Taiwan Journal of Geoinformatics Vol. 2, No. 1, pp. 23 ~ 41
車載光達點雲中直立圓桿之模塑
邱式鴻
1*吳志文
2 論文收件日期:102.08.09 論文修改日期:102.10.14 論文接受日期:102.11.04摘 要
隨著移動測繪系統(mobile mapping system, MMS)發展,車載光達系統可有效獲 取詳細路廊(road corridor)的三維點雲資料。由於車載光達系統紀錄大量的點雲資料 與複雜的路廊資訊,需經處理,才可模塑點雲中路廊的物件。其中,直立圓桿是路 廊資訊中重要地物的基本元件,故本研究發展模塑車載點雲中直立圓桿的演算法。 直立圓桿模塑的演算法必須面臨車載光達系統所蒐集的點雲無法完整涵蓋整個直 立圓桿表面,以及所蒐集的點雲不僅包含直立圓桿上的點、亦可能包含附著於直立 圓桿上的物件點(如廣告招牌等)等兩個重大的問題,意即這些點雲資料蒐集不完全 且包含許多雜訊。因此,本研究所發展的演算法中先以物空間資訊將車載點雲中的 地面點濾除並留下非地面點,其中地面點包含屬於路面與人行道上的點。接著,將 非地面點透過八分樹體元結構化(octree-structured voxel space)後,並以其相鄰性加以 群聚,進而組成非地面點之點群。由於直立圓桿上可能含有許多附著物(如廣告招牌 等),因此本研究發展以 RANSAC(RANdom SAmple Consensus)為基礎之演算法判斷 經前述處理聚集後之非地面點群是否包含直立圓桿,並計算其圓面參數。實驗結果 顯示在複雜的街景中,本研究所發展直立圓桿模塑之漏授率(Omission)為 31.8%、誤 授率(Commission)為 60.5%;各直立圓桿求定之圓面參數與人工量測之結果比較在 X 坐標方向的 RMSE 為 0.032m,在 Y 坐標方向 RMSE 為 0.046m,而半徑的 RMSE 則為 0.031m。
Modeling of Vertical Pole-Like Objects from
Vehicle-Borne LiDAR Point Cloud
Shih-Hong Chio
1*, Chih-Wen Wu
2Abstract
With the development of mobile mapping system (MMS), vehicle-borne LiDAR system can obtain precise 3D point cloud of the detailed road corridor efficiently. Because the vehicle-borne LiDAR system records numerous points cloud and complicated information of road corridor, those point cloud can be used in reconstructing the objects in road corridor after data preprocessing. In the objects of road corridor, vertical pole-like objects is one of most important and basic objects. Therefore, this study focuses on modeling vertical pole-like objects from vehicle-borne LiDAR point cloud. In the vehicle-borne point cloud, the data might describe vertical pole-like objects incompletely and might be always with many irrelevant points from the attached objects. First of all, the ground points will be filtered through scene knowledge. Then, the non-ground points will be clustered through the octree-structured voxel space and connected-component labeling (CCL) algorithm. In the clustering LiDAR points, they cannot describe complete vertical pole-like objects and some points might belong to attached objects. Therefore, the automatic algorithm based on RANSAC (RANdom SAmple Consensus) is developed to extract and model vertical pole-like objects from those clustering LiDAR points in this study. The result shows the omission of vertical pole-like objects by the modeling approach developed by this study is 31.8% and the commission of vertical pole-like objects is 60.5% under the complicated street environment. Moreover, the circle parameters of vertical pole-like objects, i.e. the coordinate of circular center and the circular radius, are compared with those measured manually in this study. The RMSEs in X, Y coordinate components are 0.032m and 0.046m, respectively. The RMSE of circular radius is 0.031m.
Keywords: Mobile Mapping, Vehicle-Borne LiDAR, Vertical Pole-Like Object
1 Associate Professor, Department of Land Economics, National Chengchi University. 2
Graduate student, Department of Land Economics, National Chengchi University.
一、前言
隨著 POS(Position and Orientation System)定位定向系統精度的提高,移動式測 繪系統(Mobile Mapping System, MMS)的發展越趨快速。POS 定位定向系統由慣性 導航系統(inertial navigation system, INS)及全球衛星定位系統(global positioning system, GPS)所構成,MMS 中結合 POS 並裝載各種蒐集空間資料的遙測感測器,包 含數位攝影機、相機、多光譜感測器、或雷射掃描儀等。其中又以裝載雷射掃描儀 的車載雷射掃描系統(又稱車載光達系統)能同時獲取大量點雲的 3D 坐標,使得後續 發展與應用越受重視。如 Optech Lynx Mobile Mapper V200 由具最大 200kHz 點發 射頻率(point repetition frequency , PRF) 與最遠掃描距離 200m 的 1~2 個掃描儀所組 成;3D Laser Mapping 公司的 StreetMapper 360 則使用具 300kHz PRF 與最遠掃描 距離 300m 的 1~2 個 RIEGL VQ-250 掃描儀所組成;芬蘭大地學會(Finnish Geodetic Institute)所發展的 FGI Roamer 則由具 120kHz 量測頻率的 Faro LS 880 掃描儀與 NovAtel HG1700 SPAN58 INS 系統所組成(Kukko et al., 2007);以及 RIEGL 的行動 掃描系統 VMX-250,強調其堅固耐用、是易於安裝的整合系統,車頂上方的平台 包括兩台 RIEGL 2D 雷射掃描儀 VQ-250、慣性導航裝置、全球衛星定位裝置,此 系統可安裝於任何車輛、船舶快速取得三維坐標資料。RIEGL VQ-250 掃描儀雷射 發射頻率為 300,000 點/秒,為全波形的雷射掃描儀器可進行 360 度掃描且能即時進 行波形分析獲取多回波資訊,其最大測距 500 m,精度 10 mm,掃描角度 360 度(迅 聯光電有限公司,2010)。西元 2004 年關於車載雷射掃描系統的回顧文獻可參考 (Schwarz and El-Sheimy, 2004),相關原理則可參閱(Petrie and Toth, 2009)。
車載光達系統可以直接獲取目標物三維點雲資料,因此可獲取詳盡的路廊(road corridor)資訊,對於道路環境的模式化與文件化(documentation)有相當助益。而所謂 道路環境文件化包含道路幾何和道路環境的文件化。道路幾何使用道路幾何設計參 數,如車速、車道數、車道寬、道路縱橫方向的坡度,道路鋪面材質等等來描述; 而道路環境則是指道路兩旁及其鄰近的相關地形地物包含建物、樹木、植栽、電力 線、交通號誌、燈桿等(Mumtaz, 2007)。建立完整的路廊資訊可應用於噪音模擬(noise modeling)、道路安全、道路及相關設施維護、定位服務(location-based services)及汽 車和行人導航,甚至發展未來駕駛協助系統(Future Driver Assistance System)(Brenner, 2009)。
由於車載光達系統紀錄大量的點雲資料與複雜的路廊資訊,需經處理後,才可 模塑點雲中路廊的物件。在本研究中將路廊資訊分成路面地物與路旁地物兩大類。 路面地物包含道路面、燈柱、電力桿、電線桿及交通號誌桿(含紅綠燈)等地物;路
因此如何由這些蒐集不完整且包含許多雜訊的點雲資料模塑直立圓桿狀物則是本 研究之重點。而目前國內對於車載光達系統點雲資料處理的研究甚少,比較相關的 研究是李育華(2009)於 2009 年分析探討車載移動式製圖系統之系統率定及其直接 地理定位之效能,但也僅就系統建構部分進行研究與探討,且其架設的感應器是數 位相機。因此以下針對國外對於車載光達點雲資料包含直立圓桿的燈柱、電力桿、 電線桿及交通號誌桿(含紅綠燈)路面地物萃取或模塑之文獻回顧。由於車載光達點 雲資料與地面光達點雲資料均屬於高密度的點雲資料,雖然兩者點雲資料的特性仍 有些差異,但由地面光達點雲萃取直立圓桿的演算法仍值得參考,因此以下文獻亦 回顧此類文獻。 首先是 Lehtomäki et al. (2010)提出由車載雷射掃描點雲自動萃取如交通號誌、 燈桿等擬桿狀物(pole-like)的演算法,所謂擬桿狀物意即交通號誌桿、燈柱及樹幹等。 由人工探討該演算法發現桿狀物的正確率是 77.7%、正確偵測率為 81.0%。該演算 法分成四階段,第一階段是掃描線分割,將每一掃描斷面上點雲分成相近的點群, 然後移除長點群,留下可能是掃過桿狀物的短點群。第二階段叢集點群產生候選桿 叢集(candidate pole clusters)。第三階段則是合併叢集成同一桿狀物。第四階段將候 選叢集分類成桿狀物與非桿狀物,使用於分類的特徵包含叢集的形狀、長度、方位 和點密度。大部分桿狀物和樹幹為圓柱或角錐狀則其具圓形橫斷面,因此可用已發 展由點雲中自動圓柱體偵測的方法偵測與萃取(Bolles and Fischler, 1981; Lukács et al., 1998; Chaperon and Goulette, 2001; Marshall et al., 2001; Rabbani and van den Heuvel, 2005; Schnabe et al. 2007; Luo and Wang, 2008);其中使用 Hough transform (Rabbani and van den Heuvel, 2005)、RANSAC (RANdom SAmple Consensus) (Bolles and Fischler, 1981; Chaperon and Goulette, 2001; Schnabel et al., 2007)和最小二乘法擬 合求其參數(Lukács et al., 1998; Marshall and Lukacs, 2001)。此外,Brenner(2009)假 設桿狀物是直立圓桿,掃描點出現在核心區,外側區域則無掃描點。由圓柱堆疊 (cylindrical stacks)分析其結構,直立圓桿則由某數量以上的堆疊圓柱體所構成。為 確定每一堆疊圓柱外區域確實無點,另外執行光線密度分析(ray density analysis)。 堆疊確認後則由區域的點推估直立圓桿的真正位置。Manandhar and Shibasaki(2001) 則由垂直掃描線得到的點雲資料中,由個別掃描線上偵測垂直直線段,進而偵測垂 直桿狀物。Chen et al.(2007) 提出由點雲和影像萃取交通號誌(traffic signs and signals) 的方法。先將點雲叢集成不同地物並將點叢集投影至垂直面,最後根據變方-協變方 矩陣(covariance matrix)分解的特徵值(eigenvalue)所得投影面的延長方向萃取桿狀體。 至於 Luo and Wang(2008)則是由地面雷射掃描所得之室內點雲資料快速萃取中國古 建築的柱狀體特徵,其作法是首先將點雲切出數個薄層並由薄層內的點雲辨識柱狀 特徵,然後取得柱狀體之投影參數,接著比較相鄰薄層局部的投影參數並將相似柱 狀體參數取得整體的柱狀體投影參數,最後模塑柱狀體。上述 Brenner(2009)、 Manandhar and Shibasaki(2001)和 Chen et al.(2007)所提出的模塑車載光達資料中直 立圓桿的方法均是針對較單純的直立圓桿,未強調若遇複雜場景時,尤其是桿狀物 上具其他附著物時,該如何處理,因此本研究除解決車載光達系統所蒐集的點雲無
法完整涵蓋整個直立圓桿表面的問題外,更重要的是解決所蒐集的點雲不僅包含直 立圓桿上的點、亦可能包含附著於直立圓桿上的物點(如廣告招牌等)的問題,以下 將介紹本研究之方法及步驟。
二、研究方法及步驟
由於車載光達點雲資料量相當龐大且經掃描而得之路廊地物點雲眾多且複雜, 因此本研究藉由引入物空間之路廊場景知識,分析車載光達點雲資料的特性並發展 由點雲資料自動萃取並模朔路廊中燈柱、電線桿及交通號誌中基本結構直立圓桿的 演算法。流程圖如圖 1 所示,以下詳細描述演算法的整個處理流程。 圖 1 車載光達點雲中直立圓桿模塑流程圖 (一) 車載光達點雲分段處理 首先,因為裝載光達系統之車子於蒐集點雲資料時必於道路上行駛,因此依據 車載光達系統上 GPS 所紀錄之車行軌跡,即可知路網之狀況(如圖 2);此外,燈柱、 電線桿及交通號誌中基本結構直立圓桿必位於路旁,因此為簡化後續之處理可先依 據 GPS 所紀錄之車行軌跡將點雲資料分段,接著再依據分段的車載光達點雲進行後 續處理發展演算法模塑直立圓桿。GPS 紀錄之車行軌跡分段是依據其所紀錄經緯度 坐標轉換成的 X、Y 坐標,計算其前後位置軌跡變化角度,將大於某一角度(如九十 度)視為分段點,如此一來即可將車行軌跡分段,並依據分段軌跡資料將點雲資料分 類供後續處理。 車載光達點雲分段處理 地面點濾除 非地面點雲結構化與分群 直立圓桿辨識與模塑圖 2 車載光達系統上 GPS 所紀錄之車行軌跡示意圖 (二) 地面點濾除 此步驟將分段點雲資料中之地面點雲濾除,這些點包含道路、人行道上的點雲, 其目的是簡化後續處理,即僅針對非地面點雲群聚處理,由群聚點雲中發展萃取直 立圓桿之演算法,因此本研究透過物空間路廊場景知識將地面點分離。而物空間路 廊場景中,顯示於車載光達掃描時所紀錄之車行軌跡為其重要之物空間知識,藉車 行軌跡資料可濾除地面點。以圖 3 為例,非地面點的高程一定大於地面點之高程, 可藉由車載光達掃描系統上 GPS 所紀錄之分段車行軌跡中的平均高程(ZGPS(i))以 及 GPS 天線的高度 h1(即圖 3 中 GPS(i)點至地面的垂直距離 h1)推算其約略之地面 高程 Z1,即 Z1 = Z(GPS(i))-h1。而地面點過濾的方式則是以車載光達分段點雲中各 點高程若小於推論之地面高程 Z1,就將其視為地面點予以濾除。 此外,由於包含燈柱、電線桿及交通號誌中基本結構的直立圓桿必位於道路兩 旁附近,因此再以離分段車行軌跡某一距離範圍外之約制排除離路旁較遠之點雲。 圖 3 地面點與非地面點濾除所用之物空間路廊場景知識圖示說明 (三) 非地面點雲結構化與分群
得到非地面點雲之後,其後使用八分樹(octree-structured voxel space)將非地面點 雲結構化,並使用 CCL(connected-component labeling)演算法(王淼,2011)將非地面 點雲結構化之體元群聚成點群。
其概念為將點雲以八分樹之方式結構化將點雲分割,組成數個三維網格,又稱 體元(voxel),如圖 4 所示。其後針對分割之體元,以 CCL(Connected-Component
Labeling)演算法判斷體元間之相鄰性,並將相鄰之體元予以合併,其中相鄰性有三 種,分別為 6 相鄰、18 相鄰、26 相鄰(如圖 5)。本研究經觀察實驗區內直立圓桿大 多含有附著物且鄰近於廣告招牌、路樹等,其間距約 2cm~20cm 不等,故設定體元 大小為 10cm 進行非地面點雲之八分樹結構化分割,然而此設定可能會導致點雲過 度分割,因此為減少過度分割之影響,於 CCL 將相鄰結構化之體元群聚成點群時 則採用 26 相鄰。 圖 4 八分樹之方式結構化與體元說明圖示(王淼,2011) (a)6 相鄰 (b)18 相鄰 (c)26 相鄰 圖 5 體元之相鄰性(王淼,2011) (四) 直立圓桿辨識與模塑 此階段處理是將前述非地面點雲結構化並群聚後的點群,根據物空間路廊場景 中直立圓桿物件知識(object knowledge)以 RANSAC 方法(Fischler and Bolles, 1981) 判斷群聚之點群是否包含直立圓桿,若包含直立圓桿點群則予以模塑。然現實中絕 大多數的直立圓桿上仍有其他附著物,導致偵測不易,如圖 6 為一屬於交通號誌的 直立圓桿,整支直立圓桿的 2/3 上部分有甚多之附著物,而 1/3 下部分雖有附著物, 但較少。因此本研究加入點群分層處理(Lou and Wang, 2008)的概念,將每分層內之 點雲投影至水平面上求定其包含圓心位置與半徑之圓面參數。
圖 6 含附著物之直立圓桿(圖片來源:GOOGLE 街景服務@政大校門口)
(a)點群分層 (b)分層點雲投影至水平面上 圖 7 點群分層概念圖(Lou and Wang, 2008)
Lou and Wang(2008)研究中採用之點雲資料為地面雷射掃描資料,故其圓桿點 雲分層後投影至水平面仍保持圓桿圓外形之完整性(如圖 7(b)),然而車載光達點雲 受到掃描方式、遮蔽、附著物等影響,導致分層內之點雲投影至水平面之圓桿圓外 形較不完整且包含其他附著物等雜點,以本研究實驗區之兩隻含直立圓桿之燈桿為 例(見圖 8 與 9),其中圖 8 為附著物較少之單純燈桿,分析其不同厚度分層之分層 內點雲之俯視圖,如圖 8(a)~(c)所示。可發現當分層厚度增加時,如圖 8(a)為全部燈 桿點雲,將有非直立圓桿上多餘雜訊點加入,或如圖 8(b)直立圓桿因傾斜導致不易 於求定其圓面參數;反之,當分層厚度減少時,如圖 8(c),將可取到屬於直立圓桿 上之點雲與減少直立圓桿因傾斜所造成之影響,但若分層厚度太小亦可能導致點雲 過於稀疏不利於偵測及求定直立圓桿圓面參數。
(a) 全部點雲之俯視圖 (d) 單純燈桿點雲側視圖 (b) 粉紅色區塊點雲之俯視圖 (c) 青色區塊點雲之俯視圖 圖 8 含較少附著物之燈桿不同厚度分層點雲俯視圖 而圖 9 為附著物較多之直立圓桿,分析其不同分層厚度之分層內點雲之俯視圖, 如圖 9(a)~(c)所示。可發現當分層厚度增加時,如圖 9(a)與 9(b),與圖 8 分析結果相 同,將有非直立圓桿上多餘的雜點加入導致不易於偵測並求定直立圓桿圓面參數; 反之,當分層厚度減少時,如圖 9(c),將有更大機會取到屬於直立圓桿上之點雲求 定其圓面參數,但若分層厚度太小,與圖 8 分析結果相同,可能導致點雲過於稀疏 不利於偵測及求定直立圓桿圓面參數。 即使使用分層概念處理附著物問題,可發現分層內的點雲資料中仍有非直立圓 桿的點雲(見圖 9(c)),故本研究發展以 RANSAC 為基礎之演算法由分層內點雲資料 中求定直立圓桿圓面參數,解決點雲中仍有附著物點雲干擾之問題。本研究中以 RANSAC 概念求定直立圓桿圓面參數之作法是將每分層內點雲投影至水平面上,針 對投影後之點雲,隨機取三個點,計算圓心位置與半徑之圓面參數,利用 RANSAC 概念重複 61 組的取樣後,將其 61 組所得之半徑值排序,取半徑中位數與其前後各 10 組,共 21 組計算其半徑、圓心 X 與 Y 坐標之標準差,若有一分層內之點雲所求 定之半徑、圓心 X 與 Y 坐標三種標準差均於門檻值以內者,則將此點群視為包含 直立圓桿。
(a) 全部點雲之俯視圖 (d)複雜燈桿點雲側視圖 (b) 粉紅色區塊點雲之俯視圖 (c) 青色區塊點雲之俯視圖 圖 9 含較多附著物之燈桿不同厚度分層點雲俯視圖 引用分層概念以及以 RANSAC 為基礎之演算法由分層內點雲資料中求定直立 圓桿圓面參數之前,本研究先引入下列直立圓桿物空間物件知識,排除不含直立圓 桿之點群,使得後續以 RANSAC 為基礎之演算法偵測判斷點群是否包含直立圓桿 更有效率,所判斷出含直立圓桿之點群後可以直立圓桿圓面參數過濾點群中屬於直 立圓桿之最高與最低高程,進一步模塑直立圓桿高度, 以下介紹於本研究中採用 之直立圓桿物空間物件知識: 1. 點雲數量:包含直立圓桿的點群其點數量應大於某一定數量,否則有可能會因點 雲過於稀疏不利於偵測及求定直立圓桿圓面參數。此點數之門檻值與掃描距離與 密度有關,經推算路旁含直立圓桿之點數至少需 50 點。 2. 直立圓桿高度:直立圓桿之高度應於一定範圍內,此可透過勘察實驗區內含直立 圓桿之地物高度設定,本研究實驗區內含直立圓桿之地物包含交通號誌、燈桿與 公車站牌,包含這些地物之直立圓桿高度約界於 1.5m~10m 之間,因此直立圓桿 高度值需界於 1.5m~10m 之間,亦即點群中最高與最低的高程值之差必須界於 1.5m~10m 之間。 3. 直立圓桿半徑: 直立圓桿圓面半徑應落於一定範圍,此亦可透過勘查實驗區內直 立圓桿之粗細予以設定。以本研究實驗區為例,路口之交通號誌直立圓桿與燈桿 皆屬於較粗之直立圓桿,其半徑約為 10cm,而公車站牌之直立圓桿於本實驗區
中通常較細,其半徑約為 2cm,故採用 2cm~10cm 為此參數之設定。 除了上述直立圓桿物空間物件知識:包含點雲數量、直立圓桿高度以及半徑之 門檻值外,點群之分層之厚度牽涉到是否能從八分樹結構化與群集後之點群中偵測 到直立圓桿。如先前圖 6 所示,因直立圓桿上經常有附著物,如交通號誌、廣告招 牌等。為解決附著物之問題,點雲分層處理需考慮分層之高度參數(即分層厚度)設 定。以圖 6 為例,可發現直立圓桿上有許多附著物,而較少附著物之厚度約為 80cm, 但人群走動等其他人為因素可能導致周遭干擾增加,加上實驗區內之大部分直立圓 桿上無附著物之厚度約界於 30cm~80cm 之間,故後續分層處理時所使用的每層分 層厚度為 50cm。而只要有一分層內點雲可以 RANSAC 為基礎之演算法求定圓面參 數則判斷此八分樹結構化並經 CCL 群聚成之點群具直立圓桿。僅用一分層內點雲 以 RANSAC 為基礎演算法求定圓面參數即判斷點群中具直立圓桿的主因是實驗區 內之環境複雜,若如先前所述,點群分層處理時分層厚度設定為 50cm,能成功以 RANSAC 為基礎之演算法計算圓面參數之層數約為 1~2 層,故本研究只要有一分層 內點雲可以 RANSAC 為基礎之演算法求定圓面參數則判斷此點群具直立圓桿。綜 合前述探討,將所使用直立圓桿點群之物件知識相關門檻值整理如表 1。其中以 RANSAC 為基礎之演算法求定圓面參數需滿足 X,Y 坐標標準差應小於 10cm 是考量 直立圓桿中可能傾斜、且如燈桿大多是上部較細下部較粗。 表 1 直立圓桿點群物空間物件知識整理表 點雲數量門檻 應大於 50 個點 直立圓桿高度範圍 界於 1.5m~10m 點雲分層之厚度 50cm RANSAC 半徑中位數範圍 界於 2cm~10cm RANSAC 半徑標準差 應小於 2cm RANSAC X 坐標標準差 應小於 10cm RANSAC Y 坐標標準差 應小於 10cm 成功以 RANSAC 為基礎之演算法求定圓面參數之層數 1 層
三、研究成果
(一) 實驗區與實驗資料介紹 本實驗所採用之點雲資料為 RIEGL VMX-250 車載光達系統掃描所得之點雲資 料,並依據車行軌跡資料分段處理取得位於政大附近指南路某一路段(見圖 10)之點圖 10 車載光達點雲分段實驗區範圍圖示
圖 11 以 GPS 定位之車行軌跡分段後實驗區範圍光達點雲資料圖示
(二) 地面點濾除 藉由車載光達系統上 GPS 所紀錄之車行軌跡資料以及 GPS 天線的高度及物空 間路廊場景知識濾除含有道路面、人行道等地面點得到非地面點雲,再以離分段車 行軌跡某一距離範圍外之約制條件排除離路旁較遠之點雲,結果如圖 13 所示,可 見路面、人行道等地面點皆已濾除。此階段處理所需之 GPS 天線的高度可事先量測, 而離分段車行軌跡某一距離範圍值是由人工方式於點雲中量測所得,本研究中量得 GPS 天線高度約 2.3m,離分段車行軌跡距離範圍則依據路寬與人行道寬度設為 10m。 圖 13 濾除地面點之結果圖示 (三) 非路面點雲結構化及分群 將所得之非地面點以 10cm 網格大小將點雲以八分樹結構化分割,並以 26 相鄰 之 CCL 演算法群聚,其成果如下圖 14 所示,不同顏色代表不同點群。26 相鄰之 CCL 演算法群聚結果中,仍有部分含直立圓桿的地物因與廣告招牌、遮雨棚、陽台 等物體相鄰(如圖 15 紅色矩形框所示的路燈),導致經八分樹結構化分割及 CCL 演 算法群聚後仍無法將其有效分離出來。
圖 14 非路面點雲經八分樹結構化與 CCL 演算法群聚之成果 圖 15 紅色框選處含直立圓桿之路燈點雲未被獨立群聚分離 (四) 直立圓桿辨識與模塑 非地面點雲結構化及分群群聚點群後,將點群點數小於 50 點之點群濾除後, 共得到 704 個點群。經表 1 直立圓桿點群物空間物件知識相關門檻值設定之後以 RANSAC 為基礎的演算法判斷 38 個點群可能包含直立圓桿,其中有 15 個點群確實 包含直立圓桿,23 個點群不包含直立圓桿而包含其他地物,7 個點群應包含直立圓 桿但漏判。直立圓桿漏授率(Omission)為 31.8%,即正確判斷率 68.2%,然而誤授率 (Commission)為 60.5%,即錯誤判斷率約六成。漏判之直立圓桿分別為編號 6、7、9、
11、15、16、19 共七支,詳見圖 16。由圖 16 可見漏判之 7 支直立圓桿,其周圍皆 有相鄰之物體,如廣告招牌、遮雨棚、路樹等,因此導致八分樹分割與 CCL 演算 法群聚無法有效將其分離出來。 (a)編號 6 (b)編號 7 (c)編號 9 (d)編號 11 (e)編號 15 (f)編號 16 (g)編號 19 圖 16 未被正確判斷包含直立圓桿之點群 經本研究之方法判斷之非直立圓稈,共有 23 支,誤授率高達 60.5%。其中主要 可以分成三種類型,分別為完整樹木點雲、過度分割樹木點雲與行人點雲。其中, 可發現若樹木點雲中因樹幹為類似直立圓桿,易被本研究所發展之方法判斷包含直 立圓桿,如圖 17(a)所示。而樹木之點雲因過度分割分成兩群點群時(如圖 17(b)所示), 由於樹幹類似直立圓桿故亦會被本研究所發展之方法判斷包含直立圓桿(如圖 17(b) 下圖所示)。此外,行人之點雲因雙腳亦類似值立圓桿,因此亦被誤判為包含直立圓 桿。上述樹幹或行人雙腳被誤判為直立圓桿是因本研究所發展於分層點群中以 RANSAC 為基礎之演算法求定圓面參數方法辨識是否包含直立圓桿時,僅以一層能 成功以 RANSAC 為基礎之演算法求定圓面參數即辨識其包含直立圓桿,其條件過
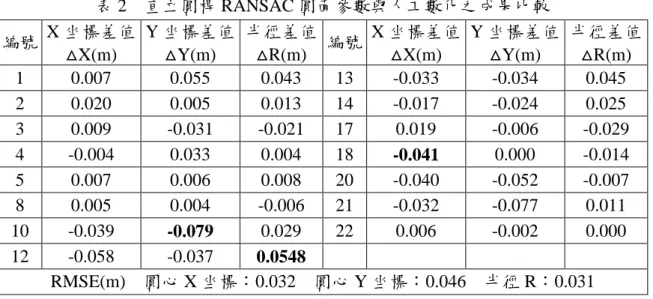
(a) (b) (c) 圖 17 錯誤判斷之點群(a)完整樹木點雲 (b)過度分割之樹木點雲 (c)行人點雲 而被正確判斷的 15 支直立圓桿中,現階段乃以人工量測方式量測直立圓桿高 度,並將以 RANSAC 為基礎的演算法所求定之圓面參數結合圓桿高度完成模塑, 如圖 17 所示。 圖 18 直立圓桿模塑之成果 接著將模塑出的各直立圓桿與人工量測之圓面參數比較,結果如下表所示。在 X 坐標方向誤差最大為編號 18 直立圓桿,其誤差約為 0.041m 左右。在 Y 坐標方向 誤差最大為編號 10 直立圓桿,其誤差為 0.079m 左右。在半徑差中,誤差最大為編 號 12 直立圓桿,其差值約為 0.05m 左右。整體而言,在 X 坐標方向 RMSE 為 0.032m, 在 Y 坐標方向 RMSE 為 0.046m,半徑 RMSE 為 0.031m。
表 2 直立圓桿 RANSAC 圓面參數與人工數化之成果比較 編號 X 坐標差值 △X(m) Y 坐標差值 △Y(m) 半徑差值 △R(m) 編號 X 坐標差值 △X(m) Y 坐標差值 △Y(m) 半徑差值 △R(m) 1 0.007 0.055 0.043 13 -0.033 -0.034 0.045 2 0.020 0.005 0.013 14 -0.017 -0.024 0.025 3 0.009 -0.031 -0.021 17 0.019 -0.006 -0.029 4 -0.004 0.033 0.004 18 -0.041 0.000 -0.014 5 0.007 0.006 0.008 20 -0.040 -0.052 -0.007 8 0.005 0.004 -0.006 21 -0.032 -0.077 0.011 10 -0.039 -0.079 0.029 22 0.006 -0.002 0.000 12 -0.058 -0.037 0.0548 RMSE(m) 圓心 X 坐標:0.032 圓心 Y 坐標:0.046 半徑 R:0.031
四、結論與建議
由於車載光達點雲資料量相當大且所掃描得到的相關路廊地物點雲眾多且複 雜,因此演算法中加入物空間中的場景與物件的相關知識並運用 RNASAC 的概念 協助處理。首先依據 GPS 紀錄之車行軌跡進行分段處理得到分段點雲資料,接著用 分段車行軌跡紀錄之平均高程與 GPS 天線高推算出之地面約略高程濾除含有路面、 人行道之地面點,緊接著,將其餘之非地面點雲以八分樹結構化及以 CCL 群聚演 算法群聚成點群,最後以 RANSAC 為基礎之演算法與物空間路廊場景物件知識判 斷點群是否包含直立圓桿,並針對直立圓桿予以模塑。而經本研究可發現經上述步 驟之處理後,實驗結果顯示直立圓桿模塑之漏授率(Omission)為 31.8%、誤授率 (Commission)為 60.5%;各直立圓桿萃取出之圓面參數與人工量測之結果比較在 X 坐標方向的 RMSE 為 0.032m,在 Y 坐標方向 RMSE 為 0.046m,而半徑的 RMSE 則為 0.031m。綜合上述本研究所發展之方法於本實驗區中約可以 70%正確判斷率判 斷包含直立圓桿點群並模塑,而無法正確判斷與模塑的主因是含直立圓桿的地物與 相鄰之物體(如廣告招牌、遮雨棚、路樹)太過於接近,導致八分樹體元結構化分割 與群聚時不易將這些含直立圓桿的地物確實分離。 而在本實驗中,使用本研究所提出以 RANSAC 為基礎判斷點群是否包含直立 圓桿之演算法亦亦萃取出部分路樹,因此可以由此延伸應可發展偵測與模塑路樹之 演算法。此外,本研究中於分層點群中僅以一層能成功以 RANSAC 為基礎之演算 法求定圓面參數即辨識其包含直立圓桿,其條件過鬆,未來應可以設定更嚴苛之條 件,如滿足 RANSAC 設定之直立圓桿物空間物件知識的層數增加等或將圓面參數 中的圓心參數中誤差門檻值設更嚴。為提升擬合之精度,未來亦可加入權迭代最小致謝
本研究為國科會計畫計畫編號:NSC 100-2221-E-004-010 經費贊助之部分研究成 果,特致謝忱,並感謝詮華國土測繪有限公司提供車載光達掃描資料。參考文獻
王淼,2011,《光達點雲區塊化》,國立成功大學測量及空間資訊學系博士論文。 李育華,2009,《車載移動式製圖系統之系統率定及其直接地理定位之效能分析》, 國立成功大學測量及空間資訊學系碩士論文。 迅聯光電有限公司,2010,產品世界--移動載具型雷射掃描儀,迅聯光電有限公司, http://www.linkfast.com.tw/product_rieg_c.htm,取用日期:2010 年 12 月 28 日。Brenner, C., 2009, Extraction of features from mobile laser scanning data for future driver assistance systems, in M. Sester et al. eds., Advances in GIScience, Lecture Notes in Geoinformation and Cartography, pp. 25-42.
Bolles, R., M., Fischler, 1981, A ransac-based approach to model fitting and its application to finding cylinders in range data, Proceedings of the 7th International
Joint Conference on Artificial Intelligence : Vancouver.
Chaperon, T., F., Goulette, 2001, Extracting cylinders in full 3D data using a random sampling method and the Gaussian image, Proceedings of the Vision Modeling and
Visualization Conference: Germany.
Chen, Y.-Z., H.-J., Zhao and R., Shibasaki, 2007, A mobile system combining laser scanners and cameras for urban spatial objects extraction, Proceedings of the Sixth
International Conference on Machine Learning and Cybernetics: Hong Kong.
Kukko, A., C.-O., Andrei, V.-M., Salminen, H., Kaartinen, Y., Chen, P.,Rönnholm, H., Hyyppä, J., Hyyppä, R.,Chen, H.,Haggrén, I.,Kosonen, , K.Čapek, 2007, Road environment mapping system of the Finnish Geodetic Institute – FGI Roamer,
International Archives of the Photogrammetry, Remote Sensing, XXXVI (3/W52),
p.241-247.
Lehtomäki, M., A., Jaakkola, Juha.,Hyyppä, A., Kukko, H.,Kaartinen, 2010, Detection of vertical pole-like objects in a road environment using vehicle-based laser scanning data, Remote Sensing, 2, pp. 641-664.
Lukács, G., R., Martin, D., Marshall, 1998, Faithful least-squares fitting of spheres, cylinders, cones and tori for reliable segmentation, Proceedings of the 5th European
Conference on Computer Vision, Freiburg: Germany.
Luo, D., Y., Wang, 2008, Rapid extracting pillars by slicing point clouds, International
Archives of the Photogrammetry, Remote Sensing, XXXVII(B3b), pp. 215-218.
Manandhar, D., R., Shibasaki, 2001, Feature extraction from range data, Proceedings of
Marshall, D., G., Lukacs and R., Martin, 2001, Robust segmentation of primitives from range data in the presence of geometric degeneracy, IEEE Transactions on Pattern
Analysis and Machine Intelligence, 23, pp. 304-314.
Mumtaz, S. A., 2007, Extracting physical and environmental information for Irish roads using airborne laser scanning (ALS), MPhil Research Project, Dublin Institute of Technology.
http://www.tnet.teagasc.ie/rerc/downloads/EORS/3rd%20session/salman%20ali.pdf.
Petrie, G., C.K., Toth, 2009, Terrestrial laser scanners: in topographic laser ranging and
scanning, principles and processing, Boca Raton: CRC Press.
Rabbani, T., F., van den Heuvel, 2005, Efficient hough transform for automatic detection of cylinders in point clouds,International Archives of the Photogrammetry, Remote Sensing, XXXVI (3/W19), pp. 60-65.
Fischler, M.A., R.B., Bolles, 1981, Random sample consensus: a paradigm for model fitting with applications to image analysis and automated cartography,
Communications of the ACM, 24(6), pp. 381-395.
Schnabel, R., R., Wahl and R., Klein, 2007, Efficient ransac for point-cloud shape detection, Computer Graphics Forum, 26, pp. 214-226.
Schwarz K.P., N., El-Sheimy 2004, Mobile mapping systems - state of the art and future trends,International Archives of the Photogrammetry, Remote Sensing, XXXV (B5),