t c 2006 臺灣大學教務處 Academic Affairs Division, National Taiwan University 管
國立臺灣大學工學院土木工程學系 碩士論文
Department of Civil Engineering College of Engineering
National Taiwan University Master Thesis
解四階邊界值問題的李群 SL(4,R)打靶法之研究 The Study of the Lie-group SL(4,R) Shooting
Methods to Solve the Fourth-order Boundary Value Problem
宋康德 Sung, Kang-Te
指導教授:劉進賢 教授
Major Professor: Liu, Chein-Shan PH.D.
中華民國 102 年 7 月
July. 2013
口試委員審定書
iii
誌謝
研究所兩年的學習歷經了不少風風雨雨,也見識了不少起起落落,一路走來 非常感謝有眾位老師、教授們的諄諄教誨與指導,有眾位學長姊學弟妹和同學們 的陪伴,更有數不清的貴人對我的包容與關心讓我得以成長茁壯,並完成這份學 業和這段旅程。
首先我希望感謝我的父母,特別是我的母親胖燕萍女士從小撫養我長大至今,
因而讓我今日有機會在此寫作;再者是我的指導教授劉進賢教授,謝謝劉教授願 意指導我學習和寫作論文,教育我作為一個研究生所應具備的種種。感謝張建仁 教授與陳永為博士在百忙之中尚願意抽空前來口試並審理我的論文,並且不吝於 給予我寶貴的建議與想法使我能將論文更加完善。除此之外,亦要感謝廖文正教 授與葉芳耀博士對我的照顧與指導,使我受益良多。
在各位師長之後,感謝所有在我學生生涯中陪伴我度過、給予我鼓勵的所有 同學朋友們。感謝許寧洵對我的支持與體諒,伴我度過數不清的失意與挫折,與 我成長。感謝楊洪斌、潘威佑、賴勇安、連婉佑、高唯淵及林奕錕等等諸位學長 姊給我的加油開導,讓我堅強。感謝孫培正、陳佑臻、邱耿岑、劉明鑫、邱于軒、
田偉樂、陳柏穎、王宏程、翁緯彬與林君諺等所有研究室同學的陪伴,令我不孤 單。感謝台大土木結構組所有我遇見的每一個人,您們每一位都是我生命中不可 或缺的一部分。
最後我想感謝在我人生中永遠的一群朋友家人,謝謝莊硯凱、應忠豪、郭登 傑、李承翰、王宏文、胡書楷、賴威任、金聖迪、黃彥翔、潘永、孫春雅、陳品 倢、許玳齡、張寧、堀麻耶、姚曉雯、林慧如和林沛婕等等,謝謝有你們至今的 陪伴支持,是我心靈中不可或缺的一道支柱。
謝謝在我生命中經過的每一個人,你們每一個人都豐富了我人生的色彩,使 我的生命看起來是如此地獨一無二。
iii
摘要
在土木工程領域當中,樑柱等結構元件的振動問題是一個非常重要的研究方 向,而其振動方程式可以用一個四階微分方程式來表示。樑與其他支承節點之間 的力傳遞關係,便與此微分方程構成了四階邊界值問題。結合保群算法及李群 S
L(4,R)打靶法,我們可以輕易的求解出此類型邊界值問題的數值解,並且在線性 與非線性方程都有很好的表現,除此之外我們也嘗試應用在特徵值問題上,找出 彈性樑在自由振動時的自然頻率,以及相對應的振動模態。過去使用李群打靶法 求解此類問題時常因為複雜的計算導致求解費時,而本文將改善李群 SL(4,R)打 靶法的代數結構,進而讓運算變得更加簡單有效率。藉著數值算例顯示,李群 S
L(4,R)打靶法對於求解樑柱結構元件的振動問題有相當不錯的精度與效率,並且 簡單而易於使用。
關鍵字:保群算法、李群打靶法、彈性樑、四階微分方程式、振動問題、特徵值 問題
iv
ABSTRACT
There are a lot of problems in civil and structure engineering science that can be described by ordinary differential equation (ODEs). Especially the vibration problems of beam and column are important issues, which can be written as a Fourth-order differential equation. Structure elements like beam or column with their structure bearings will compose the Boundary Value Problems (BVPs). Group Preserving Schemes (GPS) and Lie-group SL(4,R) shooting methods are numerical methods which can easily solve the linear and nonlinear ODEs. Now we try to use these methods to solve the engineering numerical problem like beam vibration or deflection problems. Furthermore, there are some eigenvalue problems in these ODEs that we will also try to solve. In the past, it took a lot of time to solve these ODEs. We will try a better Lie algebra in Lie-group shooting method and make our numerical analysis more efficiency. Finally, we will observe that these numerical methods have good results in solving these boundary value problems, and we hope it can be applied on the development of the civil engineering or other science in the future.
Key words: group preserving schemes (GPS), Lie-group shooting method, elastic beam problem, fourth-order differential equation, vibration problem, eigenvalue problem.
v
目錄
口試委員審定書 ... i
誌謝 ... ii
摘要 ... iii
ABSTRACT ... iv
目錄 ... v
圖表目錄 ... viii
第 一 章 緒論 ... 1
1.1 前言 ... 1
1.2 文獻回顧 ... 2
1.3 研究動機與目的 ... 4
1.4 論文架構 ... 5
第 二 章 數值分析方法 ... 7
2.1 群 ... 8
2.1.1 群的歷史 ... 8
2.1.2 群的定義 ... 9
2.1.3 李群與李代數 ... 11
2.1.4 特殊線性群 ... 13
2.2 保群算法 ... 14
2.2.1 增廣動態系統 ... 14
2.2.2 光錐構造 ... 18
2.2.3 凱萊轉換(Cayley Transformation) ... 20
vi
2.2.4 指數映射(Exponential Mapping) ... 25
2.3 李群打靶法 ... 30
2.3.1 打靶法(shooting method) ... 30
2.3.2 一步保群算法(one-step group preserving method) ... 31
2.3.3 廣義中值定理 ... 32
2.3.4 在光錐上兩點之間的普適李群映射 ... 35
2.3.5 李群 SL(4,R)打靶法 ... 39
2.4 四階龍格─庫塔法 ... 41
第 三 章 單自由度彈性樑的振動問題 ... 45
3.1 尤拉─白努力樑 ... 46
3.1.1 樑理論 ... 46
3.1.2 考慮軸力的樑自由振動問題 ... 49
3.2 四階李代數與特殊線性群 ... 52
3.2.1 擬線性系統 ... 52
3.2.2 自伴隨系統(self-adjoint system) ... 52
3.3 四階簡化李代數結構 ... 54
3.3.1 一元四次方程式 ... 54
3.3.2 簡化李代數矩陣 ... 55
3.3.3 變數變換簡化李代數矩陣 ... 57
3.4 四階李群元素 ... 58
3.4.1 係數矩陣 ... 58
3.4.2 李群元素 G ... 64
3.5 邊界條件 ... 68
第 四 章 數值算例 ... 75
4.1 彈性樑受橫向荷載問題 ... 75
4.1.1 彈性樑數值算例一 ... 75
vii
4.1.2 彈性樑數值算例二 ... 84
4.1.3 彈性樑數值算例三 ... 90
4.2 彈性樑自由振動問題 ... 94
4.2.1 彈性樑數值算例四 ... 94
第 五 章 結論與未來展望 ... 99
參考文獻 ... 101
viii
圖表目錄
圖 2.1 光錐構造以及路徑 ... 18
圖 2.2 一部保群算法 ... 32
圖 2.3 廣義中值原理 ... 33
圖 2.4 向量內積關係 ... 36
圖 2.5 四階精度龍格─庫塔法斜率分配法則 ... 44
圖 3.1 簡支樑的變形 ... 45
圖 3.2 彈性樑自由體圖 ... 47
圖 3.3 樑受垂直向荷載與軸力 ... 49
圖 3.4 樑元素之自由體圖 ... 49
圖 3.5 簡支樑 ... 69
圖 3.6 懸臂樑 ... 69
圖 3.7 雙端自由樑 ... 70
圖 3.8 雙端固定樑 ... 70
圖 3.9 單邊固定單邊鉸支承樑 ... 71
圖 3.10 單邊自由單邊鉸支承樑 ... 71
圖 3.11 單邊定向支承單邊鉸支承樑 ... 72
圖 3.12 雙邊定向支承樑 ... 72
圖 3.13 單邊定向支承單邊固定樑 ... 73
圖 3.14 單邊定向支承單邊自由樑 ... 73
圖 4.1 算例一:簡支樑受均布荷載 ... 75
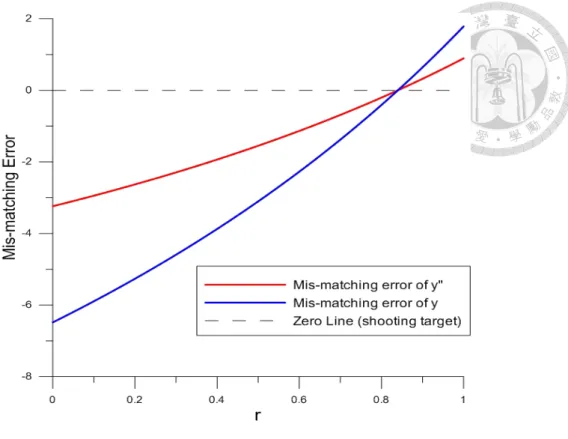
圖 4.2 算例一:Mis-matching Error of y and 1f y ... 77 3f 圖 4.3 算例一:Mis-matching Error of [ ]0,1
( ) ( )
1 2 3 2 min f f r y y ∈ + ... 78ix
表 4.1 不同積分步長之打靶誤差 ... 78
表 4.2 不同積分步長之打靶誤差與轉換係數 ... 79
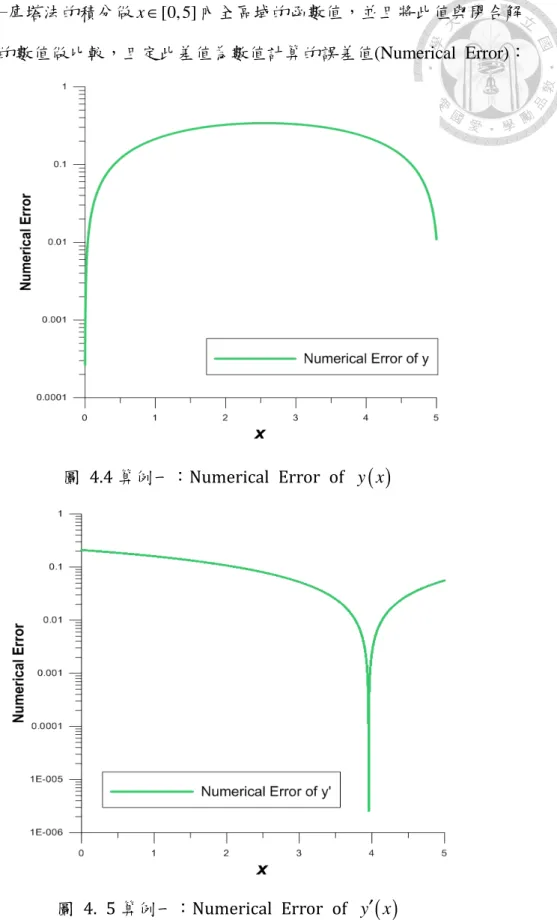
圖 4.4 算例一:Numerical Error of y x ... 80
( )
圖 4.5 算例一:Numerical Error of y x′
( )
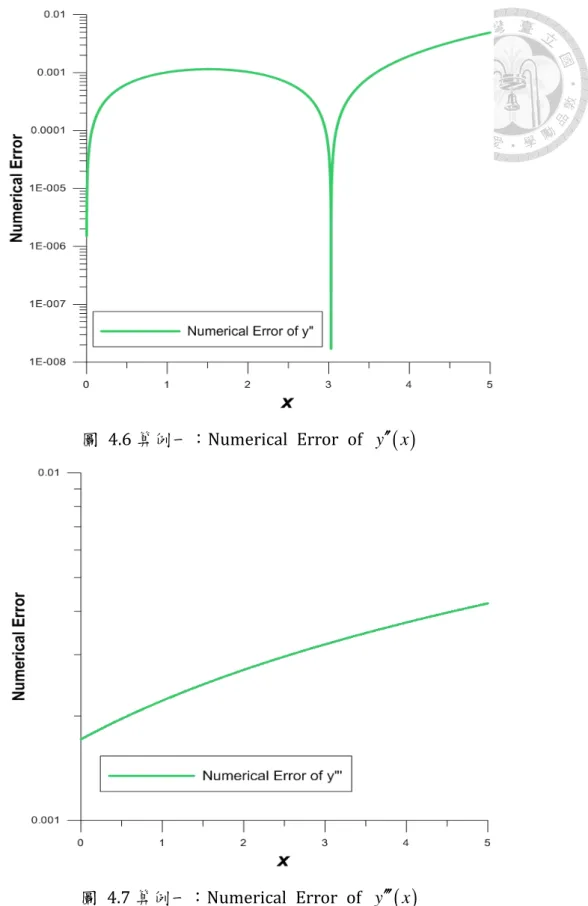
... 80圖 4.6 算例一:Numerical Error of y′′
( )
x ... 81圖 4.7 算例一:Numerical Error of y′′′
( )
x ... 81圖 4.8 算例一:樑的撓曲變化函數y x ... 82
( )
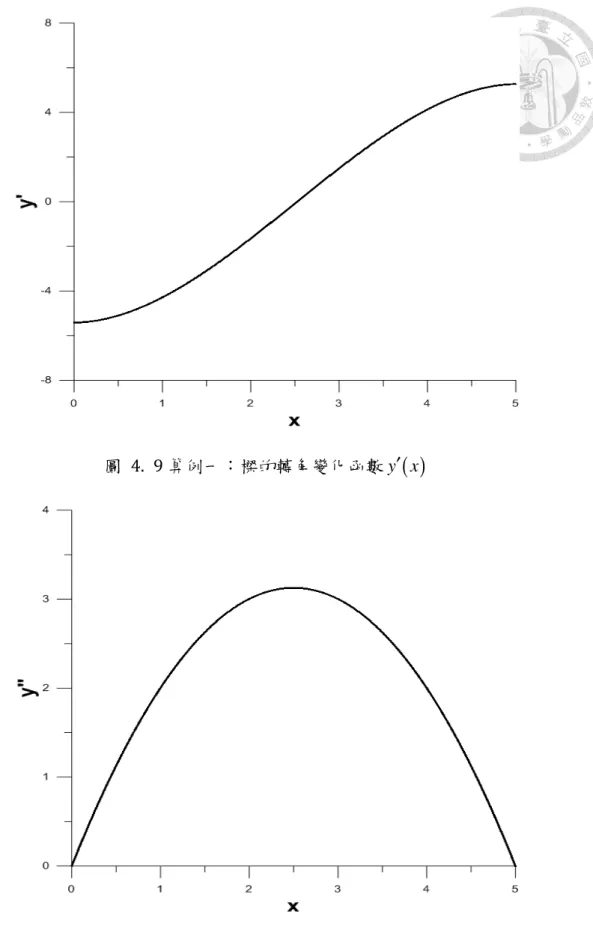
圖 4.9 算例一:樑的轉角變化函數y x′
( )
... 83圖 4.10 算例一:樑的彎矩分佈函數y′′
( )
x ... 83圖 4.11 算例一:樑的剪力分佈函數y′′′
( )
x ... 84圖 4.12 算例二:懸臂樑受橫向荷載 ... 84
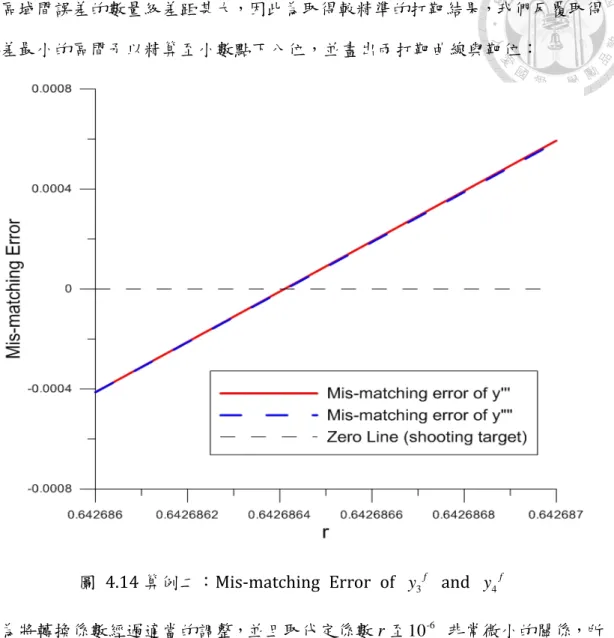
圖 4.13 算例二:Mis-matching Error of y ... 85 3f 圖 4.14 算例二:Mis-matching Error of y and 3f y ... 86 4f 圖 4.15 算例二:Mis-matching Error of [ ]0,1
( ) ( )
3 2 4 2 min f f r y y ∈ + ... 87圖 4.16 算例二:樑的撓曲變化函數y x ... 88
( )
圖 4.17 算例二:樑的轉角變化函數y x′
( )
... 88圖 4.18 算例二:樑的彎矩變化函數y x′′
( )
... 89圖 4.19 算例二:樑的剪力變化函數y′′′
( )
x ... 89 圖 4.20 算例三:Mis-matching Error of y and 3f y ... 91 4fx
圖 4.21 算例三:Miss-matching Error of
[ ]0,1
( ) ( )
3 2 4 2min f f
r y y
∈
+
... 91
圖 4.22 算例三:樑的撓曲變化函數y x ... 92
( )
圖 4.23 算例三:樑的轉角變化函數y x ... 92 '
( )
圖 4.24 算例三:樑的彎矩變化函數y x′′
( )
... 93圖 4.25 算例三:樑的剪力變化函數y x ... 93
( )
圖 4.26 算例四:Miss-matching Error of λ ... 97
圖 4.27 算例四:樑第一振動模態 ... 97
圖 4.28 算例四:樑第二振動模態 ... 98
1
第 一 章 緒論
Equation Section 1
1.1 前言
土木工程廣義而言泛指一切與水、土、文化相關聯的民生基礎建設之計畫、
建造與維護。在土木工程學門眾多的分支方向當中,結構工程是一個非常龐大且 重要的研究領域。研究結構工程的人主在分析受到各種不同荷載及力作用下的結 構體行為,從建築結構、機械結構到汽車結構等都是結構工程師研究的對象。結 構工程的理論大多是建立於龐大的工程經驗的歸納,透過力學、物理規律的分析,
不同的環境因子、材料因子的研究,結構工程師們創造出許許多多簡單的結構構 件,再揉合經驗法則來一一組合成複雜的結構體。
結構工程師最基礎也最重要的研究之一,便是簡單獨立的結構構件,例如樑、
柱、版、牆、拱等等。一個好的結構設計必須要能夠確保大至結構整體,小到每 個結構元件都能夠安全正常地工作,不會有過度的變形或開裂,也不會有材料的 疲勞而致使失效或分離。而在將這些結構元件組合成整體的結構分析前,最重要 的便是掌握這些元件本身的物理性質以及不同的元件之間互相接合的介面性質。
例如一個簡單的樑桿件它會受到溫度、外力的變化而在內部產生不同的撓曲、彎 矩、剪力、扭轉甚至是整體的位移,它與其他結構元件的接合面可能是剛性接合,
也有可能是容許轉動的鉸接合與滾接合,每個不同的因素都會影響結構工程師對 於元件的掌握以及結構整體的設計規劃。
大多數的結構元件在進行模擬時最重要的部分,便是透過數值計算分析其中 的力學行為以及元件變化。藉由古典力學我們可以將這些內外力的交互作用寫成 方程式的形式,並且透過微積分了解不同力之間的關係,將這些不同的內外力整 理並系統化為我們常用的微分方程組作為對結構元件力學行為的分析。除此之外,
2
研究結構元件與其外部連結的形式還有這些連結元件所能夠傳遞的力與不能傳 遞的力,便會形成我們所須知的結構元件其接合面的束制條件(constrain),將束 制條件與內外力的微分方程組相結合成一組邊界值問題,而此束制條件便是我們 的邊界。討論此問題在不同的接合面、受力、溫度以及材料特性等情況下結構元 件的力學行為、變化情形,讓我們可以更好地掌握結構元件的特性,也更好地對 整體結構行為做控制與預測。
將這些物理問題透過方程式或是矩陣等數學工具呈現,並且以簡單而精確的 數值計算方法來解決困難的物理問題,並且持續不斷地尋求更好、更逼真的模擬 及更迅速、更精確的數值計算方法,便是求解此類型問題的核心目標。而本文所 使用的李群打靶法,主旨便在解決具有 n 維線性、非線性邊界值問題的微分方程 組,將邊界值問題轉換為簡單的初始值問題並且用打靶法求解。
李群本身是一個微分流形,它給予這些方程組運算一個簡單的群構造與拓樸 流形,比起其他的演算法李群在求解微分方程的數值解時可以更好地保持其函數 原本的軌跡長度,並且有效地連結初始值、最終值還有各個導函數向量場,讓我 們的打靶計算更簡單、更有效率。
1.2 文獻回顧
樑振動問題在土木工程學門的研究已有長年的歷史,一般最常見的數值 模型便是以尤拉─白努力樑(Euler-Bernoulli beam)的振動問題之研究[1],學者 Naguleswaran[2]則是對變軸力的樑模型進行研究。而對於群理論的研究,則早始 於 19 世紀初期的代數研究。在近代數學家中則有學者 Hall[32]為李群及李代數 的介紹而寫作著述,以及著名的美國學者 Lang[31]所編寫的教科書中亦有討論。
對於求解兩點邊界值問題,最常見的數值方法就是應用兩點相應線性的疊代 算法,例如有限元素法、有限差分法、級數解法、配置法(collocation method)與 簡單打靶法(simple shooting method)。而簡單打靶法更是其中最為容易的數值計
3
算方法,並且早已在 Kubicek and Hlavacek[3], Keller[4]跟 Ascher[5]等人的著述 中被廣為應用。簡單打靶法雖然是一個容易且有用的方法,但對於病態數值問題 (ill-posed problem)的求解則會產生不穩定及不準確的缺點,因此我們需要結合 一些初始值方法來解決,例如:利卡提法(Riccati method)[5]、穩定行進演算法(
stabilized marching method)、多重打靶法(multiple shooting method)或者是修正 簡單打靶法(modified simple shooting method)[6]等。
近年來,學者劉在打靶法的研究上有長足的突破[7]-[9],藉由學者劉[10]的 保群算法(group preserving schemes, GPS)可以將常微分方程式的邊界值問題進 一步轉換為初始值問題並求解,而此方法則稱之為李群打靶法(Lie-group shooti ng method, LGSM),並且由其運算結果可以發現此方法對於求解該類問題有非 常好的效果,深具發展潛力。
關於李群法(Lie-group method)在計算邊界值問題上,始於學者劉利用李群 的封閉性質而創造了一步保群算法(one-step group preserving schemes)[7]來連 結兩點邊界值,進而以打靶法求得數值解。但是該算法並不能隨意地應用在其他 的數值方法上,原因在於其必須利用到李群此種數學結構的特性。學者劉[11]首 先提出此問題,並以時間反向的伯格方程式(backward in time Burgers equation) 作為應用證明,爾後學者劉[12]與其他學者[13]也利用此算法建立一步估算法,
用以估算時變之熱導率問題,以及熱導率和熱容的物理性質[14][15]。並且在[16]
中透過李群打靶法以內部溫度來估算未知邊界條件的熱應力問題、以溫度梯度來 識別時變熱導率(time-dependent heat conductivity)問題。學者劉也以同樣的技巧 來求解史特姆─李奧維爾問題(Sturm-Liouville problems)的特徵值與特徵向量 [17],以及應用在彈性力學的挫曲計算[18]。近年來則是以李群打靶法研究隨時間 變化的阻尼和勁度係數的反算振動問題[19][20],還有多維度非線性邊界值問題 [21]等微分方程問題為主。
4
1.3 研究動機與目的
一般結構元件的模擬分析大多可以分成三大種類:
1. 直線元素(Linear elements) 2. 面元素(Surface elements) 3. 空間元素(Spatial elements)
其中直線元素便是我們最常用於連結兩個支承或是節點的結構元件,最常見的直 線元素便是樑系統與柱系統,其大多力學傳遞的方式都是垂直傳遞或是水平傳遞,
少有特殊的形狀或是結構構成,所以古典力學的角度來討論的其中各種力學作用 相對簡單。除此之外在分析結構元素我們又須考量結構的另外兩大要素:支承與 節點,此三者共同構成一個常微分方程式的邊界值問題。
過去大多將樑柱等直線構件的內力依據微分關係寫作四階常微分方程式,在 不考慮外力為時間函數的前提下,討論在該樑柱構件上某點位的內力分布情形以 及與其支承、節點的關係。而以往在使用李群 SL(4,R)打靶法求解此類樑振動問 題時,必須將樑的微分方程式透過積分因子的變數變換,寫成四階廣義史特姆─
李奧維爾方程式(Fourth-order Generalized Sturm-Liouville equation)的形式,例 如:
( )
2( ) ( ) ( ) ( ) ( )
2 d y x2 dy x , 0
d d
p x s x q x y x
dx dx −dx dx + λ =
(1.1)
其中:
0 f
x < < x x (1.2) 但事實上李群打靶法能夠求解的微分方程式類型並不只侷限於此類型的方程式,
將樑柱系統寫作(1.1)式不但限制了李群打靶法能夠求解的樑問題,並且因為李群 打靶法中的指數映射致使問題的分析變得複雜而低效率。
現今本文便希望透過改良李群 SL(4,R)打靶法中的李群元素與李代數等數學 結構,將李群打靶法在樑柱系統等連續微分方程式上的應用更加一步地推廣,能
5
夠求解更多更複雜的方程式類型不論是對於線性還是非線性的外力或是樑柱,並 且因為簡化李群元素與李代數的緣故,將李群打靶法在此類方程式上的指數映射 困難度降低,提高我們數值計算的效率,並且讓此類數值計算方法能夠更好地幫 助結構工程師做複雜結構元件的模擬與分析。
1.4 論文架構
本文將由五個章節來做論述:
第一章主要在於介紹關於彈性樑本身的撓曲與振動問題的背景與沿革,關於 此類型問題對於土木工程和結構工程的重要性,以及這些物理問題所寫成的數學 形式跟其接合點、斷面所對應的邊界值問題。在文獻回顧中也介紹了過去李群打 靶法的研究歷史和在此類型問題上的應用,以及最後希望藉由改良的李群元素與 李代數來推廣李群打靶法求解邊界值問題的研究目標。
第二章描述本文所使用的數值解法,其中包含了保群算法、一步保群算法、
李群 SL(4,R)打靶法與四階龍格─庫塔法等。保群算法的發展主要是用來求解初 始值問題,劉教授早在 2001 年便已經利用李群此一代數結構的特性建立了保群 算法,發展出可以在運算中持續保持長度量的增廣動態系統,並且以此系統為基 礎持續發展出了其後的一步保群算法、李群打靶法等多種數值計算方法。在不斷 的努力與研究之後,保群算法已不只用於求解初始值問題,而進一步拓展到多維 度的邊界值問題。而此一系列的算法中所會運用到的數學結構與假設,包括群特 性、李群、勞倫茲群、李代數、廣義中值定理、凱萊轉換式以及指數映射轉換等 等,也將一併在第二章中做詳細的說明。
6
第三章主要探討的是單維度下彈性樑系統的振動問題。將一個受外力荷載的 結構元件樑元素上,其每一個點位的內力作力平衡後推導其內力方程式,並且透 過多個方程式之間的微分關係建立合適的李代數數學結構來計算,並且探討關鍵 的李代數結構形式其指數映射轉換的方式,以及對於李群 SL(4,R)打靶法的優劣。
再推導簡化過的李代數求解同樣樑系統的微分方程組,最後探討在不同的樑節點 與支承上我們的樑元素其邊界條件的形式,和如何將李群 SL(4,R)打靶法應用於 我們的邊界值問題。
第四章將會以數個數值算例來檢驗我們的數值計算方法,首先透過簡單的樑 系統來驗證新的李群 SL(4,R)打靶法的可行性,並且觀察其打靶精度與運算效率,
還有與閉合解之間的誤差狀況。接著逐步加入不同的邊界條件、更複雜的外力函 數與非均勻的樑體來檢核同樣的打靶法。最後將其應用於同樣是樑系統的自由振 動特徵方程式上,觀察其在特徵值問題中的打靶表現,並且用打靶結果做出樑的 振動模態來判斷其是否合理,以及其精度、效率。
第五章為結論與未來展望,針對第四章中算例的結果進行討論與反思,分析 李群 SL(4,R)打靶法運用於各種不同的樑系統上的效果如何,並比較優劣性以期 能讓往後的研究更加地進步和優秀。
7
第 二 章 數值分析方法
Equation Section 2
在數值分析研究中,微分方程的初始值問題是一個重要的議題,初始值問題 是由一個微分方程組與其初始條件所共同組成的問題。此初始條件代表的是微分 方程組中函數在某些特定點的函數值,一般可以表示如下:
'( ) ( , ( ))
y t = f t y t (2.1)
其中:
:
f × n
0 0
( , ( ))t y t ∈ × n 在函數 f 的定義域內的點( , ( ))t0 y t0 便稱為初始條件。
除了初始值問題之外,邊界值問題也是另一個重要的研究方向,邊界值問題 是微分方程組和一組稱之為邊界條件的束制條件所組成的,而邊界條件亦可視為 是微分方程組所存在的有效區域中,該區域邊界上的函數形式。例如:
'( ) ( , ( ))
y t = f t y t (2.2)
其中:
2
0 0
: ( , ( ), , ( ))f f
f t y t t y t
×
∈ ×
n
n
在函數 f 的定義域內的( , )t0 tf 便是方程式的有效區域,而( , ( ), , ( ))t0 y t0 tf y tf 便 是此微分方程的邊界條件。
物理學中時常遭遇各種不同的邊界值問題,例如波動方程式、熱傳導方程式 等,其中許多可以歸類為史特姆-李奧維爾方程式(Sturm-Liouville equation),這 類方程式問題的研究也和特徵值問題相關。透過本章的數值計算方法,我們可以 將複雜的邊界值問題進一步轉換為容易求解的初始值問題,再透過數值計算求得 函數的值,本章將介紹求解此類問題所會運用到的理論與數值計算方法,包括群 理論、保群算法(Group Preserving Schemes, GPS)、李群打靶法(Lie-group shooting method)以及四階龍格─庫塔法(Fourth order Runge-Kutta method, RK4)等。
8
2.1 群
2.1.1 群的歷史
群理論的發展歷史可以追溯自三個數學領域:數論、代數方程理論和幾何學。
在數論中最早出現的群的概念始於萊昂哈德·尤拉(Leonhard Euler)對於正整數之 間的研究,接著在高斯(Gauss)對於同餘理論的著作《算術研究》(Disquistiones Arithmeticae)中亦運用並延伸了乘法群與加法群。爾後在十九世紀初,法國數學 家埃瓦里斯特·伽羅瓦(Évariste Galois)為了求解高於 4 次的多項式方程組,而引 進了數體的擴張、置換群、可解群等概念,也是此種代數結構首次被稱為「群」
(Group)。最後,則是在幾何學的發展中群論首次顯現出了它的重要性,菲利克 斯·克萊因(Felix Christian Klein)在 1872 年所發表的愛爾蘭根綱領,便是運用群 理論來建立雙曲幾何、射影幾何等不同的幾何學之間的聯繫關係,而馬里烏斯·
索菲斯·李(Marius Sophus Lie)更進一步發展了這些研究,在 1884 年創立了關於 李群的研究。
經過一系列的研究和發展,群的概念在 1870 年左右形成並牢固建立,現代 群論亦是一門非常活耀的數學學科。為了探索群,數學家們依照各種概念以及需 要來分割、定義群,形成眾多群的分支,包括李群、辛群、商群…等等更小、也 更容易理解與運用的群類。因為群所具有的數學性質相當抽象,數學家還從理論 觀點與數值計算觀點來研究如何具體地表示群所存在的形式與結構,進而有群表 示論(Group representation theory)的研究。而其中在有限群理論的部分發展地特 別豐富,自 1980 年代中葉至今,對有限單群的分類與研究一直都是群論特別活 耀的一個分支。
群在抽象代數中有非常重要的地位,其重要分支如線性代數群(Linear algebraic group)和李群(Lie group)在現今也已形成相對獨立的研究領域。
9
2.1.2 群的定義
群是一種代數結構,乃是由一個元素集合與一個可結合兩個元素並形成第三 個元素之二元運算子所組成的一個完整的架構。一個群的架構必須滿足四項特性 條件,分別為封閉性、結合律、單位元素以及逆元素,這四個性質合起來也稱作
「群公理(Group axioms)」。首先我們定義一個群為集合 G,與一個運算子“⋅ ”,
它結合任意兩個元素 a 和 b 而形成另一個元素,記為 a⋅ b,則群公理可以用以下 的方式表述:
1. 封閉性:a∈G b, ∈G a b⋅ =c c∈G
對於集合 G 中的任意兩元素 a 與 b,進行運算 a b⋅ 的結果 c 也必存在於 此集合 G 之中。
2. 結合律:a b c, , ∈G a b c⋅ ⋅ = ⋅ ⋅( ) (a b c)
對於集合 G 中的所有元素a b, 與 c ,在不改變運算子“⋅ ”位置的情況 下,其運算的順序並不會改變運算結果。
3. 單位元素:a∈G, e∈G a e⋅ = ⋅ =e a a
集合 G 中必存在一個單位元素 e,此元素與其他元素結合時,並不會改 變那些元素。
4. 逆元素:a d, , e∈G a d⋅ = ⋅ =d a e
對於每個存在於集合 G 中的元素 a ,必存在一個元素 d 在與元素 a 進 行運算後會等於單位元素 e 。
值得注意的是,以上四種運算規則並不包含交換律,換句話說,在進行群運 算時,運算的次序是很重要的,將屬於集合 G 中的元素 a 與元素 b 結合,並不 一定會等同於元素 b 與元素 a 的結合,亦即: a b b a⋅ = ⋅ 並非恆成立的。當然能
10
使上式成立並滿足交換律的群亦存在,其被稱作阿貝爾群(Abelian group),例如 整數加法群: a b b a+ = + 便是一種阿貝爾群。
由群公理中所獲得的結論可以再發展出三個推論,其一是重複運用結合律公 理:a b c⋅ ⋅ = ⋅ ⋅( ) (a b c) ,可以證明此公理可以推廣到超過三個元素,括號內的運 算是可以被插入一運算序列的任何項中的;第二則群中的單位元素與逆元素所具 有的唯一性:在同一個群中必定只會有一個單位元素,而群中的每個元素也只會 有一個與之相對應的逆元素,我們可以藉由下述的方式來證明這兩個元素的唯一 性:
假定 e e1, 1 為群G中的兩個單位元素,則:
1 1 2
e = ⋅e e (e2為單位元素)
=e2 (e1為單位元素) 可得證群 G 中的單位元素必唯一。
再令a1−1與a2−1同為群 G 中元素 a 的逆元素,元素 e 為群 G 中的單位元素,則:
1
e= ⋅a a1−
1 1 1
2 2 ( 1 )
a− e a− a a−
⋅ = ⋅ ⋅
由群公理之結合律可知: a2−1⋅ =e (a2−1⋅ ⋅a a) 1−1
1 1
2 1
a− e e a−
⋅ = ⋅
1 1
2 1
a− a−
=
得證每個屬於群 G 的元素 a ,其對應的逆元素a−1必唯一。
最後一個推論,則可以用群中的除法來理解:給定一個群 G 中的元素 a 與 b,
且 G 中存在方程式 x a b⋅ = 的唯一解 x ,則 x 可以由將方程式右乘以a−1解得,即
11
x= ⋅b a−1。同樣地,G 中亦存在方程式a y⋅ =b的唯一解y,透過將方程式左乘
以a−1解得,即y=a−1⋅ 。且此處的解 x 與解b y 並不會相等。則由此可以發現,
群中元素運算的乘法可以視為是一個對自身的雙射(bijection)運算。
有許多的數學系統都遵從以上這些公理,例如一組簡單的整數搭配我們所熟 悉的運算子加減乘除,便足以構成一個群。而若將群公理的公式由具體的群和運 算中抽象出來,便可以利用此種靈活的數學架構來處理起源於抽象代數或是其他 數學分支的實體,而在同時保留處理對象的本質結構、性質。
2.1.3 李群與李代數
西元 1884 年,挪威數學家索菲斯‧李(Sophus Lie)為了研究微分方程進而創 造了連續對稱理論,後人為了紀念他便以李群命名此種群。並且李群也在現今的 數值分析研究中佔有非常重要的地位。
在數學中,李群是具有群結構的流形(Manifold),並且群中的加法運算和逆 元素運算均為是流形中的可解析映射。此處的流形是一種在數學中用於結束幾何 的模型,它在微觀的局部結構具有歐幾里得空間(Euclidean Space)的性質,此時 他的局部結構形式都是固定的;而在整體的結構上則是保持拓撲結構的特性,可 以有所變形。換言之,李群是一個在微觀上可以容納微分結構,並在整體上可以 接受局部擾動的群模型,是一種適合用於研究有需要考慮局部獨立擾動的數學或 是物理問題的群結構。
李群 G 的基本定義可以描述為:
1. G 為一具有有限維度的實解析光滑流形(或稱微分流形),可以在其上進行微 分運算。
2. G 的二元運算與逆元素運算皆為解析映射,且其運算因子中的乘法運算映射
G G× → 與逆運算映射GG → 均滿足群公理,因而具有群的結構。 G 3. G 可以擁有無限個元素,且其可為時間之函數。
12
另外,在數學上,李代數則是一種代數結構,主要用於研究像是李群與其他 微分流形之類的幾何對象。李代數同樣是數學家索菲斯‧李(Sophus Lie)在發展 連續對稱理論時,為研究無窮小變換的概念而引入的。過去也有文獻以無窮小群 (Infinitesimal Group)來指稱李代數。李代數是一個域(field)代數,在某個域F上 的向量空間 L,其二元運算可表示為:[ , ] :⋅ ⋅ L L× →L,稱之為李括號。李括號必 滿足下述的特性:
[1] 雙線性:
對域F中的所有純量及向量空間L中的所有元素:∀a b, ∈F, ∀x y z, , ∈L, 均滿足以下二式:
[ax+by z, ]=a x z[ , ]+b y z[ , ] (2.3) [ ,z ax+by]=a z x[ , ]+b z y[ , ] (2.4) [2] 交替性:
對向量空間L中的每一個元素: x L∈ ,均滿足此方程式:
[x, x]=0 (2.5)
[3] 雅可比恆等式(The Jacobi identity):
對向量空間L中的每一個元素:x y z, , ∈L ,均滿足此方程式:
[ ,[ , ]] [ ,[ , ]] [ ,[x, y]]x y z + y z x + z =0 (2.6) 其首兩個條件雙線性與交替性亦包含反對稱性質:
對向量空間L中的每一個元素:x y, ∈L
[ , ]x y = −[ , ]y x (2.7)
而值得注意的是,用李括號來表示的乘法並不一定符合結合律,亦即[[ , ], ]x y z 與
[ ,[ , ]]x y z 並不一定相等。也因此李代數通常並非環結構或是結合代數結構。
李代數可以表示為李群在單位元素上的局部特徵,反之,藉著指數映射或源 自李代數的葉狀結構,我們亦可以將李代數的性質提昇到李群的層次。例如:連 通李群 G 是交換群,則若且唯若李代數 g 是交換李代數。
13
2.1.4 特殊線性群
特殊線性群(Special Linear Group, SL)在數學中可以視為是一般線性群的 其中一個子群,故要解釋特殊線性群便必須由其母群一般線性群來定義:所謂的
n 次一般線性群是指在任何域 F 或是環 R 上一個帶有來自 F (或 R )的元素的 n n× 可逆矩陣的集合,和與之相伴的矩陣乘法作為群運算子,如此便構成了一個 群結構。而之所以命名為一般線性群是因為可逆矩陣的縱列是線性獨立的,因此 由此群所定義的向量、點位應是在一般線性位置上,且群中的矩陣也是在一般線 性位置上的點位做變換,所以必須規定矩陣的元素是何種類型。例如在實數集合 R 上的 n 次一般線性群是實數的 n n× 可逆矩陣的集合所構成的群,則我們會將 其寫成GL n R 或是( , ) GL Rn( ),縮寫為GL n 。 ( )
群GL n F 和它的子群通常也被稱作一般線性群或是矩陣群,這些群一般用( , ) 於向量/非向量的空間對稱研究,以及多項式的研究。而當一般線性群是位於實 數域上時,群GL n R 實際上便是( , ) n 維度的實數李群。另外,若2 n≥2時,群
( , )
GL n F 是不能滿足交換律的,故並非阿貝爾群。
本文所使用的特殊線性群則是屬於一般線性群中的子群的一種,同樣地,在 任意域 F 或是環 R 上 n 次特殊線性群則可以寫作SL n F 。特殊線性群是指在一( , ) 般線性群中所有矩陣之行列式值皆為 1 的元素所組成的群,因為這些矩陣實際上 是由滿足一組多項式方程式的代數結構所映射而來,在沒有減根的情況下,由其 矩陣元素運算而得的行列式值會是 1。也因為此特性,所以實數域上的特殊線性 群SL n R 是一個可以保持體積和方向不變的( , ) R 的線性變換群。 n
14
2.2 保群算法
2.2.1 增廣動態系統
真實世界的物體問題常可以表示為具有有限維度的 n 維系統,進而化成 n 階 常微分方程式系統:
x = f t( , ), x t∈, x∈n, f ∈ (2.8) n 其中 x 為 n 維度的狀態向量, t 為時間向量,而 f 則是 x 跟 t 所組成的函數。
接著定義一個新的單位向量:
:= x
n x (2.9)
對任意x≠0,x := x x =⋅ x x 為向量T x在歐幾里得空間(Euclidean Space)中的 範數(norm),而運算子⋅ 代表兩向量間的內積。我們再將(2.9)式對時間t 做一次微 分,得到:
2 1 1
( ) ( )2( )
2
( )
( )
d dt
− −
=
= + − ⋅
= − ⋅
= − ⋅
n n
x x x x x x
x
x x x x
x x x x
f f
n n
x x
(2.10)
將上式整理為一階微分向量式:
+( f ⋅ ) = f n n n
x x
(2.11)
為求解此式,我們引入一個積分因子:
0 ( ( ), )
(t)= ( ) : ( ) exp ( ) d ( )
i
t
i t
I X t t ξ ξ ξ ξ
ξ
= x
f xx ⋅n (2.12) 其中積分域是由時間ti到 t , ( )x t 為函數x在 t 時刻的值,並假定 ( , )f t x x⋅ ≠0。同15
樣地將此積分因子對時間 t 做一次微分,得到:
0
0
( ) ( ( ), )
( ) exp ( ) d ( )
( ( ), ) ( ( ), t) ( ) exp ( ) d (t)
( ) ( )
( ( ), t) (t) ( )
( )
i
i
t
i t
t
i t
dX t d dt dt t
t t
t X t t
t
ξ ξ ξ ξ
ξ
ξ ξ ξ ξ
ξ
= ⋅
= ⋅ ⋅
= ⋅
x f x n
x
f x f x
x n n
x x
f x n x
(2.13)
整理後可得:
0 0
( ) ( ) X t X t
=f n⋅ x
(2.14)
此(2.14)式便是我們所引入的增廣常微分方程式,將此式帶入原一階微分之向量 式(2.11),得到:
0 0
+ ( ) =
( ) X t X t
n n f
x
(2.15)
將(2.15)式左右同乘以X0( )t 得到:
0 0 0
( ) + ( ) = ( ) X t X t X t f
n n
x
(2.16)
整理為:
(
0( ))
= 0( )d X t X t dt
n f
x (2.17)
便是一條推廣至 n 維的增廣常微分方程式。
合併(2.13)式與(2.17)式並寫成向量矩陣:
0 0
0 0
( , )
( ) ( )
( ) = ( , ) ( ) 0
n
t
X t X t
d
dt X t t X t
T
f x
0 x
n n
f x x
(2.18)
上式之0n代表 n 維的零矩陣。此時,我們再取 x 對時間 t 的一次微分:
d d
dt dt
⋅ ⋅
= ⋅ = = = ⋅
⋅
x x f x
x x x f n
x x x
(2.19)
16
將(2.19)式代入一維的增廣常微分方程(2.14)中:
0 0
X d
dt x = ⋅ =f n x X (2.20)
0
0
0 0
1 1
d d
dt dt X X
d dX
X
=
=
x x x x
(2.21)
將(2.21)兩邊同時積分:
ln x =ln X0+c (2.22) 其中的 c 為一積分常數。
此時帶入(2.12)式中的初始條件y( )ti 進入:
0 ( ( ), )
( ) ( ) exp ( ) d
( ) ( )
i i
t
i i t
i
X t t
t
ξ ξ ξ ξ ξ
= ⋅
=
f xx n
x x
(2.23)
將(2.23)與(2.22)對照可知,常數c= ,且0 X0( )ti = x( )ti ,故向量函數x( )ti 的長 度值等同於積分因子X0( )t ,且由一開始的定義(2.9)式可得: i
X0
= =
x x n n (2.24)
又函數 x( )ti 亦可以視為是歐幾里得空間中的泛數,因此將(2.23)、(2.24)帶入我 們的增廣動態系統(2.18)式中,改寫為:
( , )
( , ) 0
n
t d
dt t
=
T
f x
0 x
x x
x f x x
x
(2.25)
進一步獲得微分向量函數下的增廣動態方程式。至此,我們已經成功地將最初的 (2.8)式轉換為增廣一維的動態系統(2.25),若以更簡單、廣義的形式描述它,可 以寫作:
17
X = AX (2.26)
其中:
0 0
( , ) := = , :=
( , ) 0
n
t
t X
X x t
f x
0 x
n x
X A
f x x
(2.27)
此處的 X 是 n +1 維的向量,A 為 n +1 維的狀態轉換矩陣,同時 A 亦稱作局部李 代數(Local Lie-algebra),是李代數中的正規正時勞倫茲群 (Proper orthochronous Lorentz group)SO n0( ,1)的代數結構,而此種群是表示所有元素在閔氏時空間 (Minkowski space-time)架構下透過勞倫茲轉換(Lorentz transform)所得。其滿足 李群下的特殊正交群(Special orthogonal group, SO)特性:
+ =0
A g gAT (2.28)
其中 g 矩陣為閔氏度量張量:
1 1
1
n n
n
×
×
= −
I 0
g 0 (2.29)
而In表示 n n× 的單位向量矩陣。
簡單地觀察(2.25)式,明顯第一條方程式與原始定義的微分方程式(2.8)是相 同的,此式所代表的是原始的微分方程式問題所提供的非線性動態系統;但是繼 續觀察第二條方程式,它則是透過引入的新的單位向量n變換而得,為了增廣此 非線性系統而給定的閔氏空間結構(Minkoskian structure),並且在引入新的增廣 方程式時,原始方程式所屬的n維實數域 ,也連帶被嵌入至n n+1維的增廣動
態系統Mn+1中。對於原先的非線性動態系統,我們並沒有辦法得知是否具有任 何群構造或是其他的數學特性可以用於求解,但是在經由新增一條增廣方程式後,
我們可以發現矩陣 A 乃是一個具有內部對稱性的矩陣(symmetrical matrix),而獲 得了可供於求解的對稱群結構特性,進而擴展了我們求解微分方程式系統的可能
18
性。這便是保群算法所獨有的的代數構造─增廣動態系統。
2.2.2 光錐構造
阿爾伯特.愛因斯坦(Albert Einstein)在提出狹義相對論之後,其老師赫爾曼.
閔考斯基(Hermann Minkowski)便於 1907 年將其理論與勞倫茲的理論結合,並重 新表述成(3+1)維的時空錐構造,其中光速在各個慣性參考系皆為定值,並命名 為閔考斯基時空(Minkowski space),亦稱閔氏空間。閔氏時空是一個由實數四維 向量為基底所構成的空間,其四個維度分別是時間維度與其他三個位置維度。在 此時空內的任何一點,都用以代表一個事件,並且該事件能以此四維向量來描 述。
而在此閔氏時空中能夠與一個單一事件透過光速存在因果關係的所有點的 集合,我們便稱其為構成該事件的光錐(light cone)。光錐可以看作是閔氏時空下 的一束光隨時間演化的軌跡,並且光錐在旋轉、直線運動等勞倫茲變換中,依然 能保有其光錐的構造,並不因轉換而改變。在三維空間中,光錐可以透過兩條正 交的水平軸作空間座標,並將垂直於水平面的垂直軸取為時間座標從而實現其四 維的可視化,其構造通常由兩個對稱的圓錐體構成,如:
圖 2.1 光錐構造以及路徑
19
圖中中央縱軸代表的是時間維度,而上下二圓錐便是當前事件的過去與未來,圓 錐上的線則是路徑。我們現在定義 X 為此時空光錐中某一當前事件的向量集合,
g 為閔氏空間下的度量張量,再以此來描述以下三種關係:
1. 光錐內部的所有點(如圖上 B 點)都可以通過小於光速的速度來與當前事件建 立因果聯繫,它們與當前事件的間隔稱作類時(time-like)間隔:
<0
X gXT (2.30)
2. 光錐表面上的所有點(如圖上路徑 A 點)都可以通過光速與當前事件建立因果 關係,則它們與當前事件的路徑被稱為類光(light-like)路徑或是零(null)路徑:
=0
X gXT (2.31)
3. 光錐外部的所有點(如圖上 C 點)都無法與當前事件建立因果關係,它們與當 前事件的間隔便稱作類空(space-like)間隔:
>0
X gXT (2.32)
現在,透過上一節引進的單位向量(2.9)式:n:=x/ x ,將原始的非線性動 態系統問題增廣為閔式空間中的擬線性動態問題(quasilinear dynamical problem),
如(2.25)式:
( , )
( , ) 0
n
t d
dt t
=
T
f x
0 x
x x
x f x x
x
其中如(2.27):
0
:= X 0 = X
n x
X x
我們將此新的增廣動態系統的閔式空間,化為一個具有光錐結構的具體可視圖,
並且去除其中X=0的點,所以:
20 0
= −
−
T T 2
2 2
X gX y y y
= y y
=
(2.33)
並且由(2.26)式、(2.27)式與(2.29)式推導出:
( )
2 2
2
( , ) ( , )
t t ⋅
= −
= ⋅ − ⋅
T f x x
X gX f x
x f f f n
(2.34)
由柯西不等式: f ≥ ⋅f n ,我們可以推論:
0 0 d d
≥
≥
T
T
X gX X g X
(2.35)
此時再回到光錐構造中,由(2.35)式中我們可以發現,若(2.35)式為類時間隔,
則dX2 ≤0,dX 將會是不應存於現實事件中的虛數。也因此保群算法所導出的實 增廣動態系統(2.26)式,也理所當然地排斥類時間隔,而這也是為何我們選擇光 錐結構中的類空路徑來作為保群算法的時空構造。此即保群算法所具有的的幾何 空間構造─光錐構造。
2.2.3 凱萊轉換(Cayley Transformation)
由前兩節所述,保群算法所具有之代數結構為一個增廣的動態系統;幾何結 構則是由一個光錐構造所組成,因此當我們現在要選擇合適的轉換方法來進行數 值疊代運算時,如何保持以上此兩種構造的穩定而不發散就是我們選擇方法的依 歸。在此,我們首先考慮三種方法來進行 ( )X t 到 (X t+ Δt)的映射:
1. 前向尤拉法(Forward Euler method):
( ) ( )
( ) ( )
t t t
t t t
+ Δ − = Δ
X X
A X (2.36)
2. 後向尤拉法(Backward Euler method):
( ) ( )
( ) ( )
t t t
t t t t t
+ Δ − = + Δ + Δ Δ
X X
A X (2.37)
21
3. 中央尤拉法(Middle Euler method):
[ ]
( ) ( ) 1
( ) ( ) ( ) ( ) 2
t t t
t t t t t t
t
+ Δ − = + + Δ + Δ Δ
X X
A X A X (2.38)
將此三種不同的運算方法,代入光錐結構中觀察是否收斂:
I. 前向尤拉法:
由(2.36)式: ( ) ( )
( ) ( )
t t t
t t t
+ Δ − = Δ
X X
A X
(
1)
( ) ( ) ( ) ( ) n ( ) ( )
t t t t t t
t t t
+
+ Δ = + Δ
= + Δ
X X A X
I A X (2.39)
i. 當t= 時: 0
( ) g ( )t t =0
XT X (2.40)
ii. 當 t= + Δ 時: t t
[ ] [ ]
( )
1 1
2
( ) g ( )
( ) ( ) ( ) ( )
( ) ( ) g ( ) ( ) ( )
n n
t t t t
t t t g t t t
t g t t t t g t t g t
+ +
+ Δ + Δ
= + Δ + Δ
= + Δ + Δ + Δ
T
T T
T T T
X X
X I A I A X
X A A A A
(2.41)
其中:
(
( ) g ( ))
0t t t g
Δ AT +A = (2.42)
( )
Δt 2AT( )t gA( )t ≠0 (2.43)可以得證前項尤拉法無法保持光錐結構XTgX=0。 II. 後向尤拉法:
由(2.37)式: ( ) ( )
( ) ( )
t t t
t t t t t
+ Δ − = + Δ + Δ Δ
X X
A X
: 1
τ = n (2.44)
i. 當t= 時: 0
( ) g ( )XT t X t =0 (2.45)
22
ii. 當 t= + Δ 時: t t
[ ]
{
1 1} [ 1 ]
1
( ) g ( )
( ) ( ) ( ) ( )
0
n n
t t t t
t + t t t − g + t t t − t
+ Δ + Δ
= + + Δ Δ + + Δ Δ
≠
T
T T
X X
X I A I A X (2.46)
可以發現後項尤拉法同樣無法保持光錐結構XTgX=0。 III. 中央尤拉法:
假設當 tΔ 極小時 ( )A t =A(t+ Δt),並且給定 :τ = Δt/ 2來進行方程式的化簡,
則(2.38)式:
[ ]
( ) ( ) 1
( ) ( ) ( ) ( ) 2
t t t
t t t t t t
t
+ Δ − = + + Δ + Δ Δ
X X
A X A X
[ ] [ ]
[ ] [
1]
( ) ( ) ( ) ( )+ ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
n n
n n
t t t t t t t t
t t t t t
t t t t t
t t t t
τ τ
τ τ
τ − τ
+ Δ − + Δ =
− + Δ = +
+ Δ = − +
+ Δ =
X A X X A X
I A X I A X
X I A I A X
X G X
(2.47)
其中: G( )t =
[
In−τA( )t] [
−1 In+τA( )t]
(2.48)i. 當t= 時: 0
( ) g ( )XT t X t =0 (2.49) ii. 當 t= + Δ 時: t t
( ) g ( ) ( ) (t) g (t) ( )
t t t t
t t t
+ Δ + Δ
= + Δ
T
T T
X X
X G G X (2.50)
此時我們需要論證GT(t) gG(t)是否滿足長度恆定的結果:已知 g 矩陣為閔氏 度量張量(2.29)式,且其滿足g2 =In+1與gT =g 此二特性,則:
23
( )
( ) ( ) ( )
2 1
1 1
1
1
g g
g g
g g g
n
n
n
n
g g
g g
g
g
+
+
−
+ +
= =
=
=
=
= =
T
T
T
T
T T
G G I
G G I
G G
G G I
G G I G G
(2.51)
得證GTgG=g,故中央尤拉法可以保持保群算法之光錐構造而不至於發散。
接下來,將(2.48)式中的 G 帶入GTgG=g中展開:
[ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ]
1
1 1 1 1
1 1 1 1
2 2
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) 0
T T
n n n n
T T
n n n n
T T T T
T T
T
t t g t t g
t g t t g t
g g t t g t g t g g t t g t g t
g t t g g t t g
g t t g
τ τ τ τ
τ τ τ τ
τ τ τ τ τ τ
− −
+ + + +
+ + + +
− + + − =
+ + = − −
+ + + = − − +
+ = − −
+ =
I A I A I A I A
I A I A I A I A
A A A A A A A A
A A A A
A A
(2.52) 得證其亦符合保群算法之增廣動態系統。
最後,將保群算法之增廣動態系統定義(2.27)式,引入至中央尤拉法所推導得的 (2.47)式、(2.48)式中並令f( )t =ft、X( )t =Xt ,得到:
( )f ftT t t = ft 2
(2.53)
[
( )]
0
t n
t
n T
t t
t
τ
τ τ
−
∴ + =
−
I f
x I A
f x
(2.54)