CROSS-REFERENCE MAXIMUM LIKELIHOOD
ESTIMATE RECONSTRUCTION FOR POSITRON
EMISSION TOMOGRAPHY
CHUNG-MING CHEN, HENRY HORNG-SHING Lu*, AND YUN-Pal Hsu*
Institute of Biomedical Engineering , National Taiwan University , Taipei,
*Institute of Statistics , National Chiao Tung University , Hsinchu , Taiwan , R.O.C.
Ma i i > ate (MLE) is a wia
fir, k hss been X&' wn t rWcOrtstrrxcting e
rs n &resrtlt Ia iu^ia`e anti cis.
md te,. i# e , opos, a ruw and rJj cM',U _met
€e str4eture 114 on. 3v, ;FI m, "skies, fl near Xe ing rived' arti 9 to theay o be correct, a the in
m is Culled c ' cross->Iie `^ liketiha
;r t
rp ry J
mpro `r^a^a t dr j`e
Carle studies,
ut_al
, c.cer-i s ttse
P
Wry or a ro, a t y
i> i t +^or
However, since the filtered -backprojection algorithms
were originally designed for X-ray Cr, many
assump-tions made for these algorithms do not hold for PET
image reconstruction . As a result , the reconstructed
images, especially those with small features , may not
be accurate enough for clinical use [1].
To overcome the potential problems inherent in
the filtered -backprojection algorithm, various ap-proaches based on maximum likelihood with EM al-gorithms have been proposed for PET image recon-struction , e.g., Shepp and Vardi [2], Lange and Carson
[3], Vardi, Shepp and Kaufman [4], Politte and Snyder [5], Fessler et al. [6]. Theoretically, the physical proc-ess of a PET system may be modeled as a Poisson
ran-dom process that suggests the ranran-dom observations in
a PET as Poisson random variables . Moreover, the
mean of these random variables is indirectly related to
1. INTRODUCTION
Positron Emission Tomography (PET) is a
func-tional imaging modality providing biochemical,
physiological , and metabolic information in the human
body. Like X-ray CT, the distribution of
radioisotope-labeled chemicals may be estimated from the measured
gamma photon pairs through filtered -backprojection
algorithms as adopted by most commercial PET
sys-tems accredited to their computational
efficiency.
Received : July 7, 2001; accepted : July 30, 2001
Correspondence: Chung-Ming Chen, Institute of
Biomedical Engineering , National Taiwan University.
Taipei, Taiwan, R.O.C.
-32-ABSTRACT
Maximum likelihood estimate (MLE) is a widely used approach for PET image reconstruction.
However, it has been shown that reconstructing emission tomography based on MLE without regu-
larization would result in noise and edge artifacts. In the attempt to regularize the maximum likeli-
hood estimate, we propose a new and efficient method in this paper to incorporate the correlated but
possibly incomplete structure information which may be derived from expertise, PET systems or other
imaging modalities. A mean estimate smoothing the MLE locally within each region of interest is
derived according to the boundaries provided by the structure information. Since the boundaries
may not be correct, a penalized MLE using the mean estimate is sought. The resulting reconstruc-
tion is called a cross-reference maximum likelihood estimate (CRMLE). The CRMLE can be ob-
tained through a modified EM algorithm, which is computation and storage efficient. By borrowing
the strength from the correct portion of boundary information, the CRMLE is able to extract the use-
ful
information to improve reconstruction for different kinds
of
incomplete and incorrect boundaries
in Monte Carlo studies. The proposed CRMLE algorithm not only reduces the estimation errors,
but also preserves the correct boundaries. The penalty parameters can be selected through human
interactions or automatically data-driven methods, such as the generalized cross validation method.
Biomed Eng Appl Basis Comm, 2001 (August);
13:
190-198.
Key Words: Maximum likelihood estimate, generalized
EM
algorithm, regularization, generalized
cross-validation.
APPLICATIONS, BASIS & COMMUNICATIONS
the target image intensity by a linear transformation.
Under this model, there are at least two sources of
er-rors intrinsic in the reconstruction of PET images. One
is due to the random variation of Poisson random
vari-ables. This can be handled via the maximum likelihood
approach as attempted by [2-6]. A good review on
the MLE approaches may be found in the book by
Snyder and Miller [7].
The other source of error is caused by the ill-posedness in inverting the linear transformation. This can be managed by the regularization methods [8-10]. Snyder et al. [11] demonstrated that the MLE without regularization will show the noise and edge artifacts. Therefore, it is important to regularize MLE for a bet-ter reconstruction. A variety of regularization methods have been studied in literature, like the early stopping rule in Veklerov and Llacer [12], the method of sieves in Snyder and Miller [13], the Bayesian approaches with different kinds of priors in Hebert and Leahy [14], Green [15], Herman et al. [16], and so on. Ouyang et al. [17] proposed to use the correlated structure informa-tion as the prior informainforma-tion and obtain the Bayesian reconstruction of PET via the "weighted line site" method in their series of studies. While the correlated structure information contains more information about boundaries than the mathematical form of regulariza-tion does, the Bayesian reconstrucregulariza-tion needs more computational efforts than the MLE-EM approaches. Therefore, in this paper, we would like to investigate a new and efficient approach to integrate the correlated but incomplete structure information using the MLE-EM approach. The correlated boundary information is obtained from an expert, an informed audience or the same or other tomography systems such as transmis-sion PET, X-ray CT scan, and MRI. The intensities within the boundaries are not necessarily uniformly distributed. The proposed method, which is named as a cross-reference maximum likelihood estimate (CRMLE), has been shown to not only fully utilize the correlated structure information to obtain a better re-construction, but also retain the computational effi-ciency of the MLE-EM approach in contrast to the Bayesian approach.
This paper is organized as follows. The model of
PET, the ill-posedness, stability, and finite sample
be-haviors of MLE will be investigated in Section 2.
Because of these phenomena, we will also discuss
some versions of regularization based on the MLE in
Section 2. Via incorporating the information of local
smoothness, we can get better reconstruction images
after cross-referring the correlated information. This
new method, CRMLE, will be introduced in Section 3.
The implementation issues such as the influences and
selection rules of penalty parameters will be
investi-gated in Section 4. The implementation results and
discussions are also presented in this section.
Conclu-sions and future studies are provided in Section 5.
2. PEI' MODEL AND MLE BEHAVIOR
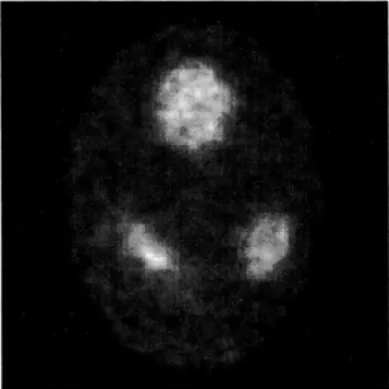
Consider the phantom illustrated Figure 1.
Sup-pose that there are three anatomic boundaries (ellipses)
that define three regions, each of which may be an
or-gan or a portion of a tissue. The emission intensity in
one region may be homogeneous within its boundary
as in the upper and right regions of Figure 1. That is,
the functional boundaries of emission intensities are
the same as the anatomic boundaries in the upper and
right regions. But, if some part of a region becomes
abnormal, the emission intensity will be
inhomogene-ous within the region as the left region of Figure 1.
The functional boundaries are thus different from the
anatomic boundaries. It is aimed to use the information
of anatomic boundaries to enhance the reconstructed
images without destroying the functional boundaries.
The model of the PET system employed in this studied follows that used in [2]. Let A denote the image to be reconstructed, which is decomposed into B square boxes (or pixels). The number of emission photon pairs generated in box b, n(b), is assumed to be Poisson distributed with a mean, A (b), for b = 1, 2, ..., B. Owing to the random variation of Poisson random variables, the actual number of emission, n(b), may be quite different from the mean, A (b). In par-ticular, for a large value of A (b), the variation is large since the variance of a Poisson random variable is equal to the mean.
When a positron radiates and annihilates with a nearby electron, two photons are generated and trav-eled in almost an opposite direction along a line. If two detectors within a preset time window receive these two photons, an ..annihilation event is identified in the tube formed by these two detectors. Let D denote the total number of tubes. For a PET system with Nd dis-tinct detectors, there can be at most (2d ) tubes.
Unlike the filtered-backprojection algorithms that
assume a space-invariant point spread function in
gen-eration of projection data, the "space-variant notion" is
incorporated in the PET model employed in this study
that may describe the physical process more closely.
Each box b is associated with a value, p(b, d), as the
probability for a pair of photons generated in the box b
and detected by the tube d, where b = 1, 2, ..., B and
d = 1, 2, ..., D.
One possible assignment for p(b, d)
would be the angle of view from box b to tube d.
Without loss of generality,
D
p(b,•) _ I p(b, d) is assumed to be 1.
d=1
According to the "thinning" property of Poisson
random variables [4,18], the total number of
coinci-dences detected by the d-th tube, n' (d) is an
inde-pendent Poisson random variable,
n (d) - Poisson (A.* (d)),
(1)
where '-' means 'distributed as,' and
* B
A (d) = I A(b)p(b, d)•
(2)
b=1
To see the performance of MLE in finite samples, Monte Carlo studies are simulated. Suppose the target phantom is as Figure 1. The number of boxes, B, is equal to Nb * Nb = 64*64 and the number of detectors is Nd = 64. The MLE can be reconstructed by the EM algorithm in Shepp and Vardi [2]. The log-likelihood of MLE-EM with respect to the iteration number is plotted in Figure 2. The log-likelihood is non-decreasing as the iteration number increases, which is assured by the property of EM algorithm. However, the log-likelihood of the true phantom is not the same as the converging value via the MLE-EM. At some iteration number, like 19 in this case study, the log-likelihood of MLE-EM would be closest to that of the true phantom. But as the iteration number increases further, the log-likelihood will be more and more away from that of the true phantom! To obtain the best reconstructed im-age before it deteriorates, Veklerov and Llacer [12] discussed the stopping rule based on statistical hy-pothesis testing. However, it is difficult to choose a proper stopping time in practice. Even if we select a good stopping time, such as 19 iterations in Figure 2, the reconstructed image in Figure 3 is still blurred without sharp boundaries and fine local structures. As the number of iterations increases, the reconstructed image becomes more and more blurring and spiky!
This is a commonplace phenomenon for MLE
approaches. Snyder et al. [11] showed that edge and
noise artifacts would be incurred due to the
ill-posedness of PET. A good alternative to reduce the
edge and noise artifacts is to use the regularization
methods. Several regularization methods have been
proposed previously. Silverman et al. [19] and Green
[20] added in a smoothness penalty in the
regulariza-tion method and modify the EM algorithm accordingly.
Snyder and Miller [13] used the method of sieves
to-gether with the EM algorithm. Green [15] also
consid-ered the modified EM algorithm for Bayesian
ap-proach with prior information about the patterns of
target images. In addition, the minimax estimator
based on tapered orthogonal series in Johnstone and
Silverman [21], the adaptive constrained methods of
regularization estimator in Lu and Wells [10] are also
proposed among many others.
To see the effects of regularization, a penalized MLE (PMLE) with a global penalty is demonstrated. Instead of maximizing the log-likelihood, one mini-mizes the negative value of log-likelihood and a 2-norm penalty. That is, this PMLE is
A
PMLE= arg
minx{-l(A) + allAII2 }, (3)
where 1( 2.) is the to -likelihood, a is a positive
pen-alty parameter and h All is the 2-norm of A. Ifa - 0 ,
then AC,u„., - A,,., On the other hand, if a - - , then
The penalty parameter, a, balances the
trade-off between the log-likelihood and the penalty term.
-EM
--- MLF.. 2 -- - --- - ----30 40 Snanm nuRlmr so 0Fig. 2 The log-likelihoods of the MLE -EM, the
con-verging MLE, and the true phantom with respect to
the iteration numbers are displayed.
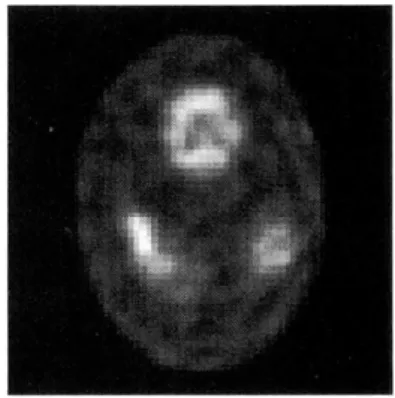
Fig. 3 The MLE-EM reconstruction is displayed
with 19 iterations.
-34-APPLICATIONS, BASIS & COMMUNICATIONS
The EM algorithm can be applied to find the
PMLE.
The updating formula becomes
-1 + 1 + 8an(b,.)
(4)
4awhere
b
X' b
P(b,d)n*(d)
(5)
n( ,.)_
(
)
g
, _,p(b,d)X (b )
Note that this is the unique nonnegative solution in the M step. The resulting estimates will be different for a different a. The log-likelihoods and 2-norm dif-ferences of MLE, PMLE and the true phantom can be plotted. If we choose a equal to the minimum value, 0.0001 in this case, then the PMLE has a less 2-norm difference with respect to the true phantom than that of the MLE. But the improvement is not too much as one can see that the PMLE in Figure 4 is about the same as the MLE in Figure 2. If the penalty a is chosen too large, then the PMLE will approach 0 and have even
Fig. 4 The PMLE-EM reconstruction is displayed
with penalty parameter 0.0001 and 19 iterations.
Fig. 5 The incomplete boundary information is
shown.
193
bigger 2-norm differences with respect to the true
phantom than those of the MLE. Therefore, the
se-lection of the penalty parameter is important.
The choice of penalty term is substantial as well.
Green [20] suggested another form of penalty form,
log {cosh(A(bo) - A(b, )} , where the sum is taken
over the neighboring pixel pairs. The resulting EM al-gorithm is difficult to obtain a closed form solution in the M-step. He proposed the One-Step-Late (OSL) al-gorithm that approximates the current solution via the previous solution in the M-step. These penalized terms can also be interpreted in the Bayesian framework. Geman and Geman [22] used the global energy func-tion with Gibbs sampling technique to obtain the Bayesian reconstruction. Ouyang et al. [17] tried to in-corporate the local smoothness contained in the boundaries to the Bayesian reconstruction by Gibbs samplings. In order to achieve this goal, they need to consider the energy function in the presence of line site induced by boundaries. While it is appealing in com-bining the local smoothness information, the computa-tion and complexity is quite demanding. In this paper, we propose a more efficient way to make use of the lo-cal structure as presented in the following section.
3. CROSS-REFERENCE MLE-EM
Since a boundary defines a region that is likely to have homogeneous emission intensities, we can get a mean estimate, AMF.AN , by doing the local average of the MLE within the boundaries. For instance, if the boundaries are as in Figure 5, the mean estimate is as Figure 6. However, the anatomical boundary may not be consistent with the functional boundary. That is, the boundary information may be incomplete. For example, the boundaries in Figure 5 do not contain all the boundaries in Figure 1. Thus, the mean estimate is only a rough estimate for the purpose of reference. In order to retain the local structure in the MLE, one needs to cross-refer the MLE and the mean estimate. Thus, we define the Cross-Reference MLE (CRMLE) as
AcRMLE = arg min,,, m(il) , (6) where
O(A)=-l(A)+aIIA-A. 112, (7) a > 0 and 2-norm is used for the penalty term. Suppose a - 0 , then A,RNLE - AMLE If a - - , then A." - AMEAE • The resulting images by the CRMLE for one penalty parameter are shown in Figure 7. It is evident from Figure 7 that the CRMLE can borrow the strength from the local smoothness information via choosing a proper penalty parameter.
The Lagrangian function can be obtained after
in-troducing the Lagrangian multiplier , /3 = (/3(1), /3(2),
plied to find the MLE satisfying the KT conditions.
Note that this is exactly the corresponding EM
algo-rithm for the penalized likelihood in equation (7), not
the One-Step-Late algorithm in [20]. The E-step
needs to calculate
Q(A""" I e
)- a llV - -AM 112
>p(b, d)A (b) +;;1og[ p(b,d)X-(b)}n (d) p( b,d)7^ d(b) ^e-,p(b',d)e(b)
-a II A -AM
IIz,
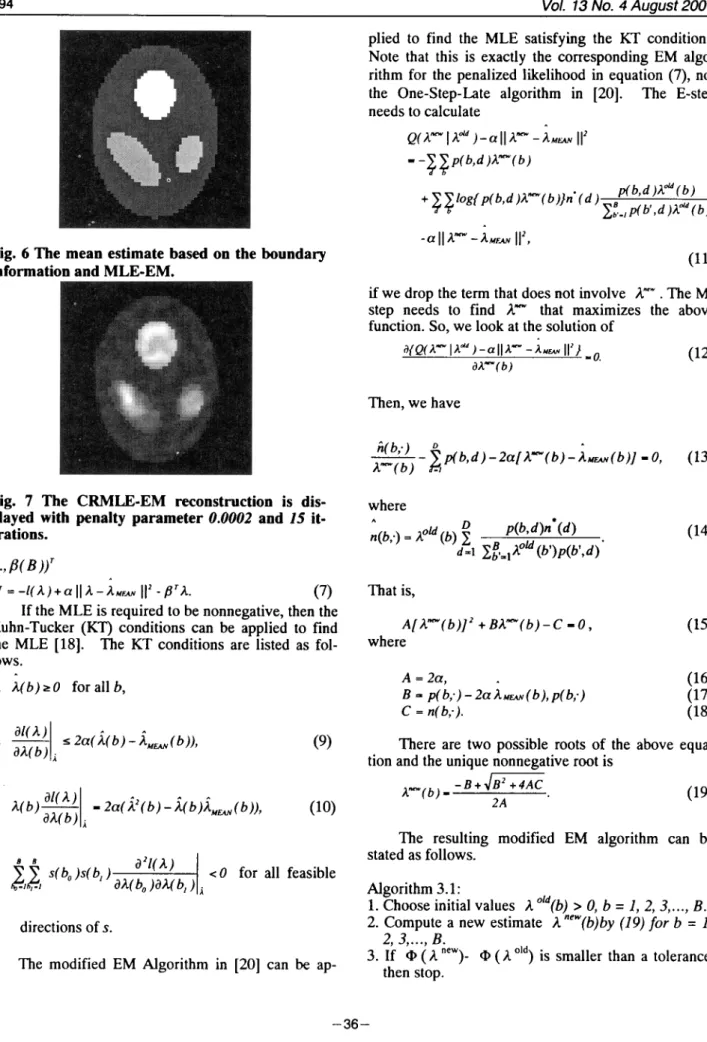
Fig. 6 The mean estimate based on the boundary
information and MLE-EM.
a{Q(A-I ) -aII
A'
-AMEAN11
2"
0
.(12)
al-(b) Then, we have n(b;) n b d 2 k- b A b 0 13 fi (b) - p( , ) - a[, ( ) - M&( )J = , ( ) where n(b,,) _ e' (b) 2 p(b,d)n*(d)(14)
d=1 Xb-4A°"(b')p(b',d) That is, A[A"(b)] 2 +BA-(b)-C =0, (15)where
A = 2a, .
(16)
B = p(b,) - 2a AME.,N (b), p(b,•) (17)C=n(b;).
(18)
if we drop the term that does not involve A,
X" . The
M-step needs to find X- that maximizes the above
function . So, we look at the solution of
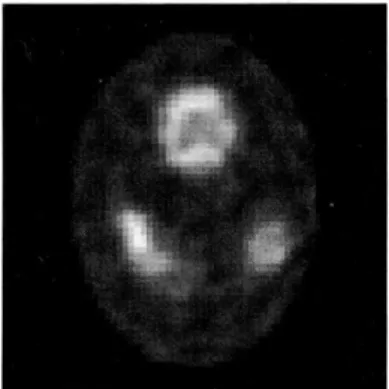
Fig. 7 The CRMLE -EM reconstruction is
dis-played with penalty parameter 0.0002 and 15
it-erations.
.... P(B ))T
W = -1(A) + a I I A- A.
I I2
- f T.t. (7)If the MLE is required to be nonnegative , then the
Kuhn-Tucker (KT) conditions can be applied to find
the MLE [18].
The KT conditions are listed as
fol-lows.
1. A(b) Z0 forallb,
2 a1(A.)al(b)
z
s 2a(A(b) - AME,w (b)),3. A(b) al(A) al(b)
4. S(bo )S(b,) al(bo
) aA(b, )
directions of s.
< 0 for all feasible
i
The modified EM Algorithm in [20] can be
ap-(9)
=2a(A2(b)-A(b)AM ( b)), (10)
x
a21(A)
There are two possible roots of the above
equa-tion and the unique nonnegative root is(b)=-B+ B2+4AC 2A
(11)
(19)
The resulting modified EM algorithm can be
stated as follows.
Algorithm 3.1:
1. Choose initial values A "d(b) > 0, b = 1, 2, 3,..., B.
2. Compute a new estimate A "'(b)by (19) for b = 1,
2, 3,..., B.
3. If
1 (A
new)_ (D(
)old)is smaller than a tolerance,
then stop.
-36-APPLICATIONS, BASIS & COMMUNICATIONS
Otherwise, go to step 2 with A old replaced by A new
The computation cost and complexity for the
pro-posed modified EM algorithm of CRMLE is of the same order as those of the MLE-EM. The convergence can be assured for any AMEAN because we only need to shift the origin to AMEAN and use the Proposition in Green [20]. Thus, the monotonic convergence also holds for the modified EM algorithm of CRMLE. That is, the computation advantages of the EM algo-rithm are intrinsic to the modified EM algoalgo-rithm in finding the CRMLE. The finite sample behaviors of CRMLE and the selection of penalty parameters are explored in the following section.
4. IMPLEMENTATION AND
DISCUSSIONS
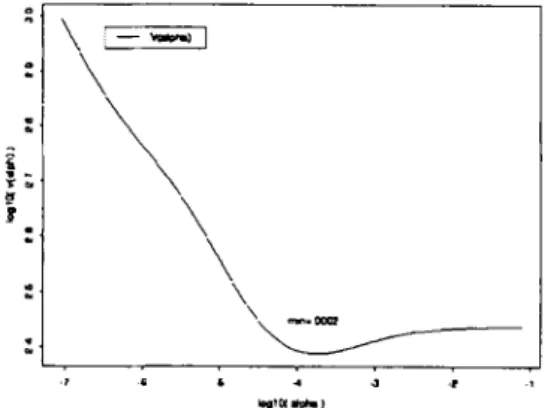
In contrast to the selection of a good iteration number such that the log-likelihood of MLE-EM is close to that of the true phantom as in Figure 2 for the MLE-EM, the more crucial factor for the CRMLE is selection of the penalty parameter. The finite sample behaviors of CRMLE depend heavily on the choice of penalty parameters. The log-likelihood of the mean es-timate is usually smaller than those of the true phan-tom and MLE as one can see in Figure 8. This is be-cause the incomplete boundaries will oversmooth the image and pull down the log-likelihood to be below that of the true phantom. Since the log-likelihood of the true phantom lies somewhere in between those of MLE and mean estimate, it is reasonable to use the
log CRMLE --- log M ---- lag MEPN
--- log TRIE
mean estimate as a reference point in the framework of
MLE. As a - 0, the log-likelihood of CRMLE
will approach that of the MLE. But if a - oo , the
log-likelihood of the CRMLE will decrease to that of
the mean estimate. Thus, with a proper choice of a ,
the log-likelihood of CRMLE would be about the same
as that of the true phantom. If the discrepancy
meas-ure is changed from the log-likelihood differences to
the 2-norm differences with respect to the true
phan-tom, the influences of penalty parameters in terms of
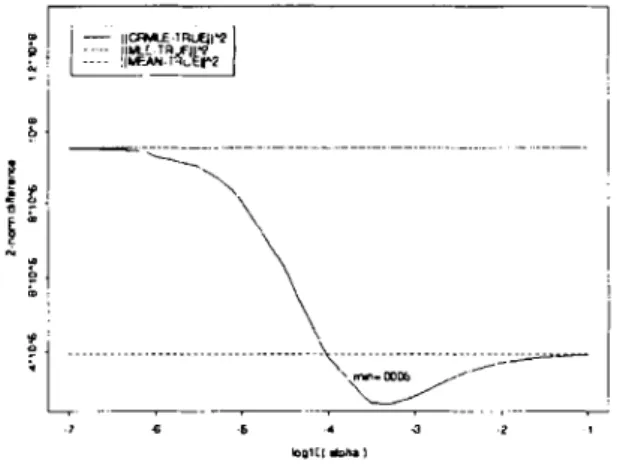
2-norm differences are shown in Figure 9. If the
pen-alty parameter is chosen in the neighborhood of
mini-mum point, 0.0005, the CRMLE can indeed beat the
mean estimate and MLE both numerically in Figure 9
and visually in Figure 7. The optimal values of a
may be slightly different in Figure 8 and 9 owing to
the difference of discrepancy measures.
In practice, the true phantom is unknown and the optimal value of a is impossible to obtain from the plots in Figure 8 or 9. One may consider a dynamic graph function, such as a scrolling box or slider, to choose a proper a with user's interactions. Another way is to reroute to an automatically data-driven choice of penalty parameters. Leave-one-out cross-validation is one possible way. The idea is to remove one observation at a time. The remaining observations can be used to estimate the parameters. The fitted pa-rameters can be applied to predict the value that is omitted. The sum of prediction square errors would depend on the penalty parameters. The minimum value of the sum of prediction square errors can provide a suitable choice for the penalty parameters. This method can be generalized to the transformed model of
1=11--- --- ... ____ MN.1 LJE' 2
---
---d 1og70(,ipha ) 3 -2Fig. 8 The log-likelihoods of the CRMLE-EM, the
converging MLE, the mean estimate and the true
phantom with respect to penalty parameters are
displayed.
---
__---__-n-.000.5
logt 0( Apha )
Fig. 9 The 2-norm differences of the CRMLE-EM,
the converging MLE, the mean estimate and the
true phantom with respect to penalty parameters
are displayed.
ridge regression such that the resulting choice of
pen-alty parameters is rotational invariant. This is called
as the generalized cross-validation (GCV) [23]. The
GCV function of the ridge estimate for the PET
recon-struction may be derived as
I
^^D Da z 2
V(a) = D r d, +Da) Z' (20) D
{D
d DDa
+(D-D')1}:where M = [p(b,d)]T, d, together with u;, i=1, 2, ..., D, are the eigenvalues and eigenvectors of MMT, D' is the rank of MMT, z, = u, y*, andy*(d) - n'(d)-y'ba(b,d) &,(b) The GCV function against the penalty parameters is plotted in Figure 10. The minimum value, 0.0002, is slightly different than the minimum values, 0.0005, in Figure 8 and 9. The CRMLE with a proper penalty pa-rameter selected in Figure 10 is shown in Figure 7. These two reconstructions do not differ too much in quality. If the boundary information is complete and correct, then the mean estimate will be a very good es-timate. However, if the boundary information is in-complete or incorrect, then the mean estimate will oversmooth and mask the local fine structures. Via the CRMLE with a proper penalty parameter, we can keep the local fine structures and make use of the boundary information at the same time . The resulting reconstruc-tion image in Figure 7 is very promising.
In calculating the GCV function, the eigenvalues
and eigenvectors of MMT are needed. The eigenvalue
or singular value decomposition (EVD or SVD) for a
matrix, symmetric or not, can be obtained by the
imsl_f_eig_sym or imsl_f_lin_svd_gen functions in
the IMSL C/MATH library for small- to medium-size
matrices. Due to the limit of hardware, the above
func-tion does not work for large-size matrices. The power
\ mn..066f
-6
"lot alo')
Fig. 10. The GCV curve with respect to penalty
parameters is drawn
method together with deflation [24] can be applied
then to obtain the EVD or SVD. The eigenvalues
ob-tained by the IMSL and power methods are not the
same. To check the correctness of these two
ap-proaches, we can plot the error of I MM T u; - d, u, I , in
2-norm, for all eigenvalues d, and eigenvectors u,. We
find that the IMSL function does not get the right EVD
at the beginning part and does a good job at the ending
part. The power method is on the contrary. Therefore,
if the leading part of EVD is needed, the power
method is proper. But if the ending part of EVD is
portant, then the IMSL method is suitable. An
im-proved numerical technique dominates the IMSL and
power methods will be certainly useful in order to find
the correct GCV. The EVD is quite computation
de-manding. But it is only needed to be done in one time
since the matrix M = [p(b,d)JT is fixed once the
con-figuration of PET system is set up.
If the boundaries are not only incomplete but also incorrect due to misalignment, the mean estimate will be even far away from the true phantom. However, the CRMLE can still pull out the useful information with unsharp boundaries for those incorrectly specified boundaries. That is, the CRMLE can distinguish the correctly and incorrectly specified boundaries auto-matically. For those correctly specified boundary in-formation, the CRMLE makes full use of the informa-tion because the mean estimate and MLE agree with each other. On the other hand, for the incorrect bound-ary information, the CRMLE recognizes the incorrect-ness and finds a good balance point between the mean estimate and MLE. If the boundaries are severely in-complete and incorrect, the mean estimate may even have larger 2-norm differences with respect to the true phantom than that of the MLE. The CRMLE can still outperform the MLE and the mean estimate. For in-stance, if the boundaries are so incomplete that there are only a half circle available in Figure 11, the mean estimate will lose the other half part of an ellipse.
Fig. 11. The incomplete boundary information is
shown.
-38-APPLICATIONS, BASIS & COMMUNICATIONS
Fig. 12 The CRMLE-EM reconstruction is
dis-played with penalty parameter 0.0003 and 15
itera-tions.
Fig. 13 Test phantom 2 is shown.
However, the CRMLE will make up the lost part as in Figure 12. The parameter, a = 0.0003, in Figure 12 is chosen because it minimizes both the GCV and 2-norm difference curves. The distinguished capability in extracting the useful portion of the severely incomplete and incorrect boundary information has been observed in many other experiments for CRMLE, which are not shown in this paper for succinctness. To see the above phenomena in a higher resolution, the number of boxes is raised to Nb * Nb = 128 * 128 and the number of de-tectors increases to Nd = 128. We also illustrate this in a different test phantom as in Figure 13. An extreme case is that we may have incomplete boundaries that have holes as in Figure 14. The boundaries may be in-correctly located as well. The mean estimate is quite far away from the test phantom 2 in Figure 15. For the parameter, a = 0.0005, that minimize the 2-norm differences, the reconstruction of CRMLE is shown in Figure 15. The CRMLE can even fill up the holes when the penalty parameter is small enough, say a
= 0.0002. In any case, the CRMLE is quite robust to
the misspecification and misalignment of boundaries. If the boundaries are complete and correct, then the mean estimate is a proper estimate. But if there is any doubt about the specification and alignment of boundaries, one shall use the CRMLE to reduce the
197
Fig. 14 The incomplete boundary information is
displayed.
Fig. 15 The CRMLE-EM reconstruction is
dis-played with penalty parameter 0.0005 and 10
itera-tions.
effects of misspecification and misalignment.
5. CONCLUSIONS AND FUTURE
WORKS
It has been shown in this study that the proposed CRMLE may take advantage of incomplete or incor-rect boundary information effectively. By introducing the penalty parameters, one can do the dedicatory bal-ance between the likelihood function and local smoothness within boundaries. By the modified EM algorithm derived, the computation speed and cost are of the same order as the MLE-EM. This makes the CRMLE-EM computationally feasible. Through either human interactions or the generalized cross-validation method, we can choose a suitable penalty parameter to do the fine tune-ups. The Monte Carlo studies demon-strate the improvements of the CRMLE over the MLE. While the simulation results have confirmed that the CRMLE is a very promising approach, further studies are definitely required to make this scheme clinically
applicable. Some important topics are how to register
the boundary information from other imaging modali-
ties on a PET, how to estimate the boundary if no other
imaging modality is available, how to select penalty
parameter more efficiently, etc. In addition, we would
like to apply the proposed CRMLE algorithm to the
real PET images as the next step.
ACKNOWLEDGMENTS
The authors would like to thank Professors I.-S.
Chang, C. A. Hsiung, B. M. W. Tsui and W. H. Wong
for their helpful discussions. This work was sup-
ported in part by the National Science Council of Tai-
wan, R. 0. C.
REFERENCES
1.
Luo WA: Incorporating Sactial-Invariance Feature
in Filter-Backprojection Algorithms. Master Thesis,
National Taiwan University, 1996.
2. Shepp
LA
and Vardi Y: Maximum Likelihood Re-
construction for Emission Tomography. IEEE
Trans Med Imaging 1982;
1:
113-122.
3. Lange K and Carson R: EM Reconstruction Algo-
rithms for Emission and Transmission Tomography.
J Comput Assist Tomog 1984; 8: 306-316.
4. Vardi Y: Network Tomography
:Estimating
Source-Destination Traffic Intensities from Link
Data. Journal of the American Statical Association
1996; 91(433): 365-377.
5.Politte DG and Snyder DL: Corrections for Acciden-
tal Coincidences and Attenuation in Maxirnum-
Likelihood Image Reconstruction for Positron-
Emission Tomography. IEEE Transactions. on
Medical Imaging 1991; lO(1): 82-89.
6. Fessler JA, Clinthorne NH and Rogers WL: On
Complete-Data Spaces for PET Reconstruction Al-
gorithms. IEEE Transactions on Nuclear Science
1993; 40(4): 1055-1061.
7.
Snyder DL and Miller MI: Random Point Processes
in Time and Space. Springer,
znd
Ed., 1991.
8. Joyce LS and Root
'WL:
Precision Bounds in Sup-
perresolution Processing. J. Opt. Soc. Am. A 1983;
1: 149-168.
9. Lu HHS and Wells
MT: Minimax Theory for
La-
tent Function Estimation. Technical Report, Na-
tional Chiao Tung University, 1994.
10.Lu HHS and Wells
MT:
Adaptive Constrained
Method of Regularization Estimators for Latent
Density Estimation. Technical Report, National
Chiao Tung University, 1994.
11.Snyder DL, Miller MI, Thomas LIJ, and Politte DG:
Noise and Edge Artifacts in Maximum-Likelihood
Reconstructions for Emission Tomography. IEEE
Transactions on Medical Imaging 1987; 6: 228-238.
12.Veklerov
E and Llacer J: Stopping Rule for The
MLE Algorithm Based on StatisticalHypothesis
Testing. IEEE Trans. on Medical Imaging 1987;
6(4): 313-319.
13.Snyder DL and Miller MI: The Use of Sieves to
Stabilize Images Produced with The EM Algorithm
for Emission Tomography. IEEE Transactions on
Nuclear Science 1985; NS-32(5): 3864-3872.
14.Hebe1-t T and Leahy R: A Generalized EM Algo-
rithm for 3D Bayesian Reconstruction from Pois-
son Data Using Gibbs Priors. IEEE Trans. on
Medical Imaging 1989; 8(2): 194-202.
15. Green PJ: Bayesian Reconstructions from Emission
Tomography Data Using A Modified EM Algo-
rithm. IEEE Trans. Med. Imaging 1990; 9: 84-93.
16.Herman GT, Pierro ARD, and Gai N: On Methods
for Maximum A Posteriori Image Reconstruction
with A Normal Prior. Journal of Visual Communi-
cation and Image Representation 1992; 3(4): 316-
324.
17.0uyang X, Wong WH, Johnson VE, Hu X, and
Chen CT: Incorporation of Correlated Structural
Images in PET Image Reconstruction. IEEE Trans-
actions on Medical Imaging 1994; 13(4): 627-640.
18.Vardi Y, Shepp LA, and Kaufman L: A Statistical
Model for Positron Emission Tomography. Journal
of the American Statical Association 1985; 80: 8-
20.
19.Silverman BW, Jones MC, Wilson
JD, and Nychka
DW: A Smoothed EM Approach to Indirect Esti-
mation Problems, with Particular Reference to
Stereology and Emission Tomography. J. R. Statist.
SW. 1990; B-52(2): 271-324.
20.Green PJ: On Use of The EM Algorithm for Penal-
ized Likelihood Estimation. J. Roy. Statist. Soc.
1990; B-52(3): 453-467.
21.Johnstone IM and Silverman BW: Speed of
Estimation in Positron Emission Tomography and
Related Inverse Problems. Ann. Statist. 1990; 18(1):
251-280.
22.Geman S and Geman D: Stochastic Relaxation,
Gibbs Distribution, and The Bayesian Restoration
of Images. IEEE Trans. Pattern Anal. Machine In-
tell. 1984; 6: 721-740.
23.Golub GH, Heath M, and Wahba G: Generalized
Cross-Validation
As
A Method for Choosing A
Good Ridge Parameter. Tchnometrics 1979; 21(2):
215-223.
24.Parlett BN: The Symmetric Eigenvalue Problem.
Prentice-Hall, 1980.
applicable. Some important topics are how to register
the boundary information from other imaging
modali-ties on a PET, how to estimate the boundary if no other
imaging modality is available, how to select penalty
parameter more efficiently, etc. In addition, we would
like to apply the proposed CRMLE algorithm to the
real PET images as the next step.
ACKNOWLEDGMENTS
The authors would like to thank Professors I.-S.
Chang, C. A. Hsiung, B. M. W. Tsui and W. H. Wong
for their helpful discussions. This work was
sup-ported in part by the National Science Council of
Tai-wan, R. O. C.
REFERENCES
1. Luo WA: Incorporating Sactial-Invariance Feature
in Filter-Backprojection Algorithms. Master Thesis,
National Taiwan University, 1996.
2. Shepp LA and Vardi Y: Maximum Likelihood
Re-construction for Emission Tomography. IEEE
Trans Med Imaging 1982; 1: 113-122.
3. Lange K and Carson R: EM Reconstruction
Algo-rithms for Emission and Transmission Tomography.
J Comput Assist Tomog 1984; 8: 306-316.
4. Vardi Y: Network Tomography : Estimating
Source-Destination Traffic Intensities from Link
Data. Journal of the American Statical Association
1996; 91(433): 365-377.
5.Politte DG and Snyder DL: Corrections for
Acciden-tal Coincidences and Attenuation in
Maximum-Likelihood Image Reconstruction for
Positron-Emission Tomography. IEEE Transactions on
Medical Imaging 1991; 10(1): 82-89.
6. Fessler JA, Clinthome NH and Rogers WL: On
Complete-Data Spaces for PET Reconstruction
Al-gorithms. IEEE Transactions on Nuclear Science
1993; 40(4): 1055-1061.
7. Snyder DL and Miller MI: Random Point Processes
in Time and Space. Springer, 2"d Ed., 1991.
8. Joyce LS and Root WL: Precision Bounds in
Sup-perresolution Processing. J. Opt. Soc. Am. A 1983;
1: 149-168.
9. Lu HHS and Wells MT: Minimax Theory for
La-tent Function Estimation. Technical Report,
Na-tional Chiao Tung University, 1994.
10. Lu HHS and Wells MT: Adaptive Constrained
Method of Regularization Estimators for Latent
Density Estimation. Technical Report, National
Chiao Tung University, 1994.
11.Snyder DL, Miller MI, Thomas LJJ, and Politte DG:
Noise and Edge Artifacts in Maximum-Likelihood
Reconstructions for Emission Tomography. IEEE
Transactions on Medical Imaging 1987; 6: 228-238.
12.Veklerov E and Llacer J: Stopping Rule for The
MLE Algorithm Based on StatisticaiHypothesis
Testing. IEEE Trans. on Medical Imaging 1987;
6(4): 313-319.
13. Snyder DL and Miller MI: The Use of Sieves to
Stabilize Images Produced with The EM Algorithm
for Emission Tomography. IEEE Transactions on
Nuclear Science 1985; NS-32(5): 3864-3872.
14. Hebert T and Leahy R: A Generalized EM
Algo-rithm for 3D Bayesian Reconstruction from
Pois-son Data Using Gibbs Priors. IEEE Trans. on
Medical Imaging 1989; 8(2): 194-202.
15. Green PJ: Bayesian Reconstructions from Emission Tomography Data Using A Modified EM
Algo-rithm. IEEE Trans . Med. Imaging 1990; 9: 84-93.
16. Herman GT, Pierro ARD, and Gai N: On Methods for Maximum A Posteriori Image Reconstruction with A Normal Prior . Journal of Visual
Communi-cation and Image Representation 1992; 3(4):
316-324.
17. Ouyang X, Wong WH, Johnson VE, Hu X, and Chen Cr: Incorporation of Correlated Structural
Images in PET Image Reconstruction . IEEE Trans-actions on Medical Imaging 1994; 13(4): 627-640.