國
立
交
通
大
學
電機學院與資訊學院
電機與控制學程
碩 士 論 文
壓電平台遲滯模型
Piezo stage hysteresis modeling
研 究 生:黃煥祺
指導教授:林錫寬 教授
壓電平台遲滯模型
Piezo stage hysteresis modeling
研 究 生:黃煥祺 Student:Huan-Chi Huang 指導教授:林錫寬 Advisor:Shir-Kuan Lin 國 立 交 通 大 學
電機學院與資訊學院專班 電機與控制學程
碩 士 論 文 A ThesisSubmitted to Degree Program of Electrical Engineering and Computer Science
College of Electrical and Computer Engineering National Chiao Tung University
in Partial Fulfillment of the Requirements for the Degree of
Master of Science
in
Electrical and Control Engineering August 2006
Hsinchu, Taiwan, Republic of China
壓電平台遲滯模型
研究生:黃煥祺 指導教授:林錫寬 國立交通大學 電機學院與資訊學院 電機與控制學程﹙研究所﹚碩士班 摘 要本論文之主要目的在於修改Maxwell slip model 成為一套改良型
Maxwell 彈滑模型,然後利用此一改良型 Maxwell 彈滑模型模擬壓電平台固 有的響應遲滯現象(Hysteresis)。本論文並將改良型 Maxwell 彈滑元件參數求 解問題,簡化成為一個參數鑑別的最佳化問題。利用遞迴最小平方和誤差 法(Recursive least-squares algorithm),即時求取彈滑模型之參數,使得彈 滑元件所描繪的線段與壓電平台響應曲線之間的平方誤差和最小,作為將 來設計前饋補償控制器的依據。
實驗結果證明,利用遞迴最小平方和誤差法可以即時且有效地求取彈
滑模型之參數,使得由改良型 Maxwell 彈滑元件所組合的線段趨近於壓電
Piezo stage hysteresis modeling
Student:Huan-Chi Huang Advisor:Dr.Shir-Kuan Lin
Degree Program of Electrical Engineering and Computer Science
National Chiao Tung University
ABSTRACT
This paper presents an improved Maxwell Slip Model, and also presents a procedure for real time on-line identification of hysteresis functions, which are encountered in Piezoelectric actuators.
This paper shows that the on-line identification of hysteresis functions boils down to a well understood recursive least squares estimation problem if the hysteresis function is modeled as a weighted superposition of extended linear stop operators with fixed parameters.
Experiment results show that this technique has been successfully applied to model the hysteresis behaviour of a piezoelectric actuator.
誌 謝 感謝指導老師林錫寬教授,老師認真與嚴謹的治學態度讓我感受到紥實 的學術理論是研究工作的基礎。 感謝所有的授課老師,帶領我ㄧ窺知識殿堂之美,讓我了解學術存在的 重要,證實了我重回校園的價值。 感謝全體口試評審委員,各位詳細地指出論文的錯誤,並且提出建議修 改方向,給了學生寶貴的一課。由於各位的指引,學生發現了原本思緒不 足之處以及將來應該努力的方向。 感謝各位長官、前輩與學長,沒有各位的領導、協助,我不會勇敢的參 加入學考試,不會鎖定碩士論文題目;沒有各位的長期支持與容忍,我不 可能順利完成學業。 最後,感謝我的家人ㄧ路默默地支持我,讓我無後顧之憂,在此致上最 真摰的感謝。
目 錄 第一章 緒 論 1 -1.1 前言...-1 -1.2 研究動機與目的...-1 -1.3 本文貢獻...-2 -1.4 本文架構...-2 -第二章 壓電材料、壓電致動器與壓電平台簡介 4 -2.1 PZT 壓電材料、壓電效應與遲滯效應...-4 -2.2 壓電致動器的基本特性...-6 -2.3 壓電平台簡介...-6 -2.4 實驗過程與數據...-9 -第三章 文獻回顧 12 -3.1PREISACH模型...-12 -3.2 電荷控制...-13 -3.3 小腦模型類神經網路...-14
-3.4MAXWELL SLIP MODEL...-16
-第四章 彈滑模型的改良與參數鑑別 19 -4.1 改良型MAXWELL彈滑模型...-19 -4.2 決定彈滑元件的參數...-21 -4.3 彈滑元件數量的決策機制...-22 -4.4 模型參數鑑別流程 ...-23 -4.5 模型參數鑑別結果 ...-26 -第五章 結論與未來發展方向 28 -5.1 結論...-28 -5.2 未來發展方向...-28 -參考文獻 29 -附錄 A 31 -A.1THE LEAST-SQUARES OPTIMIZATION PROBLEM...-31
-第一章 緒 論
1.1 前言
由於人類對微小化元件的殷切需求,製程與檢測技術已漸由微米(10-6m) 進入了奈米(10-9m)範圍的時代。在面臨二十一世紀高科技發展的競爭中,奈 米技術已經成為國家高科技發展政策的一環。奈米科技涵蓋之領域非常廣 泛,包括機械微加工、材料、光學、微電子、量測、生化醫藥及原子物理 等,而奈米級形貌量測設備是奈米科技的基礎工具。其中,原子力顯微鏡 (Atomic Force Microscope)與白光干涉儀(Scanning White-LightInterferometric Microscope)是最知名的奈米級形貌量測設備。這兩種形貌 量測設備都需要對於探針或顯微物鏡進行奈米級位移操縱。
1.2 研究動機與目的
根據S. Vorndran[1]的分析,當傳統的微米級定位系統想要升級成為奈米 級定位系統,首先出現的問題為摩擦力、間隙、剛性等干擾問題。在高精 度下,微米尺度中被忽略的庫倫力變成系統動態模型需要考慮的重要因 素。這使得微米級定位系統常見的伺服馬達、滾珠、滾柱、滑軌、穿透式 光學尺等元件被壓電致動器(Piezo actuator)、撓性鉸(Flexures)、電容感 測器、反射式光學尺或雷射干涉儀取代。 壓電致動器具有體積小、重量輕、消耗功率低、響應快、位移解析度高 等優點,但是以電壓信號控制壓電致動器進行高速精密定位時,壓電致動 器的輸出位置與輸入電壓的關係受限於本身固有的遲滯現象,使得輸入和 輸出呈非線性關係。其本身所固有的遲滯現象(Hysteresis)會降低動態響 應特性,限制致動器的定位精度。 為了達到更快速的動態響應及較高的定位精度,在設計控制器時必須對 壓電材料之遲滯效應作補償,因此必須先建立一模型以描述遲滯現象,接 著選擇適當的模型參數,嘗試在無感測器開迴路控制架構下,消除壓電致 動器的非線性效應達到接近奈米等級的定位精度。Maxwell slip model 具有參數少、結構簡單的優點,但是存在著彈滑元件 參數耦合、只能描述對稱遲滯曲線等問題。
聯結構,推導出新的數學表示式,然後利用遞迴最小平方和誤差法
(Recursive least-squares algorithm)發展出一套即時自動參數鑑別法則,作 為將來前饋控制器設計基礎。
1.3 本文貢獻
本文以Maxwell slip model 為基礎,修改模型結構成為一套改良型
Maxwell 遲滯模型以建構出壓電平台的遲滯行為,並利用遞迴最小平方和誤 差法(Recursive least-squares algorithm)針對此模型發展一套即時參數鑑別
法則。本研究增加一個閥值參數Threshold供操作者使用,當壓電平台的遲滯
響應與改良型Maxwell 遲滯模型之估測值的絕對誤差大於閥值參數
Threshold時,將命令改良型 Maxwell 彈滑模型增加一組新的彈滑元件,加入
遞迴計算。本文克服了Maxwell slip model 遲滯曲線對稱的限制,並且依據
使用者對於模型誤差的期望值有系統的鑑別出合適的彈滑元件與各組參 數。從解決參數耦合、參數計算、元件數量、以及描述曲線的角度,分析 Maxwell slip model 與改良型 Maxwell 遲滯模型的差異,比較結果如表 1.1。
實驗證明,此一改良型Maxwell 遲滯模型經過遞迴最小平方和誤差法之
即時參數鑑別,具有結構簡單、參數少、適應性強等優點。
表1.1Maxwell slip model 與改良型 Maxwell 遲滯模型比較
Maxwell slip model 缺點 參數耦合 批次計算參 數 利用嘗試錯 誤決定元件 數量 只能描述對 稱曲線 改良型Maxwell 彈滑模型優點 參數獨立 即時計算參 數 依據條件自 動演算元件 數量 可以描述非 對稱曲線 解決方法 修改模型結 構 RLS 運用閥值判 斷 區分上升/下 降元件組
1.4 本文架構
本文共分成五章,第二章將介紹壓電材料的原理與遲滯效應的原因、壓 電致動器基本特性以及壓電平台構造。第三章文獻回顧,介紹目前壓電致 動器或壓電平台特性曲線判斷方法,以及壓電致動器常見的控制方法。第四章將以Maxwell slip model 為基礎,發展一套改良型 Maxwell 遲滯模型以 描述壓電平台非線性遲滯效應,同時利用遞迴最小平方和誤差法(Recursive least-squares algorithm)發展出一套鑑別模型未定參數的流程。第五章為結 論與未來發展方向。
第二章 壓電材料、壓電致動器與壓電平台簡介
壓電材料是目前精密定位系統廣泛使用的致動器材料,其原理是在壓電 材料上施予電場使其產生應變,主要優點在於出力大且精度高,但它也有 位移量小和響應遲滯的先天缺陷。因此,本章將介紹壓電材料的原理、壓 電致動器的基本特性以及壓電平台構造,讓吾人對於壓電元件有深入的了 解。2.1 PZT 壓電材料、壓電效應與遲滯效應
”piezo”一字源於希臘文,表示壓力的意思。1880 年居里兄弟(Jacques and Pierre Curie) 實驗發現,石英晶體受到壓力的時候,兩端會出現與應力大小 成比例的電動勢,並將此現象命名為壓電效應(piezo effect)。之後,居里 兄弟又發現了當石英晶體處於大小不同的電場,石英晶體會產生不同的形 變,並將此現象命名為逆壓電效應(inverse piezo effect)。逆壓電效應首先 於第一次世界大戰應用於太陽能系統,1940 年科學家發現鈦酸鋇(barium titanate)在電場之下具有較佳之壓電特性,壓電材料之應用從此進入突破性 發展。
圖2.1 顯示鉛鋯鈦(plumbum zirconate titanate,PZT)晶體極化前後的
晶格變化。(a)極化前 PZT 晶格呈現立方對稱;(b)當溫度低於居禮溫度(Curie
temperature),晶格因自發極化而顯現非對稱變形[2]。
自然界的材料,例如石英(quartz)、電氣石(tourmaline)、羅雪鹽(Rochelle
salt)等具有較小的壓電效應,複晶鐵電陶瓷材料(polycrystalline ferroelectric ceramic materials)例如鈦酸鋇(barium titanate)與鉛鋯鈦(plumbum zirconate titanate,PZT)因為具有較佳的特性,成為發展主流。 遲滯現象為壓電材料的一種特性,由材料來說,對於沒有經過特別處理 的結晶,由於各電域之極化方向隨機排列,總體之極化量為零。當外加電 場時,每一電域之極化方向會隨電場方向排列,而有一淨極化值;此時若 除去電場,因為分子間的摩擦關係造成其極化值並不回到零,會殘留淨值。 飽和極化後,除去電場所剩下的極化量,稱為殘留極化(remanent
polarization)。要讓極化回歸於零,需加一反向的矯頑電場(coercive field)。
這種極化與電場間之關係,使得上升路徑和下降路徑的不一致,稱為遲滯 曲線。壓電致動器在奈米級的運動路徑中,會出現追蹤誤差達全行程(Full scale)10~20%的遲滯現象。
2004 年(平成 16 年)日本小林理研研究所任暁兵 (Ren Xiaobing)發表 Fe-BaTiO3 與 K-BaTiO3 兩種壓電材料具有巨大的逆壓電效應[3]。圖 2.2 顯 示單層的Fe-BaTiO3 與單層的 PZT 對於電場的響應,雖然 Fe-BaTiO3 提供 了巨大的電歪效果,同時也暗示著更嚴厲的遲滯與非線性現象等待克服。
2.2 壓電致動器的基本特性
利用多層壓電材料堆疊而成的壓電致動器對於輸入之驅動電壓具有快 速響應之特性,使得壓電致動器受到原子力顯微鏡、白光干涉儀、高速伺 服閥、主動式避震器等設備之青睞。 在電壓驅動器提供足夠之電流與響應的條件下,壓電致動器能以1/3 其 共振頻率之速度完成標稱位移量之移動。例如,一個10kHz 共振頻率之壓 電致動器能在30μs 的時間到達標稱位移量。如果沒有經過適當的量測與廻 授補償,這種快速響應的特性將使得壓電平台產生嚴重的超越量。 o f T 3 1 ≈ (1) 式(1)說明在電壓驅動器提供足夠之電流與響應的條件下,壓電致動器之上 升時間。其中, T = time [s] fo = 壓電致動器共振頻率 [Hz] 電壓驅動器的雜訊是影響壓電致動器位置穩定(解析)的因素之一。當電壓 驅動器的雜訊頻率遠大於壓電致動器共振頻率,此雜訊對於壓電致動器之 定位可以忽略;如果電壓驅動器的雜訊頻率接近壓電致動器共振頻率,此 雜訊對於壓電致動器之定位影響甚大。 此ㄧ特性雖然與本文並無直接關係,但是將來進行控制時非常重要,特 別在此提出。2.3 壓電平台簡介
壓電致動器的輸出範圍有限,若要使平台的工作行程達到實用的目標, 就必須應用放大機構來放大壓電致動器的輸出。以壓電材料為致動器的設 計中,常見的平台機構形式有形變式、摩擦式與尺蠖式三種,形變式的優點在於系統有較高的解析度,但是缺點為系統的最大行程往往比其他兩種 設計形式短;此外,形變式擁有裝配容易與控制成本較低之優點。本文實 驗設備採用工研院機械所朱怡銘[4]先生設計之壓電平台,屬於形變式 X-Y 二自由度微定位平台之設計。 此一定位平台採用最大位移輸出為11.6µm 之壓電致動器,並採用對稱 型肘節放大機構(toggle mechanism)將行程放大數倍。由於預壓的關係, 壓電致動器的最大位移輸出遠低於標稱值。圖2.3 顯示對稱型肘節機構將 X 軸受力Fin 轉換成為 Y 軸施力 Fout 之幾何關係示意圖。 圖 2.3 對稱型肘節機構之幾何關係示意圖 圖 2.4 撓性鉸鏈 圖 2.5 撓性複接頭 圖2.6 平板葉片彈簧導引
圖 2.7 輸入滑動之導引彈簧
圖2.8 X-Y 二自由度微定位平台設計圖(圖中陰影長方形者為 PZT 壓電
致動器,每軸有兩支PZT)
為了滿足精密微定位之需求,此定位平台利用撓性結構加以微形化轉 換,其中
旋轉對:撓性鉸鏈(flexure hinge),如圖 2.4,使用於圖 2.3 點 A、B 處。 撓性鉸鍊是在結構上形成一尺寸最薄處,利用其最易變形的特點來達成旋 轉的功能。
此相隔120°的環狀分佈方式達成連接三個連桿的撓性複接頭功能。 輸出滑動對:平板葉片彈簧導引,如圖2.6。平板葉片彈簧導引的目的 在於提高輸出方向剛性,減少側向偏移量。 輸入滑動對:壓電致動器與導引彈簧,如圖2.7。導引彈簧主要目的是 將壓電致動器提供的位移及作用力經導引彈簧的導引,使工作平台與固定 座達到相對的位移效果。 完整的X-Y 二自由度微定位平台設計圖如圖 2.8,圖中陰影長方形者為 PZT 壓電致動器,每軸有兩支 PZT。X-Y 二自由度微定位平台採用 Y 軸搭 載在X 軸的輸出。此ㄧ串聯方式的優點在於可以大幅消除各軸間干涉問題, 且機構設計只需考慮單軸放大機構;串聯方式的缺點在於X 軸的負擔較 Y 軸大。實驗結果顯示,X 軸接受 100V 直流驅動電壓產生約 45µm 位移,Y 軸接受100V 直流驅動電壓產生約 60µm 位移。
2.4 實驗過程與數據
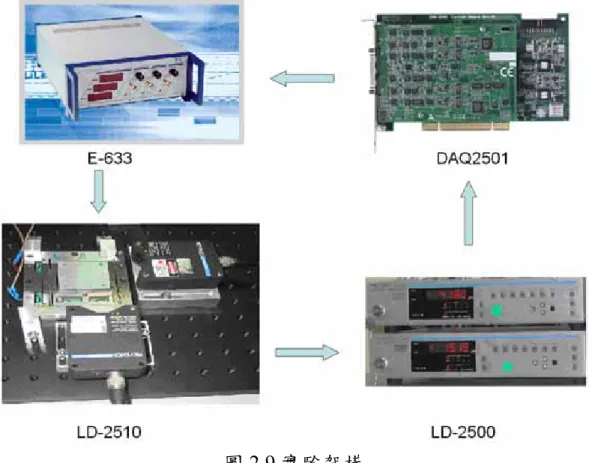
本研究架設一組X-Y 二自由度微定位平台,並且對此平台進行系統判 別。實驗架構如圖2.9,以下說明實驗設備與實驗結果。 雷射位移偵測器: Keyence LD2510+LD2500,以三角定位法測量目標位置,目標位置 可由面板數字顯示與類比輸出信號得知,類比信號輸出範圍±5V/±500µm。 AD/DA:ADLINK DAQ2501,具有 4-CH, 12-Bit, 1MS/s Analog Output 與 8-CH, 400 kS/s, 14-bit single-ended analog inputs;參考電壓最高±10v。
高壓驅動器:
PI E-663,具有 3 個獨立運作電壓輸出通道(Channel),每個通道最大
輸出功率14W,最大吞吐(source and sink)電流 140mA<5ms,平均吞吐電流
60A>5ms,輸入電壓 -2 到 12V,輸出電壓範圍 -20 到 120V。
將DAQ2501 架設於 PC 內部,使用 Labview 撰寫輸出命令趨使 DAQ2501
壓電平台施以50+50sin(ωt)弦波信號,壓電平台的位移經由雷射位移偵測
器感知,並且變更類比輸出值。此一類比信號透過DAQ2501 AD channel
讀取,經由Labview 資料擷取程式紀錄與存檔。
由實驗設備規格換算,AD 的讀值變換ㄧ個 LSB(Least Significant Bit)相
當於目標位置移動120.5nm。因此,量測解析度為 120.5nm/digit。
圖2.9 實驗架構
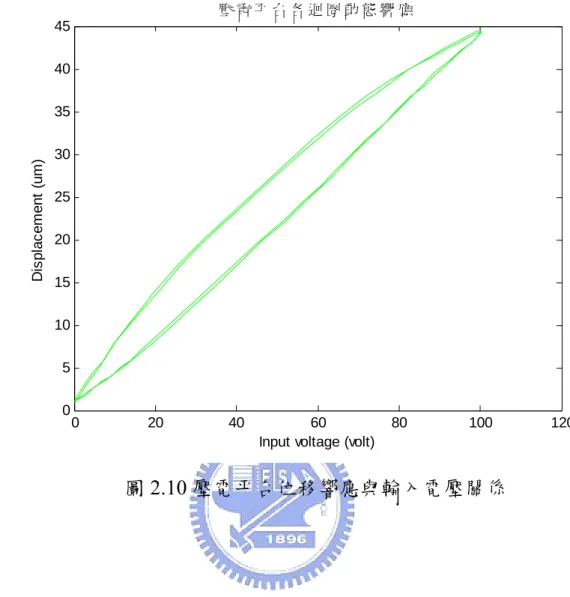
圖2.10 顯示,在高壓驅動器對壓電平台施以兩個週期的弦波信號時,壓
電平台位移響應與輸入電壓呈現響應遲滯的非線性關係,而且每個迴圈的 路徑存在著某種程度的非重複性。
0 20 40 60 80 100 120 0 5 10 15 20 25 30 35 40 45
Input voltage (volt)
D isp la ce m e n t ( u m ) 壓 電 平 台 各 迴 圈 動 態 響 應 圖2.10 壓電平台位移響應與輸入電壓關係
第三章 文獻回顧
由於奈米級定位系統實為奈米科技之基礎,近年來對於壓電致動器模型 之研究可說是不勝枚舉。文獻上的建模方式分為顯性模型和隱性模型。
3.1 Preisach 模型
P. Ge and M. Jouaneh[5]提出以輸入上升及下降時俱有不同轉換值
(switching value)和權重之 Preisach 遲滯模型建立前饋非線性補償控制器,並 搭配 PID (proportional integral derivative)進行回授控制。Preisach 模型的數 學式如下 β α γ β α µ β α αβ v t d d t v H S ( , ) [ ( )] )] ( [ ] , [ ,
∫∫
∈ = (2) 其中H[ tv( )]為系統輸出,v(t)為系統輸入,γα,β是Preisach 參數,其取決於 αβ 之值,而產生一個滑動控制項,其值為+1 或者是-1,µ(,):S|->R 是為一個權 重函數,S ={(α,β)|vmin ≤α ≤β ≤vmax} ,這在 αβ 平面上為一個三角形的區塊, } 1 )] ( [ | ] , {[ : } 1 )] ( [ | ] , {[ : , , − = ∈ = + = ∈ = − + t v S S t v S S β α β α γ β α γ β α (3) 其中vmin和vmax為輸入的最小和最大值。 (a):上升段 (b):下降段(c) 典型的 Preisach 遲滯模型 圖3.1 離散 Preisach 之工作方式。 (取自: http://euclid.ucc.ie/hysteresis/node17.htm)。 利用以上的定義,可以把原式(2)改寫成: β α γ β α µ β α γ β α µ αβ v t d d H v t αβ v t d d t v H S S ( , ) [ ( )] [ ( )] ( , ) [ ( )] )] ( [ =
∫∫
+ , − −∫∫
− , (4) 由(4)可以發現,決定H[ tv( )]值的參數取決於S+和S-(如圖3.1 的區域) 交界面出現的區域,而其界面是取決於輸入的變化如圖3.1。圖 3.1(a)代表 當輸入值上升,Preisach 模型輸出因權重值增加所產生之非線性曲線;圖 3.1(b)代表當輸入值減少,不對稱之 Preisach 輸出因權重值減少,產生另一 條與上升輸入值不重疊之非線性曲線。圖3.1(c)顯示,權重點適當地增加與 分布,將產生典型Preisach 模型。此模型優點在於具有明確的數學式,方便 模型輸出值計算。不便處則在於參數難以即時上傳至演算式,使得物理參 數無法即時演算得到最適切的遲滯迴圈,而且其積分的動作會增加計算的 困難度。3.2 電荷控制
P. Ronkanen 等人[6]發現,壓電致動器的形變響應與輸入電荷呈現正比 關係,而且壓電致動器潛變(Creep)現象可以解釋為漏電現象。 實驗發現,壓電致動器對於輸入的300nA 步階電流,產生線性形變斜坡 響應,40 秒之後形變到達 170μm。之後如欲維持壓電致動器的變形量於某 一固定值(非 170μm 處),必需持續供應壓電致動器 5nA 電流。圖 3.2 顯示 對於壓電致動器提供靜態消耗電流,就能克服壓電致動器潛變的現象。為了利用壓電致動器之形變與輸入電荷呈現線性關係之優點,P. Ronkanen 等人提出以系統鑑別之方式,求出壓電材料之漏電阻抗模型,並 運用前饋補償之方式,改善定位精度。 圖3.2 壓電致動器靜態消耗電流
(
3.4 10)
1 21 2 7 × + × Ω = i G X (5)( )
( ) ( )
( )
( )
X t V t i t i t i t it = c + l = c + (6) 但是此一方法必須使用解析度為10pA 的電流感知器才能滿足電荷計算 之需求,但是此一電流感知器的電流吞吐量將限制了壓電致動器之響應速 度。3.3 小腦模型類神經網路
S. S. Ku 等人[7]使用小腦模型類神經網路(A cerebellar model articulation controller (CMAC) neural network),疊代學習壓電致動器結合撓性鉸之平台
逆系統模型。圖3.3(a)顯示小腦模型類神經網路應用查表方式,將各個參數
憶體內的記憶內容加乘相加成為CMAC 輸出值。CMAC 輸出值和期望值作 比較,其差值再平均分佈在各個原本取出的記憶空間。此一方式對非線性 系統參數,具備適應性學習、快速收斂之類化(generalization)能力。圖 3.3(b) 顯示小腦模型利用PID 控制器的輸出值隱含著前饋控制器補償值與系統響 應之誤差,疊代學習壓電致動器結合撓性鉸之平台逆系統模型。此方法對 軌跡追隨問題有其實用性。對於動態響應具有重複性的系統,[8]小腦模型 已經證實了在多次學習之後,CMAC 輸出值可以逼近期望值。 (a) 小腦模型映射示意圖 (b) CMAC 搭配 PID 離散控制系統控制架構圖 圖 3.3 小腦模型映射示意圖與控制架構圖 由於CMAC 對於雜訊很敏感,當追蹤軌跡具有高頻分量時,CMAC 容
易出現不穩定現象。雖然C.C. Lin 等人[9]提出藉由修改疊代學習權重與增 加不反應區方式,但是當追蹤軌跡存在著三角波、步階等非可微分函數之
高頻分量時,仍然無法改善CMAC 不穩定現象問題。
3.4 Maxwell slip model
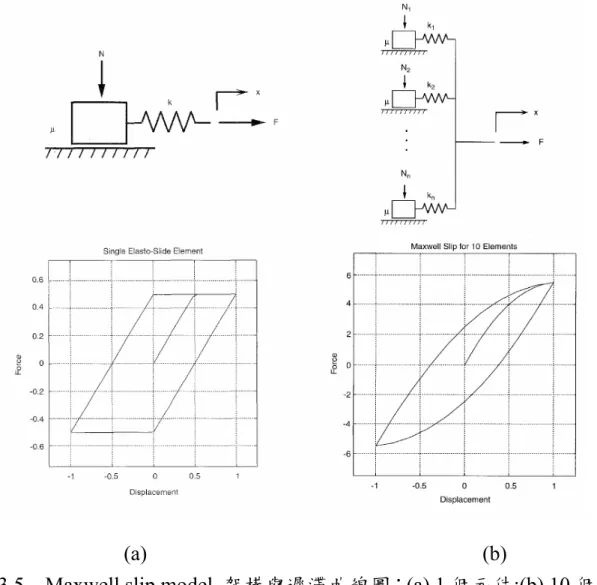
M. Goldfarb[10]、G. S. Choi[11]與 T. J. Yeh [12] 等人則以 Maxwell slip model 建立遲滯模型,利用簡單的機械元件描述遲滯的非線性。 這模型是利用一群包含滑塊、線性彈簧的簡單機械平移系統所組成,藉 外力與位移間的關係來建立其遲滯非線性關係。但此模型為靜態模型,與 速度、加速度或頻率無關。可調整的參數多達十多個以上。M.Goldfarb 考 慮電機內部包含電荷與遲滯電壓之關係,將此遲滯模型帶入其中,得到完 整壓電致動器模型。 圖3.4 利用多個並聯彈滑元件來模擬遲滯曲線 當多個彈滑元件組成如圖 3.4 的結構時,其方程式如下: ⎪ ⎪ ⎩ ⎪ ⎪ ⎨ ⎧ ≥ − × − = × = < − − = i i b i i i i b i i i i b i i b i i f x x k x k f x x x f F f x x k x x k F ) ( for , ) sgn( and ) sgn( ) ( for , ) ( & & (7a)
F =
∑
Fi (7b) 其中 ki、 fi、xbi分別代表為第i個彈滑元件之虎克常數、庫倫摩擦力、滑塊 之初始位移值;而其輸入為多個彈滑元件所組成的系統位移值(如圖3.4 中 的輸入x),F為輸出之力量,x&則是其輸入位移對時間的變化量,也就是輸 入的速度。 當彈滑元件之彈力大於庫倫摩擦力時,滑塊開始移動,進入滑動區。若 是組合多個彈滑元件,各彈滑元件受力Fi由各彈滑元件參數ki、xbi計算,然 後輸出的力量相加。以上的方程式代表了一個很重要的意義,就是當彈滑 元件的滑塊元件開始滑動,其外加施力只需克服庫倫摩擦力,而位移增加 並不能使彈簧伸張量增加,而使得力量上升。 (a) (b)圖3.5 Maxwell slip model 架構與遲滯曲線圖:(a) 1 個元件;(b) 10 個元
件。
的曲線。若為十個彈滑元件所並聯,則為圖3.5(b)路徑。式(7a)第二項 i i b i i i i b x k x x f k f x x = − ×sgn(&) ,for ( − ) ≥ 針對彈滑元件進入滑動區時,隨時修正xbi值,使得sgn(x& )變號的瞬間, i i b i x x f k ( − ) < ,彈滑元件立即由滑動區進入線性區。
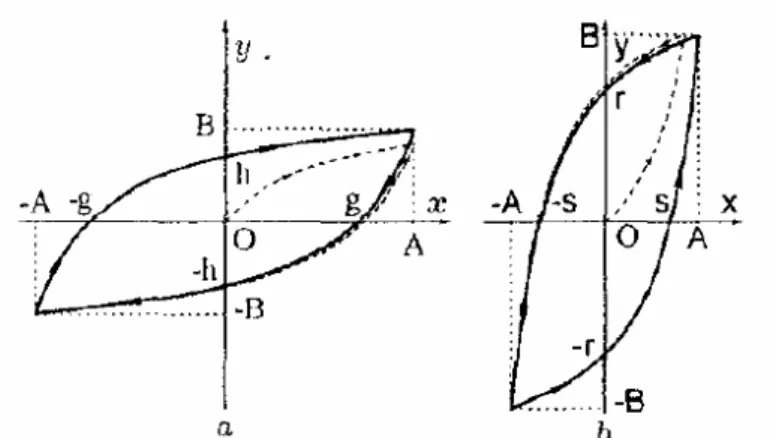
Y. 1. Somov[13] 提到遲滯曲線分成 type A (順時針,圖 3.6(a))與 type B(逆時針,圖 3.6(b))兩種,並且說明壓電致動器之遲滯曲線屬於 type B。從
圖3.6 可以看出若限定
(
x−xbi)
不得小於零,則 Maxwell slip model 僅能逼近Type A 的遲滯曲線。本文提出改良型 Maxwell 彈滑模型,使其適用於 Type B
的遲滯曲線,並且利用遞迴最小平方和誤差法學習改良型Maxwell 彈滑模
型以求得最佳的元件參數值,一舉解決係數設定的問題,作為日後控制壓 電平台的基礎。
第四章 彈滑模型的改良與參數鑑別
根據前一章Maxwell slip model 之說明,本研究修改滑車架構,將參數xbi
解釋成間隙參數,並且利用遞迴最小平方和誤差法即時求取模型參數的最 佳係數值,作為日後控制壓電平台的基礎。
4.1 改良型 Maxwell 彈滑模型
過去所發表的Maxwell slip model 雖然利用式(7a)第二項
i i b i i i i b x k x x f k f x x = − ×sgn(&) ,for ( − ) ≥ 修正xbi值,使得sgn(x& )變號的瞬間 ki(x−xbi) < fi ,彈滑元件立即由滑動區
進入線性區。但是不論sgn(x& )>0 或者 sgn(x& )<0,依據式(7a)、(7b)所繪之遲
滯曲線必然存在對稱性。若使用此一具對稱性的遲滯曲線預測實際的壓電 平台響應,將遭遇極大的預測誤差。針對實際的壓電平台響應曲線多為非 對稱之特點,本研究將彈滑元件區分為兩組,並依據sgn(x& )>0 以及 sgn(x& )<0 之狀態,選擇啟動一組彈滑元件。 由於每個滑塊增加一組間隙參數,當(x−xbi)×sgn(x& )<0的時候,並不啟動 該組彈滑元件。透過適當安排參數xbi,使得彈滑元件Fi依序影響輸出力量
F,達成修正Maxwell slip model 的目的,使其適用於無對稱性 Type B 遲
滯曲線。
式8(a)說明改良型 Maxwell 彈滑模型單一彈滑元件位移與施力響應關
係,式8(b)說明系統響應方程式。
圖4.1(a)(b)分別顯示改良型 Maxwell 彈滑模型架構圖以及彈滑模型響應
bi n i i b i i i i i b i i b i i n i b i x x x f x x k f F f x x k x x k F x x x F − = ⎪ ⎩ ⎪ ⎨ ⎧ ≥ − = < − − = < × − = ) ( for , ) ( for , ) ( 0 ) sgn( ) ( for , 0 & (8a) ) sgn( ) sgn( for , ) sgn( all for , 1 1 − − ≠ = =
∑
n n n n n i n x x F F x F F & & & (8b)(a)
(b)
圖4.1 改良型 Maxwell 彈滑模型 (a)架構圖; (b)響應曲線
4.2 決定彈滑元件的參數
傳統的Maxwell slip model 因為採用並聯的彈滑元件,在求取元件參數
的時候將遭遇參數耦合的問題。T. J. Yeh [12]以 linear programming [14]方 式,先算出最後一個彈滑元件的參數,再由後往前代入下一個。 4.1 節討論的改良型 Maxwell 彈滑模型,將彈滑元件改為串聯方式,消 除了參數耦合的問題,也就是任何時刻,只有一顆彈滑元件處於線性工作 區,其餘元件不是尚未啟動,就是進入滑動狀態。這使得彈滑元件參數鑑 別的問題,變成了如何使用一顆彈滑元件描述遲滯曲線某一區段的曲線擬 合問題。 由於壓電平台響應曲線具有非重複的特性,而量測系統又存在著雜訊干 擾,我們只能期望經由實驗數據,在某一段壓電平台響應曲線中,找出一 個彈滑元件之 k 值,使得由此 k 值描述的直線與實驗數據所形成的曲線誤差 最小。 對於彈滑元件 k 值的訓練,能被闡述為一個最佳曲線擬合的問題[14],
所以採用遞迴最小平方和誤差法,適當地選擇彈滑元件之 k 值,使得彈滑元 件所描繪的直線與遲滯曲線之間的平方和誤差最小。附錄記載了利用遞迴 最小平方和誤差法(Recursive least-squares algorithm)求取彈滑元件參數的 過程。 但是,應該使用幾個彈滑元件以及何時啟動下一個彈滑元件? 下一節將 探討彈滑元件數量以及參數xbi的決策機制。
4.3 彈滑元件數量的決策機制
T. J. Yeh [12]採用等間距的方式對 X 軸等分 N 個區段,經由量測實際值 與估測值的差異,決定區段數量N 的增減。本研究提出一種決策機制,開 放一個閥值參數(Threshold)供操作者設定使用,當遲滯曲線的量測實際值與 改良型Maxwell 彈滑模型之輸出估測值的絕對誤差大於閥值參數時,將命 令改良型Maxwell 彈滑模型增加一組新的彈滑元件,加入遞迴計算。 0 10 20 30 40 50 60 -2 0 2 4 6 8 10 12Input voltage (volt)
D isp la ce m e n t ( u m ) Threshold = 0.8 um err y(v) Fn 圖4.2 改良型 Maxwell 彈滑模型依據估測誤差與閥值參數,增加一組新 的彈滑元件 圖4.2 說明改良型 Maxwell 彈滑模型依據估測誤差與閥值參數,增加一
組新的彈滑元件的情形。綠色連續曲線表示壓電平台對輸入電壓的模擬位 移響應y
( )
v 。紅色點狀表示改良型Maxwell 彈滑模型利用 4.2 節所述遞迴最 小平方和誤差法即時計算第一顆彈滑元件參數,並且利用第一顆彈滑元件 描述壓電平台對0~41 伏特輸入電壓的響應曲線進行估測的結果Fn。下方的 藍色連續曲線表示壓電平台遲滯曲線與彈滑元件估測的誤差err = y( )
v −Fn。 由於壓電平台對輸入電壓的遲滯曲線y( )
v ,在41~42 伏特附近出現明顯的轉 折點,第一顆彈滑元件對壓電平台響應曲線的估測誤差將超過閥值參數 (Threshold)。因此,在輸入電壓 42 伏特處,產生了第二顆彈滑元件,並使用 輸入電壓42 伏特之後的遲滯曲線值計算第二顆彈滑元件參數。4.4 模型參數鑑別流程
整理前述章節,將本研究遲滯模型之建立與參數鑑別方式整理如下: 令 ) (t v :輸入之電壓對時間函數。( )
v y :壓電平台對輸入電壓之位移響應。 且( ) (
v t nT)
y Y n n =∑
∗ − ∞ = δ 1 (9)( ) (
t t nT)
v xn = ∗δ − 其中,T 為取樣週期,( )
⎩ ⎨ ⎧ ≠ = = 0 0 0 1 t for t for t δ 設定初始值P1 =1,k1=0,令Fn+1=Yn代入遞迴最小平方和誤差法(Recursive least-squares algorithm),就可以得到針對y
( )
v 逐次疊代修正彈滑元件之kn+1值:
[
n n n]
n n T n n n n n F x k x P x x P k k 1 1 1 1 1 1 1 + + + + + + = + + − 1 1 1 1 1 1 + + + + + = − + n n T n n T n n n n n x P x P x x P P P 令ki=kn+1代入改良型 Maxwell 彈滑模型,得到改良型 Maxwell 彈滑模型 之輸出值Fn:bi n i i b i i i i i b i i b i i n i b i x x x f x x k f F f x x k x x k F x x x F − = ⎪ ⎩ ⎪ ⎨ ⎧ ≥ − = < − − = < × − = ) ( for , ) ( for , ) ( 0 ) sgn( ) ( for , 0 & ) sgn( ) sgn( for , ) sgn( all for , 1 1 − − ≠ = =
∑
n n n n n i n x x F F x F F & & & 本研究增加一個閥值參數Threshold供操作者使用,當壓電平台的響 應Yn與改良型Maxwell 彈滑模型之輸出Fn的絕對誤差大於閥值參數 Threshold,將遞迴最小平方和誤差法所計算之kn、輸入電壓取樣值xn、壓電 平台響應值Yn,分別儲存至改良型Maxwell 彈滑模型之彈滑元件參數ki、 bi x 、 fi,然後命令改良型Maxwell 彈滑模型增加一只新的彈滑元件,加入 遞迴計算。圖4.3 說明改良型 Maxwell 彈滑模型根據壓電平台響應曲線取樣 值進行遞迴最小平方和誤差法,計算彈滑元件參數ki的流程。圖4.3 使用遞迴最小平方和誤差法計算改良型 Maxwell 彈滑元件參數流 程圖
4.5 模型參數鑑別結果
利用2.4 節的實驗數據,驗證改良型 Maxwell 彈滑模型。實驗證明,利 用遞迴最小平方和誤差法逐次疊代修正改良型Maxwell 彈滑元件參數之結 果確實能夠有效預測壓電平台次一廻圈之動態行為。 令閥值參數Threshold設定為0.5µm,遞迴最小平方和誤差法針對經過取 樣的壓電平台響應Yn逐次疊代修正並產生一組3*6 Maxwell 彈滑元件參數, 結果如表4.1。 表4.1 對經過取樣的壓電平台響應Yn逐次疊代修正並產生彈滑元件參數 結果 參數/數量 1 2 3 4 5 6 i b x 0 9.1877 19.538 97.908 65.378 21.593 i F 1.205 3.9765 8.3145 43.862 33.981 14.46 i k 0.3547 0.3547 0.44513 0.2777 0.42597 0.59484 0 20 40 60 80 100 120 -5 0 5 10 15 20 25 30 35 40 45Input voltage (volt)
D isp la ce m e n t ( u m ) Threshold = 0.5um err y(v) Fn 圖4.4 逐次疊代修正產生的改良型 Maxwell 彈滑元件與實驗數據比較
圖4.4 綠色連續曲線代表壓電平台對應輸入電壓的響應曲線Yn;紅色點 狀代表改良型Maxwell 遲滯模型對應輸入電壓的響應曲線Fn;下方的藍色 點線表示誤差 err =Yn −Fn。由表 4.1 參數xbi的數值分布可以看出來,彈滑 元件1、2、3 描述壓電平台上升響應曲線,彈滑元件 4、5、6 描述壓電平 台下降響應曲線;壓電平台上升曲線的轉折點集中在輸入電壓20 伏特以 下,壓電平台下降響應曲線之轉折點則較為分散。 為了驗證本方法所得之改良型Maxwell 彈滑模型是否能有效地預測壓 電平台次一廻圈之動態行為,使用第一迴圈實驗數據所產生的改良型 Maxwell 彈滑模型與第二迴圈實驗數據比較,結果如圖 4.5。相較於圖 4.4, 雖然圖4.5 顯示較大的 err,但是仍然小於壓電平台的非重複性誤差。 0 20 40 60 80 100 120 -5 0 5 10 15 20 25 30 35 40 45
Input voltage (volt)
D isp la ce m e n t ( u m ) 使 用 第 一 迴 圈 產 生 的 彈 滑 元 件 參 數 預 測 第 二 迴 圈 實 驗 數 據 err y(v) Fn 圖4.5 使用第一迴圈實驗數據逐次疊代修正產生的改良型 Maxwell 彈滑 元件參數預估壓電平台次一廻圈響應結果
第五章 結論與未來發展方向
5.1 結論
雖然使用壓電致動器的奈米級定位系統因為具有體積小、重量輕響應 快、解析度高等特性,然而壓電材料固有的遲滯現象(Hysteresis)卻會降低動 態響應特性及定位精度,使得輸入輸出呈非線性關係。為了減低遲滯現象
對壓電平台的影響,本文以Maxwell slip model 為基礎,修改成為一套改良
型Maxwell 遲滯模型,作為描述壓電平台遲滯現象的有效模型,並利用遞
迴最小平方和誤差法(Recursive least-squares algorithm)針對此模型發展一 套即時參數鑑別法則。 實驗證明,此一改良型Maxwell 遲滯模型經過遞迴最小平方和誤差法之 即時參數鑑別,具有結構簡單、參數少、適應性強等優點。
5.2 未來發展方向
未來將根據H. Tolle[15] 所提之控制架構,以此一改良型 Maxwell 遲滯 模型在開迴路架構下設計一前饋補償器(Feedforward compensator),如圖 5.1 所示,以補償遲滯效應所造成的相位延遲及定位誤差,並且設計回授控制 器以增加系統之強健性。 圖5.1 前饋補償器 + c3 BP Up(k) inverse dynamic P_controller E(k) Piezo stage c1 Uc(k) + Input signal ~G_1(s) + c2 G_1(s)-1.modelling parameters by error feedback 2.compensation decision
Y(k) U(k)
G(s) Yd(k)
參考文獻
[1] S. Vorndran, “Why Nanopositioning is More than Just Nanometers—or How to Find a State-of-the-Art System”, Physik Instrumente, 2002-2003 [2] Physik Instrumente,“MicroPositioning, NanoPositioning,
NanoAutomation Solutions for Cutting-Edge Technologies”, Physik
Instrumente Piezo-University, 2001
[3] X. Ren, Nature Materials, 3, 91-94, 2004
[4] 朱怡銘, “奈米級 XYZ 三自由度微定位平台之設計製造與分析”,國立 臺灣大學機械工程學研究所碩士論文,1999
[5] P. Ge and M. Jouaneh, “Tracking control of a piezoelectric actuator”,
IEEE Transactions on Control Systems Technology, vol.4, no.3, pp.
209-216, 1996
[6] P. Ronkanen, P. Kallio, H.N. Koivo, “Current control of piezoelectric actuators with power loss compensation”,Intelligent Robots and System,
2002. IEEE/RSJ International Conference on 1948- 1953, vol.2, 2002
[7] S. S. Ku, U. Pinsopon, S. Cetinkunt and S. Nakajima,“Design, fabrication, and real-time neural network, control of a
three-degrees-of-freedom nanopositioner", IEEE/ASME Transactions on
Mechatronics, vol. 5, no. 3, 2000
[8] T. Tao, T.H. Hung and S.F. Su, “ Credit assigned CMAC and its
application to online learning robust controllers”, IEEE Transactions on
Systems, Man , and Cybernetics , Part B- Cybernetics, vol.33, no.2, 2003.
[9] C.C. Lin;, F.C. Chen, “On a new CMAC control scheme, and its
comparisons with the PID controllers”, American Control Conference, vol.2, pp. 769-774 2001
[10] M. Goldfarb and C. Nikola ,“Modeling piezoelectric stack actuators for control of micromanipulation”, IEEE Control Systems Magazine, vol. 17, pp. 69-79, 1997
[11] G. S. Choi, H. S. Kim and G. H. Choi,“A study on position control of piezoelectric actuators”, Proceedings of the IEEE International
[12] T.J. Yeh, S.W. Lu, and T.Y. Wu, ”Modeling and Identification of Hysteresis in Piezoelectric Actuators”, Journal of Dynamic Systems,
Measurement, and Control, Vol. 128, Issue 2, pp. 189-196, June 2006
[13] Y. 1. Somov, “Modelling Physical Hysteresis and Control of a fine Piezo-drive”, Physics and Control, 2003. Proceedings. 2003 International
Conference, Vol. 4, pp. 20-22, Aug. 2003
[14] E.K.P. Chong, S.H. Zak, An Introduction to Optimization, second edition, John Wiley & Sons (Asia) Pte. Ltd.
[15] H. Tolle, "Learning control and its place in automation", Intelligent
Systems Engineering, 1994, Second International Conference on `Intelligent Systems Engineering',(CP395), p. 9 -36 Sept. 1994
附錄 A
A.1 The least-squares Optimization Problem
考慮雜訊對於彈滑元件的影響,預期彈滑元件的虎克常數 k 與位移變數 x、施力 Fi的關係為 ⎪ ⎪ ⎩ ⎪ ⎪ ⎨ ⎧ + = + = + = n n n F kx F kx F kx ε ε ε 2 2 2 1 1 1 M Î ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ n n n F F F x x x k ε ε ε M M M 2 1 2 1 2 1 (A1) 其中xn =
(
xi −xbi)
,εi 表示第i次測量誤差 ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = n n n F F F x x x ε ε ε M M M 2 1 2 1 2 1 , , F e x 將上述式子寫成向量矩陣形式 e F x− = k (A2) 欲使用一顆彈滑元件描述遲滯曲線的某一區段,必須求解該彈滑元件之 k 值(虎克常數)。這個對於彈滑元件 k 值的訓練問題,能被闡述為一個最 佳化的問題。利用最佳化的最小平方和誤差法,適當地選擇彈滑元件之 k 值,使得彈滑元件所描繪的直線與遲滯曲線之間的平方誤差和最小。 此一彈滑元件 k 值的訓練問題,寫成數學式(
x F) (
x F)
e e − − = k T k k T k min min (A3) 這是一個無邊界且過度限定的系統,適合利用最小平方和誤差法求彈滑 元件 k 值最佳解。設成本函數 J,( ) (
) (
)
(
)
(
)
F F F x x x F F x F F x x x F x F x F x F x J T T T T T T T T T T T T T T T k k k k k k k k k k k k + − = + − − = − − = − − = 2 (A4) 根據Chong’s book[14] Ch6.2 二階充分條件,( )
( )
0 0 2 2 * * 2 2 * * * > = ∂ ∂ = = − = ∂ ∂ = ∇ x x e e F x x x e e J T k T T T k T k k F k k k (A5) 其中,( )
* k J ∇ 是成本函數 J對k的一階微分,然後取轉置矩陣。( )
* k F 是成本函數 J 對k的二階微分。 從∇J( )
* =2 *−2 =0 F x x xT k T k 可以得知在k*處,成本函數 J 存在著區域性 的極值。由於2 *−2 =0 F x x xT T k ,可以得知( )
x x x F F x x x T T T T k k 1 -* * = = (A6) 意即,存在唯一最佳解 * k k = ,使得彈滑元件所描繪的直線與遲滯曲線的 平方誤差和最小。 圖A.1 顯示利用 k* =( )
xTx-1xTF 對於一組數據進行最佳化線性迴歸批次 計算的結果。0 5 10 15 20 25 0 0.2 0.4 0.6 0.8 1 1.2 1.4
Input voltage (volt)
D isp la ce m e n t ( u m ) LS 對 一 組 數 據 進 行 最 佳 化 線 性 迴 歸 批 次 計 算 LS 數 據 圖A.1 利用最小平方和誤差法對於一組數據進行最佳化線性迴歸批次計 算結果
A.2 Recursive least-squares algorithm
前面提到,存在唯一最佳解k*=
( )
xTx-1xTF,使得彈滑元件所描繪的直線與遲滯曲線的平方誤差和最小。如果每次都要重新計算
( )
xTx -1,不但耗費時間而且必須等候所有資料收集完整才能進行計算。為了減少
( )
xTx -1計算時間,利用遞迴最小平方和誤差法(Recursive least-squares algorithm)逐次疊 代修正彈滑元件之 k 值。 彈滑元件的虎克常數 k 與位移變數 x、施力 Fi的關係為 ⎪ ⎪ ⎩ ⎪ ⎪ ⎨ ⎧ + = + = + = n n n F kx F kx F kx ε ε ε 2 2 2 1 1 1 M Î ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ n n n F F F x x x k ε ε ε M M M 2 1 2 1 2 1 (A7) 其中xn =
(
xi −xbi)
,εi 表示第i次測量誤差 ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = n n n F F F x x x ε ε ε M M M 2 1 2 1 2 1 , , F e x 利用N 組實驗數據可以求得最佳解(
)
n T n n T n n k* = x x -1x F (A8) 當增加一組新的實驗數據,便形成一組新的方程式 1 1 1 + + + = n + n n F kx ε 將此方程式併入既有的N 組方程式,並解出新的最佳解 * 1 + n k ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + + + 1 2 1 1 2 1 1 2 1 n n n n n n F F F F x x x x k ε ε ε ε M M M Î(
)
1 1 -1 1 1 * 1 + + + + + = n T n n T n n k x x x F (A9) 為了省下重新計算(
+1 n+1)
-1 T n x x 的時間,使用矩陣反演公式(the matrix inversion lemma)(
+)
−1 = −1− −1(
−1 + −1)
−1 −1 DA B DA C B A A BCD A (A10)並且令 =

![圖 2.1 顯示鉛鋯鈦(plumbum zirconate titanate,PZT)晶體極化前後的 晶格變化。 (a)極化前 PZT 晶格呈現立方對稱;(b)當溫度低於居禮溫度(Curie temperature),晶格因自發極化而顯現非對稱變形[2]。](https://thumb-ap.123doks.com/thumbv2/9libinfo/8396200.178959/11.892.183.773.374.1072/前後晶格變化極化晶格呈現立方對稱當溫度低禮溫Curie晶格因自發極.webp)