THE PROFILE MINIMIZATION PROBLEM IN
TREES* DAVID KUO ANDGERARDJ.CHANGt
Abstract. Theprofileminimizationproblemis to finda one-to-onefunctionffrom thevertex setV (G)of a graph Gtothesetof all positive integers such that
xeV(G)
{f(x) minyN[x]f(y)}isassmallaspossible, where N[x] {x}t3{y yisadjacenttox} isthe closed neighborhood ofx inG. Thispapergivesan O(n1"722)timealgorithm for theproblemina treeofnvertices.
Keywords,sparsematrix, profile,labeling,tree,leaf, centroid, basicpath,algorithm AMSsubject classifications. 05C78, 05C85, 68R10
1. Introduction. The profile minimizationproblemwas introducedby [5], [6]asa tech-nique for handlingsparsematrices. Forinstance,inthe finite element method[8],[9],we want tosolve a system oflinearequations
Ax
b whereA
is asparse symmetricn n matrix.Suppose
for each rowi,aii 0 andPi isthe position of the first non-zero element in this row.Wecall
UO Pi min{j aij
0}
the width of rowi,and call
n
P(A)
Z
11)ii=1
the profile ofmatrixA. Tostore
A,
weneedonlystoreL0 J- elements in eachrow i,which are from positionPi topositioni. The totalamountof storage for this schemeisthenP(A)
+
n.In orderto reduce theamount of storage, we needonly permute the rows and columns of
A
simultaneouslysuch that the resultingmatrixhasminimumprofile, i.e., weneedtofinda permutation matrixQ
such that theprofileP(QA
Qt)
isminimized.Wecanreformulate thisproblemin termsofgraphs. Associatethe matrix
A
withagraph G such thatV(G)
{v,/)2
On}
and E(G) {(1)i,l)j)
:/:
j andaij0}. Note
thatP(A)-
wi
-(i-i=1 i=1
min
j)
vjEN[vi]
where N[vi] {1)i} I,.J
{1)j
l) is adjacent tovj}
is the closed neighborhood of 1) in G.The row and column permutation
Q
corresponds to a one-to-one functionf
fromV(G)
onto {1,2n}
andP(QAQ
t)
yxEv(6)
(f
(x)minyENtxl f(Y)).
Thismotivatesthe definitionof the profile of agraphgiven below.Fortechnicalreasons, however,weshall giveaslightlymoregeneraldefinitionthan that described inthe previousparagraph. A labelingofagraph Gisaone-to-onefunction
f
from thevertex set V(G)
tothesetof all positive integers.A
labelingis simple ifitmapsV (G)
onto{1,
2V(G)I}.
Foralabelingf,
theprofile-widthof avertexx isdefined aswf(x)-
f(x)-
min f(y).yEN[x]
*Receivedbythe editors March 11, 1991"acceptedforpublication(in revisedform) July30, 1992. This work
wassupportedin part by theNational ScienceCouncil oftheRepublicofChinaunder grant NSC79-0208-M009-31. Institute ofAppliedMathematics, National ChiaoTungUniversity,Hsinchu30050, Taiwan, Republic of China
(gjchang@cc. nctu. edu.tw).
71
The profile
of
Gwithrespecttof
isPu(G)
Z
wf(x)
xEV
andthe profile ofGis
P(G) min{
Pf(G)
f
isalabelingofG}.
A
labelingf
isoptimal ifPf(G)
P(G).
Thepurposeofthispaperis tostudytheprofileminimizationproblem, i.e., theproblem
ofdeterminingthe profile
P(G)
of agraphG,
fromanalgorithmicpointofview. The profile minimization problem is analogous to the linear arrangementproblem, which is to find a labelingf
ofa graph G such that’{If(x)
f(Y)l
(x, y) is anedgeinG}
is minimized(see [1],[3],[7]). Reference[5] provedthat theprofileminimizationproblemisequivalentto theproblemofintervalgraphcompletion,whichis knowntobeNP-completeevenwhenGis stipulatedtobe anedgegraph (see [4]). Themainresult of thispaperistogive an O(n
1"722)
timealgorithmfor theproblemwhen Gis a treeofnvertices.
Therestof thispaperisorganizedas follows.
In 2,
weestablish severalbasicpropertiesthat motivate the developmentof our algorithm.
In
particular, we provethat for a treeT
thereexistsabasicpath c(x, y)suchthatP(T) P(T -or(x, y))
+
IE(T)I.
Sotheproblembecomes that of finding apathc(x, y)such that
P
(T-or(x, y))is minimized. Forthepurposesof recurrence,wealsointroducetheproblemof findingapathc(x, y)such thatP(T-ot(x, y))
is minimized,withtheboundaryconditionthatyisfixed.
In
ordertodeterminethe basicpath,3
developstheoremsthatnarrowthepossibilitiesforthe basicpath. Forinstance, weprovethatc(x, y)containscentroids of thetree. Thisalso means that the number ofverticesofeach component ofT ot(x, y)isnomorethanhalf the numberof vertices of
T.
This isimportant in determining thespeedofourrecursive algorithm. Section4 uses these resultstodesign an algorithm, and5
analyzesthe timecomplexityof thealgorithm.2. Motivating properties. This sectionshows theexistenceofabasicpathc(x, y)such that P(T)
P(T
a(x, y))+
IE(T)I
andintroduces theproblemoffinding aminimum suchpathwiththeboundarycondition thatyis fixed. The followingpropertiesareobvious and theirproofsare omitted.PROPOSITION 2.1.
An
optimal labelingof
aconnectedgraph GmapsV (G)ontoasetof
consecutiveintegers.
PROPOSITION2.2([5]).
If
His asubgraphof
G,thenP(H)
<P(G).
PROPOSITION2.3 ([5]).
If
G has m componentsG1,G2
Gm,
thenP(G)
Eim=l
P(Gi).
We can in fact assume that an optimal labeling ofa graph is simple even ifit is not connected.
Suppose
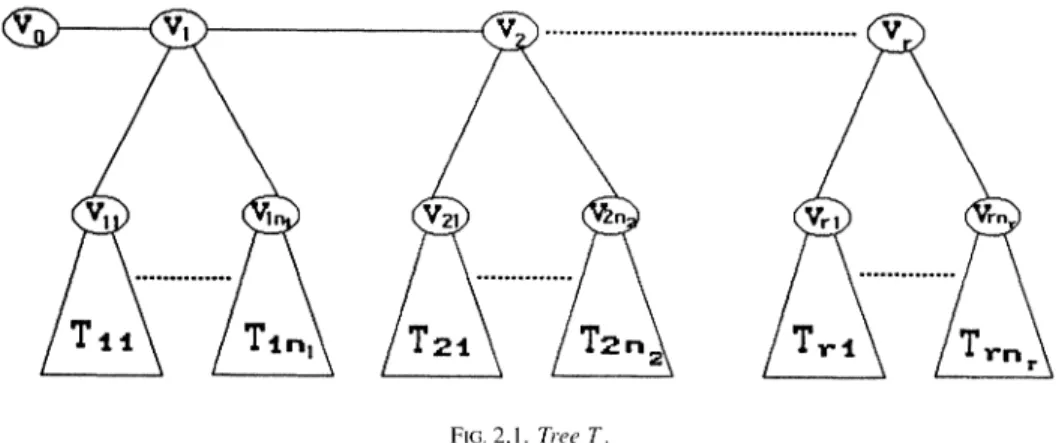
T is atreeofn vertices. For anyleaf x andanyvertexyinT,
consider the unique (x, y)-path c(x, y) (v0,vl vr),where v0 x andvr
y.Suppose
thatforeachi, < < r,T c(x, y)hasn components Til, T/2
Tin
eachwith a vertex vii adjacentto vi in T (seeFig.2.1).Let
f
be anoptimalsimple labeling ofF/
tO<_j<_niTij.
We
consider asimple labelingfxy
definedbyfxy(1))
Ly(Vi_I)
+
J(/))
Ly(Ui-1)
-"
IV(F/)I+
ifv v0,
ifv 6 V(Fi), ifv vi.
SeeFig. 2.2 foranexampleof
fxy
withoe(x,y) (a, b,c,d). Notethat the numbersbeside thevertices are theirlabels. Thenand
w./..,.(vo) 0,
w,.;,.(v)
fx(V)
fxy(V_)
-IV(F,.)I+
forl <i _<r,forv V(F,-).
Consequently
(2.1)
Wecalloe(x,y)thebasicpath(with respecttothe labeling
fy).
Notethatfxy(Vo)
<Ly()l)
<"" <Ly(Vr)-
n. In general,an optimal labeling ofa tree isofthistype.FIG. 2.1. Tree T.
THEOREM2.4.
If
f
isanoptimal labelingof
a tree Tof
n vertices, thenf
.Ly
where xf-
(1)isaleaf
andyf-
(n)isadjacentto at mostonenon-leaf
vertex.Proof.
Let oe(z, u) (vo,Vl v) be a longest path containingboth x and y, say,x
v
andy vt for 0_< s < _< r. Notethatsinceris the maximum,v0and v,.areleaves. Inthis casen
0 andPU:,,
(T)PJi,,,
(T),whereu’
v,._.Suppose
T and oe(z,u) are as shown inFig. 2.1. Letfj
f[v(r/)
be the labelingf
restricted onV
(Tij).
Then,bydefinition,(2.2) P(T)
Pu(T)
>wf(vi)
+
i=0 i=! ./’=1
2(
1 1Tll
T2
Ta
1 7 8 13T
FIG. 2.2.An exampleoffy.Note
that(2.3)
Wf(Ui)
Wf(Ui)
>{f(vi)
f(vi-1)}
nIE(T)I.
i=0 i=s+l i=s+l
Consequently, by(2.1), (2.4)
ni
P(T) >
IE(T)I
+
P(Tij)-
PL.(T)
> P(T).i=1 j=l
Therefore, allinequalitiesin(2.2)to
(2.4)
areequalities. Thisimpliesthe following:(1)each
fj
isanoptimallabeling forT/j,
(2)
wf(vo)
wf(Vl)
tof(Vs)
O,
(3)
Wf(l)t+l)
//)f(l)t+2)
Wf(Ur)
O, (4)f(vi-1)
minyeN[vi]
f(y)fors+
< < t.Statement (2) impliesthats 0, otherwise
wf(Vs-1)
f(vs-1)
f(Vs)
> 0. That is, x z, whichisaleaf. Statement(3)
impliesthatr < t,otherwise eitherf
(vt+ >f
(vt+2)
or
f(vt+l)
<f(vt+2),
i.e., eitherWf(1)t+l)
> 0 ortof(vt+2)
> 0. Soeithery uoryu’.
In
the former case,y uisaleaf.In
the latter case,yu’
is adjacentto at mostonenon-leaf vertex, otherwise we can choose alonger c(z, u). Inthiscase, sincePfz,,
(T)Pfz,
(T),wereplaceuby
u’
and assumey u.Note
that in this casenr
>0.So,
nowcg(x,y) or(z,u). Finally,statement(4) impliesthefollowing"(5)
f
(vo) <f
(v) <... <f
(Vr)"--n, (6)f
(vi-1) <f
(vij)
for < < rand < j <hi.Onthe otherhand,statement(1)andProposition2.1 imply that each
f(V (Tij))
contains consecutive integers. Fromthis,togetherwith statements(5)
and(6), weobtainf
fz,
fxy"
[-]COROLLARY2.5. For anytree
T
thereisanoptimal labelingfxy
inwhichboth x andyareleaves.
From
now on, alloptimal labelingswe consider are as specifiedinCorollary 2.5. Thepath a(x, y)iscalled a basicpathfor
P(T).
Theorem2.4 and
(2.1)
tell us that in ordertofindthe profile of atreeT
we needonlyfind a basicpathct(x, y) whose deletionresults in a forest with the smallestpossible profile.For
technicalreasons, we now consider thefollowingrestrictedpathdeletionproblem.Suppose
yis a fixedvertexintreeT;
find apathot(x, y) endingatysuch thatP (T
ct(x, y)) isminimum. WeuseP’(T,
y)todenote this minimumvalue.We
also calla(x, y)the basicpathfor
P’
(T, y).Suppose
fxy
isanoptimal labelingofT
andthetreeT
is asshown in Fig. 2.1.Denote
byk
T
(respectivelyT
k)
the subtree ofT
that containsv0,vl vk,F1
Fk
(respectively vk vr,Fk
Fr).From
Theorem 2.4 and(2.1),we obtainthefollowing corollary.COROLLARY2.6. Forabasicpath (vo,Vl v)
for
P(T),thefollowinghold: (1) (vo, Vl Vk) is a basicpathfor
P’(kT,
vk) andP’(kT,
vk)Eki__l
P(Fi)Ei=,
Y.=,
P(Tij)
for
1 <k < r.(2) (vk, vk+l
v)
is a basicpathfor
P’(T
,
vk) andP’(T
k,
vk)
.i=k
P(Fi)Ei=
ET-_,
P(T,.)
for
1 <_ k <_r.t-1
(3)
P(T) --IE(T)I
+
P’(ST, vs)
+
P’(T
vt)+
i=s+l
P(Fi)for
<s < <_ r.PROPOSITION2.7.
P(T)
<P’(T,
y)+
IE(T)lfor
anyvertexyinT.
3. Maintheorems. This sectiondevelopstheoremsthat restrict thepossibilitiesof the basicpathsforP(T)and
P’(T,
y).In
particular, the basicpath or(x, y)forP(T)containsthe centroidsofT. We
alsoprovethat the basicpathforP’(T, u)
iseitherct(x,u)
oror(y,u),and the deletion of the basicpathforP’
(T,u)fromT
results inaforest each of whose components hasat most21V
(T)I/3
vertices. These results arethekeystoneof our algorithm for theprofilemaximizationproblem.
A
centroid of atreeof n vertices is avertexwhose deletion results in a forest each of whose components hasat most/
vertices.It
iswell known that atreehaseitherexactlyone centroidorexactlytwoadjacent centroids(see[2]).
A"from leavestocenter"method can beemployedtoderivethe centroids of atree. Thismethod requires linear time.
THEOREM3.1.
Any
basicpatht(x, y)for
P (T)
containsall centroidsof
T.
Proof.
Suppose
thereisa centroid ofT
notin the basicpathor(x, y) (x l)1,u,
v
y).Then
T
isof the form shown inFig. 3.1,withIV
(T’)I
>_n/2
where nV (T)1.
By
Corollary2.6(3),wehave
(3.1)
k
P(T)
IE(T)I-t-
P’(T1,
1)1)-’
P’(T2,
v2)+
E
P(T/)+
P(T’).
i=3
Up
toasymmetric argument,wemayassumethatIV(T1)I
IV(T2)I. Let
a(z, v)be a basicpathfor
P(T’).
Corollary2.6(3)
andProposition2.2give(3.2)
P(T’)
>IE(T’)I
+
P’(Ta,
a)+
P’(Tb,
b)+
Z
P()"
j--1
We
also assumethatIV
(Ta)l-<
IV
(T6)I.Now
considerthelabelingfry
forT.
By
(2.1)andCorollary2.6, we have
(3.3)
k
Pfoy(T)
--IE(T)I
+
P’(Tb,
b)
2r-P’(T2,
/)2)-
P(Ta) 2t-y
P(Fj)
+
P(T1)+
P(Ti).j=l i=3
Equations (3.1)to(3.3)togetherleadtothat
E T’)
<P
Ta
P’
Ta
a+
PTI
P’
T
v ThenIE(T’)I
<IE(Ta)I
q-IE(T)[
byProposition 2.7. ThusIE(T)I
>IE(T’)I-
IE(Ta)I
>
IE(T’)[/2
(sinceIE(Ta)I
<_ IE(Tb)I andT’-
(Ta t3Tb)5
0)
> (n--IE(T’)I)/2
(sinceIE(T’)[
>_n/2)
>_
IE(T)I
(sinceIE(T1)I
_<IE(T2)]),
which is a contradiction.
FIG. 3.1.
Similararguments leadtothefollowingtheorem.
THEOREM3.2.
Suppose
yisafixed
vertexof
atree Tof
n vertices. Forany basicpathot(xy)
of
P’
(T, y),every componentof
T ot(x, y)hasat most2n/
3vertices.Proof.
The proofofthis theorem isexactly the same as that for Theorem 3.1, except now we assumeIE(T’)I
>2n/3
andIE(Ta)I
<IE(Tb)[,
and there isno assumptionthatIE(T1)I
<IE(T2)I. However,
westillhaveIE(T’)I
<IE(Ta)I
+
IE(T)I.
ThenIE(T1)I
>_IE(T’)I-
IE(Ta)I
>_
IE(T’)I/2
(sinceIE(T)I
_<IE(T)I)
> n-IE(T’)I
(sinceIE(T’)I
>2n/3)
>_ IE(T)I,
whichis acontradiction.
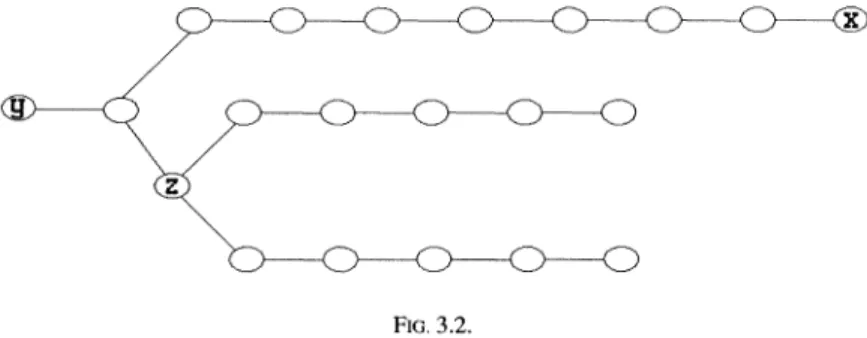
Figure3.2 givesanexampleinwhich abasicpathcg(x,y) for
P’(T,
y)doesnotcontain thecentroid zofT.FIG. 3.2.
THEOREM3.3.
If
ot(x, y)isabasicpathfor
P(T)andu is afixed
vertexinT,theneitheror(x, u)oror(y,u) is abasicpath
for
U(T,
u).Proof.
Suppose
or(x,y) (x vl, ul, v2 y) and (u,u2 Ur u) is the uniquepathfromc(x, y)tou, as shown inFig. 3.3. Let or(z, u)beabasicpathforP’(T,
u).FIG.3.3.
Case 1. z V(Tx).
In
thiscase,us
u,v3 v, andTz
Tx.
By
Corollary2.6 (1), or(x,v)isabasicpathforP’(Tx,
Vl), andsoP(Tx or(x, vl)) < P(Tz c(z, v3)). ThenP’(T, u)
P(T or(z,u))
P(Tz -or(z, v3)) q-
P(Ty)
q- P(Fi)i=1
> P(Tx -or(x, v))
+
P(Ty)
+
P(Fi)i=1
P(T o(x,
u)).
Hence c(x, u)isalso a basicpathfor
P’(T,
u).Case2. z V
(Ty).
By
asimilarargument, or(y,u) isalso a basicpathforP’
(T, u).78 DAVID KUO AND GERARD J. CHANG
Case3. z V(Tx) andz
T(Ty).
Let
T’,
T",
andT’"
be subtrees,asshowninFig. 3.3.Note
thatinthe caseofs 1,T’
Tx
tOTy
is notatree. Now(3.4)
P(T -a(z, u))P’(Tz,
v3)+
P(T’)
+
_
P(Fi).i--s
Note
thatP’
(Tz, v3) P (Tz a(z,v3)).By
Proposition 2.2,wehave(3.5)
s-1
P(T’)
>_ P(T)+
P(Ty)
+
_
P(Fi).i--I
Sincect(x, y)is a basicpathfor P(T),wehave
Pfxz(T)
>efxy(T).
By
(2.1)andCorollary 2.6 (3)wehave(3.6)
IE(T)I
+
P(Tx -or(x, Vl))+
P(Ty)
+
L
P(Fi)+
P(T")
+
P(Tz -or(z,v3))i=1
>
IE(T)I
+
P’(Tx,
v)+
P’(Ty,
v2)+
P(F)+
P(T"’).
NotethatP’(Tx,
vl) P(Tx or(x, vl)). Again, by Proposition 2.2,(3.7)
P(T’)
>L
P(F)
+
P(Tz)+
P(T").
i=2
Equations
(3.4)
to(3.7)
togetherleadtoP(T -a(z,
u))
>P’(Ty,
/32) q-P(Tx)+
P(Fi)+
P(T) P(T -or(y, u)).i--1
Hence
ct(y, u)isa basicpathforP’(T,
u). ]4. Thealgorithm.
We
can usethe theorems in3
todesignanefficientalgorithmfor theprofileminimizationproblemin atree
T.
By
Theorem3.1, the basic idea of ouralgorithmis tofind a centroidzfirst in linear time.Suppose T
z tO<i<mTi, whereu;istheonlyvertex ofT,.
that isadjacenttozinT
(see Fig.4.1). To
useCorollary 2.6(3), weneedto findallFIG. 4.1.
profilesP(T/) and
P’(T/,
ui)recursively. Inthe following,Algorithm PROFILEfindsP(T)and AlgorithmPROFILE1 finds
P’(T,
u).Note
that, in ordertomake use of Theorem 3.3, AlgorithmPROFILEnotonlyhastooutputthe valueP(T)but alsoabasicpath.ALGORITHMPROFILE
Input: A
treeTofnvertices.Output: A
basicpath c(x, y) (v0, v, ,1)r) for P(T) and thevalues P(T) andP(Tij)
for 1 < < r- and <_ j <hi. Method:
1. findacentroidzofT.
2. letT z
U
<k<mTk
andzbe adjacentto uk V (Tk)for < k < m.3. foreach 1 < k < m,recursively callPROFILEfor
Tk
togetabasicpath ot(xk,Yk)
and values P(Tk)and
P(Tkij),
whereTki
j arethecomponentsofTk
ot(Xk,Yk).
4. for each < k < m, recursively call PROFILE1 for (Tk, Uk) to get a basicpath c(zk, uk) andvalues
P’(Tk,
uk)andP(Tij),
whereTi
jarethe components ofTk
(z,u).
5. let
P(T)
n+
minl<_p<q<_m{P’(Tp, Up)
+
P’(Tq,
Uq)
-+-
Zip,q(Ti)},
wherep* andq*attainthe above minimum.
6. letc(x, y)
ot(Zp,,
Up,)
+
z+
ot(Uq,, Zq,).
7. combineprofiles
P(Tp,
ij),
P(T,)fork:
p*, q*,
andP(Tq,ij)
togetprofilesP(Tij).
To find
P’(T,
u),wenotethatbyTheorem3.3,eitheror(x,u) orc(y,u) is abasicpathfor
P’
(T, u). Sowe considertheconfigurationinFig. 3.3 withTz
omitted.ALGORITHM PROFILE
Input:
Tree T ofn vertices with a basicpathc(x, y) (v0, Vl Vr) for P(T) and thevalues
P(Tij)
for 1 < < r and < j < ni. uis afixedvertexin T.Output: A
basic path or(z, u)(Vo,
v’
V’r,)
forP’(T,
u) and the valuesP’(T,
u) andP(Ti.
)forl <i <r’andl <j<ni. Method:1. identifythepath (u,u2 Ur)asinFig.3.3.
2. recursively use PROFILE to solve P(Tx),
P(Ty),
P(Fi) (in factP(Tij)
for eachcomponentin Fi)for < < r.
3. a
P’(Tx,
v)+
P(Ty)
+
Yi=
P(Fi),b
P’(Ty,
l)2)+
P(Tx)+
Yi=,
P(Fi),where
P’(Tx,
v)andP’(Ty,
1)2)canbecomputedfrom the input valuesP(Tij).
4.
P’(T,
u) min{a,b}.
ifa <b thenz x elsez y.
5. combine part of theprofiles
P (Tij),
PTx
),orP(Ty),
andPFi
toget profilesP(T,.}).
5. Time complexity. This section shows that the timecomplexities of the above two algorithms areO(n1"722).
Let
f(n)
(respectively, g(n))be thetimecomplexityforAlgorithm PROFILE (respectively, PROFILE1).In
Algorithm PROFILE,Step
3 (respectively, 4)needsYim__
f(ni)
(respectively,Yim__
g(ni)) time, wheren V
(T
i)[for1 < < m. All other steps need O (n)time. Notethat forStep
5 weonlyhave to find the smallest and the second smallest values ofP’(Ti, wi)P
(Ti).Therefore (5.) m
f
(n)
Z{f
(ni)+
g(ni)}+
cn, i=1 wherem
E
ni n and ni <n/2
fori=1
l<i<m.
Similarly, inAlgorithm PROFILE1,
Step
2 needszim___l
f(ni)
timeand all other steps needO(n)
time. Thus,byTheorem3.2,m
(5.2)
g(n)f
(ni)+
c2n, i=1 where mZ
ni n and ni2n/3
for i=1 l<i<m.To
solve(5.1)
and(5.2),we firstchoose a numbercr > 1, whichisverycloseto 1,say,cr 1.001. Then choose <) < 2 such that
e=
+
<1and
6= (1
+
o-e)2()
x
Note
that a simple computerprogram givesthat)v 1.722forr 1.001.THEOREM5.1. Thereexists a constantcsuch that
f
(n) < cn andg(n) < ctrenfor
all n, i.e.,f
(n) O(n)
andg(n)O(nX).
Proof.
Theproofisbyinductionon n. Assumethat there exists a constant csuch thatf(n’)
< cn’
andg(n’)
< cren’z for alln’
< n.We
also assume thatc >Cl/(1
3) and>
C2/(0"
1).
For0 < a _< b, consider the function
h(x)
(b+
x)+
(a x) b a where 0 < x < a.Note
thath’(x)
,k(b+
x)-
,k(a x)-
>O. So his anincreasingfunction and thenh (x) > h (0) 0 for 0 <x < a. Thusb+aZ<(b+x)+(a-x)
for O<x<a<b.By
(5.1)and the inductionhypothesis,wehavef(n)
< c(1+
re)’im=l
n}
+
clnwhereYi=I
n
_<i=
ni n 1 and ni <n/2
for 1 < < rn Repeatedlyapply(5.3)
togetn
);k n
(7)
+
(7
1)
z.
Thereforef(n)
<_ c(1+
r)2(
+
cn
c3n+
c,n.By
the choice ofc,cn
< c(1 -6)n < c(1-6)n
z.
Thenf(n)
< cn.
m m
By (5.2)
and the inductionhypothesis,wehaveg(n) < c-,i=
nczn
wherei=1
ni < n 1 andni <2n/3
for 1 < < rn. Repeatedly apply(5.3)
togetY.i=
n
<(2n/3)
z+
n Also,bythe choice of c,czn
<_ c(1)n
< c(r 1)nz.
Theng(n) < cen+
c(cr 1)en caen.
Acknowledgments.
We
thank thetwoanonymousreferees formanyusefulsuggestionsonthe revision of thispaper.
REFERENCES
[1] D.ADot,ISOrq,NDT. C.Hu,Optimal linear ordering,SIAMJ. Appl.Math., 25(1973), pp.403-423. [2] F. BucKIEArqDE HARAR,Distance inGraphs, Addison-Wesley, Reading,MA,1990.
[3] E R. K.CHtJtqG,Onoptimallinear arrangementsoftrees,Comput.Math.Appl.,10(1984), pp.43-60. [4] M. R. GAREArqDD. S.Jonrqsorq,Computerand Intractability: AGuidetotheTheoryofNP-Completeness,
Freeman, SanFrancisco,CA,1979.
[5] Y. LINhYDJ.YUAN,Profileminimizationproblemformatricesandgraphs, preprint,Dept.ofMath.,Zhengzhou University,People’s Republicof China, 1990.
[6]
,
Minimumprofileofgrid networksin structureanalysis,toappear.[7] Y. SHIIOACH, Aminimumlinear arrangementalgorithmforundirectedtree,SIAM J.Comp.,8(1979), pp. 15-32.
[8] R.P.TWAgSON,SparseMatrices,AcademicPress, NewYork, 1973.
[9] O.C.ZmyIinwicz,FiniteElementMethodinEngineering Science,McGrawHill,London, 1971.