Maneuvering Target Tracking
with Colored Noise
WEN·RONGWU DAH.CHUNG CHANG
National Chiao Thng University Thiwan
It is known thai colored noise may degrade the performance of a tracking algorithm. A common remedy is to model colored noise as an autoregressive (AR) process and apply the measurement difference method. One problem with the approach is that the AR parameters are usually unknOWIL In this work, we propose a new method to adaptively estimate the AR parameters. It is shown that this method is simple and practically feadble. We incorporate our method into the interacting multiple model (IMM) tracking algorithm and _how that the performance is almost as good as that. in the known parameters case.
Manuscript received June 10, 1994; revised May 10 and August 24, 1995.
IEEE Log No. T·AESJ32/4/08000.
Authors' address: Department of Communication Engineering, National Chiao Thng University, Hsinchu, Taiwan, R.O.c.
0018·9251/96/$5.00 © 1996 IEEE
I. INTRODUCTION
A white noise observation model is widely
used in tracking problem formulation. In practice,
the measurement noise may not be white. This
phenomenon is due to the scintillation of the target.
Typically, the bandwidth of measurement noise
is on the order of several hertz [3, 12]. When the
measurement frequency is much lower than the
noise bandwidth, the successive samples of the
noise are approximately uncorrelated, and it can be
seen as white. However, in many radar systems, the
measurement frequency is high enough so that the
correlation cannot be ignored without degrading the
tracking performance.
The conventional method that alleviates the effect
of colored noise is the state augmentation approach
[1]. But this may cause the covariance matrix to be
ill·conditioned. Bryson [2] proposed the measurement
difference approach to prevent the problem. Rogers
[3] modeled the colored noise as a lst·order AR
process and applied the measurement difference
approach to the a-f3 filter. Guu and Wei
[4] extended
Rogers' method in [3] to maneuvcring target tracking
problem using the interacting multiple model (IMM)
metho
d. Besides
descrete·
time approaches, some
researchers also investigated the continuous-time
Kalman tracker under the colored noise environment.
Rogers [6] derived closed· form solutions for the
tracker with exponentially correlated velocity (ECV)
and exponentially correlated acceleration (ECA).
Arcasoy
[7] used the spectral factorization method
to
develop cxpr
cs
sions
ofthe Kalman gains for the
ECV and ECA tracking problems. In aforementioned
approaches, they all assumed that the a
utor
eg
ressi
ve
(AR)
coefficients are known. However, this may
not be possible in the real applications. GUll and
Wei
[5] then further developed a method to estimate
the AR parameters. Unfortunately, this method is
computationally intensive and only applicable to the
Makovian acceleration model.
It cannot be used in
some advanced tracking algorithms such as IMM.
We propose a new method to estimate the AR
parameters. We first remove the state variables from
measurements by passing them into a moving average
(MA) filter and this results in an autoregressive
moving average (ARMA) signal. it is found that
the z-transform of the signal has two zeros on the
unit circle. In order to obtain the AR coefficient
from the ARMA signal, we further introduce an
AR filter to cancel the zeros. The AR parameters
are then calculated from the statistics of the output
signal. However, when the target is maneuvering, the
estimates will be biased. From theoretical analysis,
we derive a closed·form solution to remove the bias.
OUf method
canbe
implemented adaptively and issuitablc for on·line processing. Simulations show that
our method can estimate the parameters precisely. The
proposed algorithm and the measurement difference method are used in the IMM algorithm and significant improvement is obtained.
II. DECORRElATION PROCESS
In this section, we describe the decorrelation process in [3]. For simplicity, we assume that states of target motion are defined in the spherical coordinate sueh that the state equations can be decoupled into three independent channels. Then, the tracking filter can work independently on each channel [9]. The state equations in a particular channel can be described as follows
Xk+1 = ¢Xk
+ GWk
Yk =HXk +Vk
(1)
(2)
where
Xk
is state vector, ¢ is state transition matrix, Yk is the measurement, Wk andVk
are the state and themeasurement noise, respectively. If the measurement frequency is high, the correlation of
Vk
cannot be ignored. Rogers[3J
modeled the continuous colored noise as a first-order AR process, which can be described as(/(t) = -).,u(t
)
+fJ(t).
(3) Samplingu(t
)
with a periodT,
we obtain a difference equation which iswhere 0:
=
e->'T
and17k
is zero-mean whiteGaussian noise with variance
O'�.
To decorrelate the measurement noise, a new measurementYk,
called "artificial measurement," is generatedwhere _
6-Yk =6-Yk - O:6-Yk-l
= H(Xk
- O'Xk-l)
+
(JJk
- O:Vk-l)
= HXk +fik
H =H(1-
o:¢-l)
fik
=O'r1Gwk_l
+ fJk·
In practical applications, the first term of right-hand side in
(7)
is usually small and can be neglected. So, we haveT hus, fik can be treated as white. Now, the new measurement equation (5) and the original state equation (1) can be used in the Kalman filtering. III. ESTIMATION OF AR PARAMETERS
In the previous section, we sec that if the AR parameters (0: and
0',/)
are known, the colored noise(4)
(5)
(6)
(7)
can be decorrelated. However, it is difficult to know thc parameters in the real application. Here, we propose a method that can effectively estimate the parameters. For the ease of description, we assume that thc measurement is the position of the target. Let
X
k "" [Xb Vbakf
whereXb Vk,
andak
are position, velocity, and acceleration of the target, respectively, we then have the measurement equation(9) Since measurements contain state variable
Xk,
the direct estimation of AR parameters is difficult. It will be very helpful if we can remove state variable Xk. From the Newton's law, we have(10)
We now use the following operation to obtain a new . signal
lh
that does not involve XkUk
= Yk -
2Yk-l +
Yk-2
=
(Yk -
Yk-l) -
(Yk-l - Yk-2)
= (Uk - 2JJk_l + Vk_2) + (Xk - Xk-l)
- (Xk-l - Xk_2)= (Uk - 2Uk_1 + Uk-2) + !Cak-l + ak_2)T2.
(11) A close look reveals that the operation is essentially a MA filtering and it can completely null a linear function(ak = 0).
When the measurement frequency is high, the measurement (without noise) is approximately linear in a short period of time (in our case, twoT8).
T hus, this simple filtering operation enables us to extract the measurement noise with little distortion. To investigate the effect of the filtering, we go to the transform domain. Taking theZ
-transform of (11), we havewhere
U(Z)
= (1- 2z-1 + z-2)v(Z)
+m(z)
=
(1- [1)2u(z)
+ m(z)
(12) (13) Note thatJJk
is an AR process. From(4),
we find its transfer function is1
JJ(z) =
1--o:z-ll)(Z).
Thus, we can representu(z)
as(1-
Z-1)
2u(z) =
1-ar1 7/(Z)
+ m(z).
(14)
(15)
When the target is nonmaneuvering, the acceleration is zero and
m(z)
is zero. From (15), we knowUk
is an ARMA process. Since there are two zeros on the unit circle, it is difficult to use the general systemidentification methods to estimate the AR coefficients. To overcome this problem, we further introduce a filter to cancel the zeros. Consider the filter described by its transfer function as follows
1
F(z) -
- (1- prl)2
-:-:---�(16)
where
0
s:
p
s: 1. Passingu(z)
throughF(z),
we obtain the output (denoted asu(z»
(1- z-I)2
_u(z) = (1- prl)2 u(z)
(17)1 (1-
Z-Ip
m(z)
1-
o:rl
(1-pZ-l)21J(Z) + (1- pr1)2'
(18) Fornonmaneuvering cases, the second term of
the right-hand sidein
(18) is
zero. If we letp
=1,
zeros are completely canceled. From (18), we sec that Uk is just the colored noise vb i.e.,(19)
Denote the autocorrelation function of Uk as
reo).
The 0: can then be estimated by, r(l)
0: ""r(O)'
(20)
Here, we use an adaptive method to estimate the
autocorrelation function. By
the fading memory technique [151, we havei'k(O)
=f:Jh-l(O) + (1- f:J)u�
(21) (22) where 0 <(3
< 1 is the forgetting factor. If (3 islarge, the convergence of PO is slow and it cannot response to the change of 0: quickly. The advantage
of using large f3 is the small estimation variance. On the
contrary, small f3
will letPO
converge fast and response quickly. However, the estimation varianceis
large.
When the target is maneuvering,
m(z)
is not negligible. In this case, we cannot choosep
as one,otherwise the low frequency components of
m(z)
will be greatly amplified. It is easy to see this from the Fourier transform ofF(z)
IF(eiW)1 = \1-:e-
jwr
1(1 + p2) - 2pcosw .
(
23
)
The magnitude in (23) will become huge if
p = 1
andw is small (infinite for
w = 0).
This will breakdownthe whole algorithm. Therefore,
p
cannot be one. From experience, we find that ifp i
s0.9
or less, the amplification effect is small compared with the first termof
(18). With suitable choice ofp,
we can thenFig. 1. Algorithm of estimating AR coefficient of colored noise.
ig
nor
em(z). T
hu
s,
1
(1_Z-1)2
u(z)::::! 1- o:rl (1- pz-l)21J(Z).
(24)
However, the nonunity
p
raises another problem. From(24),
it is clear that Uk isno
longerequal
toVk and
r(l)
0:
t=
reO)"
(25)
The estimate
of
(20)
is then biased. To correct the bias, we explore the relation of 0: andr(l)/r(O).
Equation(24)
can be rewritten as[1- (2p + O:)Z-1 +
(2ap
+p2)z-2 - o:p2z-3Ju(z)
(26)
Thus,
u(z)
is an ARMA process. Using the Yule-Walker equations [15], we can sol
ve for its coefficients in termsof
its autocorrelation function. Letb r(1)
0: =
reO)
(27)
6
=(p
+
Ii
(28)6 =
(_2p2 -lOp - 4) + (-6p
-2)o:b
(29)
(30)
�o = (
2p
2 +
2p- 4) + (-2p - 6)o:h.
(31)
Then, 0: and(J�
can
befound as follows. We leave
derivation details in Appendix A
and
-(6
+6)- )(6 + 6)2_46(6 + 6 +
�1)
Q =26
[-2/0:2 + (1- p4)a +
2p]r(0)
(32)
+[(p2 + p4)0:2
+(2p3
_
2p)0: _(p2
+l)]r(l)
(1 + p2)0:
+(2p
-4)
(33)
Substituting o:b with its estimate
<'ii,
we can obtain<'ik
and
a-�,k'
The block diagram of our proposed algorithm is shown in Fig. 1.In this paragraph, we estimate the computational requirement of our algorithm. Since the computational complexity of a multiplication/division is much higher than that of an addition/subtraction, we then ignore the operations of addition and subtraction in our complexity estimate. From Fig. 1, we know that
there are three stages in our algorithm. First, we use (17) to extract colored noise. Second, we use (21), (22), and (27) to calculate o:b. Finally, we use
(28)-(33) to estimate 0: and
O"�.
Totally, we need26 multiplications, two divisions, and one square root operation for one cycle. It is shown that
[13]
a Kalman filter with scalar observations requires 4n
3 +2.5n2
+3.5n
+3
multiplications wheren
is the state dimension. The mixing operations in an IMM algorithm require2:::1 (2nr
+ 2n
i + 4) multiplicationsand
m
exponential operations wherem
is the number of models and n; is the dimension of the ith modeLFor example, if we use two models in the IMM algorithm; one is 2-dimensional and the other one is 3-dimensional, a complete IMM algorithm will require 240 multiplications and two exponential operations. The computational complcxitics of the square root, division, and exponential operations are much higher than multiplications. It is difficult to have a precise evaluation. Roughly, we can say that the computational complexity of our algorithm is approximately one-tenth of the IMM algorithm.
Though Guu and Wei
[5]
also used themeasurement difference method to decorrelate colored noise, their AR identification algorithm is different from ours. They assumed that the acceleration of the target, ak> is a first-order Markov process (AR process), i.e.,
where
(k
is a white Gaussian process,0";
== E{fn is unknown, and T is assumed to be known. Theydefine the innovation of the artificial measurement
(
3
4)Yk
as'ljJk
==Yk
�h; h
is the prediction ofYk'
Using the correlation functions of1/Jk, f!j
==E{1J;k1);k-j},
j
== 0,1, . .. , Guu and Wei derived the following relationshipj
== 0,1, ...(35)
wherefj
is a scalar andgjO
is a nonlinear function of 0:. To solve(35),
a
nonlinear algorithm was used tominimize a least-squares criterion
where
ih
is an estimate of (! j based onthe
innovation sequence. T he problem of this approach is that many matrix andvector operations
are requiredto obtain fj
andgj{-);
it iscomputationally
intensive. In addition, the nonlinear minimization algorithm may converge to a local minimum.IV. SIMULATION RESULTS
In this section, we carry out some simulations to demonstrate the effect of the proposed algorithm. For simplicity, we only consider a one-dimensional
range tracker herein. The IMM is applied as the tracking algorithm, which is implemented by using a second-o�der model for the nonmaneuvering mode and two third�order models for the maneuvering mode, one is with process noise and the other is without process noise. They are described in the following equations.
1)
Nonmaneuvering mode:
2)
Maneuvering mode:
[1, [�I In [1+
(38)
where
Wk
andwk'
are white noise�. The measurement equation is(39)
The Markovian transition probability matrix in IMM is
chosen as
[
0.99 0.01 0.00
]
[Pij]
== 0.33 0.34 0.33 . 0.00 0.01 0.99In this simulation, the sampling period is taken as 0.05 s. The total tracking interval is 60 s. In
(40)
other words, there are 1200 measurement samples. The maneuvering occurs on 20th s to 40th s with constant acceleration 40 m/s2 (about 4g). The state noise variances are
E[WkWk]
== 10-3 (m/s2)2 for the nonmaneuvering mode andE[wk'wk']
== a (m/s2)2, 8002 (m/s2)2 for the maneuvering mode. We assume that the standard deviation of measurement noise isO"y == 100 m. Two AS are used in the simulations. One is
4
s-l and the other is 10 S-l. The corresponding 0: values are 0.8187 and 0.6067, respectively. Thesimulation setup is the same as that in r4]. 100 Monte Carlo runs are carried out and the average results are shown under the root mean square error (RMSE) criterion
RMSE(k) =
! texk
-
ri)2
;=1k
=
1,2, ... ,1200;m ==
100 (41) wherexie
denotes state estimate of the ith Monte Carlo run for the kth sample.We first cxamine the behaviors of the roots in
(32).
Fig. 2 shows the plot of 0: versus o:b for differentp values. Note that not all o:b is legitimate. The
value inside the square root in (32) must be greater than or equal to zero. From Fig. 2, we sec that if p approximates to one, the corresponding curve will be 1314 IEEE TRANSACTIONS ON AEROSPACE AND ELEC1RONIC SYSTEMS VOL.
32,
NO.4 OCTOBER1996
0.8 0.6 0.4 0.2 -0.2 -0.4 (1), P = 0 (2), p -0.1 m 'P= 0.2 (,I), p = 0,3 (;)'p=0.4 (6) 'P = 0.5 (7): p = 0,6 (8) :p=O.1 (9) 'P = 0.8 (10),p=0.9 -0.4 -0.2 a 0.2 0.4 0.6 0.6
biased correlation coeff.
Fig, 2. Behavior of correct root for different
p,
completely linear with unit slope. This implies that the estimator in (20) yields unbiased estimates. Ifp
::j: 1, the estimate is biased. Also note that for smallerp
the slope of the curve is larger. This indicates that theO,5�---0.45 o 200 � P =0.97 ....-.... P =0.90 ---p =0.60 400
resolution for Cib is p oorer. This will adversely affect the Ci estimate. All the curves in Fig. 2 are above the line 0: = o:b and pass through (-1, -1). In addition, their slopes are increasing. Thus, we can say that the larger the Ci is, the more bias Ci will have. For 0: = -1,
there is almost no bias.
To further study the effect of
p,
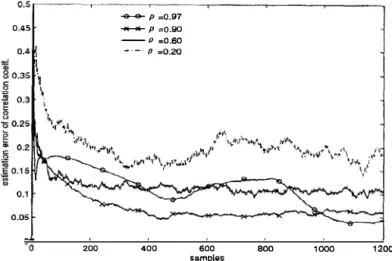
we plot the estimates for the whole tracking interval. Here, we assume that Ci = 0.8187 for whole interval. Figs. 3and 4 show the results of
O:k
and (J ",k estimates fordifferent
p
values. The (3 is taken as 0.99. Generally, we find that largerp
will have better results. However,too large
p
will amplify themk
term in (18) when target is maneuvering. This results in poorer results. Forp
= 0.9, we see that the estimates are almost notaffected by maneuvering. In the case, the estimate error of Ci and (J" is around 0.075 and 4, which is
quite small
«(J'I
= 57.4). We also simulated another case that 0: = 0.6067. The results are similar to thoseobtained previously and is therefore not shown. One
600
samples BOO 1000 1200
Fig. 3. Relation of
a
estimation error andp (a
=0.8187, (3
=0.99).
30 mrr---r---�---._---,_---,_---� 25 5 o 200 -&-e- P =0.97 ... P =0,90 -- P=0.60 '-'-' p=O.20 400 600 samples BOO 1000
Fig. 4. Relation of 0',., estimation error and
p (<Til
=100, (3
=0,99).
WU &
CHANG: MANEUVERING TARGET TRACKING WITH COLORED NOISE1200
-0.8
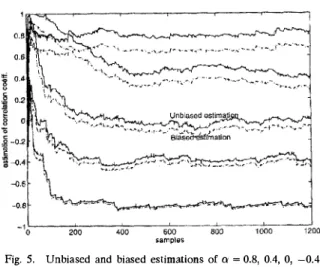
In Fig.
5,
we show the simulation result (single realization) for the estimation of O! with and withoutbias. Five O! values are used. They are
0.8, 0.4, 0, -0.4,
and
-0.8.
We set p =0.9
and f5 =0.995.
It is clear that for smaller 0:, the bias is smaller. This agrees with ourinduction from Fig.
2.
As aforementioned,
D:k
is adaptively estimated and the convergence rate depends on the f5 value. Smaller f3 has better tracking property but the estimation error islarger.
To investigate the tracking property,-1
0�----720�0----�40�O---6=O�O----�8=O�O----�100�O----�12'O
O sampleswe now let O!k ""
0.8187
for nonmaneuvering periodand
O:k
""0.6067
for maneuvering period. Note thatO!k
experiences abrupt changes during the tracking period. Figs. 6 and 7 show the performance of estimates of
O:k
and (J",k for different f3 values. Here, we setp = 0.9.
In this experiment, we initiate the tracker
40
s before the formal tracking period. The purpose is to investigate the steady state behavior of our algorithm. From the figures, we verify the statement made Fig. 5. Unbiased and biased estimations of Q = 0.8, 0.4, 0, -0.4,and -0.8
(p
= 0.9).thing different is that for p =
0.97,
the amplification ofmk
is more serious than that in 0: =0.8187.
However,for p =
0.9,
the estimate is almost not affected.1316 O.5'---�----�----�----r-___ _ --, ___ --, 0.45 0.4 � 80.35 � o
i
0.3 8 '00.25g
� 0.2 o � .1'00.15 i � G�0.995 -- fJ�O.990 --f3 �O.985 - - ,3 =0.980 °O�---�2�OO�---4�O�O---6=O�O---�80�0�--� 100�O- samplesFig. 6. Relation of 0' estimation error and
p (p
= 0.9).1200 30,---�----.---_r---�---r_---� --e--e-- B =0.995 --f3�.990 25 -- a �O.985 - - ,9 -0.980
°O;----�2�OO�----4�0�O�--�60�0�---�8�O�O---,�O�070---�,200
samples Fig. 7. Relation of Ir� estimation error andp (p
= 0.9).o
-e-iT-Undecorrelated (cotored noise)
- - Exactly decorrelated (known parameters)
--Our approac;h (unknown parameters)
100 200 300 400 500 600 700 BOO 900 1000 1100
samples
Fig. 8. Performance of position tracking in colored noise
(p
=0.9, f3
=0.99).
2i .§. g '" go :g � ... . .,
�
120-G--G-Und�c::ol'mlatAd (Colored noise)
- - Exactly decorrelated (known parametera.)
100 --Our approach {unknown para.meters) BO 60 40 20 oL---100 �--200 �--300 �--400 �--500 �--�--�GOO 7 --�--�--���--� 00 900 000 1000 1100 samples
Fig.
9.
Performance of velocity tracking in colored noise (p =0.9, (l
=0.99).
before. For f3 ==0.99, we
find that it provides agood compromise between conv
e
rgence rate and estimation error.From
theabove result,
we know that p shou
ld be used as large as possible. The mai
nfactor limit
we show the tracking
performances for cases without deeorrelati
on, wi
the
xact decorrelat
ion(
given the AR
parameters), and with the pro
posed decorrelation scheme. Weassume ak
=0.8187
for target nonmaneuvcring period andak
=0.6067
for maneuvering period. The rest of the paramete
rs
are chosen as p =
0.9
andf3
=0.99.
This choice pismk. Fr
om (13), we fin
d mki
s determined bytar
g
et
accel
eration ak and sampling period T. If T is smal
ler,l
arg
e p can beused. Thus, we
can conclude that the higher the measurement frequency is, the better ou
r alg
orithm will
work. f3 determines the tracking property and should be chosen acc
ording to how
fast a will change. Forslow
changing a,f3
can belarge. It see
m
s that negative ais
eas
ier towork
with(
sm
al
l bias). This can be explained by thc fact thatcan make the estimation of a and (J' n insensitive to
maneuvering and abrupt changes of
parameters. From
these figures, we can dearly see that the performance of the decorrelated scheme is considerably better than that of
u
ndecorrelate
d one, speciall
yin
the velocity the positionm
easurem
ent is a low-
pass signal whilethe colored noise is a high-pass signal (for
n
egative a). Thus, it is easier to filte
ro ut the
noise.Finally, our approach is applied
to the m
aneu
vering target tracking with colored noise. In Figs. &-10,
and
acceleration estimates. The
performance
of the proposed al
gorithm
is almost asg
oodas that in
the
known paramcters casco Thc structure of the proposed algori
t
hm
is sim
ple and practically feasible. Also,it
can adaptively track the variation of the AR param
eters.This makes our algorithm is suitable for real-time applications.
-e-e--UndecorreJated (colored noise)
- - Exactly dscorrglated (known parameters)
50 -- Our approach (unknown parameters)
100 200 300 400 500 600 700 800 900 1000 1100
samples
Fig.
10.
Performance of acceleration tracking in colored noise (p =0.9, f3
=0.99).
V. CONCLUSIONWe have proposed a new algorithm to identify the
parameters
of colorednoise, which can be applied
to maneuvering target tracking. Our algorithm is
different from that of Guu and Wei [5]. We do not
need the assumption of Markovian acceleration for
the maneuvering target. Thus, the IMM algorithm
can be used to achieve better tracking performance.
From simulations, we
find that our algorithm identifies
the parameters properly such that the tracking
performance is
almostas good as that in the known
parameters case. The
simple structureof the algorithm
makes it easy
tobe implemented.
In(2), we assume
that the only noise component is colored noise
1Jkwhich is modeled
as a first-orderAR
process.If other
kind of noise such as white noise also exists, the mixed
noise will not
bean AR process any more. It can be
shown that an AR
processplus a white
processis
an ARMA process [14].
In this case,our algorithm
becomes a suboptimal
approach.APPENDIX A
The Yule-
Walkcr equationsof (26) are
reO) - alr(l) - a2r(2)
- a3r(3)
=(ai
- 4al
+a2
+6)0';
(42)
-
a
1r(0)
+(1- a2)r(1)
- a3r(2)
=(a1
-
4)()'�
(43)
-a,r(O)
-
(a,
+a3)r(1)
+r(2)
=0';
-a3r(0) -
a2r(1)
- alr(2)
+r(3)
=0
where
al
=2p + 0:
a2
=-(2po: + p2)
a3
==p20:.
(44)
(45)
(46)
(47)
(48)
Substituting r(2) and r(3) in (42) and (43)
byusing
(44)
and(45), we have
(a� + a1a2a3 + a� - l)r(O)
+ (al +
alal
+2alG3
+ara3
+ala
�
)r(l)
+
(ai
- 4al + 2a2 + ala3
+6)O'�
=0
(49)
and
(al + Q2a3)r(O) + (a2 + a1a3 + a� -1)'(1)
+
(al
+a3 - 4)O'�
=O.
From(46)-(50), we have
(50)
[_2p30:
3 +(4p2 - 4l)02 + (4p3 - 2p5)0:
+l-l]r(O)
+[(p2
+p4)0:3
+(2p5 _ 2p)0:2
and
+ (2p4 -5p2 + 1)0
+(2p - 2p3)],(1)
+
[(1
+ p
2)
Q2
+(2p3 - 4)0:
+ (2pl_ 8p + 6)]O'�
=0
[_2p30:2
+(1-p4)0: + 2p]r(0)
(51)
+ [(p2
+l)a2 + (2p3
_2p)a
_(p2
+1)],(1)
+[(1 + l)a + (2p - 4)JO'�
=O.
(52)
From (52), we yield
[_2p3o;2
+(1- p4)0: + 2p]r(0)
0'2 =_
+[(p2 + l)a2 + (2p3 - 2p)0: - (p2
+1)]r(1)
1/(1
+
p2)0:
+(2p - 4)
Replacing O'� in (51) by (53) and simplifying the
equation, we have
(53)
(54)
where
6
=(p + 1) 3
(55)
6
=
(_2p2 - 10p
-4)
+ (-6p
-2)oJ}
(56)
el
=(_p3 - 3p2 + 5p + 7) + (8p + 8)ab
(57)
eo
=
(2p2 + 2p
-4)
+ (-2p - 6)ab•
(58)
Note that 6
+ 6 + el + eo
= O.
It implies that
a
= 1is
one root of (54). But we know
a
f
1and this root can
be discarded. So, (54) is simplified as
60:2
+
(6
+ 6) 0: +
(6
+
6
+
6)
= O.
(59)
There are two roots in
(59):"
They are
0: =
{
-
(6
+ �2) + vr7( �-;-3-+--:e-:C2)"'2 ----:-4e-=-3 (-:-::e-3 +---=-e2---'+-e:-:-t)
ze3
-(6
+6)-
)(6
+6) 2
-46(6
+
6 +6)
2
6
(60)
From numerical evaluation, we find out that the first
root in (60) is greater than one for
0'::;
p
<1.
Thus the
second root is the correct solution.
REFERENCES
[1] Kalman, R. E. (1963)
New method in Wiener filtering theory.
In J. L. Bogdanoff and F. Kozin (Eds.), Proceedings ofrhe First Symposium on Engineering Applications of Random Function Theory and Probability.
New York: Wiley, 1%3, 270--388. [21 Bryson, A. E., and Henrikson, L. J. (1968)
Estimation using sampled data containing sequentially correlated noise.
Journal of Spacecraft,S, 6 (1%8), 662-665. [3] Rogers, S. R. (1987)
Alpha-beta filter with correlated measurement noise. IEEE Transactions on Aerospace and Electronic Systems, AES-23, 4 (1987), 592-594.
[4] Guu, J. A., and Wei, C. H. (1991)
Maneuvering target tracking using IMM method at high measurement frequency.
IEEE Transactions on Aerospace and Electronic Systems, 27, 3 (1991), 514-519.
[5] Guu,1. A., and Wei, C. H. (1991)
'fracking technique for maneuvering target with correlated measurement noise and unknown parameters.
lEE Proceedings, PI. F, 138, 3 (June 1991), 278-288. [6] Rogers, S. R. (1990)
Continuous-time ECV and ECA track filters with colored measurement noise.
IEEE Transactions on Aerospace and Electronic Systems, 26 (1990), 663-666.
[7] Arcasoy, C. C., and Koc, B. (1994)
Analytical solution for continuous-time Kalman tracking filters with colored measurement noise in frequency domain.
IEEE Transactions on Aerospace and Electronic Systems, 30 (1994), 1059-1063.
[8] Singer, R. A. (1970)
Estimating optimal tracking filter performance for manned maneuvering target tracking.
IEEE Transactions on Aerospace and Electronic Systems, AES-6, 4 (1970), 473-483.
[9] Gholson, N. H., and Moose, R. L. (1977)
Maneuvering target tracking using adaptive state estimation.
IEEE Transactions on Aerospace and Electronic Systems, AES-15 (May 1977),448-456.
[10] Blom, H. A. P., and Bar-Shalom, Y. (1988)
The interacting mUltiple model algorithm for systems with Makovian switching coefficients.
IEEE Transactions on Automatic Control, 33 (Aug. 1988), 780--783.
[11] Bar-Shalom, Y., Chang, K. C, and Blom, H. A. P. (1989) 'fracking a maneuvering target using input estimation versus the interacting multiple model algorithm.
IEEE Iransactions on Aerospace and Electronic Systems, 25 (Mar. 1989), 296-300.
[12] Skolnik, M. l. (1990) Radar Handbook.
New York: McGraw-lIill, 1990. [13] Grewal, M. S., and Andrews, A. P. (1993)
Kalman Fillering: Theory and Practice. New York: Prentice-Hall, 1993. [14] Pagano, M. (1974)
Estimation of models of autoregressive signal plus white noise.
Annals of Mathematical Statistics (1974), 99-108. [15] Haykin, S. (1991)
Adaptive Filler Theory.
Englewood Cliffs, NJ: Prentice-Hall, 1991.
1320
Wen-Rong Wu was born in Taiwan, RO.C., in
1958.
He received his B.S. degree in mechanical engineering from Tatung Institute of Technology, Taiwan, in1980,
M.S. degrees in mechanical and electrical engineering, and Ph.D. degree in electrical engineering from State University of New York at Buffalo in1985, 1986,
and1989,
respectively.
Since August
1988,
he has been a faculty member in the Department of Communication Engineering in National Chiao Tung University, Thiwan. His research interests include estimation theory, digital signal processing, and image processing.Dah-Chung Chang was horn in Chia-Yi, Taiwan on Junc 13,
1969.
Hc received the B.S. degree in electronic engineering from the Fu-Jen Catholic University, Taipei, Thiwan, in1991
and the M.S. degree in electrical engineering from the National Chiao Tung University(
NCTU), Hsinehu, Taiwan, in1993.
He is currently with the image laboratory in the Department of
Communication Engineering at NCTU and working toward the Ph.D. degree. His study interests include the area of detection and estimation theory, digital communications, signal processing, and radar tracking.