具殘留應力薄膜結構的熱彈聲波波傳
Thermal Acoustic Wave Propagation in Stressed
Thin-film Structures
研 究 生:張桓禎 Student:Huan-Chen Chang 指導教授:尹慶中 博士 Advisor:Dr. Ching-Chung Yin
國 立 交 通 大 學 機 械 工 程 研 究 所
碩 士 論 文
A Thesis
Submitted to Department of Mechanical Engineering
College of Engineering National Chiao Tung University
in partial Fulfillment of the Requirements
for the Degree of Master
in
Mechanical Engineering
September 2006
Hsinchu, Taiwan, Republic of China
具殘留應力薄膜結構的熱彈聲波波傳
研究生:張桓禎 指導教授:尹慶中博士 國立交通大學機械工程學系碩士班摘 要
光聲效應主要應用於量測材料的光學、熱物理性質與微結構的次表面性 質。本文根據徹體波的聲彈理論,推導層狀介質殘留應力的熱彈聲波理論, 模擬薄膜材料的光聲效應。薄膜材料廣泛應用於半導體與光電元件,當薄 膜材料的晶格大小與基材不一致,甚或兩者熱膨脹係數相異時,在薄膜上 會產生殘留應力。本文推導高斯分佈之強度調制雷射光束照射薄膜結構表 面,模擬單晶立方材料承受單軸與雙軸面內殘留應力的光聲效應變化。以 數值分析塊材的徹體波與熱波之相速度與振幅衰減,兩者的變化均與殘留 應力大小呈線性關係。薄膜結構的熱彈性波頻散分析遭遇數值不穩定問 題,故以定性方式探討熱彈性藍姆波頻散方程之波數複數根的變化。 關鍵字:光聲效應、熱彈聲波、殘留應力、薄膜結構Thermal Acoustic Wave Propagation in Stressed Thin-film
Structures
Student:Huan-Chen Chang Advisor:Dr. Ching-Chung Yin
Deparment of Mechanical Engineering National Chiao Tung University
ABSTRACT
Photoacoustic effect is used to measure optical, thermal physical properties of materials and to characterize the subsurface properties of microstructures. This thesis presents a formulation for thermal acoustic wave propagation in stressed layered media based on the acoustoelasticity for bulk acoustic waves in order to simulate photoacoustic effect of thin-film materials. Thin-film materials are broadly used in many applications of semiconductor and electro-optic devices. Due to misfit between different lattices or distinction of coefficients of thermal expansion of the heterostructures, residual stresses are frequently induced in thin film structures during fabrication. The stressed thin-film structure is insonified by an intensity modulated laser which is modeled as a Gaussian beam. The photoacoustic effects for single crystalline cubic thin-films under in-plane, uniaxial and biaxial stresses are investigated numerically. The azimuthal dependent phase velocities and attenuation factors for bulk acoustic waves and thermal waves are calculated. Variations of both are proportional to the residual stress values. Unfortunately, numerical instability occurred in solving the dispersion of thermal acoustic waves in thin-film structures. Instead, the complex-value roots of the dispersion equation for thermal acoustic Lamb waves were qualitatively discussed.
Keywords: Photoacoustic effect, Thermal acoustic wave, Residual stress, Thin-film structure
誌 謝
在此論文定稿之際,衷心感謝 尹慶中博士兩年多的殷切指導,引領桓 禎完成論文研究。同時感謝金大仁教授及蕭國模教授撥允擔任口試委員, 給予學生指正。此外,感謝工研院鄭凱宇及潘善彭學長所提供的幫助,博 班學長游泰和、王多聞、許世明、溫子逵及李雨青平日給予的建議,學長 孫繼增、黃俊傑、蔡德新、許家豪,同學陳俊宏、黃國彰,隔壁實驗室的 曾世華、鄭一烈,學弟施文斌、蘇裕為、李振良、揚炘岳的陪伴,讓桓禎 碩士班的生涯增色不少,更感謝雙親,張文賢先生與沈秀枝女士,以及胞 兄張哲禎的支持,讓桓禎在無後顧之憂下完成碩士學位。目 錄
中文摘要 i 英文摘要 ii 誌謝 iv 目錄 v 圖表目錄 vii 符號表 xi 第一章 緒論 1 1.1 研究背景 1 1.2 文獻回顧 2 1.3 內容簡述 4 第二章 具殘留應力的熱彈聲波理論 6 2.1 熱彈本構方程式 6 2.2 具殘留應力的熱彈本構方程式 7 2.2.1 殘留應力效應 7 2.2.2 座標轉換 10 2.3 具殘留應力的熱彈統御方程式 13 2.3.1 具殘留應力的運動方程式 13 2.3.2 具殘留應力的熵平衡式 15 第三章 光聲效應之波傳理論分析 17 3.1 具殘留應力立方晶體平板的熱彈波頻散方程式 17 3.1.1 克里斯多福方程式 17 3.1.2 頻散方程式 24 3.2 具殘留應力層狀介質之光聲效應 26第四章 數值分析與討論 30 4.1 熱彈波的波慢與相速度 30 4.2 立方晶體平板頻散方程式之數值模擬 32 第五章 結論與展望 34 5.1 結論 34 5.2 未來展望 34 參考文獻 36 附錄 38
圖表目錄
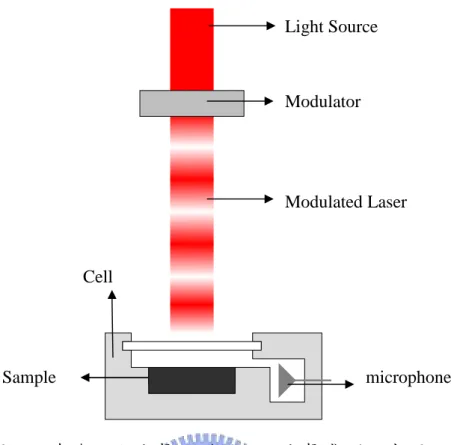
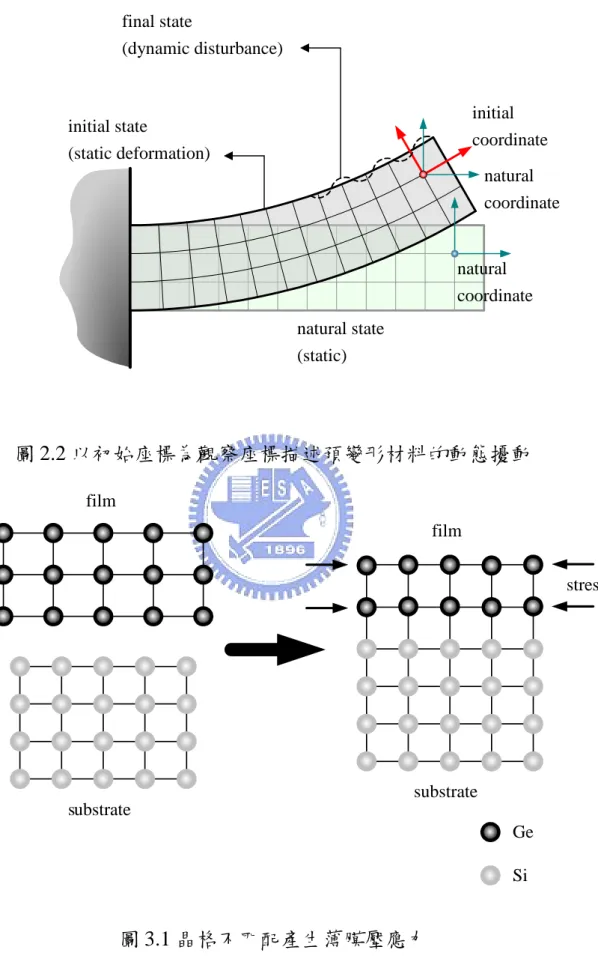
表 1 鍺的材料常數 40 表 2 矽的材料常數 40 圖 1.1 麥克風和光聲腔體搭配之光聲感測示意圖 41 圖 1.2 雷射和光電位置感測器搭配之光聲感測示意圖 41 圖 1.3 壓電換能器感測光聲效應的示意圖 42 圖 2.1 自然狀態、初始狀態、最終狀態與對應的座標系統 42 圖 2.2 以初始座標為觀察座標描述預變形材料的動態擾動 43 圖 3.1 晶格不匹配產生薄膜壓應力 43 圖 3.2 單層立方晶體平板及參考座標 44 圖 3.3 對稱與反對稱模態示意圖 44 圖 3.4 N 層半無限域材料及上邊界之高思分布熱源 45 圖 3.5 單晶矽鍺薄膜結構,參考座標與材料主軸重合 45 圖 4.1 鍺的徹體波波慢,實線代表未受應力,虛線代表σ2 =−5GPa 46 圖 4.2 鍺的徹體波波慢,實線代表未受應力,虛線代表 σ1 =σ2 =−5GPa 46 圖 4.3 鍺的熱波波慢,實線代表未受應力,虛線代表σ2 =−5GPa 47 圖 4.4 鍺的熱波波慢,實線代表未受應力,虛線代表σ1 =σ2 =−5GPa 47 圖 4.5 鍺的徹體波波慢極圖,實線代表未受應力,虛線代表 σ2 =−5GPa 48 圖 4.6 鍺的熱波波慢極圖,實線代表未受應力,虛線代表σ2 =−5GPa 48 圖 4.7 鍺的徹體波波慢極圖,實線代表未受應力,虛線代表 σ1 =σ2 =−5GPa 49 圖 4.8 鍺的熱波波慢極圖,實線代表未受應力,虛線代表 σ1 =σ2 =−5GPa 49圖 4.9 鍺[010]方向徹體波的波慢與殘留壓應力關係圖 50 圖 4.10 鍺[010]方向熱波的波慢與殘留壓應力關係圖 50 圖 4.11 鍺的徹體波相速度,實線代表未受應力,虛線代表σ2 =−5GPa 51 圖 4.12 鍺的徹體波相速度,實線代表未受應力,虛線代表 σ1 =σ2 =−5GPa 51 圖 4.13 鍺的熱波相速度,實線代表未受應力,虛線代表σ2 =−5GPa 52 圖 4.14 鍺的熱波相速度,實線代表未受應力,虛線代表 σ1 =σ2 =−5GPa 52 圖 4.15 鍺[010]方向的徹體波相速度與殘留壓應力關係圖 53 圖 4.16 鍺[010]方向的熱波相速度與殘留壓應力關係圖 53 圖 4.17 鍺的徹體波相速度極圖,實線代表未受應力,虛線代表 σ2 =−5GPa 54 圖 4.18 鍺的熱波相速度極圖,實線代表未受應力,虛線代表 σ2 =−5GPa 54 圖 4.19 鍺的徹體波相速度極圖,實線代表未受應力,虛線代表 σ1 =σ2 =−5GPa 55 圖 4.20 鍺的熱波相速度極圖,實線代表未受應力,虛線代表 σ1 =σ2 =−5GPa 55 圖 4.21 矽的徹體波波慢,實線代表未受應力,虛線代表σ2 =5GPa 56 圖 4.22 矽的徹體波波慢,實線代表未受應力,虛線代表 σ1 =σ2 =5GPa 56 圖 4.23 矽的熱波波慢,實線代表未受應力,虛線代表σ2 =5GPa 57 圖 4.24 矽的熱波波慢,實線代表未受應力,虛線代表σ1 =σ2 =5GPa 57 圖 4.25 矽的徹體波波慢極圖,實線代表未受應力,虛線代表 σ2 =5GPa 58 圖 4.26 矽的熱波波慢極圖,實線代表未受應力,虛線代表σ2 =5GPa 58
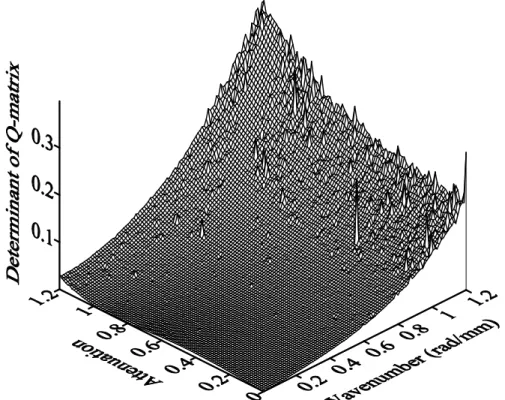
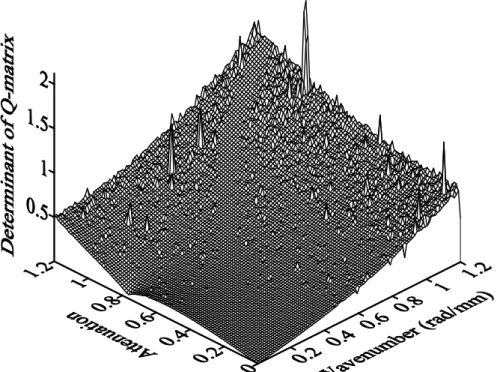
圖 4.27 矽的徹體波波慢極圖,實線代表未受應力,虛線代表 σ1 =σ2 =5GPa 59 圖 4.28 矽的熱波波慢極圖,實線代表未受應力,虛線代表 σ1 =σ2 =5GPa 59 圖 4.29 矽[010]方向的徹體波波慢與殘留拉應力關係圖 60 圖 4.30 矽[010]方向的熱波波慢與殘留拉應力關係圖 60 圖 4.31 矽的徹體波相速度,實線代表未受應力,虛線代表σ2 =5GPa 61 圖 4.32 矽的徹體波相速度,實線代表未受應力,虛線代表 σ1 =σ2 =5GPa 61 圖 4.33 矽的熱波相速度,實線代表未受應力,虛線代表σ2 =5GPa 62 圖 4.34 矽的熱波相速度,實線代表未受應力,虛線代表 σ1 =σ2 =5GPa 62 圖 4.35 矽的徹體波相速度極圖,實線代表未受應力,虛線代表 σ2 =5GPa 63 圖 4.36 矽的熱波相速度極圖,實線代表未受應力,虛線代表 σ2 =5GPa 63 圖 4.37 矽的徹體波相速度極圖,實線代表未受應力, 虛線代表σ1 =σ2 =5GPa 64 圖 4.38 矽的熱波相速度極圖,實線代表未受應力,虛線代表 σ1 =σ2 =5GPa 64 圖 4.39 矽[010]方向的徹體波相速度與殘留拉應力關係圖 65 圖 4.40 矽[010]方向的熱波相速度與殘留拉應力關係圖 65 圖 4.41 鍺受單軸及雙軸壓應力的熱波衰減值 66 圖 4.42 矽受單軸及雙軸拉應力的熱波衰減值 66 圖 4.43 鍺平板[110]波傳方向的|QS|對波數、衰減值的變化 67 圖 4.44 鍺平板在頻率為 1.6MHz 時,|QS|對波數、衰減值的關係變化 69
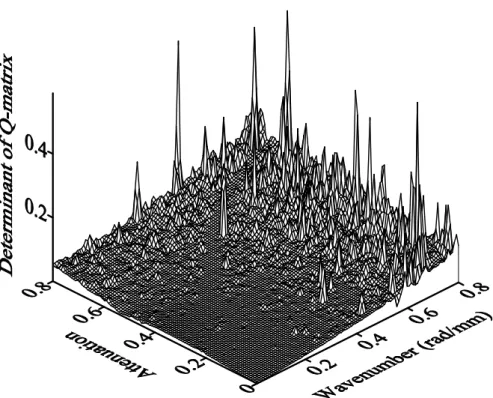
圖 4.45 同圖 4.44,但σ1 =σ2 =−5GPa 69 圖 4.46 鍺平板在頻率為 1.6MHz 時,|QA|對波數、衰減值的變化 70 圖 4.47 同圖 4.46,但σ1 =σ2 =−5GPa 70 圖 4.48 矽平板在頻率為 1.6MHz 時,|QS|對波數、衰減值的變化 71 圖 4.49 同圖 4.48,但σ1 =σ2 =5GPa 71 圖 4.50 矽平板在頻率為 1.6MHz 時,|QA|對波數、衰減值的變化 72 圖 4.51 同圖 4.50,但σ1 =σ2 =5GPa 72
符號表
αβ σ~ 應力張量 ρ 質量密度 i ρ 初始狀態的質量密度 β u 位移張量 α q 熱通量 r θ 參考溫度 η ~ 熵 t 時間 αβ E 應變張量 αβ K 熱傳導係數 θ 溫度 G 吉布士電能函數 αβγδ c 二階彈性常數 αβγδεζ c 三階彈性常數 αβ µ 熱模數 γδ α 熱膨脹係數張量 αβγδ λ 熱彈耦合高階常數 αβ ν 熱彈耦合高階常數 e C 固定應變下的比熱 1 ∈ 熱能常數 2 ∈ 熱能的高階常數 ξ 自然狀態的位置向量 X 初始狀態的位置向量x 最終狀態的位置向量 αβ σ 應力增量 i αβ σ 初始狀態應力 f αβ σ 最終狀態應力 η 熵增量 i η 初始狀態熵 f η 最終狀態熵 αβ E 應變增量 i αβ E 初始狀態應變 f αβ E 最終狀態應變 β u 位移增量 i β u 初始位移 f β u 最終位移 θ 溫度增量 i θ 初始狀態溫度 f θ 最終狀態溫度 αβγ ε permutation symbol η 基於初始座標之熵增量 IJKL C 有效彈性常數 IJ µ 有效熱模數 e C 有效熱容量 i KJ σ 柯西應力 i ε 初始體積變化率
T IJ σ 熱應力 i k Xi ( i=1,2)方向上的波數 ζ X3方向上的波數 ω 角頻率 i s Xi ( i=1,2)方向上的波慢 ς X3方向上的波慢 J U XJ (J=1,2)方向位移偏振的振幅分量 Θ 熱波振幅
第一章 緒 論
1.1 研究背景
薄膜材料具有電、磁和光等方面的特殊性質,近年來,被廣泛的應用 在許多不同的領域,尤其在超大型積體電路(VLSI)和微機電(MENS)製程 裡,薄膜材料更是一大關鍵。以薄膜材料成長或沉積的方式而言,如熱氧 化(thermal oxidation)、化學氣相沉積(chemical vapor deposition,CVD)、濺 鍍(sputtering)、蒸鍍(evaporation)等,都會使基材表面的薄膜產生殘留應力, 對半導體、微機電製程而言,殘留應力的存在容易造成薄膜元件的變形、 並減損壽命及強度。但殘留應力的存在並非完全只有負面的影響,有時反 而是個有利因素,如珠擊法(shot peening),將機械元件的表面利用珠粒(如 鋼珠)高速噴擊,使它的表面受衝擊力,而造成塑性變形產生殘留壓應力, 使表面能夠承受較大的拉伸應力,並有效抑制表面的裂紋成長,增加機械 元件的疲勞強度。對於表面聲波(surface acoustic wave,SAW)元件而言,如 果在元件內部加上殘留拉應力,能使元件的彈性常數增加,增強剛性,提 高表面聲波頻率,可應用於高頻的射頻(radio frequency,RF)元件上。為了 探究殘留應力對工業產品的影響,亟需可靠與有效的殘留應力量測方法。 過去二十多年中,光聲效應被歐、美、蘇等國家研究發掘出潛力。光 聲顯微鏡(photoacoustic microscopy,PAM)是基於固體的光聲效應,材料受 到光線照射時,吸收光能而受激發,然後通過非輻射的消除激發過程,使 吸收的光能全部或部分地轉變為熱能。如果照射的光束的強度先經過週期 性的調制(modulation),在材料內部就會產生週期性的溫度變化。溫度變化 使材料熱脹冷縮,內部的應力和應變也會產生週期性變化,產生週期性的 熱彈性(thermoelastic)變形。若利用感測器將熱彈性變形轉換為電子訊號, 其頻率與光的調制頻率相同,強度和相位則由材料本身的光學、熱學、彈
性特性及樣品的幾何形狀決定。透過鎖相(lock-in)技術可以獲得微弱的時諧 電子訊號之強度和相位訊息,藉以分析出材料內部的物理性質。光聲顯微 鏡技術的研究主要針對各種金屬、陶瓷、塑膠材料內部的熱物理性質以及 表面或次表面的微細結構,對於應力相關的研究卻寥寥無幾。若能將光聲 法拓展至量測材料內部的殘留應力,對於半導體、微機電製程等的改良, 將會是ㄧ個有利的工具。
1.2 文獻回顧
光聲成像技術若依偵測樣品熱彈效應的型式區分,可以分為接觸式及 非接觸式量測。非接觸式量測方式有兩種,參考圖 1.1 所示,以麥克風作 為感測器,量測在光聲腔體(photoacoustic cell)內試片的光聲效應;另一如圖1.2 所示,雷射和光電位置感測器(position sensitive detector,PSD)搭配的
方式來偵測表面變形。接觸式則是以壓電換能器(piezoelectric transducer)來 偵測熱彈性變形,如圖 1.3 所示。本研究模擬非接觸式偵測光聲效應,因 此不考慮感測器造成的影響。 1880 年,Bell [1]研究光聲電話(photophone),首先發現固體的光聲效 應,他將固體密封於硒晶光聲腔體(selenium cell)裡,利用聚焦太陽光間斷 的照射在光聲盒中的樣品,通過一個連接到光聲腔體上的聽筒聽到了某種 聲響。1881 年,他又和 Tyndall 和 Röntgen 相繼發現氣體和液體也有光聲效 應,進一步發現光聲訊號強度決定於物質對光的吸收率。 1976 年,Rosencwaing 和 Gersho [2]利用調制光束照射透明及非透明固 體,推導在光聲腔體內垂直樣品表面一維壓力變化的光聲效應方程式,光 聲腔體假設為絕熱。計算的結果顯示改變光束的調制頻率可變化熱擴散長 度,光聲訊號的強度與光吸收係數、熱擴散長度成正比。
量測矽晶圓(SiO2)基材和基材上鎳薄膜的熱擴散係數,無論試片的表面性質
為粗糙成或光滑,由光聲訊號的強度變化,皆能成功量測出基材的熱擴散 係數,且與理論值相近。
1974 年,Mindlin [4]曾分析線性範圍內的熱壓電晶體平板之位移、電 壓與溫度變化,以吉布士自由能(Gibbs free energy)推導熱壓電晶體本構方
程式,再推導出熱壓電晶體板的振動方程式。在2002 年,Altay 和 Dökmeci
[5-6]進一步將 Mindlin 熱壓電方程式中的位移高階項,分別應用於一維熱壓 電桿及二維熱壓電薄殼的振動理論推導。
1967 年,Lord 和 Shulman [7]研究動態熱彈理論(dynamical theory of thermoelasticity),發現在分析動態熱彈現象時,熱傳方程式若只考慮古典 的傅立葉熱傳導(Fourier law of heat conduction),波傳速度上會產生誤差。 因此考慮非傅立葉(non-Fourier)熱傳導效應,在古典的熱傳導式子裡加入一 個熱弛緩時間(thermal relaxation time)做修正。1972 年,Green 和 Linsay [8]
為了減少動態熱彈理論上的誤差,於能量方程式及Duhamel-Neumann 熱彈
性定律中也導入二個熱弛緩時間做修正。
1974 年,Banerjee 和 Pao[9]研究接近絕對零度時,在非等向性固體傳 遞的熱彈波(thermoelastic wave),在熱彈連體理論中,考慮熱聲子弛緩效應 (effect of thermal phonon relaxation),發現熱彈波共有四個波速,其中三個 近似於等溫絕熱條件下的彈性波,另一個則為熱波(thermal wave),表示固 體內的溫度擾動。 2001 年,Wang 和 Xu [10]依據 Lord-Shulman[7]的動態熱彈理論,研究 脈衝雷射照射固體產生的熱彈波(thermoelastic wave),以數值模擬不同脈衝 時間的雷射生成熱彈波的差異,並比較傅立葉與非傅立葉熱傳導的影響, 結果顯示,考慮非傅立葉熱傳導效應,固體的表面溫度更高,而彈性波強 度較弱,但脈衝雷射時間須在幾十皮秒(ps)、甚至是幾十飛秒(fs)的情況下,
非傅立葉熱傳導對結果才會有較顯著的影響。目前研究非傅立葉熱傳效應 的領域,主要都是圍繞在低溫凝態物質或是短脈衝加熱的情況,對光聲效 應而言,加熱時間遠長於幾十皮秒的短脈衝雷射,因此非傅立葉熱傳效應 的影響十分有限。 2002 年和 2006 年,Verma [11-12]利用 Lord-Shulman[7]的非傅立葉熱 傳效應,分別推導非等向性層狀結構之熱彈理論,探討層狀結構的縱波、 熱波波速與熱弛緩時間的關係,發現不論是採用熱彈耦合理論或古典理 論,剪力波皆不受熱變化的影響。
2005 年,Singh [13]根據 Lord-Shulman[7]與 Green-Linsay[8]的熱彈理論 做基礎,分別推導固體等向性材料的二維熱彈方程式,探討平面波反射係 數與熱能、擴散參數之間的關係。
1984-1985 年,Pao et al [14]及 Pao 與 Gamer [15]依據物體受力狀態, 描述具殘留應力之物理模型,建立殘留應力的聲彈理論(acoustoelasticity)。 發現在軸向對稱的介質中,由於初始應變的影響,造成剪力波產生雙折射 現象,且兩剪力波的波速差與兩應力主軸的應力差有關。 2000 年,Osetrov et al [16]依據 Pao et al [14]建立之徹體波聲彈理論, 以傳遞矩陣法(transfer-matrix method)計算矽鍺薄膜結構殘留應力的聲彈效 應,模擬在[100]及[110]方向傳遞的拉芙波(Love wave)相速度與殘留應力之 間的關係。
1.3 內容簡述
本研究以熱彈耦合理論(theory of coupled thermoelasticity)探討光聲效 應的生成機制,並分析具殘留應力的薄膜材料對光聲效應之影響。內容共 分四章。
布士自由能做基礎,忽略電性部分,推導熱彈本構方程式。繼而參考 Pao 和 Gamer [14]的殘留應力聲彈理論,將熱彈模型依受力情形區分為自然狀 態、初始狀態與最終狀態不同狀態討論,座標系統也以相同方式區分,透 過座標轉換導出預殘留應力之熱彈本構方程式。 第三章考慮以 Lagrangian 座標表示的運動方程式及熵平衡(balance of entropy)方程式,將預殘留應力之熱彈本構方程式代入,推導出具殘留應力 的熱彈統御方程式,參考Verma [10-11]將位移及溫度變化假設為時諧行進
波(time-harmonic traveling wave)。此外,將調制雷射光假設為時諧之高斯能 束(Gaussian beam)照射於試片表面上,以層狀介質之波傳理論來進行分析。 第四章為本研究的模擬結果與討論,而第五章為本文的結論與展望。
第二章 具殘留應力的熱彈聲波理論
光聲效應是調制雷射光照射試體,試體吸收調制雷射的輻射熱後,部 分熱能引起體積熱膨脹產生熱彈聲波,其餘則由試體吸收產生溫度變化, 若以感測訊號作區分,前者為交流(AC)訊號,後者為直流(DC)訊號。本章
將以熱彈耦合理論為基礎探討光聲效應,並以 Pao et al [14]及 Pao 與 Gamer
[15]的方法為經緯,進一步推導具殘留應力的熱彈聲波理論。
2.1 熱彈本構方程式
在熱彈耦合理論中,應力、位移、熵及溫度之間存有相互作用,彈性 與熱的散度方程式(divergence equations)[17]表示為 , u ~ 2 β 2 t ρ ξ σ α αβ ∂ ∂ = ∂ ∂ t η θ ξ q r α α ∂ ∂ − = ∂ ∂ ~ (2.1) 其中σ~ 為應力張量, ρ 為質量密度,αβ u 為位移張量,β qα為熱通量(heat flux),θr為參考溫度,η~ 為熵(entropy),t 為時間。彈性與熱的梯度方程式 (gradient equations)[17]表示為 u u , 2 1 Eαβ α β ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ∂ ∂ + ∂ ∂ = α β ξ ξ qα Kαβ ∂ξβ ∂ − = θ (2.2) 其中前者代表應變張量E 的定義,後者為傅立葉熱傳導方程式,αβ K 為熱αβ 傳導係數,θ表示溫度。熱彈本構方程式與吉布士電能函數的關係為 , E ~ αβ ∂ ∂ = G σαβ θ ~ ∂ ∂ − = G η (2.3) 其中G為吉布士電能函數,考慮熱與彈性耦合,表示如下: 3 2 2 1 2 αβ αβ γδ αβ εζ γδ αβ γδ αβ θ 3! 1 θ ! 2 1 θ E ! 2 1 θ E θ E E ! 2 1 E E E 3! 1 E E ! 2 1 ∈ − ∈ − − − − + = αβ αβ αβγδ αβγδεζ αβγδ ν µ λ c c G (2.4)其 中cαβγδ 為 二 階 彈 性 常 數 ,cαβγδεζ 為 三 階 彈 性 常 數(third-order elastic
constants),µαβ為熱模數(thermal moduli),µαβ =cαβγδαγδ,αγδ為熱膨脹係數
張量(thermal expansion tensor),λαβγδ為應變二次與溫度一次的高階熱彈耦合
常數,ναβ為應變一次與溫度二次的高階熱彈耦合常數,∈1= ρCe θ0,Ce為
固定應變下的比熱(specific heat at constant strain),∈2為熱能的高階常數。
將(2.4)代回(2.3),可得熱彈本構方程式為 γδ γδ εζ γδ θ2 2 1 θ θ E E E 2 1 E ~ αβ αβ αβγδ αβγδεζ αβγδ αβ c c λ µ ν σ = + − − − (2.5a) E E E E θ 2 1 θ 2 1 θ ~ αβ αβ γδ αβ 2 2 1 λαβγδ µαβ ναβ η =∈ + ∈ + + + (2.5b)
2.2 具殘留應力的熱彈本構方程式
依試體受力情況區分為三種系統狀態,參考圖 2.1 所示,系統在無應 力和應變的自然狀態(natural state);系統受殘留應力產生預變形的初始狀態 (initial state),以上標符號 i 表示;以及系統受其他動態擾動的最終狀態(final state),以上標符號 f 表示。座標系統採 Eulerian 座標系,依狀態劃分,在 自 然 狀 態 下 為 自 然 座 標(natural coordinates) , 以 羅 馬 字 母 的 下 標 符 號 3 2 1 ,, α,β,γ = 表示;在初使狀態下為初始座標(initial coordinates),以大寫英文 字 母 的 下 標 符 號 I,J,K =1 ,,23表 示 ; 在 最 終 狀 態 下 則 為 最 終 座 標(final coordinates),以小寫英文字母的下標符號i,j,k =1 ,,23表示,而ξ 、 X 和 x 分 別代表自然狀態、初始狀態、最終狀態的位置向量。 2.2.1 殘留應力效應 探討具殘留應力介質受到微小的擾動,是以初始狀態為基準,觀察最 終狀態的變化,先各別考慮系統的初始狀態及最終狀態,由圖 2.1 可知 ξ X ui = − ,uf =x−ξ,則初始狀態和最終狀態的位置梯度可分別表示為α i J Jα α J ξ u δ ξ X ∂ ∂ + = ∂ ∂ (2.6a) α f j jα α j ξ u δ ξ x ∂ ∂ + = ∂ ∂ (2.6b)
其中δjα為Kronecker delta。根據Lagrangian應變的定義,初始應變和最終
應變可表示為 ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − ∂ ∂ ∂ ∂ = αβ β J α J i αβ δ ξ X ξ X E 2 1 (2.7a) ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − ∂ ∂ ∂ ∂ = αβ β j α j f αβ ξ δ x ξ x E 2 1 (2.7b) 由(2.6)和(2.7),可將初始和最終應變以位移梯度(displacement gradient)表示 為 Eαβi (δαγδβδ δβγδαδ δαδuγ,βi )uγ,δi 2 1 + + = (2.8a) Eαβf (δαγδβδ δβγδαδ δαδuγ,βf )uγ,δf 2 1 + + = (2.8b) 由(2.5a),初始狀態和最終狀態的應力分別為 2 2 1 2 1 i αβ i αβ i i γδ αβγδ i εζ i γδ αβγδεζ i γδ αβγδ i αβ c E c E E λ E θ µ θ ν θ σ = + − − − (2.9a) 2 2 1 2 1 f αβ f αβ f f γδ αβγδ f εζ f γδ αβγδεζ f γδ αβγδ f αβ c E c E E λ E θ µ θ ν θ σ = + − − − (2.9b) 由(2.5b),初始狀態和最終狀態的熵分別為 ηi =∈ θi+ ∈ θi + λαβγδEαβi Eγδi +µαβEαβi +ναβEαβi θi 2 1 2 1 2 2 1 (2.10a) ηf =∈ θf+ ∈ θf + λαβγδEαβf Eγδf+µαβEαβf +ναβEαβf θf 2 1 2 1 2 2 1 (2.10b) 由初始狀態觀察最終狀態的動態擾動,所觀察的相對位移稱為位移增量 (incremental displacement),表示如下:
u=uf −ui (2.11) 相對的溫度則稱為溫度增量(incremental temperature),表示為 θ =θf −θi (2.12) 相對的應變稱為應變增量(incremental strains),表示為 Eαβ =Eαβf −Eαβi (2.13) 將(2.8)和(2.11)代入(2.13),考慮微小變形(u<< )ui ,忽略位移增量的高次乘 積項(uα,βuγ,δ ≈0),可將應變增量以位移梯度表示為 Eαβ (δαγδβδ δβγδαδ δαδuγ,β δαδuγ,βi δβδuγ,αi )uγ,δ 2 1 + + + + = (2.14) 相對的應力變化稱為應力增量(incremental stresses),表示為 σαβ =σαβf −σαβi (2.15) 由(2.9)及(2.12)~(2.15),可將應力增量改以位移梯度表示如下: i αβ αβ i κ,λ αβκλ i κ,λ αβκλ i µ,ν κ,λ αβκλµν κ,λ i κ,γ αβγλ κ,λ αβκλ αβ θθ ν θ µ θ u λ θ u λ u u c u u c u c σ − − − − + + = (2.16) 同理,相對的熵變化稱為熵增量(incremental entropy),表示為 η=ηf −ηi (2.17) 由(2.10)~(2.14)及(2.17),可將熵增量改以位移梯度表示如下: θ u ν θ u ν u u µ u µ u u θθ θ η i κ,λ κλ i κ,λ κλ κ,λ i κ,β λβ κ,λ κλ i µ,ν κ,λ κλµν i + + + + λ + ∈ + ∈ = 1 2 (2.18) (2.16)與(2.18)合稱為殘留應力的熱彈本構方程式(基於自然座標),經化簡表 示為 σ c u µo θ αβ γ,δ o αβγδ αβ = − (2.19a) η= µαβ∗ uα,β+∈∗ θ (2.19b) 其中各項係數為
cαβγδo =cαβγδ +cαβλδuγ,λi +cαβγδεζuε,ζi − λαβγδθi (2.20a) µαβo = λαβγδuiγ,δ + µαβ +ναβθi (2.20b) µαβ∗ = λαβγδuiγ,δ + µαβ + µβνuα,νi +ναβθi (2.20c) ∈∗=∈ +∈ θi +ναβuα,βi 2 1 (2.20d) 2.2.2 座標轉換 參考圖 2.2 所示,偵測預變形材料的動態擾動是以初始狀態和初始座 標為基準。(2.19)雖然是描述初始狀態至最終狀態的變化,卻是以自然座標 描述,因此需進行座標轉換,由自然座標轉為初始座標。依據N 階張量座 標轉換之定義 3 2 1 4 4 4 3 4 4 4 2 1 3 2 1 order order 1 order det N δ ... αβγ N δ L γ K β J α I N L ... IJK. ξ X ... ξ X ξ X ξ X ξ X ℜ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ∂ ∂ = ℜ − (2.21) 其中ℜIJK....L為基於初始座標的 N 階張量,ℜαβγ...δ為基於自然座標的 N 階 張量。利用(2.21),可將2nd Piola-Kirchhoff應力張量予以進行座標轉換,應 力張量屬於2階張量,初始座標與自然座標的應力增量關係為 αβ β J α I IJ σ ξ X ξ X σ ∂ ∂ ∂ ∂ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ξ ∂ ∂ = −1 X det (2.22) 純量屬於0階張量,根據(2.21)的張量定義,初始座標與自然座標的熵增量 關係為 η ξ X 1 det η − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ∂ ∂ = (2.23) 其中det(∂X/∂ξ)的定義為 3 2 1 3 2 1 ξ X det ξ X ξ X ξ X ε ξ X ξ X ξ X ε I J K IJK γ β α αβγ ∂ ∂ ∂ ∂ ∂ ∂ = ∂ ∂ ∂ ∂ ∂ ∂ = ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ∂ ∂ (2.24)
3 3 2 2 1 1 2 2 1 1 1 1 3 3 3 3 2 2 3 3 2 2 1 1 1 ξ X det ξ u ξ u ξ u ξ u ξ u ξ u ξ u ξ u ξ u ξ u ξ u ξ u i i i i i i i i i i i i ∂ ∂ ∂ ∂ ∂ ∂ + ∂ ∂ ∂ ∂ + ∂ ∂ ∂ ∂ + ∂ ∂ ∂ ∂ + ∂ ∂ + ∂ ∂ + ∂ ∂ + = ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ∂ ∂ (2.25) 若僅考慮線性部分,忽略初始位移梯度兩次以上乘積項( i ≈0 γ,δ i α,βu u ),(2.25) 近似為 ν i ν ξ u ∂ ∂ + ≈ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ∂ ∂ 1 ξ X det (2.26) (2.26)中∂uiν/∂ξν <<1,因此det(∂X/∂ξ)−1近似為 ν i ν ξ u ∂ ∂ − ≈ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ∂ ∂ − 1 ξ X det 1 (2.27) 將(2.6a)及(2.27)代回(2.22)及(2.23),可獲得 ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ ∂ ∂ + ∂ ∂ + ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ∂ ∂ − = βδ δ i α αγ γ i β αβ ν i ν Jβ Iα IJ σ ξ u σ ξ u σ ξ u δ δ σ 1 (2.28a) η ξ u ν i ν ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ∂ ∂ − = 1 η (2.28b) 根據(2.16)及(2.18),可將(2.28)改以位移梯度表示 θ ξ u θ ν µ ξ u θ ν µ ξ u λ θ ν µ ξ u δ δ ξ u ξ u θ λ c ξ u θ λ c ξ u c ξ u c θ λ c ξ u δ δ σ λ i α i βλ βλ κ i β i ακ ακ δ i γ αβγδ i αβ αβ ν i ν Jβ Iα δ γ λ i α i βλγδ βλγδ κ i β i ακγδ ακγδ ζ i ε αβγδεζ µ i γ αβµδ i αβγδ αβγδ ν i ν Jβ Iα IJ ⎥ ⎦ ⎤ ∂ ∂ + + ∂ ∂ + + ∂ ∂ + + ⎢ ⎣ ⎡ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ∂ ∂ − − ∂ ∂ ⎥ ⎦ ⎤ ∂ ∂ − + ∂ ∂ − + ∂ ∂ + ∂ ∂ + − ⎢ ⎣ ⎡ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ∂ ∂ − = ) ( ) ( ) ( 1 ) ( ) ( ) ( 1 (2.29a)
⎥ ⎥ ⎦ ⎤ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ∂ ∂ + ∈ + ∈ + ∂ ∂ ⎢ ⎢ ⎣ ⎡ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + ∂ ∂ + + ∂ ∂ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ∂ ∂ − = θ ξ u ν θ ξ u θ ν ξ u µ µ ξ u λ ξ u β i α αβ i β α i αβ ν i α βν αβ δ i γ αβγδ ν i ν 2 1 1 η (2.29b) 考慮位移梯度之座標轉換 J I Jβ Iα β α ξ u δ δ ξ u ∂ ∂ = ∂ ∂ , J i I Jβ Iα β i α ξ u δ δ ξ u ∂ ∂ = ∂ ∂ (2.30) 根據(2.6a),∂uI/∂ξJ及∂uIi/∂ξJ可近似為 J i M M I J I J I X u X u X u ξ u ∂ ∂ ∂ ∂ + ∂ ∂ ≈ ∂ ∂ , J i M M i I J i I J i I X u X u X u ξ u ∂ ∂ ∂ ∂ + ∂ ∂ ≈ ∂ ∂ (2.31) 由(2.30)及(2.31),可獲得 ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ∂ ∂ ∂ ∂ + ∂ ∂ ≈ ∂ ∂ J i K K I J I Jβ Iα β α X u X u X u δ δ ξ u , ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ∂ ∂ ∂ ∂ + ∂ ∂ ≈ ∂ ∂ J i K K i I J i I Jβ Iα β i α X u X u X u δ δ ξ u (2.32b) 將(2.32)代回(2.29),得到初使座標下之具殘留應力的熱彈本構方程式為 θ X u λ θ ν X u µ X u µ X u µ µ X u θ λ X u c X u c X u c X u c X u c X u c c σ N i M IJMN i IJ N i I NJ N i J IN N i N IJ IJ L k i IJKL N i L IJKN N i I NJKL N i J INKL N i M IJKLMN N i K IJNL N i N IJKL IJKL IJ ⎟⎟ ⎠ ⎞ ∂ ∂ + + ∂ ∂ + ∂ ∂ + ⎜⎜ ⎝ ⎛ ∂ ∂ − − ∂ ∂ ⎟⎟ ⎠ ⎞ − ∂ ∂ + ∂ ∂ + ∂ ∂ + ∂ ∂ + ∂ ∂ + ⎜⎜ ⎝ ⎛ ∂ ∂ − = (2.33a) θ X u ν θ X u X u X u λ θ ν X u µ X u µ X u µ µ J i I IJ i N i N J I L i K IJKL i IJ N i J IN N i I NJ N i N IJ IJ ⎟⎟ ⎠ ⎞ ∂ ∂ + ∈ + ⎜⎜ ⎝ ⎛ ∂ ∂ ∈ + ∈ + ∂ ∂ ⎟⎟ ⎠ ⎞ ∂ ∂ + + ∂ ∂ + ∂ ∂ + ⎜⎜ ⎝ ⎛ ∂ ∂ + = 2 1 1 η (2.33b)
(2.33)透過化簡表示如下: µ θ X u C σ IJ L k IJKL IJ − ∂ ∂ = (2.34a) θ X u µ J I IJ +∈ ∂ ∂ = η (2.34b)
其中CIJKL為有效彈性常數(effective elastic constants)
i IJKL N i L IJKN N i I NJKL N i J INKL N i M IJKLMN N i K IJNL N i N IJKL IJKL IJKL θ λ X u c X u c X u c X u c X u c X u c c C − ∂ ∂ + ∂ ∂ + ∂ ∂ + ∂ ∂ + ∂ ∂ + ∂ ∂ − = (2.35a) IJ
µ 是有效熱模數(effective thermal moduli)
L i K IJKL i IJ N i I NJ N i J IN N i N IJ IJ IJ X u λ θ ν X u µ X u µ X u µ µ µ ∂ ∂ + + ∂ ∂ + ∂ ∂ + ∂ ∂ − = (2.35b) i o e θ C ρ =
∈ ,其中C 為有效熱容量(effective heat capacity),e ∈則可表示為
J i I IJ N i N i i N i N X u ν X u θ θ X u ∂ ∂ + ∂ ∂ ∈ − ∈ + ∂ ∂ ∈ − =∈ ∈ 1 1 2 2 (2.35c)
2.3 具殘留應力的熱彈統御方程式
熱彈統御方程式由運動方程式及熵平衡式組成。運動方程式描述系統 的力平衡,其中包含徹體力(body force),但彈性波位移擾動很小,徹體力 作功遠小於應變能和動能,因此將徹體力忽略不計。熵平衡式中也含有熱 源的熵生成(entropy generation),但熱源僅在試體表面加熱,所以統御方程 式中不考慮熱源,而是以邊界條件來考慮。 2.3.1 具殘留應力的運動方程式 同 2.2 節觀念,具殘留應力的運動方程式即是相對於初始狀態及初始 座標的運動方程式。由圖2.1 所示,可知xJ(X,t)= XJ +uJ(X,t) (2.36) 將(2.36)對初始座標X 偏微分得 L L J JL L J X u δ X x ∂ ∂ + = ∂ ∂ (2.37) 將(2.36)對時間偏微分兩次,可得初始座標系描述之加速度, 2 2 2 2(X,t) (X,t) t x t uJ J ∂ ∂ = ∂ ∂ (2.38) 最終狀態的運動方程式為 i J L J f KL K x ρ X x σ X ⎟⎠= && ⎞ ⎜ ⎝ ⎛ ∂ ∂ ∂ ∂ (2.39) 由(2.36)~(2.39),可獲得以位移梯度表示之最終狀態運動方程式, i J L J f KL f JK K u ρ X u σ σ X ⎟⎠= && ⎞ ⎜ ⎝ ⎛ ∂ ∂ + ∂ ∂ (2.40) 在初始狀態下,殘留應力屬於靜態平衡,試體呈現靜止狀態,即 0 = J X&& ,則初始狀態的運動方程式為 = =0 ∂ ∂ J i K i KJ ρ X X σ && (2.41) 其中σ 為柯西應力(Chauchy stress)張量。考慮相對於初始狀態的運動方程KJi 式,將(2.40)減去(2.41),可獲得 i J L J f KL i JK f JK K u ρ X u σ σ σ X ⎟⎠= && ⎞ ⎜ ⎝ ⎛ ∂ ∂ + − ∂ ∂ (2.42) 基於初始座標的2nd Piola-Kirchhoff 應力增量為 σJK =σJKf −σiJK =σJKf −σJKi (2.43) (2.43)對初始座標X 偏微分,移項後得 L K JK K i JK K f JK X σ X σ X σ ∂ ∂ − ∂ ∂ = ∂ ∂ (2.44) 將(2.43)及(2.44)代回(2.42),獲得具殘留應力的運動方程式,
i J L J KL i KL JK K u ρ X u σ σ σ X ⎥⎦= && ⎤ ⎢ ⎣ ⎡ ∂ ∂ + + ∂ ∂ ( ) (2.45) 由於僅考慮微小擾動,σKL <<σiKL,uJ <<uiJ,因此忽略應力增量和位 移增量梯度的乘積項( ≈0 ∂ ∂ L J KL X u σ ),則(2.45)具殘留應力的運動方程式可改 寫為 i J L J i KL JK K u ρ X u σ σ X ⎟⎠= && ⎞ ⎜ ⎝ ⎛ ∂ ∂ + ∂ ∂ (2.46) 2.3.2 具殘留應力的熵平衡式 為了描述具殘留應力試體中的熱變化,熵的平衡方程式仍以最終狀態 相對於初始狀態來考慮。利用Lagrangian 表示的熵平衡方程式可寫為 t θ X q I I ∂ ∂ − = ∂ ∂ η 0 (2.47) 將傅立葉熱傳導方程式(2.2b)等號兩端對於空間座標一次微分,則 J I IJ I I X X θ K X q ∂ ∂ ∂ − = ∂ ∂ (2.48) 由(2.47)及(2.48),可獲得 J I IJ X X θ K t θ ∂ ∂ ∂ = ∂ ∂η 0 (2.49) 其中θ 是絕對參考溫度,即0 θ0 =θ +θref +273 ,θ 是周圍環境的攝氏溫ref 度。根據(2.49),初始狀態的熵平衡方程式表示為 0 η =0 ∂ ∂ ∂ = ∂ ∂ J I i IJ i i X X θ K t θ (2.50) 其中θ0i是絕對初始溫度,即θ0i =θi +θref +273。同理,最終狀態的熵平衡 式表示為
J I f IJ f f X X θ K t θ ∂ ∂ ∂ = ∂ ∂η 0 (2.51) 其中θ0f 是絕對最終溫度,即θ0f =θf +θref +273。考慮相對於初始狀態的 熵平衡方程式,將(2.51)減去(2.50),可獲得具殘留應力的熵平衡方程式, J I IJ i i X X θ K t θ θ t θ ∂ ∂ ∂ = ∂ ∂ + + ∂ ∂ η ) ( η 0 (2.52) 因為初始狀態的熵是屬於靜態的(∂ηi ∂t=0),且初始絕對溫度遠大於溫度 增量(θ0i >>θ),所以θ0i +θ ≈θ0i,則(2.52)具殘留應力的熵平衡式可改寫為 J I IJ i X X θ K t θ ∂ ∂ ∂ = ∂ ∂η 0 (2.53)
第三章 光聲效應之波傳理論分析
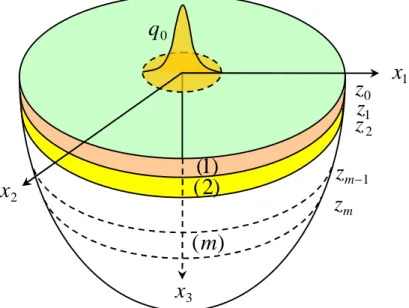
光聲效應是由週期性的局部加熱生成時諧的熱波(thermal wave)及彈性 波,藉由具殘留應力的熱彈統御方程式建立其物理模型,邊界條件考慮試 體表面為自由表面,且調制雷射光假設為熱源。考慮試體為薄膜材料,以 層狀介質熱彈波傳理論探討薄膜結構殘留應力的光聲效應。3.1 具殘留應力立方晶體平板的熱彈波頻散方程式
參考圖 3.1 所示,在本文考慮的材料中,矽與鍺皆為立方晶體材料(cubic material),由於兩種材料的晶格常數不同,造成矽鍺薄膜結構因為異質界面 晶格不匹配(lattice misfit)而產生預應力,假設預應力是延材料主軸方向的正 向應力,且不具剪應力,依據第二章殘留應力的熱彈耦合理論,可得到材 料的有效常數。 本節將以藍姆波的型態,先探討受預應力之單層立方晶體平板的熱彈 波波傳,熱性之邊界條件不考慮任何加熱源,求出齊次解(homogeneous solution)和頻散方程式。 3.1.1 克里斯多福方程式 參考圖 3.2 所示,考慮三維物理模型,將具殘留應力的熱彈本構方程 式(2.34)代入(2.45)及(2.52),可將具殘留應力的熱彈統御方程式表示為 i J K J i IK IJ L k IJKL I u ρ X u σ θ µ X u C X ⎟⎠= && ⎞ ⎜ ⎝ ⎛ ∂ ∂ + − ∂ ∂ ∂ ∂ (3.1a) J I IJ J I IJ i X X θ K t θ t X u µ θ ∂ ∂ ∂ = ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ∂ ∂ ∈ + ∂ ∂ ∂ 0 (3.1b) 考慮(3.1)中各項材料常數,立方晶體材料在自然狀態下的彈性常數為⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ 66 55 44 33 23 13 23 22 12 13 12 11 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 c c c c c c c c c c c c (3.2) 假設試體中的殘留應力為均勻分布之正向應力,且不具剪應力,則初 始應力與初始應變的關係可表示為 ⎪ ⎭ ⎪ ⎬ ⎫ ⎪ ⎩ ⎪ ⎨ ⎧ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎪ ⎭ ⎪ ⎬ ⎫ ⎪ ⎩ ⎪ ⎨ ⎧ i , i , i , i i i u u u c c c c c c c c c σ σ σ 3 3 2 2 1 1 33 3 2 13 3 2 22 2 1 13 2 1 11 33 22 11 (3.3) 立方晶體的三階彈性常數共有六個,表示如下: c , 123 c456, c111 =c222 =c333, c144 =c255 =c366, (3.4) c112 =c223 =c133 =c113 =c122 =c233, c166 =c155 =c244 =c344 =c266 =c355 三階彈性常數具對稱性質,因此
cIJK =cKIJ =cJKI (3.5)
具殘留應力效應之有效彈性常數可由(2.35a)、(3.2)~(3.5)式計算獲得,若忽 略高階熱彈耦合常數(λIJ =0),則有效彈性常數可表示為 ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ 66 55 44 33 23 13 23 22 12 13 12 11 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 C C C C C C C C C C C C (3.6) 其中各項展開如下:
3 3 2 11 2 2 112 1 1 111 11 11 11 (1 ) (4 ) X u c X u c X u c c ε c C i i i i ∂ ∂ + ∂ ∂ + ∂ ∂ + + − = (3.7a) 3 3 112 2 2 111 22 1 1 112 22 22 (1 ) (4 ) X u c X u c c X u c ε c C i i i i ∂ ∂ + ∂ ∂ + + ∂ ∂ + − = (3.7b) 3 3 111 33 2 2 2 11 1 1 112 33 33 (1 ) (4 ) X u c c X u c X u c ε c C i i i i ∂ ∂ + + ∂ ∂ + ∂ ∂ + − = (3.7c) 3 3 166 44 2 2 166 44 1 1 144 44 44 (1 ) (2 ) (2 ) X u c c X u c c X u c ε c C i i i i ∂ ∂ + + ∂ ∂ + + ∂ ∂ + − = (3.7d) 3 3 166 55 2 2 144 1 1 166 55 55 55 (1 ) (2 ) (2 ) X u c c X u c X u c c ε c C i i i i ∂ ∂ + + ∂ ∂ + ∂ ∂ + + − = (3.7e) 3 3 144 2 2 166 66 1 1 66 1 66 66 66 (1 ) (2 ) (2 ) X u c X u c c X u c c ε c C i i i i ∂ ∂ + ∂ ∂ + + ∂ ∂ + + − = (3.7f) 3 3 12 1 23 2 2 2 11 23 1 1 123 23 23 (1 ) (2 ) (2 ) X u c c X u c c X u c ε c C i i i i ∂ ∂ + + ∂ ∂ + + ∂ ∂ + − = (3.7g) 3 3 12 1 13 2 2 3 12 1 1 12 1 3 1 3 1 3 1 (1 ) (2 ) (2 ) X u c c X u c X u c c ε c C i i i i ∂ ∂ + + ∂ ∂ + ∂ ∂ + + − = (3.7h) 3 3 3 2 1 2 2 2 1 1 12 1 1 12 1 2 1 2 1 2 1 (1 ) (2 ) (2 ) X u c X u c c X u c c ε c C i i i i ∂ ∂ + ∂ ∂ + + ∂ ∂ + + − = (3.7i) (3.7)中εi表示初始體積變化率,定義為 3 3 2 2 1 1 X u X u X u ε i i i i ∂ ∂ + ∂ ∂ + ∂ ∂ = (3.8) 熱彈耦合由熱膨脹引起,以彈性力學觀點而言,熱模數是描述熱應力 與溫度變化的關係, σTIJ =µIJθ =cIJKLαKLθ (3.9) 其中σ 為熱應力,TIJ µ 為自然狀態的熱模數,IJ α 為熱膨脹係數(thermal KL expansion coefficients)。若立方晶體材料受熱後產生等向性(isotropic)的熱膨 脹,熱膨脹係數表示為
⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = α α α αKL 0 0 0 0 0 0 (3.10) 依據(2.35b)、(3.9)與(3.10),忽略應變一次與溫度二次的高階熱彈耦合常數 (νIJ =0),有效熱模數可表示為 ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = 33 22 11 0 0 0 0 0 0 µ µ µ µIJ (3.11) 其中各項展開如下: 1 1 11 11 11 (1 ) 2 X u α c ε α c µ i i ∂ ∂ + − = (3.12a) 2 2 22 22 22 (1 ) 2 X u α c ε α c µ i i ∂ ∂ + − = (3.12b) 3 3 33 33 33 (1 ) 2 X u α c ε α c µ i i ∂ ∂ + − = (3.12c) 材料的熱性質描述材料吸收熱能後溫度的變化和分布,依據熱容量的 定義,在溫度變化未造成材料相變化(phase transition)的前提下,吸收熱量 與溫度變化的關係為 Q= ρCeθ (3.13) 其中Q 為吸收的熱量。根據(2.35c),並忽略高階常數(∈2=νIJ =0),則 (1 ) 0 0 i N,N i e i i e i u θ C ρ θ C ρ − = = ∈ (3.14) 材料吸收熱量後溫度的擴散和分布屬於熱傳導性質,參考傅立葉熱傳 導方程式(2.2b),假設立方晶體材料的熱傳導性質屬於等向性,則熱傳導係 數表示為
⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = K K K KIJ 0 0 0 0 0 0 (3.15) 在光聲效應的研究中,所使用的熱源是調制雷射,使試體受週期性加 熱,並以鎖相技術偵測所引起的溫度變化和熱膨脹,因此考慮位移場和溫 度場具時諧因子(time-harmonic factor)e−ωt,表示如下: uJ(X1,X2,X3,t)=UJ exp[i(k1X1 +k2X2 +ζX3 −ωt)] (3.16a) θ(X1,X2,X3,t)=Θexp[i(k1X1 +k2X2 +ζX3 −ωt)] (3.16b) 其中k 、1 k 、ζ 分別為2 X 、1 X 、2 X 方向的波數(wavenumber),且3 k1 =ωs1、 2 2 ωs k = 、ζ =ως,s 、1 s 、ς 分別為2 X ,1 X ,2 X 方向上的波慢(slowness), 3 ω 為角頻率(angular frequency),U 為J X 方向位移偏振的振幅分量,Θ 為J 熱波振幅。將各項材料常數(3.6)、(3.11)、(3.14)和(3.15)代入統御方程式(3.1) 中,並考慮時諧因子(3.16),可將統御方程式展開如下: Θ k µ i U ζ k C ζ k C U k k C k k C U ζ σ k σ k σ ζ C k C k C U ω ρi i i i 1 11 3 1 55 1 13 2 2 1 66 2 1 12 1 2 33 2 2 22 2 1 11 2 55 2 2 66 2 1 11 1 2 ) ( ) ( ) ( + + + + + + + + + + = (3.17a) Θ k µ i U ζ k C ζ k C U ζ σ k σ k σ ζ C k C k C U k k C k k C U ω ρ i i i i 2 22 3 2 44 2 23 2 2 33 2 2 22 2 1 11 2 44 2 2 22 2 1 66 1 2 1 21 2 1 66 2 2 ) ( ) ( ) ( + + + + + + + + + + = (3.17b) ζΘ µ i U ζ σ k σ k σ ζ C k C k C U ζ k C ζ k C U ζ k C ζ k C U ω ρ i i i i 33 3 2 33 2 2 22 2 1 11 2 33 2 2 44 2 1 55 2 2 32 2 44 1 1 31 1 55 3 2 ) ( ) ( ) ( + + + + + + + + + + = (3.17c) iωθ0i(iµ11k1U1+iµ22k2U2 +iµ33ζU3+∈Θ)=K(k12 +k22 +ζ2)Θ (3.17d) 將(3.17)式的振幅分量U 、1 U 、2 U 和 Θ 提出,可得克里斯多福方程式3 (Christoeffel equation)如下:
0 3 2 1 0 0 3 0 2 0 1 3 2 33 32 31 2 23 2 22 21 1 13 12 2 11 = ⎪ ⎪ ⎭ ⎪⎪ ⎬ ⎫ ⎪ ⎪ ⎩ ⎪⎪ ⎨ ⎧ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ϕ ϕ ϕ − − − Θ U U U θ iω κ θ iω θ iω θ iω γ ω ρ Γ Γ Γ γ Γ ω ρ Γ Γ γ Γ Γ ω ρ Γ i i i i i i i (3.18) 其中對應之矩陣元素如下: Γ11 =C11k12 +C66k22 +C55ζ2 +σ11i k12 +σ22i k22 +σ33i ζ 2 (3.19a) Γ22 =C66k12 +C22k22 +C44ζ 2 + σ11i k12 +σ22i k22 +σ33i ζ2 (3.19b) Γ33 =C55k12 +C44k22 +C33ζ 2 +σ11i k12 +σ22i k22 +σ33i ζ2 (3.19c) Γ23 = Γ32 =(C23 +C44)k2ζ (3.19d) Γ13 = Γ31 =(C13 +C55)k1ζ (3.19e) Γ12 = Γ21=(C12 +C66)k1k2 (3.19f) i i θ iω ζ k k K θ iω κ 0 2 2 2 2 1 0 ) ( + + − ∈ = (3.19g) ( 11 1) 0 1 1 i µ k θ iω γ = ϕ i = (3.19h) ( 22 2) 0 2 2 i µ k θ iω γ = ϕ i = (3.19i) ( 33 ) 0 3 3 i µ ζ θ iω γ = ϕ i = (3.19j) 若(3.18)式存在非零解,則(3.18)等號左端的行列式必須為零, det 0 0 0 3 0 2 0 1 3 2 33 32 31 2 23 2 22 21 1 13 12 2 11 = ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ϕ ϕ ϕ − − − i i i i i i i θ iω κ θ iω θ iω θ iω γ ω ρ Γ Γ Γ γ Γ ω ρ Γ Γ γ Γ Γ ω ρ Γ (3.20) 將(3.20)展開,可得ζ 的四次特徵方程式為 2
A8ζ8 + A6ζ6 + A4ζ 4 + A2ζ 2 + A0 =0 (3.21) 其中領導係數A8 ~ A0詳列於附錄A,為了限制特徵值為單值函數,需加入 一拘束條件,Im(ζk)≥0,k =1,2,3,4,即傳入試體的彈性波和熱波,其振 幅強度隨著傳入之深度遞減。特徵值分別為±ζ1,±ζ2,±ζ3,± ζ4,正號代表 朝正X 方向波傳的下傳波(down-going waves),負號代表朝負3 X 方向波傳3 的上傳波(up-going waves)。將特徵值代回(3.18)中,可獲得對應的特徵向量 } , , , {U1 U2 U3 Θ ,特徵向量各分量比值之關係為 ± ± ± ± ± ± ± ± ± = = = = k k k k k C P Θ P U P U P U 4k ) ( 3k ) ( 3 2k ) ( 2 1k ) ( 1 (3.22) 其中未知係數C 必須由邊界條件決定,而各項比例k± P 為 ik± ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − = ± ± ± ± ± ± ± ) ( 3 2 ) ( 33 ) ( 32 2 ) ( 23 2 ) ( 22 1 ) ( 13 12 1 det k i k k k i k k k γ ω ρ Γ Γ γ Γ ω ρ Γ γ Γ Γ P (3.23a) ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − − = ± ± ± ± ± ± ± ) ( 3 2 ) ( 33 ) ( 31 2 ) ( 23 21 1 ) ( 13 2 ) ( 11 2 det k i k k k k i k k γ ω ρ Γ Γ γ Γ Γ γ Γ ω ρ Γ P (3.23b) ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − = ± ± ± ± ± ± ) ( 3 ) ( 32 ) ( 31 2 2 ) ( 22 21 1 12 2 ) ( 11 3 det k k k i k i k k γ Γ Γ γ ω ρ Γ Γ γ Γ ω ρ Γ P (3.23c) ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − − − = ± ± ± ± ± ± ± 2 ) ( 33 ) ( 32 ) ( 31 ) ( 23 2 ) ( 22 21 13 12 2 ) ( 11 4 det ω ρ Γ Γ Γ Γ ω ρ Γ Γ Γ Γ ω ρ Γ P i k k k k i k i k k (3.23d) 由(3.16)和(3.22),位移及溫度可表示為
{
1 2 3}
T[
]
( 1 1 2 2 ) 0 0 U U U − ei kX +k X −ωt + − + − + ⎭ ⎬ ⎫ ⎩ ⎨ ⎧ ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ = Θ C C D D P P (3.24) 其中矩陣分別為⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ± ± ± ± ± ± ± ± ± ± ± ± ± ± ± ± ± 44 43 42 41 34 33 32 31 24 23 22 21 14 13 12 11 P P P P P P P P P P P P P P P P P (3.25a) ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ± ± ± ± ± 3 4 3 3 3 2 3 1 0 0 0 0 0 0 0 0 0 0 0 0 X iζ X iζ X iζ X iζ e e e e D (3.25b) C± =
{
C1± C2± C3± C4±}
(3.25c) 3.1.2 頻散方程式 前一小節所討論的是熱彈波必須滿足殘留應力熱彈統御方程式,本節 考慮在有限厚度 h 的受預應力立方晶體平板中,受到上下邊界條件限制, 彈性波和熱波的相速度為頻率函數。 參考圖3.3 所示,考慮熱彈波為藍姆波型態,依位移及溫度之對稱性, 可分為對稱波(symmetric waves)和反對稱波(anti-symmetric)。將(3.25b)以三 角函數表示,可將位移及溫度分為對稱和反對稱函數,分別表示如下: (1)對稱波 ( ) 3 3 1 4 3 3 1 3 3 3 1 2 3 3 1 1 3 2 1 2 2 1 1 ) ( cos ) ( sin ) ( cos ) ( cos ωt X k X k i j j j j j j j j j j j j j j j j e X ζ B P X ζ B P i X ζ B P X ζ B P θ u u u − + = = = = ⎪ ⎪ ⎪ ⎪ ⎪ ⎭ ⎪⎪ ⎪ ⎪ ⎪ ⎬ ⎫ ⎪ ⎪ ⎪ ⎪ ⎪ ⎩ ⎪⎪ ⎪ ⎪ ⎪ ⎨ ⎧ = ⎪ ⎪ ⎭ ⎪⎪ ⎬ ⎫ ⎪ ⎪ ⎩ ⎪⎪ ⎨ ⎧∑
∑
∑
∑
(3.26a)(2)反對稱波 ( ) 3 3 1 4 3 3 1 3 3 3 1 2 3 3 1 1 3 2 1 2 2 1 1 ) ( sin ) ( cos ) ( sin ) ( sin ωt X k X k i j j j j j j j j j j j j j j j j e X ζ D P i X ζ D P X ζ D P i X ζ D P i θ u u u − + = = = = ⎪ ⎪ ⎪ ⎪ ⎪ ⎭ ⎪⎪ ⎪ ⎪ ⎪ ⎬ ⎫ ⎪ ⎪ ⎪ ⎪ ⎪ ⎩ ⎪⎪ ⎪ ⎪ ⎪ ⎨ ⎧ = ⎪ ⎪ ⎭ ⎪⎪ ⎬ ⎫ ⎪ ⎪ ⎩ ⎪⎪ ⎨ ⎧
![圖 4.9 鍺[010]方向徹體波的波慢與殘留壓應力關係圖 50 圖 4.10 鍺[010]方向熱波的波慢與殘留壓應力關係圖 50 圖 4.11 鍺的徹體波相速度,實線代表未受應力,虛線代表 σ 2 = − 5 GPa 51 圖 4.12 鍺的徹體波相速度,實線代表未受應力,虛線代表 σ 1 = σ 2 = − 5 GPa 51 圖 4.13 鍺的熱波相速度,實線代表未受應力,虛線代表 σ 2 = − 5 GPa 52 圖 4.14 鍺的熱波相速度,實線代表](https://thumb-ap.123doks.com/thumbv2/9libinfo/8227634.170797/9.892.101.784.113.1262/代表未受應力虛線代表σ=−GPaGPa熱波度實線代表未受應力虛.webp)


![圖 4.43 鍺平板[110]波傳方向的|Q S |對波數、衰減值的變化](https://thumb-ap.123doks.com/thumbv2/9libinfo/8227634.170797/81.892.184.695.107.1054/圖443鍺平板11波傳方向的|QS|對波數衰減值的變化.webp)