802.11-based Positioning System for Context Aware Applications
Ming-Hui Jin1, Eric Hsiao-Kuang Wu2, Yun-Bin Liao3 and Hui-Chun Liao41Department of Computer Science and Information Engineering, National Taiwan University, Taipei, Taiwan jinmh@db.csie.ncu.edu.tw
2,3,4Department of Computer Science and Information Engineering, National Central University, Chungli, Taiwan 2hsiao@csie.ncu.edu.tw, 3u8093100@cc.ncu.edu.tw
, 4u8135000@cc.ncu.edu.tw
Abstract
This paper presents a novel 802.11-based positioning system called the Maximal Cluster Centered Positioning System (MCCPS) developed and demonstrated at National Central University. The MCCPS system locates mobile objects via collecting the sensed power strengths of the mobile objects to multiple wireless access points. To overcome the serious multipath fading problem in the indoor environment, several positions called reference points were selected and a database is introduced to maintenance the power signature of each reference point. The experimental results show that the location information provided by MCCPS assures high correctness of region classification and low distance error.
Keywords: positioning, 802.11, locating, power
1. Introduction
Positioning offering the locations of the subscribers has been a key component for mobile computing and pervasive computing technologies. Via position information, mobile terminals could enjoy useful geographical information nearby in a natural and flexible manner. Several commercial applications such as vehicle fleet management, intelligent transport systems, and location-based applications [1 – 3], have recently driven the research and standardization activities in the field of mobile terminal positioning [4].
The global positioning system (GPS) is a well known positioning approach. It requires mobile users to be equipped with GPS receivers for learning their positions. Although GPS provides convenient locating services for mobile applications, the GPS approach carries two main disadvantages. First of all, the size and cost of mobile transmitters would be considerably increased because of the incorporated GPS receiver. Moreover, a unblocked transmission path is required to receive usable GPS data of at least three satellites, which makes the system useless in buildings or roads surrounded by high buildings or mountains [5].
Developing a power-efficient accurate location service for indoor applications has been critical for context aware applications which constructs a smart space to interact with users. The difficulty of receiving usable GPS data in the indoor environment has driven the location sensing capabilities for the advanced wireless networks. In the literatures, several positioning techniques have been
proposed for mobile computing environment. They could be roughly classified into three categories. The first category applies the Time of Arrival (TOA) or Time Difference of Arrival (TDOA) schemes to locate mobile terminals [4, 6]. The principle of TOA and TDOA is estimating the distance between the receiver and each sender according to the traveling time from the senders to the receivers and then calculating the position of the receiver with the help of the known positions of three senders [4]. The second category applies the Angle of Arrival (AOA) scheme to locate mobile terminals. The principle of AOA is estimating the angle of arrival signal and then calculating the position of the sender by the known positions of the receivers and the angles of arrival signals detected by each receiver [6]. The last category utilizes the attenuation of signal power strength of the senders nearby to locate mobile terminals. The principle of most methods is applying the propagation law to estimate the distance from the receiver and each sender [5, 6].
Although TOA and TDOA are simple and concrete, the derived technologies are difficult in practice. The main difficulty arises from time synchronization among the senders and time-delay (or arrival time difference) detection in the receivers. Without perfect time synchronization or time-delay detection technologies, the positioning results would be inaccurate. To ensure perfect synchronization, these locating technologies often require the senders to be equipped with an extremely accurate synchronized timer. Besides, the distance between the senders should be significantly large enough to ensure the difference of the positioning signal arrival time distinguishable. The above constrains induce TOA and TDOA approaches not appropriate for indoor positioning. On the other hand, the AOA approach also requires the sender to be able to detect the direction of arrival signals. This also requires the access point to equip extra components such as the smart antennas [7]. Besides, the reflection problem due to the indoor natures such as walls and pillars often causes inaccurate positioning results.
Driven by the above regards, we consider the power strength approach of the third category. It requires no extra equipment for both the access points and mobile terminals; however, the serious multipath problem from the indoor natures makes the propagation laws invalid. To overcome the multipath problem, a positioning method called Maximal-Cluster Center Scheme (MCCS) is presented. MCCS only assumes that each position has its individual
power strength signature and each signature is invariant for a period of time. A database is adopted to maintain the power strength signatures of several positions in the service region. As a mobile terminal estimates the power strength signature of its position according to the power strength of the access points nearby, the mobile terminal will submit the power signature to the positioning system and then MCCS will generate a graph with several clusters based on the power strength signature and then return the center of the maximal cluster as the position of the mobile terminal.
This paper is organized as follows. In Section 2, the definitions, assumptions and principle regarding the MCCS are presented. In Section 3 we propose the MCCS. Experiments and comparisons are described in Section 4 and the conclusion is drawn in Section 5.
2. The Principle of MCCS
2.1 Power Sequence and Power Signature
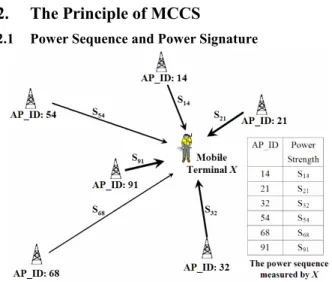
Fig. 1. The power sequence measured by mobile terminal X
Fig. 1 shows that, at a certain time, a mobile terminal X detects a sequence of signals from the six access points. The received power level from the access point with an access point ID, 91, is S91. For each position p and each access point b, S(b, p) denotes the signal strength of access point b measured at position p. Based on this notation, for each position p, we say that the sequence <(b1, S(b1, p)), …, (bn, S(bn, p))> is a power sequence of p if, for all c ∉ {b1, …, bn}, no mobile terminal could detect any signals from access point c. In other words, a power sequence of p records the detectable power values with associated access point ids. Similarly, in this paper, <(b1, SX(b1)), …, (bn, SX(bn))> denotes the power sequence detected by the mobile terminal X, where SX(bi) is the signal strength of access point bi.
Locating the position of a mobile terminal through comparing the power sequence of each position and the power sequence measured by the mobile terminal is simple but impractical. It contains two fatal shortcomings. First, for each access point b and position p, S(b, p) is not a constant. Fig. 2 shows the distribution of power strength of a certain access point measured at a certain fixed position. Moreover, the number of interested positions is infinite, and the system could not maintain the data containing infinite power sequences.
The central limit theorem provides an entry point for overcoming the first problem. Although the power strength of a certain access point at each position is a random variable, the mean of the power strength will converge to a certain value if the power strengths are the samples of the same random variable according to the central limit theorem. Although we have no complete knowledge about each random variable S(b, p), however, the sample mean of S(b, p) provide useful information for determining the location of mobile terminals. Therefore, we define the power signature of position p as follows.
Let {b1, …, bn} be the set of all access points which could be detected at position p and let µ(bi, p) denote the mean of the random variable S(bi, p). The power signature of access point bi at position p is a tuple (bi, µ(bi, p)) and the sequence < (b1, µ(b1, p)), …, (bn, µ(bn, p)) > is a power signature at position p.
Fig. 2. The distribution of power strength 2.2 The Principle of MCCS Positioning
The method for avoiding the infinite point problem is to maintain the power signatures of a finite set of positions. The position whose power signature is maintained by the proposed positioning system is called a reference point. The principle of MCCS positioning could be expressed by Fig. 3 and Fig. 4.
Fig. 3. The Positioning Supports of an access point
In Fig. 3, the system maintains several reference points. The dotted-line is the set of all positions at which the power strength of the access point is the same as what measured by
the mobile terminal. Two adjacent reference points are connected by a line called Positioning Support of the access point if the power strength of the access point measured by the mobile terminal is greater than that measured by one reference point and is less than that measured by another one. If the propagation law persists, then there exist at least two positioning supports in the rectangle formed by the nearest four reference points of the mobile terminal.
Fig. 4. The Positioning Support of three access points
Fig. 4 shows the Positioning Supports of three access points. Similarly, if the propagation law is held, then there exists at least 6 Positioning Supports in the rectangle formed by the nearest four reference points of the mobile terminal. Besides, Fig. 3 and Fig. 4 imply the phenomenon that the density of Positioning Support in the region nearby the mobile terminal is higher than that in other regions.
Although the propagation law can not be applied the indoor environment, however, our experimental results show that the density of Positioning Support in the region nearby each mobile terminal is still higher than that in other regions. Therefore, we assume that each mobile terminal has higher probability to stay in a region if the region contains more Positioning Supports. Therefore, we define a graph called the positioning support graph for presenting our proposed positioning system in Section 3.
Let B = {b1, …, bn} be the set of all access points which could be detected by the mobile terminal X. If the power signature measured by X is < (b1, µ1), …, (bn, µn) >, then the positioning support graph of B generated by X is the graph G(B, X) = <VB, EB, W(B, X)> which satisfies the following requirements.
z VB = The set of all reference points in the service area of the access points b1, …, bn.
z EB = {(u, v) | u, v are two adjacent reference points of VB}
z For each e = (u, v) ∈ EB, W(B, X)(e) = k if there exist exactly k access points bπ(1), … bπ(k) such that max(µ(bπ(i), u), µ(bπ(i), v)) ≥ µπ(i) ≥ min(µ(bπ(i), u), µ(bπ(i), v)) for all 1 ≤ i ≤ k.
3. The Maximal-Cluster Centered Positioning
System
3.1 System Architecture
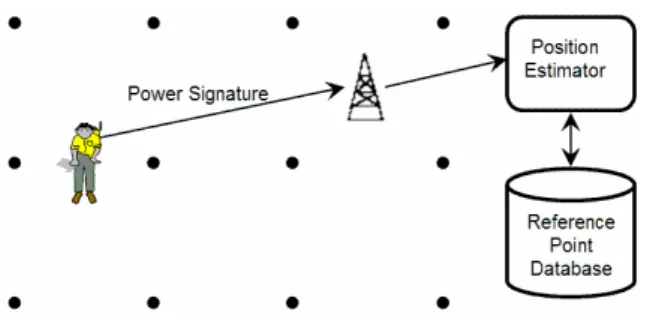
Fig. 5 shows the system architecture of the Maximal-Cluster Centered Positioning System (MCCPS). In
Fig. 5, the power signature of each reference point is maintained by a database called the reference point database (RPDB). As a mobile terminal desires to learn its position, it estimates the power signature of its current position and then forwards the information to its access point. Whenever an access point receives the power signature estimation, it sends the information to the position estimator. The position estimator then queries the RPDB to retrieve the graph <VB, EB> and then calculate the function W(B, X). According to the positioning support graph G(B, X), the position estimator returns a estimated position to the mobile terminal. The set B could be retrieved from the power signature estimated by the mobile terminal.
Fig. 5. The system architecture of the MCCPS
3.2 The Positioning Procedure for the Position Estimator
For convenience, for each positioning support graph G(B, X), we define a cluster C to be a subgraph <VC, EC> of G(B, X) satisfying the following requirements.
z For each e ∈ EC, G(B, X)(e) ≥ 1
z There exist no e = (u, v) ∈ EC such that W(B, X)(e) ≥ 1, u ∈ VC and v ∉ VC.
Namely, a cluster is a maximal subgraph in which the weight of each edge is greater than 0. Since the weight is the number of positioning supports, therefore, according to the discussion in Section 2.2, the mobile terminal X should stay in the cluster with greatest weights. Based on this concept, we propose the positioning procedure for the position estimator as follows. The input data is the power signature < (b1, µ1), …, (bn, µn) > estimated by the mobile terminal X. Step 1: Retrieve B = {b1, …, bn} from the power signature
< (b1, µ1), …, (bn, µn) >
Step 2: Query the set VB and EB from the RPDB. Step 3: For each e ∈ EB, calculate the weight W(B, X)(e). Step 4: Generates all the clusters of G(B, X).
Step 5: For each cluster C = <VC, EC> of G(B, X), calculate WC = ( )
( )
, C B X e E W e ∈∑
Step 6: Let MC = { C is a cluster of G(B, X)| for each D a cluster of G(B, X), WC ≥ WD }
Step 7: If MC contains exactly one cluster, let MDC = MC and then go to step 9. Otherwise, go to step 8. Step 8: Let MDC = {C ∈ MC | for each D ∈ MC, ||VC|| ≤
||VD||}, where || VC || is the number of elements in the set VC.
Step 9: Randomly selects an element C from the set MDC and then calculates PX, the mass center of C.
Step 10: Returns PX and terminates this procedure.
4. Accuracy Evaluation
For most indoor location-based applications, the correctness of region classification is the most concern and the error distance is another key issue. Consider the scenario that the room E1-107 is adjacent to the room E1-109 and a certain mobile terminal is placed in the rear of the room E1-107. In this scenario, most location-based applications would desire to locate the correct room of the mobile terminal, rather than the position in the front of the room E1-109 with error distance less than 1 meter. Therefore, the accuracy evaluation for indoor positioning has two dimensions: the correctness of region classification and the mean and standard deviation of the error distances.
Fig. 6. The layout of the first and second floor of Department
of CSIE, National Central University
4.1 Experimental Design
The experiments were carried in the first and second floor of Dept of CSIE, National Central University. Fig. 6 shows the layout of the experimental environment. In the experiments, the client is implemented on an Intel-processor laptop with a Cisco Aironet 350 PCMCIA card. The OS of the laptop is Linux Red Hat 8.0.
Table 1. The experimental results of APID approach
The first attempt of this study for indoor positioning is
the APID (Access Point Identification) approach. The APID approach first records the ID of detectable access points for each region. Whenever a mobile terminal wishes to learn its location, the APID approach requires the mobile terminal to submit the ID of all detectable access points. The APID approach compares the submitted data and the AP lists of each region and then returns the region of best match. The experimental results are summarized in Table 1. The experimental results in Table 1 show that the APID approach could not well distinguish the indoor regions. In the 15 experiments held in E1-109, the APID approach classifies the position of the mobile terminal in the E1-109 only 3 times and classifies the position of the mobile terminal in the first floor corridor outside the E1-109 12 times. Therefore, in this paper, the experiments for evaluating the positioning accuracy of the MCCS are held on the room E1-109 and the corridor outside E1-109.
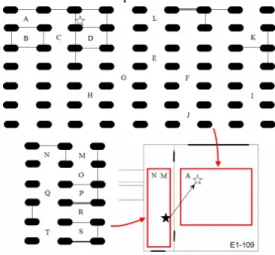
Fig. 7. The layout of the reference points
Fig. 7 shows the reference points in room E1-109 and the corridor outside the E1-109. Each oval in black is a reference point. For each reference point, the corresponding power signature contains the mean of at least 100 power strengths of each access point measured at the position. Whenever the power signature and the position of each reference point are stored in the RPDB, a mobile terminal randomly stands at a position and starts to estimate the power signature at the position. The testing positions are marked from A to T in Fig. 7. The power signature estimation at each testing position is calculated from 100 samples, each one of which contains the power strengths of the detectable access points. It should be noted that there are at most two detectable access points in certain testing positions.
4.2 Experimental Result
In the experiments, the MCCPS classifies all the testing positions into their regions correctly except the testing position “R”. The correctness of region classification is 95%.
Fig. 8 shows the experimental result regarding the testing position R. The star in black is the correct position and the star in white is the position calculated by the MCCPS system. The error distance in this experiment is about 3 meters.
Fig. 8. The experimental result at position “R”
The major factor which makes this misclassification arises from the multi-path fading, especially when the power strengths are weak. Table 2 shows the power signature estimated in the position R. The power strength of the second access point is the weakest. 6 of the 10 positioning supports in the maximal cell are generated by the second access point. When we remove the positioning support generated by this access point, the new result which is calculated by the MCCPS is in the corridor near the testing position S. Besides, we found that increasing the density of reference points in the regions near by the testing position R and D could also correct the calculated position. This shows that the layout of reference points decides the accuracy of the MCCPS system.
Table 2. The power signature estimated at position R
Table 3. Experimental Results
Beside the correctness of region classification, the error distance is another important measure for evaluating the accuracy of the MCCPS. Table 3 demonstrates the error distance of each experiment. The distance unit is 1 meter. The mean error distance is 1.4855 meters.
5. Conclusions and Future Works
The paper presented a 802.11 based positioning system, the Maximal Cluster Centered Positioning System (MCCPS). MCCPS positions each mobile object according to only the power signature estimated by the mobile object. The cost of this approach is low without major modifications to the communication devices of both mobile terminals and service providers. The experimental results show that the location information of MCCPS guarantees high correctness of region classification and low distance error.
The reduction of the number of reference points could reduce the RPDB maintenance cost significantly. This, however, may reduce the accuracy of positioning results. On the other hand, although increasing the density of reference points may increase the accuracy of the positioning results, both the RPDB searching time and maintenance cost increase. Therefore, finding the optimal layout of the reference points forms a great challenge in our future study.
In addition to the layout of reference points, the proper deployments of the access points also determine the accuracy of MCCPS. Increasing the number of detectable access points and their power strength measured at each position will increase the accuracy of MCCPS significantly. To avoid the interference, the number of access points is limited. Therefore, searching the solution for increasing the communication quality and positioning accuracy through finding the optimal layout of access point is inevitable.
Acknowledgement
This research was supported by Ministry of Education, ROC, with contract No: 91 A-H-FA07-1-4 (Learning Technology) and the Communications Software Technology project of Institute for Information Industry and sponsored by MOEA ,R.O.C
References
1. W. Collier and R. Weiland, “Smart cars, smart highways”, IEEE Spectrum, Vol. 31, pp. 27–33, Apr. 1994.
2. R. Jurgen, “Smart cars and highways go global”, IEEE Spectrum, Vol. 28, pp. 26–36, May 1991.
3. M. H. Jin, H. K. Wu, and J. T. Horng, "An Intelligent Handoff Scheme Based On Location Prediction Technologies", IEEE European Wireless 2002. pp. 551 – 557, Feb. 2002
4. M. A. Spirito, “On the Accuracy of Cellular Mobile Station Location Estimation”, IEEE Transactions on Vehicular Technology, Vol. 50, No. 3, May 2001.
5. M. Hellebrandt, R. Mathar and M. Scheibenbogen, “Estimating Position and Velocity of Mobiles in a Cellular Radio Networks”, IEEE Transactions on Vehicular Technology, Vol. 46, No. 1, Feb. 1997.
6. T. S. Rappaport, J. H. Reed, and D. Woerner, “Position location using wireless communications on highways of the future”, IEEE Communication Magazine, Vol. 34, pp. 33–41, Oct. 1996.
7. M. Mondin, F. Dovis, and P. Mulassano, “On the use of HALE platforms as GSM base stations”, IEEE Personal Communication Magazine, Vol. 8, Issue. 2, pp. 37 – 44, 2002