行政院國家科學委員會
獎勵人文與社會科學領域博士候選人撰寫博士論文
成果報告
A study of the economic efficiencies in East
European countries using semiparametric approaches
核 定 編 號 : NSC 98-2420-H-004-174-DR 獎 勵 期 間 : 98 年 08 月 01 日至 99 年 07 月 31 日 執 行 單 位 : 國立政治大學金融研究所 指 導 教 授 : 黃台心 博 士 生 : 陳冠臻 公 開 資 訊 : 本計畫涉及專利或其他智慧財產權,2 年後可公開查詢
中 華 民 國 100 年 07 月 21 日
國 立 政 治 大 學 金 融 系
博 士 論 文
指導教授:黃 台 心 博士
探討半參數隨機邊界模型的技術與配置效率之
一致性估計方法
研究生:陳冠臻
中華民國九十九年六月十日
探討半參數隨機邊界模型的技術與配置效率之
一致性估計方法
摘要
傳統參數隨機成本邊界模型需事先假設其函數型態,但真正的函數型態未 知,若是假設錯誤的函數型態可能存在模型設定誤差,另外過去估計成本函數 時,大多著重於技術效率的衡量,而忽略配置效率,如此一來,將導致模型參數 估計產生偏誤,影響後來效率的計算。基於上述的問題,本研究將應用半參數隨 機成本邊界模型且同時考量技術效率與配置效率,不但函數設定具有彈性且能正 確的衡量效率值,然而在考量配置效率的衡量後,增加模型估計的困難度,使得 估計收斂不易,因此本研究提出一個五階段的估計步驟,應用蒙地卡羅模擬進行 分析,該估計步驟不但能簡化估計且能得到技術與配置效率的一致性估計。最後 則將本研究提出的估計方法應用在實證研究上,探討 14 個東歐國家在轉型期間 其技術與配置效率的衡量,使用不平衡縱橫資料,共 340 家商業銀行進行實證分 析。 關鍵字: 半參數成本邊界、核估計式、影子價格、技術效率、配置效率Consistent Estimation of Technical and Allocative Efficiencies for a
Semiparametric Stochastic Cost Frontier with Shadow Input Prices
Abstract
Conventional parametric stochastic cost frontier models are likely to suffer from biased inferences due to misspecification and the ignorance of allocative efficiency (AE). To fill up the gap in the literature, this article proposes a semiparametric stochastic cost frontier with shadow input prices that combines a parametric portion with a nonparametric portion and that allows for the presence of both technical efficiency (TE) and AE. The introduction of AE and the nonparametric function into the cost function complicates substantially the estimation procedure. We develop a new estimation procedure that leads to consistent estimators and valid TE and AE measures, which are proved by conducting Monte Carlo simulations. An empirical study using unbalanced panel data on 340 commercial banks from 14 East European countries over the period 1993-2004 is performed to help shed some light on the usefulness of our procedure.
Keywords: semiparametric cost frontier; kernel estimation; shadow prices; technical
Acknowledgements
I would like to acknowledge an impressive Professor, Tai-Hsin Huang, who is my Ph.D. dissertation advisor and have assisted me in researching and writing of this thesis. I really appreciate his patience and insightful opinions and suggestions. He has been very helpful when I encountered some difficulties during the period of the research. Professor Huang is not only a pioneer in the field of bank efficiency but also one of the most influential scholars in this aspect of research. He is a role model to me in many ways. I have learned, and continue to learn, vastly from him. I further thank the oral committee members, Professor Tsu-Tan, Fu, Academia Sinica; Professor Jong-Rong Chen, National Central University; Professor Biing-Shen Kuo, National ChengChi University (NCCU); Professor Tung-Hao, Lee, NCCU, for thoroughly commenting on the entire manuscript. Their valuable constructive criticisms and suggestions greatly improved every part of this thesis. Now this thesis is much better thanks to their contributions.
I gratefully acknowledge the financial support of the National Science Council. This support allowed me to take time off from my teaching to complete this thesis. I also thank the department of Money and Banking at NCCU for the academic atmosphere and research environment. I would also like to thank my friends, Min-Chieh Chuang, Yu-Fang, Chiu and Yu-Ching Li for their kindness, generosity and assistance. Special intellectual and personal indebtedness goes to Chun-Pei, Lin, a colleague and friend, for encouragement and long time company. I would not have completed the thesis without his support. I am enormously gratefully to all of these persons for accompanying me in these years at NCCU.
My family also contributed to the successful completion of this thesis. I particularly appreciate the support given to me by my parents. Without their support, I would not have attempted to complete this thesis.
Contents
Abstract in Chinese ... 1 Abstract in English…... 2 Acknowledgements………... 3 Contents………... 4 List of Tables ………...…... 5 List of Figures………...…... 7 1. Introduction………...……….… 8 2. Literature Review………..………123. Semiparametric Stochastic Shadow Cost Frontiers……….……..14
4. Monte Carlo Simulations……….……….22
4.1 Design of Experiments………..…22 4.2 Model Specifications……….24 5. Simulation Results……….27 6. An Empirical Application……….……….54 7. Conclusion……….………….……….61 References……….……….….63 Appendix……….………66
List of Tables
Table 1. The performance of the allocative parameter estimates setting M(‧)=2 ln(1y1)………... 27 Table 2. The performance of the parameter estimates in Step 1 setting
M(‧)=2 ln(1y1) ……….. 28 Table 3. The performance of the parameter estimates from the third-stage
setting M(‧)=2 ln(1y1) ……… 31 Table 4. The performance of the estimators of 2
( , , ) setting M(‧)=2 ln(1y1) ……….. 37 Table 5. The performance of estimated function lnG setting M(‧)=2 ln(1y1) 40 Table 6. The performance of estimated AE setting M(‧)=2 ln(1y1)…….…. 42 Table 7. The performance of estimated TE scores setting M(‧)=2 ln(1y1)... 43 Table 8. The performance of the allocative parameter estimates setting
M(‧)=2 ln(1y1) ln y2………... 45 Table 9. The performance of the parameter estimates in Step 1 setting M
(‧)=2 ln(1y1) ln y2………... 46 Table 10. The performance of the parameter estimates from the third-stage
setting M (‧)=2 ln(1y1) ln y2………... 47 Table 11. The performance of the estimators of 2
( , , ) setting M (‧)=2 ln(1y1) ln y2………... 50 Table 12. The performance of estimated function lnG setting M
(‧)=2 ln(1y1) ln y2………. 52 Table 13. The performance of estimated AE setting M ( ‧ ) =
1 2
2 ln(1y) ln y ………. 52 Table 14. The performance of estimated TE scores setting M
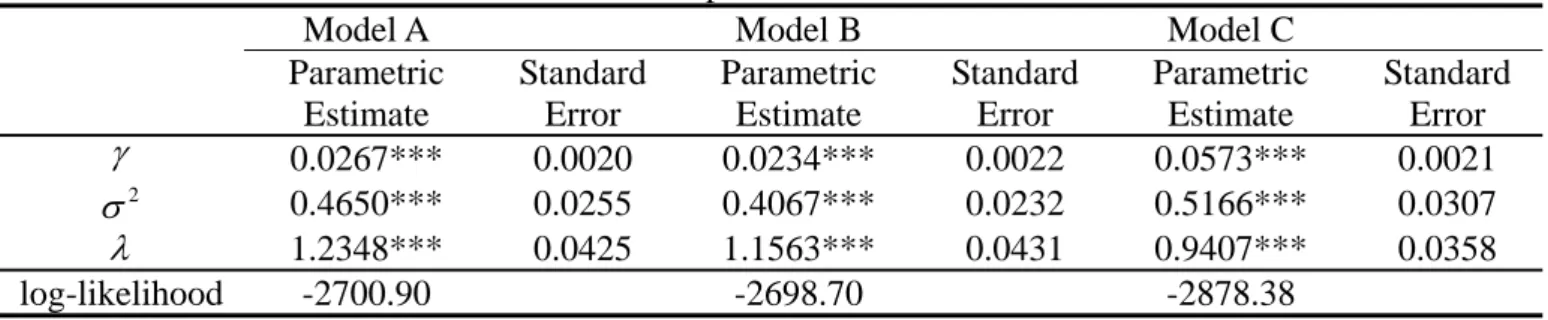
(‧)=2 ln(1y1) ln y2……….… 53 Table 15. Estimates of the country-specific AE parameters……… 56 Table 16. average relative input prices and relative input quantities…………... 56 Table 17. Parameter estimates of the Semiparametric regression………... 57 Table 18. Estimates of the distribution parameters of the three models……….. 58 Table 19. Average TE and AE scores of the three models………... 58 Table 20. Country-specific TE and AE measures of Model A………... 59 Table I. The performance of the estimators of 2
( , , ) for the case of 2
( , , )= (-0.025 , 1.88 , 1.66) setting M(‧)=2 ln(1y1)……….. 66 Table II. The performance of the estimators of lnG, AE and TE for the case of
2
( , , )= (-0.025 , 1.88 , 1.66) setting M(‧)=2 ln(1y1)……….. 67 Table III. The performance of the allocative parameter estimates setting
M(‧)=2 ln(1y1) as N=30………. 68 Table IV. The performance of the parameter estimates in Step 1 setting
M(‧)=2 ln(1y1) as N=30………... 68 Table V. The performance of the parameter estimates from the third-stage 68
setting M(‧)=2 ln(1y1) as N=30………...……..…… Table VI. The performance of the estimators of 2
( , , ) setting M(‧)=2 ln(1y1) as N=30 ……… 69 Table VII. The performance of estimated function lnG setting M(‧)=2 ln(1y1)
as N=30……… 69 Table VIII. The performance of estimated AE setting M(‧)=2 ln(1y1) as
N=30……… 69 Table IX. The performance of estimated TE scores setting M(‧)=2 ln(1y1)
as N=30………...……. 69 Table X. The performance of the first-stage parameter estimates using
cross-sectional data assuming (2, ) = (1.88, 1.66)……….…. 70 Table XI. The performance of the third-stage parameter estimates using
cross-sectional data assuming ( 2, )= (1.88,1.66)………..………. 70 Table XII. The performance of the estimators of 2
( , ) and M(‧) using cross-sectional data assuming ( 2, )=(1.88,1.66)……….... 70 Table XIII. The performance of the estimated lnG using cross-sectional data
assuming ( 2, )=(1.88,1.66)……… 71 Table XIV. The performance of the estimated AE using cross-sectional data
assuming ( 2, )=(1.88,1.66)……… 71 Table XV. The performance of the estimated TE score using cross-sectional
data assuming ( 2, )=(1.88,1.66)……… 71 Table XVI. The performance of the parameter estimates in Step 1 setting
M(‧)= y1 ln(1y1)……… 72 Table XVII. The performance of the parameter estimates from the third-stage setting
M(‧)= y1ln(1y1)………. 73
Table XVIII. The performance of the estimators of 2
( , , ) setting M(‧)= y1ln(1y1)………..…….. 75 Table XIX. The performance of estimated function lnG setting
M(‧)= y1 ln(1y1)……… 75 Table XX. The performance of estimated AE setting M(‧)=
1 ln(1 1)
y y ….. 76 Table XXI. The performance of estimated TE scores setting
M(‧)= y1 ln(1y1)………. 76 Table XXII. Parameter estimates of the Translog model………. 77 Table XXIII. Average AE and TE scores of the Translog model………... 77
List of Figures
1. Introduction
A parametric linear or nonlinear regression model requires setting a specific
functional form prior to estimation in order to describe the true but unknown
relationship between the dependent and the independent variables. Consequently,
potential specification errors are likely to occur, leading to an inconsistent estimation.
Although some economic models do explicitly suggest relationships among economic
variables, most implications of economic theory are nonparametric. Therefore, if one
has reservations about a particular parametric form, then a nonparametric function can
be an alternative candidate. Nonparametric regression models permit the functional
relationship to be unknown and nevertheless fit the data quite well without imposing
restrictions beyond some degree of smoothness. They deliver estimators and inference
procedures that are less reliant on the imposition of specific functional forms.
Inclusion of the nonparametric element may circumvent an inconsistent estimation
arising from invalid parameterization. However, the inherent critical element of the
“curse of dimensionality"limits the unknown function of a nonparametric model to contain a small number of variables to lessen the approximation error to the unknown
function.
A researcher in some cases may be confident about a particular parametric form
for one portion of the regression function, but less sure about the shape of another
portion. Such prior beliefs justify the necessity for linking parametric with
nonparametric techniques to formulate semiparametric regression models. The added
value of semiparametric techniques consists in their competence to largely mitigate
and nonparametric components have their conventional rates of convergence.1 See, for example, Härdle (1990), Wand and Jone (1995), Fan et al. (1996), and Yatchew
(1998, 2003).
Fan et al. (1996) first extended the traditional stochastic production frontier
model, dated back to Aigner et al. (1977) and Meeusen and Van Den Broeck (1977),
to a semiparametric frontier model in the context of cross section. They proposed
pseudo-likelihood estimators and proved by Monte Carlo experiments that the
finite-sample performance of their estimators is satisfactory. Deng and Huang (2008)
further generalized it to a panel data setting and allowed for time-variant technical
efficiency (TE) in the form of Battese and Coellli (1992). Nevertheless, almost all of
the related works that use a semiparametric frontier model focus on the study of
technical efficiency (TE). Kumbhakar and Wang (2006a) found that the assumption of
fully allocative efficiency (AE) in a cost function tends to bias parameter estimates of
the cost function and subsequent measures using these estimates.
To obtain both TE and AE measures, one is suggested to estimate the shadow
cost system, consisting of an expenditure (cost) equation and the corresponding share
equations, simultaneously using the maximum likelihood. Unfortunately, the highly
nonlinear nature of the simultaneous equations makes the estimation almost
untractable. Kumbhakar and Lovell (2000) proposed a two-step procedure with an eye
to simplify somewhat the estimation problem of a pure parametric shadow cost
system. The share equations are estimated in the first step by the method of nonlinear
iterative seemingly unrelated regression (NISUR) to acquire the shadow price
1
Robinson (1988) showed that the parametric estimators are consistent at the parametric rate of
1/ 2
parameter estimates of interest. These estimates are treated as given in the second step,
where the maximum likelihood technique is exploited to estimate the stochastic cost
frontier alone after appropriately transforming the original expenditure equation using
the first step estimates. This procedure is less efficient but computationally simpler.
However, Kumbhakar and Lovell (2000) did not address the properties of their
proposed estimators. In addition, they repeat estimating the parameters in the second
step and do not specify in which step the estimates should be used to calculate
technical and allocative efficiencies respectively. Thereby, the main problem is: which
estimates should we choose?Do the estimates in the second step behave more
efficient than those in the first step?And is it possible to take all of the fist step
estimates as given and then estimate the remaining parameters only?In this paper we
propose three models in order to solve the aforementioned questions.
The purpose of the current work is four-fold. First, we relax the parametric
restriction on a cost function representing technology in order to at least diminish the
possible specification error. Second, the semiparametric stochastic shadow cost
frontier offered by this paper differs from the standard semiparametric regression
model and from the stochastic production frontier of Fan et al. (1996). Specifically,
our model accommodates both TE and AE to avoid biased estimates of the technology
parameters. To the best of our knowledge, no work has been done to introduce both
efficiency measures into a semiparametric stochastic shadow cost frontier under the
framework of panel data. It is hoped that this research will bridge the existing gap and
to better characterize a firm’s optimization behavior. Third, a distinct five-step
procedure from the one suggested by Kumbhakar and Lovell (2000) is proposed to
facilitate the estimation. We argue for the new procedure due to the fact that its
increases by applying Monte Carlo simulations. Finally, an empirical study using
unbalanced panel data of commercial banks from 14 East European countries
spanning 1993-2004 is carried out to illustrate the superiority of our semiparametric
stochastic shadow cost frontier model.
The rest of this paper is organized as follows. Section 2 briefly reviews the
relevant literature. Section 3 first presents the semiparametric stochastic cost frontier
with shadow input prices and then proposes the estimation procedure. Section 4
introduces the design of Monte Carlo experiments to be conducted in the next section.
Section 5 provides and discusses the results of the experiments, which are intended to
detect a suitable estimation procedure leading to consistent estimators. Section 6
illustrates the recommended estimation procedure with an empirical study, while the
2. Literature Review
The TE score of a firm can be estimated by two main approaches, i.e., data
envelopment analysis (DEA) and stochastic frontier approach (SFA). The former
involves mathematical programming without the need for specifying an explicit
functional form, while the latter employs the econometric methods to deal with the
composed random disturbances. These approaches have their own advantages and
weaknesses. Fan et al. (1996) elegantly extended the standard parametric SFA to a
semiparametric model in the context of cross section, where the functional form of the
production frontier needs not to be specified a priori. Their method makes use of
nonparametric regression techniques to avoid the requirement of specifying a
particular production function, associating a firm’s output with inputs. Therefore, the
possible problem of misspecification is no longer a key issue as opposed to the
conventional parametric approach, even though a translog functional form is utilized.
Deng and Huang (2008) generalized the semiparametric model of Fan et al. (1996) to
a panel data setting and allowed for time-varying TE. Their empirical evidence finds
that the standard parametric translog production function tends to underestimate the
TE score due to the possible specification error and its lack of flexibility in describing
firms’ production characteristics.
Wheelock and Wilson (2001) estimated and compared the measures of scale and
scope economies for U.S. commercial banks, derived from estimating parametric and
nonparametric cost equations, without regard to TE and AE. In an expenditure
equation modeling both technical inefficiency (TI) and allocative inefficiency (AI), it
is difficult for researchers to appropriately relate the two-sided disturbances in the
input share equations to the nonnegative AI term in the expenditure equation. This is
Cornwell (1994), Kumbhakar (1996a), Huang (2000), and Huang and Wang (2004), to
mention a few, utilized shadow prices to account for AI in addition to TI. Kumbhakar
(1996b, 1997) gave a complete treatment on how to model TI and AI concurrently.
Kumbhakar and Wang (2006b) demonstrated an alternative primal system, consisting
of a production function and the first-order conditions of cost minimization. However,
the cost function associated with the translog production function cannot be
analytically derived. The shadow price technique does not need to specify an ad hoc
relationship between the AI term of the expenditure equation and the disturbance
terms of the share equations. In addition, this technique can be applied to any
parametric cost function as well as some semiparametric cost functions. We therefore
adopt the technique throughout the paper.
The impact of deregulation on bank performance in East European countries has
recently been studied by several researchers, e.g., Kraft and Tirtiroglu (1998), Jemric
and Vujcic (2002), Nikiel and Opiela (2002), Hasan and Marton (2003), Bonin et al.
(2005a, 2005b), Fries and Taci (2005), and Yildirim and Philippatos (2007). The
foregoing works fail to take the potential AI into account. As the input or the output
prices may be somewhat under the control of the governments of the transition
nations, these prices are likely to respond to market conditions tardily. Allocative
distortion may play a crucial role in allocating financial resources in these countries.
This justifies the requirement of evaluating bank efficiencies on the basis of both TE
3. Semiparametric Stochastic Shadow Cost Frontiers
Let the jth shadow input prices, Wj,
be defined as
j j j
W H W , j1,...,J (3-1)
, where H (j 0) denotes the allocative parameter of input j, measuring the extent to which the shadow and actual input prices (W ) differ. It thus reflects the degree of j
allocative inefficiency arising from, e.g., regulation or slow adjustment to changes in
input prices. Here, a firm’s decision is assumed to be grounded on shadow input
prices. Following Atkinson and Cornwell (1994), Kumbhakar (1996b, 1997), and
Huang and Wang (2004), the minimized efficiency adjusted shadow cost, C , for a **
firm employing input vector X to produce output vector Y can be expressed as:
0 ) , ( ) ( min ) , ( Y bX F bX b W b W Y C ) , ( 1 C Y W b (3-2)
, where b(0 b1) represents the degree of input-oriented TI, *
C is referred to as
the shadow cost function independent of the TI parameter of b, and Y is an m-vector of output quantities. A firm is said to be technically efficient if it has a value
of b1, while a firm operating beneath the efficiency frontier has a value of b< 1. The larger the value of b is, the more technically efficient the firm will be. Function
) , (
F represents the production transformation function.
Since a cost function must satisfy the homogeneity restriction of degree one in
input prices, we can only measure J1 relative allocative parameters Hj/H , k
, 1,...,
jth input tends to be overused (underused) relative to input k. Either overuse or
underuse reflects the presence of AI. Using Shephard’s Lemma, the shadow cost share
equation of input j is written as:
* * * * * * ln , ln j j j j bW X C S W Y W C . (3-3) After some manipulations and taking a natural logarithm, a firm’s actual expenditure(E) can be associated with C** (C*) and S*j as follows:
1 1
ln ln ln j j ln ( , ) ln j j
j j
E C
H S C Y W
H S U (3-4) , where U lnb represents the additional (log) expenditure incurred by TI and is specified as a one-sided error term later, ln j1 jj
H S
captures a partial extra cost entailed by AI, and the remaining extra cost of AI is embedded in lnC(Y,W) dueto .W W
Equation (3-4) becomes a regression equation after appending a two-sided
random disturbance v to it, where v is assumed to be distributed as 2 (0, v).
N Term Uv forms the composed error term. This equation associates TI with AI systematically. To identify the allocative parameters, one has to count on the share
equations. It can be shown that the actual share equation of input j (S ) is formulated j
as 1 1 , 1, , j j j j j j H S S j J H S
. (3-5)After appending random disturbances to these share equations, they can be used to
help estimate parameters H . When panel data are available, it is more ambitious to j
Coelli (1992) is adopted with Unt unexp[(t T )], n1,...,N , t1,...,T, where
n
u is a firm-specific TI random variable distributed as N(0,u2) independent of nt
v , and g t( )exp[(t T )] contains an extra parameter to be estimated.2
We now turn to the functional form of lnC(Y,W) in (3-4). It is
conventionally specified as a translog form, or as a Fuss functional form like Berger
et al. (1993), or as a Fourier flexible function such as Altunbas et al. (2001) and
Huang and Wang (2004). In this paper lnC(Y,W) is formulated as a
semiparametric form:
* *
lnC Y W( nt, nt)Xnt M(lnYnt) (3-6) , where X consists of the linear and quadratic terms of nt lnWjnt* ( j1,...,J), the cross product terms among *
lnWjnt, and the cross product terms of *
lnWjnt with lnY (int i1,...,m), is the corresponding unknown parameter vector, lnY is a nt
1
m random vector of (log) outputs with support, and M is assumed to be a ( ) smooth function with unknown form.
We rewrite our cost function system as:
lnEnt XntlnGntM(lnYnt)nt (3-7) 1 1 , 1, , j jnt jnt jnt j jnt j H S S j J H S
(3-8) , where 1 * ln nt ln j j j G
H S ,nt unexp[(t T )]vnt, and nt (1nt,...,Jnt) is a random vector with mean zero and constant covariance matrix. v and nt nt represent the usual statistical noise and are assumed to be distributed independently of each other. It can be shown that the nth firm’s probability density function of thecomposed disturbance n (n1,...,nT) is equal to:
2
Term g(t) decreases at an increasing rate if > 0, increases at an increasing rate if < 0, or stays constant if = 0.
1 2 1 2 1 ( ) [1 ( )] ( ) exp ( ) 2 T nt n T n n t v v h A A
(3-9) , where n nt ( ) / t A
g t ,g t( )e(t T ), u / v,2 v2u2
Tt1g t2( ), and ( ) and ( ) are the standard normal density and standard normal cumulative distribution functions, respectively. The log-likelihood function of expenditure equation (3-7) alone can be easily derived by first multiplying (3-9) over firms and then taking the natural logarithm. Combining (3-9) with the joint probability density
function of the (J1) random disturbances of the share equations (nt), the cost function system can be simultaneously estimated by the maximum likelihood if M has a known form.3 Readers are suggested to refer to, e.g., Ferrier and Lovell (1990) and Kumbhakar (1991), for details.
Three difficulties deserve specific mention. First, since the log-likelihood function of the above cost function system is highly nonlinear, getting maximum likelihood estimators is computationally difficult, even though not infeasible. Second,
M has an unknown functional form, hindering the log-likelihood function of the expenditure equation from being maximized with respect to M in particular. One alternative relies on the use of some nonparametric approaches to estimate M . However, M cannot be estimated directly by existing nonparametric regression
methods, because M is not the conditional expectation of lnEnt XntlnGnt given lnY . This is caused by the nonzero mean of one-sided error nt U , i.e.: nt
E
lnEntXntlnGnt | lnYnt
M(lnYnt) t( 2, , )M(lnYnt) (3-10) , where 2 2 2 2 2 ( , , ) ( | ln ) ( ) ( ) 1 ( ) t nt nt u t E U Y g t g t g t
(3-11)One cannot separate M(lnYnt) from E
lnEnt XntlnGnt | lnYnt
of (3-10) by employing a nonparametric estimation. This problem can be solved by substituting3
Note that random vector nt must now be assumed to be distributed as a multivariate normal with mean vector zero and constant covariance matrix.
ln nt nt ln nt | ln nt
tE E X G Y for M(lnYnt)into the log-likelihood function.
ln nt nt ln nt | ln nt
E E X G Y can now be consistently estimated by the nonparametric approach. For details, please see, e.g., Fan et al. (1996). Finally, term
1 * ln nt ln j j
j
G
H S is obviously a nonlinear function of unknown parameters, leading the kernel estimation procedure for a standard semiparametric regression model, as proposed by Robinson (1988), to be not applicable. We shall discuss possible ways of getting rid of this difficulty in Subsection 4.1, which influence the consistency of the parameter estimates and are the core of this study.
We adopt the kernel estimation technique to estimate the conditional
expectations, such as E
lnEnt| lnYnt
, since it is one of the popular nonparametric estimation methods. Specifically, the Nadaraya-Watson kernel estimator (Nadaraya, 1964; Watson, 1964) for a scalar lnY is given by: nt1 1 1 1 ln ln ln ˆ (ln ln ) ln ln N T nt it it i t nt N T nt it i t Y Y E K h E E Y Y Y K h
(3-12) , where K is the kernel function and h is the smoothing parameter. Equation ( )(3-12) can be easily extended to a higher dimensional case of lnY . The rest of the nt
conditional expectations can be estimated analogously.
We now outline the estimation procedure of the semiparametric shadow cost
frontier in the following five steps.
Step 1. Simultaneously estimate the J1 input share equations of (3-8) by the
NISUR to obtain the J1 estimates of relative allocative parameters Hj/Hk (j =
1,…, J and j ) and a part of the parameters involving the input prices of k expenditure equation (3-7).4 These estimates can be shown to be consistent and are
4
Terms involving solely (log) outputs do not emerge in the share equations after taking the partial derivatives of the expenditure equation with respect to (log) input prices.
used to calculate lnG , denoted by nt lnGˆnt.
Step 2. Apply formula (3-12) to obtain the kernel estimates of E(lnEnt lnYnt),
( nt ln nt),
E X Y and E(lnGˆnt| lnYnt), denoted by ˆ (lnE E lnYnt), ˆ (E X lnYnt), and
ˆ
ˆ (ln | ln nt),
E G Y respectively.
Step 3. Equation (3-7) subtracts its own conditional expectations on lnY to yield nt
ˆ
lnEnt E(lnEnt lnYnt)[XntE X( nt lnYnt)]lnGntE(lnGnt| lnYnt)nt (3-13)
After substituting the kernel estimates derived in Step 2 for those conditional
expectations in (3-13), parameters can be consistently estimated by the nonlinear least squares method, since the new error component nt ( vntUntt) has zero mean asymptotically. The nonlinear least squares is required due to the nonlinearity of
lnG . This distinguishes the current paper from Robinson (1988), where the ordinary nt
least squares apply.
Step 4. Let
ˆ ˆ ˆ
ˆ ˆ ˆ
ˆ = lnnt Ent E(lnE lnYnt) [Xnt E X( lnYnt)] lnGnt E(lnG| lnYnt) t
(3-14) Maximizing the log-likelihood function derived from (3-9) with replaced by nt
ˆ nt
over 2
and , one obtains the solution to after tedious manipulation as 2 4 ˆ 2 b b ac a (3-15) , where 1 2 2 t2/( ) t a
g TT , 2 t2 t TT T
g , 3/ 2 2 2 2 (1 t ) / it t /( ) t i t b
g
e g nTT , ˆ ˆ ˆ ˆ ˆ ln (ln ln ) [ ( ln )] [ln (ln | ln )] it nt nt nt nt nt nt e E E E Y X E X Y G E G Y ,and
2 2 2
(1 t) it/( ) t i t
c
g e nTT .In (3-15) notation “^” is added on since the kernel and NISUR estimators of ˆ (.| )it
E x and ˆ are used to replace their respective true counterparts. For details, please see Deng and Huang (2008) for a panel data setting with time variant TI.
Because is a function of , ˆ , and data, it can be concentrated out of the log-likelihood function to reduce the number of unknown parameters.
Step 5. Maximize the concentrated log-likelihood function of the expenditure
equation over the remaining two unknown parameters of and , where is nt replaced by in Step 4. The resulting pseudolikelihood estimates are denoted by ˆ nt
ˆ
and ˆ. Substituting them into (3-15), we get the estimate of and still signify it by Plugging the three estimates into (3-11) yields the estimate of ˆ. , denoted t by . Finally, the nonparametric function ˆt M(lnYnt) can be consistently estimated by
ˆ
ˆ(ln ) ˆ(ln ln ) ˆ( ln ) ˆ(ln | ln ) ˆ
nt nt nt nt t
M Y E E Y E X Y E G Y (3-16)
where ˆ comes from the estimates of Step 3.
It is well known that the maximum likelihood estimator of and must be asymptotically unbiased and efficient if the regularity conditions hold. Although the
individual kernel regression estimators of Step 2 have pointwise convergence rates
slower than root-NT (NT1/ 2), where NT signifies the sample size, the average
quantities of the elements in (3-15) have an order of O NTp( 1/ 2)
under very weak
conditions. See, for example, Härdle and Stoker (1989) and Fan and Li (1992). Fan et
al. (1996) claimed that 2 2 ˆ
1/ 2
( )
p
estimator Mˆ (lnYnt) of (3-16) is a function of several kernel regression estimators,
having slower convergence rates than NT1/ 2 , it consequently converges to
(ln nt)
M Y for each nt at a slower rate than NT1/ 2.
The foregoing five steps complete the entire estimation procedure and the resulting estimates can be further utilized to evaluate, e.g., measures of AE and TE. In particular, the formula proposed by Battese and Coelli (1992) is adopted to gauge
each firm’s TE score. Based on (3-4), the (log) cost of AI, denoted by u , is defined ntAI
as the difference between the (log) shadow expenditure (ln ( , ) ln j1 j j
C Y W
H S ) and the (log) optimized cost (lnC Y W
,
) that achieves AE, i.e.:
* * * ln , ln , ln , AI nt nt nt nt nt nt nt u C Y W G Y W C Y W , (3-17) which is a non-negative value by definition. The measure of AE is then obtained bytaking the natural exponent of minus u , which ranges from zero to unity. ntAI
There are three attributes worth noting. First, the consistent estimates of J1 relative allocative parameters Hj/H (j = 1,…, J and jk ) yielded in Step 1 are k treated as given throughout the remaining four steps. This avoids estimating the whole cost system simultaneously by the maximum likelihood and the difficulty in achieving convergence, on the one hand. The number of parameters to be estimated in later steps
is largely decreased, on the other hand. Second, despite the fact that lnGˆnt can be computed in Step 1 and is used to obtain kernel estimate Eˆ (ln | lnGˆ Ynt) in Step 2, parameters included in lnG of (3-13) need to be estimated again along with nt , even though they have already been estimated in Step 1. Conversely, Kumbhakar and
Lovell (2000) suggested subtracting lnGˆnt directly from the dependent variable of (3-13), which may give rise to undesired estimation results. We will come back to this shortly. Third, since Step 5 aims to estimate merely and , the log-likelihood function is usually not very difficult to converge.
4. Monte Carlo Simulations
This section first proposes three models to be used to compare the performance
of their estimators. The next subsection specifies an expenditure equation and
addresses the data generation processes for all variables involved.
4.1 Design of Experiments
We plan to perform Monte Carlo simulations using three models and evaluate the
properties of their estimates in terms of bias and mean square errors (MSE). Model A
follows the five steps addressed by the previous section. Models B and C are adapted
from Model A for the purpose of making comparisons among the three models. At the
outset, all of the three models have to estimate the input share equations using the
NISUR, i.e., carrying out the first step. The J 1 allocative parameter estimates are next exploited to estimate lnG and AE, denoted by G1 and AE1, respectively, nt
while the subsequent steps of the three models differ from one another. Note that the
1
J allocative parameters are treated as given thereafter. We now introduce them in details.
(i) Model A
This preferred model follows exactly the above five steps. Using the kernel
estimates of ˆ (lnE E lnYnt), ˆ (E X lnYnt), and Eˆ (ln | lnGˆ Ynt) from Step 2, we
estimate equation (3-13) by the NISUR in Step 3 to obtain the estimates of . At the same time, nonlinear function lnG is assumed to be unknown, i.e., all of the nt
parameters shown in the parametric part of the cost function are jointly estimated, but
exclude the parameters associated with the distribution of v and U. Estimates ˆ together with the J1 allocative parameter estimates are employed to calculate new estimates of lnG and AE, denoted by G2A and AE2A. The remaining parameters nt
(ii) Model B
This model is similar to Model A except that function lnG is treated in a nt
different way. Specifically, the estimated lnG , nt lnGˆnt, derived from Step 1 is
viewed as fixed so that it can be subtracted from the dependent variable. The new
transformed equation becomes
lnEnt lnGˆntE(lnEntlnGˆnt lnYnt)[XntE X( nt lnYnt)] ˆnt (4-1)
, where the notations are similarly defined to (3-13). After substituting the kernel
estimates of Eˆ (lnElnGˆ lnYnt) and ˆ (E X lnYnt)for the corresponding conditional means in (4-1), is estimated simply by ordinary least squares (OLS). This procedure is analogous to the one proposed by Kumbhakar and Lovell (2000,
p.295-296) in spirit, while their underlying model is parametric. Estimates ˆ are next used to compute lnG and AE, denoted by G2B and AE2B. Finally, Steps 4 nt
and 5 are executed.
(iii) Model C
This model is further adapted from Model B and is similar to the one suggested
by Kumbhakar and Lovell (2000, p.165) in essence. Again, their underlying model is
parametric. Since the input share equations include vector , their consistent estimate ˆ from Step 1 can be treated as fixed. In this manner, the new dependent variable turns out to be lnEnt lnGˆntXntˆ with corresponding kernel estimate
ˆ ˆ ˆ (ln ln ln nt)
E E GX Y obtained by Step 2. Step 3 is no longer needed and Equation (3-14) of Step 4 is modified accordingly as:
ˆ ˆ ˆ ˆ ˆ
ˆnt lnEnt lnGnt Xnt E(lnE lnG X lnYnt) t
(4-2) After concentrating out 2, we execute Step 5. This completes the entire procedure.
It is seen that the major differences among the three models stem from distinct
treatments on lnGˆnt and ˆ. As a result, we can compare the performance of the
resulting estimates among Models A to C, including the distribution parameters of v
and U.
4.2 Model Specifications
This subsection specifies the expenditure equation and the data generation
processes for all variables involved that will be used to carry out Monte Carlo
simulations to investigate the finite-sample performance of the proposed estimators in
the last subsection. Since we are also interested in the effects of the number of firms
(N) and time periods (T) on the parameter estimates, we consider several (N, T)
combinations. Specifically, we choose N = 50, 100, 200 with T = 6, 10, 20. Following
Olson et al. (1980) and Fan et al. (1996), we consider three sets of variances and
variance ratios, viz. (2, ) = (1.88, 1.66), (1.35, 0.83), (1.63, 1.24). Finally, = 0.025 and -0.025 are arbitrarily chosen.
The semiparametric cost frontier incorporating a single output and three inputs is
formulated as: * * * 2 * 2 1 2 2 3 3 22 2 33 3 * * * * 23 2 3 12 1 2 13 1 3 ln (ln ) ln 1 1 2 ln(1 ) ln( ) ln( ) [ln( )] [ln( )] 2 2 ln( ) ln( ) ln ln( ) ln ln( ) ln E M Y X G u v y b W b W d W d W d W W e y W e y W G u v (4-3)
Here, smooth function M is arbitrarily assumed to be equal to ( ) 2 ln(1y1). Recall that a cost function is required to be linearly homogeneous in input prices and
dependent variable E and the other two input prices to satisfy this requirement. The
symmetry restriction is already imposed on (4-3). To understand whether the
performance of the estimates is robust to changes in the functional form of M , we ( )
specify an alternative form of M( ) 0.2y1. We also extend (4-3) to a two-output and three-input case, assuming either M( ) 2 ln(1y1) ln y2 or
2 1 2 ( ) 2 ln y + y y
M 5. Note that in this extended case, the parametric part of (4-3) has to contain extra terms involving the cross products of ln y and (log) normalized 2
input prices.
Input prices W , 1 W , and 2 W are randomly drawn from dissimilar uniform 3
distributions (0,1)U , (0.5, 0.5)U , and U(0.5,1), respectively. The three-input and
two -output quantities of x , 1 x , 2 x , 3 y , and 1 y are independently generated from 2
normal distributions N(5, 0.5) , (3, 0.1)N , (5, 0.5)N , (31 , 10.1)N , and
(20 , 0.8),
N respectively. Two-sided error v is drawn from N(0,v2) and
one-sided error u from a half-normal N(0,u2). The simulations are executed
1000 times for each model and the bias and the MSE are computed based on the 1000
replications. We set H2/H = 0.8 and 1 H3/H =1.2. The true values of the 1
coefficients are as follows: b = 0.3, 2 b = 0.7, 3 d = -0.05, 22 d = -0.02, 33 d = 0.5, 23
12
e = 0.7, e = 0.9, 13 e = 0.3, and 22 e = 0.5. 23
The corresponding input share equations can be readily deduced by taking the
first partial derivatives of lnE with respect to lnW , i = 1, 2, 3. Although the functional i
form of an expenditure equation is not unique, we recommend using those such as
(4-3). A prominent feature of (4-3) consists in its smooth function being specified as a
5
function of (log) outputs only, i.e., the (shadow) input prices must be excluded.
Otherwise, one is confronted with a problem on how to properly disentangle the
allocative parameters contained in M . More importantly, the share equations are ( )
unable to be explicitly derived by taking partial derivatives due to the unknown
smooth function dependent of shadow prices. This impedes a researcher from
5. Simulation Results
This section compares the performance of the estimators discussed in the
previous two sections. To compare three models we consider the properties of the
estimators as the sample size gets very large. We would like the estimators to get close
to the true values as the sample size increases. It is natural to consider the objective
that the mean square error (MSE) of the estimators should approach zero as the
sample size gets very large. The MSE criterion implies that the estimator is unbiased
asymptotically and that its variance goes to zero as the sample size increases.
Accordingly, the model can be regarded as a good one as its estimators satisfy the
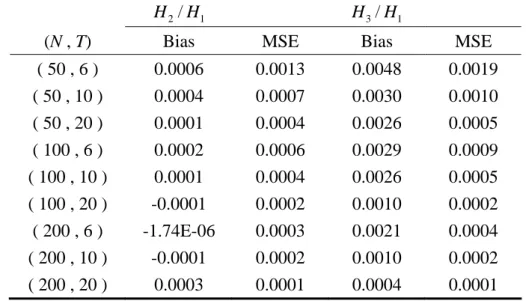
large sample properties. Table 1 summarizes the simulation outcomes of the empirical
moments, i.e., bias and MSE, from the estimators for the nine (N, T) bundles. We first
look at the performance of the allocative parameters, estimated in the first step. One
thing that is immediately noticeable is that H2/H and 1 H3/H are well estimated 1
even for the case of the smallest sample size, i.e., (N, T) = (50, 6). Another desirable
feature is that the bias and the MSE fall when either N or T increases, aside from the
bias of H2/H when N = 200. Even in those exceptional cases the biases are 1
negligible.
Table 1. The performance of the allocative parameter estimates setting M(‧)=2 ln(1y1)
2/ 1
H H H3/H 1
(N , T) Bias MSE Bias MSE ( 50 , 6 ) 0.0006 0.0013 0.0048 0.0019 ( 50 , 10 ) 0.0004 0.0007 0.0030 0.0010 ( 50 , 20 ) 0.0001 0.0004 0.0026 0.0005 ( 100 , 6 ) 0.0002 0.0006 0.0029 0.0009 ( 100 , 10 ) 0.0001 0.0004 0.0026 0.0005 ( 100 , 20 ) -0.0001 0.0002 0.0010 0.0002 ( 200 , 6 ) -1.74E-06 0.0003 0.0021 0.0004 ( 200 , 10 ) -0.0001 0.0002 0.0010 0.0002 ( 200 , 20 ) 0.0003 0.0001 0.0004 0.0001
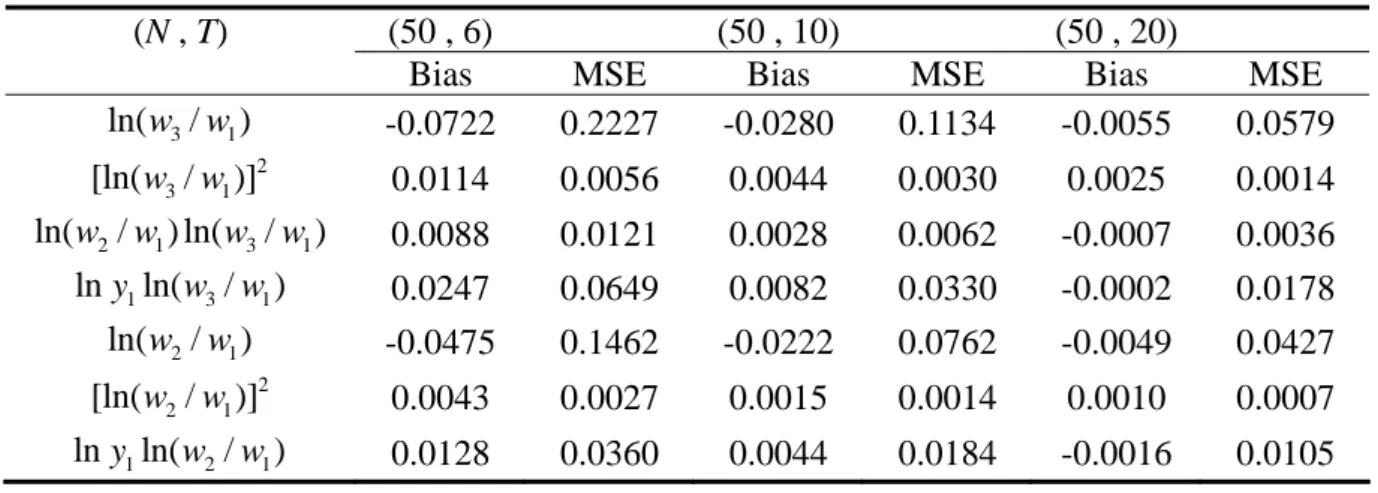
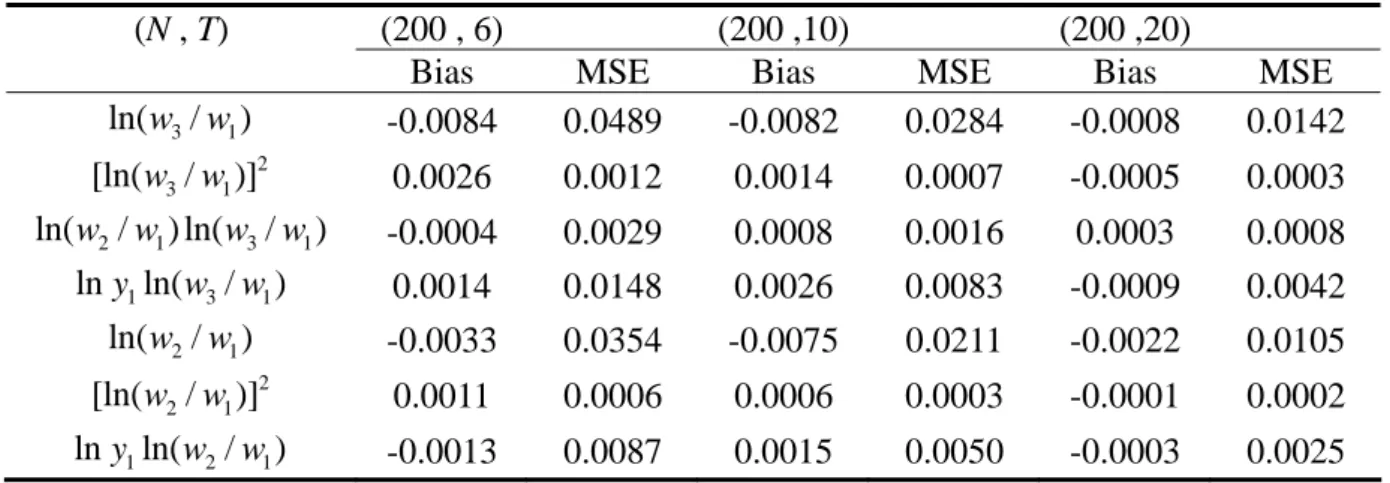
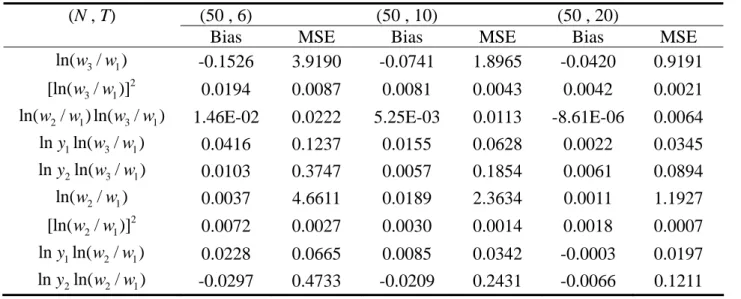
Table 2 reveals that in general the MSEs of the parameter estimates of the
parametric portion fall quickly when either N or T increases. For instance, when
fixing N = 50, the MSE of the coefficient of ln(w3/w shrinks swiftly from 0.2227 1)
to 0.0579 as T increases from 6 to 20. The figure continues to fall to 0.0142 when (N,
T) = (200, 20). In addition, the bias measures exhibit a similar pattern, although the
biases of some coefficients are a little large in the case of (N, T) = (50, 6) relative to
their true values. In summary, the estimators in the first step perform quite well as
expected in terms of their biases and MSEs, which improve when either N or T
increases.
Table 2. The performance of the parameter estimates in Step 1 setting M(‧)=2 ln(1y1)
(N , T) (50 , 6) (50 , 10) (50 , 20)
Bias MSE Bias MSE Bias MSE
3 1 ln(w /w ) -0.0722 0.2227 -0.0280 0.1134 -0.0055 0.0579 2 3 1 [ln(w /w)] 0.0114 0.0056 0.0044 0.0030 0.0025 0.0014 2 1 3 1 ln(w /w) ln(w /w) 0.0088 0.0121 0.0028 0.0062 -0.0007 0.0036 1 3 1 lny ln(w /w ) 0.0247 0.0649 0.0082 0.0330 -0.0002 0.0178 2 1 ln(w /w ) -0.0475 0.1462 -0.0222 0.0762 -0.0049 0.0427 2 2 1 [ln(w /w)] 0.0043 0.0027 0.0015 0.0014 0.0010 0.0007 1 2 1 lny ln(w /w ) 0.0128 0.0360 0.0044 0.0184 -0.0016 0.0105 (N , T) (100 , 6) (100, 10) (100, 20)
Bias MSE Bias MSE Bias MSE
3 1 ln(w /w ) -0.0179 0.0935 -0.0055 0.0579 -0.0082 0.0284 2 3 1 [ln(w /w)] 0.0036 0.0025 0.0025 0.0014 0.0014 0.0007 2 1 3 1 ln(w /w) ln(w /w) 0.0015 0.0052 -0.0007 0.0036 0.0008 0.0016 1 3 1 lny ln(w /w ) 0.0046 0.0276 -0.0002 0.0178 0.0026 0.0083 2 1 ln(w /w ) -0.0171 0.0679 -0.0049 0.0427 -0.0075 0.0211 2 2 1 [ln(w /w)] 0.0011 0.0012 0.0010 0.0007 0.0006 0.0003 1 2 1 lny ln(w /w ) 0.0023 0.0157 -0.0016 0.0105 0.0015 0.0050
(N , T) (200 , 6) (200 ,10) (200 ,20)
Bias MSE Bias MSE Bias MSE
3 1 ln(w /w ) -0.0084 0.0489 -0.0082 0.0284 -0.0008 0.0142 2 3 1 [ln(w /w)] 0.0026 0.0012 0.0014 0.0007 -0.0005 0.0003 2 1 3 1 ln(w /w) ln(w /w) -0.0004 0.0029 0.0008 0.0016 0.0003 0.0008 1 3 1 lny ln(w /w ) 0.0014 0.0148 0.0026 0.0083 -0.0009 0.0042 2 1 ln(w /w ) -0.0033 0.0354 -0.0075 0.0211 -0.0022 0.0105 2 2 1 [ln(w /w)] 0.0011 0.0006 0.0006 0.0003 -0.0001 0.0002 1 2 1 lny ln(w /w ) -0.0013 0.0087 0.0015 0.0050 -0.0003 0.0025
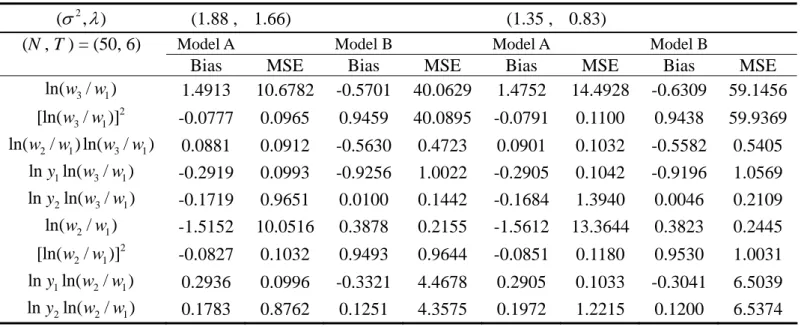
Table 3 presents the biases and MSEs of the parametric part for Models A and B
obtained from Step 3. Generally speaking, these estimators perform poorly. Their
biases and MSEs are much larger than those derived from the first-stage estimation. In
addition, the biases and MSEs of Model A decrease to some extent as the sample size
increases, while the biases of Model B are hardly altered with an the increase in the
sample size. This leads us to conclude that the computationally simple first-stage
estimators of the parametric part outperform the third-step estimators of Models A and
B. Does this imply that Step 3 is redundant? The answer is no. It is necessary for the
estimation of the distribution parameters. Please see below.
The distribution parameters of v and U are estimated in Step 5 by the maximum
likelihood, and Table 4 presents the results. The estimators of Model C have larger
biases and MSEs in comparison with those of Models A and B in most cases. We
therefore drop Model C from now on whenever not necessary and focus our analysis
only on Models A and B. For the case of (2,) = (1.88, 1.66), despite the fact that Model B’s estimator of has lower biases and MSEs than Model A does in almost all cases, though the differences are quite small. Model B’s estimator of 2 performs slightly better than Model A’s, while the reverse is true for the estimator of
. It is a caveat that Model A’s estimator of 2 tends to have a larger variation when the sample size is small. As far as the estimator of smooth function M(‧) is
concerned, Model A is found to be superior to Model B since Model A yields much
smaller biases and MSEs than Model B does in most cases. Only for the cases of a
large time period (T = 20) are Model B’s biases a little less than Model A. Turning to
the cases of (2,) = (1.35, 0.83) and (1.63, 1.24), the results are rather similar to the preceding case.
Table 3. The performance of the parameter estimates from the third-stage setting M(‧)=2 ln(1y1) 2
( , ) (1.88 , 1.66) (1.35 , 0.83) (1.63 , 1.24)
( N , T ) = (50, 6) Model A Model B Model A Model B Model A Model B
Bias MSE Bias MSE Bias MSE Bias MSE Bias MSE Bias MSE
3 1 ln(w /w ) 1.0484 1.2796 -0.4020 0.8330 1.0470 1.3472 -0.3920 1.1417 1.0479 1.2987 -0.3980 0.9200 2 3 1 [ln(w /w)] -0.0298 0.0821 0.7398 1.1935 -0.0305 0.0986 0.7337 1.4732 -0.0297 0.0870 0.7373 1.2713 2 1 3 1 ln(w /w) ln(w /w) 0.0373 0.0796 -0.5661 0.4531 0.0390 0.0946 -0.5619 0.5130 0.0376 0.0841 -0.5644 0.4700 1 3 1 lny ln(w /w ) -0.3118 0.1117 -0.9281 0.9856 -0.3116 0.1173 -0.9220 1.0320 -0.3118 0.1133 -0.9256 0.9973 2 1 ln(w /w ) -1.0744 1.3335 0.2129 0.1685 -1.0684 1.3968 0.2077 0.2251 -1.0721 1.3505 0.2108 0.1845 2 2 1 [ln(w /w)] -0.0349 0.0912 0.7478 0.6114 -0.0375 0.1090 0.7458 0.6336 -0.0356 0.0965 0.7470 0.6174 1 2 1 lny ln(w /w ) 0.3191 0.1162 0.1947 0.0879 0.3173 0.1211 0.1952 0.1108 0.3184 0.1175 0.1949 0.0944 2 ( , ) (1.88 , 1.66) (1.35 , 0.83) (1.63 , 1.24)
( N , T ) = (50, 10) Model A Model B Model A Model B Model A Model B
Bias MSE Bias MSE Bias MSE Bias MSE Bias MSE Bias MSE
3 1 ln(w /w ) 0.8685 0.8114 -0.3865 0.3834 0.8724 0.8423 -0.3911 0.4996 0.8701 0.8204 -0.3884 0.4148 2 3 1 [ln(w /w)] -0.0098 0.0368 0.7075 0.7116 -0.0106 0.0441 0.7142 0.8225 -0.0099 0.0389 0.7102 0.7419 2 1 3 1 ln(w /w) ln(w /w) 0.0106 0.0367 -0.5500 0.3446 0.0113 0.0430 -0.5482 0.3638 0.0108 0.0385 -0.5493 0.3494 1 3 1 lny ln(w /w ) -0.2588 0.0716 -0.9175 0.8822 -0.2599 0.0740 -0.9161 0.8999 -0.2592 0.0723 -0.9170 0.8865 2 1 ln(w /w ) -0.9118 0.8920 0.1990 0.0788 -0.9134 0.9214 0.1974 0.0979 -0.9125 0.9003 0.1984 0.0837 2 2 1 [ln(w /w)] -0.0115 0.0405 0.7459 0.5752 -0.0120 0.0475 0.7476 0.5863 -0.0115 0.0425 0.7466 0.5785 1 2 1 lny ln(w /w ) 0.2715 0.0786 0.2028 0.0580 0.2719 0.0810 0.2006 0.0647 0.2717 0.0793 0.2020 0.0596
2
( , ) (1.88 , 1.66) (1.35 , 0.83) (1.63 , 1.24)
( N , T ) = (50, 20) Model A Model B Model A Model B Model A Model B
Bias MSE Bias MSE Bias MSE Bias MSE Bias MSE Bias MSE
3 1 ln(w /w ) 0.6812 0.4800 -0.4096 0.2192 0.6831 0.4885 -0.4090 0.2419 0.6819 0.4824 -0.4093 0.2245 2 3 1 [ln(w /w)] -0.0011 0.0167 0.7320 0.5860 -0.0012 0.0180 0.7331 0.6097 -0.0011 0.0170 0.7323 0.5917 2 1 3 1 ln(w /w) ln(w /w) 0.0016 0.0169 -0.5532 0.3160 0.0015 0.0182 -0.5507 0.3175 0.0015 0.0172 -0.5522 0.3159 1 3 1 lny ln(w /w ) -0.2027 0.0423 -0.9217 0.8594 -0.2032 0.0430 -0.9194 0.8592 -0.2028 0.0425 -0.9208 0.8587 2 1 ln(w /w ) -0.7134 0.5246 0.2025 0.0505 -0.7137 0.5309 0.2001 0.0535 -0.7135 0.5262 0.2016 0.0511 2 2 1 [ln(w /w)] -0.0021 0.0180 0.7522 0.5699 -0.0020 0.0196 0.7524 0.5720 -0.0020 0.0184 0.7523 0.5704 1 2 1 lny ln(w /w ) 0.2122 0.0462 0.1966 0.0425 0.2122 0.0467 0.1960 0.0440 0.2122 0.0463 0.1964 0.0429 2 ( , ) (1.88 , 1.66) (1.35 , 0.83) (1.63 , 1.24)
( N , T ) = (100, 6) Model A Model B Model A Model B Model A Model B
Bias MSE Bias MSE Bias MSE Bias MSE Bias MSE Bias MSE
3 1 ln(w /w ) 0.8227 0.7571 -0.3908 0.4784 0.8286 0.8027 -0.3999 0.6393 0.8250 0.7712 -0.3944 0.5251 2 3 1 [ln(w /w)] -0.0078 0.0404 0.7216 0.8238 -0.0089 0.0500 0.7323 0.9832 -0.0081 0.0433 0.7258 0.8709 2 1 3 1 ln(w /w) ln(w /w) 0.0083 0.0400 -0.5468 0.3606 0.0094 0.0482 -0.5441 0.3881 0.0085 0.0425 -0.5458 0.3682 1 3 1 lny ln(w /w ) -0.2446 0.0661 -0.9165 0.8992 -0.2462 0.0697 -0.9139 0.9232 -0.2452 0.0672 -0.9155 0.9056 2 1 ln(w /w ) -0.8548 0.8141 0.1972 0.0970 -0.8587 0.8568 0.1945 0.1242 -0.8563 0.8271 0.1961 0.1048 2 2 1 [ln(w /w)] -0.0079 0.0440 0.7469 0.5831 -0.0091 0.0531 0.7501 0.5998 -0.0082 0.0467 0.7482 0.5883 1 2 1 lny ln(w /w ) 0.2536 0.0709 0.1990 0.0630 0.2548 0.0743 0.1953 0.0724 0.2541 0.0719 0.1975 0.0655
2
( , ) (1.88 , 1.66) (1.35 , 0.83) (1.63 , 1.24)
( N , T ) = (100, 10) Model A Model B Model A Model B Model A Model B
Bias MSE Bias MSE Bias MSE Bias MSE Bias MSE Bias MSE
3 1 ln(w /w ) 0.6792 0.4909 -0.3976 0.2700 0.6828 0.5104 -0.3997 0.3295 0.6806 0.4967 -0.3984 0.2861 2 3 1 [ln(w /w)] -0.0019 0.0186 0.7234 0.6283 -0.0022 0.0221 0.7275 0.6892 -0.0019 0.0196 0.7250 0.6452 2 1 3 1 ln(w /w) ln(w /w) 0.0028 0.0188 -0.5493 0.3237 0.0029 0.0220 -0.5464 0.3312 0.0028 0.0197 -0.5482 0.3253 1 3 1 lny ln(w /w ) -0.2019 0.0431 -0.9174 0.8632 -0.2029 0.0447 -0.9147 0.8688 -0.2023 0.0436 -0.9164 0.8642 2 1 ln(w /w ) -0.7082 0.5319 0.1985 0.0602 -0.7098 0.5489 0.1956 0.0692 -0.7089 0.5368 0.1974 0.0625 2 2 1 [ln(w /w)] -0.0035 0.0208 0.7490 0.5698 -0.0036 0.0245 0.7501 0.5763 -0.0034 0.0218 0.7494 0.5718 1 2 1 lny ln(w /w ) 0.2103 0.0466 0.1987 0.0477 0.2108 0.0480 0.1970 0.0515 0.2105 0.0470 0.1980 0.0486 2 ( , ) (1.88 , 1.66) (1.35 , 0.83) (1.63 , 1.24)
( N , T ) = (100, 20) Model A Model B Model A Model B Model A Model B
Bias MSE Bias MSE Bias MSE Bias MSE Bias MSE Bias MSE
3 1 ln(w /w ) 0.5231 0.2817 -0.3974 0.1864 0.5242 0.2861 -0.3972 0.1949 0.5235 0.2829 -0.3974 0.1864 2 3 1 [ln(w /w)] 0.0009 0.0076 0.7203 0.5472 0.0013 0.0081 0.7209 0.5566 0.0011 0.0077 0.7203 0.5472 2 1 3 1 ln(w /w) ln(w /w) -0.0017 0.0076 -0.5471 0.3047 -0.0020 0.0081 -0.5461 0.3052 -0.0018 0.0077 -0.5471 0.3047 1 3 1 lny ln(w /w ) -0.1552 0.0247 -0.9181 0.8483 -0.1556 0.0251 -0.9170 0.8477 -0.1554 0.0248 -0.9181 0.8483 2 1 ln(w /w ) -0.5457 0.3055 0.1975 0.0441 -0.5458 0.3085 0.1964 0.0452 -0.5458 0.3063 0.1975 0.0441 2 2 1 [ln(w /w)] 0.0021 0.0081 0.7496 0.5642 0.0023 0.0087 0.7498 0.5651 0.0022 0.0083 0.7496 0.5642 1 2 1 lny ln(w /w ) 0.1622 0.0269 0.1997 0.0421 0.1623 0.0272 0.1993 0.0426 0.1623 0.0270 0.1997 0.0421
2
( , ) (1.88 , 1.66) (1.35 , 0.83) (1.63 , 1.24)
( N , T ) = (200, 6) Model A Model B Model A Model B Model A Model B
Bias MSE Bias MSE Bias MSE Bias MSE Bias MSE Bias MSE
3 1 ln(w /w ) 0.6314 0.4391 -0.3838 0.3063 0.6342 0.4613 -0.3847 0.3769 0.6325 0.4458 -0.3842 0.3260 2 3 1 [ln(w /w)] -0.0003 0.0184 0.7112 0.6546 0.0004 0.0226 0.7145 0.7277 0.0001 0.0196 0.7125 0.6755 2 1 3 1 ln(w /w) ln(w /w) 0.0003 0.0181 -0.5413 0.3237 -5.45E-06 0.0219 -0.5389 0.3356 0.0001 0.0192 -0.5404 0.3269 1 3 1 lny ln(w /w ) -0.1877 0.0384 -0.9113 0.8611 -0.1886 0.0402 -0.9080 0.8685 -0.1880 0.0390 -0.9100 0.8626 2 1 ln(w /w ) -0.6563 0.4722 0.1914 0.0661 -0.6566 0.4904 0.1884 0.0782 -0.6565 0.4774 0.1903 0.0695 2 2 1 [ln(w /w)] -0.0002 0.0201 0.7459 0.5689 -0.0005 0.0244 0.7469 0.5762 -0.0002 0.0213 0.7463 0.5712 1 2 1 lny ln(w /w ) 0.1948 0.0412 0.2014 0.0523 0.1951 0.0428 0.1998 0.0571 0.1949 0.0417 0.2008 0.0536 2 ( , ) (1.88 , 1.66) (1.35 , 0.83) (1.63 , 1.24)
( N , T ) = (200, 10) Model A Model B Model A Model B Model A Model B
Bias MSE Bias MSE Bias MSE Bias MSE Bias MSE Bias MSE
3 1 ln(w /w ) 0.5261 0.2911 -0.3955 0.2086 0.5274 0.3000 -0.3955 0.2355 0.5265 0.2936 -0.3955 0.2157 2 3 1 [ln(w /w)] 0.0008 0.0083 0.7221 0.5714 0.0013 0.0099 0.7230 0.6002 0.0010 0.0088 0.7224 0.5792 2 1 3 1 ln(w /w) ln(w /w) 0.0003 0.0084 -0.5484 0.3112 -0.0005 0.0097 -0.5456 0.3135 0.0000 0.0087 -0.5473 0.3114 1 3 1 lny ln(w /w ) -0.1563 0.0256 -0.9162 0.8497 -0.1566 0.0263 -0.9137 0.8503 -0.1564 0.0258 -0.9153 0.8494 2 1 ln(w /w ) -0.5441 0.3102 0.1974 0.0488 -0.5444 0.3174 0.1946 0.0528 -0.5442 0.3122 0.1963 0.0498 2 2 1 [ln(w /w)] -0.0013 0.0094 0.7488 0.5648 -0.0006 0.0109 0.7493 0.5678 -0.0010 0.0098 0.7490 0.5657 1 2 1 lny ln(w /w ) 0.1615 0.0272 0.1989 0.0435 0.1617 0.0278 0.1982 0.0454 0.1616 0.0274 0.1986 0.0440
2
( , ) (1.88 , 1.66) (1.35 , 0.83) (1.63 , 1.24)
( N , T ) = (200, 20) Model A Model B Model A Model B Model A Model B
Bias MSE Bias MSE Bias MSE Bias MSE Bias MSE Bias MSE
3 1 ln(w /w ) 0.4047 0.1674 -0.4005 0.1729 0.4054 0.1695 -0.4010 0.1792 0.4049 0.1680 -0.4007 0.1745 2 3 1 [ln(w /w)] -0.0007 0.0036 0.7215 0.5323 -0.0011 0.0039 0.7224 0.5395 -0.0008 0.0037 0.7218 0.5343 2 1 3 1 ln(w /w) ln(w /w) -4.81E-05 0.0037 -0.5495 0.3044 0.0004 0.0039 -0.5497 0.3056 0.0001 0.0037 -0.5496 0.3047 1 3 1 lny ln(w /w ) -0.1199 0.0147 -0.9208 0.8503 -0.1201 0.0148 -0.9209 0.8515 -0.1200 0.0147 -0.9209 0.8506 2 1 ln(w /w ) -0.4240 0.1835 0.2002 0.0424 -0.4243 0.1852 0.2003 0.0434 -0.4241 0.1840 0.2002 0.0426 2 2 1 [ln(w /w)] 0.0007 0.0039 0.7501 0.5636 0.0002 0.0042 0.7502 0.5642 0.0005 0.0040 0.7501 0.5638 1 2 1 lny ln(w /w ) 0.1258 0.0161 0.1997 0.0408 0.1258 0.0162 0.1995 0.0412 0.4049 0.1680 -0.4007 0.1745
Although both Models A and B perform reasonably well, the simulation results
appear to be in favor of an advantage for Model A in general and for the estimation of
TE scores in particular (see Tables 7 and 14 below). Comparing (3-13) with (4-1), one
can tell that their disparity originates from how and lnG are estimated. For nt Model A, they are estimated by NISUR viewing parameters contained in lnG as nt
unknown, while for Model B lnG is replaced by nt lnGˆnt leaving to be
estimated by OLS. The superiority of Model A may be explained by its allowance for
the presence of lnG in the expenditure equation. nt
It is apparent from Table 4 that Model C gives rise to undesirable estimators of
( ,2, ). This is mainly ascribable to the fact that it overlooks Step 3 and proceeds from Step 2 directly to Steps 4 and 5. By doing so, the residual of (4-2) is indirectly
derived using the NISUR estimates of lnGˆnt and ˆ , which are obtained by
simultaneously estimating the (J 1) share equations, instead of the expenditure equation. Conversely, the residuals of (3-13) and (4-1) corresponding to Models A and
B, respectively, are directly deduced from estimating the expenditure equation. Step 3
is thus necessary.
We have learned from Tables 2 and 3 that the parameter estimates of the
parametric part of the cost function obtained in the first step outperform those
obtained in the third step. These estimates are applied to compute lnG . We now nt
compare the performance of the estimated lnG to gain further insight into the nt
properties of alternative models. Not surprisingly, G1 has smaller biases and MSEs
than G2A and G2B, derived from Models A and B, respectively, in almost all (N, T)
and (2,) combinations. The outcomes support the use of G1 as the estimate of lnG . nt