分类号:TP27 单位代码: 10335 密级: 公开 学号: 21225086
硕士学位论文
中文论文题目: 轮式移动机器人建模与运动控制策略
研究
英文论文题目:Modeling and Motion Control Strategy of Wheeled Mobile Robot
申请人姓名: 邓哲宇 指导教师: 姚斌教授 合作导师: 朱笑丛副教授 专业名称: 机械电子工程 研究方向: 机器人运动控制 所在学院: 机械工程学院
论文提交日期 2015 年 1 月
轮式移动机器人建模与运动控制策略研究
论文作者签名:
指导教师签名:
论文评阅人 1:
评阅人 2:
评阅人 3:
评阅人 4:
评阅人 5:
答辩委员会主席:
委员 1:
委员 2:
委员 3:
委员 4:
委员 5:
答辩日期:
浙江大学研究生学位论文独创性声明
本人声明所呈交的学位论文是本人在导师指导下进行的研究工作及取得的 研究成果。除了文中特别加以标注和致谢的地方外,论文中不包含其他人已经发 表或撰写过的研究成果,也不包含为获得
浙江大学
或其他教育机构的学位或 证书而使用过的材料。与我一同工作的同志对本研究所做的任何贡献均已在论文 中作了明确的说明并表示谢意。
学位论文作者签名: 签字日期: 年 月 日
学位论文版权使用授权书
本学位论文作者完全了解
浙江大学
有权保留并向国家有关部门或机 构送交本论文的复印件和磁盘,允许论文被查阅和借阅。本人授权浙江大学
可以将学位论文的全部或部分内容编入有关数据库进行检索和传播,可以采用影 印、缩印或扫描等复制手段保存、汇编学位论文。
(保密的学位论文在解密后适用本授权书)
学位论文作者签名: 导师签名:
签字日期: 年 月 日 签字日期: 年
浙江大学硕士学位论文 致谢
致谢
感谢国家重点实验室基金、国家千人计划基金对本课题的资助。
岁月如梭,如歌。转眼间,二年半的研究生求学生涯即将结束,回首往昔,
奋斗和辛劳成为丝丝的记忆,甜美和欢笑也尘埃落定。值此毕业论文完成之际,
我谨向所有关心、爱护、帮助我的人们表示最诚挚的感谢与最美好的祝愿。
本学位论文是我攻读硕士学位期间,导师国家千人计划、长江学者姚斌教授 悉心指导与亲切关怀下完成的,论文凝聚了导师的智慧与心血。感谢导师姚斌教 授,作为机电控制领域的国际知名专家,能够细心指导我这样一名普通硕士生。
您敏捷睿智的思维、高深的学术造诣和严谨的治学态度使我在知识层面、科研方 法以及学术作风等方面都受益良多。这两年多,你一直担当我科研道路的领路人,
对我未来的生活产生着积极深远的影响。
感谢导师朱笑丛副教授一直以来的指导、支持和照顾。无论导师姚斌教授是 否在国外教学,您都一直给予我悉心的指导,解决我在科研与生活上的困惑,也 倾注了大量的关心和帮助,同时也为我提供了优越宽松的科研环境。是您在我人 生迷茫的时候开导与鼓励我,也是您在关键时刻的定力支持让我度过各种难关。
感谢课题组王庆丰老师对课题的宝贵建议和帮助。
感谢课题组陈正博士在课题最初开展时给予的指导和帮助,使我快速融入课 题组的研究生活中来,感谢课题组陈珊博士对我研究中问题不断耐心的解答及生 活上的关怀,感谢高德东博士对我科研上工具使用的指导及生活上的帮助,感谢 李聪博士对课题研究上的建议,感谢李超博士在我入校时生活上的帮助及实验室 科研上的探讨,感谢实验室其他研究生对我生活上的帮助。
感谢浙江大学对我的培养,浙大这百年名校所凝聚出来的求是创新、开拓进 取的精神和深厚的底蕴,将深深影响我今后的人生旅程。
感谢我远方的父母、家人对我学业和生活上的关怀、鼓励和支持,您们是我 前进的强大后盾。
最后,谨向所有给予我关心、指导和帮助的老师、亲人、同学和朋友们致以 最诚挚的谢意!
邓哲宇 二零一五年一月于浙大求是园
摘要
本论文受国家重点实验室基金、国家千人计划基金资助。
自 60 年代末期开始的轮式移动机器人(Wheeled Mobile Robot,WMR)研 究起,机器人技术逐渐成熟,并逐渐运用于人们生活的各个方面。针对日益高要 求的控制精度,本文针对一个具体的轮式移动机器人平台提出了两整套的控制策 略,通过算法的优化方法提高系统的运动精度。
首先,轮式移动机器人是一个典型的多输入多输出非完整约束系统,系统中 也存在参数不确定性和模型不确定性。本文针对轮式移动机器人建立了包含直流 电机电磁力学模型在内的完整的动力学模型,并且进行了系统辨识与解耦分析。
其次,根据得到的简化系统模型与实际系统的对比,发现系统存在低频摩擦 力影响与高频模型不确定性影响。为此设计了 µ-synthesis 控制器,该控制器在系 统所能达到的频宽范围内,能最大程度地削弱摩擦力的影响, 并且其中的参数 不确定性模型能够较好的涵盖系统相对高频的模型不确定性,达到了一个较好的 鲁棒特性。其中在轨迹线跟踪实验中设计了内外环控制框架,将 µ-synthesis 控制 器很好地应用到了实际平台。
最后,针对实际中系统辨识存在误差,系统特性也会受到负载、工况、环境 等因素影响的情况,在动力学中进一步设计了自适应鲁棒控制器(ARC),以满 足自适应和鲁棒性能方面的要求。该控制器中使用投影自适应率实时更新模型参 数,结合滑模的控制思想额外附加一个非线性反馈控制项,该项可以使系统具有 较强的鲁棒性能,并且使系统达到一个很快的响应性能。其中在避障实验中设计 了三层控制框架,涵盖了轮式移动机器人系统的路径规划、运动学与动力学控制。
在最上层使用了改进的二叉树路径规划算法,底层的自适应鲁棒控制保证了上层 算法的实际应用性,各层相辅相成,达到避障路径最短的效果。
关键词:轮式移动机器人,建模与辨识,µ-synthesis 控制,自适应鲁棒控制,
二叉树路径规划
浙江大学硕士学位论文 Abstract
Abstract
Robot technology has become more and more mature and has been applied to every aspect of people’s life since the beginning of research on Wheeled Mobile Robot (WMR). This thesis will propose two kinds of control strategy applied to a specific WMR in dynamic to improve motion precision with the method of algorithm optimization.
Firstly, the WMR is a typical multiple input-multiple output nonholonomic system, and parameter uncertainty and model uncertainty exist in the system, so this thesis gives a completed modeling of a specific WMR, including electromagnetic model of DC motor. The parameter of the system is obtained,then the completed model is simplified and compared with the actual system.
Secondly, according to the contrast of the simplified system model and actual system, friction is found existed in low frequency and flexible model uncertainty is found existed in relative high frequency. In order to eliminate influence of the two factors, µ-synthesis control is designed. This control can eliminate the influence of friction in a high efficiency and use a parameter uncertainty model to cover the uncertainties in the relative high frequency, so the proposed µ-synthesis control achieve a good robust performance. A inner-outer control structure is designed to apply µ-synthesis to real system in trajectory tracking experiment.
Lastly, friction, flexibility features and sensor accuracy in the actual system affected the parameter identification results. If the WMR need to carry different objects, model parameters will change, so Adaptive Robust Control (ARC) is designed. A three level control structure is also designed to cover the path planning, kinematics and dynamics of the WMR. The designed control strategy can achieve high motion precision so as to promise the binary-tree path algorithm in high level can applied to actual system successfully.
Keywords: Wheeled Mobile Robot, modeling and identification, µ-synthesis control, ARC control,binary tree path planning
目录
致谢 ...I 摘要 ... II Abstract ... III 目录 ... IV 插图和附表清单 ... VII
第 1 章 绪论 ... 1
1.1 课题研究背景 ... 1
1.2 国内外研究现状 ... 3
1.2.1 移动机器人的运动学和动力学建模 ... 4
1.2.2 移动机器人的运动学和动力学控制 ... 6
1.2.3 移动机器人的路径规划 ... 9
1.3 课题研究意义及研究内容 ... 11
1.3.1 课题的研究意义 ... 11
1.3.2 课题的研究内容 ... 12
1.4 本章小结 ... 13
第 2 章 机器人平台系统搭建及建模 ... 14
2.1 实验平台系统 ... 14
2.1.1 基本架构及系统连接设计 ... 14
2.1.2 传感器标定 ... 16
2.2 轮式移动机器人模型推导 ... 21
2.2.1 运动学模型 ... 21
2.2.2 非完整约束建模分析 ... 22
2.2.3 完整动力学模型 ... 25
2.3 系统辨识 ... 27
2.3.1 物理测量法辨识 ... 27
2.3.2 时频域辨识 ... 29
2.4 本章小结 ... 32
第 3 章 µ-synthesis 鲁棒控制器设计 ... 33
浙江大学硕士学位论文 目录
3.1 模型分析 ... 33
3.1.1 模型解耦 ... 33
3.1.2 模型分析 ... 35
3.2 µ-synthesis 控制器 ... 36
3.2.1 控制方法选择 ... 36
3.2.2 控制方法思想 ... 38
3.2.3 控制器设计过程 ... 40
3.3 实验验证及应用控制框架设计 ... 43
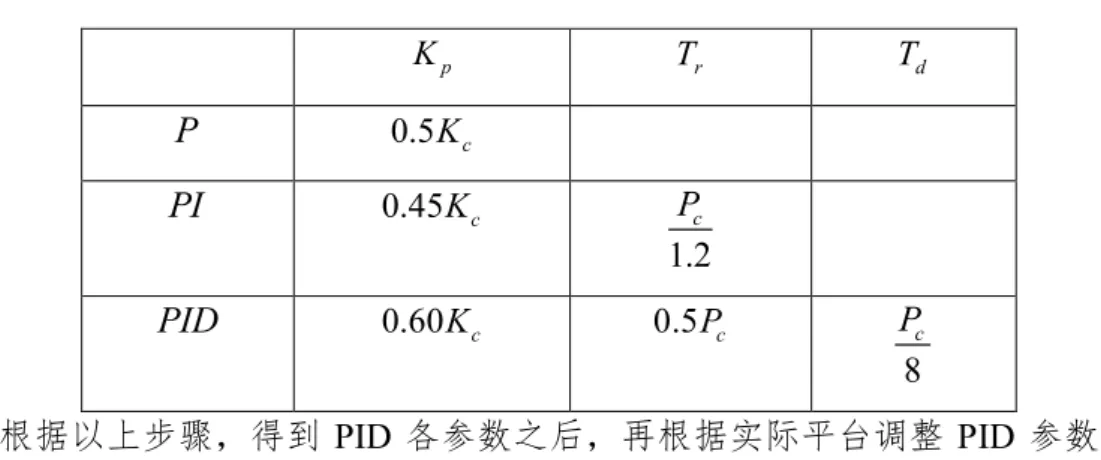
3.3.1 PID 控制器调试 ... 43
3.3.2 动力学速度控制实验 ... 44
3.3.3 内外环控制框架设计及位置跟踪控制实验 ... 46
3.4 本章小结 ... 48
第 4 章 自适应鲁棒控制器设计 ... 49
4.1 控制系统分析 ... 49
4.1.1 问题阐述 ... 49
4.1.2 自适应控制 ... 50
4.1.3 确定性鲁棒控制 ... 51
4.2 自适应鲁棒控制(ARC) ... 52
4.2.1 控制方法优势 ... 52
4.2.2 设计过程 ... 53
4.3 实验验证及应用控制框架设计 ... 55
4.3.1 ARC 参数调节 ... 55
4.3.2 动力学速度控制实验 ... 56
4.3.3 三层控制框架设计及路径规划与跟踪实验 ... 58
4.4 本章小结 ... 64
第 5 章 总结及展望 ... 65
5.1 总结 ... 65
5.2 展望 ... 66
参考文献 ... 67
附录 A ... 71
A.1 电机辨识多组数据自动频域分析 matlab 程序 ... 71
A.2 ARC 仿真参数定义 C 程序 ... 73
A.3 二叉树路径规划算法程序实现 ... 77
浙江大学硕士学位论文 插图和附表清单
插图和附表清单
插图清单
图 1.1 工厂全自动搬运机器人 ... 1
图 1.2 排爆机器人 ... 1
图 1.3 五类轮式移动机器人结构示意图 ... 4
图 1.4 WMR 模型分解图 ... 5
图 1.5 直接线性反馈自适应控制框架 ... 7
图 1.6 轮式移动机器人的自适应模糊滑模控制框架 ... 9
图 1.7 人工势能法示意图 ... 9
图 1.8 目标点、障碍物一维示意图 ... 10
图 2.1 NI Robotics Starter Kit 2.0 ... 14
图 2.2
NI Single Board 9632 ... 15
图 2.3 平台整体硬件联系图 ... 15
图 2.4 图像坐标系 ... 16
图 2.5 图像坐标系与摄像机坐标系 ... 17
图 2.6 摄像机坐标转换关系图 ... 18
图 2.7 棋盘格子标定图像 ... 20
图 2.8 车体示意图 ... 24
图 2.9
轮轴上力矩传递图 ... 26
图 2.10 电机模型 ... 28
图 2.11 电机特性曲线 ... 28
图 2.12 稳态直流电机 T-S 图 ... 29
图 2.13 电机频域响应曲线 ... 30
图 3.1
频率响应对比 ... 36
图 3.2 一般闭环控制系统 ... 37
图 3.3 传统闭环系统(a)、不确定系闭环系统(b) ... 39
图 3.4 权重函数闭环系统方框图 ... 40
图 3.5 速度控制框架 ... 40
图 3.6 带权重函数控制框架 ... 41
图 3.7 不确定性模型幅频图 ... 42
图 3.8 闭环 bode 图 ... 42
图 3.9 误差跟踪对比 ... 45
图 3.10 机器人位姿控制框架 ... 46
图 3.11 机器人跟踪椭圆轨迹 ... 47
图 3.12 移动机器人摄像头坐标系 ... 48
图 4.1 系统辨识影响因素 ... 49
图 4.2 自适应控制框架 ... 51
图 4.3 自适应鲁棒控制 ... 52
图 4.4 无负载角速度跟踪误差对比图 ... 57
图 4.5 有负载角速度跟踪误差对比图 ... 57
图 4.6 三层路径跟踪控制系统 ... 58
图 4.7 二叉树路径规划结果 ... 59
图 4.8 二叉树基准路径图 ... 59
图 4.9 内外切线图 ... 60
图 4.10 障碍物判断 ... 60
图 4.11 二叉树路径规划程序流程图 ... 61
图 4.12 目标点与障碍物 ... 62
图 4.13 二叉树路径跟踪实验 ... 63
附表清单 表 1.1 WMR 的一般运动学模型 ... 5
表 2.1 系统模型参数 ... 31
表 3.1 Z-N 振荡参数调整公式 ... 44
表 3.2 实验性能参数 ... 44
表 4.1 实验性能参数 ... 56
表 4.2 位置误差实验结果 ... 64
浙江大学硕士学位论文 第 1 章 绪论
第 1 章 绪论
1.1 课题研究背景
移动机器人是一个集环境检测、运动决策与规划、行为控制与执行等多功能 于一体的综合系统。它涉及了多学科的研究领域,集成了信号处理、机械设计、
计算机工程、电子工程、自动化控制工程以及人工智能等多学科的研究成果,可 作为机电一体化的最高成就代表之一,是目前科学研究最热门的领域之一[1]。
移动机器人的研究最早可以追溯到上世纪 60 年代末期。在 1966 年至 1972 年中,斯坦福研究院研发出了命名为 shakey 的移动机器人。随着移动机器人周 边技术的急速发展与成熟,其应用范围出现大的拓展,由最先涉及的工业、农业、
医疗、服务等常规行业的应用拓展到了城市安全、国防和空间探测领域等有害危 险的场合中的应用,人们因此可以从重复的体力劳动和危险的工作环境中解放出 来。轮式移动机器人由于其高的灵活性,在工业柔性制造系统、柔性装配系统、
自动化搬运系统和物流仓储系统中成为难以取代的重要部分,使得离散型物流系 统能够更有效地连续化作业,如图 1.1。在军事上,战场上出现了各种先进的无 人侦察机器人、拆弹排爆机器人等类型机器人。美国 Remotec 技术公司设计开发 的自主排爆机器人 ANDROS F6-A 和美国机器人系统技术公司研制的保安机器 人 MDARS-E,可以取代人类进行侦察和爆炸物处理等危险工作,有效减少人员 伤亡,如图 1.2。在民用上,轮式移动机器人在抢险救灾、监控安保、家居服务
图 1.1 工厂全自动搬运机器人 图 1.2 排爆机器人
等场合给予人类的帮助越为重要。在空间探测上,美国移动机器人也走在前列,
其中 2004 年成功登陆火星的“机遇号”和“勇气号”火星车可以作为轮式结构 的典型代表。此外,在医疗上,移动机器人可以帮助人们完成助老助残等任务。
因此,更为广泛的应用及更高的要求促使移动机器人成为全世界研究机构的研究 热点。
机器人在不同领域相对传统人工表现出来的强大优势也吸引了大量的科学 研究者的关注。移动机器人可以以不同的方式进行移动,包括行走、跳跃、滑动 和滚动等等。一般来说,移动机器人采用轮式结构或腿式结构进行移动。腿式结 构可以使机器人跨越凹坑和障碍物,在极端复杂的情况移动,但是腿式机器人结 构复杂,自由度大幅增加[2]。
相对于腿式移动机器人,轮式移动机器人(Wheeled Mobile Robot,WMR)
具有操作快捷、性能稳定、机构和控制相对简单和能量利用效率高等特点,是用 途最广泛的一类机器人[2]。
运动控制是指轮式移动机器人能够在指定的环境中达到一定的运动要求,这 也是移动机器人控制系统的最基本也是最核心的功能。随着应用环境的扩展,要 求机器人的智能化程度越高,能够在充满动态或静态的障碍物环境中正常工作,
同时在特定的任务中达到的运动精度也逐渐提高。这些吸引了大量研究人员从事 运动控制系统的研究工作,主要可分为两方面,一方面是运动学和动力学上的运 动控制,另一方面是在不同环境中的路径规划。
由于含有非完整约束的轮式移动机器人具有运动学模型和动力学模型,它的 运动控制问题包括运动学控制问题和动力学控制问题。根据应用的需要,轮式移 动机器人往往需要在更为复杂的环境下工作,而现实环境中具有很多未知信息,
这将会带来很多的不确定性和复杂性。机器人需要在未知环境下工作,需要有很 好抵抗未知干扰的能力,而相应算法的实现要得到机器人本身处理速度的支持,
因此也给轮式移动机器人的控制系统在抗干扰能力和实时性等方面带来了巨大 的挑战。在运动学方面,轮式移动机器人受到非完整约束的影响,运动控制难度 较大,并且现实实际情况中轮子与地面往往会发生滑动,会造成运动学模型的不 确定性,小的滑动会影响移动机器人的轨迹跟踪精度,大的滑动则可能导致系统 在运动中失稳,所以在运动学的控制律设计方面需要较强的鲁棒性。在动力学方 面,轮式移动机器人是一个多变量、强耦合、参数时变的非线性对象,难以对其 进行高性能位置跟踪的控制。之前,在性能要求高的轮式移动机器人运动系统中,
机器人的运动控制主要采用基于精确模型的反馈控制律方法。在实际应用中,由
浙江大学硕士学位论文 第 1 章 绪论
于测量和建模不精确,加上参数时变和负载扰动等因素的影响,很难获得精确完 备的系统模型,因此轮式移动机器人的轨迹跟踪控制性能的提高受到很大挑战。
路径规划是指规划出一条移动机器人从出发点到终点的与周围环境无碰撞 路径,评价路径的指标往往包括了路程距离、时间和能量等项目,而路程距离是 最重要的一项评价指标。根据环境信息的获取情况,可以分为离线和在线两种路 径规划方法。离线路径规划是指机器人所在环境都是事先已知的,包括障碍物的 位置、大小及移动轨迹。而一般情况下,环境的全部信息是不能都提前已知的,
需要移动机器人在环境运行中不断通过传感器的信息反馈获得,这就是在线路径 规划或局部路径规划[3]。
本文首先针对实际具体的轮式移动机器人平台进行了完整的运动学和动力 学建模,其中动力学模型涵盖了驱动直流电机的电磁力学方程、车轮扭矩传递方 程和车体动力学模型。通过实际的参数辨识对模型进行解耦简化,并在动力学上 先后设计了 µ-synthesis 控制器和自适应鲁棒控制,两者控制器能使具体一定硬件 限制的机器人平台分别在不同工作环境中的控制精度得到大幅度提高,控制性能 得到提升,当然两控制器的具体适合的使用场景有不同侧重。随后,首先通过动 力学上的速度控制实验验证了两者控制器对速度控制精度的提高,然后针对轨迹 跟踪和在含有障碍物环境下的路径规划两个具体应用实例中设计两套控制框架,
分别融合 µ-synthesis 控制器与自适应鲁棒控制器(ARC),体现了控制器在实际 控制环境中的优势。其中在路径规划方面设计了改进的二叉树路径规划算法,该 算法得到的路径由直线和圆弧组成,能够在已知环境下规划出最短路径。上层的 二叉树路径规划算法与底层运动学动力学上的先进控制方法组成了整个轮式移 动机器人控制系统,运动学动力学上的控制方法减少机器人运动误差,保证了上 层路径规划的准确运行,两者相辅相成,为移动机器人运动控制提供了一个提高 精度的整体控制策略。
1.2 国内外研究现状
针对轮式移动机器人这个典型的非完整约束系统,国内外对其运动控制系统 进行了大量的科学研究,并呈现逐步升温状态,尤其在轮式移动机器人的非完整 约束特性下的运动学动力学建模、先进控制策略与路径规划等相关方面。
1.2.1 移动机器人的运动学和动力学建模
轮式移动机器人结构相对于腿式机器人简单,但是其本身作为一个典型的非 完整约束系统,吸引了不少科学家对其建模研究[4-13]。非完整约束对 WMR 运动 学和动力学都有体现,不少学者针对运动学、动力学进行建模研究,也有学者考 虑了模型中不同类型轮子的力学特性及影响[5][7-12]。
早期 Guy Campion 等学者对不同类型 WMR 的运动学和动力学进行了分析[4]。 通过大量的统计,根据轮式移动机器人不同的轮式结构而具有的运动自由度 DOM(Degree of Mobility)和舵性自由度 DOS(Degree of Steeribility)可分为五 大类机器人,以 ( ,
ms
)的形式可分为写为(3,0),(2,0),(2,1),(1,1)和(1,2)类型,其中
m代表的是运动自由度数, s
代表的是舵性自由度,如图 1.3。图 1.3 五类轮式移动机器人结构示意图
Guy Campion 等学者对这五类机器人的运动学进行了运动学的推导,统一可 用公式(1.1)代表,如下:
(z) u
z B
(1.1)其中,z 代表 WMR 的位置自由度,包括
x y , ,
三个平面位姿信息或舵性轮的旋 转角度,用 表示,B (z)
表示与自由度 z 相关的转换矩阵,u
表示控制输入,其 中的 代表的是不同类型移动机器人所具有的移动速度,对应于运动自由度,表示的舵性轮的旋转速度,对应于舵性自由度,具体的五类机器人运动学表达式 可见表 1.1。
(3,0) (2,0) (2,1)
(1,1) (1,2)
浙江大学硕士学位论文 第 1 章 绪论
表 1.1 WMR 的一般运动学模型 类型 位姿坐标 运动学模型
z B (z) u
(3, 0)
x y
1
2
3
cos sin 0 sin cos 0
0 0 1
x y
(2, 0)
x y
1
2
sin 0 cos 0 0 1
x
y
(2,1)
1 c
x y
1
1 1
2
1 1
sin( ) 0 0
cos( ) 0 0
0 1 0
0 0 1
c c
c
x y
(1,1)
3 c
x y
3
1 3
1 3
3
sin sin 0
cos sin 0
cos 0
0 1
c c c c
x L
y L
(1, 2)
1
2 c c
x y
1 2 2 1
1
1 2 2 1
2 1 1
1 2
2
(sin sin( ) sin sin( )) 0 0 (sin cos( ) sin cos( )) 0 0
sin( ) 0 0
0 1 0
0 0 1
c c c c
c c c c
c c
c c
x L
y L
以上的五种类型涵盖住了轮式移动机器人的所有类型,本论文的轮式移动机 器人为上述中的(2,0)类型。
近年来,为了获得 WMR 的更高控制精度,不少研究者不仅仅关注WMR的 运动学模型,同时更加关注 WMR 系统运动学与动力学建模的完整统一性。
Kozłowski K将四轮机器人分为了运动学、动力学和驱动模块,并对每个子系统 单独建模[7]。模型框架如图 1.4 所示。
图 1.4 WMR 模型分解图
这种完整性的建模考虑较为全面,理论推导比较严谨,相对单独只针对车身 动力学建模考虑了驱动系统电力学,但是未考虑到扭矩在驱动轴上的损失。
1.2.2 移动机器人的运动学和动力学控制
针对轮式移动机器人运动学模型上,已有 pure pursuit[14]、神经网络控制[15]、 神经-模糊控制[16]和线性化[17-18]等方法被用来解决跟踪问题。其中 Y. Kanayama 针对机器人运动学中的非完整约束特性提出了一种稳定跟踪控制律[19],将机器人 参考位姿 ( , , )
x y
r r
r 与参考速度 ( ,v w 联系起来,较多地被后面研究者采用,具
c c) 体控制率公式如下:cos
( sin )
r e x e
c
r r y e e
c
v K y
v
w v K x K
w
(1.2)
其中
x y 为车体在世界坐标系中实际位置与参考轨迹的误差,
e, e
e为车体实际转 角与参考轨迹切线的角度误差, ,v w 为车体设定的一个基础速度值, ,
r rv w 为车
c c 体理论速度,K K K
x, y, 为需待选定的三个正参数。最后 Y. Kanayama 用李雅普 诺夫方程证明该控制率的渐进稳定性[19]。此种方法只考虑了机器人的运动学。在动力学上,K. Watanabe、A. Saffiotti 等研究人员针对轮式移动机器人在实 际运行中所处的不确定环境条件和系统具有的模型不确定特性,采用了不同的模
糊控制[20,21]。虽然模糊控制相对易于实现,并且具有一定的鲁棒性,但是模糊控
制有不少缺点:模糊控制缺乏系统理论性,对复杂系统的控制是难以奏效的,并 且模糊控制方程的设计往往需要依赖于个人的设计经验,参数的选择也需要反复 调试。若要进一步提高控制精度就需要增加量化级数,从而导致规则搜索范围扩 大,增加计算负荷,这将大大降低算法的实时性,使其实用性变差。同时滑模控 制不能很好解决模型参数不确定性,并且缺乏定性地解决摩擦力的影响。
自适应控制能够在系统运行中去不断地测量系统的性能、状态或参数,进而 做出改变控制器的结构、参数等决策或根据自适应律来改变控制作用,以保证系 统运行在实时情况下达到优化的控制性能。由于实际轮式移动机器人的动力学是 一个多变量、强耦合、参数时变的非线性对象,各式自适应控制被广泛应用到其
控制中来[22-28]。其中 K. Shojaei 提出了一种直接输入输出线性反馈的自适应控制
方法,他采用了一种 look-ahead 控制方法[29] 解决了非完整约束中不能直接线性
浙江大学硕士学位论文 第 1 章 绪论
图 1.5 直接线性反馈自适应控制框架
反馈的问题,并且针对由建模误差、轮子滑动、表面摩擦力和定位误差造成的系 统不确定性设计一种自适应控制率,控制框架如图 1.5。K. Shojaei 对系统输出量 选取的 look-ahead 控制方法如下:
1 2
( ) ( ), ( )
T Ocos ,
Osin
Ty h x h q h q x L
y L
(1.3) 其中, ( ,x
Oy
O, )
是移动机器人的位置和姿态信息,L 是根据需要选定的长度。对输出 y 其进行双重积分得到:
2f ( ) q f ( ) g f ( ) a
y
L h x
L L h x
L L h x u
(1.4) 假设系统的状态量
q
x
Oy
O
和V
v t
( )w t
( )
(机器人直线速度和角速度)在实时运行中都能测量到,并且它们及它们的微分都是有界的,可选择控制率如 下:
1 2
1 2
1
ˆ ( ) ( ˆ )
( ) ( )
ˆ
a f q f
r r
T
u D x L h L L h
y y y y y
W E
(1.5)
其中 W 是回归矩阵,E1是误差信号向量, 是自适应增益参数,为正定对称矩 阵,
1和
2是对角矩阵,表示线性控制率的微分和比例增益。自适应控制方法虽然有可以自行调整参数的优点,然而在系统有不确定非线 性影响时会造成未知瞬态和失稳可能性,同时 K. Shojaei 并未考虑实际机器人运 行中存在大幅值摩擦力影响的作用。
Backstepping(逐步后推,反推)是一种处理不确定性系统的相对系统化的综合 控制方法,是将 Lyapunov 函数的选取与控制器的设计相结合的一种回归设计方 法。它引入虚拟控制的概念,通过从系统的最低阶次微分方程开始,一步一步设
计满足要求的虚拟控制,最终得出真正的控制律。Backstepping 的控制方法也被 广 泛 运 用 到 移 动 机 器 人 运 动 控 制 上 来[30-32]。 Dongkyuong Chwa 根 据 类 似 Backstepping 反馈线性化的思想设计了一种控制器,这种控制器以机器人运动学 和动力学线性化的级联形式以得到简单模块化的控制结构。首先,从车体位置和 姿态坐标到车体前进直线速度和转向角度的虚指令被设计出来,如式 1.6。然后,
实际扭矩控制输入被设计出来使轮式移动机器人的实际前进直线速度和实际转 向角度追随上级产生的虚指令。由于系统动力学方程可写为
H q z ( ) F q z ( , )
, 所以该级的控制方程如式 1.7。最后一个稳定性分析说明车体跟踪误差(位置和 转向角度)是全局渐进有界的,并且这个有界的范围与选取的控制参数有关。cos( ) sin( )
pseudo c c
pseudo
v X Y
or
(1.6) ( , ) ( )
sin( )
c
c v pseudo c pseudo
F q z H q u u Az z z k v b
(1.7)
反推法技术采用级联的设计思想,但其控制器的结构和设计过程都很复杂,
因此应用到实际中有一定的难度,且缺乏对低频摩擦力与模型参数不确定的考虑。
滑模控制(sliding mode control, SMC) 本质上是一类特殊的非线性控制,控制 的不连续性即为其非线性表现,它可称为变结构控制。滑模模态本身是可以设计 的并且和对象参数及扰动无关,因此具有了快速响应、对应参数变化及扰动不灵 敏、无需系统在线辨识、物理实现简单等优点。由于滑模控制能够克服系统的不 确定性,对干扰和未建模动态具有很强的鲁棒性,特别是对非线性系统的控制具 有不错的控制效果,很多类型的滑模控制也应用到轮式移动机器人的运动控制中
来[33-36]。Ying-Chieh Yeh 针对轮式移动机器人动力学设计了一种自适应模糊滑模
控制器(AFSMDC)。这种控制方法可以有效地减少外部干扰和系统不确定性的 影响以达到好的轨迹跟踪效果,控制框架如图 1.6。
滑模控制方法具有设计过程简便、较好的鲁棒性、快速响应等优点。但是,
在实际中这种方法容易产生震荡的控制信号,这在实际应用中是很危险的[38], 在最近的三年里,国内对轮式移动机器人的轨迹跟踪问题也相继有了很多的 研究。张和胡两学者对轮式移动机器人轨迹跟踪控制的最新研究特点和现状进行
了分析[37,38]。对跟踪轨迹控制方法的研究,有些学者提出了神经网络自适应控制
浙江大学硕士学位论文 第 1 章 绪论
和一种基于迭代学习的移动机器人轨迹跟踪控制方法[39,40];也有学者提出了一些 反演控制方法[41,42];最多研究的轨迹跟踪控制策略是滑模控制,国内近三年提出 了很多针对轮式移动机器人运动学或动力学的滑模控制方法[43-45]。但是国内设计 的控制方法大多数是通过仿真来验证,较少运用到实际系统中去,而且针对的动 力学模型都是大量简化而无相关建模说明,没有同时考虑到实际系统的摩擦力、
模型参数不确定性。
图 1.6 轮式移动机器人的自适应模糊滑模控制框架
1.2.3 移动机器人的路径规划
在机器人路径规划方面,人工势场法[46-50]和网格法[51]是较早被研究并被广泛 使用的两种路径规划方法。两种方法简单直观,在日益复杂的环境下却都有自己 的缺陷。
图 1.7 人工势场法示意图[46]
人工势场法假设目标点给予机器人一个吸引力,吸引力的大小与机器人和目 标点的距离有关,同时周围环境中的障碍物给予机器人排斥力,排斥力与机器人 和障碍物的距离有关,最后通过吸引力和排斥力的矢量合成,得到机器人不同位 置的一个运动方向,最终规划出机器人到达目标点这样一个轨迹图。传统人工势 场法设定吸引势能为:
1
2U ( ) ( , )
att
q 2
q q
goal (1.13) 其中 一个正随机参数,
2( ,q q
goal)(q
goalq
)2表示的是机器人位置 q 与目标点q
goal距离的平方,吸引力即为吸引势能的负梯度:F ( )att
q
U
att( )q
(q
goalq
) (1.14)图 1.8 目标点、障碍物一维示意图
环境中的障碍物对机器人产生的排斥引力可表示为:
0 0
0
1 1 1
( ), ( , )
2 ( , ) U ( )
0 ( , )
obs rep obs
obs
if q q q q q
if q q
(1.15)
其中
为与障碍物位置相关的一个正参数, ( , q q
obs)表示的是机器人与障碍 物的距离,
0表示障碍物与机器人的考虑距离范围,距离小于
0则表示障碍物 对机器人有排斥力。排斥力为排斥势能的负梯度:0
2 0
0
1 1
( )
( , ) F (q)=- U ( ) 1
( , ), ( , ) ( , )
0 ( , )
obs
rep rep
obs obs
obs
obs
q q
q q q if q q
q q
if q q
(1.16)
浙江大学硕士学位论文 第 1 章 绪论
最后通过两者合力得到机器人最终一个牵引力,即机器人当前运动方向,合 力方程为:
rep att rep
F
F
F
(1.17) 考虑到人工势能法存在局部极小点、无法计算紧邻障碍物之间的通道和与障 碍物发生相撞等情况,S.S.Ge 根据机器人与目标点和障碍物两者的相对距离定义 了一种新的排斥力方程[48]。Ahmad A.Masoud 把势能法结合到机器人底层驱动,进一步规划了 WMR 在路径中的速度[49]。之前的势能法针对的都是静态环境,规 划出来的结果也往往是机器人的运动方向,L. Huang 提出了针对目标点和障碍物 运动情况下的人工势场法,能同时规划出机器人的运动方向和速度[50]。
网格法是通过给地图划分网格并按照一定规律赋值,划分方法与车体当前的 位置和目标点位置、车体当前的位置和障碍物位置的两项距离值有关,然后通过 网格的数值大小比较得到前进的方向[51]。
1.3 课题研究意义及研究内容
1.3.1 课题的研究意义
随着轮式移动机器人在工业、农业、医疗、服务、国防和空间探测等众多领 域的应用,所要求运动控制精度也越来越高。一般机器人的运动控制系统包含了 运动学与动力学上的控制两个方面,运动学控制起步较早,已有具有实际应用的 一定研究成果,而在动力学上,未知时变的质量和惯量、摩擦力和控制信号的外 干扰和本身非线性的强耦合特性降低了轮式移动机器人的轨迹跟踪控制精度。在 这之前虽提出了不少控制策略,也在仿真中验证了其控制性能,但是它们有各自 的限制,在实际系统中的应用方法也未具体说明。
此外在路径规划方面上,最常用的两种方法存在各自的局限性。势能法存在 计算路径时往往会有局部势能点,在大障碍物面前无法计算出到达终点的轨迹等 缺点。而网格法对复杂地图划分困难,随着所需精度增加其计算量将剧增,这也 限制了该方法的研究。所以需要一种直观有效的方法用来规划机器人的轨迹。
综上所述,本文将针对 WMR 不同的工作要求在动力学上设计高性能的控制 器,并且根据工作与实验场景设计涵盖运动学、动力学以及更上层的路径规划的
运动控制系统,综合解决实际情况中遇到的各类干扰的影响,达到很高的一个控 制精度,从而适应移动机器人更为广泛的运用。
1.3.2 课题的研究内容
本课题针对轮式移动机器人实验平台的不同工作要求设计了两种控制器,即 µ-synthesis 控制器和自适应鲁棒控制器,并且为 µ-synthesis 控制器跟踪实际黑线 的应用中设计了两层控制框架,为自适应鲁棒控制器在含有障碍物环境中的自主 运行情景中设计了三层控制框架,其中上层部署了改进的二叉树路径规划算法。
主要内容包含以下部分:
第一部分为机器人实验平台的具体搭建工作,其目的为搭建一个最为普遍的 三轮机器人,并且为后续设计的控制系统附加安装相应的传感器,为其控制器提 供所需的速度位置等信号。其中在本实验平台中,通过使用 CCD 摄像头去捕捉 实验室设定的环境特征,如地面黑线轨迹,在通过几何计算得到与实际轨迹的位 姿误差以获得移动机器人在位置和角度上的信息。
第二部分内容为对三轮机器人的一个整体性的建模,该建模涵盖了机器人的 车身动力学和直流电机电磁力学。在完成整体性建模之后,针对不同的参数使用 了不同的辨识方法,有物理测量法、部分最小二乘法辨识和整体最小二乘法辨识,
最后得到带有实际参数的整体模型。
第三部分内容为移动机器人动力学上的控制器设计,在控制器设计之前对已 辨识得到的机器人模型进行相应的分析,了解到由于科氏力和离心力导致的耦合 项在系统中的影响较小,进行忽略并相乘以解耦矩阵进行简化,得到的解耦简化 的模型与实际系统的频域响应情况进行对比,发现在低频存在摩擦力的影响和在 高频有模型参数不确定性的影响。后续设计的 µ-synthesis 控制器在系统能够达到 的频域范围内,兼容性地解决了两个频域段存在问题的影响。
第四部分内容为自适应鲁棒控制器(ARC)的设计,该控制器的设计相对于 上部分 µ-synthesis 控制器性能更侧重于在线的模型参数估计,同时具有快速的瞬 态响应性能。该控制器融合了自适应控制和鲁棒控制的优点,具有很高的控制性 能。其中在避障实验中设计了三层控制框架,涵盖了轮式移动机器人系统的路径 规划、运动学与动力学控制。在最上层使用了改进的二叉树路径规划算法,底层
浙江大学硕士学位论文 第 1 章 绪论
的自适应鲁棒控制保证了算法的实际应用性,各层相辅相成,达到避障路径最短 的效果。
1.4 本章小结
本章以大量国内外文献为基础,分类阐述了轮式移动机器人在动力学与运动 建模、动力学与运动学先进控制策略与路径规划等方面的研究背景及研究现状,
并且结合各类机器人研究的特点并指出不足之处。随后简要说明了本课题的研究 意义,概述了论文的主要研究内容及架构。
第 2 章 机器人平台系统搭建及建模
2.1 实验平台系统
实验平台是课题研究的基础,搭建一个比较正确的完善的科学的实验平台,
才能模拟实际轮式移动机器人运行状况,对其进行后续的建模分析与控制才显得 更有意义。
2.1.1 基本架构及系统连接设计
本课题实验平台的基础架构为 NI 公司开发的 NI Labview Robotics Starter Kit 2.0。该机器人开发包为一个典型的三轮移动机器人,平台包括了易拆卸的硬件 支撑框架、驱动轮及万向支撑轮、双电机驱动器、直流电机、光学编码器和超声 波传感器等,如图 2.1 所示。车体三轮中的前两轮分别由两个直流电机驱动,通 过两轮差速旋转从而带动车体进行相应的直线和旋转运动,第三个轮为万向轮,
起到辅助支撑的作用。三轮中相应的力学特性因此也不同,两驱动轮与地面产生 的静摩擦力给车体是驱动力,而支撑轮上的摩擦力为阻力。
图 2.1 NI Robotics Starter Kit 2.0
该机器人车体上承载的电路硬件是 NI Single Board 9632,采用的是图像化编
程语言 Labview,能够为本课题研究中的算法设计、原型建立和算法验证同时提
供软硬件的支持,如图 2.2 所示。该机器人系统可以建立上位机远程电脑与下位
机 Single Board 9632 的联系,通过便捷的图形化编程可将在上位机的 Labview 程
序直接导入到下位机,利于实际嵌入式系统的开发。在 NI Single Board 9632 硬
浙江大学硕士学位论文 第 2 章 机器人平台系统搭建及建模
件上,集成了实时模块和 FPGA 模块,同时还预留了一些数字和模拟 I/O 接口,
便于系统的扩展。实时模块主要是编写系统的一些较复杂的主程序,而在 FPGA 模块上主要用来采集各传感器信号,并对其简单处理与融合,并且能达到一个较 快的处理速度。
图 2.2 NI Single Board 9632
NI Robotics Starter Kit 2.0 只含光电编码器和超声波传感器,光电编码器一 周线圈数仅为 100CPR,每周脉冲数仅为 400CPR,同时超声波传感器一个循环 周期只能测量一个方向与周围物体的距离值,并且测量精度受周围物体表面质量 影响很大,用来获取机器人的绝对位置误差将很大。可知,机器人平台本身附带 的传感器精度和性能有限。
实时模块
CCD摄像头图像采集卡
惯性传感器
FPGA模块
光学编码器
DC DC电机
双 电机驱动器 电池
图 2.3 平台整体硬件联系图
为了更好地获得车体绝对位置和姿态参数,为后续控制系统的研究开发提供 WMR 位置和速度上的信息,一个
CCD摄像头被安装在车体前端获取一定的环 境图像特征,通过识别已在实验室环境中设定的点与线位置信息并进行反推以便 用来获取轮式移动机器人本身的绝对位姿信息。机器人角速度将会是后面的建模 控制过程中的一个较大耦合量,影响到控制系统的性能,本课题附加了一个六自 由度惯性传感器
ADIS16375用来检测车体的一个实际转角速度,其角速度分辨 率为
0.013108/ s 。系统中各硬件的联系关系如图 2.3 所示。
2.1.2 传感器标定
搭 建 过 程 中 在 已 有 机 器 人 平 台 上 额 外 附 加 了 CCD 摄 像 头 传 感 器 和 ADIS16375 六自由度惯性传感器,其中 ADIS16375 由 ADI 公司提供的标定模板 进行标定,而 CCD 摄像头传感器的内部参数需要自己标定获得。
CCD 摄像机一般都为针口模型,并且采用的摄像机为普通广角,故忽略摄 像头畸变的情况。摄像头模型中,涉及到三个坐标系,即图像坐标系、摄像机坐 标系和世界坐标系。图像坐标系可分为两种,见图 2.4,一种坐标系中坐标是以
O
0O
1v
u
0 0
(u ,v )
Y
X
图 2.4 图像坐标系
像素为单位,而另一种坐标系中是以毫米为单位。摄像机的图像信息都是存储给 像素点的像素值,为了方便与后面世界坐标系的联系,同时建立了以毫米为单位 的坐标系。在以毫米为单位的坐标系中,原点 O1定义在摄像机光轴与图像平面 的交点,一般情况下为图像中心处,设以像素值为单位的坐标系中的每一个像素 在摄像机坐标系中 X 轴与 Y 轴方向上的物理尺寸分别为 dX、dY,则两坐标系 之间的转换关系为:
浙江大学硕士学位论文 第 2 章 机器人平台系统搭建及建模
0
0
u X u
dX v Y v
dY
(2.1)
其中,
(u, v)
为图像坐标系中的像素坐标值,(X,Y)
为图像坐标系中的毫米坐标值。该关系式用齐次方程可表示为:
0
0
1 0
0 1
1 1
0 0 1
dX u
u X
v v Y
dY
(2.2)
同样,两坐标系的逆关系式可表示为:
0
0
0 0
1 0 0 1 1
X dX u dX u
Y dY v dY v
(2.3)
Oc
X
xc Y
yc
zc
f
m
M(x,y,z)
p 图像坐标系
摄像机坐标系
图 2.5 图像坐标系与摄像机坐标系
图像坐标系与摄像机坐标系的关系可见图 2.5,假设 M 点在摄像机坐标值为
(x, y, z)
,该点 M 在图像坐标系中的对应点为m(X, Y)
,图像坐标系与摄像机坐标系的绝对距离为焦距 f,根据图中的比例关系有:
X fx z Y fy
z
(2.4)
使用齐次方程表示图像坐标系与摄像机坐标系的关系如下:
0 0 0 0 0 0 1 0 0 1 0
1 1
x x
X f
y y
s Y f P
z z
(2.5)
其中, s=z,为一比例因子,P 为透视投影矩阵。
摄像机坐标和世界坐标系之间关系为刚性转换,可表示如下:
0 1
1 1
w w
T w
x X
R t
y Y
z Z
(2.6)
结合式 2.3、式 2.5 和式 2.6,得到线性摄像机整体成像模型方程如下,转换 关系图可见图 2.6:
0
0
0
0 1
1 0
0 0 0
0 1 0 0 0
0 1
1 0 0 1 0
0 0 1 1
0 0
0 0
0 1
0 0 1 0
1
w w
T w
w w
w w
T w
u X
u dX f
R t Y
s v v f
Z dY
u X
R t Y
v AM X M X
Z
(2.7)
其中
f
dX
为图像坐标系中 u 轴上尺度因子,或称为 u 轴上归一化焦距;f
dY
为图像坐标系中 v 轴上尺度因子,或称为 v 轴上归一化焦距;M 为 3*4 矩阵,称为投影矩阵;A 由 、
、u 、
0v 决定,只与摄像机内部参数有关,称为内
0 部参数;M1 由摄像机相对于世界坐标系的方位决定,称为外部参数。摄像机的 内部参数往往是未知的,也是接下来需要通过摄像头标定获得的参数。3 4 1
维点矩阵
4 4
世界坐标系 摄像机坐标系
转换矩阵 3 4
摄像机坐标系 物理图像坐标系
转换矩阵 3 3
物理图像坐标系 像素图像坐标系
=
转换矩阵 3 1
2维点矩阵
图 2.6 摄像机坐标转换关系图
摄像机标定的方法有很多,包括摄影测量标定和自标定等等方法,不过传统
浙江大学硕士学位论文 第 2 章 机器人平台系统搭建及建模
的标定方法需要价格贵重的专门标定仪器,本课题采用的是张正友标定法[52],该 方法只需摄像机观察不同方位的 2 维棋牌格子标定板。该标定板的制作也非常简 便,可打印出来一个棋盘格子样板黏贴到一平整平面即可,如图 2.7 所示。
不失一般性,假设在标定环境世界坐标系为 Z=0,并将转换矩阵 R 的第 i 列向量用
r 表示,则等式 2.7 可写为:
i
1 2 3
1 2
1 0 1
1
w
w w
w
u X X
v A r r r t Y A r r t Y
(2.8)
用在世界坐标系中的 M 点来进行分析,不过 Z 坐标值等于零,所以
w w1
TM X Y
,在图像坐标系中用 m 点来表示,有:sm HM
(2.9) 其中H
A r
1r
2t
,s 为一比例因子。定义H h
1h
2h
3
,有:
1 2 3 1 2
h h h A r r t
(2.10) 在等式 2.10 中,由于向量
r
1和
r
2是正交的,有:
1 1
1
(
T)
20
h A
A h
(2.11)
1 1
1 1
1
(
T)
1 2(
T)
2h A
A h
h A
A h
(2.12) 由于整个转换有 8 个自由度,外部参数有 6 个,其中包括 3 个旋转参数和 3 个平移参数。等式 2.11 和 2.12 就是摄像机内部参数的两个约束方程。
为了获得摄像机内外部参数,这里设:
0 0
2 2 2
11 12 13 2
1 1 0 0 0
12 22 23 2 2 2 2 2 2 2
13 23 33 2
0 0 0 0 0 0 0 0
2 2 2 2 2 2 2
1
( )
( ) 1
( ) ( )
1
T
cv u c
B B B
c cv u v
c c
B A A B B B
B B B
cv u c cv u v cv u v
(2.13)
由于 B 是对称矩阵,使用一个 6 维向量可定义如下:
B
11B
12B
22B
13B
23B
33
b (2.14) 令 H 矩阵中第 i 个列向量为 1
1 2 3
T
i i i
h h h h
,有:
T T
i j ij
h Bh = v b (2.15)