Journal of Engineering Technology and Education, ISSN 1813-3851
Study on Optimization for Four Bar-Partially Compliant Mechanism
Shyh-Chour Huang*, Thanh-Phong Dao
Department of Mechanical Engineering,
National Kaohsiung University of Applied Sciences Kaohsiung, Taiwan *E-mail: [email protected]
Abstract
This paper concentrates on the application of fuzzy logic based on Taguchi method (FLTM) for multiobjective optimization of the small-length flexural pivot (belongs to link 4) in partially four bar-compliant mechanisms. The input parameters such as the input torque and the crank angle of link 2 were optimized with considerations of the multiple performance measures as angular displacement and stress of the small-length flexural pivot. Angular displacement and stress of the small-length flexural pivot are two objective functions were formulated using pseudo-rigid-body model (PRBM) and principle of virtual work. The results found that the input torque at level 1 of 3 Nm and crank angular at level 1 of 100 degrees are favorable parameters for compliant flapper mechanism. Based on ANOVA, the results showed that input torque is the most significant with respond highest value of F test of 4.1752.
Keywords: Multi-response performance index, Fuzzy logic based on Taguchi method, Pseudo-rigid-body model
1. Introduction
Design and analysis of compliant mechanisms have interested in past decades due to their less expensive, lighter as compared to rigid-link mechanisms. The compliant mechanisms relies on the deflection of flexible members, thus their maximum deflection and minimum stress have been the important issues in designing flexible structures in recent years. In 2010, Tanık et al. [1] used the theory of the pseudo-rigid-body model (PRBM) to analyze compliant variable stroke mechanism. Khatait et al. [2] modified the stiffness of the flexural hinges to minimize driving torque. Midha et al. [3] utilized PRBM to analyze limit positions of compliant mechanism. Dado [4] studied large deflections of compliant mechanism using PRBM. In 2012, Hsiang et al. [5] studied the optimization of extrusion magnesium alloy bicycle carriers by using fuzzy logic based on Taguchi method (FLTM). According to Venanzi [6], the non-linear position analysis of planar compliant mechanisms was performed by using an iterative technique. A new method is proposed to easily establish simple and analyze using PRBM for a variety of beam-based compliant mechanisms performed by Pei [7]. The other study by Tsay [8] presented the design, fabrication and experiment of fully compliant bistable micro-mechanisms. Pucheta [9] presented a method is based on the solution of the initial and final unstrained positions for the design of bistable mechanisms. In 2011, Gupta et al. [10] presented the application of FLTM for multiple output optimization of high speed CNC turning.
In spite of the four-bar compliant mechanisms have been so far received a growth of interest in the robotic devices and the other growth of specific interest to humanoid robots where human-like manipulation skill is required as well because their size, weight, reliability, cost and applicability, etc. In order to analyze kinematics, dynamics, and optimize these compliant mechanisms, they have still been the complicated problems to researchers. In particular, the structure of the compliant mechanisms is very sensitive to dynamic actions like shock and
vibrations that occur during motion process. In order to move to desired positions the fatigue, the stress, and thus the displacement must be considered in design area simultaneously.
One of the challenges of compliant mechanism is to allow large enough deflections for the mechanism to perform its function while maintaining stresses below an allowable maximum stress. Therefore, the maximum displacement and minimum stress have been still interested tasks in recent years for many researchers. There are many optimization approaches used in engineering such as Taguchi method, fuzzy logic control, genetic algorithm, and neural network; among them, Taguchi method is not a complicate procedure but it can only optimize for single objective function. As a result, an attempt to develop approaches for optimization of multi-objective functions has researched so far, like FLTM, genetic algorithm based on fuzzy logic control, etc. One of the another reasons is that almost previous studies have not significantly investigated the optimization compliant mechanisms by using FLTM; they focused on the use of conventional procedures to optimize topology of mechanisms and more recently years some authors have optimized the various shapes of flexible segments to release the stress concentration along the flexible beams. As a result, the optimization of process parameters to maximize deflection of flexible segment and minimize its stress simultaneously was studied in this paper.
There have been many existed effective approaches such as the PRBM, the screw theory, the building-block based approach, the topological optimization, and the constraint-based design to analyze statics, kinematics and dynamics of the compliant mechanisms. Among them, the PRBM is a helpful tool and easy to use. So, the PRBM was applied in this paper.
In addition, the equations of multiobjective functions are formulated by using PRBM and the principle of virtual work; these have been easy tools to analyze the compliant mechanisms in past decades. In fuzzy-logic control algorithm, the membership functions setting is very important in order to achieve optimal parameter value, there are excessive number of experiments; therefore, this research exploited Taguchi method was adopted to decrease the number of experiments. Furthermore, the adjusting the weight of membership function is also significantly important to achieve optimal system.
This paper describes the main guidelines for analysis and optimization of four-bar partially compliant mechanism. It proposes a novel optimization method that is FLTM in order to maximize angular displacement and minimize stress simultaneously of small-length flexural pivot. This one can further uses in the other structures and engineering fields.
The rest of the paper is organized as follows. Section 2 analyzes four-bar partially compliant mechanism in order to formulate the multi-objective function equations. Section 3 describes the optimization of four-bar partially compliant mechanism. It will present Taguchi method with multiple performance characteristics and the way how to combine with the fuzzy logic controller in the optimization for angular displacement and the stress simultaneously. Also in Section 3, this paper will present the results and discussions of the paper. Final section will be the conclusion of this study.
2. Analysis of Four-Bar Partially Compliant Mechanism
In this stage, the paper will apply theory of PRBM and virtual work [11] to model and analyze flexible beams and segments. And then it will formulate the equations of multiobjective functions including angular displacement and stress for optimal process.
2.1 Modeling
In this paper, the compliant beams are made of polypropylene
(
E =200,000lb/in2)
due to its low density and high strength-to-modulus ratio. Polypropylene is ductile material and thus it is much less likely to result in catastrophic failure when yielded. The PRBM [11] was utilized to analyze the deflection and the stress of flexible segment in for-bar partially compliant mechanism. The mathematical models of the deflection and the stress of flexible segment were formulated as the following.The partially compliant mechanism as shown in Fig. 1 is a four bar mechanism as a case of a Grashof mechanism known as triple couplers with input crank is link 2, remaining links are rockers. A functional binary, fixed-pinned flexible segment is link 3. The output rocker is link 4 that has one small-length flexural pivot. Deflected position gives in Fig. 2a. The PRBM is shown in Fig. 2b. Using Brushless DC Servo Motor to control flapper compliant mechanism with the following specifications (power: 200 to 4,000 Watts, torque: 2Nm to
Nm
115 ). The dimension of links as follows:
- Cross section of rigid links: Width of 0.8inand thickness of 0.2in.
- Ground link: r =1 3.02in. - Input crank: r =2 in.
- The long flexible segment: l =3 2.97in,width b =3 0.5in, thicknessh =3 0.04in.
- The output rocker: Rigid link of 3in,l =4 0.31in,b =4 0.6in,h =4 0.5in.
This study selected constant values of characteristic radius factor, γ=0.85and stiffness coefficient,
67 . 2 = Θ
K [11] result in a pseudo-rigid coupler with length r3=γl3=2.53in, r4=
(
2.91+l4/2)
=3.07in. The moments of inertial of the flexible segments are:12 3 3 3 3 bh I = (1) 12 3 4 4 4 bh I = (2)
The flexible segments always remains initial state where 0 2=90
θ . The values of θ and 30 θ40can be calculated by using the closed-form equations [11] as follows:
The crank angle measured from
r
1isθ2′ :1 2
2 θ θ
θ′= + (3)
whereθ is the angle between horizontal direction with the line coupled from joint A to joint D. 1
The law of cosines may be used to determine the length of δ and the internal anglesβand
λ
as follows:(
)
1/2 2 2 1 2 2 2 1 2 cosθ
δ
= r +r − rr ′ (4) δ δ β 1 2 2 2 2 1 2 cos r r r a + − = (5)δ δ λ 4 2 3 2 2 4 2 cos r r r a + − = (6) δ δ α 3 2 4 2 2 3 2 cos r r r + − = (7)
Two possible values exist for each angle for a given θ The link angles are calculated as follows: 2. For 0≤θ2′≤π
(
1)
3α
β
θ
θ
= − − (8)(
1)
4π
λ
β
θ
θ
= − − − (9) For π≤θ2′≤2π(
1)
3α
β
θ
θ
= + + (10)(
1)
4π
λ
β
θ
θ
= − + + (11)Fig. 2 a. Deflected position model, b. Pseudo-rigid body model
2.2 Reaction Forces at Pivot joints
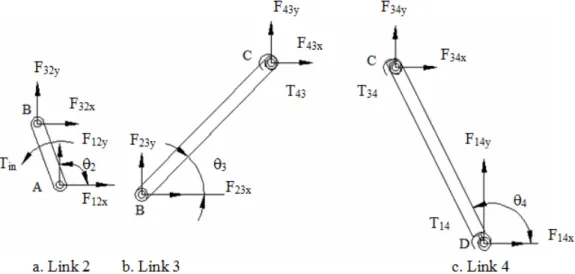
Free body diagrams (Newtonian methods) [11] are used to determine equations of reaction forces at pivots for static equilibrium of each link. Free body diagrams of links are illustrated in Fig. 3.
Fig. 3 Free body diagram of links: a. Link 2, b. Link 3, c. Link 4 For link 2: 0 32 12x+F x = F (12) 0 32 12y +F y = F (13)
(
90)
cos(
90)
0 sin 2 32 2 2 2 32 × × − − × × − = −F rθ
F rθ
Tin y x (14) For link 3:0 43 23x +F x = F (15) 0 43 23y +F y = F (16) 0 sin cos 3 43 3 3 3 43 43+F ×r × θ −F ×r × θ = T y x (17) For link 4: 0 34 14x+F x = F (18) 0 34 14y+F y = F (19)
(
90)
cos(
90)
0 sin 4 34 4 4 4 34 34 14+T −F ×r × θ − −F ×r × θ − = T y x (20)At a pin joint, the forces on the connected links have equal magnitude but are in opposite directions:
x x F F23 =− 32 (21) y y F F23 =− 32 (22) x x F F34 =− 43 (23) y y F F34 =− 43 (24)
The spring constants at pin joints due to the springs [11]: Due to fixed-pinned segment
3 34 = l EI K K γ Θ (25)
Due small-length flexural pivot
4 14 = l EI K (26)
The torques at pin joints due the as follows [11]: A PRBM with a linear torsional spring constant, Ki,
i i
K
T=− Ψ (27)
where Ψ is the Largrangian coordinate The torque at pin joints 1 and 2:
0
2 1=
T
=
T
(28)The torque caused by the torsional spring modeling fixed-pinned segment:
(
) (
)
[
4 40 3 30]
3 3 34 34γ
θ
−θ
−θ
−θ
− = Ψ − = Θ l EI K K T (29)The torque caused by the torsional spring modeling the small-length flexural pivot:
(
)
(
4 40)
4 40 4 4 14 14Ψ
θ
θ
θ
−θ
− = − = − = l EI K T (30)Combining Eqs.15, 16, and 17 results in:
0
sin
cos
3 23 3 3 3 23 43−
F
×
r
×
θ
+
F
×
r
×
θ
=
T
y x (31)Combining Eqs.14, 21, and 22 results in:
(
90)
cos(
90)
0 sin 2 23 2 2 2 23 × × − + × × − = +F rθ
F rθ
Tin y x (32)From Eq.31 results in:
3 3 43 3 23 23 =F ×cotθ −r ×Tsinθ F x y (33) Substituting Eq.33 into Eq.32 results in:
(
)
(
)
(
)
[
sin 90 cot cos 90]
sin sin 90 cos 2 3 2 3 3 2 3 3 2 2 43 23 × × − + × − × × − − × × = θ θ θ θ θ θ r r r T r T F in y (34)
Substituting Eq.34 into Eq.33 results in
(
)
[
]
[
]
(
)
(
)
[
]
× − − × + − × × × × × − − × × = 3 3 43 2 3 2 3 3 2 3 3 3 2 2 4323 rT r rsincosθ sinθ θ9090T cotrθ sincosθ θcot90θ r Tsinθ
F in
Table 6. Results of ANOVA
Symbol Parameters DOF SS V F
A Input torque 2 0.4791 0.2395 4.1752
B crank angle 2 0.0084 0.0042 0.0731
Error 4 0.2295 0.0574
Total 8 0.717
4. Conclusions
The paper presents the combination of fuzzy logic controller with Taguchi method as a novel proposed optimization tool in for the four-bar partially compliant mechanism. The two objective functions such as angular displacement and stress of the small-length flexural pivot were formulated using theory of PRBM and principle of virtual work. Through the use of fuzzy logic-Taguchi method, this paper found the optimal process parameters such as input torque at level 1 of 3Nmand crank angle at level 1 of 100 degrees for maximizing angular displacement and minimizing the stress simultaneously. The result revealed that input torque is the most significant parameter affecting structure of for-bar partially compliant mechanism with largest value of F test of 4.1752. This proposed novel optimization method can be further utilized in engineering areas.
Acknowledgments
The authors acknowledge and thank the National Science Council of the Republic of China for their financial support of this study under Contract Number: NSC 99-2221-E-151 -004 -MY2.
References
[1] Tanık, E. and Söylemez, E., “Analysis and design of a compliant variable stroke mechanism”, Mechanism and Machine Theory, Vol. 45, pp. 1385-1394, 2010.
[2] Khatait, J.P., Mukherjee, S., and Seth, B., “Compliant design for flapping mechanism: A minimum torque approach”, Mechanism and Machine Theory, Vol. 41, pp. 3-16, 2006.
[3] Midhaa, A., Howell, L.L., and Norton, T.W., “Limit positions of compliant mechanisms using the pseudo-rigid-body model concept”, Mechanism and Machine Theory, Vol. 35, pp. 99-115, 2000.
[4] Dado, M.H., “Variable parametric pseudo-rigid-body model for large-deflection beams with end loads”, International Journal of Non-Linear Mechanics, Vol. 36, pp. 1123-1133, 2001.
[5] Hsiang, S.H., Lin, Y.W., and Lai, J.W., “Application of fuzzy-based Taguchi method to the optimization of extrusion of magnesium alloy bicycle carriers”, J Intell Manuf, Vol. 23, pp. 629-638, 2012.
[6] Venanzi, S., Giesen, P., and Castelli, V. P., “A novel technique for position analysis of planar compliant mechanisms”, Mechanism and Machine Theory, Vol. 40, pp. 1224-1239, 2005.
[7] Pei, X., Yu, J., Zong, G., and Bi, S., “An effective pseudo-rigid-body method for beam-based compliant mechanisms”, Precision Engineering, Vol. 34, pp. 634-639, 2010.
[8] Tsay, J., Chang, H.A., and Sung, C.K., “Design and experiments of fully compliant bistable micromechanisms”, Mechanism and Machine Theory, Vol. 40, pp. 17-31, 2005.
[9] Pucheta, M. A., and Cardona, A., “Design of bistable compliant mechanisms using precision–position and rigid-body replacement methods”, Mechanism and Machine Theory, Vol. 45, pp. 304-326, 2010.
[10] Gupta, A., Singh, H., and Aggarwal, A., “Taguchi-fuzzy multi output optimization (MOO) in high speed CNC turning of AISI P-20 tool steel”, Expert Systems with Applications, Vol. 38, pp. 6822-6828, 2011.