國
立
交
通
大
學
網路工程研究所
碩
士
論
文
針對路網週邊交通監控查詢探索動態扇形
Exploring Dynamic Fan Shapes for Nearby Traffic
Monitoring in Road Networks
研 究 生:林廷威
針對路網週邊交通監控查詢探索動態扇形
Exploring Dynamic Fan Shapes for Nearby Traffic
Monitoring in Road Networks
研 究 生:林廷威 Student:Ting-Wei Lin
指導教授:彭文志 Advisor:Wen-Chih Peng
國 立 交 通 大 學
網 路 工 程 研 究 所
碩 士 論 文
A ThesisSubmitted to Institute of Network Engineering College of Computer Science
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Computer Science
November 2011
針對路網週邊交通監控查詢探索動態扇形 學生: 林廷威 指導教授:彭文志 國立交通大學網路工程研究所 摘 要 在本論文中,我們首先介紹 CarWeb 系統提供的即時交通路況預測服務,該服 務針對使用者的移動行為即時的提供附近的交通路況預測。本論文著重在研究如 何有效率又精準的提供使用者最適當的資訊,我們特別將問題聚焦在交通路網上 移動的個體其連續的範圍查詢所涵蓋的路段上,為了解決這個問題,我們研究不 同參數設定下圓形和扇形範圍查詢的特性與使用者移動行為的關係,我們提出了 「動態扇形連續查詢架構」動態的改變扇型參數以有效率又不妥協系統效能的情 況下取得較有用的查詢結果,我們最後採用真實世界所紀錄的交通軌跡並實作了 廣泛的實驗以驗證該架構的適用性。
Exploring Dynamic Fan Shapes for Nearby Traffic Monitoring in Road Networks
Student: Ting-Wei Lin Advisors:Dr. Wen-Chih Peng
Institute of Network Engineering National Chiao Tung University
ABSTRACT
While people are driving, realtime traffic information on their way is informative and useful. With the prevalence of global positioning system (GPS) and portable devices, people can share and acquire traffic information by location-based applications. In this paper, we first introduce the traffic status estimation service, a location-based continuous range query application provided by the CarWeb system. The service provides users nearby with realtime traffic estimations according to their current locations and moving behaviors. This paper focuses on how to provide users with the most relevant traffic information efficiently and accurately. We emphasize the problem for objects moving on road networks requesting continuous range queries for traffic information of all road segments covered within the range. To tackle the problem, we study both circular and fan shaped range queries with different parameters comparing their coverage features with different moving behaviors of objects. We propose the Continuous Query with Dynamic Fan-Shape (CQ-DFS) framework which dynamically changes the parameters of the fan shaped range query to efficiently acquire useful traffic information without compromising the performance of the system. We conduct extensive experiments to demonstrate the effectiveness of the CQ-DFS framework using real world vehicle trajectories.
誌 謝
在前瞻資料庫系統實驗室的日子裡,學到了許多,生活過得非常充實。在研 究上曾遭遇過許多困難,但很慶幸能經由大家的協助與討論,進而順利的完成碩 士論文。 首先誠摯的感謝指導教授彭文志老師,老師用啟發式的教育方式,刺激學生 獨立思考,從發現問題、分析問題、尋找既有資源、解決問題到論文撰寫技巧, 獲益良多。除了課業以外,老師更在互動中教導我們許多人生的道理與待人處事 的應對進退,在這段日子裡,不但充實了專業與研究技能,心性也成熟了許多。 本論文的完成,亦得特別感謝鄭白樺教授與魏綾音學姊,在研究的過程中,不厭 其煩地指導與協助各個階段所遭遇的問題,並在投稿的過程中一同努力。 在實驗室的這段時間,非常感謝魏綾音學姊、洪智傑學長、江孟芬學姊、雷 伯瑞學長、廖忠訓學長的指導與協助。也非常感謝沈姿柔同學、張凱評同學、盧 俊達同學、榮芊菡同學的協助與互相扶持。此外,也要感謝柯宇倫學弟、潘依琴 學妹、許雅婷學妹、王堃瑋學弟、黃柏崴學弟在實驗室事務與口試安排的協助。 最後要特別感謝家人與女朋友的支持與包容,讓我能無後顧之憂地專心於課 業。 謹以此文獻給我摯愛的你們。Contents
1 Introduction 1 2 Related Work 5 2.1 Spatial Queries . . . 5 2.2 Continuous Queries . . . 6 2.3 Location Deviation . . . 9 2.4 Location Prediction . . . 10 3 Problem Definition 12 4 Design of Continuous Query with Dynamic Fan Shape 15 4.1 Exploring Fan Shapes for Continuous Queries . . . 154.2 Deciding Fan Shapes On-The-Fly . . . 17
4.3 Caching Overlapping Query Results . . . 22
5 Performance Study 25 5.1 Comparing Query Shapes for Different Distance Complexities . . . 29
5.2 Comparing Query Shapes for Different Angular Complexities . . . 31
5.3 Comparing Query Shapes with a Full Dataset . . . 33
5.4 Effectiveness of the Fan Shaped Range Formation . . . 34
5.5 Query Response Time Study . . . 35
5.6 Long Query Period Study . . . 36
List of Figures
1.1 A nearby traffic monitoring application for a range query. . . 2
3.1 A continuous range query Q on nearby traffic monitoring in road networks. . . 14
4.1 Comparing circular shape to wide and narrow forms of fan shapes. . . 17
4.2 Angular complexity Ac5 and distance complexity Dc5 for R = 5. . . . 19
4.3 Expanding ⟨Ac5, Dc5⟩ forming the desired ⟨Ang5, Rad5⟩ with R = 5. . . 21
5.1 Experimental results of subset 1 and 2 comparing different query shapes. . . . 30
5.2 Experimental results of subsets 3 and 4 comparing different query shapes. . . . 32
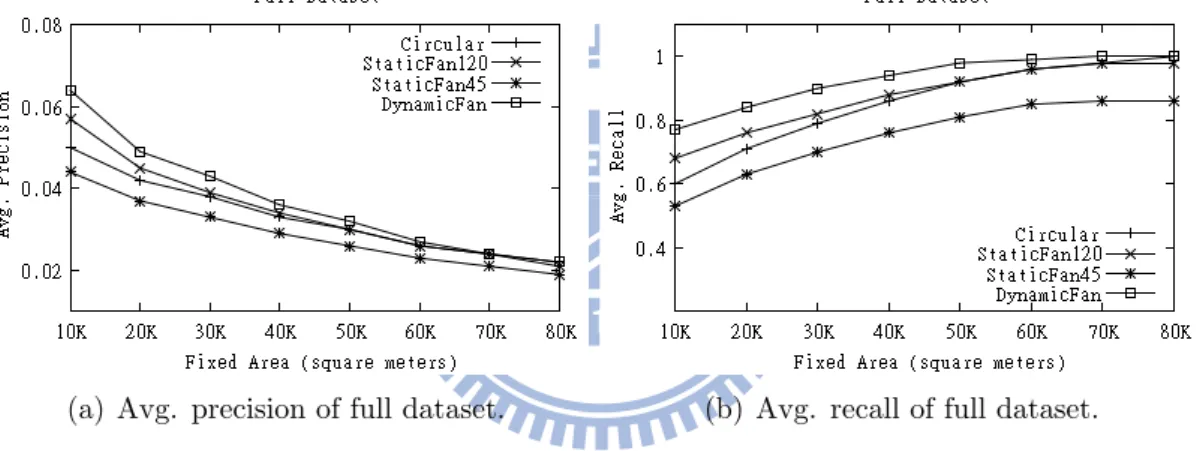
5.3 Experimental results of full dataset. . . 33
5.4 Experimental results of subsets 1 and 2 comparing different fan shaped
forma-tion algorithms. . . 34
5.5 Experimental results of subsets 3 and 4 comparing different fan shaped
forma-tion algorithms. . . 35
5.6 Average query response time results of both previous experiment sets. . . 36
Chapter 1
Introduction
With the technology advances in smart phones and positioning devices, location-based services (LBSs) are growing at a rapid speed. A wide variety of LBSs have been developed, such as cargo tracking, fleet controlling, and traffic status monitoring. The most important task in LBSs is to support spatial queries, such as range queries[32], K Nearest Neighbor (KNN) [8, 21, 37], spatial join [3, 28, 33, 34], and closest pair queries [11, 12, 20]. For example, one common query is to find the K nearest points of interest (POIs), where POIs could be gas stations, hotels, hospitals, to name a few. Consequently, the results of spatial queries include data whose geo-location should fulfill the predicate of the spatial queries.
The results of spatial queries may contain some real-time information. Note that some works solicit driving speeds from drivers and the speed data are detected by GPS devices. Prior works have explored the traffic estimation problems from speed data. Thus, another important spatial query is to provide drivers with the traffic status of nearby road segments. For example, given a spatial range as a purple circle in Figure 1.1 and a road network database, the traffic information of the roads located in the spatial range is returned as the range query result. Given a spatial range, the output of the range query is to return queried objects whose geo-locations are within the spatial range. Previous works have studied two kinds of results of range queries: one is the set of static objects whose geo-locations are always within the spatial range and the other is a set of dynamic objects whose geo-locations are updated with time. In this paper, we focus on applications of range queries with dynamic query ranges and
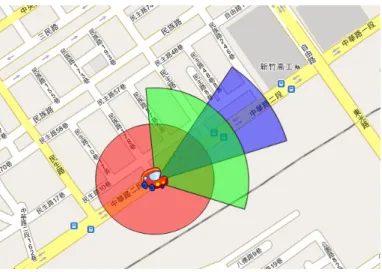
Figure 1.1: A nearby traffic monitoring application for a range query.
static objects. The objects could be POIs or road segments. For example, for nearby traffic monitoring applications of range queries, users request traffic information on road networks continuously, and then the server returns the nearby traffic status according to the users’ updated locations. If a location of a queried range is dynamically changed, the range query is called a continuous range query. In this paper, we target our scenario as applications of range queries in vehicles. Because a location of a queried range refers to the location of a vehicle, we deal with continuous range query processing in this paper.
The existing continuous range queries specify a fixed shape as a query range without considering users’ moving directions or movements. However, some query results satisfying the query range with a fixed shape would possibly be useless while users are moving. Take nearby traffic monitoring in road networks as an example of continuous range queries. The
CarWeb system has been developed as a location-based service for traffic monitoring by smart
phones [49]. When a user becomes active and starts reporting his/her locations to the server through a smart phone, the server forms a continuous range query exclusively for the user. Assume the user updates the server with his/her real-time locations periodically (e.g., once every 5 seconds) in the format of ⟨pi, ti⟩, where pi denotes the user’s location at time stamp
ti. The system treats each update ⟨pi, ti⟩ from the user as the input to form a range query.
The system then fetches all the road segments satisfying the range query and delivers the traffic information of these road segments to the user. Although the user derives his/her nearby traffic information, the traffic information behind the user would be meaningless if the user moves straight ahead. This meaningless traffic information would waste a bandwidth of communication and the computation of servers. Specifically, consider the user in Figure 1.1
as an example. Because the user moves in a northeast direction, the road segments located to the southwest of the user are useless. In order to provide users with useful traffic information, we prefer to exclude those useless road segments from the query result. In addition, assume a user reports his/her location every t seconds. Based on the user’s moving velocity v, the server can predict the distance the user moves before the next reporting time ti+ t, and then
issues a circular range query centered at pi with vj× t as the radius, i.e., the circle depicted in
Figure 1.1. The traffic status of the road segments located inside the circular range are then delivered to the user. This approach faces one major deficiency. That is, a user usually only moves in one direction, and thus a circular range covers lots of dead space whose information is absolutely of no use to the user.
To provide moving users with useful information in time for such continuous range queries, there are two major issues. The first is to specify a query range such that the query results are useful to the users. The second issue is to shorten the query response time so that users could get query results on time or before moving to other locations. Consequently, in this paper, we propose a new Continuous Query with Dynamic Fan-Shape (CQ-DFS ) framework to support accurate and real-time range queries. In addition, in this paper, we use nearby traffic monitoring in road networks as a case of this kind of range query. To quantify the performance of such range queries, the accuracy is measured via the precision and recall metrics. A relevant query result in the aforementioned example is the road segment that the user passes through in the next reporting location; and we prefer high precision and recall. On the other hand, a real-time estimation means a query result will be delivered to the user before the next location reporting, i.e., it guarantees that the response time is less than t. These two requirements are contradictory. Returning more road segments tends to provide more useful information. However, querying more road segments requires a longer response time. We could only set up an underestimated upper bound for the number of road segments covered by each range query. Consequently, the key issue is how to effectively choose a set of road segments for each range query to maximize the precision and recall under the constraint that only a limited number of road segments could be included into a range query.
For a continuous range query, our framework CQ-DFS dynamically adjusts the range of each query range in a fan-shape based on users’ movement patterns and locations on a road network. To be more specific, we take both the directions and recent trajectories of moving
users into consideration when deciding the settings of fan-shaped range queries in order to cover road segments which moving objects would pass by later. Note that a continuous range query for nearby traffic motoring in road networks has to return traffic information to a user before his/her next location reporting, i.e., a user should receive traffic estimation within
t. Consequently, the size of the range has to be appropriate since an estimation containing
too much information incurs long processing-time and long delivery time. The framework
CQ-DFS adjusts the radius/central angle of the fan-shape (i.e., circular sector) in order to
maximize the precision and recall of the estimation, e.g., users moving fast along straight trajectories prefer a fan-shape with a large radius and narrow central angle, and users moving slowly on irregular trajectories prefer a fan-shape with a small radius and wide central angle.
The three-fold contributions of this paper are summarized as follows:
• We study both circular and fan shaped range queries with different parameters
compar-ing their coverage features for different movcompar-ing behaviors of users.
• We propose the Continuous Query with Dynamic Fan-Shape framework (CQ-DFS, for
short) which dynamically changes parameters of fan shaped range query according to users’ moving behaviors for more useful information.
• We conduct comprehensive experiments to show the effectiveness of the CQ-DFS
frame-work by using real world vehicle trajectories.
The rest of this paper is organized as follows. In Section 2, we review related works about spatial queries, continuous queries, location deviation, and location prediction. Section 3 formally defines our problem. Section 4 gives details of the proposed CQ-DFS framework. Section 5 reports comprehensive experimental evaluations and Section 6 concludes this paper.
Chapter 2
Related Work
In this section, we review existing related works, including spatial queries, continuous queries, location deviation, and location prediction.
2.1
Spatial Queries
A spatial query is a type of database query that supports geographical data types such as points, lines, and polygons. In this section, we review range query, K Nearest Neighbor, spatial join, and closest pair query.
A range query refers to a spatial query retrieves the information of data objects inside a user defined 2D region. An easy representative example is finding all coffee shops within 10 miles from the user. In order to answer this kind of queries, various efficient data structures maintaining multi-dimensional geometric objects have been developed [15, 19, 31], as well as the popular R-tree [18] and its variation R*-tree [2]. [32] motivates four different user defined range query classes and derives a probabilistic model for each of them.
A K Nearest Neighbor (KNN) query refers to a spatial query that searches K data objects from a given location with the constraint that their distances between query location is the shortest compared with other data objects. KNN query is useful when the user is not familiar with the layout of data objects. One quick example is searching for 5 nearest restaurants from user’s current location. [37] presents a branch-and-bound R-tree traversal algorithm to find
KNN, and introduces two metrics that can be used to guide an ordered depth first spatial search. [8] proposes an improved nearest neighbor search algorithm on the R-tree family, and challenges a previous work that two of the three heuristics should be removed. [21] solves incremental solution to nearest neighbor problem, compared with other works developed for k-d tree, LSD-tree, and PMR quadtree, R-tree is used alternatively.
A spatial join operation is used to combine spatial objects of two sets according to some spatial properties. For example, consider the spatial relations campus and city where an attribute in each relation represents the borders of campuses and cities respectively. A spatial join query could be finding all campuses which are in a city. [3] studies spatial join query processing by using R*-trees. Comparing to pairwise spatial join query, [28, 34] studies the multiway spatial join, which involves an arbitrary number of spatial inputs. Because of the exhaustive processing nature of spatial join query processing, [33] studies the retrieval of the best possible (exact or approximate) solutions within a time threshold, in order to provide fast retrieval for applications such as multimedia information in real time systems.
A K closest pairs query (K-CPQ) combines join and nearest neighbor queries that it discov-ers the K pairs of spatial objects formed from two datasets that have the K smallest distances between them. For example, the first dataset contains cultural landmarks, and the second dataset stores popular theme parks, A K-CPQ could discover the K closest pairs of landmarks and theme parks for efficient tour scheduling. [20] presents incremental algorithms for com-puting the distance join and distance semi-join, the K-CPQ is a variation from its problem setting. [11, 12] presents a pruning heuristic and two updating strategies for minimizing the pruning distance, and designs three non-incremental branch-and-bound algorithms and one iterative Best-First traversal algorithm solving K-CPQ.
2.2
Continuous Queries
A continuous query refers to a query that runs continuously over a specified period of time, and it is usually based on a dynamic scenario in which the query point and/or the queried objects are moving. In the following, we review continuous static queries over moving objects and moving queries over static objects. First, we assume that the queries are fixed while the
queried objects are moving. For example, a shopping mall wants to send e-coupons to all the potential customers who are nearby and it can issue a continuous range of queries during weekends. This kind of query assumes that the queries are known in advance, and tries to minimize the update cost of moving objects. In [23], the authors use a continuous window (CW) algorithm to monitor moving objects with updates, and the works presented in [29, 53] adopt incremental evaluation and shared execution strategies to improve the performance. Moreover, some other works have investigated this problem based on the concept of monitoring range, including CPM [30], SEA-CNN [52] and YPK-CNN [57].
Second, we assume that the queried objects are static, while the queries are not fixed. For example, a user who is shopping on Fifth Avenue submits a query to look for a nearby ATM until she reaches one. In this case, the queried objects (i.e., ATM) are static, while the user keeps moving and hence the query point is changing continuously. A typical continuous query in this context is continuous Nearest Neighbor Search (CNN). It looks for the nearest object to the user when the user is moving. Many solutions have been proposed to support CNN search, and some representatives are reviewed in the following. In [39], a sampling technique is employed to perform normal NN searches at some pre-defined sampling points and then an approximated range is derived to bound all the possible answers. However, its accuracy depends largely on the pre-defined sampling points. In order to enable an exact search, Tao et al. devised two search algorithms for CNN queries based on an R-tree. The first algorithm is based on the concept of time-parameterized (TP) queries, which treat a query line segment as the moving trajectory of a query point [45]. The second algorithm, proposed later in [44], navigates the R-tree based on certain heuristics. The whole answer set is obtained within one single navigation of the R-tree. We would like to highlight that the above works assume the moving trajectories of mobile users are known in advance. In addition to Euclidean spaces, CNN searching in road networks (i.e., network spaces) has been studied as well. The first solution to CNN queries in road networks is proposed in [14]. Other solutions include the work presented in [9], CNN retrieval via a continuous windowing algorithm, and the beach-line algorithm [26].
In addition to CNN queries, the problem of continuous range queries is also widely inves-tigated. A continuous range query refers to a range query continuously updating the results within a certain period of time. Typically, continuous range queries consist of at least a
database server, and a large number of objects [59]. Some of them have static query ranges and dynamic moving objects, objects update their information such as locations to the server, then the server returns the information to the users who made the queries. The most common approach is making objects report their initial positions and velocity information, from which the server could estimate their future locations within a period of time. As a result, objects do not need to report their locations until the deviation between their actual locations and estimated locations exceed a threshold [50, 51, 56]. Some others have dynamic query ranges and static objects [54, 5, 58], users request their desired query region to the server, then the server responds with the information accordingly. [54] assumes the query client’s future tra-jectory is given apriori, and attempts to precompute query results in advance. [5] reports a safe region to the client in addition to the query result, so the client does not need to query again since the query results would remain the same inside the safe region. [58] employs the safe region idea, and further introduces the safe exits on road networks, where clients do not need to query again within the exits on the road network. Nevertheless, it is not a requirement for continuous range queries. For instance, [29, 17, 40] support moving queries over moving objects in server-based processing. [29] proposes the SINA that incrementally evaluates a set of concurrently executing queries. [17] introduces the concept of motion-sensitive bounding
boxes(MSBs) to model moving objects and moving queries in order to decrease the number
of updates to the indices. [40] focuses on server processing time optimization, and adopts a point-based update policy. Mobile clients update their new locations whenever they deviate from last reported locations. Apart from the central server architecture, the MobiEyes [16] and MQM [4] let mobile devices answer continuous range queries, leaving the central server as a mediator. In MQM, the resident domain is introduced as a subspace surrounding the moving object to process continuous queries. Queries are partitioned into monitor regions, where the monitor regions covered by the resident domain will be sent to the moving object. Compared to the existing continuous queries, our framework CQ-DFS is unique and dif-ferent from them because it dynamically changes the query shape according to the user’s different moving behaviors to maximize the usefulness of the range query while preserving the system performance. Being an instance of continuous range queries, CQ-DFS applies the central server architecture, and requests continuous range queries from mobile users, i.e., users request queries from their handsets when driving. The reason that CQ-DFS uses dynamic
query ranges instead of static ones is because it captures the complex moving behaviors of objects, and further adapts them on-the-fly. Fixed ranges could perform well in terms of usefulness in certain cases, but it would be impossible to achieve higher usefulness as well as
CQ-DFS does. We leave further study between CQ-DFS and fixed ranges to Sections 5.1,
5.2, and 5.3.
2.3
Location Deviation
For moving users, their locations would change with time and the difficulty of retrieving the users’ nearby information is increased. Although a server knows a user’s reported location at present, the server would have no idea about the user’s next location if he/she has not reported his/her next location after a period of time. To provide useful information for a user in time, a server has to predict where he/she will be after a period of time. Consequently, the estimated location might be different from the real one, which is clustered as location deviation related to data uncertainty or imprecise data.
In the literature, interpolation techniques have been used to determine the expected loca-tions of moving objects in-between their two consecutive GPS records [36, 13]. [47] further models uncertain moving trajectories as a 3D cylindrical body to capture the expected devia-tion. [13] narrows the uncertainty problem by restricting trajectories following road networks, and analyzes the geometry of the uncertain trajectories. On the other hand, probabilistic approaches have also been employed to handle uncertain data. [6, 7] define lower and upper bounds and probability density functions of the values inside the bounds answering queries over uncertain data augmented by probability information. [41] follows the idea and proposes the conservative functional box binding the probabilities of objects for multi-dimensional un-certain data. [10] maps the unun-certain movements to a dual space for indexing, and eliminates unqualified candidates to reduce the overall cost of query evaluations. Compared with works using interpolation techniques, CQ-DFS does not have information of future locations. Al-though they all provide a clustered region in which moving objects might appear, CQ-DFS only cares whether the next location of the moving object is covered by the range query while other works focus on discussing and analyzing the uncertain deviation regions. Compared with
works applying probabilistic approaches, CQ-DFS does not provide answers with validity but a dynamically determined fan shaped range.
2.4
Location Prediction
Location prediction frameworks predict future locations of moving objects by referencing their history trajectories. Some frameworks track a user’s most recent trajectory and predict the location after a short period of time, e.g., 5 seconds; the common navigation service is a representative example. Some other frameworks only care about rough locations and the transitions between regions. For example, say John usually leaves his office dropping by the supermarket on his way home. The transition model is formulated; thus whenever John leaves the office heading to the supermarket, it is expected with a higher possibility that he would go home afterwards. The two examples above are representatives of two common categories,
vector-based and pattern-based predictions.
Vector-based predictions have two types, linear predictions [38, 46, 35, 24] and non-linear
predictions [1, 42], which apply linear and non-linear mathematical functions to a model and derive future locations respectively. Among them, the Recursive Motion Function (RMF) [42] has the highest prediction accuracy. In RMF, location vectors of moving objects at time t are formulated as lt =
∑f
i=1cilt−i where ci is a constant matrix and f is the number of the most
recent locations used to determine the underlying motion pattern. The predictive location is derived according to the discovered motion pattern. Pattern-based predictions include the
Markov model, and association rules. In the Markov model [22], the transition probabilities
between locations are derived. It then looks at the current location and compares the transition probabilities of other locations to determine which is likely the next stop. In association rules, [43, 55, 48] model location transition and timestamp in the form (pi, ti, c) → (pj, ti+1) with a
confidence value c, where pi, pj are locations at time ti, ti+1respectively. The confidence value
c is the probability that the user is likely to move from pi at time ti, to pj at time ti+1.
Beyond both pattern-based and vector-based predictions, the Hybrid Prediction Model(HPM) is proposed [25] incorporating both association rules and RMF to achieve higher accuracy and execution efficiency. However, HPM requires extra storage to store discovered moving
pat-terns and the Trajectory Pattern Tree of each user. Compared with all of the prediction frameworks reviewed above, CQ-DFS does not actually predict a user’s future location, but estimates a fan shaped region which is more likely to cover the user’s next location. Inspired by the vector-based prediction RMF, we borrow the concept applying the most recent R loca-tions (i.e., Reference Factor ) to determine a user’s moving behaviors, and furthermore decide suitable parameters for the fan shaped range query accordingly.
Chapter 3
Problem Definition
In this section, we first define a problem of a continuous range query. Without loss of general-ity, we adopt an application of nearby traffic monitoring in road networks as a case for this kind of continuous range query in this paper. Clearly, for other LBS services that provide nearby POIs, such as hotels, gas stations, and parking lots, one could apply the proposed continuous
range query. Assume that a road network G = (V, E) is given. Each user uj drives in road
networks and reports his/her location every t seconds. Explicitly, if a user reports L times his/her own locations, the series of locations can form a trajectory. This trajectory consists of L location data points, represented by ⟨pi, ti⟩, where ti+1− ti = t, and 1 ≤ i ≤ L. In our
nearby traffic monitoring scenario, when receiving ⟨pi, ti⟩ from user uj, the server will return
the query result to the user, denoted as a set Ei with Ei ={⟨si1, vi1⟩, ⟨si2, vi2⟩, · · ·, ⟨siM, viM⟩}.
Here, each⟨sik, vik⟩ represents that the estimated velocity range of the road segment sik is vik
and vik ∈ {< 25km/hr, [25 − 50]km/hr, [50 − 75]km/hr, [75 − 100]km/hr, > 100km/hr}. For
brevity of our presentation, we ignore the unit km/hr for velocity in the rest of this paper and time ri is used to indicate the timestamp when user uj receives Ei.
In the above example, since this user has L location data points, the server will issue a range query with a given location data point and the spatial range. The spatial range is a fan shape and the fan shape will be dynamically adjusted according to the moving speed of the user. Thus, the server returns to this user L query results, expressed by ∪L
i=1⟨pi, ti⟩. For
specified and their corresponding estimated velocity ranges as a query result Ei. For each
query location point, each query result should be returned to the user before he/she moves to the next location. Thus, one would like to have a constraint on the response time of the range queries issued. In this paper, we intend to guarantee that users could receive each query result within t. In addition, the parameter τ is to restrict the maximum number of road segments retrieved. In this paper, to evaluate the performance of continuous range queries, we define two measurements, precision and recall, of the query results as follows:
Definition 1 (Precision) Given a continuous range query Q, the precision of its query
re-sult, denoted as ΩQ is defined as
ΩQ = ∑L i=2αi ∑L i=2|Ei−1| (1)
where for i∈ [2, L], αi is defined as
αi = 1 if ri−1 < ti∧ ∃⟨s(i−1)k, v(i−1)k⟩ ∈ Ei−1 such that pi ∈ s(i−1)k 0 otherwise.
Note that αi is used to indicate whether the road segment that the user passes at ti is
included in the estimation Ei−1. In addition, α1 cannot be measured because no estimation
is available at the timestamp t1 when the user reports its first position of a journey to the
server.
Definition 2 (Recall) Given a continuous range query Q, the recall of its query result,
denoted as ΓQ is defined as
ΓQ =
∑L
i=2αi
(L− 1). (2)
The scenario of nearby traffic estimation for a continuous range query is best understood by the example in Figure 3.1. We use the traffic status estimation service of the CarWeb
(a) Q1 (b) Q2 (c) Message flows
Figure 3.1: A continuous range query Q on nearby traffic monitoring in road networks. Table I: Qis and corresponding Eis.
Qi Ei ri Q1 =⟨p1, t1⟩ ⟨s11, [25− 50]km/hr⟩, ⟨s12, < 25km/hr⟩, ⟨s13, [25− 50]km/hr⟩, ⟨s14, [75− 100]km/hr⟩, ⟨s15, [50− 75]km/hr⟩, ⟨s16, [50− 75]km/hr⟩ r1(t1 < r1 < t2) Q2 =⟨p2, t2⟩ ⟨s21, [25− 50]km/hr⟩, ⟨s22, [25− 50]km/hr⟩, ⟨s23, [25− 50]km/hr⟩, ⟨s24, < 25km/hr⟩, ⟨s25, [50− 75]km/hr⟩, ⟨s26, [50− 75]km/hr⟩, ⟨s27, [75− 100]km/hr⟩ r2(t2 < r2 < t3)
system as an example. For simplicity, we assume that a user only reports his/her position three times during a journey, i.e.,⟨p1, t1⟩ shown in Figure 3.1(a), and ⟨p2, t2⟩ and ⟨p3, t3⟩ shown
in Figure 3.1(b). Accordingly, the CarWeb system issues a continuous range query Q which
contains two instances (i.e., Q1 and Q2) to estimate the traffic information that might be
useful to the user. In this example, the spatial range is a circular range. The circles centered at the user shown in Figure 3.1(a) and Figure 3.1(b) are the queried ranges, corresponding to Q1 and Q2, respectively. Accordingly, the server locates all the road segments inside the
circular ranges, together with estimated traffic status, to form E1/E2 which will be returned
to the user. The content of Eis is shown in Table I. Notice that only road segment s11of E1 is
explicitly depicted in Figure 3.1(a), and the remaining segments are ignored for presentation clarity. In Figure 3.1(c), the message flows between the user and the CarWeb system are presented.
For the performance of Q, α2 = 1 as p2 is located on the road segment s11 ∈ E1, and
α3 = 0 as p3 is not located on any road segment included in E2. For the number of road
segments covered by range queries, |E1| = 6 and |E2| = 7. Consequently, the precision and
Chapter 4
Design of Continuous Query with
Dynamic Fan Shape
In this section, we propose a Continuous Query with Dynamic Fan-Shape (CQ-DFS ) frame-work for continuous range query. First, we share some of the observations which motivate the design of CQ-DFS. Next, we explain the basic ideas of fan-shaped range queries. Then, we define two moving complexities of mobile users in the CarWeb system to facilitate the forma-tion of proper fan-shaped range queries and present the detailed query formaforma-tion algorithm. Finally, we present a caching scheme to further improve the performance.
4.1
Exploring Fan Shapes for Continuous Queries
A traditional approach for continuous range query on nearby traffic monitoring in road net-works is illustrated in Figure 1.1. Specifically, we can use a circle with a fixed radius centered at a user’s location to represent the region covering all road segments nearby. For static users on road networks, this is surely one of the best choices to set a range query. However, when users are moving, the location deviation issue arises in that moving users may go far beyond the circular range before query results are available if the circular range is not large enough. On the other hand, a very large radius of the circular shaped range can address the location
deviation issue, but may result in an estimation Ei containing too many road segments.
No-tice that a user would like to get information within a very short of period (i.e., 5 seconds in our implementation).
To provide more useful information (e.g., traffic estimation results) to moving users while preserving the system performance, the shape of a queried range is critical. To design an appropriate shape for a queried range which can maximize the precision and recall metric, we have made the following two observations. The first is that if it is predictable that a user is moving towards a specific direction, it is sure that the segments located in the opposite direction are not useful. Consequently, a query using a half circular shape as the query range is more beneficial, in terms of precision and recall under the restriction that at most τ segments could be included in an estimation. The second observation is that, while a user is moving on a certain route, the road segments within a query range may have different degrees of importance for the user. For example, if a user is moving very fast on a boulevard (say 80 km/hr), it is very likely that he/she is likely to move straight forward along the boulevard without any sudden turns. In other words, those road segments intersecting with the boulevard are less important than the boulevard itself, not to mention other road segments that are parallel to the boulevard or those farther ones. Consequently, these less important segments could be omitted in order to not violate the restriction of the maximal τ segments per estimation. However, we could not simply remove those less important segments directly from the range as it is inconsistent with the nature of range query. In addition, it is possible that the moving user would slow down and finally make a turn, so the road segments that are currently not important might become important later. The above observation suggests that when a user is moving fast, a somewhat long shape of range parallel to his/her current moving direction is preferred.
To provide moving users with useful information, we propose a Continuous Query with a Dynamic Fan-Shape (CQ-DFS ) framework. In this framework, we adopt generalized fan shapes for range queries instead of circular shapes. The idea of adopting fan shapes for range queries is inspired by our daily experience. A flashlight illuminates unseen dark areas, and the areas illuminated by the flashlight of a midnight security patrol from a bird’s-eye view are fan-shaped. Fan-shaped ranges match the dual requirements for a continuous range query. First, a moving user is situated in the center of a fan shaped range which matches the first observation
Figure 4.1: Comparing circular shape to wide and narrow forms of fan shapes.
that the road segments behind the moving user do not need to be included. Different from a circular shaped range query, a fan-shaped range query is direction aware. Second, given a fixed area of a query range, a fan-shaped form can be easily adjusted by changing the center angle and radius. For instance, a fan shape with a smaller center angle and a larger radius (i.e., a narrower fan shape) covers farther road segments ahead, while a fan shape with a larger center angle and a smaller radius (i.e., a wider fan shape) covers more nearby road segments. This easy-customization feature enables higher performance for different kinds of moving behaviors of users, as shown in Figure 4.1.
4.2
Deciding Fan Shapes On-The-Fly
To adapt our framework to different moving behaviors, we first define two kinds of moving complexities, angular complexity and distance complexity. For a movement, its speeds and route are widely used to capture its moving behavior. In addition, if we know a user’s driving direction and speed, the user’s movement can be captured. Therefore, in this paper, we define an angular complexity and a distance complexity to capture the directional changes of a movement and how far a movement is, respectively.
To capture a user’s moving behavior, we observe his/her past movements, and then for-mulate the moving complexities. First, we use a reference factor, R, to decide how many past positions are to be taken into consideration when we calculate a user’s moving complexities.
Specifically, the reference factor R is defined as the number of former locations reported by a user (i.e., pi, pi−1, pi−2, · · · , pi−R+1) that are considered when calculating the moving
com-plexity of the user at position pi. Note that for any pi such that i < R, we set R = i. Based
on a given reference factor R, the angular complexity and the distance complexity are defined in Definition 3 and Definition 4, respectively.
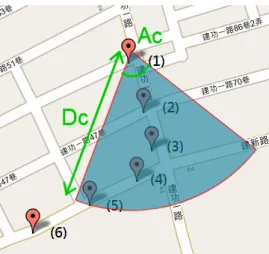
Definition 3 (Angular Complexity) Given a user located at pi and a reference factor R,
let angle ak (=∠pkpi−R+1p′) be half of the center angle of the minimal fan shape range centered
at pi−R+1 and meanwhile covering pk with k∈ (i − R + 1, i]. Here, vector
−−−−−→
pi−R+1p′ corresponds
to the direction vector at pi−R+1. The angular complexity, denoted as Aci is set to the maximal
angle ak w.r.t. k ∈ (i − R + 1, i]. Mathematically, Aci is expressed as
Aci = M AX(2· MAXk=ii −R+2∠pkpi−R+1p′, Amin). (1)
Notice that in order to prevent the case where all the aks are too small (e.g., when users
are moving along a straight line), Amin is used as the lower bound of Aci. In our default
parameter setting, we set Amin = 30◦.
Definition 4 (Distance Complexity) Given a user located at pi and a reference factor R,
distance dk(= dis(pi−R+1, pk)) is the radius of the minimal fan shaped range centered at pi−R+1
and meanwhile covering pk. The distance complexity, denoted as Dci is set to the maximal
distance dk w.r.t. k ∈ (i − R + 1, i]. Mathematically, Dci is expressed as
Dci= M AX(M AXk=ii −R+2dis(pi−R+1, pk), Dmin). (2)
Notice that Dminis used as a lower bound of Dci to prevent cases where dks are very small.
In our implementation, we set Dmin = 30m.
Figure 4.2: Angular complexity Ac5 and distance complexity Dc5 for R = 5.
numbered p1 ∼ p6 in sequence with p1 reported first and p6 reported last. Assume reference
factor R = 5, and the user is currently located at p5. To derive Ac5, we start from the location
and the direction of p1 looking for the minimum angle required to fully cover p1 ∼ p5, which
is illustrated as the center angle of the shaded angular sector. Similarly, the Dc5 is derived
starting from p1 searching for the minimum distance required to cover p1 ∼ p5, which is
showed as the radius of the shaded angular sector. The reason Ac5 is as large as Figure 4.2
shows is because the direction of p1 is considered, which is approximately south-southeast.
The shaded angular sector is the minimum angle required to cover p1 ∼ p5 assuming the user
requests a fan shaped range query from p1. Suppose the user moves to p6. It is observed that
Ac6 is much larger than Ac5. (Ac6 is derived from p2 ∼ p6, and the direction of p2 is similar
to p1’s.) The philosophy of moving complexity actually assumes that moving objects would
keep following current moving behaviors until the behaviors start to change. In our example,
the user makes a right turn during p3 ∼ p4. As a result, CQ-DFS assumes the user would
keep making turns (requiring larger Ac) until the user starts to move straight.
The philosophy of angular and distance complexities is based on the assumption that
whenever the user is moving fast on a boulevard or highway (i.e., a lower value of Ac and a
higher value of Dc), he/she would keep moving fast until gradually slowing down (e.g., leaving
the highway). On the contrary, if a user keeps wandering around the city turning left and right (i.e., a higher value of Ac and a lower value of Dc), he/she would keep doing so until
gradually accelerating (e.g., leaving the city). The moving complexities significantly facilitate the understanding of different moving behaviors of users and the real-time formation of the
queried range.
However, it is possible that when users make sudden turns, a few following range queries would have sudden parameter distortion. For example, in Figure 4.2, if the user continues
making turns at p5 ∼ p6, the parameter distortion comes in handy. Here we are emphasizing
that the changes between Ac4 ∼ Ac6 are so intense that when the fixed area of the range
query is relatively small, the range query may only return a small number of segments which definitely affect the overall precision and recall. To capture whenever users are making turns, and meanwhile to avoid distortion, we apply a weighted moving average method to smooth the angular complexity and distance complexity, as defined in Definition 5 and Definition 6.
Definition 5 (Smoothed Angular Complexity) Smoothed angular complexity SAci of pi
is defined as the weighted moving average of Aci with parameter K, i.e.,
SAci=
K· Aci+ (K− 1) · Ac(i−1)+· · · + ·Ac(i−K+1)
K + (K− 1) + · · · + 1 . (3)
Note that for any pi such that i < K, we set K = i.
Definition 6 (Smoothed Distance Complexity) Smoothed distance complexity SDci of
pi is defined as the weighted moving average of Dci with parameter K, i.e.,
SDci=
K· Dci+ (K − 1) · Dc(i−1)+· · · + Dc(i−K+1)
K + (K− 1) + · · · + 1 . (4)
Note that for any pi such that i < K, we set K = i.
After defining moving complexities capturing different moving behaviors, we propose an approach to determine a proper fan-shaped range on-the-fly. Recall that to shorten a response time, the number of road segments in each estimation is limited on a server. We first set
Areaf ixed as the upper bound size of the fan shaped ranges, and express it in Equ (5), where
Angle and Radius represent the center angle and radius of the fan shape with area equals to Areaf ixed.
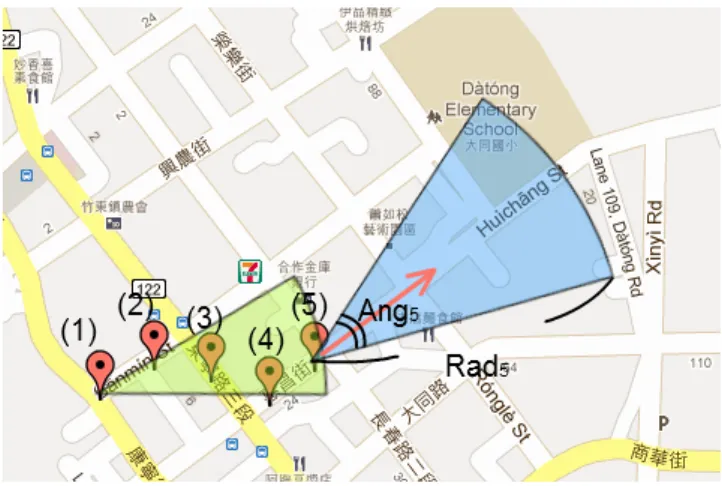
Figure 4.3: Expanding ⟨Ac5, Dc5⟩ forming the desired ⟨Ang5, Rad5⟩ with R = 5.
Areaf ixed = π· Radius2·
Angle
360◦ . (5)
Consequently, the desired fan shaped range could be represented as a two-tuple vector
⟨Angle, Radius⟩ = ⟨Angi, Radi⟩. Based on moving complexities Aci and Dci, countless kinds
of fan shaped ranges with the same area Areaf ixed could be formed, e.g., one (⟨Aci, Dderived⟩)
has Acias the central angle and another (⟨Aderived, Dci⟩) has Dci as the radius; the former type
usually has a long narrow fan shape, and the latter one usually has a short wide fan shape. Given two fan shaped ranges at both extremes, CQ-DFS applies the concept of Doctrine of
the Mean expanding both the central angle and the radius from Aci and Dci until the area
of the expanded fan shape reaches Areaf ixed. Figure 4.3 depicts this idea, where the small
fan shape represents moving complexities ⟨Ac5, Dc5⟩, and the large fan shape ⟨Ang5, Rad5⟩ is
expanded from it. ⟨Ang5, Rad5⟩ represents our desired fan shape for range query Q5. Note
that the arrow starting from p5 pointing northeast represents the direction that p5 faces, and
it is also the direction that CQ-DFS requests the desired Q5.
In order to examine the ratio between the given fixed area Areaf ixed and the original fan
shape ⟨Aci, Dci⟩, we derive the Area Multiplier AMi in Equ (6), which indicates the ratio
by which the original fan shape could be expanded. With AMi available, we multiply both
Radius2 and Angle terms in Equ 5 with the square root of AMi. The Angi and Radi of the
desired fan-shaped range are derived by mapping the corresponding terms Rad2
respectively.
For example, suppose the Areaf ixed = 100,000 m2, and the area of the original fan shape
⟨Aci, Dci⟩ equals 50,000 m2, which makes the AMi = 2. We multiply Dci2 and Aci with
√ 2, i.e., 100, 000 = π· Dci2 · √ 2· Aci· √ 2
360◦ ; thus, the desired ⟨Angi, Radi⟩ = ⟨Aci·
√ 2,√Dci2· √ 2⟩. AMi = Areaf ixed π· D2 ci· Aci 360o (6) Areaf ixed = (π· Dci2· Aci 360◦)· (AMi) = π· (Dci2· √ AMi)· ( Aci· √ AMi 360◦ ) = π· (Radi2)· ( Angi 360◦) Angi 360◦ = Aci· √ AMi 360◦ Angi = Aci· √ AMi (7) Radi2 = Dci2· √ AMi Radi = √ Dci2· √ AMi (8)
4.3
Caching Overlapping Query Results
While driving, people request queries in short periods to avoid missing upcoming events. Frequent queries would induce heavy computations for servers. However, we observe that in certain short periods of continuous range query applications, consecutive queried ranges (i.e.,
Qi and Qi+1) possibly overlap geometrically, and the queried ranges issued by different users
(i.e., Qi corresponding to user uj and Qi′ corresponding to user uj′) also possibly overlap
geometrically. Consequently, caching of the result w.r.t. Qi would benefit the processing of
another range query.
However, the retrieved information would have an expiration time. For instance, the
traffic status usually changes over time, so a traffic estimation has an expiration time. On the other hand, the evaluated traffic status remains the same, whenever any other user who has also issued overlapping query ranges for traffic monitoring services, the information could be
delivered directly as well. In this paper, we only focus on the benefit that a caching scheme would provide to the original user uj, but do not detail an intra-user system architecture.
Similarly, we take an application of nearby traffic monitoring in road networks as an
example. First, suppose τ = 40, Areaf ixed = 50000m2 and the query Q1 contains totally
40 road segments (≤ τ), and the corresponding query result E1 is delivered on time (i.e.,
r1 < t2). Assume that the query Q2 also contains 40 road segments with 15 overlapping with
Q1. Consequently, the server only needs to find out those 25 non-repeated road segments.
As the query processing cost (to be more specific, the estimation of the traffic status of road segments) is the major performance bottleneck, caching of 15 road segments locally, together with their estimated traffic information, leaves extra space to retrieve another 15 road segments. In other words, the server is capable of evaluating a larger query shape which contains 55 road segments. Given the fact that 15 road segments are already known to the server, it only retrieves those non-repeated road segments.
To reasonably expand the fan shape when overlapping occurs, the idea is to proportionally increase the fixed area w.r.t. the overlap ratio ξi of Qi, i.e., the ratio of the number of
overlapping road segments to the total road segments contained in the range. Continuing the
example above, Q2 contains 40 road segments with 15 overlapping with Q1, and the given
area Areaf ixed = 50000m2. The overlap ratio ξ2 = 1540 = 0.375, and hence the area of Q2 will
be expanded to 500001−ξ
2 = 80000 square meters.
With the caching capability of a server enabled, a range query request from a user is processed as follows. Take nearby traffic monitoring in road networks as an example. First,
the server forms a range query Qi by CQ-DFS. Second, it looks up the traffic estimation
cache to determine how many road segments included in Qi are actually locally available and
derives the overlap ratio ξi accordingly. It then expands the search area of Qi based on ξi
and fetches those non-repeated road segments included in Qi. Finally, an estimation Ei which
contains all the road segments included in Qi, i.e., both overlapping and non-overlapping ones,
is delivered to the user to finish this service request. Note that this approach is based on the assumption that the density of the road network nearby is approximately equal. In other words, whenever the user passes from a sparse road network through a dense one, the total number of road segments covered by the certain expanded fan shape could be much more compared to traveling in the sparse density road network. Nevertheless, as we mentioned
earlier, compared to controlling the number of road segments, the fixed area scheme is already an underestimated approach. Thus, in CQ-DFS, the assumption of an equal density road network is acceptable.
Chapter 5
Performance Study
In this section, a comprehensive simulation is conducted to evaluate the performance of the
CQ-DFS framework. We implement the CarWeb traffic status estimation service in the PHP
programming language running on a CarWeb Ubuntu server powered by an Intel(R) Core 2 Duo 2.66GHz CPU with 8,960MB memory and PostgreSQL with PostGIS extension as the backend spatial database.
A real dataset extracted from the CarWeb repository [27] is used. The CarWeb repository records the user locations reported every 5 seconds by GPS devices. After filtering out noises like discontinuity, and short trajectories which contain less than 30 records, in total of 144 trajectories with 25,923 GPS records are retained. In order to study the moving behaviors of different types of users, we cluster those representative trajectories into four subsets. Subset 1 consists of all the trajectories with their distance complexity falling between 30 and 70
meters and hence it represents the slow moving group with velocity between 21.6 ∼ 50.4
km/hr. Subset 2 consists of all the trajectories with their distance complexity falling between
90 and 150 meters and hence it corresponds to the fast moving group with velocity between 64.8 ∼ 108 km/hr. Subset 3 consists of all the trajectories with their angular complexity
falling between 30o and 90o and hence it represents the directional moving group. Subset 4
consists of all the trajectories with their angular complexity falling between 120o and 180o and hence it represents the undirectional moving group. Table I summarizes the properties of these four subsets. Each subset is filtered through the same procedure, which goes through
every trajectory and retains 50 consecutive GPS records conforming to the constraints of each subset, for example, searching through a highway trajectory to extract 50 consecutive points
with angular complexity falling within 30 ∼ 90 degrees and clustered in Subset 3. Notice
that the angular and distance complexities in subset constraints are the same as Definitions 1
and 2, and the default parameter settings of Amin and Dmin are 30 degrees and 30 meters
respectively. For reasons of fairness, we totally retain 50 trajectories in each subset, thus each subset contains 2,500 GPS records. In other words, the subset data generation process starts from the full dataset going through each real trajectory alphabetically, and retain 50 consecutive records as a trajectory. The process ends whenever 50 trajectories are clustered in each subset, or all trajectories from the full dataset have been visited.
Table I: Trajectory subsets details.
Subset Number Feature Distance Complexity Angular Complexity
Subset 1 Slow Moving 30 ∼ 70 meters X
Subset 2 Fast Moving 90∼ 150 meters X
Subset 3 Directional Moving X 30∼ 90 degrees
Subset 4 Undirectional Moving X 120 ∼ 180 degrees
As defined in Section 3, Precision and Recall are the main performance metrics used in this work. In the simulation, we assume a user moves along a trajectory and updates its location every 5 seconds. Right after receiving a location update from a user, the server forms a fan-shaped range query on-the-fly, processes the query, and sends back the result to the user as a traffic estimation. For each estimation Ei, we record the response time between the user
submitting a location update and the user receiving Ei, and those estimations with response
time longer than 5 seconds will not contribute to the Precision and Recall metrics. Let us give a more detailed description of how we evaluate Precision and Recall for a trajectory which
is composed of 50 GPS records. p1 is the first location update from the user, the evaluation
of both metrics starts from p2 to p50 examining whether those locations are covered by the
previous range queries whenever the query results are delivered on time. Going through
p2 ∼ p50, a Precision value and a Recall value are evaluated. Given a total of 50 trajectories
in each data subset, 50 Precision and Recall values are evaluated respectively. The average
Precision and Recall values are calculated, and graphed in all sets of experiments.
CQ-DFS, compared with the performance of other continuous queries with different shapes,
for different user moving behaviors. To be more specific, we evaluate the performance of
CQ-DFS with the users of different moving speeds (i.e., different distance complexities) via using
subset 1 and subset 2 in Section 5.1, evaluate the performance of CQ-DFS with the users of different moving directions (i.e., different angular complexities) via using subset 3 and subset 4 in Section 5.2, and evaluate the performance of CQ-DFS with the users of different moving behaviors (i.e., different distance complexities and different angular complexities) via using the full dataset in Section 5.3. In addition to CQ-DFS which forms fan-shaped range queries dynamically (denoted as DynamicFan), we also implement range queries of circular shapes, static fan shapes with a central angle of 120o, and static fan shapes with a central angle of
45o, referred to as Circular, StaticFan120, and StaticFan45 respectively. Note that Circular is centered at the user’s location, while StaticFan120, StaticFan45, and DynamicFan request fan shaped range queries according to the user’s direction at each query point. For each round of simulation, given an area of fixed size, the parameters of each query shape are derived accordingly.
In the fourth set of experiments, we verify the formation of the fan shaped query. Given a
fixed area, we can form a fan shape based on distance complexity Dci or angular complexity
Aci, as mentioned in Section 4. However, we have proposed different approaches to improve
the Precision and Recall of fan-shaped range queries, including the smoothed complexities introduced in Section 4.2, adopting the concept of Doctrine of the Mean to determine the central angle and the radius of the fan shape introduced in Section 4.2, and enabling the caching of overlapping traffic results in the server introduced in Section 4.3. For presentation simplicity, they are referred to as Smo.Com., Dyn.FanForm, and Caching respectively in the following descriptions. Consequently, we want to demonstrate that the proposed approaches
do improve the performance to a certain degree. In order to achieve this, we implement
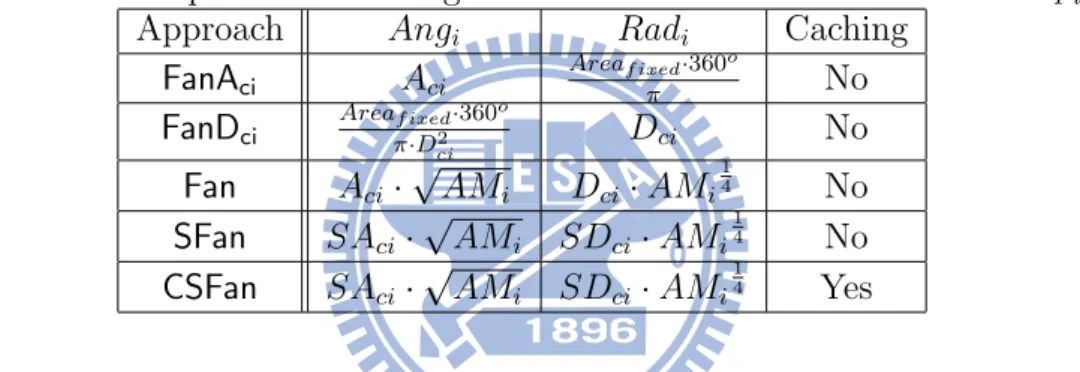
and evaluate five fan shaped formation algorithms, as summarized in Table II. The first
two algorithms, i.e., FanAci and FanDci are purely based on either angular complexity Aci
or distance complexity Dci, and they do not support caching. Algorithm Fan is still based
on complexities Aci and Dci but it does consider both complexities and apply the concept
of doctrine of the mean to form the fan shaped search range, i.e., supporting Dyn.FanForm. Instead of using complexities, the fourth algorithm SFan considers smoothed complexities
SAci and SDci, i.e., supporting both Dyn.FanForm and Smo.Com.. The last algorithm CSFan
is almost the same as SFan but it enables the caching of overlapping traffic results, i.e., supporting Smo.Com., Dyn.FanForm, and Caching. The experimental results, to be represented later, will demonstrate the effectiveness of different approaches.
In the fifth experiment, we report the query response time of experiments in Sections 5.3 and 5.4, comparing different settings and different shapes of query ranges given the same
query size. We also demonstrate the reasons we applied 80,000 m2 as the maximum query
size in this experiment.
In the sixth experiment, we further perform the same simulation of experiments in Sec-tions 5.3 and 5.4 by using different period of location reporting datasets and different query sizes. The purpose of this experiment is to examine if CQ-DFS could be applied to different periods of moving trajectories.
Table II: Fan shaped formation algorithms for a fan with its area = AreaF ixed.
Approach Angi Radi Caching
FanAci Aci Areaf ixed·360o π No FanDci Areaf ixed·360o π·D2 ci Dci No Fan Aci· √ AMi Dci· AMi 1 4 No SFan SAci· √ AMi SDci· AMi 1 4 No CSFan SAci· √ AMi SDci· AMi 1 4 Yes
Please refer to Table III for the system parameter settings. Notice that in all experiments, we evaluate the Precision and Recall of different range queries with fixed areas ranging between
10,000 and 80,000 m2. We set 10,000 m2 as the lower boundary for the CarWeb traffic status
estimation service. For example, Circular with 10,000 m2 area has a radius of 56.42 meters and
StaticFan45 with 10,000 m2area has a radius of 159.58 meters. Consequently, any smaller area would significantly drop the Precision and Recall no matter which query shape is applied. On the other hand, Circular with an 80,000 m2 area has a radius of 159.58 meters and StaticFan45
with an 80,000 m2 area has a radius of 451.35 meters. Consequently, we set 80,000 m2 as
the upper boundary, as a larger area would cover too many road segments that could not guarantee that the query result would be delivered on time.
Table III: Environmental constants and parameter settings.
Name Value
Amin: Min. Ang. Complexity 30o
Dmin: Min. Dist. Complexity 30 m
Fixed Area 10,000 ∼ 80,000 m2
R: Reference Factor 3
KW M A 3
5.1
Comparing Query Shapes for Different Distance
Com-plexities
The first set of experiments is to evaluate the performance of continuous queries with different shapes in the cases where users have different distance complexities. First, we study their performance when the users are moving relatively slowly via using subset 1 with the results displayed in Figures 5.1(a) and 5.1(b). It is observed that StaticFan45 performs the worst in both Precision and Recall. In Precision, StaticFan45 performs significantly worse than the others no matter which area size is applied. In Recall, StaticFan45 only achieves around
0.75 even when the area size reaches 80,000 m2. This is because subset 1 corresponds to
the slow moving group; there are many trajectories in the central downtown area where moving objects keep changing moving directions. StaticFan45, due to its relatively narrow and long query range, does not match the moving behaviors of users within Subset 1. Circular performs slightly worse than StaticFan120 when the area of the queried range is small (e.g., 10,000∼40,000 m2). DynamicFan performs the best in both Precision and Recall, especially in the cases where the query range is of small size (e.g., 10,000∼30,000 m2). The reason behind
this is that CQ-DFS considers the former moving behaviors when predicting the behaviors, and changes the queried ranges when moving behaviors change. Consequently, DynamicFan has a higher chance of forming queries that truly match the real movements. In subset 1, DynamicFan usually widens the central angle to larger than 130o.
Next, we study their performance when the users are moving relatively fast via using subset 2 with the results displayed in Figures 5.1(c) and 5.1(d). Different from previous observations, Circular and StaticFan120 have the lowest Precision and Recall. This is because subset 2 corresponds to users with relatively fast velocity. In other words, trajectories in subset
(a) Avg. precision of subset 1. (b) Avg. recall of subset 1.
(c) Avg. precision of subset 2. (d) Avg. recall of subset 2.
Figure 5.1: Experimental results of subset 1 and 2 comparing different query shapes. 2 are normally less complex and experience fewer turns. Consequently, direction-insensitive approaches like Circular and StaticFan120 do not match users’ real movements, unless the fixed area reaches 70,000∼80,000 m2. It is observed that StaticFan45 and DynamicFan perform
much better in both Precision and Recall, while DynamicFan performs slightly better, due to its customizable feature that it is stretched to a narrow shape with a small angle between
30o∼40o, which is slightly narrower and longer than StaticFan45. In brief, compared with
continuous queries of other shapes, DynamicFan demonstrates the best resilience to the distance complexities, and it achieves the best Precision and Recall for both slow-moving users and fast moving users.
Note that all Precision results in our performance study appear strictly decreasing as the given query size increases. This is because a larger query range tends to cover more road segments, while there is only one of them which could possibly be considered as a relevant road segment in the Precision metric, as Definition 1 shows. On the other hand, all Recall results in our performance study appear to be increasing and converge to a specific value or 1
as the given query size increases. This is because a larger query range tends to have a higher possibility of covering the relevant road segment of each range query, while the number of relevant road segments of a trajectory is fixed, that is the length of the trip excluding the start point. We discuss these shared phenomena in this section, and will not repeat it in the following experiments.
5.2
Comparing Query Shapes for Different Angular
Com-plexities
The second set of experiments is to evaluate the performance of continuous queries with different shapes in the cases where users have different angular complexities. First, we study their performance when the users are moving directionally via using subset 3 with the results displayed in Figures 5.2(a) and 5.2(b). It is observed that Circular and StaticFan120 both have lower Precision and Recall, while StaticFan45 and DynamicFan offer much better Precision and
Recall. We also observe that the simulation result for subset 3 is similar to the result reported
in Figures 5.1(c) and 5.1(d), which is expected since both subsets share a great portion of the fast moving trajectories on the highway.
Nevertheless, when the fixed area of the query range is small, DynamicFan outperforms StaticFan45. This is because around half of the trajectories are moving straight and fast and DynamicFan actually forms query ranges with a narrowed central angle (i.e., < 45o) which
successfully captures some fast moving behaviors that StaticFan45 could not cover.
We also study their performance when the users are moving undirectionally via using subset 4 with the result displayed in Figures 5.2(c) and 5.2(d). StaticFan45 generates the worst Precision and Recall. Even when the fixed area is set to 80,000 m2, its Recall is only
around 0.65. StaticFan120 performs much better as it reaches more than 0.9 in Recall when the fixed area is 80,000 m2. We also observe that StaticFan120 could not achieve 1 in Recall,
which is very different from its performance in the above experiments. This is because subset 4 mainly consists of many complex moving behaviors. DynamicFan and Circular both perform