行政院國家科學委員會專題研究計畫 期中進度報告
寬頻光都會與擷取網路之關鍵技術--子計畫一:高速光子交
換及被動接取光網路之研究(2/3)
期中進度報告(精簡版)
計 畫 類 別 : 整合型 計 畫 編 號 : NSC 95-2221-E-002-184- 執 行 期 間 : 95 年 08 月 01 日至 96 年 07 月 31 日 執 行 單 位 : 國立臺灣大學電信工程學研究所 計 畫 主 持 人 : 吳靜雄 公 開 資 訊 : 期中報告不提供公開查詢中 華 民 國 96 年 06 月 01 日
行政院國家科學委員會專題研究計劃成果報告
高速光子交換及被動接取光網路之研究─子計畫一
(2/3)
計劃編號: NSC-95-2221-E-002-184 執行期限:95 年 8 月 1 日至 96 年 7 月 31 日 主持人:吳靜雄教授參與人員:Malla Reddy Perati、黃富源、邱建林、楊有為、陳仲軒、吳柏毅、
余靖涵、陳培霖、戴嘉瑩
中文摘要
網 際 網 路 已 融 入 人 們 日 常 生 活 中,也是資訊取得及傳播的利器,因 其用戶數迅速增加,寬頻需求殷切, 一個好的交換技術是必須要的,而光 封 包 交 換 技 術 結 合 了 分 波 多 工 的 技 術,具備了高速交換能力,高資料傳 輸速度與格式通透性,在未來即將在 通訊領域中扮演重要的角色。本研究 主題為(1)於馬可夫模型之自相關傳 輸量輸入下的光封包交換機之研究及 (2)二維光分碼系統特性之探討。 首先,我們研究使用部分緩衝分 享機制下之光封包交換機在馬可夫模 型之自相關傳輸量輸入下的封包遺失 行 為 。 兩 種 優 先 權 的 分 類 在 此 被 考 慮,此兩者都是自然自相關,且靠著 兩個獨立的馬可夫抵達程序來近似。 緩衝記憶體的門檻值把佔領緩衝記憶 體的狀態空間分成兩個部分,當此週 期時間被假設成隨意發生,此種分割 將依次給予緊要的與非緊要的週期時 間。因此,我們研究與分析短時間與 長時間的效能估量,恰當的分析結果 已被計算出且被模擬結果所驗證,當 光交換機在自相關傳輸量輸入下提供 不同的服務時,我們的分析對於最佳 化的緩衝記憶體控制是有用的。 其次,我們將指出分波多工的光 封包交換機若使用波長轉換時,在馬 可夫模型之自相關傳輸量輸入下,其 效能會因採用波長轉換的技術而有好 處。我們已經計算出分析的結果,且 被模擬所驗證,我們提出一種程序去 計算數值結果,並減少了計算的時間 與複雜度,在獲得分波多工之光封包 交換機的滿意效能上,我們的分析是 非常有用的。 最後,我們探討二維光編碼的特 性,並研究系統架構,在光域上分波 多工不需考慮同步問題,但在時域編 碼分為同步及非同步兩種,我們比較 各種編碼之後發現完美差異碼具許多 優點,所以我們將其應用在系統中並 完整的評估其效益,數值結果顯示此 系統之同時使用者數目及錯碼率均優 於其他系統。另外,因光纖已被大量 使用,我們也提出二維光域及空域接 取網路。Abstract
Internet has been utilized worldwide, the number of users grow rapidly. The demand of bandwidth increases tremendously. A good switching technology is required, and optical packet switching (OPS) incorporating with wavelength division multiplexing (WDM) technology, which has high-speed switching capability, high data rate and format transparency, is an attractive in the near future. The topics of this search are to investigate optical packet switches under Markovian modeled self-similar traffic input and optical code division multiple access (OCDMA) system.
First, we investigate the loss behavior of optical packet switches (OPSes) employing partial buffer sharing (PBS) mechanism to provide differentiated services under Markovian modeled self-similar traffic input. Two priority classes are considered; both are self-similar in nature and are fitted by two independent Markovian arrival processes (MAPs). The level of buffer threshold divides the state space of the buffer occupancy into two parts. Such a partition in turn gives the critical and non-critical periods which are assumed to occur alternatively. Accordingly, we investigate and analyze both the short term and long term performance measures. Pertinent analytical results are computed and then verified by simulation. Our analysis is useful in telling the optimal control of buffer of
OPS handling self-similar traffic to provide differentiated services.
Second, we make the switching performance of wavelength division multiplexing (WDM) optical packet switch (OPS) employing wavelength conversion (WC) techniques under Markovian modeled self-similar traffic input to point the benefit of wavelength conversion. The analytical results are calculated and verified by simulation. We propose a procedure to calculate the numerical results in order to reduce the effort of computation. The computation complexity of the analysis is then presented. Our analysis is useful in dimensioning the WDM OPS to obtain satisfactory performance.
Last, we study two-dimensioned (2-D) Optical Code Division Multiple Access (OCDMA) techniques, several 2-D OCDMA systems were investigated, we have found that the Perfect Difference Code (PDC) have many advantages. Therefore the spectral/time OCDMA system utilizing PDC is investigated completely. The results show that this system has good performance. In
addition, because the fibers are deployed in the cities and many residential areas, we also propose a spectral/spatial 2D OCDMA system, which may also applicable for wideband access network.
Keywords: Differentiated service, Markovian arrival process, matrix-analytic method, partial buffer sharing, self-similar traffic, MAM, MAP,
self-similar traffic, WDM optical packet switch, wavelength conversion, OCDMA, perfect difference code.
一、
研究內容與討論
(1) Loss Behavior Analysis of Optical Packet Switches Employing Partial Buffer Sharing Mechanism under Markovian Modeled Self-Similar Traffic Input
I. Queiueing Model of OPS Employing PBS Mechanism
Currently, due to the lack of optical random access memory (ORAM), only the passive type buffer management schemes are feasible to be realized in the high-speed optical switching nodes. Among the passive buffer management schemes, PBS mechanism is the most suitable one for OPS. This is because (1) optical buffers consisting of FDLs with fixed delay granularity can not arbitrarily hold the packets for a random amount of time, (2) the erasable optical buffers are not available yet for implementing push-out scheme. Also, due to the implementation, OPS of output queueing type is most feasible. Hence, the equivalent queueing model of a specific output port of the OPS with a service discipline of first-come-first-serve (FCFS) is equal to that of a multiplexer.
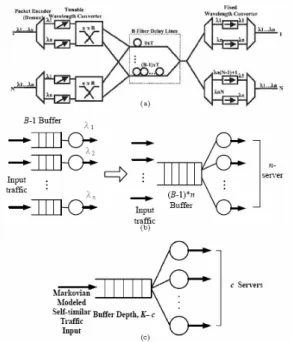
A general block diagram of OPS employing PBS mechanism is shown in the left hand side of Fig. 1, where there
are N input ports and N output ports each having K +1 fiber delay lines (FDLs) constituting the optical buffers with buffer depth K. When the input traffic is with a fixed packet length and the OPS is operating at a synchronous mode, then the suitable choice of the delay unit, h, in each FDL is to let h equal the packet length of the input traffic measured in time. Consequently, the equivalent queueing model of one specific output port of the OPS employing PBS mechanism can be depicted in the right hand side of Fig. 1, in which, a buffer with buffer depth K and a threshold set at the buffer level
, 0
K−d d≥ [21]. As shown in Fig. 1, the low priority packets can only access the ‘K− −d 1’ buffer spaces, whereas the high priority packets can utilize the whole buffer space regardless of the threshold levelK−d. Accordingly, we can define the “critical period” as the time period during which the buffer occupancy is greater than or equal to
K−d, and the “non-critical period” as the time interval during which the buffer occupancy is less than K−d [19], [21]. In this report, we assume that the packet length is fixed and constant. Hence the resultant queueing system of OPS employing PBS mechanism handling Markovian modeled self-similar traffic with fixed packet length is equivalent to an MAP/D/1/K queue with PBS policy.
Fig. 1 A general block diagram of the OPS employing PBS mechanism and the equivalent queueing model of a specific output port of the same one with two different priority traffic input.
II Loss Behavior Analysis
Now we could analyze the loss behavior of OPS employing PBS mechanism with MAP modeled self-similar input traffic. For the sake of simplicity, two priorities are considered. Each priority traffic is characterized by a MAP emulating self-similar process. Higher priority (class 1) and lower priority (class 2) packets arrive at the system according to MAPs of states m1 and m , respectively. The above MAPs 2 are characterized by the matrices { (1),C D(1)} and { (2),C D(2)} , respectively. The service time is generally and identically distributed with distribution function H(t). Let
( )
( )( 0, 1, 2)
k m
D t m≥ k= denote the
matrices whose ( , )i j th element is the probability that given departure of class k at time 0, there is at least one packet left in the system and the process is in state i, the next departure of class k occurs no later than time t with the
arrival process in state j, and during that service time there are m arrivals. Then
( )
( )
k m
D t satisfies the following equation
( ) [ ( ) ( ) ] 0 0 ( ) ( ), 1, 2. t k m C k D k z m m D t z e dH k τ τ ∞ + = = =
∑
∫
When service time is deterministic and is h units/packet, then we have
( ) [ ( ) ( ) ] 0 ( ) ( ), 1, 2. k m C k D k z h m m D t z e u t h k ∞ + = = − =
∑
where u(t) is the unit step function. Therefore, we obtain ( ) [ ( ) ( ) ] 0 ( ) , 1, 2. k m C k D k z h m m D h z e k ∞ + = = =
∑
It is obvious that the matrices Dm( )k can
be evaluated by comparing the coefficient of zm on both sides of the above equation. This procedure is outlined in [18], wherein the complete proof or reference is not given. We shall prove the procedure in a simple way and propose a method to tell when the procedure could be terminated. We drop the index k for both classes. Then can be written as [ ] 0 ( ) m C Dz h m m D h z e ∞ + = =
∑
As e[C Dz h+ ] is analytic, we utilize the decay proposition (Cauchy’s estimate) of complex variables as follows.
Proposition 1: Cauchy’s Estimate Let the matrix function
0
( ) m m
m
| |z < . Then for any R ρ such that 0 < ρ < R, one has |an|≤M( )ρ ρ−n,n=0,1, 2,3,…, where | | ( ) max | ( ) | z M a z ρ ρ =
= . More precisely, for
a given ε > 0 (in our context, ε is the machine precision of the floating point arithmetic) ∃N such that
1| i|
i N a
∞ = +
∑
has elements at most ε . In view of the Proposition 1 and Taylorseries, [ ] 0 ( ) m C Dz h m m D h z e ∞ + = =
∑
can be rewritten as 0 0 1 ( ) ( ) ( ) ! N m r m m r D h z R z A Bz r ε ∞ = = + = +∑
∑
where A = Ch, B = Dh and has coefficients with small moduli at most
ε . Hereafter, we drop the argument h in rest of the report for the sake of easiness.
From [ ] 0 ( ) m C Dz h m m D h z e ∞ + = =
∑
, for m=0, we have 0 1 ! r Ar D I r ∞ = = +∑
where I is the unit matrix of appropriate dimension. For m n. ≥1, let T(n;m) be the coefficient of zm−1 in (A+Bz)n , the nth term of the series on the right
hand side of [ ] 0 ( ) m C Dz h m m D h z e ∞ + = =
∑
, then we have (1,1) , (1, 2) , ( ,1) n T = A T =B T n =A ( , ) 0, 1, T n m = if m> +n and 2 1 ( ,1) ( , 2) ( , 3) ( , ) ( , 1) ( ) m n n T n T n z T n z T n m z T n n z A Bz − + + + + + + + = + … …Multiplying both sides by (A + Bz), we obtain 2 1 1 [ ( ,1) ( , 2) ( , 3) ( , ) ( , 1) ]( ) [ ] m n n T n T n z T n z T n m z T n n z A Bz A Bz − + + + + + + + + + = + … …
which could be re-written as
2 1 1 [ ( ,1) ( , 2) ( , 3) ( , ) ( , 1) ]( ) ( 1,1) ( 1, 2) ( 1, 2) . m n n T n T n z T n z T n m z T n n z A Bz T n T n T n n z − + + + + + + + + + = + + + + + + + … … …
Equating the coefficients of like powers of z, we obtain ( 1,1) ( ,1) , T n+ = T n A ( 1, 2) ( , 2) ( ,1) , T n+ = T n A T n+ B ( 1, ) ( , ) ( , 1) , T n q T n q A T n q B q + = + − ∈ Ν
For any positive integer m, D = m
coefficient of m z in ( ) ! m A Bz m + + coefficient of zm in 1 ( ) ( 1)! m A Bz m + + + + coefficient of z in m 2 ( ) ( 2)! m A Bz m + + + + … ,i.e., ( , 1) ! m T m m D m + = ( 1, 1) ( 2, 1) ( 1)! ( 2)! T m m T m m m m + + + + + + + + + … . Consequently, we obtain ( , 1) , 1, 2, , ! m k m T k m D for m N k ∞ = + =
∑
= …We then could compute the matrices
m
D s for both high priority and low priority packets. Though the above equation involves infinite number of
terms, due to the presence of k! in the denominator, only finite number of terms are required to compute the matrices D s . The procedure of m computing the matrices D s can be m terminated using Proposition 1. The procedure of computing the matrices
m
D s can be terminated using
Proposition 1. This is an alternative method to the method proposed in [10], [12], which works well too.
Now consider the embedded Markov chain {L Jn, n|n≥0} at the departure epochs of the queueing system
on the state space {( , , ) | 0 ,
S = b i j ≤ ≤b K 1≤ ≤i m1,
2
1≤ ≤j m }, where Ln denotes the buffer
occupancy and Jn denotes the phase of
superposed MAP. For the sake of convenience, a queueing system is said to be at level b, if its buffer occupancy is equal to b−1 (excluding the one at service). Under the operation of PBS mechanism with the level of threshold
, 0
K−d d ≥ , the embedded Markov chain has an irreducible transition probability matrix P that is given by
( 1 ) ( 1 ) 0 1 1 1 2 1 2 ( 1 ) ( 1 ) 0 1 1 1 2 1 2 ( 1 ) ( 1 ) 0 2 1 2 2 2 ( 1 ) ( 1 ) 3 2 1 2 3 2 ( ) ( ) ( ) ( ) 0 ( 1) 0 0 ( 2) 0 Kd Kd Kd K Kd Kd Kd K Kd Kd Kd K Kd Kd Kd K GD GD GD GC G D D G D D GE K D D D C D D D D E K D D C D D D D E K D C D D D D E K −− − −+ − − − −− − −+ − − − −− −− − − − − −− −− −− − − − ⊗ ⊗ ⊗ ⊗ ⊗ ⊗ − ⊗ ⊗ − … … … … … … … … ( 1 ) ( 1 ) 1 2 3 2 1 2 ( 1 ) ( 1 ) 0 1 2 2 2 ( 1 ) ( 1 ) ( 1 ) 0 2 1 2 1 2 ( 1 ) 0 2 , 0 ( 2) 0 0 ( 1) 0 0 0 ( ) 0 0 0 0 0 (1) d d d D C D D D D E d D C D D D D E d D D D D D D E d E D D − + − − − − − − − − ⊗ ⊗ + ⊗ ⊗ + ⊗ ⊗ ⊗ ⊗ ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ … … … … … … … … where (1) (2) ' ' ' 0 (2) 2 0 (1) ( ) 2 ' 0 ( ) 1 2 1 ( ), , ( ), ( ) , 1, 2, 3, , , ( ) , C C(1) (2), (1) (2), i i i i i i i i l l i l i i p D D D D D C D D E p D D p K G C D C D D D − = ∞ − = − − = − − − ⎧ = ⊗ ⎪ ⎪ = ⎪ ⎪ = ⊗ ⎪ ⎪ = ⊗ = ⎨ ⎪ = − ⎪ ⎪ = ⊗ ⎪ = ⊗ ⎪ ⎪⎩
∑
∑
∑
…In above, the matrix G consists of the conditional probabilities that system is idle. The fundamental arrival rate of
class k packets
is λ( )k =π( ) ( ) , 1, 2,k D k e k= where ( )k
π is the steady probability vector of C(k)+D(k). Then the traffic intensity is given asρ =(λ(1)+λ(2)) [E H t( )].
From the operation of PBS mechanism, it is clear that high priority packet loss occurs buffer is full, whereas low priority packet loss happens due to the buffer occupancy threshold. Then, by definition, the steady state high priority packet loss probability (Php) and the steady state low priority packet loss probability (Plp) are respectively given as
hp
P Mean of high priority packet loss
Mean of high priority packet arrival =
lp
P Mean of low priority packet loss
Mean of low priority packet arrival =
Firstly, the mean number of high priority and low priority packet arrivals are
(1)
[ ( )] E H t
λ and λ(2)E H t[ ( )] ,
respectively. Secondly, let
0 1 ( , , , K) y= y y … y , where 1 2 ,1,1 ,1,2 , , ( , , , ) k k k k m m y = y y … y , ∀k, is the
probability that departing packet leaves k packets in the system, i.e., yP = y, ye = 1. And then following [19], the mean of high priority packet loss and the mean of low priority packets loss are respectively given as follows: (1) 0 2 1 (1) 1 2 1 1 ( ) ( ) , K i i K k K k i k i iy G D D e iy D D e ∞ + − = ∞ − + + − = = ⊗ + ⊗
∑
∑ ∑
2 (1) (2) ( 1) 0 1 1 0 1 (1) (2) ( 2) (2) 1 1 1 1 0 (2) 1 ! 1 [ ] [ ] [ ] K d K d j K d j i i j K d K d k K d k k j K d k j i i k i j K k i k K d i D iy G D D D e iy D D D D e iy D D e − ∞ − − + − − + − = = − ∞ − − + − + + − − + − + − = = = ∞ − = − + = ⊗ ⊗ + + ⊗ + ⊗ + ⊗ ∑ ∑ ∑ ∑ ∑ ∑ ∑ where 1 (1) 0 i i D− =∑
∞= D . Thus we can calculate the steady state high priority packet loss probability, P , and the hp steady state low priority packet loss probability, P .lpNext, we proceed to calculate the mean lengths of critical and non-critical periods which are assumed to occur alternatively. Since the non-critical period is defined as the time period over which the number of packets in buffer (with buffer depth, K) is less than the threshold K−d, and the critical period is defined as the time period over which the number of packets in buffer is greater than or equal to the threshold
K−d, we could decompose the state space S into two subsets:
1 2 1 2 {( , , ) | 0 1,1 ,1 }, {( , , ) | ,1 ,1 }. nc c S b i j b K d i m j m S b i j K d b K i m j m = ≤ ≤ − − ≤ ≤ ≤ ≤ = − ≤ ≤ ≤ ≤ ≤ ≤
This partition of S makes the matrix P decomposed as follows: , , nc nc c c nc c P P P P P ⎡ ⎤ = ⎢ ⎥ ⎣ ⎦ where 0 1 2 1 0 1 2 1 0 3 2 4 3 0 1 0 0 0 0 0 K d K d K d K d K d K d nc K d K d GD GD GD GD D D D D D D D P D D D D − − − − − − − − − − − − − − − − ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ … … … … … , (1) (1) 1 2 1 2 (1) (1) 1 2 1 2 (1) (1) 1 2 2 2 , (1) (1) 2 1 2 3 2 (1) (1) 2 3 2 1 2 ( ) ( ) ( ) ( ) ( 1) ( 2) ( 2) K d K d K K d K d K K d K d K nc c K d K d K d GC G D D G D D GE K C D D D D E K C D D D D E K P C D D D D E K C D D D D E d − − + − − − − − + − − − − − − − − − − − − − − − − − + − ⎡ ⊗ ⊗ ⎤ ⎢ ⊗ ⊗ ⎥ ⎢ ⎥ ⎢ ⊗ ⊗ − = ⎢ ⊗ ⊗ − ⎢ ⎢ ⎢ ⎢ ⊗ ⊗ + ⎣ ⎦ … … … … … ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ , 0 , 0 0 0 0 0 0 0 , and 0 0 0 0 c nc D P ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ … … … (1) (1) 1 2 2 2 (1) (1) (1) 0 2 1 2 1 2 (1) 0 2 ( 1) ( ) 0 0 (1) d d c C D D D D E d D D D D D D E d P D D E − − − − − − − ⎡ ⊗ ⊗ + ⎤ ⎢ ⊗ ⊗ ⊗ ⎥ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ ⊗ ⎢ ⎥ ⎣ ⎦ … … …
The sub-matrices Pnc, Pnc;c, Pc;nc, and Pc
are the left upper part, right upper part, left lower part, and right lower part of the matrix P, that correspond to the transitions of those from Snc into itself,
from Snc into Sc, from Sc into Snc, and
from Sc into itself, respectively.
For the case of non-critical period, consider the transition probability matrix of absorbing Markov chain with transient states Snc and absorbing states
Sc, , , 0 nc nc c nc P P P I ⎡ ⎤ = ⎢ ⎥ ⎣ ⎦
where I and 0 are the unit matrix and zero matrix of appropriate dimensions. If Y is the random variable standing for the number of steps taken prior to
absorption, then the kth factorial moment of Y following from the probabilistic arguments is as follows [22], 1 [ ( 1) ( 1)] ! nck ( nc) k E Y Y Y k k βP − I P − e = − − + = − …
where β is the initial probability vector of transient states and is of the
form [0, 0,…, 0,βK d− −1]. This is followed from the fact that buffer occupancy starts at K− −d 1 in every non-critical period except the first one. The vector ¹0 is the zero vector of appropriate dimension. Similarly, for the case of critical period, consider the transition probability matrix of absorbing Markov chain that has transient states Sc and absorbing states
Snc, , 0 c nc c c I P P P ⎡ ⎤ = ⎢ ⎥ ⎣ ⎦
If Z is the random variable standing for the number of steps taken prior to absorption, then the kth factorial moment of Z is given by [22] 1 [ ( 1) ( 1)] ! ck ( c) k , E Z Z Z k k αP − I P − e = − − + = − …
where α is the initial probability vector of the transient states. Now the problem of finding the mean lengths of critical and non-critical periods are reduced to the problem of finding the initial probability vectors α and β , which can be computed as follows.
Consider the first absorbing Markov chain. Let rij be the probability
of being absorbed in the state ,i j∈ , Sc starting in transient state ,i j∈Snc . Then for each j∈Sc , we have the following relation nc ij ij is sj s S r q q r ∈ = +
∑
In the above relation, the first term corresponds to a transition from transient state to absorbing state directly, whereas the second term corresponds to the transitions from a transient state to other transient states and then to absorbing state. The above relation can be written in matrix form as follows:
, , nc nc c nc nc R =P +P R 1 , . ., nc ( nc) nc c. i e R = −I P − P
The matrix (I−Pnc)−1 is the fundamental matrix of the absorbing Markov chain under consideration. Rnc is
the transition matrix where the chain starts in transient states and ends up in an absorbing state. Similarly for the case of the second absorbing Markov chain, analogous to Rnc, we have the matrix Rc
that can be obtained as
1 ,
( ) ' ,
c c nc c
R = −I P − P
where P'nc c, is the last column of the
matrix Pc;nc and is equal to [D0, 0,…, 0].
The matrix P'nc c, is followed from the
suffices to attain the buffer K− −d 1 level rather than all other below levels, the level of buffer occupancy K− −d 1 is the starting point of non-critical period of each cycle except the first one. The matrix (I−Pc)−1 is the fundamental matrix of the second absorbing Markov chain. Since the critical and non-critical periods are assumed to occur alternatively, the initial distribution vector of transient states of one of the two aforementioned absorbing Markov chains would be the absorbing probability vector
of the other. Hence, we have
1 and .
K d Rc Rnc
β − − =α α β=
Taking the definition of β into account, the above equation can be written as
1 and 1 ' ,
K d Rc K d R nc
β − − =α α β= − −
where 'R nc is the product of the last
m1m2 rows of Rc = −(I Pnc)−1 and Pnc;c.
The two vectors βK d− −1 and α can be
computed by solving
1 and 1 ' ,
K d Rc K d R nc
β − − =α α β= − −
iteratively, on assigning arbitrary values
to either βK d− −1 or α first. Following the above discussions and the matrix analytic methods [12], [19], [22], [23], we could compute the following
performance measures:
1) Steady state packet loss probabilities, 2) Mean lengths of critical and non-critical periods.
These two performance measures characterize the long-time and the short-term loss behavior, respectively.
III Approximate Model for Low Priority Traffic
In this report, we further propose an approximate model for the performance analysis of OPS employing PBS mechanism under Markovian modeled self-similar traffic input. Our proposed model is to retain the same high dimensional MAP for high priority traffic, but to reduce the dimension of the resultant MAP of low priority traffic. Obviously, as the number of states of the resultant MAP of low priority traffic decreases, the computation complexity decreases cubically. However, we could not straightforwardly reduce the number of superposed MAPs in fitting the self-similarity for low priority traffic, since this will severely reduce the accuracy of the queueing based performance measures of the resultant MAP.
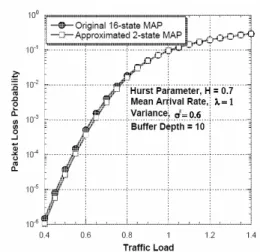
We have considered three self-similar traffic pertaining to H = 0.7, H = 0.8, and H = 0.9, all with the mean arrival rate, λ = 1, variance, σ2 = 0.6, over the time-scale range [10 ,10 ] .. 2 7 For each case, we have a 16-state MAP obtained by using the fitting method discussed in [9]. For all the cases,
correlation decay rate, ρ , squared coefficient of variation, c , the first 2 three moments, m1, m2, and m3, have been calculated. The correlation decay rate ρ is positive in each case, hence one could achieve the desired 2-state MAP with these high dimensional MAPs [24]. Moreover, all the cases satisfy the inequalities c2 > 1 and
2 3 1 3 3 ( 1) 2 m c
m > + which are the necessary conditions to be satisfied by the original distribution in order to have phase-type distribution by matching the first three moments [25]. Following [25], we could have phase type distribution, thereby the approximated 2-state MAP could be obtained.
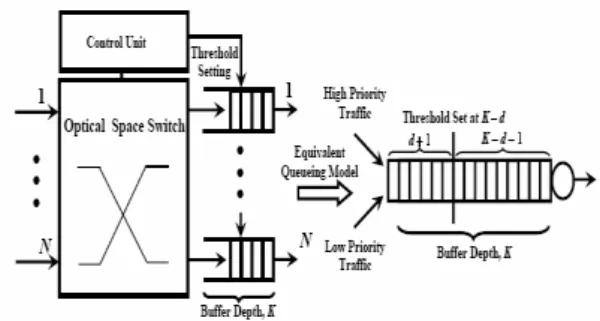
Table I lists the values of aforementioned traffic descriptors of the original 16-state MAPs, for which we follow the algorithms in [9] to fit a self-similar traffic with mean arrival rate,
λ = 1, variance, σ2
= 0.6, over the time-scale range [102; 107] in three
different traffic cases with Hurst parameters, H = 0.7, H = 0.8, and H = 0.9, and the corresponding ones of the approximated 2-state MAPs.
Table I: Statistics of Original MAPs and Approximated 2-State MAPs.
We illustrate the packet loss probability against the traffic load for the MAP/D/1/K queues under the inputs of the above two MAPs with traffic descriptors shown in Table I, when buffer depth equals 10 and H = 0.7 in Fig. 2. From Fig. 2, we observe how accurate the approximated 2-state MAP is. The figures in the cases of H = 0.8 and H = 0.9 could not be shown here. However, we do observe that the accuracy of the approximation becomes worse when H increases. By applying this approximate model, it is obvious that the computation complexity is reduced by 83 = 512 times.
Fig. 2. Packet loss probability against traffic load for the MAP/D/1/K queues under the inputs of the two MAPs with traffic descriptors as shown in Table I, at buffer depth equals 10 and H = 0.7.
IV Simulation Results
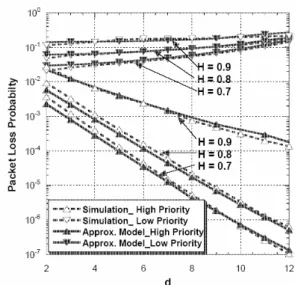
We first validate the approximate model by illustrating the comparisons of long term steady state packet loss probabilities against the variable of threshold level, d, at traffic load, L = 0.85, and buffer depth, K = 15, between the analytical results of the approximate model and the simulation results without approximation in Fig. 3. The parameters of the high priority and low priority MAP traffic are the same ones as we shown in Table I.
Fig. 4 depicts the mean lengths of the critical and non-critical periods against the threshold level variable, d, for H = 0.7, 0.8, and 0.9. Fig. 5 illustrates the mean lengths of the critical and non-critical periods against the threshold variable, d, when H = 0.8, over 2 different buffer depths. Fig. 6 depicts the mean lengths of the critical
and non-critical periods against the traffic load, when K = 15, d = 9, and H = 0.8. In these figures, the unit time means one unit of the average service time.
From these results, we observe that (1) as d increases, the mean length of non-critical period decreases while the average length of critical period seems to increase slowly (this observation is consistent with the results found in [19], [27], [28]); (2) both the mean lengths of critical and non-critical periods increase, as the buffer depth increases; (3) the mean length of non-critical period decreases drastically as traffic load increases whereas the mean length of critical period increases moderately as traffic load increases; (4) the higher the Hurst parameter is, the lower the mean length of non-critical period is; while the mean length of critical period increases as Hurst parameter increases.
From the information of the mean lengths of critical and non-critical periods, it is very likely that we could adopt these measures as a trigger event of initializing call admission control scheme in OPS to improve the switching performance to greater extent.
Fig.3 The steady state packet loss probabilities against the variable of threshold level, d, at traffic load L = 0.85 at various H.
Fig. 4 The mean lengths of critical and non-critical periods against the threshold variable, d, at buffer depth K = 15, traffic load L = 0.85, and over three different Hurst parameters.
Fig. 5 The mean lengths of critical and non-critical periods against the threshold variable, d, at L = 0.85, H = 0.8, and over two different buffer depths.
Fig. 6 The mean lengths of critical and non-critical periods against the threshold variable, d, at K = 15, d = 9, and H = 0.8.
(2) WDM Optical Packet Switches Employing Wavelength Conversion in Conjunction with Markovian Modeled Self-Similar Traffic Input
I Queueing Model and Related Formulae
The architecture of WDM OPS employing wavelength conversion techniques implemented in a broadcast-and-select architecture is shown in Fig. 7(a), in which, there are N input ports and N output ports, and each port has n wavelength channels,
1, 2, , n
λ λ … λ in it. B FDLs constitute the optical buffers with buffer depth (B− ). 1 For the sake of simplicity, we assume that the packet length is fixed and constant, and that the packet length is equal to h units when it is measured in time. Further, we assume that the WDM OPS is operating at a synchronous mode with delay time unit, T, for the FDLs of optical buffers, where the suitable value of delay time unit, T, is chosen to be h, the packet length measured in time. No specific scheduling algorithm is applied, only the service discipline of first-come-first-serve (FCFS) is adopted. Hence, the queueing model of a specific output port of such OPS is equivalent to the one of a multiplexer. When the wavelength conversion is employed, the equivalent queueing model is shown in Fig. 7(b). When the traffic aggregated at the input end of the optical buffers of one of the specific output ports is MAP modeled self-similar processes, then, the
final queueing model is a MAP/D/c/K queueing system as shown in Fig. 7(c). As illustrated in Fig. 7(c), the number of wavelength channels per port, n, is equal to the number of servers, c, and the total effective buffer size of optical buffers, (B− )n as shown in Fig. 7(b), is equal 1 to the buffer depth of the MAP/D/c/K queue, K−c. Therefore, the problem of analyzing WDM OPS employing wavelength conversion techniques is equivalent to solving the MAP/D/c/K queueing systems with the parameters mentioned above.
Fig. 7 (a) A block diagram of WDM OPS implemented in broadcast-and-select architecture; (b) the equivalent queueing model of a specific output port of WDM OPS employing wave- length conversion; (c) the final equivalent
MAP/D/c/K queue.
Let H(t) be the generally and identically distributed service time. Let
( ), 0
n
whose ( , )i j th element represents the conditional probability that n customers arrive at the system during service time and the underlying Markov chain is in phase j at the end of service given that the underlying Markov chain is in phase i at the beginning of the service. Then
( )
n
A t satisfies the following equation
[ ] 0 0 ( ) n t C Dz ( ). n n A t z e τdH τ ∞ + = =
∑
∫
When the service time is deterministic and is h units/packet, then the above formula is reduced to [ ] 0 0 1 ( ) [ ] , ! n C Dz h r n n r A t z e A Bz r ∞ ∞ + = = = = +
∑
∑
where A = Ch, B = Dh.It is obvious that the matrices A s n of counting function can be obtained by comparing the coefficients of z on n both sides of the above equation. A procedure to calculate the matrices of counting functions [19] is briefed as follows. Hereafter, for the sake of easiness, we drop the argument h in rest of the report. For n = 0, the above formula will be 0 1 , ! r r A A I r ∞ = = +
∑
where I is the unit matrix of appropriate dimension. And the rest of A s can be n obtained as follows. ( , 1) , 1, 2, , ! n k n T k n A for n N k ∞ = + =
∑
= …where ( , )T i j can be calculated using the recurrence formulae as follows
( 1, ) ( , ) ( , 1) , T i+ j =T i j A T i j+ − B j∈ N Though A involves infinite number of n terms, due to the presence of k! in the
denominator, only finite number of terms are required to compute the matrices A s . The procedure of n computing the matrices A s can be n terminated using Cauchy estimate as shown in the Proposition 1 to avoid lots of computation efforts.
Next, we consider the embedded Markov chain { ( ), ( )}, L n J n n≥ , at 0 the departures of the queueing system on
the state space {0,1, 2,…,K− ×c} {1, 2,…, }m , where
L(n) and J(n) denote the buffer occupancy and the state of MAP, respectively. At the steady state, the transition probability matrix corresponding to the departure points, P
(with the dimension (K− +c 1)m×(K− +c 1)m ), is as follows: 0 1 2 1 0 1 2 1 0 1 2 1 0 1 2 1 0 2 1 2 1 0 1 . 0 0 0 K c K c K c K c K c K c K c K c K c K c K c K c K c K c K c c c A A A A B A A A A B A A A A B P A A A A B A A A B A A B − − − − − − − − − − − − − − − − − − − − − − − ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ … … … … … … … … … … … …
In the matrix, P, elements of the first (c + 1) rows are identical and
n i n i
B =
∑
∞= A denote the probability that there are at least n arrivals. A s are n computed following the algorithm in the aforementioned procedure. Next, let xk, 0≤ ≤ −k K c , denote a 1 m× vector whose ith element represents thesteady state probability that the number of packets in the system at departures is k and the phase of the arrival process is i. At the steady state, we could find the vector { }x= x , according to the steady k state equations xP = x, xe = 1.
Although the general relationship between the probability generating function of queue length at arbitrary time points and at departure points holds good [33] in the case of multiple server queues with finite buffer, the nature of multi-server makes it hard to establish an explicit formula for packet loss probability unlike the single server case in conventional researches [8]. Instead, we compute the loss probability using the steady state probability vector at departure epochs owing to fact that packet loss is due to buffer overflow.
Let PL denote the number of packets lost due to the fact that buffer is full. Then the expected value of PL is given as 0 1 [ ] K c i K i j i j E PL j A − ∞ − + = = =
∑∑
x eby considering the last column of the (K− + ×c 1) (K− + block transition c 1) probability matrix P. Then the packet loss probability, PLP, can be obtained by [ ] [ ( )] E PL PLP E H t λ =
where ¸ λ E[H(t)] is the number of packet arrivals during the mean service time.
II Steady state Probability Vector
From the above subsection it is
clear that problem of finding packet loss probability is reduced to the problem of finding steady state vector. It is worthwhile and interesting to investigate the required computation complexity of calculating the steady state probability vector. To the best of our knowledge, this analysis of the computation complexity pertaining to the MAP/D/c/K queueing systems is not available yet and is useful in deciding the necessary platform for analyzing WDM OPS employing wavelength conversion under Markovian modeled self-similar traffic input.
First, we shall present a method to compute the steady state probability vector, and then we derive the computation complexity of the same as follows. The matrix P is not of the canonical M/G/1 type. However, it is possible to exploit Schur-Banachiewicz inversion formula to P, which has been used to compute the steady state probability vector when P is in canonical form [12]. Accordingly, the steady state probability vector x is given by x = [0, 0,…, 0,1](I−P1)−1, where I is the unit matrix of appropriate dimension and P is the matrix P in which the last 1 column is replaced by [ 1, 1,− − …, 1, 0]− T. Let [EK c− ,EK c− ,…,EK c− ,EK c− −1,…,Ec]T
be the last column of P . Multiplying 1 the permutation matrix S by (I−P1), we have
1 0 1 2 1 0 2 1 2 1 0 1 0 1 2 1 0 1 2 1 0 1 2 1 ( ) 0 0 0 , K c K c K c K c K c K c c c K c K c K c K c K c K c K c K c K c S I P A A A A E A A A E A A I E I A A A A E A I A A A E A A I A A E − − − − − + − − − − − − − − − − − − − − − − − − = − − − − − ⎡ ⎤ ⎢ − − − ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ − − − ⎥ ⎢ ⎥ ⎢ − − − − ⎥ ⎢ ⎥ − − − − − ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ − − − − ⎢ ⎥ ⎣ ⎦ … … … … … … … … … … … … where 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 I . 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 I I S I I I ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ … … … … … … … … … … … …
Note that in the the first row of S, I is placed in the (c + 1)th column.
The matrix S I( −P1) can be represented by the following form:
1 ( ) . S I−P = ⎢⎡ ⎤⎥ ⎣ ⎦ A B C D Dimensions of A, B, C, and D are (K- 2c+1)m×(K- 2c+1) , (K- 2c+1)m cm× , (cm× K- 2c+1) ,
and cm cm× , respectively. Using the
Schur-Banachiewicz formula for the inverse of block matrices, we could obtain 1 1 ( ) S I−P − = ⎢⎡ ⎤⎥ ⎣ ⎦ -1 -1 -1 -1 -1 A + EΔ F -EΔ Δ F Δ where Δ D - CA B= -1 , Schur complement of A , E = A B , and -1 = -1 F CA . Since (I−P1)−1=[ (S I−P1)]−1S , steady state probability vector is the last
row of the matrix (Δ - Δ - F) . The -1 -1 matrix Δ is non-singular, if A is non-singular. The matrix A is upper-triangular Toeplitz matrix whose inverse is easy to compute. The computation complexity to compute its inverse is of the order O K(( −2 )c m2 3). The computation complexity to compute
F is of the order 2 3
( ( 2 ) )
O c K − c m . The computation complexities to compute FB and Δ F is of the order -1
2 3
( ( 2 ) )
O c K− c m . Therefore, the overall complexity to compute the steady state vector is of the order
2 2 3
(max[ ( 2 ) , ( 2 )] )
O c K− c c K− c m .
III Simulation Results
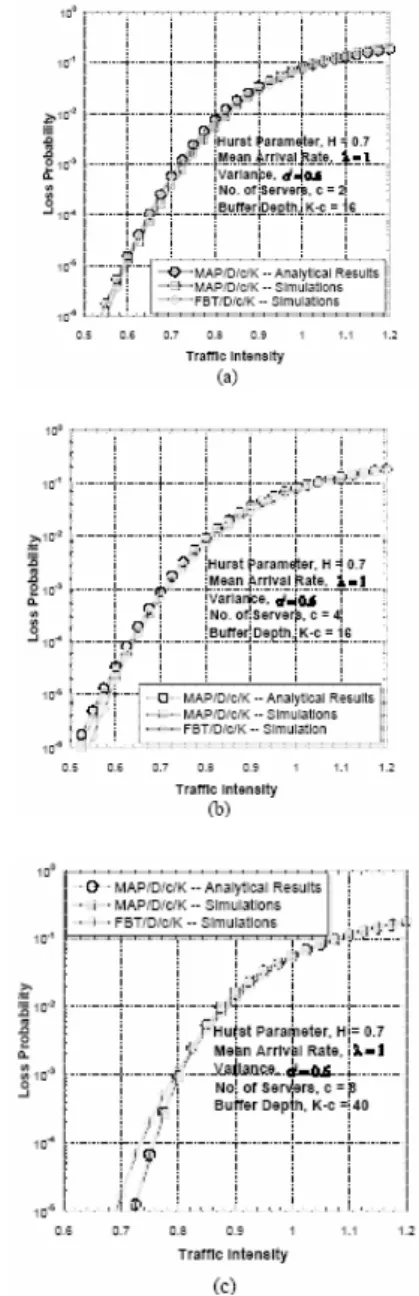
We first illustrate the loss probabilities against the traffic intensity pertaining to the analytical and the simulation results of MAP/D/c/K queues and the simulation ones of the same queues under the fractional Brownian traffic (FBT) input in Figs. 8(a)-9(c). The MAP shown in Figs. 8(a)-9(c) is obtained by fitting the FBT traffic with mean arrival rate λ = 1, variance σ2 = 0.6, and Hurst parameter H = 0.7 over a typical time-scale [10 ,10 ] 2 7 following the method proposed in [9]. From these figures, we observe that our analysis is pretty accurate.
By showing the accuracy of our analysis, we then analyze the performance of WDM OPS employing wavelength conversion under Markovian modeled self-similar traffic input, according to the related system
parameters and traffic descriptors in Figs. 9(a)-11.
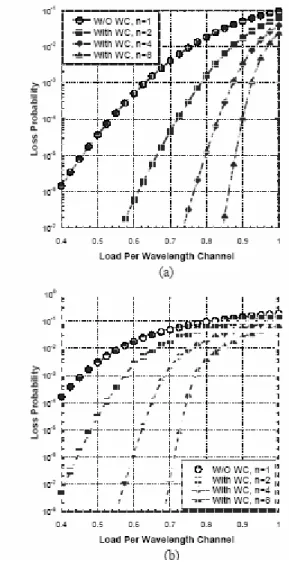
Figs. 9(a) and 9(b) illustrate the comparisons of packet loss probability against the load per wavelength channel at the number of FDLs, B = 10, Hurst parameters, H = 0.7 and H = 0.9, respectively. The MAP input is obtained by emulating self-similar traffic with
λ = 1 and σ2
= 0.6 in each case. From these results, the benefit of adopting wavelength conversion is apparent when the load is moderate, i.e., employing more number of tunable wavelength channels leads to better performance. When the load is high, the advantage of employing wavelength conversion is limited.
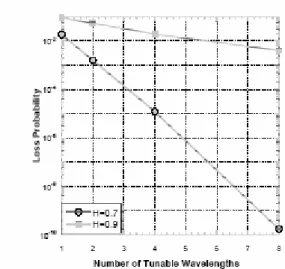
Figs. 10(a) and 10 (b) depict the comparisons of packet loss probability against the number of FDLs. The input traffic is the same as the ones in Figs. 10 (a) and 10 (b) with load set to 0.8. From these results, we observe that when H increases, the benefit of wavelength conversion becomes less prominent. We also observe that increasing the number of FDLs has limited improvement on performance. This coincides with the impact of self-similar traffic upon the storage models [34] Fig. 11 shows the comparisons of packet loss probability against the number of tunable wavelength channels when B = 10 and load per wavelength channel is 0.8 in both H = 0.7 and H = 0.9 cases. From Fig. 11, we observe that the benefit of wavelength conversion is remarkable
when the input traffic is moderate self-similar. However, this benefit decreases drastically when H increases. This is the same as the conclusions shown in [35] by simulations.
Fig. 8 Comparisons of loss probability against traffic intensity between the analytical and simulation results of MAP/D/c/K queues and the simulation ones of the same queues under FBT input, (a) c = 2 and K = 18; (b) c = 4 and K = 20; (c) c = 8 and K = 48.
Fig. 9 Packet loss probability versus channel load for a OPS with FDLs = 10, (a) H = 0.7; (b)
H = 0.9.
Fig. 10 (a) Packet loss probability versus the number of FDLs for various tunable wavelengths when the load per wavelength channel is 0.8 and H = 0:9; (b) packet loss probability versus the number of FDLs for various Hurst parameters at load per wavelength channel is 0.8 and number of tunable wavelengths is 2.
Fig. 11 Packet loss probability versus the number of tunable wavelengths for input traffic when the number of FDLs is set to be 10 and the load per wavelength is 0.8 at H = 0.7 and H = 0.9.
(3) Noncoherent Spatial/Spectral Optical CDMA System With Two-Dimensional Perfect Difference Codes
Ⅰ Introduction
Because the demand of bandwidth increases rapidly, the access network becomes the bottle neck of the internet. PON has many advantages, currently most of PONs employ Time Division Multiple Access (TDMA) techniques. However, OCDMA has many benefits such as security, flexible transmission and no need for high speed electronics devices. OCDMA has attracted a lot of attention. OCDMA PON is a promising candidates for broadband access network applications. Because of non-negative power for amplitude modulation/direct detect optical signals,
optical orthogonal codes (OOCs) are a family of (0, 1) sequences with good autocorrelation and cross correlation properties. (n,w,λa,λc) – OOCs denotes
the OOCs with code length n , code weightw, autocorrelationλa and cross
correlationλc. Forλa =λc =λ, we may
simply the notation as (n, w,λ) – OOCs. The code sizeΦ is given by [36]
⎥ ⎦ ⎥ ⎢ ⎣ ⎢ ⎥⎦ ⎥ ⎢⎣ ⎢ − − ⎥⎦ ⎥ ⎢⎣ ⎢ − − ≤ Φ ... ... 1 1 1 λ λ w n w n w
By relaxing the cross correlation constrain, the code size of (n, w,1,2) - OOCs is about 10 times larger than that of (n, w,1) – OOCs [37]. However the bit error rate (BER) performance of the later is better than that of the former. The one-dimensional ( n,w,λa,λc ) –
OOCs, which speads the input data bits in time domain, have been studied intensively. Recently the 2-D spectral/time OOCs were proposed [42]. The 2-D spectral/time OOCs can support a large number of users. The 2-D OOCs can be considered as an mxn matrix with (0, 1) elements. An example of 2-D OOCs is shown in Fig. 12 [42].
Fig. 12 An example of two (3×21, 4, 1, 1)-MWOOCs
For any codeword X= {X } of the ij
(mxn,w,λa,λc) – OOCs. The periodic autocorrelation λa satisfies a m i n j f ij ijX X λ
∑∑
− = − = ⊕ ≤ 1 1 1 0where f is the asynchronous time shift and ⊕ represents the modulo- n
addition.
For any code words X= {X } and Y= ij
{Y }, the periodic cross correlation ij
c λ satisfies. c m i n j f iy ijY X λ
∑∑
− = − = ⊕ ≤ 1 1 1 0The mxn of many 2-D OOCs are constrained by certain relations [42]. The 2-D OOCs with arbitrary combination of m and n are proposed [43], where m≤ n, we have applied the proposed 2-D OOCs to the spectral/time OCDMA systems.
Another type of 2-D OCDMA systems employ multi-fibers. Therefore
the data bits are spread in the time domain and spatial domain. The partial modified prime (PMP) codes are applied in the system. Because the system can suppress the phase-induced intensity noise (PIIN), it also has very good performance [44].
Ⅱ The 2-D spectral/time OCDMA
system
The receiver structure of the 2-D spectral/time OCDMA system using Pd codes is shown in Fig. 13 [43]. We assume the system is chip synchronous among users since it is the worst case of the performance. The average photon arrival rateΣ per pulse is given by
hf pw
η
=
Σ whereη is the APD quantum efficiency,
w
p is the received optical signal power,
h is the plauck’s constant, and f is the optical frequency. The optical signal at the output of the second hard limiter has “on” and “off” two level which are denoted by state S1andS . The photon 0
arrival rates for state S1andS are 0
Σ and zero. With the Gaussian probability density function (pdf) assumption, the output current ϕb of
the photo detector is given by [45]
2 2 2 2 ) ( 2 1 ) ( b b b e P b σ μ ϕ πσ ϕ ϕ = − −
where bE{0, 1} for state ωb, μb is the
mean value of the detector output current given by
e I T e I b GTc b c s b = ( ε + / )+ / μ have G is the average APD gain, T is c
the chip time, e is the electron charge,
b
I and I are the bulk and surface c
leakage currents of the APD.
Fig. 13 The receiver structure of asynchronous OCDMA systems using double optical hard limiters
The variance of the photo current,
2 b σ is expressed as e I T e I b T F G e c b c s b ( / ) / 2 2 = ε + + σ ) 1 )( / 1 2 ( eff eff e k G G k T = + − −
here keff is the APD effective
ionization ratio. The variance of thermal noise is given by L c r b b K TT e R 2 2 / 2 = σ
Where KB is the Boltzmann’s constant,
r
T and RL are the receiver noise temperature and load resistance. The threshold is set at 2 1 0 1 1 0 σ σ σ μ σ μ θ + + =
The probabilities that the desired signal
bit by the interfering user at one work and λc works are q1 and qλ which
are given by mn w q c 2 2 1 λ − = and mn q c 2 1 = λ
The number of code weights interfered by α interfering users can be modeled by the Markov chain [46]. The state transition occurs, when a new interfering user appears. The transition probability
ij P is ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎩ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎨ ⎧ + = ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − + = ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − + − = ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + + otherwise 0 if 1 if 1 1 if 1 1 0 c c c c c c ij i j w i w q i j w i w i q w i w q i j w w i q w i q q P c λ λ σ λ λ λ λ λ λ where c q q q0 =1− 1− λ Let ]K(α) =[K0(α)K1(α)... Kw(α) represent the state probability of the Markov chain given α [44]. Let Pdemote the state transition matrix where P={Pij} for
w j i ≤ ≤ ,
P K
K(α) = (α−1) , where K(0) is the initial state and is given by
0] ... , 0 , 1 [ ) 0 ( = K [44]. Because the
second can completely remove the multiuser interference (MUI) when data bit “i ” is transmitted. If “o” is sent, the second limiter can not entirely remove the MUI if the number of interfering marks exceeds or equal tow. When the simultaneously users are N, the probability of error is expressed as
1 1 ) 0 | ( − = = = N w r e K b S P P
The total BER is given by
) 0 | ( )) 2 ( 1 ( 2 1 ) 2 ( 2 1 ) 0 | ( ) 2 ( 2 1 1 2 1 1 2 1 1 0 2 0 0 = − − + − + = − = b S P erfc erfc b S P erfc BER r r σ θ μ σ θ μ σ μ θ where )Pr(S0|b=0)=1−Pr(S1|b=0 [44].
Ⅲ The 2-Dspectral/spatial OCDM
system
Ⅲ-1 System Architecture
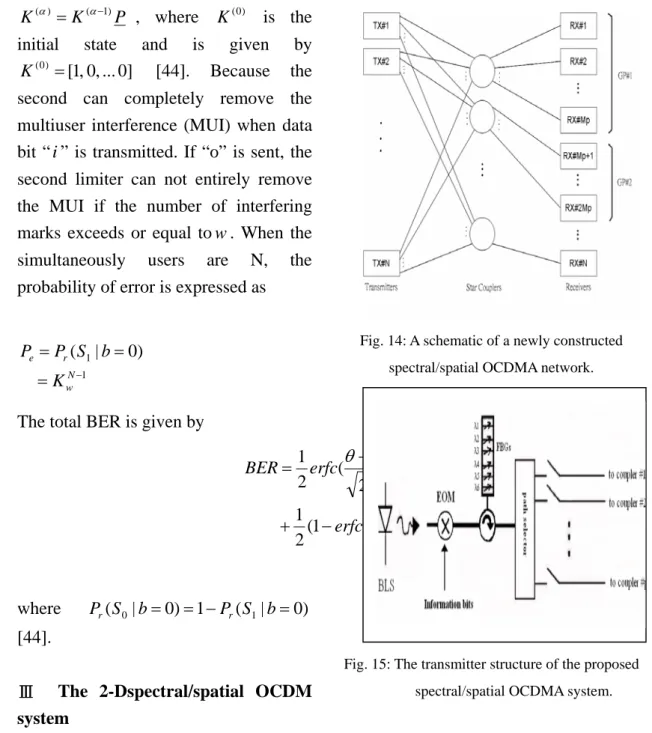
The proposed system Architecture is shown in Fig 14. The structures of the transmitter and receiver are depicted in Figs 15 and 16 [43].
Fig. 14: A schematic of a newly constructed spectral/spatial OCDMA network.
Fig. 15: The transmitter structure of the proposed spectral/spatial OCDMA system.
Fig. 16: The receiver structure of the proposed spectral/spatial OCDMA system.
The transmitter has a broadband light source (BLS), an electro-optic modulator (EOM), a spectral encoder composed of a set of fiber Bragg gratings (FBGs), and a path selector. Therein, the EOM is used to perform the ON-OFF keying scheme to convert the incoming information bits into an optical broadband pulse stream. The spectral encoder is used to encode the broadband pulse stream spectrally according to the assigned code sequence of the PMP codes. The path selector is used to choose a signal transmission path according to the code group of the assigned code sequence [43].
If the information bit inputted into the EOM is “1”, the EMO will provide an optical broadband pulse for the spectral encoder. Otherwise, no optical pulse will be provided. When an optical broadband pulse is inputted into the spectral encoder, the spectral components corresponding to the assigned code sequence are reflected back and the other unwanted spectral components are filtered out. After that, the reflected spectral components, i.e. the spectrally encoded signals, are delivered to the path selector, which will select an optical fiber connected to the star coupler corresponding to the code group of the assigned code sequence and then pass the encoded signals via the selected optical fiber.
As shown in Fig. 14, the receiver structure has a spectral decoder
composed of a set of FBGs and a photodiode. Therein, the spectral decoder is used to decode the received optical signals in the spectral domain according to an assigned code sequence of the PMP codes and the photodiode is used to convert the decoded optical signals into electrical ones. It should be noted that the grating arrangement of the spectral decoder is contrary to that of the spectral encoder to compensate the round-trip delays of different spectral components. When the encoded optical signals are passed into the spectral decoder, the spectral components corresponding to the assigned code sequence are reflected back and the other unwanted spectral components are filtered out. Then, the reflected optical signals, i.e. the spectrally decoded signals, are passed to the photodiode for electro-optic conversion to recover the original information bit stream.
According to the 2-D OCDAM network architecture shown in Fig. 14, a receiver is only connected to a start coupler corresponding to the code group of the assigned PMP code sequence via an optical fiber. An example of the PMP Codes for GF(5) and M=2 is listed in TableII. Hence, the receiver can only receive the optical signals encoded according to the PMP code sequences belonging to the same code group. As mentioned above, the PMP code sequences of the same code group are mutually orthogonal. Hence, the spectral decoder of the receiver can completely
filter out the undesired optical signals sent from other users and thus eliminate MUI. Moreover, since no undesired optical signal sent from other users can be delivered to the photodiode of the receiver, the PIIN is suppressed greatly. Ⅲ-2 Performance Analysis
In order to simplify the analysis, some assumptions are given as follows [48-50]:
1) The broadband light source is ideally unpolarized and has a flat spectrum over [fc-Δf/2, fc+Δf/2], where fc is the
central frequency and Δf is the bandwidth of the light source;
2) Each spectral slice of the encoded signals has identical bandwidth;
3) Each user has equal transmission power at the receiver; and
4) Bit streams sent from different users reach the receiver synchronously.
In the following analysis, the intensity noise, the shot noise, and thermal noise are considered. The effect of receiver’s dark current is neglected. In general, the photocurrent noise that occurs during the detection of thermal light, which is produced by a broadband light source, can be expressed as [48] 2 2 2 2 2 2 4 / in c e in b n L i G P R B e G F P R B K T B R τ = + + ,
where G and Fe are average gain and
excess noise factor of an avalanche photodiode (APD), e is the electron’s charge, B is the noise-equivalent electrical bandwidth of the receiver, τc is
the coherence time of the light source, Kb is the Boltzmann’s constant, Tn is the
absolute receiver noise temperature, RL
is the receiver load resistance, Pin is the
optical power incident on the APD, and R is the responsivity of the APD.
Therein, R is given by R=ηe/hfc,
where η is the quantum efficiency of the APD and h is the Planck’s constant. Pin
can be expressed as
∫
∞=
0 S( dff)
Pin ,
where S(f) is the single sideband power spectral density of the broadband light source. The excess noise factor, F , can e be written as ) 2 )( 1 ( − − −1 + =k G k G Fe e e ,
where k is the effective ionization e ratio of the APD. In (16), the items at right hand side result from the PIIN, shot noise, and thermal noise, respectively. Note that the coherence time can be expressed as [44]
( )
( )
2 0 0 2 ⎥⎦ ⎤ ⎢⎣ ⎡ =∫
∫
∞ ∞ df f S df f S c τ .If the power loss caused by the optical fibers used for signal transmission is ignored, the power spectral density (PSD) of the received optical signal of the h-th receiver can be written as
( )
b C( ) ( )
iF i f f P Mp f R K k L i k k s h , 1 1 1∑ ∑
= = Δ = ,where Ps is the output power of a
broadband light source, K is the number of simultaneous users in the system, bk is
a data bit sent from the k-th user and can be 1 or 0, p is a prime number used in the PMP codes, L is the code length of the PMP codes, Ck(i) denotes the i-th
element of the k-th PMP code sequence, F( i, f ) represents the i-th slice of the spectrum used in signal transmission and can be expressed as ( ) ( ) ( ) ⎭ ⎬ ⎫ ⎩ ⎨ ⎧ ⎥⎦ ⎤ ⎢⎣ ⎡ − −Δ − + − ⎥⎦ ⎤ ⎢⎣ ⎡ − −Δ − + − = L i L f f f u i L L f f f u f i F 2 2 2 2 2 , 0 0
where u( f ) is the unit step function, defined as
( )
⎩ ⎨ ⎧ < ≥ = 0 , 0 0 , 1 f f f u .After being received, the optical signals are decoded by the spectral decoder of the h-th receiver. The transfer function of the spectral decoder of the h-th receiver can be written as
( )
∑
( ) ( ) = = L i h h f C iF i f H 1 , ,where Ch(i) denotes the i-th element of
the h-th PMP code sequence. Thus, the PSD of the decoded optical signals incident on the photo-detector of the h-th receiver can be written as
( )f R ( ) ( )f H f Gh = h h ( ) ( ) ( )iC f F i f C b f P Mp K k L i h k k s , 1 1 1
∑ ∑
= = Δ = ,Due to the orthogonal property,
( )
h G f can be rewritten as ( )∑
( ) ( ) = Δ = L i h h s h b C i F i f f P Mp f G 1 , 1 ( ) ( ) ( )∑
= ⎪ ⎪ ⎭ ⎪⎪ ⎬ ⎫ ⎪ ⎪ ⎩ ⎪⎪ ⎨ ⎧ ⎥⎦ ⎤ ⎢⎣ ⎡ − −Δ − + − ⎥⎦ ⎤ ⎢⎣ ⎡ − −Δ − + − Δ = L i h h s i L L f f f u i L L f f f u i C b f P Mp 1 0 0 2 2 2 2 2 1 .Therefore, the optical power incident on the APD is
( )
∫
∞ = 0 G f df Pin h ( ) ( ) ( )∫ ∑
∞ = ⎪ ⎪ ⎭ ⎪⎪ ⎬ ⎫ ⎪ ⎪ ⎩ ⎪⎪ ⎨ ⎧ ⎥⎦ ⎤ ⎢⎣ ⎡ Δ − + − − − ⎥⎦ ⎤ ⎢⎣ ⎡ Δ − + − − − Δ = 0 1 0 0 2 2 2 2 2 1 df i L L f f f u i L L f f f u i C b f P Mp L i h h s ( ) h s b pL M p P 2 1 − = .Since the code length L is equal to p2, we have
(
)
h s in b p M p P P = 2−31 .Finally, the photocurrent can be expressed as
(
)
2 3 1 s h in h GRP p I GRP b M p − = = .And the PIIN can be expressed as
c in
PIIN G P R B
i 2 = 2 2 2 τ
By substituting these above equations, the PIIN can be rewritten as
![Table I lists the values of aforementioned traffic descriptors of the original 16-state MAPs, for which we follow the algorithms in [9] to fit a self-similar traffic with mean arrival rate, λ = 1, variance, σ 2 = 0.6, over the time-scale range [10](https://thumb-ap.123doks.com/thumbv2/9libinfo/8838801.238242/11.892.465.756.113.396/aforementioned-descriptors-original-algorithms-similar-traffic-arrival-variance.webp)