©2007 National Kaohsiung University of Applied Sciences, ISSN 1813-3851
市電併聯型氣輪發電系統動態特性分析
市電併聯型氣輪發電系統動態特性分析
市電併聯型氣輪發電系統動態特性分析
市電併聯型氣輪發電系統動態特性分析
蘇博甫 蘇博甫 蘇博甫 蘇博甫*、、、陳盟仁、陳盟仁陳盟仁*、陳盟仁 、、林堉仁、林堉仁林堉仁**、林堉仁 、柴、、柴柴 樺柴 樺樺***、樺 、、張銘津、張銘津張銘津* 張銘津 *國立高雄應用科技大學電機工程系 **義守大學電機系 ***昱奕科技股份有限公司 E-mail: [email protected]摘
摘
摘
摘 要
要
要
要
本論文主要在探討氣輪發電系統在與市電併聯情況下正常和故障運轉的動態特性。研究 對象為一個與市電併聯的氣輪發電系統。此架構主要的系統組件包括市電系統、氣輪發電系 統、變壓器、感應電動機、以及靜態負載等。研究範圍除了系統組件的數學模型推導外,也 包含了相對應的 SimPowerSystems 模組開發以及進一步的動態特性模擬分析。為了讓模擬與 實際情形更接近,模擬了四種運轉模式。模擬結果顯示,在這些運轉模式下,系統的動態特 性都是可以接受的,並且可預期的應可和實際應用情形接近。本研究最大的價值是可做為氣 輪發電系統規劃、運轉、以及系統擴充的重要參考。 關鍵詞 關鍵詞 關鍵詞 關鍵詞::::氣輪發電系統氣輪發電系統氣輪發電系統、氣輪發電系統、、動態特性分析、動態特性分析動態特性分析動態特性分析、、變壓器、、變壓器變壓器、變壓器、、、同步發電機同步發電機、同步發電機同步發電機、、、SimPowerSystems。。。。1. 前
前
前 言
前
言
言
言
由於世界各國工業發達,導致全球二氧化碳濃度較「工業革命」之前更為嚴重,若不採 取任何防治措施,大量的溫室氣體產生,將造成地球氣溫的上升及海平面的升高。許多科學 家不斷提出警告-氣候暖化可能造成毀滅性災難。為防止溫室效應導致之災厄,聯合國遂於 1992 年通過「氣候變化綱要公約」,隨後在 1997 年於日本京都召開防止全球氣候暖化國際會 議,與會各國政府在會中提出京都議定書,以約束各工業化國家的二氧化碳排放量,希望能 以 1990 年為標準,在 2008 年至 2012 年的 5 年內,降低包括二氧化碳在內的六種溫室氣體 5.2%的排放量。根據聯合國表示,目前已簽署這項協定的國家已超過 140 個[1-2]。 天然氣是潔淨的高效能燃料,因為天然氣主要成份係甲烷,並含有些許乙烷、丙烷、丁 烷等成分,以及少量不燃性氣體的氣態碳氫化合物,其熱值約為每立方公尺 8,900 千卡至 9,900 千卡。此外,天然氣的熱效率高,排放的污染物又較其他燃料少,因此以天然氣為燃料來發電是公認火力發電中最乾淨的能源。目前天然氣發電的技術已相當成熟。鄰近的日本及韓國 已有相當大規模的天然氣發電廠進入商業運轉[3]。 由於燃氣發電與其他化石燃料比較,具有環保優勢,加以建廠的前置時間短且具有彈性 調度能力,在天然氣供應充足及發電效率持續提升的情況下,目前各國對天然氣發電的依賴 日深。預期至 2025 年時,全球天然氣發電佔比,將較目前增加約 2.5 倍。就地區而言,前蘇 聯地區的天然氣發電佔比預期將由目前的 42%提高為 2025 年時的 63%;東歐地區則預期由 目前的 9%提高為 2025 年的 50%;在北美地區,美國預期將由目前的 18%提高為 2025 年的 24%,加拿大預期將由目前的 3%提高為 2025 年的 11%;在西歐地區,由於核能及燃煤發電 比例逐年下降,天然氣發電佔比預期將由目前的 17%提高為 2025 年的 38%;中南美洲方面, 天然氣發電佔比預期將由目前的 9%提高為 2025 年的 46%[4]。 基於天然氣高效能、無污染而且安全方便的特性,在「能源多元化」的政策目標下,中 油公司自 1990 年完成國內首座位於高雄縣永安鄉之液化天然氣接收站,開啟國內清潔能源 LNG 供應新頁以來,隨著國內經濟快速成長,對能源需求逐年遞增,隨著國內民眾對環境品 質的要求日益嚴格,未來天然氣需求勢將持續成長,尤其發電用天然氣更將穩定增加。 2003 年,中油公司進口液化天然氣總量達 557 萬噸,提供國內發電使用佔 78.75%。近期台電大潭 電廠預定 2008 年完成六台複循環燃氣機組 438.4 萬瓩的發電容量[5]。 由於氣輪機的輸送安裝時間較短而且啟動快速,不像蒸汽動力廠的設置、啟動需要較長 時間,因此非常適合在尖峰負荷時供應電力,也極適合用於緊急狀況下的電力支援例如電廠 電力設備損壞、電力輸送線中斷、或水力發電廠無法操作供電時。目前航空類型的氣輪機已 經被廣泛地作為發電機的原動機,此類型氣輪機完全自動的起動能力和快速起動運轉的特 性,除了作為電力系統的基載外,更適用於尖峰負荷和備用的電源。就大小尺寸,重量和對 大範圍燃料(從天然氣到原油或殘餘油)的適應性而論,氣輪發電機是優於其他形式的發電 機。此外,近代離岸石油工業的鑚油平台,相當多數量的氣輪發電機組被安裝在石油天然氣 的生產平台上,因平台上電力負載的增加,使得氣輪發電機的容量逐漸地增加,此離岸的鑚 油平台通常是獨立型發電的電力系統,為提供系統的穩定運轉,有關氣輪發電機組和其他組 件的設計規劃、操作運轉方面值得深入探討。 本論文主要在探討氣輪發電系統在獨立運轉以及與市電併聯運轉時正常和故障情況下的 動態特性。研究對象有二個,其中一個是獨立型氣輪發電系統架構,另一個是氣輪發電系統 與市電併聯的架構。這兩種架構主要的系統組件包括氣輪發電系統、變壓器、感應電動機、 以 及 靜 態 負 載 等 。 研 究 範 圍 除 了 系 統 組 件 的 數 學 模 型 推 導 外 , 也 包 含 了 相 對 應 的 SimPowerSystems 模組開發以及進一步的動態特性模擬分析。研究的程序是先確認系統架構, 接著確定要觀察的系統變數並且整理系統組件的參數,然後規劃模擬項目、開發模組、以及 進行模擬,最後整理模擬結果並且加以評論。此外,為了讓模擬與實際情形更接近,在獨立
型氣輪發電系統方面,模擬了四種運轉模式,在氣輪發電系統與市電併聯方面,也模擬了四 種運轉模式。本研究最大的價值是可做為氣輪發電系統規劃、運轉、以及系統擴充的重要參 考。 有關氣輪發電的研究很多,然而針對獨立型氣輪發電系統以及氣輪發電系統與市電併聯 的動態特性的研究卻相當有限。氣輪發電相關的文獻,除了一些書籍針對氣輪發電系統的原 理及組件有廣泛的介紹外,許多研究論文也對氣輪發電系統的各個領域做深入的探討。 首先,在氣輪發電系統的穩定度方面,Hung 提出因故障導致的系統擾動或負載的波動引 起發電系統的不穩定,進行研究系統的響應和改進相關的控制系統,開發準確的系統模組 [6]。Doughty 等人提出氣輪機在汽電共生廠電力的研究,該研究主要包括系統組件的模組、 負載潮流與短路、穩定度、以及模擬在低電壓與頻率降低狀況下的動態特性[7]。Bagnasco 等 人提出複循環發電廠的動態特性分析,主要著重於氣輪原動機的模組架構,包括調速控制、 溫度控制和渦輪葉控制等利用軟體來進行模擬,探究其系統的穩定度[8]。Sharma 把獨立的小 型發電系統模組化來研究其動態特性[9]。Paine 針對以氣輪發電為主的複循環系統的操作運轉 提出許多重要的技術探討[10]。Shilling 針對獨立發電系統的大容量負載在低頻下電力暫態穩 定度做特性分析[11]。 其次,在氣輪原動機的模組方面,Hajagos 等人提出氣輪原動機的完整模組架構及詳細的 各項參數的設定,以類比電子調速控制與數位電子調速控制分別進行實際模擬驗證分析 [12]。Chiras 等人闡述利用 NARMAX 模組架構的非線性氣輪機,以時域和頻域分析進行驗證 [13]。Nagpal 等人利用氣輪機模組的試驗與驗證,來呈現氣輪機的調速系統的動態特性[14]。 Hannett 等人提出氣輪機模組利用實驗模擬加以驗證[15]。Maslo 等人針對各種原動機模組進 行分析[16]。Evans 等人利用頻域技術驗證氣輪機模組的特性[17]。Nern 等人對於氣輪發電廠 的模組作長時期的模擬研究其動態特性[18]。 此外,在氣輪發電系統的應用研究方面,Jurado 等人提出適用於燃料電池與微輪機混合 系統的控制研究[19]。Steinfeld 等人提出高效率的碳酸鹽燃料電池與氣輪機混合系統[20]。 Hamilton 指出燃料電池與微輪機混合系統是未來的主流,文中驗證固態氧燃料電池(SOFC) 與微輪機(MTG)混合系統的參數評估,主要包括輸出功率、發電效率、衰變特性、可行性 和執行功率範圍、以及低污染物[21]。Berta 等人利用蒸汽注入燃燒室,混合天然氣的特殊氣 輪機組[22]。Kakimoto 等人使用複循環發電廠的模組,模擬在頻率變動時的動態特性分析 [23-24]。Rowen 提出大容量氣輪機組與複循環系統的電廠,在不同條件(尖峰負載能力、低 頻運轉極限、低頻發電能力、系統頻率與氣輪機轉速之關係)下的動態特性分析[25]。Smith 提出利用高效率飛機用的氣輪機作為發電的研究[26]。Kayukawa 提出四種不同型式的 MHD 複循環發電系統,分析研究比較其動態特性[27]。Archer 等人使用燃料電池與氣輪機混合發 電系統[28]。Ekstrom 分別闡述複循環發電系統量測的可靠性及有效利用率[29]。Zimmermann
等人針對新竹科學園區薪宇公司的汽電共生發電,探究其暫態穩定度的動態特性[30]。Aguero 等人針對複循環系統的模組開發利用實驗加以驗證,也模擬在嚴重擾動下該系統的動態特性 來驗證其可靠度[31]。Lasseter 也對微輪機與燃料電池的模組進行動態特性分析[32]。另外, 在其他領域方面,Kim 等人對氣輪發電廠的控制上使用增值型的模糊控制設計,利用適當的 基因演算法達到最佳化的增益,比傳統的 PI 控制得到更好的改善[33]。 本論文主要在探討氣輪發電系統在與市電併聯情況下正常和故障運轉的動態特性。研究 範圍除了系統組件的數學模型推導外,也包含了相對應的 SimPowerSystems 模組開發以及進 一步的動態特性模擬分析。模擬結果顯示,在這些運轉模式下,系統的動態特性都是可以接 受的,並且可預期的應可和實際應用情形接近。本研究最大的價值是可做為氣輪發電系統規 劃、運轉、以及系統擴充的重要參考。
2. 與市電併聯的氣輪發電系統數學模型
與市電併聯的氣輪發電系統數學模型
與市電併聯的氣輪發電系統數學模型
與市電併聯的氣輪發電系統數學模型
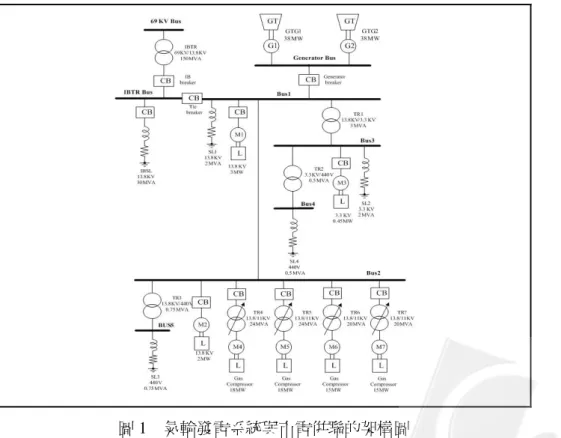
2.1 氣輪發電系統架構氣輪發電系統架構氣輪發電系統架構 氣輪發電系統架構 圖 1 為氣輪發電系統與市電併聯的架構圖。此系統的組件包括 69kV 市電、氣輪機(Gas turbine)、同步發電機(Synchronous generator)、變壓器(Power transformer)、感應電動機 (Induction motor)、以及集總的靜態負載(Lumped static load)。系統組件名稱均已標示在圖 中,系統變數名稱以及組件參數列於附錄中。2.2 系統組件數學模型系統組件數學模型系統組件數學模型 系統組件數學模型
2.2.1 氣輪原動機模型氣輪原動機模型氣輪原動機模型氣輪原動機模型
單軸氣輪原動機模型包括二個部分,單軸氣輪原動機(Gas turbine)以及相關的燃料控 制系統(Fuel system)[34]。控制系統有四個主要的部份︰調速機(Speed governor)、溫度 控制(Temperature control)、加速度控制(Acceleration control)、以及上限和下限燃料限制 (Upper and lower fuel limits)。
圖 2 為一個單軸氣輪原動機簡化模型方塊圖,可以使用狀態方程式表示成 1 1 1 1 1 2 4 2 2 2 2 IL 2 2 2 2 3 3 3 3 3 1 K 0 0 0 0 T T X X K K ( 1 F )K K 1 p X 0 X 0 P T T T T X X F K 1 0 0 0 0 T T ∆ω − − − − = + − (2) 1 1 K 1 sT+ 4 K 2
f
3 3 K 1 sT+ 2 2 K 1 sT+ ∆ω X1 P1L X2 X3 F2 W r ω 2 F2 r f =1.3(W −0.23) 0.5(1+ − ω) 圖 2 單軸氣輪原動機模型方塊圖 2.2.2 三相同步發電機模型三相同步發電機模型三相同步發電機模型三相同步發電機模型 同步發電機運轉時除了必須有原動機供應機械功率外,還要有激磁系統來調節端電 壓。同步發電機由於可以控制虛功率的輸出,所以常應用在容量較大的發電系統。一般而 言,單一發電機組容量大於 5MW 時,都會採用同步發電機。 同步發電機的啟動程序是由氣輪機帶動至同步轉速時,調整激磁使其端電壓達到額 定,再依併聯程序與大型系統完成併聯。併聯完成後,發電機的端電壓、相序、頻率都會 與大型系統相同。當然,如果是透過變壓器與系統併聯,那就應以變壓器的電壓、相序、 頻率為併聯的考量。 同步發電機的電壓方程式參考到轉子軸後可表示成qs s q r d mq r md r md qs ds r q s d r mq md md ds kq mq kq kq kq fd md fd fd md fd kd md md kd kd kd v r pL L pL L L i v L r pL L pL pL i v pL 0 r pL 0 0 i v 0 pL 0 r pL pL i v 0 pL 0 pL r pL i ω ω ω ω ω − − − − − − = − + − + − + (3) 其中 vds、ids是 d 軸定子電壓及電流,vqs、iqs是 q 軸定子電壓及電流,vkq及 ikq是 q 軸阻尼 繞組電壓及電流,vfd、vkd、ifd以及 ikd是激磁繞組電壓、d 軸阻尼繞組電壓、激磁繞組電流、 以及 d 軸阻尼繞組電流,rs、rfd、rkd、以及 rkq是定子繞組電阻、激磁繞組電阻、d 軸阻尼 繞組電阻、以及 q 軸阻尼繞組電阻,Ld、Lq、Lfd、Lkd、以及 Lkq是 d 軸電感、q 軸電感、激 磁繞組電感、d 軸阻尼繞組電感、q 軸阻尼繞組電感,Lmd及 Lmq是 d 軸互感及 q 軸互感,p 是微分運算子。此外,同步發電機所產生的電磁轉矩也可表示成 e m d d s fd kd q s m q q s k q d s 3 T n [ L ( i i i )i L ( i i )i ] 2 = − + + − − + (4)
其中 n 是極對的數目(Number of pole pairs)[35-36]。
2.2.3 三相感應電動機模型三相感應電動機模型三相感應電動機模型三相感應電動機模型 三相感應電動機在定子有三相對稱繞組,在轉子有鼠籠式導體或對稱繞組。感應電動 機電壓方程式參考到靜止軸後可表示成 qs s ss m qs ds s ss m ds qr m r m r rr r rr qr dr r m m r rr r rr dr v r pL 0 pL 0 i v 0 r pL 0 pL i v pL L r pL L i v L pL L r pL i ω ω ω ω + + = − + − + (5)
其中 vds、ids是 d 軸定子電壓及電流,vqs、iqs是 q 軸定子電壓及電流,vdr、idr是 d 軸轉子電
壓及電流,vqr、iqr是 q 軸轉子電壓及電流,rs、rr是定子電阻及轉子電阻,Lss、Lrr是定子 電感及轉子電感,Lm是磁化電感,p 是微分運算子[35]。此外,感應電動機的電磁轉矩可表 示成 e m q s d r d s q r 3 T n L ( i i i i ) 2 = − (6) 其中 n 是極對的數目[36]。
2.2.4 激磁系統模型激磁系統模型激磁系統模型激磁系統模型
自 1968 年起 IEEE 就陸續提出激磁系統(Excitation system)的各種動態模型並且廣泛 的應用在各種研究[37-40]。激磁系統的基本原理是藉由同步發電機端電壓回授訊號與參考 信號相比較後經自動電壓調整器(Automatic voltage regulator, AVR)及勵磁機(Exciter)來 改變激磁電壓,達到控制端電壓的目的。圖 3 為 IEEE Type 1 激磁系統方塊圖,此系統可以 用狀態方程式表示成 R R A A A 1 1 A A A A 2 2 E E 3 3 E E 4 4 5 5 F1 F1 F F F1 F 2 F1 F 2 F 2 1 1 0 0 0 0 0 0 0 0 T T K 1 K K 0 0 0 0 0 0 x x T T T T x x ( K S ) 1 0 0 0 0 0 0 0 0 p x x T T x x 1 1 0 0 0 0 0 0 0 0 x x T T K K 1 0 0 0 0 0 0 0 T T T T T − − − − − + = + − − − T REF 2L 2L 2L v v x x x (7) 圖 3 IEEE Type 1 激磁控制系統方塊圖 2.2.5 三相變壓器模型三相變壓器模型三相變壓器模型三相變壓器模型 變壓器的主要目的是在相同頻率下,將能量從一個電壓準位轉換至另一個電壓準位。 三相變壓器的電壓方程式可表示成 q1 1 11 m q1 d 1 1 11 m d 1 q 2 m 2 22 q 2 d 2 m 2 22 d 2 v r pL 0 pL 0 i v 0 r pL 0 pL i v pL 0 r pL 0 i v 0 pL 0 r pL i + + = + + (9) 其中 vd1及 id1是 d 軸一次側電壓及電流,vq1及 iq1是 q 軸一次側電壓及電流,vd2及 id2是 d 軸二次側電壓及電流,vq2及 iq2是 q 軸二次側電壓及電流,r1及 r2是一次側電阻及二次側
電阻,L11及 L22是一次側自感及二次側自感,Lm是磁化電感,p 是微分運算子。 2.2.6 靜態負載模型靜態負載模型靜態負載模型靜態負載模型 集總的靜態負載可考慮成包含電阻性和電感性負載,其電壓方程式可表示成 0 0 qk sk sk qk dk sk sk dk v r pL i v r pL i + = + (10) 其中 vdk及 idk是 d 軸電壓及電流,vqk及 iqk是 q 軸電壓及電流,rsk及 Lsk是電阻及電感,p 是微分運算子。
3. 與市電併聯的氣輪發電系統動態特性模擬
與市電併聯的氣輪發電系統動態特性模擬
與市電併聯的氣輪發電系統動態特性模擬
與市電併聯的氣輪發電系統動態特性模擬
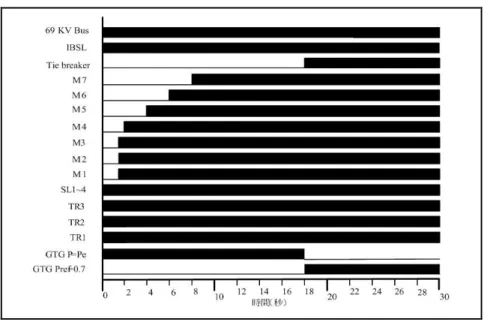
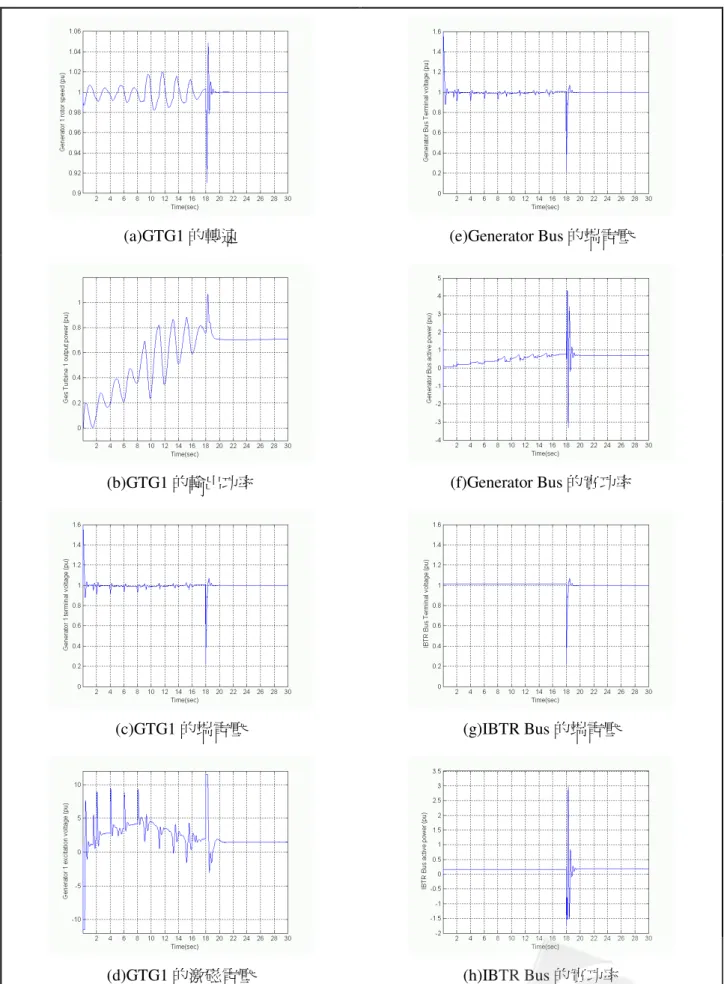
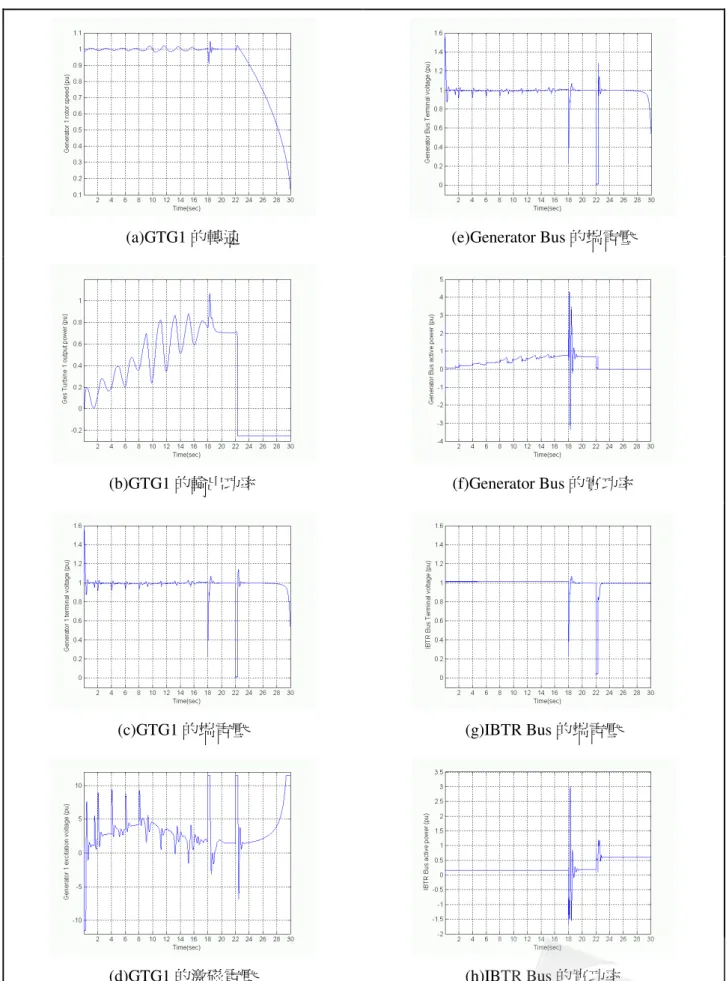
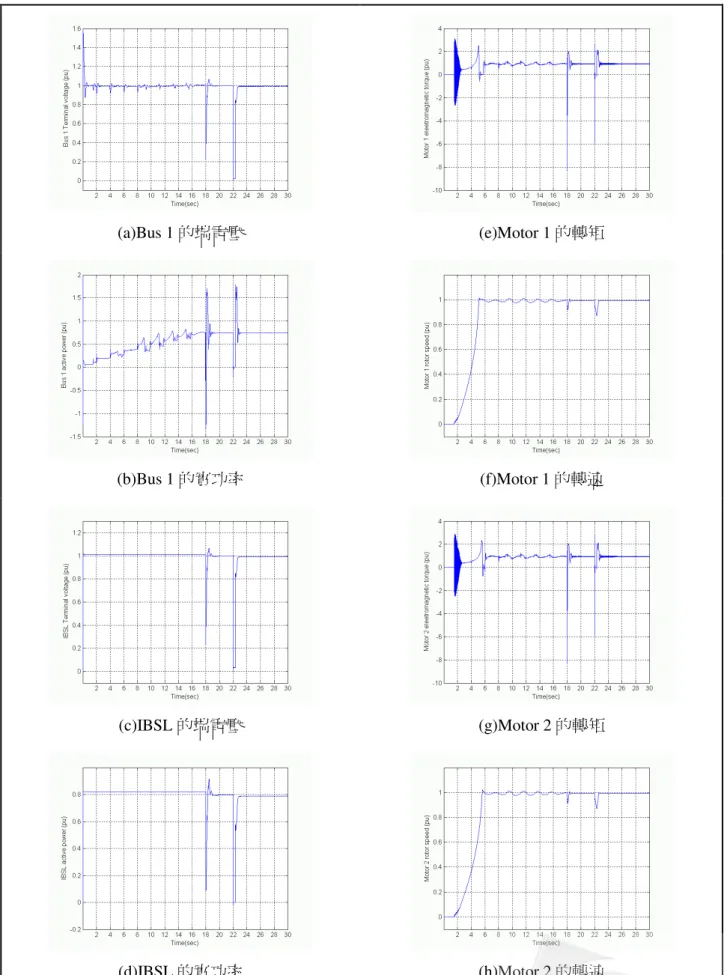
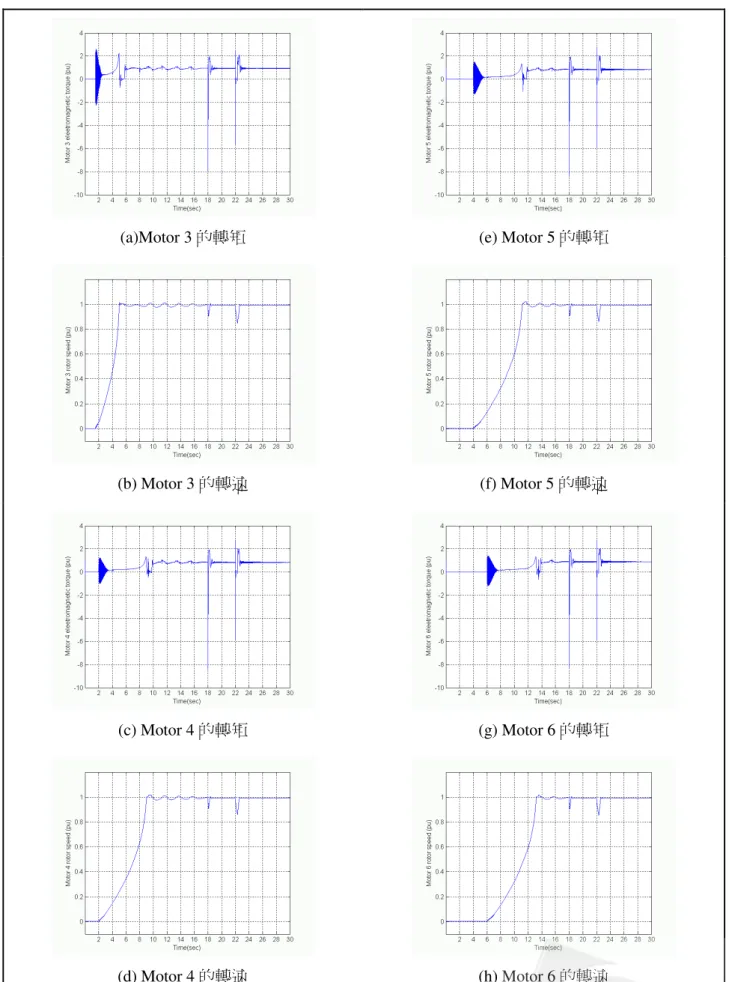
3.1 SimPowerSystems 模組架構模組架構模組架構 模組架構 圖 4 為使用 SimPowerSystems 開發的模組[41~42]。此模組主要包括五部分-A 部分為氣 輪發電系統,B 部分為市電系統,C 部分為變壓器與靜態負載,D 部分為感應電動機,E 部 分為併聯控制器。 圖 4 氣輪發電系統與市電併聯的 SimPowerSystems 模組架構 3.2 正常運轉模擬正常運轉模擬正常運轉模擬 正常運轉模擬 3.2.1 時序圖時序圖時序圖時序圖 圖 5 為正常運轉模擬的時序圖。由圖中可看出氣輪發電系統與 69kV 市電分別獨立運 轉,負載順序加入後,18 秒時在匯流排 1 併聯,氣輪發電機切換為固定輸出功率 0.7pu。 總模擬時間 30 秒。圖 5 正常運轉模擬的時序圖 3.2.2 模擬結果模擬結果模擬結果模擬結果 圖 6~9 為正常運轉模擬系統變數變動的情形,所有的變數都以個別組件的容量為標么 基底表示。由模擬結果可看出此系統的系統變數隨著負載的加入而有程度不同的暫態響 應,暫態的大小和持績時間與組件的容量以及參數有關。18 秒前氣輪發電系統具有負載追 隨性,隨著負載的加入雖有程度不同的暫態響應,但轉速均能維持在同步速度附近。感應 電動機的轉矩、轉速、以及電流都受到電壓和頻率變動的影響。氣輪發電系統與 69kV 市 電併聯時有明顯的暫態發生,系統組件的狀態變數也有明顯的變化,並且迅速回復穩定。 3.3 三相故障模擬三相故障模擬三相故障模擬 三相故障模擬 3.3.1 時序圖時序圖時序圖時序圖 圖 10 為三相故障模擬的時序圖。由圖中可看出 22 秒前與正常運轉模擬相同。22.0 秒 時在發電機匯流排發生三相接地故障,22.3 秒時故障排除並且將兩套氣輪發電系統切離, 由市電供應所有負載所需電力。總模擬時間 30 秒。 3.3.2 模擬結果模擬結果模擬結果模擬結果 圖 11~14 為三相故障模擬系統變數變動的情形,所有的變數都以個別組件的容量為標 么基底表示。此運轉模式在故障發生前的情況與正常運轉模擬相同。在 22.0 秒時,發電機 匯流排發生三相接地故障,造成發電機與匯流排的端電壓嚴重下降、電流急遽增加。由於 電壓嚴重下降,使得發電機的激磁電壓大量增加;由於有效功率的突然降低,使得發電機 的轉速上升。此外,故障發生時匯流排的電壓降低,導致運轉中的電動機轉速下降。22.3 秒故障排除後,兩台氣輪發電機組切離,發電機有略微的過轉速,69kV 市電的電壓有短暫 波動,IBTR 匯流排的實功率迅速增加,全部的感應電動機均恢復正常運轉,匯流排 1 的電 流在短暫波動後恢復故障前的情況。
(a)GTG1 的轉速 (e)Generator Bus 的端電壓
(b)GTG1 的輸出功率 (f)Generator Bus 的實功率
(c)GTG1 的端電壓 (g)IBTR Bus 的端電壓
(d)GTG1 的激磁電壓 (h)IBTR Bus 的實功率
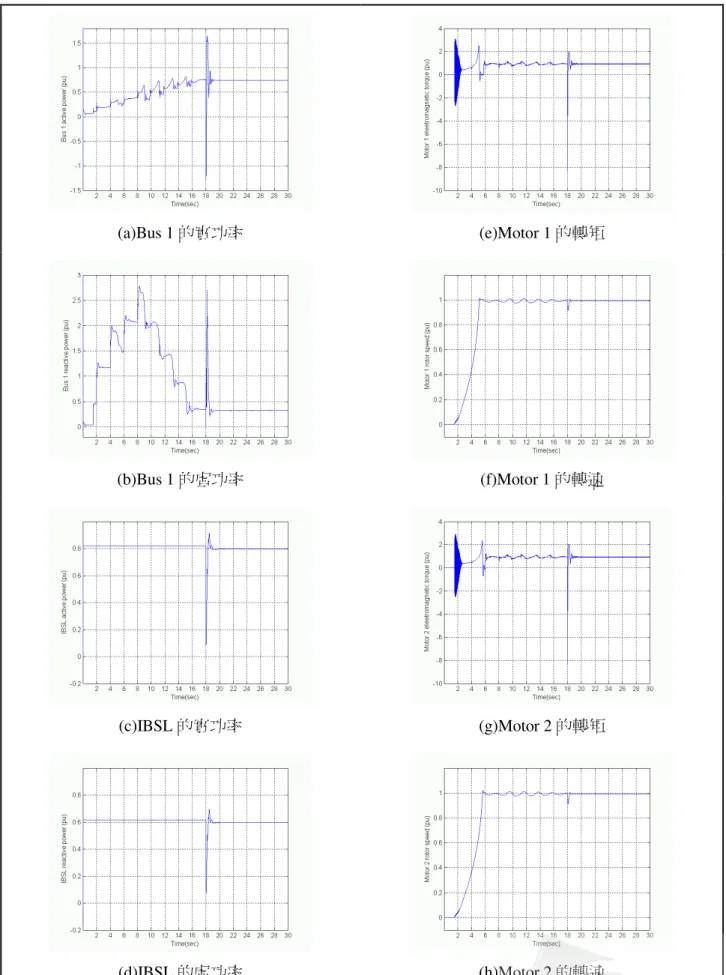
(a)Bus 1 的實功率 (e)Motor 1 的轉矩
(b)Bus 1 的虛功率 (f)Motor 1 的轉速
(c)IBSL 的實功率 (g)Motor 2 的轉矩
(d)IBSL 的虛功率 (h)Motor 2 的轉速
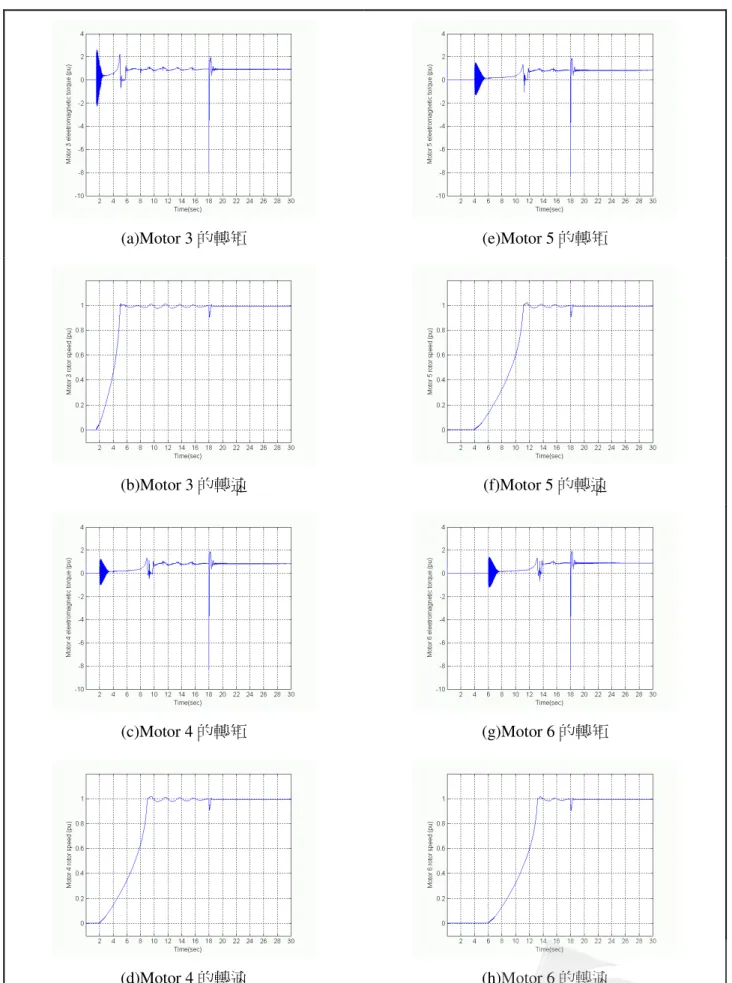
(a)Motor 3 的轉矩 (e)Motor 5 的轉矩
(b)Motor 3 的轉速 (f)Motor 5 的轉速
(c)Motor 4 的轉矩 (g)Motor 6 的轉矩
(d)Motor 4 的轉速 (h)Motor 6 的轉速
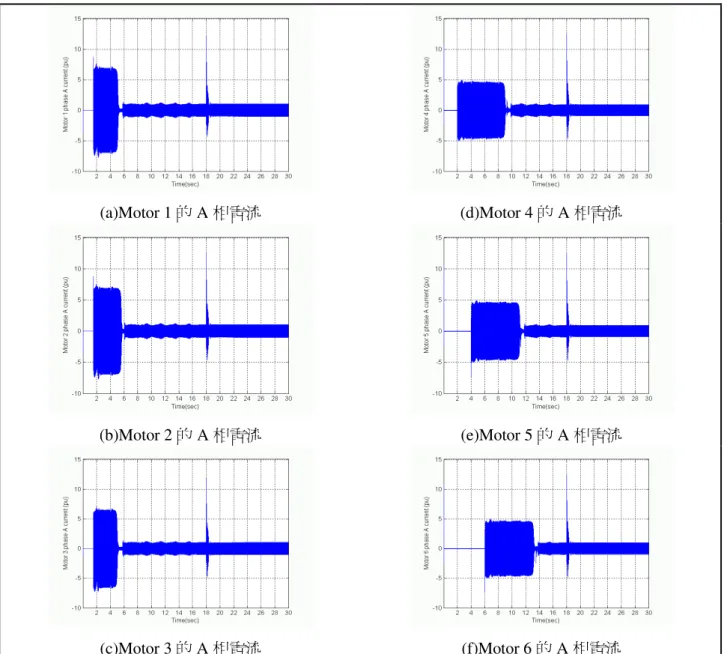
(a)Motor 1 的 A 相電流 (d)Motor 4 的 A 相電流
(b)Motor 2 的 A 相電流 (e)Motor 5 的 A 相電流
(c)Motor 3 的 A 相電流 (f)Motor 6 的 A 相電流
圖 9 正常運轉模擬系統變數變動情形(四)
(a)GTG1 的轉速 (e)Generator Bus 的端電壓
(b)GTG1 的輸出功率 (f)Generator Bus 的實功率
(c)GTG1 的端電壓 (g)IBTR Bus 的端電壓
(d)GTG1 的激磁電壓 (h)IBTR Bus 的實功率
(a)Bus 1 的端電壓 (e)Motor 1 的轉矩
(b)Bus 1 的實功率 (f)Motor 1 的轉速
(c)IBSL 的端電壓 (g)Motor 2 的轉矩
(d)IBSL 的實功率 (h)Motor 2 的轉速
(a)Motor 3 的轉矩 (e) Motor 5 的轉矩
(b) Motor 3 的轉速 (f) Motor 5 的轉速
(c) Motor 4 的轉矩 (g) Motor 6 的轉矩
(d) Motor 4 的轉速 (h) Motor 6 的轉速
(a)Motor 1 的 A 相電流 (d) Motor 4 的 A 相電流 (b)Motor 2 的 A 相電流 (e )Motor 5 的 A 相電流 (c) Motor 3 的 A 相電流 (f) Motor 6 的 A 相電流 圖 14 三相故障運轉模擬系統變數變動情形(四) 3.6 評評評 論評 論論 論 由運轉模式一的模擬結果得知負載順序加入後系統變數變動的情形與預期一致。氣輪發 電系統與 69kV 市電併聯時電壓、頻率都有某種程度的暫態,其原因應該與發電機的激磁系 統和原動機的參數有關,值得進一步探討。另外,對於氣輪發電系統與 69kV 市電的併聯連 結,特別設計匯流排的端電壓同步控制調整模組,結果顯示併聯時的暫態波動振幅以及時間 降低。
由運轉模式二模擬結果得知三相接地故障發生時,系統組件變數變動的情形與預期一 致。故障發生後,氣輪發電系統切離,全部負載由 69kV 市電供應,除了實功率增加外,對 其它系統組件幾乎沒有任何影響,系統應該可以穩定運轉。模擬結果也證實了這個推測。 由運轉模式三的模擬結果得知三相接地故障發生時,系統組件變數變動的情形與預期一致。 69kV 電源切離後,氣輪發電系統的容量獨立供應所有負載,雖然些微超載,系統應該可以穩 定運轉。模擬結果也證實了這個推測。 由運轉模式四的模擬結果得知相間短路故障發生時,系統組件變數變動的情形與預期一 致。故障發生後,69kV 市電與四部大容量感應電動機切離後,氣輪發電系統應該可以獨立的 穩定運轉。模擬結果也證實了這個推測。 整體而言,獨立型氣輪發電系統與 69KV 市電併聯運轉,在這四種運轉模式下的動態特 性都是合理的。然而,在實際的運轉中,事件發生如負載加入、負載切離、故障發生的情形 不一定會如此緊湊,因此系統響應可能會較緩和。此外,由於短路故障模擬的觀察重點在於 故障發生所造成的暫態現象以及故障排除後的行為,所以故障時間設定為 0.3 秒。然而,在 實際的系統運轉中,故障持續時間會因保護電驛的設定而不同,系統組件的切離會因保護協 調的安排而不同,故障造成的影響也會因故障時間點、接地阻抗、以及系統組件參數而不同。
4. 結
結
結 論
結
論
論
論
本論文主要在探討氣輪發電系統與市電併聯運轉時正常和故障情況下的動態特性。研究 範圍除了系統組件的數學模型推導外,也包含了相對應的 SimPowerSystems 模組開發以及進 一步的動態特性模擬分析。研究結果發現氣輪發電系統與市電併聯時,會造成某種程度的暫 態,雖然使用同步控制器使得併聯時的暫態波動振幅和時間降低,暫態現象仍然值得深入探 討。整體而言,氣輪發電系統與市電併聯運轉,在幾種規劃的運轉模式下的動態特性是合理 的,並且應可和實際運轉情形一致。此研究最大的價值是可以做為氣輪發電系統規劃、運轉、 以及擴充的重要依據。參考文獻
參考文獻
參考文獻
參考文獻
[1] Website,http://www.un.org [2] Website,http://english.tier.org.tw [3] Website,http://www.cpc.com.tw/classroom/book/lnggen.htm [4] Website,http://www.tier.org.tw [5] Website,http://www.cpc.com.tw/aboutcpc/lngimport.htm[6] W.W Hung, “Dynamic simulation of gas-turbine generating unit,” IEE Proceedings C--
Generation, Transmission and Distribution, Vol. 138, Issue 4, July 1991, pp.342–350
[7] R.L Doughty, L. Gise, E.W. Kalkstein, and R.D Willoughby, “Electrical studies for an industrial gas turbine cogeneration facility,” IEEE Transactions on Industry Applications, Vol. 25, Issue 4, July-Aug. 1989, pp.750-765
[8] Bagnasco, B. Delfino, G.B. Denegri, and S. Massucco, “Management and dynamic performances of combined cycle power plants during parallel and islanding operation,” IEEE
Transactions on Energy Conversion, Vol. 13, Issue 2, June 1998, pp.194–201
[9] Sharma, “Modeling of an island grid,” IEEE Transactions on Power Systems, Vol. 13, Issue 3, Aug 1998, pp.971–978
[10] D.M. Paine, “Increasing the electrical output of a cogeneration plant,” IEEE Transactions on
Industry Applications, Vol. 38, Issue 3, May-June 2002, pp.726–735
[11] S.R. Shilling, “Electrical transient stability and underfrequency load shedding analysis for a large pump station,” IEEE Transactions on Industry Applications, Vol. 33, Issue 1, Jan-Feb 1997, pp.194–201
[12] L.M. Hajagos and G.R. Berube, “Utility experience with gas turbine testing and modeling,”
IEEE Power Engineering Society Winter Meeting, Vol. 2, 2001, pp.671-677
[13] N. Chiras, C. Evans, and D. Rees, “Nonlinear gas turbine modeling using NARMAX structures,” IEEE Transactions on Instrumentation and Measurement, Vol. 50, Issue 4, Aug. 2001, pp.893-898
[14] M. Nagpal, A. Moshref, G.K. Morison, and P. Kundur, “Experience with testing and modeling of gas turbines,” IEEE Power Engineering Society Winter Meeting, Vol. 2, 2001, pp.652-656 [15] L.N. Hannett, A.H. Khan, “Combustion turbine dynamic model validation from tests,” IEEE
Transactions on Power Systems, Vol. 8, Issue 1, Feb 1993, pp.152–158
[16] K. Maslo, J. Andel, “Gas turbine model using in design of heat and power stations,” IEEE
Porto Power Tech Proceedings, Vol. 4 , 2001, pp.6/1-6/6
[17] Evans, A. Borrell, D. Rees, “Validation of thermodynamic gas turbine models using frequency-domain techniques,” IEEE Instrumentation and Measurement Technology
Conference, Vol. 2 , 1998 ,pp. 993 -998
[18] H.J. Nern, H. Kreshman, F. Fischer, H.A. Nour Eldin, “Modelling of the long term dynamic performance of a gas turbo generator set,” Proceedings of the Third IEEE Conference on
Control Applications, vol. 1, 1994, pp. 491-496
[19] F. Jurado and J.R. Saenz, “Adaptive control of a fuel cell-microturbine hybrid power plant,” IEEE Power Engineering Society Summer Meeting, Vol. 1, July 2002, pp.76-81
[20] G. Steinfeld, H.C Maru, and R.A. Sanderson, “High efficiency carbonate fuel cell/turbine hybrid power cycle,” IEEE Energy Conversion Engineering Conference, Vol. 2, Aug. 1996, pp.1123-1127
[21] S. Hamilton, “Fuel cell-mtg hybrid: the most exciting innovation in power in the next 10 years,” IEEE Power Engineering Society Summer Meeting, Vol. 1, July 1999, pp.581-586
[22] G.L. Berta, F. Durelli, and A.P. Prato, “A special arrangement of hybrid gas turbines,” IEEE
Energy Conversion Engineering Conference, Vol. 5, August 1990, pp.495-501
[23] N. Kakimoto and K. Baba, “Performance of gas turbine-based plants during frequency drops,”
IEEE Transactions on Power Systems, Vol. 18, Issue 3, Aug. 2003, pp.1110-1115
[24] K. Kunitomi, A. Kurita, Y. Tada, S. Ihara, W.W. Price, L.M. Richardson, and G. Smith, “Modeling combined-cycle power plant for simulation of frequency excursions,” IEEE
Transactions on Power Systems, Vol. 18, Issue 2, May 2003, pp.724-729
[25] W.I. Rowen, “Dynamic response characteristics of heavy duty gas turbines and combined cycle systems in frequency regulating duty,” IEE Colloquium on Frequency Control Capability of
Generating Plant, 1995, pp.6/1-6/6
[26] R.P. Smith, “Power generation using high efficiency aeroderivative gas turbines,”
Opportunities and Advances in International Electric Power Generation, International
Conference on (Conf. Publ. No. 419), March 1996, pp.104- 110
[27] N. Kayukawa, “Comparative studies of advanced MHD topping power generation systems,”
Intersociety Energy Conversion Engineering Conference and Exhibit, (IECEC)35th, Vol. 1,
July 2000, pp. 484-492
[28] D.H. Archer, J.G. Wimer, M.C. Williams, “Power generation by combined fuel cell and gas turbine systems,” Intersociety Energy Conversion Engineering Conference, Proceedings of the
31st Intersociety, Vol. 2, Aug 1996, pp.1117-1122
[29] T.E. Ekstrom, “Reliability/availability guarantees of gas turbine and combined cycle generating units,” IEEE Industry Applications Society Annual Meeting, Vol. 3 ,Oct 1994, pp.2209- 2225
[30] W.S. Zimmermann, S. Hopp, M. Bondeur, D.N. Chen, “Transient stability study of the Hsin Yu Co-Generation plant in Hsin-Chu science based industrial park in Taiwan,” IEEE Power
Engineering Society Winter Meeting, Vol.1, Jan 2000, pp.452-457
[31] J.L. Aguero, M. Beroqui, R. Molina, “Combined cycle plants: models and in-situ reliability tests,” IEEE Power Engineering Society Summer Meeting, Vol. 3, July 2001, pp.1788-1793 [32] R. Lasseter, “Dynamic models for micro-turbines and fuel cells,” IEEE Power Engineering
Society Summer Meeting, Vol. 2, July 2001, pp.761-766
[33] J.W. Kim and S.W. Kim, “Design of incremental fuzzy PI controllers for a gas-turbine plant,”
IEEE/ASME Transactions on Mechatronics, Vol. 8, Issue 3, Sept. 2003, pp.410-414
[34] W.I. Rowen, “Simplified mathematical representations of heavy-duty gas turbine,” ASME
Journal of Engineering for Power, 83-GT-63
[35] P.C. Krause, Analysis of Electric Machinery and Drive System, 2nd Ed., McGRAW-Hill Book Co., Dec 2001
[36] C.-M. Ong, Dynamic Simulation of Electric Machinery using MATLAB/Simulink, McGRAW- Hill Book Co., USA, 1998
[37] IEEE Committee Report, “Computer representation of excitation systems,” IEEE Transactions
[38] IEEE Committee Report, “Excitation system dynamic characteristics,” IEEE Transactions on
Power Apparatus and Systems, PAS-92, 1973, pp.1460-1464
[39] IEEE Committee Report, “Excitation system models for power system stability studies,” IEEE
Transaction on Power Apparatus and Systems, PAS-100, 1981, pp.494-509
[40] IEEE Committee Report, “Computer models for representation of digital-based excitation systems,” IEEE Transaction on Energy Conversion, Vol. 10, Issue 4, Dec. 1996, pp.706-713 [41] Using Simulink, The Mathworks Inc., 2005
附錄
附錄
附錄
附錄 氣輪發電系統與市電併聯動態模擬組件參數
氣輪發電系統與市電併聯動態模擬組件參數
氣輪發電系統與市電併聯動態模擬組件參數
氣輪發電系統與市電併聯動態模擬組件參數
系統組件 GT1 系統組件 GT2 增益 時間常數 增益 時間常數 調速器 20.00 0.50 調速器 20.00 0.50 燃料閥位置 1.000 0.05 燃料閥位置 1.000 0.05 燃料系統 1.000 0.01 燃料系統 1.000 0.01 燃料回饋 0.000 0.00 燃料回饋 0.000 0.00 上限 1.500 上限 1.500 功率限制 下限 -0.100 功率限制 下限 -0.100 系統組件 GTG1 系統組件 GTG2 額定功率 (MW) 38.000 額定功率 (MW) 38.000 端電壓 (KV) 13.800 端電壓 (KV) 13.800 額定頻率 (Hz) 60.000 額定頻率 (Hz) 60.000 極數 4.0000 極數 4.0000 D 軸互感(pu) 1.3870 D 軸互感(pu) 1.3870 Q 軸互感(pu) 1.3020 Q 軸互感(pu) 1.3020 定子漏電抗 (pu) 0.0970 定子漏電抗 (pu) 0.0970 磁場漏電抗 (pu) 0.0600 磁場漏電抗 (pu) 0.0600 D 軸阻尼漏電抗 (pu) 0.0055 D 軸阻尼漏電抗 (pu) 0.0055 Q 軸阻尼漏電抗 (pu) 0.0020 Q 軸阻尼漏電抗 (pu) 0.0020 定子電阻 (pu) 0.0030 定子電阻 (pu) 0.0030 磁場電阻 (pu) 0.0009 磁場電阻 (pu) 0.0009 D 軸阻尼電阻 (pu) 0.0057 D 軸阻尼電阻 (pu) 0.0057 Q 軸阻尼電阻 (pu) 0.0198 Q 軸阻尼電阻 (pu) 0.0198 慣性常數 (s-MW/MVA) 1.8900 慣性常數 (s-MW/MVA) 1.8900 系統組件 69KV Bus 系統組件 IBTR 額定容量 (MVA) 250.00 額定容量 (MVA) 150.00 額定電壓 (kV) 69.000 一次側電壓 (kV) 69.000 電源測電阻 (pu) 0.001 一次側額定線電流 (A) 1225.1電源測漏電抗 (pu) 0.006 二次側電壓 (kV) 13.800 額定頻率(Hz) 60.00 二次側額定線電流 (A) 6275.5 一次側電阻 (pu) 0.0040 系統組件 IBSL 一次側漏電抗 (pu) 0.0360 端電壓 (KV) 13.800 二次側電阻 (pu) 0.0040 實功率(MW) 16.000 二次側漏電抗 (pu) 0.0360 虛功率(MW) 12.000 磁化電抗 (pu) 47.500 連接型式 (pu) D - Y 系統組件 TR1 系統組件 TR2 額定容量 (MVA) 3.0000 額定容量 (MVA) 0.5000 一次側電壓 (kV) 13.800 一次側電壓 (kV) 3.3000 一次側額定線電流 (A) 125.51 一次側額定線電流 (A) 87.477 二次側電壓 (kV) 3.3000 二次側電壓 (kV) 0.4400 二次側額定線電流 (A) 524.86 二次側額定線電流 (A) 656.08 一次側電阻 (pu) 0.0027 一次側電阻 (pu) 0.0133 一次側漏電抗 (pu) 0.0300 一次側漏電抗 (pu) 0.0400 二次側電阻 (pu) 0.0027 二次側電阻 (pu) 0.0133 二次側漏電抗 (pu) 0.0300 二次側漏電抗 (pu) 0.0400 磁化電抗 (pu) 312.00 磁化電抗 (pu) 22.540
連接型式 (pu) Y-D 連接型式 (pu) Y-D
系統組件 TR3 系統組件 TR4 額定容量 (MVA) 0.7500 額定容量 (MVA) 24.0000 一次側電壓 (kV) 13.800 一次側電壓 (kV) 13.800 一次側額定線電流 (A) 31.378 二次側電壓 (kV) 11.000 二次側電壓 (kV) 0.4400 一次側電阻 (pu) 0.0027 二次側額定線電流 (A) 984.12 一次側漏電抗 (pu) 0.0300 一次側電阻 (pu) 0.0133 二次側電阻 (pu) 0.0027 一次側漏電抗 (pu) 0.0400 二次側漏電抗 (pu) 0.0300 二次側電阻 (pu) 0.0133 磁化電抗 (pu) 312.00
二次側漏電抗 (pu) 0.0400 連接型式 (pu) Y-Y 磁化電抗 (pu) 22.540 啟動電壓分接頭 80% 連接型式 (pu) Y-D 系統組件 TR5 系統組件 TR6 額定容量 (MVA) 24.0000 額定容量 (MVA) 20.0000 一次側電壓 (kV) 13.800 一次側電壓 (kV) 13.800 二次側電壓 (kV) 11.000 二次側電壓 (kV) 11.000 一次側電阻 (pu) 0.0027 一次側電阻 (pu) 0.0027 一次側漏電抗 (pu) 0.0300 一次側漏電抗 (pu) 0.0300 二次側電阻 (pu) 0.0027 二次側電阻 (pu) 0.0027 二次側漏電抗 (pu) 0.0300 二次側漏電抗 (pu) 0.0300 磁化電抗 (pu) 312.00 磁化電抗 (pu) 312.00
連接型式 (pu) Y-Y 連接型式 (pu) Y-Y
啟動電壓分接頭 80% 啟動電壓分接頭 80% 系統組件 TR7 系統組件 M1 額定容量 (MVA) 20.0000 額定功率 (MW) 3.0000 一次側電壓 (kV) 13.800 端電壓 (KV) 13.800 二次側電壓 (kV) 11.000 額定頻率 (Hz) 60.000 一次側電阻 (pu) 0.0027 極數 4.0000 一次側漏電抗 (pu) 0.0300 額定線電流(A) 125.51 二次側電阻 (pu) 0.0027 定子電阻 (pu) 0.0092 二次側漏電抗 (pu) 0.0300 定子漏電抗 (pu) 0.0717 磁化電抗 (pu) 312.00 磁化電抗 (pu) 3.8600
連接型式 (pu) Y-Y 轉子電阻 (pu) 0.0080
啟動電壓分接頭 80% 轉子漏電抗 (pu) 0.0717
慣性常數 (s-kW/kVA) 1.2000
系統組件 M2 系統組件 M3
額定功率 (MW) 2.0000 額定功率 (MW) 0.4500
額定頻率 (Hz) 60.000 額定頻率 (Hz) 60.000 極數 4.0000 極數 4.0000 額定線電流(A) 83.674 額定線電流(A) 78.729 定子電阻 (pu) 0.0092 定子電阻 (pu) 0.0092 定子漏電抗 (pu) 0.0717 定子漏電抗 (pu) 0.0717 磁化電抗 (pu) 3.8600 磁化電抗 (pu) 3.8600 轉子電阻 (pu) 0.0070 轉子電阻 (pu) 0.0075 轉子漏電抗 (pu) 0.0717 轉子漏電抗 (pu) 0.0717 慣性常數 (s-kW/kVA) 1.2000 慣性常數 (s-kW/kVA) 1.0000 系統組件 M4 系統組件 M5 額定功率 (MW) 18.0000 額定功率 (MW) 18.0000 端電壓 (KV) 13.800 端電壓 (KV) 13.800 額定頻率 (Hz) 60.000 額定頻率 (Hz) 60.000 極數 4.0000 極數 4.0000 額定線電流(A) 753.06 額定線電流(A) 753.06 定子電阻 (pu) 0.0092 定子電阻 (pu) 0.0092 定子漏電抗 (pu) 0.0717 定子漏電抗 (pu) 0.0717 磁化電抗 (pu) 3.8600 磁化電抗 (pu) 3.8600 轉子電阻 (pu) 0.0073 轉子電阻 (pu) 0.0073 轉子漏電抗 (pu) 0.0717 轉子漏電抗 (pu) 0.0717 慣性常數 (s-kW/kVA) 1.0000 慣性常數 (s-kW/kVA) 1.0000 系統組件 M6 系統組件 M7 額定功率 (MW) 15.0000 額定功率 (MW) 15.0000 端電壓 (KV) 13.800 端電壓 (KV) 13.800 額定頻率 (Hz) 60.000 額定頻率 (Hz) 60.000 極數 4.0000 極數 4.0000 額定線電流(A) 627.55 額定線電流(A) 627.55 定子電阻 (pu) 0.0092 定子電阻 (pu) 0.0092 定子漏電抗 (pu) 0.0717 定子漏電抗 (pu) 0.0717
磁化電抗 (pu) 3.8600 磁化電抗 (pu) 3.8600 轉子電阻 (pu) 0.0072 轉子電阻 (pu) 0.0072 轉子漏電抗 (pu) 0.0717 轉子漏電抗 (pu) 0.0717 慣性常數 (s-kW/kVA) 1.0000 慣性常數 (s-kW/kVA) 1.0000 系統組件 SL1 系統組件 SL2 端電壓 (KV) 13.800 端電壓 (KV) 3.300 實功率(MW) 1.6.000 實功率(MW) 1.600 虛功率(MW) 1.2.000 虛功率(MW) 1.200 系統組件 SL3 系統組件 SL4 端電壓 (KV) 0.440 端電壓 (KV) 0.440 實功率(MW) 0.600 實功率(MW) 0.400 虛功率(MW) 0.450 虛功率(MW) 0.300