692 IEEE JOURUAL ON SELECTED AREAS IN COMMUNICATIONS, VOL 14. NO 4, MAY 1996
A
Fully Distributed Power Control
Algorithm
for Cellular Mobile Systems
Tsern-Huei Lee,
Member, IEEE,and Jen-Cheng
Lin
Abstruct- Several distributed power control algorithms that can achieve carrier-to-interference ratio (CIR) balancing with probability one have been proposed recently for cellular mobile systems [5]-[SI. In these algorithms, only local information is used to adjust transmitting power. However, a normalization procedure is required in each iteration to determine transmitting power and, thus, these algorithms are not fully distributed. In this paper, we present a distributed power control algorithm which does not need the normalization procedure. We show that the proposed algorithm can achieve CIR balancing with probability one. Moreover, numerical results reveal our proposed scheme performs better than the algorithm presented in [7], which has the best performance among the distributed power control algorithms studied in [5]-[8]. The excellent performance and the fully distributed property make our proposed algorithm a good choice for cellular mobile systems.
I. INTRODUCTION
REQUENCY reuse is the core concept to increase system capacity of a cellular mobile system. CO-channel inter- ference due to simultaneous use of the same channel sets a limit on minimum reuse distance. Therefore, reduction of co- channel interference is desirable in designing a high capacity cellular mobile system. An effective technique that can be used to reduce co-channel interference and allow as many receivers as possible to obtain satisfactory reception is to control transmitting power. Reception is said to be satisfactory if the carrier-to-interference ratio (CIR) is greater than the minimum ClR required or the system protection ratio.
Depending on the execution location, power control algo- rithms can be categorized as either centralized or distributed. An optimum centralized power control algorithm which can achieve the minimum outage probability was studied in [ 3 ] . It is assumed that all the active link gains are available and remain constant during execution of the algorithm. This assumption, of course, is not realistic because of the high computational complexity required for the algorithm.
The distributed power control algorithm proposed in [5] uses only local CIR information and utilizes an iterative scheme to control the transmitting power. This distributed algorithm was shown to be able to achieve CIR balancing with probability one and, thus, when combined with cell removal algorithm, can obtain a minimum outage probability. When CIR balancing is achieved, all admitted connections operate at the same CIR level. However, the convergence speed of the algorithm is not
Manuscript rcviscd December 1995.
T.-H. Lcc is with the Department of Communications Engineering, National Chiao Tung University, Hsinchu, Taiwan 300, ROC.
J.-C. Lin is with thc National Space Program Office, National Science Council, Executive Yuan, Hsinchu, Tawan 300, ROC.
Publisher Item Identifier S 0733-8716(Y6)01944-0.
satisfactory. If the allowed maximum number of iterations is not large enough, then the distributed algorithm may result in an outage probability much greater than the optimum value.
Some other distributed power control algorithms which can achieve CIR balancing with probability one can be found in [ 6 ] - [ 8 ] . Of particular interest is the algorithm presented in [7] which can achieve CIR balancing much faster than the algorithm proposed in [ 5 ] . This algorithm suggests to adjust transmitting power in proportion to the received interference power. The algorithms studied in [6] and [8] contain the algorithm in [7] as a special case, but do not improve its performance. Although only local information is used to adjust transmitting power for all the distributed power control algorithms investigated in (51-[8], a normalization procedure is required in each iteration. That is, all base stations have to communicate with a central station to obtain a normalization factor to determine transmitting powers in the next iteration. Without the normalization procedure, transmitting powers may fall out of desired range.
In practical systems, it could be desirable to reduce transmit- ting powers as much as possible while maintaining the required quality of communication, especially for mobile terminals where transmitting power is provided by battery. To study this problem, one cannot neglect receiver noise. In [9], the maximum achievable CIR was derived under the constraint of maximum transmitting power. Also, a distributed constrained power control (DCPC) algorithm which achieves close to op- timum performance was proposed. Even under the maximum power constraint, the algorithm achieves CIR balancing, if it is achievable, with the minimum power level.
In this paper we propose a fully distributed power control algorithm that does not need a normalization procedure. We prove that the proposed algorithm can achieve CIR balancing with probability one. Through extensive computer simulations, we found this algorithm gives excellent performance.
The rest of this paper is organized as follows. System model is described in Section 11. The fully distributed power control algorithm and its several important properties are presented in Section 111. In Section IV, we modify the proposed algorithm to satisfy the finite dynamic power range constraint that always exists in a real system. Numerical examples and discussions are provided in Section V. Conclusions are finally drawn in Section VI.
11. SYSTEM MODEL
The cellular mobile system investigated in this paper con- sists of a finite number of cells. Cells using the same channel 0733-8716196SOS.00 0 1996 IEEE
LEE AND LIN: A FULLY DISTRIBUTED POWER CONTROL ALGORITHM 693
are placed symmetrically in a hexagonal grid. Base stations use omnidirectional antennas and are located at the center of the cells. Mobiles are assumed to be uniformly distributed over the cell area. Each cell has M independent channel pairs, each consisting of independent uplink and downlink channels. The power control algorithm can be used for both uplink and downlink channels. However, for easy of description, we assume the algorithm is used for downlink channels.
The interference caused by adjacent channels is assumed to be much smaller than co-channel interference and, thus, is neglected. Similarly, thermal noise is not considered. The set of cells using a certain channel at some given instant is called the co-channel set and the size of the co-channel set is denoted by N . All co-channels are assumed to be in use. For simplicity, the total interference power is modeled as the sum of the powers of all active interferers and the transmission quality is assumed to depend only on CIR. Furthermore, the cells of a co-channel set are numbered from 1 to N and the base station or mobile in cell i is referred to as base station
i or mobile i , respectively. Under these assumptions, the CIR
at mobile i , denoted by CIR,, is given by
where
Rj
is the power received from the j t h base station, Tj is the transmitting power used by base station j , Lij is the link gain between mobile i and base station j at some given moment, and Zij =2
is the normalized link gain. It is clear that2;;
= 1 for all i , 15
i5
N . Moreover, the value of L;j is assumed to be a constant. This assumption is reasonable if the power control algorithm can converge in a short period. The link gain L;j is modeled as L;j =2,
where Aij is the attenuation factor, d i j is the distance between mobile i and base station , j , and U is a constant that models the large scale propagation loss. The attenuation factor models power variation due to shadowing. We assume that A;?, 15
i , ,j5
N , are independent, log-normal, identically distributed random variables with 0 dB expectation and g dB log-variance. Theparameter value of in the range of 4-10 dB and the propagation constant U in the range of 3-5 usually provide good models for urban propagation [ 141.
Let
CIR
denote the system protection ratio. The outage probability, denoted by POoutage, is defined as2 3
-
N 1Poutage = - P, { CIRj
<
a}.
j=1
A CIR is said to be achievable in the co-channel set if there exists a power vector
T
= [ T I , T2,. . .
,
T N ] ~
such that CIR;2
CIR for all i , 1
5
i5
N .
It was shown[SI
that the maximum achievable CIR, denoted by CIR*, is given by1 CIR* = _ _
A* - 1 (3)
where A * is the largest real eigenvalue of the positive link gain
this maximum is the eigenvector of
Z
corresponding to the eigenvalue A*. All mobiles experience the same CIR* when T* is used.111. THE FULLY DISTRIBUTED POWER CONTROL ALGORITHM In this section, we present and prove several properties of the proposed fully distributed power control (FDPC) algo- rithm. In the following description, 1 represents the all-one vector, To denotes the initial transmitting power vector, T," denotes the transmitting power of base station i in the kth discrete time, and CIR," denotes the CIR at mobile
i
in the kth discrete time.FDPC algorithm:
TO= 1 and
where
Notice that there is one parameter
Y
in the above FDPC algorithm. As long as the value ofT
is determined ( a priori), base stations do not need to exchange information to perform the power control algorithm.The basic idea of the above FDPC algorithm is to increase or decrease transmitting power (in
dB)
of base station i in proportion to the difference of CIR at mobile i and a constant. (The same idea but in linear scale was studied in [6].) Let d B x = 1olog1ox. If 7: =m,
I- then the above FDPC algorithm can be expressed asTo = 1
and
( 6 )
However, to avoid a normalization procedure to make the al- gorithm fully distributed, we choose 7; as the value expressed in
(5).
Clearly, whenT
+ CO, the FDPC algorithm becomesthe fixed power control algorithm (i.e., without power control). There are several nice properties, including CIR balancing, of the proposed FDPC algorithm. These properties are stated and proved below.
IC
dp,T:+' - d p , T i = -(d,CIRf - ~ B T ) .
Property 1: T!+'
5
T," for all i and k . Property 2:Proof Property 1 is obviously true because 7;
5 1.
0
Proof Suppose CIR;
5
T. AS a result, we get$
= 1 and T/+' =T,".
SincezjfI
Z;jT;+'<
-E j f i
Z;jT; (a consequence of Property l), we haveIf CIR:
5
T, then CIR"'2
CIR;.T k
(7)
-
-
694 IEEE JOCRKAL Oh' SELECTED AREAS IN COMMUNICATIONS, VOL. 14, NO. 4, MAY 1996
Property 3: if CIRf
2
Y,
then CIR;2
Y
for alln
2
k . Proof To prove Property 3, it suffices to show that CIR:2
Y
implies CiR;+l2
Y.
It is clear thatFrom Property 1, we have
Since CIR:
2 Y,
qp is given bywhich when substituted into (9) gives
This completes the proof of Property 3.
0
Property 4: If
Y
I
min,{CIR:}. thenT;+l
=Y
*
I k 2 .where
1,"
=c,*,
ZL3T).
Proof: Suppose
Y
5
min,{CIR:}. From Property 3, one gets T5
min,{CIR:} for k2
1. Hence, for k2
0, we have q t = I2- .andCIR*
End of proof, Property 4. U
To prove Property 5 , i.e., CIR balancing with probability Lemma 1: Let T be a positive power vector, i.e., a vector one when CiR*
2
T,
we need the following lemma. with all entries greater than zero. Let CIR, =1
5
j5
N . If there exists an i such that CIR,<
CIR*, then there exists a k such that CIRk>
CIR*. Conversely, if there exists an i such that CIR;>
CIR*, then there exists a k such that CIRk<
CIR*.Proof: For convenience, we shall use CIR, (T) to repre- sent the CIR at mobile i when the transmitting power vector is T. Suppose CIR;(T)
<
CIR" and there does not exist a k such that CIRk>
CIR*. That is, CIRj5
CiR* for allj.
1 5 j 5 N . T J zJiTc ' Let ei = [ X I , 2 2 , .
. .
, Z.V]~, where if ,j = i if ,j#
i.Set T' = T
+
Fe,, where E>
0. For the transmitting powervector T', we have
= CiR;(T)
+
5
(14)I2
where
I,
=Ex+
Z,,T,. Since CIR,(T)<
CiR*, one can choose E sufficiently small (e.g., t = iI,(CIR* -CIR,(T))) to satisfy CIR, (T')<
CIR". Moreover, for other J#
z, we have<
CIR, (T) (15) which implies CIR,(T/)<
CIR* because CIR,(T)5
CiR*. Consequently, we have CiR,(T')<
CIR* for all m, 15
i7i
5
S. This contradicts with the fact [4]CIR* = T > O min l j a < N max {CIR,}.
The statement that CIR,
>
CIR* for some i implies CiRk<
CIR" for some k can be similarly proved. This completes the proof of Lemma 1.Property 5: If
Y
5
CIR", then limk+m CIR: = CIR* for all I .Proofc Consider first the case
T
<
CIR*. Suppose there is an z such that CIR;5
Y
for all k . Since the co-channel set is finite, we know, according to Lemma 1, that there exists anm
such that CIRL>
CIR* for infinitely many k . As a result,q k
<
&
for infinitely many k and we havea contradiction to CIRF,,
>
CIR" for infinitely many k . There- fore, there is a ko such that CIR:>
T
for all k>
ICo. Moreover, from iteration ko+
I , the FDPC algorithm becomeswith initial transmitting power vector Tko. In [7], it was proved that such an algorithm can achieve CIR balancing with probability one.
Consider now the case
Y
= CIR*. Let F be an arbitrary small positive real number. Suppose there is an i such that CIR:5
Y
- E for infinitely many k . According to Lemma 1,we know that there exists an m such that CIR;
>
T forinfinitely many k . Consequently, we have
which is again a contradiction. Therefore, we get limk-m CIRf
2
Y
for all i . Since CIR* = maxT>o minll,~N{ CIR, } [4], we conclude that limktoo CIR: =Y
for all i .0
LEE AND LIN: A FULLY DISTRIBUTED POWER CONTROL ALGORITHM 695
Remarks: Property 1 states that the transmitting power sequence for each base station is monotonic decreasing. Prop- erties 2 and 3 suggest to choose
T
to be greater than or equal tom.
In fact, from numerical results presented in SectionV,
we found thatT
=CIR
is the best choice. Property4
indicates that our proposed FDPC algorithm reduces to the distributed power control (DPC) algorithm proposed in [7] ifT
is chosen to be an extremely small number. (Remember the DPC algorithm updates transmitting power according to 7'"' =@I$ where /3'
>
0 is the normalization factor.) Property 5 states that the proposed FDPC algorithm can achieve CIR balancing with probability one as long asT
5
CIR*.Unfortunately, the FDPC algorithm also possesses an un- pleasant feature. According to Property 5 , if CIR*
>
T,
then CIR balancing can be achieved with probability one, which implies there exists a ko such that CIR?>
T for all i and k2
ko. Consequently, T,'" approaches zero as n increases. This feature may cause problem to a real system in which thermal noise cannot be omitted. In the next section, we suggest two approaches to deal with this problem.Iv.
FDPC WITH FINITE POWERRANGE CONSTRAINT
Suppose the transmitting power of each base station is restricted to be within
[S,
11. That is, the dynamic range is -1Olog,,S
dB. For example, the dynamic range is 10 dB if6
= 0.1 or 20 dB if S = 0.01. Let L denote the number of iterations. The following two schemes, called FDPC-I and FDPC-11, guarantee the transmitting power of each base station falls in the range [S, 11.Scheme FDPC-I: where Scheme FDPC-11: To = 1 and T"' =
71," * T,"
where and qmin = 6 ' f L .Scheme FDPC-I simply forces the transmitting power to be S if the value calculated from (4) is smaller than
S.
Scheme FDPC-I1 limits the maximum decrement of transmitting power in each iteration to satisfy the dynamic range constraint. Notice that Properties 1-3 still hold for both FDPC-I and FDPC-I1W
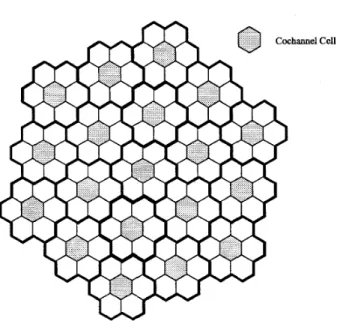
Fig. 1. 19 co-channel cells with seven-cell cluster.
schemes. The performance of FDPC-I and FDPC-I1 schemes are studied in the following section.
v.
NUMERICAL EXAMPLES AND DISCUSSIONS In this section, we study the outage probability of the proposed FDPC algorithm with numerical examples. A re- moval algorithm which step by step removes one cell, if necessary, until the CIR at each active mobile is greater than or equal toCIR
is adopted. We assume the FDPC algorithm is performed for L iterations. For the purpose of removing cells when necessary, CIR' is reported to a a Mobile Telephone Switching Officean (MTSO). AfterL
iterations, base stationz sends a message to the MTSO if CIR;
<
m.
The MTSO notifies cell L to cease transmission if CIR; = rnin,{c~~,O}. The FDPC algorithm is reinitialized after a removal.Numerical examples were obtained for a system containing 19 co-channel cells that uses a seven-cell cluster (see Fig. 1).
All the values were accomplished by means of Monte Carlo simulation for 500 independent configurations. In our study, we use 0 = 6 and v = 4. Outage probability is measured over
all 19 co-channels.
The average number of iterations required to reach a certain percentage of CIR* for the FDPC algorithm is shown in Table I. In this table, DPC denotes the distributed power con- trol algorithm presented in [7], which as shown in Property 4 can be considered as a special case of our proposed FDPC algorithm. It can be seen from the entries of Table I that the performance of the DPC algorithm can be improved. Table I1 gives the average number of iterations required to achieve CIR at every mobile station greater than for three different values of
a.
From the values listed in Table 11, we find that T =CIR
gives the best performance. A"*"
in Table I1 meansT
>
CIR; for all z and CIR,"<
for some J happened atleast once in our simulations. When it happens, CIR:
<
a
for all IC and, thus, the average number of iterations to achieve CIR:> CIR
for all z becomes infinity. Notice that the FDPC algorithm can achieve CIR;>
F R very fast (in less than696
0.2
IEEE JOUR\Al. 0.U SELECTED AREAS IN COMMUNICATIONS, VOL 14, NO 4, MAY 1996
DPC - FDPC-I mPC-I1 ---- mPC - TABLE I
THE AVERAGE NUMBER OF ITEKATIONS REQUIRED TO REACH A CERT,Al>
PERCENTAGE OF CIR' FOR THE DPC AND FDPC ALGORITHMS T = 10 dB T = 5 d B T = l d B 90% 95% 98% 90% 95% 98% 90% 95% 98%
DPC 8.282 12.830 19.964 8.836 13.472 20.724 8.830 13.474 20.736 FDPC 4.784 8.328 14.570 7.106 11.538 18.760 8.320 12.978 20.348
TABLE I1
THE. AVERAGE NUMBER OF I T E K A T ~ S REQUIRED TO ACHIEVE CIR AT E \ E
MOBILE STATION GREATER T H A N CIR FOR THREL DIFFEREUT VALUES OF CIR
T C I R 1 7 d B 1 5 d B 1 2 d B 1 0 d B 8 d B 5 d B 1 dB 0.1 dB 5 dB
*
*
0.798 0.734 1.730 2.006 1 0 d B*
*
1.496 1.272 2.389 3.880 5.068 5.273 15 dB 2.384 1.674 2.594 3.204 3.716 4.186 4.338 4.352*
t 0.25 0.2 0.15 0.1 0.05Fig. 2. Outage probability as a function of protection ratio for variouc algorithms. The dynamic power range is 10 dB for both FDPC-I and FDPC-I1 schemes.
three iterations if T =
a).
The entries of Tables I and I1 are obtained without dynamic power range constraint (i.e.,6
= 0). Also, no cell removal is conducted in generating the tables.Shown in Figs. 2-5 are the outage probabilities as a function of protection ratio for different dynamic power ranges. The number of iterations
L
is chosen to be eight, a reasonable value for typical vehicle speeds [ 5 ] . The curves labeled FDPC are for the proposed algorithm without dynamic power range constraint. It can be seen that Scheme FDPC-I has a smaller outage probability than Scheme FDPC-I1 does. When the dynamic power range is greater than or equal to 15 dB, both FDPC-I and FDPC-I1 schemes outperform the DPC algorithm, as demonstrated in Figs. 3 and 4. Also, for a dynamic power range of 20 dB, the performance of the FDPC-I scheme is very close to that of the proposed FDPC algorithm without dynamic power range constraint.VI. CONCLUSION
We have in this paper proposed and proved some nice properties of a fully distributed power control algorithm for cellular mobile systems. Elimination of a normalization pro- cedure renders fully distributed power control of our proposed algorithm possible. Normalization could be helpful if one intends to reduce transmitting powers. However, it causes transmission and real-time processing of data between base
2 4 6 8 I0 12 14 16 18 20
protechon ratio
Fig. 3. Outage probability as a function of protection ratio, for various algorithms. The dynamic power range is 15 dB for both FDPC-I and FDPC-I1
schemes.
Fig. 3. Outage probability as a function of protection ratio for various algorithms. The dSnamic power range is 20 dB for both FDPC-I and FDPC-I1
schemes. 0.25 1 1 0.2 0.15 0.1 0.05 n " 0 5 15
Fig. 5. Outage probability as a function of protection ratio for various algorithms. The dynamic power range is 25 dB for both FDPC-I and FDPC-I1
schemes.
stations and the central station which obviously increases system complexity and, therefore, may not be necessary. Through extensive computer simulations, we found the pro- posed FDPC algorithm gives excellent performance. The effect of finite power range to our proposed FDPC algorithm is
LEE AND LIN: A FULLY DISTRIBUTED POWER CONTROL ALGORITHM 691
also investigated. Numerical results show that for
-
L
= 8, the 1141 . .W. C. Y. Lee, “Elements of cellular mobile radio,” IEEE Trans. Veh. Technol., vol. VT-35, pp. 48-56, 1986.1974. ch. XIII.
degradation in Of Outage probability
is
as long ,151 F, R, Gantmacher, The Theory ofMatrices, 2, New York: Chelsea, as the dynamic range is greater than20
dB, which is practicalin most real world systems. The excellent performance and the fully distributed property make the proposed FDPC algorithm a good choice for cellular mobile systems.
REFERENCES
[ l ] J. M. Aein, “Power balancing in systems employing frequency reuse,” COMSAT Tech. Rev., vol. 3, no. 2, pp. 277-300, Fall 1973. [2] H. Alavi and R. W. Nettleton, “Downstream power control for a spread
spectrum cellular mobile radio system,” in Con$ Rec., GLOBECOM ’82, Miami, FL, Nov. 29-Dec. 3, 1982.
[3] J. Zander, “Performance of optimum transmitter power control in cellular radio systems,” IEEE Trans. Veh. Technol., vol. 41, no. 1, pp. 57-62, Feb. 1992.
[4] S. A. Grandhi, R. Vijayan, D. J. Goodman, and J. Zander, “Centralized power control in cellular radio systems,” IEEE Trans. Veh. Technol., vol. 42, no. 4, pp. 4 6 6 4 6 8 , Nov. 1993.
[SI J. Zander, “Distributed cochannel interference control in cellular radio systems,” IEEE Trans. Veh. Technol., vol. 41, no. 3, pp. 305-311, Aug. 1992.
[6] G. J. Foschini and Z. Miljanic, “A simple distributed autonomous power control algorithm and its convergence,” IEEE Trans. Veh. Technol., vol. 42, no. 4, pp. 641-646, Nov. 1993.
[7] S. A. Grandhi, R. Vijayan, and D. J. Goodman, “Distributed power control in cellular radio systems,” IEEE Trans. Commun., vol. 42, nos.
2/3/4, pp. 226-228, Feb./Mar./Apr. 1994.
[8] T. H. Lee, J. C. Lin, and Y. T. Su, “Downlink power control algorithms for cellular radio systems,” ZEEE Trans. Veh. Technol., vol. 44, no. 1, pp. 89-94, Feb. 1995.
[9] S. A. Grandhi and J. Zander, “Constrained power control in cellular radio systems,” in Proc. IEEE Veh. Technol. Con$, Stockholm, Sweden, June 1994, vol. VTC-94, pp. 824-828.
[lo] S. C. Chen, N. Bambos, and G. J. Pottie, “On distributed power control for radio networks,” in 1994 Proc. Int. Commun. Con$, New Orleans, LA, May 1994, pp. 1281-1285.
I1 11 J. F. Whitehead, “Signal-level-based dynamic power control for co- channel interference management,” 43rd IEEE Veh. Technol. Con$, Secaucus, NJ, May 1993, pp. 449-502.
[12] T. Nagatsu, T. Tsnruhara, and M. Sakamoto, “Transmitter power control for cellular land mobile radio,” in Proc. IEEE Veh. Technol. Con$, 1985,
[I31 H. Hammuda, J. McGeehan, and A. Bateman, “Spectral efficiency of cellular land mobile radio systems,” in Proc. 38th IEEE Veh. Technol. Con$, June 1988, pp. 616-620.
pp. 12-15.
Tsern-Huei Lee (M’87) received the B.S. degree from National Taiwan University, Taipei, Taiwan, ROC, in 1981, the M.S degree from the University of California, Santa Barbara, in 1984, and the Ph.D. degree from the University of Southern California,
Los Angeles, in 1987, all in electrical engmeenng. Since 1987, he has been a member of the fac- ulty of National Chiao Tung university, Hsinchu, Taiwan, ROC, where he is a Professor of the Depart- ment of Communication Engineering and a member of Center for Telecommunications Research. His current research interests are in wireless communications, communication protocols, broadband switching networks, and network flow control
Dr Lee received an Outstanding Paper Award from the Institute of Chinese Engineers in 1991.
Jen-Cheng Lin received the B.S. degree in elec- tronics engineenng from Chung Yuan Christian Uni- versity, Chungh, Taiwan, ROC, in 1979, the M S
degree in computer science and information en- gineering from National Chiao Tung University, Hsmchu, Taiwan, ROC, in 1990, and the Ph.D. degree in electronics engineering from National Chiao Tung University in 1995.
He joined ERSO/ITRI, Hsinchu, Taiwan in 1983, where he prirnanly worked on the development of device drivers as a project leader. In 1986 he was with New Development Corporation, Hsinchu, Taiwan In 1987 he was with Link Communications Inc., Hsinchu, Taiwan, where he worked on the development of statistical multiplexer and VSAT system as a Project Manager. From November 1990 to March 1993, he served as a technical consultant to the Microelectronics Technology Inc., Hsinchu, Taiwan on
maritime communications system and personal communications system. He is currently an Associate Researcher in the National Space Program Office, National Science Council, Executive Yuan Hsmchu, Taiwan, ROC. His current research interests include wireless cornmumcation networks and satellite communication systems