行政院國家科學委員會專題研究計畫 期中進度報告
無人遙控潛器操控之虛擬環境模擬與建構(2/3)
計畫類別: 個別型計畫 計畫編號: NSC92-2611-E-110-007- 執行期間: 92 年 08 月 01 日至 93 年 07 月 31 日 執行單位: 國立中山大學海下技術研究所 計畫主持人: 陳信宏 計畫參與人員: 楊宗頜、蕭毓宏、曾宣儒 報告類型: 精簡報告 處理方式: 本計畫可公開查詢中 華 民 國 93 年 5 月 17 日
行政院國家科學委員會專題研究計畫期中進度報告
無人遙控潛器操控之虛擬環境模擬與建構(2/3)
A Simulation Environment for Remotely Operated Vehicles
Operation (2/3)
計畫編號:NSC 92-2611-E-110-007
執行期限:92 年 8 月 1 日至 93 年 7 月 31 日
主持人:陳信宏 國立中山大學海下技術研究所
共同主持人:
計畫參與人員: 楊宗頜 國立中山大學海下技術研究所
蕭毓宏 國立中山大學海下技術研究所
曾宣儒 國立中山大學海下技術研究所
一、中文摘要 本計畫為期三年,主要目的在建立一 套兼具狀態資訊監控與模擬訓練之 ROV 操控介面。第一年期計畫已執行完畢,並 且完成虛擬實境介面顯示軟體、ROV 動態 數學模式、以及 ROV 操控訓練模擬介面 設計。目前正執行第二年期計畫,目的是 整合軟體與感測硬體介面,包括壓力計、 磁羅經、DGPS、水下聲納定位系統、動 力模擬、水下定位、以及虛擬實境介面等 軟體與硬體。在研究進度上已經完成軟體 與硬體之整合,同時也初步完成系統的實 海域性能測試。根據測試結果,本系統已 經可以成功地擷取感測器資料,並將感測 資料顯示於監控畫面上,而且也可以清楚 顯示 ROV 的運動狀態與水下位置,大大 提升了 ROV 的可操控性。此外,在 ROV 操控訓練人機介面的性能測試方面,其結 果也證明本系統可以提供有效的虛擬訓練 環境。所以本系統將有效減輕操作員操控 ROV 的負擔,更可以作為 ROV 操控訓練 之用。特別是台灣飛機失事頻繁,往往需 要利用 ROV 進行殘骸搜尋,此系統將有 助於提升搜尋效率。第三年計畫將延續第 二年的研究成果,進一步測試 ROV 的動 態性能,以增進 ROV 動態模擬的精確性。 關鍵詞:無人遙控潛器、虛擬實境、水下 定位、動態模擬 AbstractThis is a three years project to develop an interface for ROV status monitoring and ROV pilot training. In the first year, we had finished the required software developments including virtual reality, ROV dynamics simulation, and pilot training interface. Currently, the second year project is under running. The project aims to integrate software and hardware to accomplish a simulation environment for ROV operation. The integration includes pressure sensor, gyro compass, DGPS, underwater tracking system, dynamics simulation, underwater positioning, and virtual reality. According to the result of preliminary sea trial, we found this system can successfully receive all sensory data and display them in the monitoring interface. As well, this system provides positioning information of ROV for helping pilots to know where the ROV is. Besides, the pilot training system has been proven to simulate specialist underwater tasks for providing ROV pilot training. Therefore, this system can effectively reduce burden on ROV pilots. The results of this year will be extended to the development of the next year project to enhance the ROV dynamical model for obtaining a more realistic dynamical simulation.
Keywords: ROV, virtual environment,
二、動機與目的 操控無人遙控潛器需要相當多的感測 資訊,例如水深、ROV 航向,ROV 水下 定位、支援工作船的艏向以及 GPS 座標等 等,這些資訊的擷取與呈現方式,對 ROV 的操控效率有很大的影響。例如 1999 年德 基水庫失事直昇機之搜尋[1],操作員只能 依靠經驗以及 ROV 的攝影機所提供的影 像來判斷 ROV 之位置,並下達操作命令。 但是因為水庫底部污泥混濁,使得攝影機 的視野大受影響,而且因為不知道 ROV 的移動軌跡,所以常重複偵測相同的區 域,浪費了許多寶貴的時間及人力。所以 本研究的目的是要發展出一套可以提供狀 態資訊監控的 ROV 操控介面,透過各種 感測資訊的擷取與整合,可以由操控介面 中呈現 ROV 的絕對位置與航向,使操作 員可以完全掌握 ROV 的行蹤;此外,本 系統也必須兼具任務模擬訓練的功能,可 以在精細的 ROV 動態模擬下,提供操作 員一個便利舒適的訓練環境。 為了能夠掌握 ROV 在水下的位置, 必須整合許多感測資訊,包括 ROV 深度、 船艏向、船的定位、ROV 航向、以及 ROV 定位。這些資訊的呈現可以單純的由數字 來表示,但對於輔助操作員掌握 ROV 的 位置與動態特性並沒有太大的幫助,特別 是對於實際操作經驗不足的 ROV 操作 員,更是難以將大串數據資料直接轉換為 ROV 的三度空間位置。事實上,人類對於 圖像的理解能力比對文字的理解能力更快 更直覺,所以如果可以將感測器數據資料 整合之後直接以圖像方式呈現,將有助於 ROV 操作員理解與掌握 ROV 的位置資 訊。此外,在操控 ROV 的過程中,ROV 的位置資訊隨時在改變,所以 ROV 的位 置也最好能夠以動態圖像的方式來呈現。 因此,如何發展一套能夠逼真地動態顯示 ROV 與周遭作業環境相對位置關係的狀 態顯示與監控介面,是本計畫的發展目標 之一。 此外,大部分的 ROV 操作員,都是 藉由長時間的實務演練才得以熟稔儀器的 操作與 ROV 的控制,但是 ROV 的實務操 作經驗取得必須經由實際水域操作來累 積,受限於實地操練所需的時間、空間、 大量花費、後勤支援、以及丟失貴重 ROV 的風險,大部分的操控經驗都是從工作中 累積得來的(On the job),所以具備一套 安全、有效率、又節省成本的 ROV 操作 訓練系統是有其必要性的。所以本計畫另 一個目標就是要發展一套 ROV 操控訓練 介面,可以快速增進 ROV 操作員的操控 技術與經驗累積。 三、相關文獻 為了達成以動態圖像呈現 ROV 感測 資訊,本計畫以虛擬實境相關技術來建構 ROV 的狀態顯示與監控介面。虛擬實境在 海洋工程領域的相關應用雖然不多,但近 年已有逐漸增加的趨勢,例如在近海工業 上利用虛擬場景的模擬與相關儀器的配合 來進行水下作業 [2, 3],以改善儀器操作 人員對時間和空間的感知能力,同時也可 以節省成本與避免不必要的危險發生。除 此之外,虛擬實境在自主式潛器 AUV 的 系統發展與模擬上也扮演相當重要的角 色,主要用途是為了能快速診斷 AUV 複 雜系統的錯誤,同時提高系統的強健性, 所以當前虛擬實境在水下技術的相關應用 上,大部分集中於 AUV 系統整合與軟體 發展為主 [4-10]。不過由於 AUV 與 ROV 的操控特性畢竟不一樣,所以這些應用於 AUV 的人機介面發展較著重於跨平台、以 及展示 AUV 在空間中的動態模擬,不像 ROV 與操作者之間有相當密切的互動,所 以上述這些 AUV 虛擬測試系統在人機互 性動上的研究則著墨甚少。 在 ROV 操控訓練相關研究方面,1995 年 Kuroda 等人於研究室中架構了一個虛 擬的水下環境,用來測試 Twin-Burger 的 效能[11]。1997 年,Pioch 等人利用 Open Inventor 來架構虛擬實境,為 ROV Talon 開發了一套操控訓練系統[12]。此外, Wang 等人在 2000 年也利用 LabVIEW 建 構了一套水下載具的操作訓練和控制系統 [13],強調其具有力量回饋控制功能,並
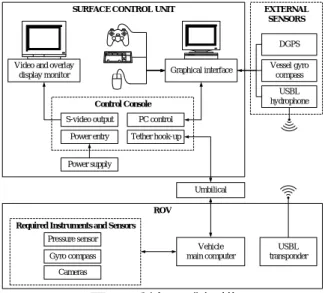
藉由動力回饋搖桿來模擬操作水下載具碰 撞障礙物時所產生的震動效果,不過此系 統的最大缺點是沒有計算水下載具的動態 模式,所以無法確實呈現水下載具被操作 時的動態行為。要結合虛擬實境發展 ROV 的操控訓練介面,就必須能逼真模擬 ROV 的動態特性。ROV 動態特性的研究,可以 從許多文獻找到相關資料[14-15],不過最 常被引用的還是 Fossen 所發展出來的動 態數學模式[16]。為了更進一步描述 ROV 操縱過程中與障礙物碰撞的反應,也有相 關研究可供參考[17],這也是本計畫欲達 成的目標之一。 四、研究成果 經過第一年計畫的發展之後,本研究 已經建立了 ROV 監控與訓練介面軟體發 展,包括 ROV 操控之虛擬實境介面顯示 軟體、ROV 動態數學模式、以及 ROV 操 控訓練模擬介面設計。第二年的計畫目標 則是將第一年發展的軟體與感測硬體結 合,並進行初步測試。至目前為止,已經 完成修正系統整合架構、實海域系統測 試、感測資料重播介面設計、以及操控訓 練介面性能測試。以下就各項完成之相關 成果一一做介紹。 (一)硬體系統整合架構 本計畫第二年主要目標之一是整合監 控訓練介面軟體與感測硬體,所以必須先 確定各感測硬體的資料輸出格式。本系統 發展之硬體架構如圖 1 所示,使用之硬體 包含 ROV、水面控制單元、以及外部定位 感測器。ROV 上配備 CCD 攝影機,可以 提供水下動態影像畫面,ROV 上也配備壓 力計和磁羅經,提供 ROV 作業水深與航 向等資訊。水面控制單元包含 ROV 控制 台、電源供應器、視訊監視器、以及圖形 顯示介面。ROV 控制台上有各種形式的開 關與搖桿可以控制 ROV 的燈光、攝影機、 推進器出力等功能,也有感測器傳輸介面 可以輸出 ROV 狀態資料與輸入 ROV 控制 命令。視訊監視器可以顯示 ROV 拍攝的 水下影像畫面,同時將深度與航向資訊重 疊於影像上。圖形顯示介面利用 RS232 介 面接收水面控制台傳送出來的 ROV 感測 資訊,包括 ROV 深度、航向、俯仰角 (Pitch)、以及橫搖角(Roll)等,圖形顯示主 控電腦將這些感測資訊整合之後顯示於虛 擬實境顯示介面上。但是光靠 ROV 深度、 航向、俯仰角、以及橫搖角等資訊並不足 以進行 ROV 定位,還必須結合外部感測 器的資訊。外部感測器包含全球衛星定位 系統(DGPS)、磁羅經、以及超短基線水下 定位系統。全球衛星定位系統可以定位出 工作船的位置,磁羅經用於提供工作船的 艏向,超短基線水下定位系統則提供 ROV 相對於工作船的位置資訊,這些感測資訊 也是藉由 RS232 通訊協定傳至圖形顯示主 控電腦。圖形顯示主控電腦將 ROV 上傳 的感測資訊與外部感測資訊整合之後,便 可以估算出 ROV 的水下位置,並以 3D 和 2D 的虛擬實境與圖示顯示於 ROV 監控圖 形介面上。 (二)軟體系統整合架構 本研究所發展的軟體架構如圖 2 所 示,其包含感測資料融合、動態模擬、以 及圖形顯像三個不同處理程序。感測資料 融合與動態模擬皆提供資料輸入的接收 點,只不過感測資料融合是接收實際感測 器資料,動態模擬則是接收搖桿的資訊, 圖形顯像則是接收從感測資料融合與動態 模擬程序輸出的導航資訊。感測資料融合
Video and overlay
display monitor Graphical interface
Power supply
Umbilical
Vehicle main computer Power entry Tether hook-up
S-video output PC control
Control Console DGPS Vessel gyro compass USBL hydrophone
SURFACE CONTROL UNIT
Pressure sensor Gyro compass Cameras
USBL transponder
Required Instruments and Sensors ROV
EXTERNAL SENSORS
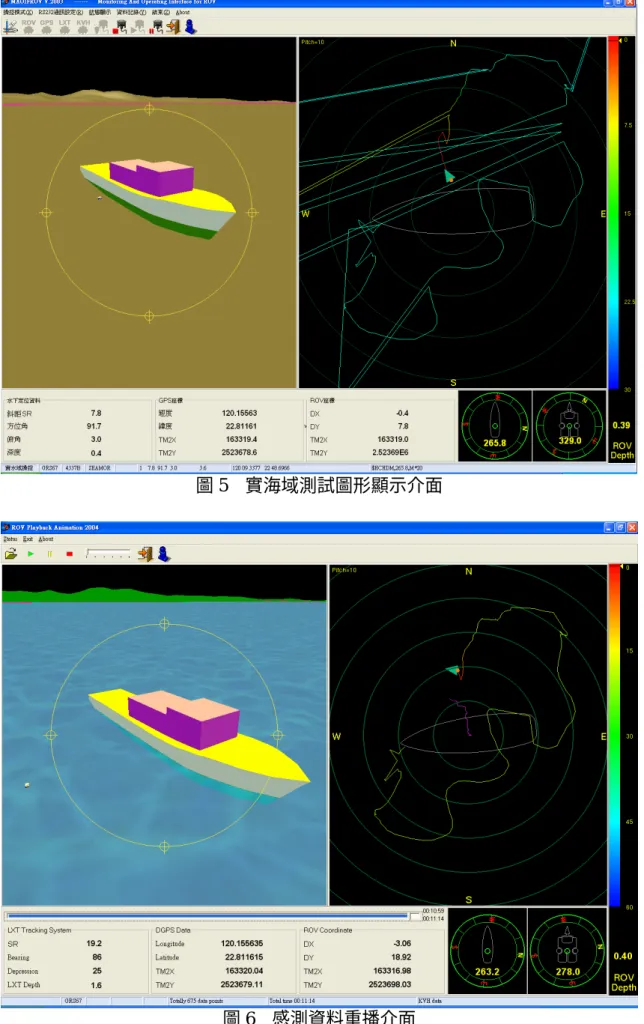
由 RS232 接收感測資料後,先進行資料抽 取,獲得有意義的感測資料之後再將之進 行融合,得到較為可信的 ROV 定位資料。 ROV 定位資料傳送至圖形顯像處理程序 時,圖形顯像處理程序一方面將 ROV 定 位資料儲存於資料庫與,另一方面則利用 接收的資訊來更新導航資料,一旦導航資 訊更新之後,3D 與 2D 圖形場景也會隨之 更新。而資料庫內所儲存之 ROV 定位資 料,還可以用於事後播放 ROV 整個運動 程序,瞭解 ROV 在任一時刻的運動狀態。 至於動態模擬程序則是利用 DirectX API 來處理搖桿輸入的操控資訊,透過動態模 擬將搖桿送出的推進器推力大小換算為 ROV 的動態位置,再將 ROV 動態位置傳 入圖形顯像處理程序,以進行 ROV 導航 資訊更新。同時,動態模擬程序中也隨時 計算 ROV 與場景中障礙物的相對位置關 係,以偵測 ROV 是否與其他障礙物發生 碰撞,一旦碰撞發生,ROV 動態模式會計 算出碰撞反作用力的大小,再將反作用力 轉換為力回饋搖桿的震動輸出,提醒操作 者碰撞狀況的發生。 (三)實海域測試 第二年計畫的主要目標之一,是要整 合 ROV 狀態監控軟體與硬體介面。為了 測試整合後的運作效果,本計畫以 ROV 狀態監控軟體與硬體整合介面進行實海域 初步性能測試。 測試最主要的目的是檢驗本系統是否 可以成功顯示 ROV 狀態與定位資訊,其 定位實驗量測方法如圖 3 所示,測試地點 在高雄永安外海,GRS67 座標位置為東經 120.155582 度、北緯 22.811712 度(圖 4)。 船下錨後,將水下麥克風固定於船底,而 應答器裝載於 ROV 上,在 ROV 航行過程 中,分別量測斜距、方向角、以及俯角。 藉由這些資訊可以求得 ROV 相對於工作 船的位置,再經由工作船的 GPS 座標和艏 向,就可以求得 ROV 在水下的絕對位置, 測試顯示介面如圖 5 所示,因為定位訊號 誤差,造成 ROV 軌跡有些地方產生劇烈 跳動,但並不影響整體介面性能。 圖 2 系統軟體架構 H orizo ntal R an ge (H r) 圖 3 ROV 定位量測 圖 4 實海域測試地點 (四)感測資料重播介面設計 當實海域操控 ROV 作業過後,有時 必須重新檢視當時的作業過程,所以必須 有一套可以重播當時作業狀況的系統。所 以本計畫也據此發展出一套 ROV 感測資 料重播介面,如圖 6 所示。這套感測資料 重播介面包含功能表、3D 顯示、2D 顯示、
圖 5 實海域測試圖形顯示介面
以及感測數據資料顯示。在功能表中可以 開啟任一航次之感測儲存資料,重播介面 會自動計算資料長度(ROV 作業時間), 同時也具有播放、暫停、終止等按鍵,可 以調整播放速度。3D 顯示功能則用於顯示 工作船與 ROV 之間的相對位置關係,可 以透過滑鼠來旋轉和平移顯示畫面以變更 視角,藉由不同的角度來觀測工作船與 ROV,同時也可以利用滑鼠控制畫面的縮 放,以調整到最合適的觀測畫面。2D 顯示 功能也是用於顯示工作船與 ROV 之間的 相對位置關係,但僅限於 XY 平面,不過 在 2D 畫面中可以顯示 ROV 和工作船的運 動軌跡,同時以不同顏色來代表 ROV 的 深度,讓操作者可以很清楚瞭解 ROV 經 過的區域與其運動方向。此外,在 2D 顯 示功能也可以透過滑鼠來平移顯示畫面以 變更視角,同時也可以利用滑鼠控制畫面 的縮放,以調整到最合適的觀測畫面。感 測數據資料顯示則是顯示當時的 ROV 航 向、船艏向、ROV 座標位置、工作船 GPS 座標位置、以及水下定位系統的數據資料。 (五)操控訓練 ROV操控訓練介面包含了ROV資料 庫、地形資料庫、環境資料庫、以及障礙 物資料庫,其系統介面如圖7所示。其與 ROV狀態監控顯示介面的不同的是,在 ROV虛擬實境顯示介面中,ROV的位置是 由整合GPS、水下聲納定位系統、磁羅經 以及深度計之資料所決定,而在ROV操控 訓練介面中,ROV的位置則是利用動態數 學模式建構出來的,使用者可以透過搖桿 來操控ROV的運動,藉由改變搖桿的操作 位置以及其他按鈕來模擬推進器的推力大 小,例如根據表1所設定的ROV推力與轉 動扭矩大小,可以估算出ROV速度與角速 度(圖8),也可以計算出ROV的運動軌 跡(圖9)。此外,操控訓練系統中內含的 ROV資料庫、環境資料庫、地形資料庫、 以及結構物資料庫,可以讓使用者透過鍵 盤和滑鼠來變更水下作業環境模擬狀況, 圖7 ROV操控訓練介面 表1 ROV外部推力 作用力 推力與力矩 X軸方向推力 60N Y軸方向推力 30N Z軸方向推力 0N X軸轉動力矩 0Nm Y軸轉動力矩 -10Nm Z軸轉動力矩 10Nm 圖8 線速度與角速度曲線圖 圖9 ROV軌跡圖
包括選擇操控訓練場景、更換海底地形與 材質、更換障礙物貼圖與材質、調整水下 能見度、調整水下環境照度、調整ROV動 力參數、選擇打開或關閉ROV的照明燈 光、建構水下環境等功能。目前正針對所 發 展 的 ROV 操 控 訓 練 系 統 進 行 性 能 測 試,測試的主要任務包括以下三項: 1. ROV 移動操控 此任務之目的是讓操作者熟悉ROV之 移動控制,同時藉此訓練使用者如何將 ROV控制在定點而不會隨便移動。測試 系統於場景中建立四個簡單的幾何目標 物,目標物的大小為一至三公尺不等, 分布範圍約100公尺見方。每一幾何目標 物上都有一明顯的粉紅色正方形區塊供 使用者定位。在此測試中,當操控者搜 尋到目標物後,利用ROV的攝影機畫面 上之方框來定位目標物,定位標準為攝 影機畫面上之方框完全處於目標物的粉 紅色正方形區域內,並且持續停留五秒 鐘以上即代表定位完成。 2. 管線追蹤 此任務之目的在於訓練操作者沿著指定 管線移動,以找出管線之異常之處。本 測試系統於場景中建立土黃色之圓形管 線,其直徑約為一米,而長度約三百二 十五米,彎曲半徑最小為二十八米,最 大則為五十六米。測試人員操控的 ROV 需沿著管線前進才不容易迷失路徑。於 管線上某個段落將有一粉紅色正方形方 塊,體積為一公尺立方,代表該處管線 有異常狀態,操控者須操控 ROV 找到 該粉紅色方塊,並利用攝影機畫面之方 框完成定位。 3. 目標物搜索 此任務之目的在於利用本系統ROV移 動軌跡顯示功能,幫助操作者提昇搜尋 目標物的效率。本項測試於預設之海底 地圖中隱藏三個物體,此海底搜尋區域 範圍為700公尺見方,最高點與最低點的 差距為60公尺。測試人員須操控ROV於 場景中搜尋到此目標物,並完成定位, 而且操作者可利用ROV之移動軌跡來 輔助檢視該區域搜索狀況。 五、結論 本研究計畫第二年的工作目標是整 合狀態資訊監控與模擬訓練之 ROV 操控 介面軟體與感測硬體,包括壓力計、磁羅 經、DGPS、水下聲納定位系統、動力模 擬、水下定位、以及虛擬實境介面等軟體 與硬體,本計畫執行迄今已達成上述工作 目標。綜合言之,本計畫進行開發之 ROV 虛擬環境操控介面已經成功整合軟體介面 發展與硬體整合,同時經過實海域操控與 定位測試,證實本系統確實可以正常運 作,不僅軟體介面可以與感測硬體完全整 合,而且完整的 3D 虛擬介面與 2D 圖形顯 示介面確實有助於操作員確實掌握 ROV 的動態。此外,本計畫發展的感測資料重 播介面與狀態資訊介面相似,透過它可以 重新檢視當時 ROV 的完整作業過程,對 於事後的作業檢討、任務重新檢視都有很 大的幫助。而在操控訓練模擬方面,系統 中內含的多樣的資料庫,可以讓使用者輕 易變更水下作業環境模擬狀況,而目前則 正針對所設定的「移動操控」、「管線追 蹤」、「目標物搜索」三種不同訓練任務 進行性能測試,以瞭解操作員在不同輔助 條件下的作業效率。 八、參考文獻 [1] 薛憲文、莫顯蕎、王兆璋、陳信宏、楊光哲, 多音束測深系統及水下遙控載具與水下搜尋 技術之探討-以德基水庫失事 AH-1W 直昇 機為例,海下技術季刊,第九卷第三期,7-14 頁,1999 年。
[2] X. Wang, G. Seet, M. Lau, E. Low, and K. C. Tan, “Exploiting Force Feedback in Pilot Training and Control of an Underwater Robotics Vehicle: an Implementation in LabVIEW,” OCEANS 2000 MTS/IEEE Conference and Exhibition, 11-14 Sept. 2000,
Providence, RI, USA, Vol. 3, pp. 2037-2042, 2000.
[3] P. Chapman, P. Stevens, D. Wills, and G. Brookes, “Real-Time Visualization in the offshore Industry,” IEEE Computer Graphics
and Applications, Vol. 21, No. 4, pp. 6-10,
2001.
[4] D. Brutzman, “Virtual World Visualization for an Autonomous Underwater Vehicle,”
OCEANS ’95 Conference Proceedings, 9-12
Oct. 1995, San Diego, CA, USA, Vol. 3, pp. 1592-1600, 1995.
[5] D. Gracanin, K. P. Valavanis, N. C. Tsourveloudis, and M. Matijasevic, “Virtual-Environment -Based Navigation and Control of Underwater Vehicles,” IEEE
Robotics and Automation Magazine, Vol. 6, No.
2, pp. 53-62, June 1999.
[6] Y. Pang, Y. Shang, and Y. Xu, “Software Design Techniques for the Man-Machine Interface to Autonomous Underwater Vehicles,” Proceedings of the 1998 International Symposium on Underwater Technology, 15-17 April 1998, Tokyo, Japan,
pp. 370-374, 1998.
[7] S. K. Choi, S. A. Menor, and J. Yuh, “Distributed Virtual Environment Collaborative Simulator for Underwater Robots,”
Proceedings of the 2000 IEEE/RSJ international Conference on Intelligent Robots and Systems, 31 Oct.-5 Nov. 2000, Takamatsu,
Japan, Vol. 2, pp. 861-866, 2000.
[8] S. K. Choi and J. Yuh, “A Virtual Collaborative World Simulator for Underwater Robots Using Multi-Dimensional Synthetic Environment,”
Proceedings of the 2001 IEEE International Conference on Robotics and Automation, 21-16
May 2001, Seoul, South Korea, Vol. 1, pp. 926-931, 2001.
[9] P. Ridao, J. Batlle, J. Amat, and M. Carreras, “A Distributed Environment for Virtual and/or Experiments for Underwater Robots,”
Proceedings of the 2001 IEEE International Conference on Robotics and Automation, 21-16
May 2001, Seoul, South Korea, pp. 3250-3255, 2001.
[10] C. Deltheil, L. Didier, E. Hospital, and D. P. Brutzman, “Simulating an Optical Guidance
System for the Recovery of AN unmanned Underwater Vehicle,” IEEE Journal of Oceanic
Engineering, Vol. 25, No. 4, pp. 568-574,
October 2000.
[11] Y. Kuroda, K. Aramaki, T. Fujii, and T. Ura, “A Hybrid Environment for the Development of Underwater Mechatronic Systems,”
Proceedings of the 1995 IEEE IECON, International Conference on Industrial Electronics, Control, and Instrumentation, 6-10
Nov. 1995, Orlando, FL, USA, Vol. 1, pp. 173-178, 1995.
[12] N. J. Pioch, B. Roberts, and D. Zeltzer, “A Virtual Environment for Learning to Pilot Remotely Operated Vechicles,” Proceedings of
the VSMM ’97, International Conference on Virtual System and Multimedia, 10-12 Sept.
1997, Geneva, Switzerland, pp. 218-226, 1997. [13] X. Wang, G. Seet, M. Lau, E. Low, and K. C. Tan, “Exploiting Force Feedback in Pilot Training and Control of an Underwater Robotics Vehicle: an Implementation in LabVIEW,” OCEANS 2000 MTS/IEEE Conference and Exhibition, 11-14 Sept. 2000,
Providence, RI, USA, Vol. 3, pp. 2037-2042, 2000.
[14] Newman, J. N., Marine hydrodynamics, 4th ed., MIT Press, Cambridge, MA, 1984.
[15] F. R. Driscoll, R. G. Lueck, and M. Nahon, “Development and validation of a lumped-mass dynamics model of a deep-sea ROV system,”
Applied Ocean Research Vol. 22, pp. 169-182,
2000.
[16] T. I. Fossen, Guidance and Control of Ocean
Vehicles, John Wiley & Sons, Chichester, 1994.
[17] P. Jiménez, F. Thomas, and C. Torras, “3D collision detection: a survey,” Computers &
Graphics, Vol. 25, No. 2, pp. 269-285, 2001.
誌謝
本研究承行政院國家科學委員會之經費贊 助 (NSC92-2611-E-110-007) 得 以 順 利 進 行,僅此致謝。