行政院國家科學委員會專題研究計畫 成果報告
壓電致動器的自感功能導入精密定位裝置之研究
計畫類別: 個別型計畫
計畫編號: NSC92-2212-E-151-010-
執行期間: 92 年 08 月 01 日至 93 年 07 月 31 日
執行單位: 國立高雄應用科技大學機械工程系
計畫主持人: 何信宗
計畫參與人員: 吳佳恩,倪薪富
報告類型: 精簡報告
處理方式: 本計畫涉及專利或其他智慧財產權,2 年後可公開查詢
中 華 民 國 93 年 11 月 1 日
行政院國家科學委員會補助專題研究計畫
■ 成 果 報 告
□期中進度報告
(計畫名稱)
壓電致動器的自感功能導入精密定位裝置之研究
計畫類別:■
個別型計畫 □
整合型計畫
計畫編號:NSC 92-2212-E-151-010-
執行期間: 92 年 8 月 1 日至 93 年 7 月 31 日
計畫主持人:何信宗
共同主持人:
計畫參與人員: 吳佳恩, 倪薪富
成果報告類型(依經費核定清單規定繳交):■精簡報告 □完整報告
本成果報告包括以下應繳交之附件:
□赴國外出差或研習心得報告一份
□赴大陸地區出差或研習心得報告一份
□出席國際學術會議心得報告及發表之論文各一份
□國際合作研究計畫國外研究報告書一份
處理方式:除產學合作研究計畫、提升產業技術及人才培育研究計畫、
列管計畫及下列情形者外,得立即公開查詢
□涉及專利或其他智慧財產權,□一年■二年後可公開查詢
執行單位:國立高雄應用科技大學機械工程系
中 華 民 國 93 年 10 月 30 日
可供推廣之研發成果資料表
■
可申請專利 □
可技術移轉
日期: 年 月 日國科會補助計畫
計畫名稱:壓電致動器的自感功能導入精密定位裝置之研究
計畫主持人:何信宗
計畫編號:
NSC 92-2212-E-151-010-
學門領域:機械固力
技術/創作名稱
自感致動式精密定位裝置
發明人/創作人
何信宗
中文:本技術係以壓電致動器推動定位平台達到所需的精度與行
程,其特別之處在於充份利用壓電材料的壓電效應與逆壓電效應兩
項特性,以單一個壓電致動器同時充當致動器與感測器使用。
(100~500 字)
技術說明
英文:Self-sensing actuation is a control technique that can be applied to
piezoelectric actuators. It involves extracting a sensing signal by use of a bridge circuit, then properly feeding this signal back to compensate for the non-linearity of the actuators and to improve the positioning device’s performance.可利用之產業
及
可開發之產品
精密定位裝置
技術特點
推廣及運用的價值
※ 1.每項研發成果請填寫一式二份,一份隨成果報告送繳本會,一份送 貴單位
研發成果推廣單位(如技術移轉中心)
。
※ 2.本項研發成果若尚未申請專利,請勿揭露可申請專利之主要內容。
※
3.本表若不敷使用,請自行影印使用。
附件二
行政院國家科學委員會專題研究計畫成果報告
壓電致動器的自感功能導入精密定位裝置之研究
A Study of Precision Positioning Device
with Self-sensing Piezoelectric Actuators
計畫編號:NSC 92-2212-E-151-010
執行期限:92 年 8 月 1 日至 93 年 7 月 31 日
主持人:何信宗 國立高雄應用科技大學機械工程系
一、中文摘要
基於實用技術的考量,本計畫提出一種新型精密 定位裝置,其內部係以壓電致動器推動定位平台達到 所需的精度與行程,並導入壓電致動器的自感功能, 對定位裝置進行回授控制以提高精度。本研究的特別 之處在於充份利用壓電材料的壓電效應與逆壓電效應 兩項特性,以單一個壓電致動器同時充當致動器與感 測器使用,透過橋式電路的設計,分離出相對於壓電 致動器變形量之自感電壓信號,對系統進行回授控制 以消除壓電致動器本身在電壓驅動時所產生的非線性 現象,提高精密定位裝置的精度。此自感致動技術導 入精密定位裝置的方法將使裝置在增加控制系統安定 性的同時,簡化精密定位裝置的組裝複雜度,減少感 測器的安裝步驟與成本,增加此類型產品的性能與經 濟性。 關鍵詞:自感, 橋式電路, 精密定位, 壓電致動器, 撓性結構Abstract
Based on the consideration of practical use, this project’s primary objective is to develop a precision positioning device with a high displacement resolution and suitable travel range. In addition, we show how a novel technique known as self-sensing can be used to enhance the performance of the precision positioning device. Self-sensing actuation is a control technique that can be applied to piezoelectric actuators. It involves extracting a sensing signal by use of a bridge circuit, then properly feeding this signal back to compensate for the non-linearity of the actuators and to improve the positioning device’s performance. It will improve this kind of product’s performance and reduce the cost of production since this self-sensing actuation technique can improve the stability of the control system, simplify the structure of device, and needs no additional sensing devices.
Keywords:Self-sensing, Bridge Circuit, Precision
Positioning, Piezoelectric Actuator, Flexure Structure
二、前言
精密定位裝置在現今的精密工程上使用極多,在 奈米科技中,作為 STM、AFM、SPM 等奈米級工具 的精密定位裝置,或者超精密加工裝置等均需要內裝 具有微小位移能力之壓電致動器所構成的微動機構 方能達到控制的目的。壓電致動器由於具有微小的位 移量,快速的反應速度且能產生強大的推力之特性, 在精密機構的微小位移控制上相當能夠滿足要求。 壓電驅動式精密定位裝置的文獻已有不少,如 Adriaens [1]曾針對壓電致動器及壓電致動器搭配彈 性結構所構成的微動機構進行機械系統模型與機電 系統模型的探討,但未對回授控制多加探討。Wakui[2] 則針對壓電驅動式微動機構進行了高速定位目的的 控制補償探討。Nagaya[3]則對於具有位移擴大作用 的壓電驅動式微動機構進行回授控制,與其它文獻不 同之處在於其以加速度計裝於微動機構之移動部位 做為微動感測器,可解決平台裝置感測器的問題。 He[4]則製作一壓電驅動式微動機構,並探討了達到 奈米尺度定位的機構設計要點。另外,對於壓電致動 器的非線性現象則有相當多的論文進行探討[5,6]。 壓電驅動式精密定位裝置主要由彈性結構、壓電 致動器與驅動電路所構成,而機械系統的彈性結構與 電氣系統的驅動電路間透過壓電致動器做為機電轉 換器,將電能轉換為機械能用以達到驅動微動平台達 成控制目標。在控制時,對整個精密定位裝置的機電 系統而言,其機械結構與驅動電路的設計上關係整個 系統的控制性能甚巨,但在文獻上對此機電系統數學 模型的探討仍不多見,因此本研究特別製作一個可將 壓電致動器的變形量放大的微動機構,並針對此微動 機構進行壓電結構系統的分析,期望能在提高系統控 制性能的目標下,探討此壓電致動器與彈性結構所構 成的壓電結構,其提高控制性能之設計要點。三、理論分析
壓電驅動式精密定位裝置為一機電系統,主 要由機械結構、壓電致動器與驅動電路所構成, 其中壓電致動器為一機電轉換器,介於機械結構 與驅動電路之間進行電能與機械能之轉換。在本 節中,將這些微動平台的構成元件逐一進行動態 分析,以利對整個精密定位裝置系統特性的充份 掌握。3.1 壓電致動器的等效電路
首先就壓電材料作分析,壓電材料受應力T,應 變S,電場 E 與電位 D 所影響,因此,表現壓電材 料動作行為的線性方程式可以下列的壓電方程式表 示之 k kij kl E ijkl ij s T d E S = + (1) k T ik kl ikl i d T ε E D = + (2) 其中,s
E為彈性係數矩陣,d 為壓電常數矩陣,ε
T 為誘電常數矩陣。而 ijkl 代表的是 xyz 軸的方向。當 面對結構物是由壓電材料與彈性體所結合而成的機 電系統時,前述線性壓電方程式並不足以描述壓電材 料與彈性結構所構成的整個精密定位裝置之機電系 統的動態行為,在此情況下,可經過下列赫米特法則 的運算, 2[
( )]
0 1 − + + =∫
t dt t δ T U We δW (3) 將壓電材料與彈性物所構成之機電系統之統御 方程式推導出來,其中,T 指的是系統的動能,U 為 位能,We為儲存於壓電材料內之電能,δ 為外界W 所作功,經過運算與整理之後,可得下列兩式 mx&&+dx&+kx−θvP = f (4) θx+CPvP =q (5) 一般,(4)式被稱為驅動方程式,(5)式被稱為感 測方程式,此兩式可描述出整個機電系統的線性動態 行為,卻無法表現出其非線性的現象,原因是壓電材 料的非線性現象主要來自於驅動壓電材料時,其本身 形狀的變化導致電容量的變化,這微小的電容量變化 即會導致驅動電壓與壓電材料的微小位移量之間產 生所謂的非線性現象。若用電荷驅動時則因壓電材料 的驅動電荷與位移量之間的關係不受電容量的變化 所影響,可避免非線性現象的發生。由於這些原因, 當我們要以電壓線性的驅動壓電致動器時,必需將電 容量變化所導致的非線性現象加到(4)(5)兩式中加以 考慮方才合理。(4)(5)式中 m,d,k 分別為系統的等 價質量,阻尼係數與彈性係數,y 為位移量,v
P為施 於壓電致動器上的實際電壓,θ
則為電壓與位移量間 之轉換係數,另外,C
P為壓電致動器之電容量,q 為電荷,f
則為施於壓電致動器之外力。 此機電系統之等價電路可以 Fig.1 表示之,此等 價電路可看做是一 2 端子對電路,其數學式以 H 行 列式表示時,可表示成(6)式 − = P E P v sX Y Z sQ F θ θ (6) 由 Fig.1 可以直接看出,此壓電材料與彈性體所 構成的機電系統,一端子對為壓電材料上施加的電壓 與電流,而另一端子對為施加於系統上之外力與速 度,從機電系統中能量的轉換關係可以說明機械端之 機械能經過此壓電轉換器可轉換為電能,而電能亦能 透過此壓電轉換器轉換為機械能。其中,ZP為此機 電系統在vP =0之短路狀態的阻抗(F /sX),Y 則為E 系統在 sX=0 受制狀態時的導納(sQ/v
P)。3.2 壓電驅動式精密定位裝置
一般,壓電驅動式精密定位裝置是將壓電致動器 裝於含有位移放大機構之精密定位裝置之中,以便將 壓電致動器所產生的微量變化放大並推動精密定位 裝置,如 Fig.2 所示。其運動方程式為 ) ( ) (Ax y K Ax y D y K y D yMs&&+ s&+ s = a &− & + a − (8) 其中, y 為微動平台的位移量, x 為壓電致動器的變 形量,M 為微動平台的質量,s D 為微動平台的阻s 尼係數,K 為微動平台的彈簧係數,s D 為位移放大a 機構的阻尼係數,K 為位移放大機構的彈簧係數,a A 為位移放大機構的位移放大率。因此,自壓電致動 器的變形量 x 至微動平台的位移 y 之轉移函數Ga(s) 可表示如下 ) ( ) ( ) ( ) ( 2 a s a s s a a a K K s D D s M K s D A s G + + + + + = (9) 如 Fig. 2 所示,在壓電驅動式精密定位裝置中, 壓電致動器的一端為固定端,另外一端與微動平台相 連接。微動平台作用於壓電致動器的力量由於是經過 位移放大機構的阻尼Da與彈簧Ka,因此其作用力 為阻尼力與彈簧力之和,且應考慮位移放大所造成的 力量槓桿關係。因此,微動平台Ms與壓電致動器之 間的作用力F(s)可以下式表示之 F=(Das+Ka)(Y−AX) (10) 因此,自壓電致動器的推力F(s)至微動平台的位移 ) (s Y 之轉移函數
H
(s
)
可將(9)式與(10)式整理後,表 示如下 s s ss D s K M s H + + − = 2 1 ) ( (11) 將壓電致動器裝入微動平台後之運動方程式可 由(7)式與(10)合併後得到,整個壓電驅動式微動平台 從輸入電壓vP(s)到壓電致動器的變形量X(s)之關 係式可表示如下k ds ms K s D s M G s v s X s s s a P + + + + + = 2 2 ) ( ) ( ) ( θ (12) 而整個壓電驅動式精密定位裝置從輸入電壓 ) (s vP 到輸出位移Y(s)之轉移函數可表示如下 k ds ms K s D s M G G s v s Y S S S a a P + + + + + = 2 2 ) ( ) ( ) ( θ (13) 由於壓電驅動式精密定位裝置本身為一機電系 統,以等效電路的方法來分析整個系統會使問題簡化 許多。因此,在此以等效電路分析法進行分析以了解 其動態特性。Fig.3 為整個壓電驅動式精密定位裝置 的機電系統等效電路,從圖中可看出壓電致動器的機 械阻抗ZP與位移平台的機械阻抗ZS串聯後構成整 個機械系統總阻抗ZM。由於此機電系統係透過一轉 換係數為(1:θ)之轉換器進行機械能與電能的轉 換,因此由其機械總阻抗ZM 和電氣阻抗ZE(=1/YE) 的並聯關係,可將 Fig.3 的等效電路再簡化為 Fig.4 的等效電路圖表示之。當進行壓電驅動式精密定位裝 置的機電系統設計時,包含機械系統與電氣系統之整 體設計變得較為重要,此時便可依此系統阻抗分析進 行模擬與分析,以設計出較為優良的特性。
3.3 自感壓電致動式精密定位裝置
將壓電致動器之自感功能應用於精密定位裝置 時,首先必須先對 Fig.3 的系統組抗關係全部算出, 方可設計一個自感電路將相對於微動平台位移量之 電壓信號分離出來。Fig.3 中之機械總阻抗可表示如 下 P S ME Z Z Z = + (14) ) / ( ) / )( (s M s D K s ms d k s Ga s + s+ s + + + = 上式中含有壓電致動器之阻抗與位移放大機構之阻 抗。若將整個精密定位裝置之總阻抗全部納入計算亦 可得到,在此考慮方程式之表示簡潔化,可將系統之 總導納表示如下 ME E T Y Y Y = +θ2 (15) ) / ( ) / )( ( 2 s k d ms s K D s M s G s C s s s a P + + + + + + = θ 為分離出微動平台之位移信號,我們採用 Fig.5 所示 之自感電路,電路上之電壓V1,V2可分別計算如下 o ME P c C s Y C V V1 +θ2 / − = (16) 2 1 2 C C V V c − = (17) 若在此自感電路中,選用滿足CP/Co =C1/C2之電 容元件,則可由自感電路中分離出感測電壓信號Vs。 c o ME s V s C Y V V V 2 1 2 θ = − = (18) 根據(12)式與(18)式的代換,可得到自感信號 ) (s Vs 與壓電致動器變形量X(s)間之關係式如下 ) ( ) ( X s C s V o s θ = (19) 再將(9)式代入(19)式中,則可得到自感信號Vs(s) 與微動平台位移量X(s)間之關係式如下 ) ( ) ( ) ( G sY s C s V a o s θ = (20) 由(20)式可以看出,在轉移函數Ga(s)之頻寬範 圍內,自感信號Vs(s)可呈現微動平台之運動狀況, 我們可利用此自感信號進行微動平台之回授控制,達 到精密定位之目的。四、壓電驅動式微動機構之設計
為了將前述所推導的壓電自感致動功能實現,本 研究設計了單軸精密定位裝置與 XY 軸精密定位裝 置,並在製作前以 ANSYS 分析了整個精密定位裝置 之靜態分析與動態分析。Fig.6(a)為單軸精密定位裝置 在 150V 電壓驅動下之變形情形,在無負載下由有限 元素分析得到約 172 µm 的位移量。Fig.6(b)為雙軸精 密定位裝置在 150V 電壓驅動下之 X 軸向位移量,在 無負載下由有限元素分析得到約 173 µm 的位移量。 Fig.6(c)為雙軸精密定位裝置在 150V 電壓驅動下之 Y 軸向位移量在無負載下由有限元素分析得到約 172 µm 的位移量。 精密定位裝置在 ANSYS 分析後,以線切割製作 完成,如圖 Fig.7(a)(b)為加工完成的精密定位裝置模 樣,Fig.7(a)為單軸精密定位裝置,Fig.7(b) XY 軸精 密定位裝置。五、實驗
5.1 實驗佈置
在精密定位裝置中的位移擴大機構內裝入一積 層型壓電致動器,此TokinAE0505D16 壓電致動器在 150V電壓驅動下,依產品資料表所記載可產生約 17µm 位移量;在本實驗中,以100V電壓進行驅動, 預估可產生約10µm 位移量。積層型壓電致動器所產 生的位移量在經過位移擴大機構放大後,由電容式位 移計測量其位移量,並由頻譜分析儀將輸入電壓至輸 出位移量間之轉移函數頻譜圖與理論分析值做比 較,以求取精密定位裝置的機電系統參數。依此方法 確立此理論分析與實驗值一致後,並可以本實驗中之 電容式位移計所量得的位移信號做為回授控制信 號,經過PI控制器設計後可準確控制壓電驅動式精密 定位裝置達到精密定位的目標。5.2 機電系統參數
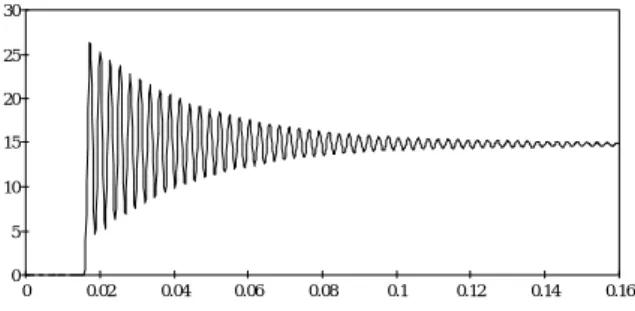
由於本研究中之壓電驅動式精密定位裝置為一 機電系統,機械端的輸出變數為驅動力F(s)與微動平台的位移量X(s),電氣端的輸入變數為壓電致動 器的驅動電壓vP(s)與驅動電流sQ(s)。因此由機械 端與電氣端兩輸出端,吾人可以以實驗的方法得到其 轉移函數,再以 Curve Fitting 的方式求得此機電系統 的內部參數。 在此,考慮到實驗值量取的方便性,因此以輸入 電壓vP(s)與輸出位移量Y(s)間之轉移函數,對照理 論分析與實驗頻譜數據以求出其機電系統參數。 Table.1 為模擬分析所採用參數值,其轉移函數的波 德圖可比較數值模擬與實驗數據(Fig.8)。並可比較開 迴路控制時的數值模擬(Fig.9)與實驗數據(Fig.10)。
Table 1 Piezoelectric actuator parameters Specific dielectric constant
0 33/ε εT 5440 Compliance s11E 14.8×10−12m /2 N Compliance s33E 18.1×10−12m /2 N Piezoelectric modulus d31 -287 12 10− × m /V Piezoelectric modulus d33 635 12 10− ×
m /
V
Density ρ 8000 3 / m kg Size 5mm×5mm×20mm六、結論
本論文針對壓電驅動式精密定位裝置進行了其 機電系統的理論分析,將壓電致動器與微動機構的介 面以機械阻抗的型態相結合,將壓電致動器的機電系 統推展為整個壓電驅動式精密定位裝置的機電系 統,並以實驗所得的系統轉移函數和理論推導值相比 較,求取整個機電系統的內部參數。另一方面,本研 究以壓電致動器的自感電路抽出相對於位移量大小 的自感電壓信號,並以此做為回授信號對系統進行回 授控制,此方法可有效達到提高精密定位控制性能之 目的。七、計畫成果自評
本計畫之執行目標主要在探求壓電致動器之自感 功能是否可以適用於壓電驅動式精密定位裝置上,經 過赫米特法則的推導,本研究先將積層型壓電致動器 之機電系統運動方程式求出,可精確掌握其電能與機 械能之間的轉換關係。其次,將所求得的壓電致動器 運動方程式與位移放大機構之運動方程式以機械阻抗 的方式結合成一個完整系統,可因此求得精密定位裝 置之機電系統數學模型,並得到其等效電路,可說是 本計畫執行之第二項突破。 針對壓電致動式精密定位裝置,本研究設計出其 自感電路,並推導出微動平台運動物理量與自感電壓 信號間之關係式。最後,以實驗的實施來驗證理論推 導之結果,確認壓電致動器的自感功能導入精密定位 裝置在理論上與實務上皆為可行。不過,由於精密定 位裝置中之位移擴大機構之工作頻寬遠較壓電致動器 之工作頻寬為小的緣故,將會限制壓電自感電路技術 適用於精密定位裝置之範圍,為本計畫所發現的第三 項重點。 計畫執行成果於國內研討會及國外研討會各發表 一篇論文,期刊論文之投稿正在整理中。八、參考文獻
[1] H.J.Adriaens, W.L.Koning, and R.Banning, “Modeling Piezoelectric Actuators”, IEEE/ASME Transactions on Mechatronics, 5, pp.331-341, 2000.
[2] S.Wakui, “High-Speed Positioning Method for Fine Motion Mechanism using a Piezo Element”, JSME, 63(612), pp.2693-2700, 1997.
[3] K.Nagaya, S.Ikai, T. Fukushima, A.Kurusu, and H.Kashima, “Analysis of a Piezoelectric Actuator with a Displacement Enlargement Mechanism and its Control”, JSME, 62(599), pp.2721-2729, 1997. [4] L.He, F.Wang, D.Mapps, and P.Robinson,
“Nanoscale Positioning for Magnetic Recording”, Sensors and Actuators, 81, pp.313-316, 2000. [5] Y.Yu, N.Naganathan, and R.Dukkipati, “Preisach
Modeling of Hysteresis for Piezoceramic Actuator System”, Mechanism and Machine Theory, 37, pp.49-59, 2002.
[6] P.Ge, M.Jouaneh, “Modeling Hysteresis in Piezoceramic Actuators”, Precision Engineering, 17, pp.211-221, 1995.
[7] 何信宗,吳佳恩, 2003, “精密定位裝置之撓性 結構的振動分析”, 第十一屆中華民國振動與 噪音工程學術研討會, 基隆.
[8] Shine-Tzong HO, 2004, September, “Dynamic Modeling and Control of a piezo-actuated stage”, JSME Dynamics and Design Conference 2004, Tokyo.
Fig.1 Piezoelectric transducer
sQ
EY
PZ
Pv
F
sX
θ
:
1
Fig.2 Piezo-actuated positioning stage
Fig.3 Effective circuit of the piezo-actuated stage
Fig.4 Effective circuit of the piezo-actuated stage
Fig.5 The self-sensing circuit for the micro-stage
Fig.6(a) 單軸精密定位裝置之位移量(150V) Fig.6(b) 雙軸精密定位裝置之 X 軸向位移量 (150V) Fig.6(c) 雙軸精密定位裝置之 Y 軸向位移量 (150V)
y
Ax
a K KS a D DS PZTM
S ME 2Y θ P C c V o C 1 V EY
PZ
SZ
θ
:
1
Pv
sQ
sQ
sX
E Y θ2YME Pv
2 V 1 C 2 CFig.7(a) 單軸精密定位裝置 Fig.7(b) 雙軸精密定位裝置 101 102 103 100 102 Hz um /V 101 102 103 -400 -200 0 200 Hz D egr ee Experiment Simulation
Fig. 8 Frequency response of the mechanism with open loop control, M=0.842kg, K=44746N/m,
m=0.002kg, d=967N-s/m, k=8.52e7N/m, theta=6.578N/V, A=19.1 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0 5 10 15 20 25 30
Fig.9 Experimental step response of the stage
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0 5 10 15 20 25 30