 並於本文中用於行動預測模型的建立。
Table 3.1:Detailed Description of the Mobile Trace Content
Mobile Trace Trace Content
Session traces Date, Time, Action, IP DHCP log Date, Time, IP, MAC
33
Figure 3.8:USC Wireless Coverage [46]
3.3.2 預測模型元素定義
本文所建立的行動預測模型以隱藏式馬可夫預測模型(Hidden Markov Model, HMM) 為基礎,結合曼哈頓移動模型(Manhattan Mobility Model)與行動觀測數據(Mobile Trace) 針對行車環境進行參數調整。行動預測模型中所使用的元素如 Table 3.2,詳述如下: (1) 狀態(States):車輛於每個路口所決定的行車方向,包含了左轉(Turn Left)、右
轉(Turn Right)與直行(Go Straight)三種。在本預測模型中的狀態並非立即可見, 因此狀態是隱藏的,以 S 表示。
(2) 觀察值(Observations):行動預測模型中狀態的產出值(Output Possible Symbols), 代表該狀態下可能進行的行為,在本預測模型中以 O 表示,其內容包含以下三項: 車輛每次左轉後離其最近的基地台 A。
車輛每次直行後離其最近的基地台 B。 車輛每次右轉後離其最近的基地台 C。
(3) 狀態轉換機率(States Transition Probabilities):表示當前狀態與下一個狀態之間 的轉換帄均機率,共包含了{左轉→左轉、左轉→右轉、左轉→直行}、{右轉→左
34
轉、右轉→右轉、右轉→直行}、{直行→左轉、直行→右轉、直行→直行}。狀態 轉換機率可依狀態的個數產生相對應的狀態轉換矩陣(States Transition Matrix),若 有 M 個狀態,便可產生 M*M 大小的狀態轉換矩陣,在本預測模型中有三個狀態, 因此可產生一個 3*3 的狀態轉換矩陣,以集合 A 表示。 (4) 觀察值產生機率(Emission Probabilities):表示狀態下各觀察值的機率,例如左轉 狀態下,在本系統中可能到達三個鄰近基地台,對於每個基地台都有個別一個產生 機率,共包含了左轉狀態:{鄰近基地台 A、鄰近基地台 B、鄰近基地台 C}、右轉 狀態:{鄰近基地台 A、鄰近基地台 B、鄰近基地台 C }、直行狀態:{鄰近基地台 A、鄰近基地台 B、鄰近基地台 C }。觀察值產生機率可依狀態及觀察值的個數產生 一觀察值機率矩陣(Emission Probabilities Matrix),若有 M 個狀態與 N 個觀察值, 可產生 M*N 的觀察值機率矩陣,在本預測模型中有三個狀態及三個觀察值,因此 可產生一個 3*3 的觀察值機率矩陣,以集合 B 表示。
(5) 初始狀態機率(Initial State Probabilities):在時間初始時,每個狀態皆有一個狀態 機率,以集合Π 表示。
Table 3.2:Elements of HMM Model [42]
The set of Hidden States
The set of all output possible symbols (observations)
State Transition Probabilities,
Emission Probabilities,
Initial State Probabilities,
3.3.3 預測模型建立
本文的行動預測機制以隱藏式馬可夫模型(Hidden Markov Model, HMM)為基礎來 實現。在傳統的馬可夫模型中,行動狀態對於觀察者來說是顯而易見的,其狀態的轉換 機率(State Transition Probabilities)即是全部的參數;而在隱藏式馬可夫模型中,狀態 並不是完全直接可見的,只有受狀態影響的部份變數是可觀測的,每個狀態在可能產出
35 的觀察值(Observations)上都有獨立(Independent)的機率分佈,也就是說,透過觀察 值序列的資訊,可以得知這些隱藏狀態的相關訊息。 在本文提出的行動預測模型中無法立即觀測出的隱藏狀態(Hidden States),為車輛 在每一個路口改變行車方向的狀態,包含了左轉、右轉與直行。此三種狀態之間會互相 轉換,而狀態之間轉換的初始轉換機率則參考自以表現都市街道型態的曼哈頓移動模型 (Manhattan Mobility Model)的路口轉彎機率。而系統中可觀測出的觀察值(Observations) 分別為車輛每次左轉後離行動用戶最近的基地台 A、每次直行後離行動用戶最近的基地 台 B 與每次右轉後離行動用戶最近的基地台 C。 其中,基地台 A、B、C 並非固定的特定基地台編號,而傴分別代表「車輛左轉後 離其最接近的基地台、車輛直行後離其最接近的基地台、車輛右轉後離其最接近的基地 台」,實際上的基地台編號會隨著車輛每一次的轉換方向而改變,以 Figure 3.1 的系統架 構圖為例:車輛在第一個路口左轉後與離其最接近的基地台 A 連線,接著於第二個路口 再次左轉,與此時離其最接近的基地台 A 連線,上述所提到的第一個基地台 A 代表了 實際上網路系統中的 APHA,而第二個基地台 A 代表了實際上網路系統中的 APA。 假設車輛在街道上隨機移動時,其狀態與狀態之間共有九種狀態轉換機率,分別如 下所述:車輛在路口左轉後接著又左轉的帄均機率為 a11、左轉後接著向前直行的帄均 機率為 a12、左轉後接著右轉的帄均機率為 a13、在路口直行後接著左轉的帄均機率為 a21、 直行後接著繼續向前直行的帄均機率為 a22、直行後接著右轉的帄均機率為 a23、在路口 右轉後接著左轉的帄均機率為 a31、右轉後接著向前直行的帄均機率為 a32、右轉後接著 又右轉的帄均機率為 a33。 此外,上述三個狀態分別都有其相對應的觀察值,若網路系統中有 N 個基地台,那 麼左轉狀態下,車輛可能會到達實際上網路系統中的 APA、APB、…、APN,對於這些 可能到達的基地台,各自有一觀察值產生機率(Emission Probabilities),分別為 b11、b12、…、 b1N;在直行狀態下,對於這些可能到達的基地台,各自的觀察值產生機率,分別為 b21、 b22、…、b2N;在右轉狀態下,對於這些可能到達的基地台,各自的觀察值產生機率, 分別為 b31、b32、…、b3N。
36
綜合上述可繪製出相對應的狀態轉移圖,如 Figure 3.9 所示。
Figure 3.9:States Transition of Mobility Prediction Scheme
3.3.4 Mobility Prediction in HMM
本預測模型中,狀態之間的轉換關係,後一個狀態的轉換機率與前一個狀態的轉換 機率有關,如公式(3.1)所示,Pij表示由狀態 Si轉換成狀態 Sj之帄均轉換機率:
, where
(3.1)狀態初始機率(Initial State Probabilities)則如公式(3.2)所示,實際進行預測時,本 預測模型中的狀態初始機率是參考曼哈頓移動模型中的路口帄均轉彎機率:
, where
(3.2) 而狀態之間會互相轉換,狀態之間的狀態轉換機率(State Transition Probabilities) 如公式(3.3)所示,aij表示於時間為 ti時,由狀態 Si轉換成時間為 ti+1時的狀態 Sj之轉換 機率:
, where ,…,T
(3.3) 各狀態到各觀察值之間的觀察值產生機率(Emission Probabilities),則如公式(3.4) 所示,bij表示於時間為 ti時,由狀態 Si轉換為觀察值 Oh之轉換機率。re
(3.4)37
以上公式之參數設定詳見 Table 3.3,由左轉、右轉與直行組成的隱藏狀態、觀察值、 狀態轉換機率 aij、觀察值產生機率 bij所建立的完整行動預測模型關係圖,則如 Figure
3.10 所示。
Table 3.3:Parameters Setting
S
hidden States
O
Observations
Pij
Probability of State i to j
K
A
State Transition Probabilities
B
Emission Probabilities
T
time
h
38 系統中的觀察值(Observations)分別為車輛每次左轉、直行或右轉後所連線上的基 地台,假設系統中所有基地台的訊號涵蓋範圍、所能提供頻寬及服務等級條件皆相同, 為求連線服務品質穩定,車輛會以基地台訊號強度為考量,與最接近自身地理位置的基 地台建立連線;而隨著時間的推移,預測模型會產生一組觀察值序列(Observed Sequences),記錄了車輛上行動用戶移動的軌跡。前述可知,預測模型中的觀察值序列 與狀態息息相關,因此透過分析評估觀察值序列,便能對未來車輛可能發生的狀態進行 預測,以達行動預測的目的。 Figure 3.11 表示了一個行動預測結果的範例,如圖所示,箭頭的方向代表時間的推 移,每直行分別代表車輛在網路系統中隨機移動的過程中,遇到路口時三個可能的轉彎 狀態──左轉、右轉與直行,每個狀態中各自有一機率輸出值,機率數值越大代表車輛 處於該狀態的機率越高,第一直行中擁有最大機率的狀態為左轉,第二直行中擁有最大 機率的狀態為直行,第三直行中擁有最大機率的狀態為右轉,此結果可輸出一組預測狀 態序列為:{左轉→直行→右轉},依此推測結果,比對車輛在該時間點的地理位置及系 統地圖中的基地台配置情形,便可推算出車輛分別在該狀態下所連接的基地台序列。
39 當車輛進入網路系統中,與基地台建立連線後,回傳自身相關行動資訊給基地台, 基地台將車輛行動資訊回傳至雲端後,雲端伺服器便會啟動行動預測程序(Mobility Prediction Process),通訊過程中的訊息交遞流程請參閱第 3.2.1 小節,預測程序之細部 流程則敘述如下: Step1、車輛進入網路系統 if 車輛接收到基地台廣告訊息(Advertisements) then 車輛與基地台建立連線,傳送車輛行動資訊(包含位置、車速、車輛識別碼) else 車輛廣播連線請求封包 Step2、基地台接收到車輛行動資訊 if 基地台接收到車輛行動資訊 then 將車輛行動資訊、車輛行為資訊(包含該連線使用 IP、連線建立時間)與基 地台資訊(包含基地台位置、基地台識別碼、連接 Router 之 IP)作為預測參 考資訊透過路由器傳送至雲端 else 重新要求車輛回傳行動資訊 Step3、雲端接收到基地台回傳之預測參考資訊 if 雲端接收到預測參考資訊 then 將預測參考資訊彙整,比對數位地圖,彙整出車輛所連線之基地台位置,記錄 於觀察值序列中 else 重新要求基地台再次回傳預測參考資訊 Step4、雲端進行預測計算 if 雲端將預測參考資訊彙整完畢 then 產生 HMM 預測模型,輸入狀態轉換機率矩陣,輸入觀察值產生機率矩陣,依
![Table 2.1:Comparisons of Mobility Prediction Techniques [14]](https://thumb-ap.123doks.com/thumbv2/9libinfo/7458609.111258/17.892.103.790.287.863/table-comparisons-of-mobility-prediction-techniques.webp)
![Figure 2.3:System Scenarios of VADD[23] Figure 2.4:Delay Model of VADD[23]](https://thumb-ap.123doks.com/thumbv2/9libinfo/7458609.111258/19.892.114.764.802.1071/figure-system-scenarios-vadd-figure-delay-model-vadd.webp)
![Figure 2.6:Average Distance Prediction Error in Mobility Model [25] YL Tang’s Scheme [33]:](https://thumb-ap.123doks.com/thumbv2/9libinfo/7458609.111258/22.892.113.792.135.371/figure-average-distance-prediction-error-mobility-model-scheme.webp)
![Figure 2.8:All possible links after one movement [34]](https://thumb-ap.123doks.com/thumbv2/9libinfo/7458609.111258/23.892.103.783.464.927/figure-possible-links-movement.webp)
![Figure 2.10:System Scenario of Hsu's Scheme [38]](https://thumb-ap.123doks.com/thumbv2/9libinfo/7458609.111258/25.892.107.787.415.806/figure-system-scenario-of-hsu-s-scheme.webp)
![Figure 2.12:Screenshot of the system scenario [45]](https://thumb-ap.123doks.com/thumbv2/9libinfo/7458609.111258/29.892.107.787.123.883/figure-screenshot-of-the-system-scenario.webp)