行政院國家科學委員會專題研究計畫 成果報告
流體注入對圓柱尾流渦漩的影響與其流場控制研究(3/3)
計畫類別: 個別型計畫 計畫編號: NSC91-2212-E-110-018- 執行期間: 91 年 08 月 01 日至 92 年 07 月 31 日 執行單位: 國立中山大學機械與機電工程學系(所) 計畫主持人: 游明輝 計畫參與人員: 廖益群、陳樺鋒、林鉅育、張天立、邵家麒、詹智偉 報告類型: 完整報告 報告附件: 出席國際會議研究心得報告及發表論文 處理方式: 本計畫可公開查詢 中 華 民 國 92 年 10 月 30 日摘
要
本文主要是以實驗與數值計算方法來探討單一圓柱受動量干擾 時,尾流流場的變化情形。動量的干擾由圓柱表面的一狹縫中,穩定 地注入相同的流體於尾流中,或自尾流中吸出流體,或週期性的注入 -吸出流體。在不同大小、形式、角度的動量干擾下,探討尾流的變 化。結果顯示,當沒有流體注入或吸出時,在探討的雷諾數下465~ 3200,圓柱後面的尾流有渦流結構,主要頻率相當於 Strouhal Number=0.2,作用於圓柱上的阻力與升力也以相同的頻率作上下的起 伏。當在圓柱後面(注入角=0°)以流體注入時,尾流的渦流結構會 被破壞,尾流區域變小,作用在圓柱的阻力也變小,阻力與升力上下 起伏的振幅也縮小。若注入角改變則以上的效果就不明顯。若在0° 角從尾流區吸出流體,則對圓柱阻力與升力的效果與流體注入尾流區 的效果相反。以週期性的注入-吸出,則尾流的主要頻率被注入的頻 率所主宰,作用於圓柱上的阻力,以注入的頻率作上下起伏變動,平 均值及振動都增大,但作用於圓柱的升力則變小為零。 關鍵詞:流場控制、圓柱尾流、流體注入和吸出Abstract
The flow control of a two-dimensional cylinder wake at moderate Reynolds-number is investigated experimentally and numerically. Fluid blowing/suction through a slit on the cylinder surface is used as a control means to affect the vortical structure of the wake flow, and to change the drag and lift forces on the cylinder. Steady blowing, steady suction, and periodic blowing-suction are applied to the wake at varied magnitudes and incident angles. Without fluid blowing or suction, the wake at moderate Reynolds number exhibits vortical structure with a dominant frequency corresponding a Strouhal number of 0.2. The drag and lift coefficients on the cylinder also oscillate at the same frequency. Blowing at the rear point of the cylinder (incident angle=0o) can suppress the vortical structure, reduce the wake region and the mean drag on the cylinder. The amplitude of drag and lift fluctuations are also reduced. Blowing at other angles would not have such obvious effects on the 2D cylinder wake as at the 0o angle. Suction at an angle of 0o has opposite effect on the wake flow and on the cylinder forces as compared to blowing at the same angle. Periodic blowing-suction would control the dominant frequency of the wake flow, increase the drag on the cylinder, but suppress the fluctuation of the lift force on the cylinder. keywords:flow control, 2D cylinder wake, flow blowing and suction
目
錄
中文摘要---i 英文摘要---ii 目錄---iii 圖目錄---vi 第一章 前言---1 1. 1 研究緣由與動機--- ---1 1. 2 文獻回顧---1 1. 3 研究重點---3 第二章 實驗儀器設備---5 2.1 儀器設備---5 2.1.1 水洞---5 2.1.2 動量干擾系統---6 2.2 全面性流場量測---7 2.2.1 PIV 系統---7 2.2.2 影像數據分析---82.2.3 誤差---11 2.3 局部流速量測---13 2.4 流場可視化---14 2.5 力的量測---14 第三章 實驗結果---16 3.1 無干擾之圓柱後尾流場---16 3.1.1 流場可視化觀察---16 3.1.2 速度分佈---17 3.1.3 頻譜分析---18 3.2 穩定動量注入---18 3.2.1 流場可視化觀察---18 3.2.2 速度分佈與頻譜分析--熱膜探針量測結果---19 3.2.3 PIV 觀測結果---21 3.3 穩定動量吸出---25 3.3.1 流場可視化觀察---25 3.3.2 速度分佈與頻譜分析--熱膜探針量測結果---26 3.3.3 PIV 觀測結果---28 3.4 往復式動量注入/吸出---33
3.4.1 流場可視化觀察---33 3.4.2 紊流強度---35 3.4.3 速度分佈---35 第四章 數值模擬---37 4.1 統御方程式---37 4.2 格點生成與獨立---37 4.2.1 軟體模擬---37 4.2.2 格點獨立測試---38 4.3 與實驗值驗證---38 4.4 圓柱升力與阻力---38 4.4.1 零度角注入與吸出之影響---38 4.4.2有角度注入與吸出之影響---39 4.4.3 週期性動量注入與吸出之影響---39 第五章 結論---41 誌謝---43 參考文獻---44
圖 目 錄
圖2.1-1 封閉式水循環系統 圖2.1-2 測試段立體圖 圖2.1-3 圓柱動量干擾示意圖 圖2.1-4 動量干擾之狹縫角度改變圖 圖2.1-5 穩定動量注入/吸入方式 圖2.1-6 往復式運動機構 圖2.2-1 PIV 系統設備圖 圖2.2-2 雷射經透鏡聚焦過程 圖2.2-3 分析程式流程圖 圖2.2-4 不同的 interrogation resolution 比較圖 圖2.2-5 不同的 interrogation resolution 比較圖) 圖2.2-6 Single particle 在不同情形下通過光頁之灰階分佈 圖2.3-1 熱膜測速儀探針(Hot-Film probe)流場量測分析流程 圖2.4-1 流場可視化設備流程 圖2.5-1 應變規設備配置圖 圖2.5-2 固定支架示意圖 圖3.1-1 在 Re=800 之未注動量圓柱尾流流場觀測 圖3.1-2 在 Re=1600 之未注動量圓柱尾流流場觀測圖3.1-2 在 Re=2400 之未注動量圓柱尾流流場觀測 圖3.1-4 在 Re=3200 之未注動量圓柱尾流流場觀測 圖3.1-5 無圓柱流場速度向量分佈圖 at Re = 465 圖3.1-6 無圓柱流場截面速度分佈圖 at Re = 465 圖3.1-7 Re=465 無動量干擾之圓柱後尾流場連續速度向量分佈圖, 週期4.8 sec. 圖3.1-8 在 Re=800 之未注動量圓柱尾流流場影像及頻譜圖 圖3.1-9 在 Re=1600 之未注動量圓柱尾流流場影像及頻譜圖 圖3.1-10 在 Re=2400 之未注動量圓柱尾流流場影像及頻譜圖 圖3.1-11 在 Re=3200 之未注動量圓柱尾流流場影像及頻譜圖 圖3.2-1 在 Re=800 之穩定動量注入圓柱尾流流場影像及頻譜圖,其 中Uj/Uup=4.97 圖3.2-2 在 Re=800 之穩定動量注入圓柱尾流流場影像及頻譜圖,其 中Uj/Uup=9.95 圖3.2-2 在 Re=1600 之穩定動量注入圓柱尾流流場影像及頻譜圖, 其中Uj/Uup=2.49 圖3.2-4 在 Re=1600 之穩定動量注入圓柱尾流流場影像及頻譜圖, 其中Uj/Uup=4.98 圖3.2-5 在 Re=2400 之穩定動量注入圓柱尾流流場影像及頻譜圖,
其中Uj/Uup=1.65 圖3.2-6 在 Re=2400 之穩定動量注入圓柱尾流流場影像及頻譜圖, 其中Uj/Uup=3.31 圖3.2-7 在 Re=3200 之穩定動量注入圓柱尾流流場影像及頻譜圖, 其中Uj/Uup=1.24 圖3.2-8 在 Re=3200 之穩定動量注入圓柱尾流流場影像及頻譜圖, 其中Uj/Uup=2.48 圖3.2-9 在 Re=800 下穩定動量注入圓柱尾流流場於垂直方向速度擾 動之紊流強度分佈 圖3.2-10 在 Re=1600 下穩定動量注入圓柱尾流流場於垂直方向速度 擾動之紊流強度分佈 圖3.2-11 在 Re=2400 下穩定動量注入圓柱尾流流場於垂直方向速度 擾動之紊流強度分佈 圖3.2-12 在 Re=3200 下穩定動量注入圓柱尾流流場於垂直方向速度 擾動之紊流強度分佈 圖3.2-13 在 Re=800 下穩定動量注入圓柱尾流流場於垂直方向速度分 佈 圖3.2-14 在 Re=1600 下穩定動量注入圓柱尾流流場於垂直方向速度 分佈
圖3.2-15 在 Re=2400 下穩定動量注入圓柱尾流流場於垂直方向速度 分佈 圖3.2-16 在 Re=3200 下穩定動量注入圓柱尾流流場於垂直方向速度 分佈 圖3.2-17 Re=465 0°動量注入 Q=0.5 L/min 之圓柱後尾流場連續速度 向量分佈圖,週期 5 sec. 狹縫噴出速度為 Um=520 mm/s. 圖3.2-18 (a) At Re = 465, U∞= 22.1 mm/s, 0˚角動量注入 Q = 0.2 L/min (b) 速度分佈圖 at (X/D)≈2. 圖3.2-19 (a) At Re = 465, U∞= 22.1 mm/s, 0˚角動量注入 Q = 0.5 L/min (b) 速度分佈圖 at (X/D)≈2. 圖3.2-20 (a)At Re = 465, U∞= 22.1 mm/s, 30˚角動量注入 Q = 0.2 L/min(b)速度分佈圖 at (X/D)≈2. 圖3.2-21 (a)At Re = 465, U∞= 22.1 mm/s, 30˚角動量注入 Q = 0.5 L/min(b)速度分佈圖 at (X/D)≈2. 圖3.2-22 Re=465 60°動量注入 Q=0.5 L/min 之圓柱後尾流場連續速 度向量分佈圖,週期 5 sec. 狹縫噴出速度為 Um=520 mm/s. 圖3.2-23 (a)At Re = 465, U∞= 22.1 mm/s, 60˚角動量注入 Q = 0.2 L/min(b)速度分佈圖 at (X/D)≈2. 圖3.2-24 (a)At Re = 465, U∞= 22.1 mm/s, 60˚角動量注入 Q = 0.5
L/min(b)速度分佈圖 at (X/D)≈2. 圖3.2-25 Re=465 90°動量注入 Q=0.5 L/min 之圓柱後尾流場連續速 度向量分佈圖,週期 5 sec. 狹縫噴出速度為 Um=520 mm/s. 圖3.2-26 (a)At Re = 465, U∞= 22.1 mm/s, 90˚角動量注入 Q = 0.2 L/min(b)速度分佈圖 at (X/D)≈2. 圖3.2-27 (a)At Re = 465, U∞= 22.1 mm/s, 90˚角動量注入 Q = 0.5 L/min(b)速度分佈圖 at (X/D)≈2. 圖3.2-28 Re = 465, 0°動量注入 Q=0.5 L/min 之流場頻譜圖, 在 X=2.6D, Y=0.5D 處 圖3.2-29 Re = 465, 60°動量注入 Q=0.5 L/min 之流場頻譜圖,在 X=2.6D, Y=0.8D 處 圖3.2-30 Re = 465, 90°動量注入 Q=0.5 L/min 之流場頻譜圖, 在 X=2.6D, Y=0.8D 處 圖3.3-1 在 Re=800 之穩定動量吸入圓柱尾流流場影像及頻譜圖,其 中Uj/Uup=-4.97 圖3.3-2 在 Re=800 之穩定動量吸入圓柱尾流流場影像及頻譜圖,其 中Uj/Uup=-9.95 圖3.3-2 在 Re=1600 之穩定動量吸入圓柱尾流流場影像及頻譜圖, 其中Uj/Uup=-2.49
圖3.3-4 在 Re=1600 之穩定動量吸入圓柱尾流流場影像及頻譜圖, 其中Uj/Uup=-4.98 圖3.3-5 在 Re=2400 之穩定動量吸入圓柱尾流流場影像及頻譜圖, 其中Uj/Uup=-1.65 圖3.3-6 在 Re=2400 之穩定動量吸入圓柱尾流流場影像及頻譜圖, 其中Uj/Uup=-3.31 圖3.3-7 在 Re=3200 之穩定動量吸入圓柱尾流流場影像及頻譜圖, 其中Uj/Uup=-1.24 圖3.3-8 在 Re=3200 之穩定動量吸入圓柱尾流流場影像及頻譜圖, 其中Uj/Uup=-2.48 圖3.3-9 在 Re=800 下穩定動量吸入圓柱尾流流場於垂直方向速度擾 動之紊流強度分佈 圖3.3-10 在 Re=1600 下穩定動量吸入圓柱尾流流場於垂直方向速度 擾動之紊流強度分佈 圖3.3-11 在 Re=2400 下穩定動量吸入圓柱尾流流場於垂直方向速度 擾動之紊流強度分佈 圖3.3-12 在 Re=3200 下穩定動量吸入圓柱尾流流場於垂直方向速度 擾動之紊流強度分佈 圖3.3-13 在 Re=800 下穩定動量吸入圓柱尾流流場於垂直方向速度
分佈 圖3.3-14 在 Re=1600 下穩定動量吸入圓柱尾流流場於垂直方向速度 分佈 圖3.3-15 在 Re=2400 下穩定動量吸入圓柱尾流流場於垂直方向速度 分佈 圖3.3-16 在 Re=3200 下穩定動量吸入圓柱尾流流場於垂直方向速度 分佈 圖3.3-17 Re=465 0°動量吸出 Q=0.5 L/min 之圓柱後尾流場連續速度 向量分佈圖,週期 8 sec. 圖3.3-18 (a) At Re = 465, U∞= 22.1 mm/s, 0˚角動量吸出 Q = 0.2
L/min (b) velocity distribution at (X/D)≈2. 圖3.3-19 (a) At Re = 465, U∞= 22.1 mm/s, 0˚角動量吸出 Q = 0.5
L/min(b) velocity distribution at (X/D)≈2. 圖3.3-20 (a)At Re = 465,U∞= 22.1 mm/s, 30˚角動量吸出 Q = 0.2
L/min(b) velocity distribution at (X/D)≈2. 圖3.3-21 (a) At Re = 465,U∞= 22.1 mm/s, 30˚角動量吸出 Q = 0.5
L/min (b) velocity distribution at (X/D)≈2.
圖3.3-22 Re=465, 60°動量吸出 Q=0.2 L/min 之圓柱後尾流場連續速
度向量分佈圖, 週期 3.3 sec. 圖3.3-23 (a) At Re = 465,U∞= 22.1 mm/s, 60˚角動量吸出 Q = 0.2
L/min(b) velocity distribution at (X/D)≈2.
圖3.3-24 (a) At Re = 465,U∞= 22.1 mm/s, 60˚角動量吸出 Q = 0.5
L/min(b) velocity distribution at (X/D)≈2.
圖3.3-25 Re=465,90°動量吸出 Q=0.5 L/min 之圓柱後尾流場連續速
度向量分佈圖, 週期 3.8 sec. 圖3.3-26 (a) At Re = 465,U∞= 22.1 mm/s, 90˚角動量吸出 Q = 0.2
L/min(b) velocity distribution at (X/D)≈2.
圖3.3-27 (a) At Re = 465,U∞= 22.1 mm/s, 90˚角動量吸出 Q = 0.5
L/min (b) velocity distribution at (X/D)≈2. 圖3.3-28 Re = 465, 0°動量吸出 Q=0.5 L/min 之流場頻譜圖, 在 X=2.6D, Y=0.5D 處 圖3.3-29 Re = 465, 60°動量吸出 Q=0.2 L/min 之流場頻譜圖, 在 X=2.6D, Y=0.8D 處 圖3.3-30 Re = 465, 90°動量吸出 Q=0.5 L/min 之流場頻譜圖, 在 X=2.6D, Y=0.8D 處 圖3.4-1 在 Re=800, fos=0.3HZ 之往復動量圓柱尾流流場觀測,其中 Uslit/Uup=4.97, 水溫 30℃ 圖3.4-2 在 Re=1600, fos=0.3HZ 之往復動量圓柱尾流流場觀測,其中 Uslit/Uup=2.49, 水溫 30℃ 圖3.4-2 在 Re=2400, fos=0.3HZ 之往復動量圓柱尾流流場觀測,其中
Uslit/Uup=1.65, 水溫 30℃ 圖3.4-4 在 Re=3200, fos=0.3HZ 之往復動量圓柱尾流流場觀測,其中 Uslit/Uup=1.24, 水溫 30℃ 圖3.4-5 在 Re=800, fos=0.5HZ 之往復動量圓柱尾流流場觀測,其中 Uslit/Uup=4.97 水溫 30℃ 圖3.4-6 在 Re=1600, fos=0.5HZ 之往復動量圓柱尾流流場觀測,其中 Uslit/Uup=2.49 水溫 30℃ 圖3.4-7 在 Re=2400, fos=0.5HZ 之往復動量圓柱尾流流場觀測,其中 Uslit/Uup=1.65 水溫 30℃ 圖3.4-8 在 Re=3200, fos=0.5HZ 之往復動量圓柱尾流流場觀測,其中 Uslit/Uup=1.24 水溫 30℃ 圖3.4-9 在 Re=800, fos=0.3HZ 之往復動量圓柱尾流流場影像及頻譜 圖,其中Usilt/Uup=4.97 圖3.4-10 在 Re=1600, fos=0.3HZ 之往復動量圓柱尾流流場影像及頻 譜圖,其中 Usilt/Uup=1.24 圖3.4-11 在 Re=2400, fos=0.3HZ 之往復動量圓柱尾流流場影像及頻 譜圖,其中 Usilt/Uup=0.83 圖3.4-12 在 Re=3200, fos=0.3HZ 之往復動量圓柱尾流流場影像及頻 譜圖,其中 Usilt/Uup=0.62
圖3.4-13 在 Re=800, fos=0.5HZ 之往復動量圓柱尾流流場影像及頻譜 圖,其中Usilt/Uup=4.97 圖3.4-14 在 Re=1600, fos=0.5HZ 之往復動量圓柱尾流流場影像及頻 譜圖,其中 Usilt/Uup=1.24 圖3.4-15 在 Re=2400, fos=0.5HZ 之往復動量圓柱尾流流場影像及頻 譜圖,其中 Usilt/Uup=0.83 圖3.4-16 在 Re=3200, fos=0.5HZ 之往復動量圓柱尾流流場影像及頻 譜圖,其中 Usilt/Uup=1.24 圖3.4-17 在 Re=800 下往復動量注入圓柱尾流流場於垂直方向速度 擾動之紊流強度分佈 圖3.4-18 在 Re=1600 下往復動量注入圓柱尾流流場於垂直方向速度 擾動之紊流強度分佈 圖3.4-19 在 Re=2400 下往復動量注入圓柱尾流流場於垂直方向速度 擾動之紊流強度分佈 圖3.4-20 在 Re=3200 下往復動量注入圓柱尾流流場於垂直方向速度 擾動之紊流強度分佈 圖3.4-21 在 Re=800 下往復動量注入圓柱尾流流場於垂直方向速度分 佈 圖3.4-22 在 Re=1600 下往復動量注入圓柱尾流流場於垂直方向速度
分佈
圖3.4-23 在 Re=2400 下往復動量注入圓柱尾流流場於垂直方向速度
分佈
圖3.4-24 在 Re=3200 下往復動量注入圓柱尾流流場於垂直方向速度
第一章 前 言
1.1 研究緣由與動機 建築物、陡體(bluff body)或飛行體,有橫流(cross-flow)流過時, 在某些雷諾數下,結構表面會發生流場分離的現象,此現象會在建物 或 陡 體 末 端 流 場 形 成 週 期 性 的 尾 流 渦 漩(vortex),稱為渦漩剝離 (vortex shedding),若其流場特徵頻率接近建物或結構體本身的自然振 動頻率時,會引致結構物發生振動,例如:交換圓管的振動、海底電 纜的擺動,此振動現象往往會造成結構的破壞。著名的Tacoma 橋, 受側風影響引起共振,導致斷裂就是一個典型的例子。因此,探討尾 流內渦漩的現象,流體與固體的交互作用,並進一步控制此渦漩流 場,是長久以來,學者研究的重要課題。 1.2 文獻回顧 圓柱尾流流場 Lienhard(1966)針對單一圓柱體研究得知,在 300<Re<20000 範圍 內,史卓荷數(Strouhal Number)大約都保持在 0.21 左右之常數值(如 圖1-2 所示),且在雷諾數達某一值的情形下,將尾流歸納為以下的 型態。當 Re<5 時,橫流通過圓柱體沒有流場分離的現象,也沒有 尾流的形成。當 5<Re<40 時,橫流通過圓柱體會有流場分離的現 象,會有對稱性渦漩結構的尾流形成。當雷諾數更高,介於150 和 300 之間時,圓柱末端形成交替出現的週期性渦漩結構尾流。當 300<Re<150000(次臨界值)時,圓柱表面的層流邊界層(Laminar Boundary Layer)分離,圓柱末端渦漩剝離的現象,更強更明顯尾流場的控制
以單一圓柱而言,Strykowski and Srineevasan(1990)置放細小
圓柱於剪流層內,成功地消除了尾流區的渦流結構。Sakamoto et al.
(1991) 置放細小圓柱於剪流層內,有效降低作用於方體的擾動壓 力。Igarashi and Itoh (1993)在方形體的上游放置細小柱體,結果顯
示作用於物體的平均阻力降低。其後 Munshi and Modi(1997)將方
形體上游之放置可旋轉式細小柱體亦成功延後 seaperation piont
以及方體振動。Sakamoto and Haniu (1994) 在主要柱體近處放置細
小 圓 柱 當 控 制 柱 體 , 歸 納 出 尾 流 和 柱 體 所 受 擾 動 的 特 性 。 Gopalkrishnan et al. (1994) 利用擺動的翼狀薄片 (flapping foil) 置 於尾流區,發現流場會有建設性干涉及破壞性干涉的不同型態。
另外也有以自體擺動的技術來達到控制的目的,如 Gursul et al.
(1995)以機翼自體擺動的方式,控制尾流渦漩的位置,Chyu and Rockwell (1996)利用圓柱體自體輕微晃動的效果,成功地控制尾流
的結構。其後亦有Tao 與 Huang(1996)以熱線測速儀(Hot film)在圓
柱後尾流所節取之訊號做為對圓柱外施振動振幅與頻率之依據,
大幅提升尾流之 feedback control 可能性。可見在尾流場中輸入一
個特定頻率的干擾,能有效地影響尾流場。Lee and Kim (1996)將 柱體表面纏繞三條細小螺旋線條,成功地降低柱體末端流場的渦 漩剝離頻率,並縮小尾流的寬度。最近,Sakamoto et al. (1997)將
小平板同樣放於方形體的上游,發現平均阻力降低 75%,升力和
阻力的擾動值分別下降 95%和 80%。
注入流體動量以控制流場的相關研究
利用質量注入的技術來改變二維機翼的紊流渦漩的結構。Modi et al. (1993) 發現使用動量注入的技術,可以延遲流場分離的現象, 並提高升力、降低阻力。Munshi et al. (1996) 建議透過動量注入的 技術,可以大大降低柱體表面的阻力及有效控制流體引致不穩定 的特性。Gunzburger(1996)以數值模擬圓柱體表面單一狹縫與雙 狹縫可對圓柱後方提供週期性動量,發現此法能改善圓柱穩定 性。Tang(2000)利用數值模擬圓柱後方安置一對 sources,大幅 消弭了圓柱尾流。可見,注入流體,可以有效地影響欲控制的流 場。 1.3 研究重點 參考相關研究,除了一般用穩態、注射或吸吮(steady injection or suction)的方式去影響流場,以更進一步採用來回振盪的噴流 (oscillatory jet)以圖應用不同的注入頻率,達到建設性或破壞性 的干涉,以改變流場達到控制的目的。這種振盪噴流是不穩定的 (unsteady),可調節頻率與振幅。在適當的雷諾數下,尾流後的 渦流,也具有一定的頻率。(St = fD/U~0.2),渦流受影響的情形(例 如:增強或消失),應與這二頻率的比值,有一定的關係,在不同 的頻率強制干擾下尾流場內的渦流結構有何變化,也是研究的重 點。探討的重點可概分為: (1)未激擾下之圓柱後尾流發展。 (2)穩態(steady)激擾,不同的圓柱表面加入不同大小的激擾, 對尾流場的影響。 (3)非穩態,以振盪的方式注入-吸出流體於尾流場中,探討不同 的激擾頻率下,尾流的變化情形如何,其中包含兩個可變參數,
第二章 實驗儀器設備
2.1 儀器設備 2.1.1 水洞 本實驗採用低速水循環系統,如圖 2.1-1,最高流速為 0.7m/s, 採用封閉之循環系統。主要包括抽水馬達(pump)、浮子式流量計 (flowmeter)、擴散段(diffusion section)、過濾網(filter)、整流箱(settling chamber)、蜂巢式整流器(honeycomb)、多孔性隔板(screen)、漸縮段 (contraction section)、測試段(test section)、儲水槽(reservoir)。馬達之工作電壓為三相220V,最大馬力為 10hp (最大揚程為 32m)並藉由一 外接變頻器的輸出頻率來調整馬達轉速,以達到控制整個循環系統中 流體的流量與流速。工作流體通過浮子式流量計後可測得當時流量, 之後通過濾網避免不必要之雜質及懸浮物,使流場保持清潔避免對量 測產生干擾。再進入擴散段使流體能均勻的進入邊長各為 600mm 之 整流箱,隨後進入整流段,通過蜂巢式整流器與數個多孔性隔板以減 少紊流之發生並增加流場之均勻性。再經過收縮段繼續維持流場的均 勻性。收縮段為一入口 600mm × 600mm 之矩形截面而收縮成出口 200mm × 200mm 之矩形截面並與測試段相連接。測試段,如圖 2.1-2,為了觀測的方便因此材質為透明之壓克力板,在前方可安裝皮
托管以量測均勻流之平均流速,而測試段的截面積為 200mm × 200mm。測試段後工作流體進入儲水槽,形成一封閉循環系統,儲水 槽尺寸為 1.2m × 0.8m × 0.8m,主要功能為確保其餘實驗部分皆能 保持在滿水的狀態以維持整個流場的穩定運動。 進行本實驗時,測試段置入一長200mm,直徑為 19mm 之圓柱, 圓柱管材質為不銹鋼,將其置於流場橫過測試段,兩端分別與壓克力 壁面接合,而圓柱上有一寬度為1mm 之狹縫,如圖 2.1-3,圓柱可經 由外接管路與一直流馬達相連,藉由直流馬達可用來注入與吸出動 量,以對圓柱後流場產生動量的干擾作用。 2.1.2 動量干擾系統 動量由圓柱表面注入尾流區,在實驗中所調整的狹縫角度分別為 0˚、30˚、60˚及 90˚,如圖 2.1-4 所示。產生干擾尾流的方式有兩種, 一種為穩定注入/吸入(Steady Injection/Suction),一種為往復式注入 (Oscillatory injection-suction),其方式如下: 穩定注入/吸入方式: 此種流體注入尾流的方式,如圖 2.1-5 所示,以一直流馬達外 接電源供應器配合管路與圓柱相連,藉由調整電源供應器之電流與 電壓大小來控制馬達的轉速,再利用直流馬達正負極互換來調整注
入或吸出的動作,並配合一流量計,測量當時由圓柱狹縫注入或吸 出的流量大小,最後從圓柱體上之狹縫噴出。 往復式注入方式: 本實驗製作一往復式的運動機構,如圖 2.1-6 所示。以一直流 馬達帶動一飛輪,透過鏈桿,造成活塞往返式的運動,此活塞連 接至測試圓柱的內部,可對尾流造成一週期性的干擾。干擾的大 小與頻率可由一信號產生器加上放大器,藉以調整直流馬達的大 小與頻率來完成。干擾的頻率可由信號產生器的讀數得到,干擾 的振幅以通過狹縫最大的平均速度Ujmax表示之,此速度可由活 塞的截面積與其運動的振幅和頻率計算而得。 2.2 全面性流場量測 2.2.1 PIV 系統 為全面性的瞬時流場觀測,自組一套PIV 系統可量測本實驗的水 流流速。此系統主要包括-雷射光組,光學鏡片,圓柱透鏡,CCD 及影像擷取系統,如圖2.2-1 所示。由一 1 W 的雷射作為光源(America Laser Model 990),雷射光經過一圓柱透鏡產生光頁。同時為了避免發 散之雷射光束通過圓柱透鏡後產生的雷射光頁過厚而影響實驗之準 確性,實驗中先利用反射面鏡將雷射光束引導至第一片凸透鏡,再通
過焦距較短之第二片凸透鏡,兩面凸透鏡之間距為其焦距之和,然後 將已逐漸發散之雷射光束縮小使成為平行光源(圖 2.2-2),降低其發散 的可能,並使用平面鏡將光束反射經由圓柱透鏡而在測試段形成雷射
光頁。實驗所使用的顯影粒子為 DANTEC 出品之 PSP(Polyamid
Seeding Particles),主要材質為 Polyamid 12,平均直徑為 50µm,密
度為 1.03 / cm3
g ,反射率為 1.5,其外形為近似球形。實驗中利用
CCD(charge- coupled device) 攝影機配合影像擷取卡獲得顯影粒子在 流場中的運動情形,由於此粒子很小,密度又與水接近,所以以粒子 速度代表水流場的流速。CCD 攝影機的型號為 Kodak MegaPlus ES-1.0/10,有效解析度 1008×1018,灰階的分布可以到達 2 的 10 次 方。另外,與CCD 配合之鏡頭為 Nikon AF Micro 60/2.8D,其最短之 拍攝距離為 0.219m。影像擷取卡為 EPIX 出品之 PIXCI D/D2X 並配 合影像擷取軟體XCAP 紀錄流場影像。 2.2.2 影像數據分析 一般來說,PIV 的基本實驗設備包括雷射光源、光頁產生元件、 適當的質點以及CCD 攝影機。經由 CCD 在短暫時間區間∆t所紀錄下 來的連續兩張流場影像,並加以數位化後可以得到, I1(i, j) 以及 I2(i, j)
其中1≤i≤M ,1≤ j≤ N 。而M×N 為數位化之後的流場影像總畫數 (pixels)。 為了要分析流場影像中的局部位移,因此將流場影像切割為次區 塊(interrogation),分別為I1P與I2P,而次區塊總畫素為m×n。因為質 點的位移比其本身的平均間距大,因此要在兩張影像中找出相同的質 點並一一作比對是很困難的,此時必須使用統計學上的方法來分析流 場中質點的位移,而本實驗中所使用的方法是cross-correlation。其做 法是固定其中一個影像,並將另一影像與之作相對的位移,找出其相 關性C,
∑ ∑
= = ∆ + ∆ + ⋅ = ∆ ∆ m i n j P P i j I i x j y I y x C 1 1 2 1 (, ) ( , ) ) , ( 其中−m≤∆x≤m,−n≤∆y≤n。同時並將其正交化(normalize)後可以得 到, 2 1 1 2 2 1 2 1 1 2 1 1 1 1 2 1 ] ) , ( [ ] ) , ( [ ) , ( ) , ( ) , (∑
∑
∑
∑
∑ ∑
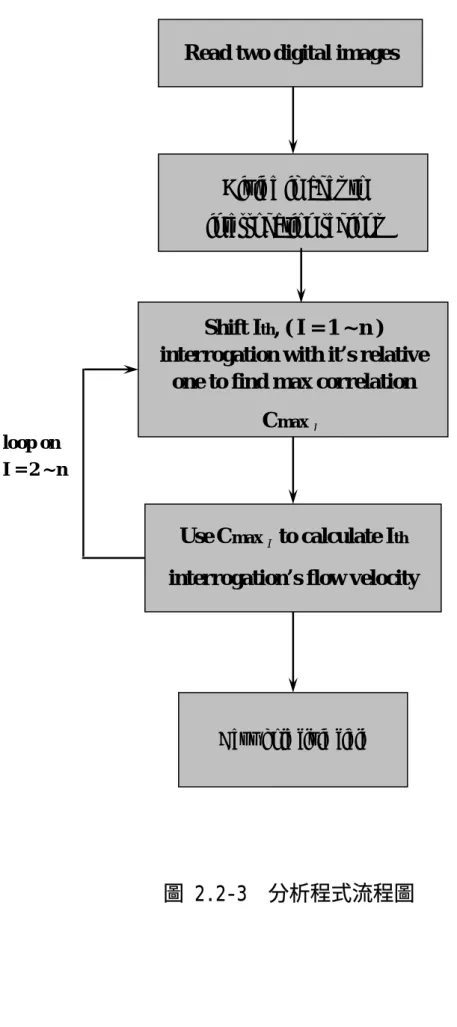
= = = = = = ⋅ ∆ + ∆ + ⋅ = ∆ ∆ n j P m i n j P m i m i n j P P n j i I j i I y j x i I j i I y x C 中−1≤Cn ≤1,而正負號即代表流場位移的方向。利用cross-correlation 分析後將會出現一個最高的峰值,即為最大相關性Cnmax,則相對於此最大的相關性的平移∆S(∆x, ∆y)即為質點的位移,亦即流場的位 移。將此位移與鏡頭的放大率(M ′)作運算再除以時間間距∆t則可以得 到流場的局部速度。 t y x S M v u V ∆ ∆ ∆ ∆ × ′ = ( , ) ) , ( v 而重複上述步驟,計算出流場中每一個interrogation 所代表的局 部速度,則可以獲得整個流場的速度向量。 根據上述相關性(correlation) 的方法,可以 Fortran 程式編寫出計 算速度向量的分析軟體,程式的流程如圖2.2-3。首先將 CCD 所記錄 下來的影像加以數位化,流場影像數位化的步驟之前,可先調整影像 的明亮對比,使有包含 particle 的影像灰階數值與流體本身的灰階數 值之對比增加,如此一來可增加流場 particle 之分布密度,同時避免 過高的流體灰階數值影響到分析時的準確性。影像數位化後,將兩個 已數位化的影像分別依序劃分為數個次區域(interrogation),利用
cross-correlation 將兩互相對應之 interrogation region 加以分析,得到 最有可能之質點位移,重複此步驟而獲得整個影像中完整的質點位 移。利用此方法最大的好處是可以直接得到質點的位移向量而不需再
加以判斷流場的運動方向。以本實驗來說,每個數位化的流場全影像 包含1018 ×1008 個數值。在 interrogation 解析度選取方面,首先將一 由實驗中所實際得到的流場影像數位化後加以人工位移,並測試在不 同的interrogation region 解析度下所得到結果的穩定性,如圖 2.2-4 及 圖2.2-5。由圖中可發現在位移畫素(pixel)很小時[(x, y): (5, 10)],在測 試的四種解析度下均可獲得很好的穩定性。然而如果將位移畫素增大 時[(x, y): (30, 20)],則 interrogation 的解析度需要到 60 ×60 以上才可 以得到較佳的結果。因此在之後實驗的分析上,將採用 interrogation 解析度為70 ×70 (pixels by pixels),使得無論是分析較小或較大的質 點位移時都可獲得較穩定的結果。同時包含 50% 之重疊率而最後可 以得到27 ×27 個速度向量。 2.2.3 誤差 由於在尾流流場中會產生一些進入雷射光頁與離開雷射光頁的 質點運動(out-of-plane motion)如圖 2.2-6 所示,而這些質點將影響實 驗結果的準確性,造成分析上誤差的產生。再者,由於PIV 之實驗是 假設質點在理論上要完全跟隨著流場移動,並藉由量測質點的位移而 間接得到流場位移。但是事實上質點並不會全然地隨著流場位移,引 此造成誤差的產生。Agui J. C. 以及 Jimenez J. (1987) 針對此一現象
提出一方程式來預測因質點未完全跟隨流場移動所造成兩者間相對 的滑動速度誤差( slip velocity, ∆u), ν ρ ρ 10 ) ( ) ( 2 2 2 d f u u = ∆ P ∆ 其中∆ρ是流體與質點的密度差,ρ是流體密度,dP是質點直徑,f 是 流場的特徵頻率,而ν 則是流體的黏滯係數。 若針對此項誤差以上述之經驗公式計算下,在本實驗中雷諾數為 465 時之流場特徵頻率為 0.23Hz,而相對滑動誤差為 0.024%。而雷 諾數為535 時之流場特徵頻率為 0.27Hz,而相對滑動誤差為 0.026%。 另外一方面,PIV 的分析必須先利用 CCD 將流場影像記錄下來, 但是如果在實驗中由於(1)有太多未在雷射光頁上移動的質點,(2)分 析影像中缺乏成對的影像質點,以及(3)在質點影像中存在著高速度梯 度,則同樣會造成分析上誤差的產生。 而 在 軟 體 分 析 所 造 成 的 誤 差 方 面 , 由 於 實 驗 中 所 利 用 的 Cross-correlation 是將兩個相對的 interrogation 作相對位移,而位移的
基本單位是一個 pixel,但 particle 的位移並不會是剛好為一個 pixel
的整數倍,因此會有誤差的產生。所以需利用較大的空間解析度 (spatial resolution)以彌補此一誤差。
2.3 局部流速量測 熱膜測速儀(Hot-Film)常被使用來量測水流場的局部流速。本實 驗在流速量測上使用 DANTEC 公司的 CTA 56C01 熱膜測速儀 (Hot-Film Anemometer)、CTA 56C17 電橋界面,使用 55R011 型之探 針(Probe),此探針為直徑 70μm 鎳金屬線,探針長度 3mm,在外附 加 2μm 的石英薄膜(Quartz Coating)保護探針,其安裝如圖 2.3-1 所 示。測速儀操作在等溫模式, Hot-Film 的輸出電壓與流速關係曲線
由一皮托管校準。Hot-Film 的輸出電壓以 IOTECH 所生產的 IEEE488
類 比 數 位 轉 換 擷 取 系 統(A/D Converter) 記 錄 , 擷 取 速 度 最 快 為 100kHz,有 8 個頻道可同時做擷取,其輸入訊號上下電壓極限最大為
±10V,依照實驗所需調整適當的電壓範圍,緩衝器記憶體(Buffer
storage)容量為 2K,依需求最大可擴充至 4096K。驅動的方式基本上 分 為 外 接 訊 號 驅 動(External Signal Trigger) 及 內 部 驅 動 (Internal Trigger)等。外接訊號驅動為外接一驅動訊號源,如脈衝產生器(Pulse Generator),可配合流場觀測儀器,產生訊號來控制流場觀測與量測 訊號擷取的同步性及相位。本實驗採用內部驅動擷取方式,內部驅動 主要是直接驅動擷取;或是設定訊號相位與電壓值在某一大小時開始
訊號轉換成數位訊號後,透過個人電腦觀察與紀錄。 2.4 流場可視化 本實驗為增強雷射光頁(Laser-Light Sheet)所折射之影像清 晰,於測試段上游,即圓管前方 4cm 處,將染料注入於安裝一整齊 排列細小圓管 Seeding(染料注入圓管直徑 0.09mm)中,以其圓管直 徑細小可忽略對流場之干擾。圓管注入染料,藉由雷射光頁打入可 反射出清晰煙線(Streak Line)影像,原理在於雷射光打至煙粒上會產 生散射現象,因而流場可經由可見光的散射在 CCD 攝影機上清楚 記錄到。此外再加入螢光性質點(Fluorescent Particles),補強描述煙 線以外之流場情況,如圖 2.4-1 所示。為了取得流場渦漩的動態剝 離特色,本實驗使用之主要儀器為雷射光源、CCD 攝影機、聚光鏡、 影像擷取卡、影像分析軟體及圖像處理軟體,以記錄渦流的形成及 剝離過程。 2.5 力的量測 應變規(Strain Gauge)可用以量測微小的應變,只要配合惠斯同電 橋、放大器、濾波器、電壓擷取系統所組成的設備,如圖2.5-1,就 可用來測量應變規的電壓變化。在此利用應變規來量測圓柱的受力, 將原本支撐圓柱的固定支架稍作改變,利用不鏽鋼圓棒與平板,將其
焊接成如圖2.5-2 所示,兩端為直徑 2mm 圓棒而中間是厚度為 1mm 平板,固定端連接上下方之固定處,受力端則與圓柱連接,則平板部 分可以裝置應變規來測量形變,將此固定支撐架裝置在圓柱的上下 端,要量測的數據有CD與CL,在量測CD值時,由於drag 力方向是沿 著流場方向,故平板方向需平行流場的方向,當圓柱受到力作用時會 經由圓棒帶動平板彎曲,貼有應變規那面的平板將會因為受CD之力 作用而拉伸或是壓縮。而在量測CL值時,由於lift 力方向是垂直於流 場方向,故平板方向需垂直流場的方向。所以為了同時量測CD與CL, 圓柱上下方各裝置一個應變規,其平板方向分別平行和垂直於流場方 向,就可以同時擷取到受CD和CL力時所產生的電壓變化。
第三章 實驗結果
3.1 無干擾之圓柱後尾流場 3.1.1 流場可視化觀察 實驗於未注入動量之單圓柱後尾流流場之最主要目的為:可證明 實驗儀器及量測方法的可靠性,以及以未注入動量之單圓柱後尾流流 場得到的實驗資料,作為注入/吸入及其往復式噴吸於圓柱後尾流流 場分析之相關情形比較與參考基礎。在本實驗量測時,將圓柱管置於 測試段距上下板約為中央位置,以避免圓柱後尾流與上下板間產生交 互干擾的現象。本實驗在不同雷諾數(Re=800~3200)下的流場中進行 實驗,由尾流可視化觀測結果如圖3.1-1 至圖 3.1-4 所示,發現圓柱後 尾流於一個週期內,渦漩連續變化的結果,於圓柱後方有兩運動方向 相反附著的渦漩,這兩個附著的渦漩在一個週期變化中,當其中的一 個渦漩先往下游拉伸,將吸引另一個渦漩靠近,上方渦漩因拉伸而破 壞,直到被下游渦漩切裂,且產生順時針方向旋轉的完全脫離獨立的 渦漩,緊接著下方渦漩亦是如上方渦漩般拉伸後被上方逐漸產生渦漩 切割,於下方產生另一獨立脫離的逆時針旋轉運動的渦漩,渦漩交替 性運動出現於中心線兩側。本實驗利用高速攝影機拍下的畫面,其畫 面時間間隔固定為1/60 秒,經可視化觀察,可清楚描述圓柱後尾流於不同雷諾數下之週期變化,其中當Uup為0.0402 m/s、0.0804 m/s、 0.1211 m/s、0.1611 m/s,其週期 T 分別為 2.35 sec、1.19 sec、0.79 sec、 0.60 sec,再計算史卓荷數 Strouhal Number,發現與 Lienhard(1966) 研究所得到的史卓荷數(St=0.21)很接近,證明了實驗資料的可靠度。 雷諾數對於渦漩剝離頻率(fs)與 wake region 是一重要參數。隨著雷諾 數增加,流場慣性速度增加,依據史卓荷數定義,渦漩剝離頻率亦相 對增加。由圖3.1-1 至圖 3.1-4,藉由數位相機擷取側面圓柱後尾流影 像中即可發現隨上游流速Uup增快,週期T 跟著縮短,亦即渦漩剝離 頻率有增加趨勢。 3.1.2 速度分佈 為了測試流體在無流經圓柱的情況下是否為均勻的2-D 流場,因 此實驗首先以PIV 做此方面之觀測。由圖 3.1-5~6 可看出在固定雷諾 數下,流場在沒有流經圓柱時均能保持一定的均勻性。同時經由PIV 之分析可得到流場的流速在水平方向分別為為22.1(mm/s),而相對應 的垂直方向速度均很小。經由此一分析可以確保之後的實驗流體在通 過圓柱前之上游為一穩定均勻的流場。 圖 3.1-7 為雷諾數等於 465 時,無動量干擾之圓柱尾流的速度向 量與速度分佈,由圖中可以看出在此雷諾數下流場的之渦漩剝離週期
大約為4.8 秒。由圖中可以看出流體在流經圓柱後所產生的渦漩剝離 (vortex shedding)的現象,尾流區有明顯的上下交替渦漩(vortex)出 現。其次,由速度分佈圖可以發現尾流區的速度遠比上下兩剪力層 (shear layer)外的流場速度低,這是因為流體能量因邊界效應無法傳遞 至圓柱後方,而造成分離點(separation point)的產生同時因剪力層內外 的速度梯度(velocity gradient)而造成渦漩的產生。另外由圖中可以看 出尾流區的縱向寬度大約是Y = 1.5~2D。 3.1.3 頻譜分析 圖3.1-8 至圖 3.1-11 是由 Hot-Film probe 量測於測試段中位置 X/D=3.5,Y/D=1.0,從 Hot-Film 實驗數據經由快速傅利葉轉換(FFT), 得到其圓柱後尾流剝離之主要頻率分別為0.43 HZ、0.83 HZ、1.27 HZ、1.71 HZ,可發現隨流速 Uup增快,渦漩剝離頻率fS 有增加之趨 勢,即當Re 愈大,則相對有較大的 fS值,經計算史卓荷數St 也發現 其值也約為0.2 左右,因此,可更進一步驗證本文利用水洞實驗所取 得之資料是有效的。 3.2 穩定動量注入 3.2.1 流場可視化觀察 本實驗在不同雷諾數(Re=800~3200)下,以不同穩定動量衝擊單圓
柱後尾流流場,發現明顯改變圓柱表面產生之速度邊界層,受到圓柱
後狹縫噴出固定Uj之穩定動量激擾圓柱後渦漩,使得分離點(Point of
Separation)位置的改變影響了原本固定規律的渦漩剝離方式。在邊界 層理論(Boundary Layer Theory)上,圓柱後尾流渦漩剝離發生位置在圓 柱表面速度邊界層中分離點的後方,當分離點愈往後延遲其渦漩亦相 對延後發生。在本文 3-1 中之圓柱尾流,說明了當主流之流體離開物 體表面,則流場會有渦漩相互交替於中心線之分離流,但本文 3-2 探 討由於圓柱正後方中心位置處噴出固定 Uj 反將此流入圓柱後尾流之 流體強制衝擊向下游推,影響了圓柱表面之邊界層分佈。由圖 3.2-1 至圖 3.2-8 所示與之前圖 3.1-1 至圖 3.1-4 流場影像觀察比較,發現穩 定動量注入會影響到圓柱後尾流渦漩結構,隨著 Uj的增加,圓柱後尾 流區之區域則縮小,圓柱後產生尾流影像中垂直方向寬度有變窄的趨 勢,同時也可發現,當 Re 增大,其圓柱後尾流渦漩剝離也往愈下游 產生,而且於激擾下其圓柱後尾流渦漩剝離所受到之消弱之尾流區域 也延緩往愈下游。 3.2.2 速度分佈與頻譜分析--熱膜探針量測結果 紊流強度 由圖3.2-9 至圖 3.2-12 所示於不同 Re 下,穩定動量注入圓柱尾
流流場於垂直方向速度擾動值之紊流強度分佈,可發現圖中 0 / up = j U U 之速度擾動值分佈都比圖中其他的U /j Uup來得高,顯然在 未注入圓柱後尾流流場之紊流強度是較大的,隨著注入圓柱後尾流流 場之動量增加,紊流強度也明顯的下降,紊流區域也說縮小。這很可 能是由於動量注入破壞原本週期性的渦流結構,流場變得相對地穩 定,紊流強度因此減小。因此,尾流流場可以動量注入的方式控制紊 流強度。 頻譜分析 圖3.2-1 至圖 3.2-8 中的頻譜圖為用 Hot-Film probe 獲得的速度頻 譜。圓柱後尾流之主要頻率fS ,在有動量注入下的情況與未注入動 量之尾流的剝離頻率相差不多,但隨著注入動量愈多,頻譜中在特徵 頻率的振幅也隨之下降,而趨於不明顯,這結果驗證了上述的說法: 動量注入會破壞原本週期性的渦流結構。 速度分佈 在圖3.2-13 至圖 3.2-16 於不同 Re 下穩定動量注入圓柱尾流流場 於橫方向(cross stream)的速度分佈,由圖 3.2-13 至圖 3.2-16 中 0 / up ≠ j U U 所示,可發現圓柱後噴出之動量在速度分佈流場圖中呈現 上凸的曲線,在區域-0.5≦Y/D≦0.5 處為大略凸起之位置。由於這些
圖中所給定的動量是固定值,也就是細縫噴出水之流速Uj是固定的, 當 Re 增大時,速度分佈在中間凸起的趨勢漸減,甚至呈現下凹的曲 線,如圖3.2-16 中Uj/Uup =1.24所示。可說明在相同注入量時,當 Re 增大,也就是說流速Uup增快,其圓柱後尾流本身噴出的Uj若不足夠 則不足以抑制尾流流場的渦流結構,換言之,流速Uup愈大相對要注 入更多穩定動量,才能得以求得預期抑制渦流結構之效果。 3.2.3 PIV 觀測結果 為了破壞圓柱後方的尾流結構,避免流場存在著一固定頻率,首 先在尾流場中穩定注入一動量干擾,而注入之動量角度分別為 0˚、 30˚、60˚及 90˚,並且期望藉由穩定動量的注入能使分離點( separation point )延後發生,使流體能量能傳遞至圓柱後方降低前後壓差,進而 避免尾流結構的產生及流體引致結構震動的發生。同時探討尾流區的 寬度在受到動量注入後所產生的變化,在此定義的尾流區寬度所指的 是速度與上游之均勻流速相較之下突然減小、方向改變以及混亂跳動 的速度流場所包含的區域稱之。藉由觀察尾流區所影響的範圍可以瞭 解到在各種角度下注入動量,是否可以達到所預期破壞尾流結構的效 果。 無角度動量干擾
圖 3.2-17 為 Re=465 時在圓柱後方 0˚穩定注入動量的體積流率 Q=0.5L/min 之連續流場的運動情形。從圖 3.2-18 ~19 之瞬時流場圖中 可以發現,在經由穩定注入動量後雖然仍存在著由於速度梯度所造成 的尾流場,但由圖3.2-17 中可發現,尾流場中已無明顯之固定頻率以 及完整的渦漩出現。而當注入之動量較小時,尾流區的寬度並未因此 而產生顯著的變化,但隨著注入動量的增加(由 0.2 L/min 增加至 0.5 L/min),尾流區的縱向寬度也由 Y = 2D 減少至 Y = 1D 左右。顯示注 入動量的多寡不但能破壞因尾流發生而產生的流場頻率,並且能改變 尾流場的結構,使分離點延後發生,讓上游之流體能量更能夠傳遞至 圓柱後方。而在注入動量為0.5 L/min 時,圖 3.2-19(b)中可發現在靠 近圓柱之尾流區外的流場因為受速度梯度的影響而分別出現向尾流 流動的趨勢,另外在靠近尾流區的水平速度也較小,隨著逐漸遠離尾 流區而恢復成上游速度。 有角度的動量干擾 圖3.2-20 ~ 21 為調整注入動量角度為 30˚時流場的運動情形。由 圖中可看到當動量注入後圓柱下方原本的均勻流場開始變為較圓柱 上方之流場混亂,同時隨著注入動量的增加,有角度的動量干擾阻擋 了原本從上游要通過圓柱下方的流體,使得圓柱下方的均勻流場形成
一傾斜的分布。另外,由於注入動量的增加,使得流場的運動更為混 亂,甚至造成部分質點出現不是平面的流動,形成未順著雷射光頁運 動的情形發生,使得在分析上產生誤差,原因是在流場影像中缺乏太 多成對的影像質點,這也就是在分析後出現一些過大的速度向量的主 要原因。從圖3.2-20(b)可以看出,在 X/D = 2 附近由於流場速度很低, 可以發現此處附近的流體會朝負 X-方向流動。而從動量注入對尾流 區範圍影響的部份來說,當注入的動量較小時(Q = 0.2 L/min),尾流 區的縱向寬度與未注入動量時並無太大的差異,只是流場較為混亂而 已。而當注入之動量增加至Q = 0.5 L/min 時,由於動量干擾的影響, 使得尾流區的寬度在X/D = 2 時增加至 Y = 2.5D 左右。另外,在注入
動量Q = 0.5 L/min 時,圖 3.2-21(a)中可以發現在 X/D = 4,Y/D 介於 1 與 2 間的流場因受速度梯度的影響而有向下捲入形成渦漩的趨勢。 尾流區寬度增加的原因是因為圓柱向下旋轉 30˚注入動量後,使得原 本尾流區與下方均勻流之間的剪力層也跟著向下傾斜一角度,而傾斜 的剪力層內外的速度梯度也造成了尾流區寬度的擴大。 圖3.2-22 為繼續旋轉圓柱使動量注入為向下 60˚之連續流場運動 情形,首先從瞬時的流場圖 3.2-23~24 中可以看到,由於動量的注入 使得圓柱下方原本的均勻流場變的更為混亂,同樣的原因也是因為缺 乏太多成對的質點導致分析後出現一些數值過大的誤差向量。同時也
可以發現因為注入動量角度的增加,使得圓柱下方由上游流過來的均 勻流更加無法通過,尤其是在動量增加到 Q = 0.5 L/min 時,在圖 3.2-24(a)中只有在左下角可以看見一小部分來自上游的流動出現。尾 流的寬度也因為動量干擾的角度增加,而隨著剪力層向下傾斜而增 加。在圖3.2-23 (b)與圖 3.2-24 (b)中可以發現,尾流區的寬度在位置 在X /D = 2,注入動量為 0.2 L/min,時,大約是 Y = 3D,而當注入 動量增加至0.5 L/min 時,尾流區的寬度更是已經超過 3.5D。另外, 與注入動量角度為 30˚時類似的情形是,當注入動量增加,Q = 0.5
L/min,圖 3.2-24 (a)中在 X/D = 4,Y/D 介於 1 與 2 間的流場同樣會因 為速度梯度的增加而有向下捲入的情形發生。 圖 3.2-26~27 為旋轉圓柱使動量干擾至向下 90˚時流場的運動情 形,圖3.2-25 則為其連續之流場運動情形。由圖中可以清楚的看到因 為受到垂直向下的動量干擾影響,在分析的流場影像中,圓柱下方已 經完全沒有看到從上流方向流過的速度向量,取而代之的是更大範圍 的尾流場。由於垂直向下的動量干擾已經完全阻擋了由上游方向而來 的運動,因此,從圖3.2-26 (b)與圖 3.2-27 (b)中可發現,尾流之寬度 在X/D = 2 處都已經超過 3.5D,甚至在注入動量為 0.5 L/min 時,已 經到達4D 以上。並且尾流的寬度有隨著 X 方向而繼續擴展的趨勢, 在圖中可發現圓柱上方的均勻流場因為尾流寬度的發展而呈現一傾
斜的分布。另外在圖3.2-26 (a)~ 圖 3.2-27 (a)中,雖然在圖上無法有 效地清楚描述出流體的詳細運動情形,不過從圖中可以看到在尾流區 內的流體速度與上方之均勻流速相差很多,甚至在X/D = 4 處的流體 速度依然很低,顯示在這種動量干擾模式下,上游流體能量非常難以 傳遞至圓柱後方。 從圖 3.2-25 中也可發現流場中已無固定之流場特 徵頻率存在。 圖 3.2-28~圖 3.2-30 分別為在 Re=465 於圓柱後方 0˚、60˚與 90˚ 時穩定注入動量之頻譜圖。圖3.1-28 中,在探針的位置上已無固定之 渦漩剝離頻率產生,與上述利用PIV 量測而得的結果符合,在圓柱後 方 0˚時注入動量可抑制渦漩剝離產生。而在 60˚與 90˚時穩定注入動 量後,尾流區內所產生的則是不固定的特徵頻率。 藉由上述之分析與觀察大致上可以歸納出穩定動量的注入在0˚ 時,可以減小尾流所影響的區域範圍,但是當動量干擾的角度開始旋 轉增加時,因為注入的動量阻擋了從上游而來的流體,改變了剪力層 的角度,同時也增加了尾流所影響的區域。而在動量注入的情況下, 流場中不會有明顯固定頻率的渦漩剝離發生。 3.3 穩定動量吸出 3.3.1 流場可視化觀察
接著在不同雷諾數(Re=800~3200)下,以不同穩定動量吸入於單圓 柱後尾流流場,受到圓柱後狹縫吸入固定Uj之穩定動量激擾圓柱後渦 漩,實驗中發現明顯改變圓柱表面產生之速度邊界層,使得分離點位 置的改變影響了原本固定規律下之尾流頻率所產生的渦漩剝離方 式。本節所探討是圓柱正後方中心位置處將圓柱後尾流之流體強制吸 出,破壞下游圓柱後尾流渦漩之結構,影響了圓柱表面之邊界層分 佈。由圖 3.3-1 至圖 3.3-8 所示,與未吸之前,如圖 3.1-1 至圖 3.1-4 流場影像觀察比較,發現穩定動量吸出尾流會影響尾流的渦漩結構, 隨著吸出的平均速度值Uj不斷增加,圓柱後尾流渦漩就愈靠近上游圓 柱,圓柱後尾流渦漩剝離,有被消弱和破壞之現象,其尾流區域產生 之渦漩也愈不明顯。 3.3.2 速度分佈與頻譜分析--熱膜探針量測結果 紊流強度 由圖 3.3-9 至圖 3.3-12 所示於不同 Re 下,穩定動量吸入圓柱尾 流 流 場 於 垂 直 方 向 速 度 擾 動 值 之 紊 流 強 度 分 佈 , 可 發 現 圖 中 0 / up = j U U 之速度擾動值分佈都稍比圖中其他的U /j Uup值來得高,顯 然在未注入圓柱後尾流流場之紊流強度是較大的,隨著吸入圓柱後尾 流流場之動量增加,速度擾動值下降,相對紊流強度也下降,從圖中
可了解穩定動量注入圓柱尾流流場於橫向(cross stream direction) 速 度擾動值之紊流強度分佈,在區域-0.6≦Y/D≦0.6 處為大略凸起之位 置,為紊流強度值較大分佈之主要區域。因此,吸出動量的干擾量增 加,會使原來較強的不穩定尾流流場之紊流強度分佈,能得到相較於 原來穩定之流場控制。 頻譜分析 如圖3.3-1 至圖 3.3-8 下,利用 Hot-Film probe 於測試段中位置 X/D=3.5,Y/D=1.0 量測圓柱後尾流之主要頻率 fS ,隨著吸出干擾速 度Uj的增加,fS 和未干擾之尾流的剝離頻率其值都相近,但隨著吸 吸出干擾動量愈多,及Re 的增加,除了過多擾動對圓柱尾流所造成 混亂的雜訊外,其尾流之特徵頻率依然呈現明顯,這量測出的特徵頻 率,應就是當時受吸入動量後激擾圓柱後尾流的頻率。 平均速度 圖3.3-13 至圖 3.3-16 於不同 Re 下,受穩定動量吸出干擾之圓柱 尾流速度分佈,比較有動量吸出干擾的尾流(Uj /Uup ≠0)與無干擾的尾 流(Uj /Uup =0),可發現兩者尾流中間部分的速度比自由流的速度低, 但有動量吸出干擾的的情形在尾流區的速度反略高於原來未干擾的 尾流速度(以相同的位置作比較)。其原因可解為﹔此實驗數據在
X/D=3.5 獲得,由於吸出動量的干擾已破壞原來較規律的尾流結構, 流體因此朝頁X-方向的流動的成分較少,使流場在 X/D=3.5 已呈較 均勻的分佈。由於Hot-film 在流速趨近於零較不準確,而且此尾流區 可能橫向與流向的速度不可偏廢,Hot-film 感應到的是兩者的合成大 小,因此低速量測時Hot-film 有較大的誤差,此區的流場有待進一步 的探討。 經由上述分析描述,發現圓柱後尾流經穩定動量吸入激擾 下,會對其尾流區內紊流強度產生相當程度的抑制作用,尾流中 之渦漩於尾流區有消弱的現象,下游區(例如X/D=3.5)的平均流 速則較為均勻。 3.3.3 PIV 觀測結果 在不同的角度下針對流場吸出動量,角度分別為 0˚、30˚、60˚及 90˚。在藉由對流場的初步觀察後,發現尾流場在吸出動量後所產生 的變化效應與注入動量差異很大,因此以下便針對在不同的角度下對 尾流場吸出動量後之流場結構分別加以研究,並且探討流場在這種效 應下是否會變的較均勻、尾流結構是否會被破壞。 無角度動量干擾 首先圖3.3-17 是位於 0˚時對尾流場吸出動量後所產生的結果。在
此條件下,通過圓柱上下方的流體仍會出現交替式的向圓柱後方捲入 的情形,但在吸出的動量影響下,靠近圓柱後方的流場均向圓柱移 動,導致接近圓柱後方的流場呈現出混亂的情形並且較無明顯之渦漩 剝離出現。由圖3.3-18(a)~圖 3.3-19(a)中可以發現,在 X/D 約介於 2~3 的位置,圓柱後方流場因受動量干擾的緣故,而使得上游的流體直接 通 過 原 本 在 沒 有 動 量 干 擾 的 情 況 下 會 產 生 尾 流 的 區 域( 約 -1≤Y/D≤1),而沒有產生渦漩。但此流場為一暫態的現象,經由觀察 圖3.3-17 可以發現,此一由圓柱下方向上流動而產生的均勻流場存在 著一固定的頻率出現,當Re = 465,吸出動量為 Q = 0.5 L/min 時,其 週期大約為 8 秒。並且由圖 3.3-17 (d)可以看出因為圓柱上方的流體 向下流動,而使得尾流場變為非常混亂,並且產生未順著光頁運動的 情形。 有角度動量干擾 圖 3.3-20~21 顯示圓柱旋轉 30˚吸出動量後的流場情形。在圖中 可以清楚的看出圓柱後方的尾流區產生相當大的變化,圓柱後方的流 場因受到動量吸出的干擾,使得原本存在的剪力層遭到破壞。上游流 體在通過圓柱下方時,因為剪力層已被破壞而繞過靠近圓柱較混亂的 區域產生向上流動的情形。接著這一股流場將與通過圓柱上方的流場
相遇,因為兩流場之間速度梯度的存在而產生一剪力層。而這一剪力 層的產生將隨著流場的進行而形成高低起伏的型態。在圖 3.3-20 (a) 中剪力層的發生位置與無動量干擾時相差不多,而隨著動量吸出的增 加,在圖3.3-21(a)中,此一剪力層將被破壞,使得圓柱後方的流場變 得均勻,完全破壞了尾流結構。而在圖 3.3-20 (b)與圖 3.3-21(b)中可 以發現水平方向的速度在繞過動量干擾的區域後會產生加速的現 象,而隨著Y/D 的增加而逐漸降低,到了剪力層的位置將降到最低, 而後恢復到上游速度。而垂直方向的速度分量在繞過動量干擾區後開 始增加,增加到Y/D = 0 附近為最大值,而後通過剪力層並且逐漸降 低,最後回復到零,使圓柱上方的流場恢復成水平流動。因此圓柱後 方的流場在剪力層之下流場呈現向上流動的型態,而剪力層之上則是 呈現水平流動的趨勢。而在剪力層之下的這股向上流動的趨勢在越接 近圓柱的位置越強烈,隨著遠離圓柱而受到上游流動的力牽引而逐漸 減弱。 圖 3.3-23~24 為動量吸出角度為 60˚時的流場結構。由圖中可以 再次清楚的發現,圓柱後方的流場與原本在無動量干擾時的尾流結構 產生相當大的差異。流場結構與在 30˚時吸出動量時相當類似,在圓 柱後方除了靠近圓柱的區域會產生較混亂的情形,另外就是原本會出 現的上下兩剪力層已消失,取而代之的是一個上下起伏的剪力層。而
由圖3.3-22 中可以發現,當 Re = 465 而注入動量為 Q = 0.2 L/min 時, 此一剪力層上下擺動的週期約為3.3 秒。由圖 3.3-23 (a)中可以看到流 體在通過圓柱下方時,較靠進圓柱的部份流體受到動量干擾的作用產 生了較混亂、沒有在光頁上流動的非2D 運動,而較遠離圓柱的流體 則繞過此一區域向上方流動,並與通過圓柱上方的流體遭遇而形成高 低起伏的一剪力層。而圖 3.3-24(a)則是增加動量吸出後消除了速度梯 度,使圓柱後方流場形成均勻流動。而經由觀察圖 3.3-23 (b)與圖 3.3-24(b)可以看出,水平方向的流速會隨著 Y/D 的增加而降低,直到 經過剪力層之後逐漸增加恢復到上游速度,同時圓柱下方的水平速度 也高於上游速度。而垂直方向的速度則是隨著 Y/D 的增加而增加, 最大值發生在Y/D = 0 的位置,然後逐漸降低到零,使得圓柱上方的 流場在沒有受到剪力層影響的區域為一近似水平的運動。 圖 3.3-26~ 圖 3.3-27 為垂直向下 90˚吸出動量時的流場結構。由 圖中可以看到圓柱後方的流場結構已經無法出現類似上述在 30˚及 60˚時之均勻流場。當上游的流體流經圓柱下方受到動量干擾後,依 然會出現向上流動的趨勢,不過在這種條件下,此趨勢變的較不強 烈。而受速度梯度影響而產生的類似尾流結構所影響的區域因此增 加。在圖 3.3-26 (a)中可以發現,當吸出的動量較小時,由於圓柱下 方所產生的向上流動趨勢較微弱,因此與通過圓柱上方之流場形成一
類似尾流的結構,同時由圖 3.3-26 (b)中可以發現此結構保持在一固 定寬度大約是Y = 1.5D。當動量吸入的干擾量增加時,在圖 3.3-27 (a) 中可以發現,由圓柱下方向上流動的趨勢增加,導致與圓柱上方流場 所產生的剪力層位置向上提高,同時此一類似尾流的結構寬度也比動 量吸出量小時較窄。另外由圖3.3-25 中也可以發現此一尾流結構有週 期性上下擺動的情況發生,當Re = 465,吸出動量 Q = 0.5 L/min 時, 其週期大約為3.8 秒。因此由上述可以知道,動量吸出干擾量的大小 將直接的對圓柱後方的流場產生重大的影響。接著由圖3.3-26(b)中可 以觀察到在動量吸出干擾量較小時,在 X/D≈2 截面上的水平速度除 了在尾流區以外大致上維持穩定大小,但是在垂直方向的速度則是越 靠近尾流區越高,然後逐漸向兩側遞減。當吸出動量增加到 Q = 0.5L/min 時,如圖 3.3-27 (b),因為圓柱下方向上流動的趨勢增強, 因此出現與在30˚及 60˚時吸出動量的類似情況,就是尾流區下方的水 平速度將略高於上方的速度,同時水平方向的速度在尾流區上方將逐 漸增加恢復到上游速度。而垂直方向的速度則是隨著 Y/D 的升高而 增加,而在通過尾流區較混亂的流場後又恢復到零左右。 圖 3.3-28~30 顯示在 Re=465 時於圓柱後方 0˚、60˚與 90˚時穩定 吸出動量之頻譜圖。其出現的特徵頻率分別也與利用PIV 分析出之結 果相近。由圖3.3-29 及圖 3.3-30 中可看出在探針所在的位置上流場的
頻率非常單一,較無其他頻率出現。 大致上總結以上的觀察可以發現,於圓柱後方0˚穩定吸出動量時 將會擴大尾流影響的區域範圍,但是當動量吸出角度旋轉至30˚及 60˚ 時,因為動量的干擾角度靠近理論上的流體通過圓柱時的分離點,因 此破壞了原本將產生的剪力層,消弭了大部分的尾流結構,同時若吸 出的動量增加時,圓柱後方的流場將會變的更均勻。但是如果將動量 吸出角繼續增加到 90˚時,則上述之均勻的流場結構將被破壞,而類 似尾流的結構將再次出現,且若吸出動量太小時,尾流所影響的區域 將會增加。 3.4 往復式動量注入/吸出 3.4.1 流場可視化觀察 本實驗除了單獨注入/吸出動量於單圓柱後尾流流場,更進一步採 用往復振盪的噴流的方式,並以調整不同的頻率與振幅,期達到建設 性或破壞性的干涉,以改變圓柱後尾流場。 由圖3.4-1 至圖 3.4-4 在 fos=0.3HZ 往復動量圓柱後尾流流場觀 測,可看出往復動量注入激擾大致過程,都是由圓柱後下方先產生渦 漩,再慢慢被拉伸,因噴出動量注入碰擊此,使之脫離獨立渦流,可 看見此下方渦流被噴出之動量激擾衝而破壞,當動量噴出後,隨即圓
柱管表面狹縫吸入相同頻率且等量動量於圓柱管內,造成圓柱後上方 欲產生渦漩被此吸入動量往下拉扯運動,而後被吸入狹縫內,使得圓 柱後上方渦漩形狀比先前更為縮小,如此不斷往復動量注入下,激擾 於產生渦漩尾流區去破壞原本圓柱後尾流規律性頻率所產生之渦漩 剝離。由圖3.4-5 至圖 3.4-8 在 fos=0.5HZ 往復動量圓柱後尾流流場觀 測,可發現當不斷增加動量激擾頻率,圓柱後尾流區渦漩剝離頻率會 相對於動量激擾頻率增加而相對降低,此現象會與Hot-Film probe 所 量測到渦漩剝離頻率趨勢一致。再由上述往復動量圓柱尾流流場影像 圖中,觀察發現當增加動量激擾頻率後,圓柱後尾流區之渦漩寬度有 稍微變大之趨勢,說明隨動量激擾頻率增加,圓柱後尾流區之渦漩剝 離遭受到破壞所發生之時間減少,以致當渦漩還未遭受到較多破壞其 剝離尾流,下一個噴入或吸入的動作又接著而來,造成圓柱後尾流區 遭受到較少破壞,以致圖形中煙線所顯示,發現影像邊緣化之圖形, 是相對於較少之動量激擾頻率來的混亂。由上述之圖也可發現,當圓 柱後的尾流渦漩剝離隨Re 愈大,除了其尾流渦漩剝離也往愈下游產 生,而且其所遭受到破壞之圓柱後尾流區也往愈下游發生。 圖3.4-9 至圖 3.4-16 之相對應於流場的速度頻譜圖,由上述頻譜 得知,尾流場中的主要頻率為往復式干擾的頻率所主宰。從流場控制 觀點,我們可以藉由干擾的頻率,調整流場中的主要頻率。
3.4.2 紊流強度 由圖3.4-17 至圖 3.4-20 所示於不同 Re 下,往復動量注入圓柱尾 流流場於Y-方向之紊流強度分佈,可發現圖中(Uj/Uup =0)之速度擾 動值分佈都比圖中其他的U /j Uup值之速度擾動值來得高,顯然在未注 入圓柱後尾流流場之紊流強度是較大的,在固定噴吸動量下,隨著不 斷增加往復動量激擾頻率於圓柱後尾流流場,則紊流強度值是較為下 降的。因此,尾流流場之紊流強度可以此干擾得到抑制。由於增加往 復動量激擾頻率於圓柱尾流區,使得原來較高的不穩定之紊流強度分 佈,能得到相較於原來穩定的流場,並從圖中可了解往復動量注入圓 柱尾流流場於Y-方向速度擾動值之紊流強度分佈,在區域-1.0≦Y/D ≦1.0 處為大略凸起之位置,為往復動量激擾下紊流強度值較大分佈 之主要區域。 3.4.3 速度分佈 由圖3.4-21 至圖 3.4-24 於不同 Re 下往復動量注入圓柱尾流流場 於Y-方向的平均速度分佈,可發現有往復干擾之尾流在區域-0.6≦ Y/D≦0.6 處平均速度有上揚趨勢,其中 fos=0.5HZ 之速度分佈曲線高 於fos=0.3HZ,由結果懷疑可能是往復之噴吸注入運動,可會使尾流 區後類似有一種突然但連續的拉扯運動,以至速度分佈曲線和只有穩
定注入動量之速度分佈曲線有著不同,但都比圖中Uj/Uup =0未注入 之速度分佈來的高,可見得未注入時,圓柱後尾流是受到圓柱的阻 擋,在圓柱後的平均速度都是較小值的,相對於往復噴吸注入於圓柱 後尾流場,由於是有吸有噴的控制狀況,因此,對於往復動量注入圓 柱尾流流場於Y-方向速度分佈是有上凸的分佈曲線趨勢,此現象隨 著Uj=Uup 值的減小而逐漸減緩。
第四章 數值模擬
4.1 統御方程式 對一連續的牛頓流體而言,速度和壓力必須滿足連續方程式和動量方 程式,假設流體性質均為常數,在卡氏座標下,基本的流體統御方程 式如下: j j i i j i j i i i x x u x P x u u t u equation momentum x u equation continuity ∂ ∂ ∂ + ∂ ∂ − = ∂ ∂ + ∂ ∂ = ∂ ∂ 2 : 0 : µ ρ ρ 4.2 格點生成與獨立 4.2.1 軟體模擬 本研究主要在探討圓柱上狹縫噴出動量對圓柱尾流渦漩的影 響,其模型尺寸如圖4.1,圓柱表面設為不滑動邊界,圓柱後留約本 身直徑9 倍的空間,用以避免圓柱尾流受到邊界的影響而產生模擬上 的錯誤,且藉由控制進口速度來改變雷諾數的大小;在求解方面使用 的是upwind scheme,而由於所要模擬的是暫態的情形,在解此統御 方程式所用的數值方法為PISO 法,雖說所耗的電腦記憶體及時間會 較多,但是在求得的數值上較為精確。4.2.2 格點獨立測試 為了看出軟體模擬出的數值是否會因為格點的一致加密,使得分 析結果有所改變,我們將圓柱分別分割80 點(總格點數為 7200)、 100 點(總格點數為 11200)及 120 點(總格點數為 19200);由圖4.2 (a)定義流體方向與角度,圖 4.2(b)可知 Cp 值和角度的關係沒有 因為格點增加而有太大的變化;並與實驗值做比較,顯示數據上沒有 很大的誤差。經過格點獨立測試後,我們將圓柱分割為120 點,計算 區域的總格點數為19200,放大的圓柱模型如圖 4.3 所示。 4.3 與實驗值驗證 利用軟體模擬雷諾數為465 時流體流過圓柱,在圓柱後產生一週 期性的渦漩如圖4.4,而利用此週期算出 Strouhal Number 值為 0.173, 與實驗結果0.179 頗為接近,並將此模擬所得的值與理論值 0.2 做比 對,誤差為15﹪為可容許的範圍內,證明軟體測試的可行性。 4.4 圓柱升力與阻力 4.4.1零度角注入與吸出之影響 圖4.5(a)為動量注入/吸出在狹縫開口為0度時,圓柱上的阻力 係數值CD,如圖所示,當沒有流體注入時,CD值在平均值1.15附近有 週期性,起伏現象振幅為0.04,頻率相當於Strouhal No等於0.18,顯
示圓柱受尾流渦漩的影響,受力有週期性的變化。動量的注入會減小 圓柱上阻力的平均值和其週期性變動的幅度;且注入的量越大,圓柱 上的阻力越小。反之動量的吸出會增加阻力的平均值,同時也會使得 阻力變動的頻率和幅度增大,而這些影響會隨著較大的動量吸出值而 越明顯。 圖4.5(b)為前圖相對應的升力係數,沒有動量注入的情況下, 升力係數以振動約0.6做週期性的變化(St = 0.18),動量的注入可減 小升力變動的幅度,而動量的吸出則會提高CL值振盪的幅度,同時增 加振盪的週期。 4.4.2有角度注入與吸出之影響 圖4.6 在不同的角度下,動量注入/吸出的速度固定為 27.4 mm/s, 圓柱上的阻力係數值與升力係數值。由此結果可知;在0 度時的動量 注入對阻力的減小效果最好。動量注入在角度 30 度時對圓柱上阻力 仍有減小的效果,但其影響程度不如 0 度角時佳。動量注入在 60 度 時,阻力的變動頻率大致上較無動量注入時為高,而阻力平均值則沒 有太大變化。動量吸入在 30 度時會將阻力變動放大,然而動量吸入 在60 度時,卻能減小阻力。 4.4.3 週期性動量注入與吸出之影響 當有週期性的動量注入-吸出時,我們可以由圖4.7發現,在第二 次的動量注入會將原先圓柱後的兩渦漩逐漸消除,重新由小至大生成 一對渦漩。如圖4.8(a)所示,阻力係數有明顯週期性的變化,注入
-吸出的振幅越大(比較A=0.2m/s與0.1m/s的CD分佈)CD的起伏振幅 也越大,其尖峰值與Uj的尖峰值有相位落差(約4秒,180°),CD的週 期與Uj的週期相同。CL值方面如圖4.8(b)所示,有週期性動量注入 的圓柱,CL值基本上為零,這是由於週期性的動量注入破壞了原來的 渦流結構。 不同頻率的動量注入,其CD與CL值如圖4.9所示,一般而言,CD 值以相同 於動量注入的頻率,做上下的變化,在相同的注入振幅,(A=0.2m/s) 下,CD的上下振幅均相同,CL值也均為零。因此動量注入的頻率, 為主宰流場振盪的頻率。