Proceedings of the 35th FM19 3:lO Conference on Decision and Control
Kobe, Japan December 1996
Active Design
of
Hard Disk Suspension Assemblies
Using Multiobjective Optimization Techniques
Yee-Pien Yang and Chin-Chung Kuo Department of Mechanical Engineering
National Taiwan University Taipei, Taiwan 106, R.O.C. 02-363-0231
Ext.2175
Abstract
The active designs of hard disk suspension assem- blies is formulated as multiobjective optimization problems. This design methodology integrates the structure and control objectives, which consist of natural frequencies and an optimal control perfor- mance index with weighted system state regula- tion errors and control efforts. Preloading and air bearing effects are both considered in the optimal design. The interface program communicates be- tween the finite element analyzer and the optimizer with two multiobjective optimization techniques - goal programming and compromise programming. The feasibility of the optimal design is demonstrat- ed and the frequency responses are investigated.
Introduction
This paper presents a multiobjective optimization design on the suspension assemblies. The integrat- ed structure and control optimization is applied to the actively controlled suspension assemblies, where the performance index of the linear quadratic regulator is incorporated with frequency objectives.
Modeling of Suspension Assembly The hard disk suspension assembly consists of a mounting block, suspension beam, flexure and s- lider. The Hutchinson Type 870 suspension used in this research. The finite element model is cre-
ated with the undeformed state of suspension. Af- ter loaded onto the hard disk, the suspension nn- dergoes a preloading force about 5.5269N, and the angle between the suspension and the base line of the mounting block reduces from 10 to about 2 de- grees. This loading process can be performed by analysis procedures of ABAQUS', where the user simply divides the loading histories into steps and comes up with the deformed state of pre-stress for
subsequent analyses. The air bearing that sepa- rates the slider from the media during the operation is approximated by four linear springs supporting at four corners of the slider.
Finite Element Model. The finite elemen- t model, as shown in Fig. 1, for the suspension assembly includes initially a grand total of 338 el- ements, 439 nodes, with 2551 degrees of freedom. Three shape parameters are selected as design vari- ables by sensitivity analysis: H B A S E , H L and R H .
The equations of motion of the suspension assembly for the finite element model of order
N
have the formM(x)q
-t C(X);l4-
K(x)q =Bu
(1) where x is a vector of design variables, M ( x ) is a positive definite symmetric mass matrix, K(x) is the nonnegative symmetric stiffness matrix, and q is the generalized nodal coordinates. The first 4 natural frequencies of the original suspension in the unloaded and loaded positions are compared in Table 1.Integrated Structure and Control optimization
The multiobjective optimization problem can be s- tated as follows:
Minimize the cost functionals
subject to the minimum and maximum values of design variables.
It is efficient and practical for the designer to trun- cate those modal coordinates that correspond to high-frequency modes. In the following optimal control formulation, selected are 10 modal coordi- nates that describe the dominant dynamic behavior of the suspension assembly. In order t o design a 4234
linear quadratic regulator a performance index ( P I )
can be defined as
H B A ~ E ( m m ) H L
where q = [qT qTIT, and Q and
R
are weighting matrices.Table 1 Natural frequencies of suspension assembly
1
UnloadedI
Loadedp = 1 y = l 1.370 1.370 6.000 6.000
but depends on additional engineering experience, manufacturing requirements, and so on.
Acknowledgment
This research was supported by National Science Council under Contract No. NSC83-0422-E002-005.
References
[l] Tseng, C. H., Liao,
W.
C.
and Yang,T. C.,
MOST
User’s Manual Version 1.1, Techni- cal Report No. AODL-93-01, National Chiau- Tung University, Taiwan,R.O.C.,
1993. [2] Yang,Y. P.
and Tseng, C. H., “MultiobjectiveOptimization of Complex Structures Integrat- ed with Finite Element Software on Worksta- tions,” Journal of the Chinese Society of Me- chanical Engineers, Vol. 16, No. 2, 1995, pp.
Active
design with bothvertical
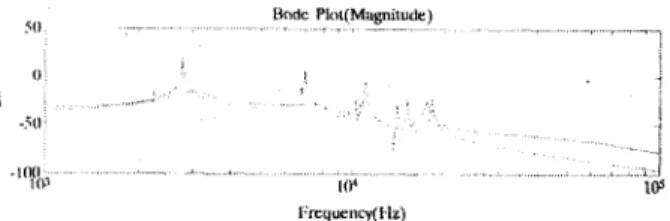
and l a t e r a l control efforts. It is adequate t o implement the control forces independently in both the y and z- directions on the yz-plane. Figure 2 shows the Bode plots of the active design obtained by the compro- mise programming with independent control forces in the y and z-directions, andall
the bending and torsional modes are perfectly suppressed. Table 2 shows the corresponding values of design variables, natural frequencies and costs. The optimal shape in the finite element mesh for the case of y = 1 is presented in Fig. 3.S u m m a r y and Conclusions
The multiobjective optimization design of the sus- pension assembly of hard disk drives has been p- resented. The final solution may not be unique,
Fig. 1 Finite element model of suspension assembly
node Flol(Ma~ml1udr)
- ,-
ill .
-I1 ,
I~’KqurllLy(tlr)
Fig. 2 Closed-loop frequency response of suspen- sion by active design
Fig. 3 Optimal shape of active design