Low power consumption focusing actuator for a mini video camera
Hsing-Cheng Yu, Tzung-Yuan Lee, Shir-Kuan Lin, Li-Te Kuo, Shyh-Jier Wang, Jau-Jiu Ju, and Der-Ray Huang
Citation: Journal of Applied Physics 99, 08R901 (2006); doi: 10.1063/1.2158927 View online: http://dx.doi.org/10.1063/1.2158927
View Table of Contents: http://scitation.aip.org/content/aip/journal/jap/99/8?ver=pdfcov Published by the AIP Publishing
Articles you may be interested in Video Analysis with a Web Camera
Phys. Teach. 47, 28 (2009); 10.1119/1.3049874
A method to study the cooling effect of the thermal actuator J. Appl. Phys. 103, 07F532 (2008); 10.1063/1.2839922
Design and implementation of antihandshaking position control for a voice coil motor J. Appl. Phys. 103, 07F128 (2008); 10.1063/1.2839338
Fundamental study for rosary-shaped magnetic actuators J. Appl. Phys. 83, 7109 (1998); 10.1063/1.367534
Vertical ramp-actuated inertial micropositioner with a rolling-balls guide Rev. Sci. Instrum. 68, 136 (1997); 10.1063/1.1147848
[This article is copyrighted as indicated in the article. Reuse of AIP content is subject to the terms at: http://scitation.aip.org/termsconditions. Downloaded to ] IP: 140.113.38.11 On: Thu, 01 May 2014 02:03:25
Low power consumption focusing actuator for a mini video camera
Hsing-Cheng Yua兲
Optoelectronics and Systems Laboratories, Industrial Technology Research Institute, Room 402, Building 78, No. 195, Sec. 4, Chung Hsing Road, Chutung, Hsinchu, Taiwan, Republic of China 310
Tzung-Yuan Lee and Shir-Kuan Lin
Department of Electrical and Control Engineering, National Chiao Tung University, Hsinchu, Taiwan, Republic of China 300
Li-Te Kuo, Shyh-Jier Wang, Jau-Jiu Ju, and Der-Ray Huang
Optoelectronics and Systems Laboratories, Industrial Technology Research Institute, Room 402, Building 78, No. 195, Sec. 4, Chung Hsing Road, Chutung, Hsinchu, Taiwan, Republic of China 310
共Presented on 3 November 2005; published online 17 April 2006兲
A novel low power consumption autofocusing actuator in a mini video camera is constructed in accordance with the result of a systematic design procedure of voice coil motors共VCM兲. This paper emphasizes the position control of such a VCM. The position feedback signals are provided by a magnetoresistive共MR兲 encoder. The position estimation algorithm 共PEA兲 is developed to precisely decode the MR signals for the position of the moving part of the VCM. Different postures change the loading of the moving part of the VCM, so that an adaptive model-following control system based on the PEA is proposed to compensate for the loading variation. The experiments verify the fast dynamic performance and high power efficiency of the VCM. © 2006 American Institute of
Physics.关DOI:10.1063/1.2158927兴
I. INTRODUCTION
Digital video cameras are popular consumer electronic products. The conventional stepper actuators for autofocus-ing 共AF兲 can no longer meet the miniaturization of digital video cameras. Instead, voice coil motors共VCM兲 are gradu-ally used as AF actuators in mini video cameras共MVC兲. A typical VCM for AF is only 1 / 6th as short as a stepper mo-tor. The works dealing with the design of VCM almost con-sidered only the fast dynamic response.1,2However, to meet the requirements of the AF system of a MVC, a VCM should have high power efficiency as well as good AF response. A systematic design procedure of VCM was already proposed by an earlier work3of the authors to satisfy the fast dynamic performance and high power efficiency. The remaining prob-lem is the position control law of the VCM. A magnetoresis-tive共MR兲 encoder is used in the VCM system to provide the position feedback. Such an encoding requires an interpola-tion chip to precisely decode. A consumer MVC cannot sup-port an expensive interpolation chip. Hence, this paper pre-sents a position estimation algorithm 共PEA兲, which is so simple to be programmed in a usual single-chip microproces-sor in company with the position control algorithm. On the other hand, this paper also applies the adaptive model-following control 共AMFC兲 law4,5 to the position control, which is shown to be able to compensate for the loading variation of the moving part of the VCM in different posture.
II. VOICE COIL MOTOR MODEL
The VCM model for the AF system consists of a perma-nent magnet, a moving coil, a yoke, a steel plate, and a MR
encoder as shown in Figs. 1共a兲 and 1共b兲 with two different view angles. A lens holder for carrying an optical focusing lens is driven by the moving coil of the VCM. Additionally, two guide rods maintain the trajectory of the lens holder from twisting. A MR encoder consists of a MR sensor and a linear magnetic strip with 0.8-mm polar pitch. The linear magnetic strip is mounted on the side of lens holder and the MR sensor is used to pick up the magnetic signals, so that the moving positions of the VCM can be obtained from the MR encoder.
A novel low power VCM model has been designed and constructed according to a systematic design procedure,3 which uses three performance indexes to select the dimen-sion parameters of the VCM, so that low power consump-tion, high efficiency, and fast focusing can be assured. This design procedure applies the three-dimensional finite ele-ment magnetic simulation and the Maxwell-stress method to the calculation of the magnetic field distribution and the elec-tromagnetic force constant.
III. POSITION ESTIMATION ALGORITHM AND ADAPTIVE MODEL-FOLLOWING CONTROL
The hardware of the AF system of a VCM is illustrated in Fig. 2. An 8-bit single-chip microprocessor constructs the
a兲Author to whom correspondence should be addressed; electronic mail:
[email protected] FIG. 1. The structure of the VCM for the AF system.
JOURNAL OF APPLIED PHYSICS 99, 08R901共2006兲
0021-8979/2006/99共8兲/08R901/3/$23.00 99, 08R901-1 © 2006 American Institute of Physics [This article is copyrighted as indicated in the article. Reuse of AIP content is subject to the terms at: http://scitation.aip.org/termsconditions. Downloaded to ] IP:
main body of the controller, which acquires the MR sensor signals using the 12-bit analog/digital 共A/D兲 converters. As the VCM moves the lens holder, the MR sensor generates two sinusoidal signals with a 90° phase shift. The signals pass through low-pass filters and amplifiers before entering the two-channel A/D converters. A position estimation algo-rithm 共PEA兲 and the adaptive model following control 共AMFC兲 law are implemented to generate the control com-mand for the VCM driver, which drives the VCM by pulse width modulation voltage signals.
The PEA is developed to estimate the position of the moving part of the VCM as follows. As the VCM moves between the two photointerrupts PIR1 and PIR2, two sinu-soidal signals are generated by the MR in the form of
xA= bA+ XAsine, 共1兲
xB= bB+ XBcose, 共2兲 whereeis the electrical angle, and
bA= max共xA兲 + min共xA兲 2 , XA= max共xA兲 − min共xA兲 2 , 共3兲 bB= max共xB兲 + min共xB兲 2 , XB= max共xB兲 − min共xB兲 2 . 共4兲
Hence, the normalized form of xAand xBcan be obtained as
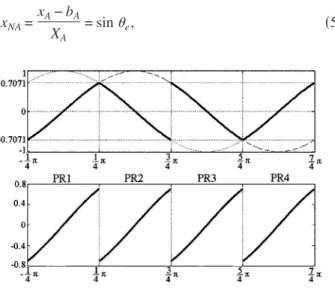
xNA= xA− bA XA = sine, 共5兲 xNB= xB− bA XB = cose. 共6兲
If we divide the period of these two sinusoidal signals into four regions with multipliers of/ 4 as delimits, the values of xNAin PR1共−/ 4 to/ 4兲 and PR3 共3/ 4 to 5/ 4兲 are within 0.7071 and −0.7071 as shown in Fig. 3, so are those of xNBin PR2 and PR4. Each region corresponds to a quarter of the 0.8-mm polar pitch of the MR encoder, where the values of xNAand xNBcan be approximated by linear regres-sion without the displacement error over 3m. Thus, the position of the moving part of the VCM, p, can be obtained as
p = 0.2n +共0.1 + 0.1414s兲, 共7兲
where n is the number of PR that the VCM have passed, and
s = xNA, −xNB, −xNA, and xNB for e in PR1, PR2, PR3, and PR4, respectively共see Fig. 3兲. Comparing xNA, and xNBwith 0.7071 and −0.7071, we can easily determine which phase regioneis located.
The proposed AMFC system for the AF system is illus-trated in Fig. 4. It consists of two parts: PI controllers and an adaptation mechanism. The PI controllers are in the form of
v*共t兲 = K
Pd· ed共t兲 + KId
冕
ed共t兲dt, 共8兲V共t兲 = KPv· ev共t兲 + KIv
冕
ev共t兲dt, 共9兲 wherev*共t兲 and V共t兲 are the velocity command and thecon-trol voltage, respectively; KPd, KId, KPvand KIvare the
con-FIG. 3. Four independent phase regions in a periodic sinusoid.
FIG. 4. The AMFC system for the AF system.
FIG. 5. 共a兲 The compensatory control voltage. 共b兲 The difference between the estimated and external loading variation.
FIG. 2. The hardware block diagram of the AF system of a VCM.
08R901-2 Yu et al. J. Appl. Phys. 99, 08R901共2006兲
[This article is copyrighted as indicated in the article. Reuse of AIP content is subject to the terms at: http://scitation.aip.org/termsconditions. Downloaded to ] IP: 140.113.38.11 On: Thu, 01 May 2014 02:03:25
trol gains; and ed共t兲 and ev共t兲 are the displacement error and the velocity error, respectively.
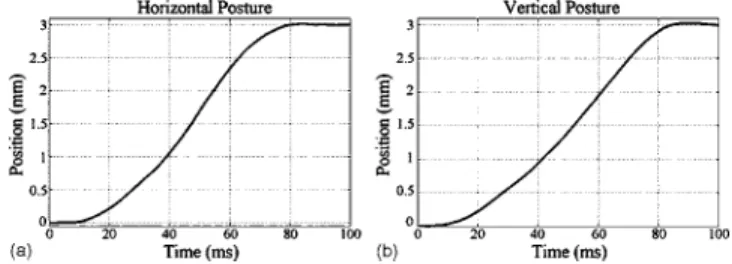
In an MVC the loading of the AF system, T共t兲, varies with operating posture. An adaptive loop6 is then added to preserve the same control performance as that of the constant loading case. The velocity 共v¯兲 of the moving part of the VCM is compared to that of the reference model 共ve兲 to obtain the error signal e¯v, which is then used by the adapta-tion mechanism to estimate the loading. Finally, the esti-mated loading Te is factored by R / Kf to find out the com-pensatory voltage Vethat will cancel the disturbance of the loading T共t兲. The simulation results in Fig. 5 demonstrate the effect of the adaptation mechanism. The generated compen-satory voltage Ve, in Fig. 5共a兲 converges to a steady value when the loading is changed, e.g., the portion after 70 ms. The estimated loading is very close to the actual loading as shown in Fig. 5共b兲. Given the target of the AF position at 3.0 mm, Fig. 6 and Table I furthermore show the simulation results for the MVC in horizontal and the vertical posture, which corresponds to the minimum and the maximum load-ing T共t兲, respectively. These results satisfy the performance requirements of a MVC.
IV. EXPERIMENTS
The algorithms of the PEA and AMFC are programmed in a single-chip microprocessor. The reference model of the AMDC can be formularized as a linear equation according to some VCM driving tests with different input voltages 共V兲. Hence, the microprocessor calculates ve using this linear model equation.
The experimental results are measured by a laser dis-placement meter with 0.5m resolution and a digital oscil-loscope. Figure 7 and Table I show the experimental results with the control target at 3 mm. While the AF system is operated in the horizontal posture, only the moving friction affects T共t兲, and the AMFC system will make the moving part of the VCM quickly reach the expected position. On the contrary, the loading T共t兲 is the maximum for the vertical posture, because it is the sum of the friction and the weight force of the moving part of the VCM. Thus, the response time and the power consumption in this posture are larger as shown in Table I.
V. CONCLUSIONS
This paper proposes the adaptive model-following con-trol共AMFC兲 method based on the position estimation algo-rithm 共PEA兲 to obtain fast dynamic characteristics, high power efficiency, and low power consumption of the voice coil motor共VCM兲. The PEA has been developed to calculate the position of the moving part of the VCM accurately. The AMFC system with two proportional-integral controllers based on the PEA can compensate for the loading variation of the moving part of the VCM in different operating pos-ture. A compensatory control voltage is estimated by the ad-aptation mechanism and is supplied to the VCM plant to compensate for the loading variation. Experiments with ex-treme cases of maximum and minimum loadings were con-ducted. The experimental results show that the control per-formance matches the design requirements.
ACKNOWLEDGMENT
This work was supported in part by the National Science Council, Taiwan, under Grant No. NSC 93-2218-E-009-034.
1S. M. Jang, J. Y. Choi, S. H. Lee, H. W. Cho, and W. B. Jang, IEEE Trans. Magn. 40, 2068共2004兲.
2Y. Hirano and J. Naurse, IEEE Trans. Magn. 25, 3073共1989兲.
3H. C. Yu, T. Y. Lee, S. J. Wang, M. L. Lai, J. J. Ju, D. R. Huang, and S. K. Lin, IEEE Trans. Magn. 41, 3979共2005兲.
4J. W. Gilbart and G. C. Winston, Automatica 10, 125共1974兲.
5J. Van Amerongen and A. J. Udink Ten Cate, Automatica 11, 441共1975兲. 6Y. D. Landau, Adaptive Control: The Model Reference Approach共1979兲. FIG. 6. The time responses of the simulations in共a兲 horizontal and 共b兲
vertical posture.
TABLE I. Comparison with the simulated and experimental results.
Parameters Unit
Simulation results Experimental results Horizontal Vertical Horizontal Vertical
Risetime ms 24 32 45 52 Maximum overshoot m 0 0 11 25 Steady-state error m 12 4 20 15
FIG. 7. The time responses of the experiments in共a兲 horizontal and 共b兲 vertical posture.
08R901-3 Yu et al. J. Appl. Phys. 99, 08R901共2006兲
[This article is copyrighted as indicated in the article. Reuse of AIP content is subject to the terms at: http://scitation.aip.org/termsconditions. Downloaded to ] IP: 140.113.38.11 On: Thu, 01 May 2014 02:03:25