行政院國家科學委員會專題研究計畫 成果報告
壓電圓環的機電分析及其在多自由度球體轉動之應用研究
研究成果報告(精簡版)
計 畫 類 別 : 個別型 計 畫 編 號 : NSC 97-2221-E-151-030- 執 行 期 間 : 97 年 08 月 01 日至 98 年 07 月 31 日 執 行 單 位 : 國立高雄應用科技大學機械工程系 計 畫 主 持 人 : 何信宗 計畫參與人員: 碩士班研究生-兼任助理人員:林裕庭 碩士班研究生-兼任助理人員:張家祥 碩士班研究生-兼任助理人員:黃伯南 碩士班研究生-兼任助理人員:李俊輝 博士班研究生-兼任助理人員:張博舜 處 理 方 式 : 本計畫可公開查詢中 華 民 國 98 年 09 月 29 日
行政院國家科學委員會補助專題研究計畫成果報告
壓電圓環的機電分析
及其在多自由度球體轉動之應用研究
計畫類別:■個別型計畫 □整合型計畫
計畫編號:
NSC 97-2221-E-151-030-
執行期間:
97 年 08 月 01 日 至 98 年 07 月 31 日
計畫主持人:何信宗
共同主持人:
計畫參與人員:林裕庭、張家祥、黃伯南、李俊輝、張博舜
執行單位:高雄應用科技大學機械系
中
華
民
國
9 8
年
0 9
月
2 0
日
1
行政院國家科學委員會專題研究計畫成果報告
壓電圓環的機電分析及其在多自由度球體轉動之應用研究
Electromechanical Analysis of Piezoelectric Rings and Their
Applications for Rotating a Sphere
with Multi-Degree of Freedom
計 畫 編 號:NSC 97-2221-E-151-030 執 行 期 限:97 年 08 月 01 日至 98 年 07 月 31 日 主 持 人:何信宗 高雄應用科技大學機械系 計畫參與人員:林裕庭、張家祥、黃伯南、李俊輝、張博舜 高雄應用科技 大學機械系
一、中文摘要
本計畫的目標在於開發一個具備多自由 度球體轉動能力的新型壓電致動器,為了達到 這個目標,必須先對壓電圓環結構進行相關的 振動分析,這主要是因為此新型壓電致動器的 理論基礎都奠基在壓電圓環結構的不同振動 模態上面的緣故。在本計畫中所要探討的致動 器也可以稱為多自由度超音波馬達,一般而言 一個單自由度超音波馬達至少需要兩個振動 模態,以用來在定子與轉子的接觸面上產生橢 圓形位移運動。相對於單自由度超音波馬達來 說,一個多自由度超音波馬達必須具備有多個 相對應的功能。這個馬達將只由一個球體與幾 個極為簡單的壓電定子結構所組成。這個多自 由度超音波馬達將需要有三個振動模態來產 生三個橢圓形運動軌跡,再透過摩擦力將定子 上的橢圓形運動轉換為球體轉動運動。 在本研究中,經過壓電圓環的分析與設計 後,製作了球體轉動致動器的實體,在經過阻 抗量測、位移響應與振動模態的量測後,並進 行了球體轉動的運動試驗後,初步確定其相關 功能。 關鍵詞:壓電圓環、機電特性、超音波馬達Abstract
The aim of this project is to develop a novel piezoelectric actuator, which is capable of rotating a sphere with multi-degree-of-freedom (multi-DOF). To achieve this aim, vibration analysis of piezoelectric rings is contacted in advance because the theoretical fundamental underlying the piezoelectric actuator is the analytical theory of different vibration modes of piezoelectric rings. The actuator studied in this project can also be called as a multi-DOF ultrasonic motor. In general, a single-DOF ultrasonic motor needs at least two vibration modes to form an elliptical displacement motion on the surface in contact with a rotor. All multi-DOF ultrasonic motors have advanced functionality compared with single-DOF ultrasonic motors. In the case of a multi-DOF ultrasonic motor, the elliptical trajectories are composed of three orthogonal vibration modes. Then, the rotor rotates around the axis by frictional force due to its contact with the stator.
In this study, the prototype actuator for rotating a sphere is manufactured after the
analysis and design of the piezoelectric ring. Then, the impedance and displacement response are measured and the vibration modes are also obtained. As the result, a sphere can be rotated by the actuator for verifying the theoretical analysis.
Keywords:Piezoelectric ring, Electromechanical Characteristics, Ultrasonic motor.
二、緣由與目的
在多自由度球體轉動的運動目標下,需要 開發一個能夠產生多方向變形運動的致動 器,而且以直角座標(x, y, z)來看,這個致動器 必需能夠在 x, y, z 三個軸方向上以變形運動 透過磨擦現象達到球體的轉動運動狀態。針對 這些要求,可以想見的是傳統的壓電致動器無 法同時達到這些功能,為了滿足球體轉動的控 制需求,一個全新的壓電致動器必需從壓電圓 環的基本振動分析中重新被創造出來。 具體而言,本研究[1]的目標在於創作一 個能夠進行多自由度球體轉動控制的壓電致 動器,所根據的研究方法將以振動分析的數學 解析方式逐步分析檢討壓電圓環的各種模態 特性。三、壓電圓環的機電分析
以單純的金屬圓環而言,其可能發生的振 動模態有單純的徑向模態(r 向)、軸向模態(z 向)、切向模態(θ 向)、彎曲模態與剪切模態, 進一步的話還有r-θ 方向的剪切模態、r-z 方向 的剪切模態、θ-z 方向的剪切模態等等。其他 還存在有更複雜的振動模態,不過就應用而 言,為了避免複雜性帶來的困擾,一般都會盡 量採用簡單而容易掌握的振動模態。 此外,由於在本研究中所要探討的壓電結 構是以達到球體轉動運動為目的,因此在考慮 簡化驅動的振動模態之外,也必需考慮到該振 動模態在每伏特電壓驅動下所能產生的最大 變形量。經過分析比較之後,我們認為彎曲模 態最適合於做為球體轉動的應用。主要原因在 於容易找到三個互相正交的振動模態,還有容 易產生較大變形量的特點。 為了簡化問題起見,我們先以單純圓盤的 彎曲模態分析著手,將圓盤結構中所可能發生 的對稱彎曲模態做一個整理,圖2 所示即為圓 盤的各個對稱型彎曲振動模態。由於圓盤結構 為二維結構,可以r 與 θ 座標來表示圓盤上各 點的位置,其第nm 個振動模態則以 Bnm來表 示,其中n 代表 r 方向的節點數,m 則代表 θ 方向的節點數,為方便起見也可以n 個節圓與 m 個節徑來稱呼。而這裡所指的節圓與節徑則 是當振動模態變形時,振動量最低或為零的地 方。對照圖1 中所示圓環的彎曲振動模態平面 圖 , 圖 2 則 是 我 們 以 有 限 元 素 分 析 軟 體 ANSYS 所模擬分析得到的彎曲振動模態立體 圖,圖中可以看出各模態在不同的節徑和節圓 的狀況下之變形狀況。 B00 B01 B02 B10 B11 B12 B20 B21 B22 圖1、壓電圓環的彎曲振動模態 各模態之共振頻率會依外形尺寸而有所 改變,在外徑40mm,內徑 7.5mm 與厚度 2mm 的 尺 寸 下 , 振 動 模 態 B10 之 共 振 頻 率 在 12112Hz,而 B11之共振頻率在 22758Hz,在 圖2 中共有九個對稱的彎曲振動模態,考量到 球體轉動致動器所要驅動產生的每一個橢圓 形運動軌跡都需要以兩個互向呈現垂直變形3 運動的振動模態來完成。在這九個彎曲振動模 態中,我們選擇了 B10和B11兩個振動模態來 做為本研究之驅動模態。B10之變形為縱向模 態;B11之變形為左右彎曲模態,B11之左右彎 曲模態在轉子與定子接觸點並無高低差,所以 必需加上B10之變形來產生高低差,如此轉動 致動器才能藉由高低差來控制轉向,再利用電 極面的設計和電壓訊號的控制來達到多自由 度球體轉動控制的目的。 (a)B00 (0Hz) (c)B01 (7560Hz) (e)B02 (7559Hz) (b)B10 (12112Hz) (d)B11 (22758Hz) (f)B12 (38527Hz) (g)B20 (50450Hz) (h)B21 (61576Hz) (i)B22 (86902Hz) 圖2、圓環型彎曲振動模態的立體圖
三、多自由度球體轉動的應用
一般而言,一個多自由度球體轉動致動器 至少需要三個互相垂直的振動模態來產生三 個橢圓形運動軌跡,讓球體與致動器接觸時可 以透過摩擦力將致動器結構上的橢圓形運動 轉換為球體轉動運動。因此,如何設計一個致 動器的壓電結構以達到至少可以同時驅動兩 個互相垂直的振動模態,達成一個橢圓形運動 軌跡則是球體轉動致動器在做結構設計時的 重點。此外,球體轉動致動器除了要透過互相 垂直的振動模態來產生三個橢圓形運動軌跡 以達到三個軸向的旋轉運動之外,還必需要能 夠控制球體在這三個轉動運動中的正反轉方 向。 圖3、多自由度球體轉動致動器的組成結構 圖4、多自由度球體轉動致動器的驅動模態 在本研究中,主要是利用前節所談到的 B10、B11兩個振動模態的驅動來達到多自由度 球體轉動致動器的功能。圖 3 所示是我們將 B10與 B11兩個振動模態組合後進一步設計的 結構圖,由於這兩個模態的節圓都在同一個位 置,因此我們在節圓處的底部設置一個圓環做 為固定支撐,讓球體轉動致動器在這個固定支 撐的狀態下進行模態變形運動。圖中 4(a)為 B10模態,主要進行 z 向的上下變形振動。圖 4(b)與 4(c)為 B11模態以不同電極驅動下所構 成互為正交的模態,主要進行r 與 θ 向的水平 變形振動。由圖可知,任兩模態的結合都可以 形成單一軸向的旋轉,而三個正交模態的驅動 組合則可以達到三個軸向的旋轉,而且這三個 旋轉運動的軸心互相垂直。例如,若欲使球體 繞 r 軸旋轉時,須要驅動4(a)與 4(b)模態,而 欲使球體繞θ 軸旋轉時,則須驅動 4(a)與 4(c) 的模態,要使球體繞 z 軸旋轉,須驅動 4(b)與4(c)的模態。另外,對於兩個不同頻率的振 動模態要讓其在同一個頻率下驅動時,對電極 面的設計是很重要的。此時,電極面的設計要 設計成可同時驅動兩模態的型式,再利用模態 位移之相位差來驅動,如此就能在 r、θ 軸出 現橢圓型軌跡。我們對此球體轉動致動器的電 極面設計如圖 5 所示,圖中將電極面分割為 1-5 等五塊面積,其中 1、2、3、4 電極面是 用來驅動振動模態B11,電極面5 則是用來驅 動振動模態B10。表1 所示是我們所使用於控 制球體轉動方向的相位表,由於想要使球體轉 動時能夠朝單一方向旋轉的話,必須要在致動 器與球體的接觸點上以不同相位的正弦波驅 動 B10與B11模態,利用相位差的關係可以使 模態的變形產生單方向的摩擦推動效果,亦即 控制橢圓形變形軌跡的旋轉方向,若B10領先 B11模態90 度相位角時為順時針旋轉的話,則 當B10落後B11模態90 度相位角時會呈逆時針 旋轉。以表 1 中繞 r 軸(CW)為例,欲讓球體 繞順時鐘轉時須要用到B10 (a)模態,驅動電極 面為 5,電壓訊號是 Sin 90°,並且用 B11(b) 模態,驅動電極面為 2、4,電壓訊號分別是
Cos 0°、Cos 180°,當 B10(a)之 5 與 B11(b)之 2
模態達到變形量最高點時,B11(b)之 4 模態達 到變形量最低點,而且B10 (a)之 5、B11(b)之 2 的模態變形最高點高於B11(b)之 4 模態變形最 高點而產生高低差,如此就能控制球體之轉 向,表1 中的其餘部份均可以此類推。 圖5、電極面示意圖 表1 相位表 B10 (a) 5 2 4 1 3
繞r軸(CW) Sin 90° Cos 0° Cos 180°
繞θ軸(CW) Sin 90° Cos 0° Cos 180° 繞z軸(CW) No Signal Cos 0° Cos 180° Sin 90° Sin 270° 繞r軸(CCW) Sin 90° Cos 180° Cos 0°
繞θ軸(CCW) Sin 90° Cos 180° Cos 0° 繞z軸(CCW) No Signal Sin 90° Sin 270° Cos 0° Cos 180°
No Signal No Signal No Signal B11 (b) B11 (c) No Signal
四、實驗與討論
4.1 致動器的製作 在壓電致動器的製作過程中,黏著劑扮演 著很重要的角色,所製作出的產品性能的好壞 常常與黏著劑的妥善使用與否息息相關。一般 而言,我們在壓電致動器的製作過程中,都希 望保持其高剛性與低阻尼比的特性,而如何選 用黏著劑和如何進行黏合工作才能提高剛性 而降低阻尼比,使其不影響到原來的阻抗特性 則是接下來所要討論的。一般,表示黏著劑特 性的性質有硬度和抗剪強度,這裡所指的硬度 一般是以蕭氏硬度來做為標準,分為 A 與 D 兩類。蕭氏硬度數值小於80 者為 A,大於 80 者則為D。一般而言,市面上所售黏著劑的硬 度都在 D 級,其主要差別在於抗剪強度的高 低,在製作壓電致動器時我們希望的黏著劑是 具有高抗剪強度的。另外,以硬化方式來分類 的話,黏著劑可分為高溫烘烤硬化和常溫硬化 兩類。以黏合硬度來講,高溫烘烤硬化會優於 常溫硬化。以黏合方便來講,高溫烘烤硬化者 為單劑型,常溫硬化者為雙劑型。在施工時, 高溫烘烤之接著劑無混合問題,而常溫硬化有 雙劑混合問題,雙劑的比例如果混合不均勻可 能會影響到整體的黏合結果。還有,在黏合時 待黏合金屬之表面粗糙度常常也是影響黏合 後阻尼比大小的因素之一。5
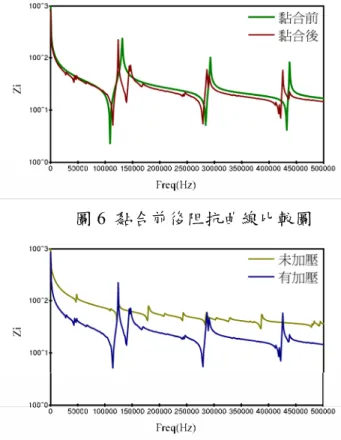
圖6 黏合前後阻抗曲線比較圖
圖7 有無加壓之阻抗曲線比較圖
表3 黏合前後的 Q 值
1st Mode 2nd Mode 3rd Mode
黏合前 343 894 1363 黏合後 219 537 812 Q 值 差異 36% 40% 40% 黏合前 1.46×10-3 5.59×10-4 3.67×10-4 黏合後 2.28×10-3 9.31×10-4 6.16×10-4 阻 尼 比 差異 56% 67% 68% 以下是探討黏合時的加壓與否,和其所造 成的黏合實驗結果的討論。這個實驗的目的是 為了降低壓電材料黏合於金屬時所造成的阻 尼比升高情形,避免影響到原本的阻抗特性。 將壓電圓盤黏合於鋁板上時,烘烤溫度為 150℃,烘烤時間為 20 分鐘,黏著劑採用 Emerson&Cuming 公司的 Eccbond G909 產 品,黏合前後以阻抗分析儀HP4194A 所量得 的阻抗曲線如圖6 所示,為了容易理解起見, 我們進一步據依阻抗曲線在共振頻率附近的 實驗值推算得到的 Q 值和阻尼比值表示於表 3 中。如表中所示,黏合前後 Q 值的差異約在 40%左右,黏合前後阻尼比的差異約在 60% 左右,顯示現行的黏合實驗尚有改善的空間。 我們在多次進行黏合實驗後,歸納出時常導致 黏合實驗失敗的原因有下列幾點:第一、接著 劑塗抹的厚度太厚且不均勻,會造成阻尼比升 高使阻抗曲線的共振現象趨緩,對致動器整體 的性能影響很大,所以必須將其影響因素降到 最低。第二,欲黏合金屬的表面粗糙度不佳, 當欲黏合金屬的表面粗糙不平滑時,其與壓電 材料之間無法緊密結合,會因此提高阻尼比。 第三,黏合時加壓與否,圖7 所示為黏合時有 加壓和無加壓所造成之阻抗曲線比較圖,可以 從圖中明顯看出有加壓較無加壓之阻尼比為 小。以上是在黏合壓電材料和金屬時所要注意 的事項,將阻尼比降到最小將可使壓電致動器 的性能大為提高。 5000 8000 11000 14000 10000 12500 15000 17500 20000 22500 25000 Hz Zi 13300Hz 21700Hz 圖8、致動器中壓電片電極之阻抗曲線 4.2 機電特性量測 在進行球體驅動運動之前,我們先對所製 作與組裝完成的致動器進行相關的機電特性 量測。圖8 所示是針對球體轉動致動器中的壓 電片電極,以 HP4194A 阻抗分析儀量測其阻 抗值隨驅動頻率的變化情形,由圖中曲線可以 明顯看到在 10kHz-25kHz 頻率範圍之間,有 13.3kHz 和 21.7kHz 兩個較為明顯的共振頻 率。圖9 所示是以半個電極面對致動器進行驅 動下所得到的頻率響應曲線,而且在 20kHz 到 25kHz 之間存在有兩個明顯共振峰值,而 且這兩個共振值會隨著量測點的位置改變而 變化。
0.00 0.02 0.04 0.06 0.08 0.10 0.12 0.14 0.16 0.18 10000 15000 20000 25000 30000 Hz um/V 圖9、致動器上圓孔內緣的位移響應 為了進一步了圓環形致動器的變形運動 情形,我們對圓環平面上的位移分佈情形進行 量測,最後整理出圓環形致動器的振動位移量 分佈圖,圖10 所示是在 22.6kHz 驅動下所量 測得到的壓電圓環B10 振動模態,圖 11 所示 是在 22.6kHz 驅動下所量測得到的壓電圓環 B11 振動模態,這兩個模態的表現與理論分析 的形狀相同,較不如預期的是其驅動的位移量 仍嫌不足。在我們最後的實驗裡,將一個鋼珠 置於球體轉動致動器上進行轉動測試,我們發 現需要達到幾百伏特正弦波電壓的驅動下,球 體才能夠轉動起來。而且,為了驅動球體轉動 必需要有 1um 附近的位移量才夠,在本研究 中雖可單純推動球體產生轉動,但對球體進行 任意方向的轉動控制確仍未能達到穩定控制 的狀態,這是日後仍需努力達成的方向。圖 12 所示是在本研究中所製作的球體轉動致動 器,置於夾持座上進行球體轉動試驗的情形。 利用電壓與相位的調整後雖可達到多方向的 轉動控制,但仍不穩定。 圖 10、在 22.6kHz 驅動下所量測得到的壓電 圓環B10 振動模態 圖 11、在 22.6kHz 驅動下所量測得到的壓電 圓環B11 振動模態 圖12、球體轉動實驗的情形
五、結論
在本研究中,首先探討了壓電圓環結構的7 振動模態特性,在考量到球體轉動運動應用的 前提下,選擇了壓電圓環的彎曲模態做為驅動 模態。接著,在研究中以壓電圓環的三個互相 正交模態為依據,設計製作出球體轉動致動器 結構。經過阻抗曲線、振動模態與位移響應曲 線的理論分析與實驗量測後,確定了此新型致 動器的機電性能,最後以球體轉動實驗初步確 定致動器的球體轉動功能,不過由於壓電圓環 在正弦波電壓驅動下所產生的位移變形量仍 然不足的緣故,球體轉動仍未能達到理想的穩 定狀況,這是日後仍需努力的地方。