1
行政院國家科學委員會專題研究計畫成果報告
脊髓損傷患者功能性電刺激系統之研發與應用(II)-子計劃三:頸髓損傷患者上肢功能性電剌激之研究
The Studies of Functional Electr ical Stimulation of Upper Extr emities for
Cer vical SCI Patients
計畫編號:NSC 88-2614-E-002-005
執行期限:87 年 8 月 1 日至 88 年 7 月 31 日
主持人:賴金鑫
執行機構及單位名稱: 國立臺灣大學復健科
E-mail: [email protected]
一、中文摘要 頸髓損傷造成之肢體麻痺往往會導致 病患嚴重的運動功能及日常活動功能喪 失。然而在傳統的復健治療下,頸髓損傷 病患的預後往往只能以殘存的肌肉功能來 決定。功能性電剌激利用電腦控制電剌激 肌肉,產生既定的動作,可以重建患者所 失去的功能。因此功能性電剌激成為現代 復健治療上,恢復失能者日常生活能力的 一種重要的工具。 本研究研究對象著重於頸髓損傷中最 常發生的 C5,C6 頸髓損傷病患。針對這些 病人的上肢功能設計功能性電剌激。第二 年主要為發展有迴饋控制之電剌激動作。 此套功能性電剌激系統包括一個由類神經 網路控制器,以提供系統給予患者合適的 剌激。此系統在實驗上得到初步的成功。 關鍵詞:功能性電剌激,頸髓損傷,四肢癱瘓 Abstr actThe loss of motor function of limbs in cervical cord injured patients always result in severe impairment of daily activities. In classical rehabilitation program, the outcomes of the cervical spinal cord injury (SCI) patients are determined by the residual motor function. The technique described as “functional electrical stimulation (FES)”, which stimulated paralyzed muscles by
computer to provide “extra” muscle power, could restore the motor functions of SCI patients. Therefore, application of FES system becomes an important modern rehabilitation methodology to restore the ADL functions of the disabled.
The common C5/C6 quadriplegic patients are selected as our subjects. Our goal is to use a FES system to restore the functions of their paralyzed muscles of upper limbs.
In the second year, a FES control system with feedback loop was developed for upper limbs. The FES system contained a diagonal recurrent neural network controller to provide suitable stimulation. The clinical evaluation of this FES system demonstrated the preliminary success.
二、緣由與目的 功能性電剌激(FES)是利用電剌激癱 瘓肢體的神經肌肉,使肌肉產生收縮,進 而產生功能上有用的動作。功能性電剌激 在復健上的運用首先是由 Liberson 等人用 於中風病人步行時的懸垂足(foot-drop)矯 正[1]。自此之後 FES 便用來重建中樞神經 病變或受傷的病人所喪失的功能。
脊髓損傷(Spinal Cord Injury, SCI)是因 為病人的脊髓受到外傷或其他病變導致四 肢及軀幹完全或不完全麻痺。而對不同位
2 置的受傷病患,會產生不同程度的功能喪 失。其中頸髓受傷的患者往往是這類患者 中功能受損最嚴重的一群。 在國內,已有臺灣大學電機工程研究 所及成功大學醫學工程研究所對此題目進 行研發。並已有成果發表於國內外之期刊 [2-4]。然而對於全身癱瘓的脊髓損傷患 者,目前國內並沒有研究者對此進行研 究;而在國外的相關研究仍有一些問題存 在,必須要解決。舉例而言,目前所能控 制的動作仍是十分地不自然,不能使病人 的心理接受;不容易有回饋的信號(如觸 覺、壓覺、溫度覺)… 。此外,由於專利 的問題,引進國內要花費大量的經費,不 符合成本的效益。 然而由於上肢的動作複雜,而且不同 程度的病人會有不同的功能喪失狀況,因 此複雜度相當地高。然而就上肢功能性電 剌激的臨床使用而言,最常見的是 C5 病人 在支架的輔助之下,達成手抓握的動作; 或是 C5,C6 病人在電剌激與支架的輔助 下,能使肘關節運動到定位。而其他的動 作將需要更複雜的控制與更多的肌肉以來 達成。 F E S con t r oller S t im u la t or com m a n d M u sc le M u sc le J oin t m ovem en t st im u li for c e a ssist ed b y or t h oses elect r od e elect r od e 圖 1 上肢功能性電剌激之方塊圖 因此,本計劃的目的在於:建立使用 功能性電剌激回復因頸髓損傷所造成之全 身癱瘓患者的上肢功能的臨床治療計劃。 本計劃主要的工作在於發展有迴饋控 制之電剌激動作。此套功能性電剌激系統 包括一個由對角化迴饋類神經網路
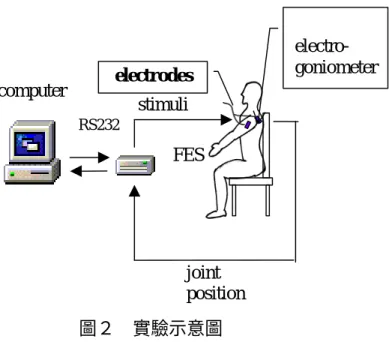
(diagonal recurrent neural network, DRNN) 所構成的控制器,以提供系統給予患者合 適的剌激。 三、研究方法與進行步驟: 本研究針對六位受試者的肩部動作進行 電剌激控制的臨床實驗。將 FES 使用於肩 部的肌肉群(deltoid, supraspinatus)以得到 所需要的肩部動作。圖一為 FES 動作控制 之示意圖。由個人電腦給予預先設計好的 軌跡,再以電子量角器(Model XM180, Biometrics Ltd.) 量取角度送回控制器,利 用控制器評估電子量角器與預設軌跡間的 誤差來 調整電流,並以 RS232 介面與電剌 激器溝通。 四、結果與討論 本計劃第二年所設計之關節角度控制 器,具有完全以類神經網路控制之功能性 電剌激的特性。本系統具有動態學習肌肉 的逆向非線性動態特性,作一前饋補償控 制,並同時可以線上修正控制器之類神經 網路參數。類神經網路的架構是採用對角 化迴饋神經網路架構,而 DRNN 是一種具 有自我線上學習能力,同時具有對系統過 去輸入記憶能力的網路,而由於 DRNN 將 隱藏層中的迴饋簡化,亦可以加快運算速 度。經訓練後可描述系統刺激電流與欲追 縱肘關節角度之非線性動態關係。同時, 以 DRNN 所構成的控制器與系統辨識器 (DRNN controller and identifier)可以分別對 系統進行辨識與分析的工作,真正達成實 際應用的功效。 表 1 為 DRNN 控制器與傳統的比例控 制器(proportional controller)比較的結果。角 度的均方差(RMS tracking)顯示在 0-25sec 有能力將肩關節穩定的控制到所需的角 度,而之後亦能將關節控制在穩定的角度 值。相對於比例控制器,其誤差值較小。 五、計畫成果自評 本計畫第二年主要的工作是發展具有 迴饋控制之電剌激動作。因此我們設計了 一個功能性電剌激系統,其中包括一個由 DRNN 為中心的類神經網路控制器,以提 供合適的剌激。在實驗上得到初步的成
3 功,其部份研究成果已發表於國際電機電 子工程師學會醫學工程學會大會上[4]﹐也 吸取許多寶貴經驗﹐完整的研究成果正積 極準備發表中。由於功能性電刺激應用於 上肢癱瘓患者的重要目標之一即是達到功 能性之動作,現階段的功能性電刺激行走 系統使用表面電剌激仍是一嚴重限制,本 研究往後將以目前的研究基礎,更進一步 研究利用植入式電極之功能性電刺激上肢 動作控制研究。未來本研究第三年仍將先 利用第二年得到初步成功的 DRNN 表面剌 激功能性電剌激器,合併支架,以同時控 制兩個關節的動作,並以動作分析儀加以 分析。以完全控制肘關節及手合握之動 作。而此功能性動作將可提供受試者日常 生活必需的一些簡單的功能性動作,並以 模擬實驗模擬其他複雜動作時之所需控制 波型情形,如此便可在安全無虞的狀況下 找出適合的刺激時序設計。其結果將可預 估不同動作時肌肉之電剌激量及提供功能 性電刺激上肢肌肉的電剌激控制器設計之 參考。 六、參考文獻 [1] H. J. Chizeck, R. Kobetic, E. B. Marsolais, J. J. Abbas, I. H. Donner, and E. Simon, "Control of functional neuromuscular stimulation system for standing and locomotion in paraplegics," Proc. IEEE, Vol. 76, No. 9, pp. 1155-1165, 1988.
[2] G-C Chang, J-J Luh, G-D Liao, J-S Lai, C-K Cheng, B-L Kuo, and T-S Kuo, “A neuro-control system for the knee joint position control with quadriceps stimulation,” IEEE Trans. Rehabil. Eng. Vol. 5, No. 1, pp.2-11, 1997.
[3] C-C Ku and K. Y. Lee, "Diagonal recurrent networks for dynamic systems control," IEEE Trans. Neural Networks. Vol. 6, No. 1, pp.144-156, 1995.
[4] J. J. Luh, G. C. Chang, J. S. Lai, C. K. Cheng, T. S. Kuo, and J. F. Lee “A diagonal recurrent neural network based FES system for the knee joint position control” in Proceeding of 1998 IEEE Conference of Medical and Biomedical Engineering Society,
4
圖2 實驗示意圖
表 1 以不同控制方法追蹤預設之角度變化軌跡之結果比較。表(a)為比例控制器控制之 結果,表(b)為 DRNN 控制器控制之結果。其中數字單位為度。
(a) Tracking to the desired motion of shoulder abduction by proportional controller
Time 0~50sec 0~25sec 25~50sec Subject RMS error STD RMS error STD RMS error STD
1 18.427 17.985 24.227 23.819 9.601 9.133 2 20.241 14.172 25.579 18.321 12.84 6.701 3 13.648 13.232 18.904 18.279 3.895 3.525 4 13.648 20.727 25.69 20.709 17.755 19.932 5 21.210 19.201 28.591 24.659 9.0715 8.357 6 13.715 13.278 19.198 18.571 2.771 2.031 Mean 16.815 16.433 23.698 20.726 9.322 8.280
(b) Tracking to the desired motion of shoulder abduction by DRNN controller
Time 0~50sec 0~25sec 25~50sec Subject RMS error STD RMS error STD RMS error STD
1 16.499 15.096 22.484 18.915 6.241 6.184 2 13.909 12.834 19.346 17.816 3.561 1.808 3 11.262 10.599 15.611 14.821 3.158 1.854 4 26.277 20.628 37.013 22.307 3.321 1.173 5 10.472 10.286 14.735 14.047 1.481 1.412 6 16.227 14.48 22.795 17.269 2.556 2.513 Mean 15.774 13.987 21.997 17.529 3.386 2.491 joint position computer electro-goniometer electr odes RS232 stimuli FES