台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-1-
微致動器原理與應用技術 微致動器原理與應用技術
Principle of Microactoator and its Applications
楊 啟 榮 博士
教 授
國立台灣師範大學 機電科技學系
Department of Mechatronic Technology National Taiwan Normal University
Tel: 02-7734-3506 E-mail:[email protected]
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-2-
綱 綱 要 要
z 微致動器的定義與發展演進
z 微致動器原理與應用
靜電式致動器
壓電式致動器
熱電式致動器
介質加熱式致動器
形狀記憶合金式致動器
電磁式致動器
其他致動器
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-3-
感測與致動原理 感測與致動原理 感測器 感測器
致 致( (
非非制) 制 )動器 動器
將一物理量(力、位移、角度、振動、音波、流量、溫度)或化學量(
化學成份、pH值、濃度、鹽度、黏度、密度、比重)的變化轉換成 電性輸出,如將力、位移或角度的變化轉變成電壓、電容或電阻的 變化量。
與感測器相反,將某一種能源作為輸入,產生物理量的變化,如引 擎、馬達。
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-4-
致動器的角色 致動器的角色
例:電風扇 例:電風扇
例:冷氣例:冷氣
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-5-
致動器
actuators
致動器
actuators
感測器陣列
sensors array
感測器陣列
sensors array
微處理器
microprocessor
微處理器
microprocessor
輸入/輸出
input/output
輸入/輸出
input/output
內部匯流排internal bus
外部匯流排
external bus
微系統應用晶片模組感測訊號
物理 Physical 化學 Chemical 生化 Biochemical
能源 Energy
熱能 Thermal 機械 Mechanical 流體 Fluidic 光學 Optical 電能 Electrical
情報資料
電氣 Electrical 光學 Optical 聲學 Acoustic
致動訊號
消費性電子 生化醫療 自動化 半導體 化工 通訊與資訊 環保與安全 紡織
微機電系統之訊號傳輸與致動控制架構圖 微機電系統之訊號傳輸與致動控制架構圖
運動 能量
訊息 其他
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-6-
整合感測器、致動器及電子電路的微機電元件 整合感測器、致動器及電子電路的微機電元件
感測器
sensors
致動器
actuators
電子電路
circuits
微結構
microstructure
致動器actuators
驅動迴路
driver
力感測器
force sensor
電子電路
circuits
雷射偵測器
laser detector
訊息控制迴路
communication
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-7-
Micro actuators in nature Micro actuators in nature
Eagle
Honey bee
Waterspider Ciliate
纖毛蟲
淡江金探子-拍翼式微飛行器(google影片) Flapping micro aerial vehicle (
MAV
)蜂鳥偵察機
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-8-
人類奈米級致動器的範本之一
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-9-
微致動器的定義與發展演進 微致動器的定義與發展演進
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-10-
1. 1947 年電晶體的發明,使固態元件取代了所謂的機械開關,也就是由半導
體元件將原來會造成可靠度或反應速度緩慢的機械動件(moving part)(傳統 機械元件的缺點),取而代之。
2. 隨著微機電領域逐漸成熟,製造與量測技術不斷改良下,許多機械元件的 性能大幅度地提升。
z 微米尺寸的機械元件可具有高達MHz 的動態特性,而在奈米技術的協助下
,機械元件甚至可進一步達到GHz 的動態特性。
z 利用半導體製程技術製造的薄膜,具有抗疲勞的優越特性,提高可靠度。
3. 當初發展電晶體和半導體加工技術的科學家可能萬萬沒想到,原來被用來 取代機械動件的技術,卻在數十年後,被大量用來製造機械動件,也為科 技發展史譜下一段有趣的插曲。
固態開關
固態開關 vs. 機械開關 vs. 機械開關
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-11-
機械微小化或薄膜化所提升的性能 機械微小化或薄膜化所提升的性能
(1) 微小化後結構撓性提升
由於桿件的彎曲剛性與厚度的三次方成正比(即物體愈厚,愈不容易彎曲),因 此當桿件薄至微米等級時,其可以達到的撓度是非常可觀的。舉例而言,玻璃 製成的餐具相當容易破裂,但是玻璃光纖卻可以彎曲,又例如要將鋁箔折斷是 相當困難的。換句話說,微米尺寸的機械結構其撓性極大,所以當結構以小幅 度的往復運動時,其承受的應力是非常小的。
(2) 薄膜材料的特性
構成微結構的薄膜材料,不是由塊材(bulk material) 所採用的傳統冶金方式所 提煉,而是利用在潔淨室中進行的半導體製程,以物理或化學的方式,將原子 一層層堆疊而成,因此和塊材相比,薄膜材料在製備的過程中具有較少的缺陷
。另外,由於薄膜材料原子堆疊的層數遠小於塊材,又再次減少薄膜材料內部 缺陷的數目。由於薄膜材料可顯著地降低內部存在的缺陷數目,使得微結構承 受交變應力後,不至於因為這些少量的缺陷遷移至表面而導致破裂,使得微機 械結構不易觀察到疲勞破壞的現象。
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-12-
微機械結構具有相當優越的使用壽命,一則是因為微小化後的力學行為,一則 是因為薄膜的材料性質,在經過適當的設計法則驗證過後,應能如同固態元件 般具有卓越的可靠度。此外,微機械動件比固態元件有更佳的性能,例如:光 的方向變換、電磁波傳遞有較小的插入損耗(insertion loss)、可傳遞力和位移等 機械動作。因此,由微機電技術所提供的機械動件,在某些特定的應用上將扮 演一個重要的、不可取代的角色。
微機械元件性能優於固態元件之處 微機械元件性能優於固態元件之處
德州儀器DMD 產品測試報告:
1.
一組包含30 多萬個微面鏡的DMD,以50 kHz 的操作頻率對微面鏡進行驅動(正 常操作頻率5 kHz )。2.
在經過19000小時的測試後,每面微面鏡的操作週期皆達到1012 以上。3. 30 多萬個微面鏡中,僅有一微面鏡因黏著現象而無法繼續操作,並沒有任何微
面鏡因扭轉軸產生破壞。4. DMD 在正常操作下具有二十年以上的壽命,並且經過妥善的包裝後,該元件
也能通過包含摔落的嚴格環境測試。台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-13-
Digital Mirror Display
Digital Mirror Display (DMD) (DMD) / Digital Light Processing / Digital Light Processing (DLP) (DLP)
Texas Instruments 15 μm
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-14-
何謂微致動器 何謂微致動器? ?
z 驅動元件能達到微米(μm) 之運動精度
z 驅動元件之尺寸在微米級 (1-1000 μm)
微致動器為MEMS中驅動力的來源,亦是MEMS由靜態電子系統 或感測系統,轉化為動態機電系統的樞紐。因此在整個MEMS發 展的過程中,佔有主導及關鍵的地位。
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-15-
(a) Feynman viewing the the first micro motor built by William McLellan (left).
(b) The motor, 3.81 mm wide, photographed under an optical microscope.
(Picture credit: Caltech Archives)
Feynman
Feynman’ ’s Challenge s Challenge
大頭針
微致動器
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-16-
There
There’ ’s plenty of room at the bottom. s plenty of room at the bottom.
(這下面空間還大得很呢! ( 這下面空間還大得很呢!) )
1959年物理大師費曼 博士(Dr. Richard Feynman)在美國加州理工學院的演講題目
為什麼我們不能將整套24大本的《大英百科全書》,全部 內容都抄寫在一根大頭針的針尖上…….
微 微/ /奈米科技觀念的啟發 奈米科技觀念的啟發
(1965
(1965年獲得諾貝爾物理獎,被尊稱為微
年獲得諾貝爾物理獎,被尊稱為微//奈米科技之父
奈米科技之父))
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-17-
z Transistor by Bell Lab 1947
z Integrated circuit by Kilby 1958
z Mini motor by McLellan 1960
z Silicon pressure sensor 1962
z Resonant gate transistor 1965
z Silicon membrane 1966
z 1st commercial RAM (Intel, 256 bit) 1969
z 1st Micro processor (Intel, 2300 transistors ; 1971
7.5M transistors for Pentium II at 1997)
z Silicon pressure transducer 1973
z Micro mirror 1975
MEMS MEMS發展歷史的演進 發展歷史的演進
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-18-
z Gas chromatography 1975 z Ink jet nozzle 1977 z Micro-relay 1978
z Micromachining named by Petersen 1982
z LIGA by Becker et al 1982
z Sacrificial layer 1983
z Silicon mass flow sensor 1984
z MEMS named after three work shops 1987
z Electrostatic micro-motor 1988
z Comb drive (1st linear microactuator) 1989
z Micromachined accelerometer by Analog Device 1991
z Electromagnetic micro-motor 1992
z Digitial Mirror Device commercialized by TI 1996
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-19-
微致動器運動的方式 微致動器運動的方式
(a) 同平面式(in-plane)微致動器:運動的方向平行於矽晶片的表面,微致 動器和矽晶片表面的間隙不會改變。
(b) 出平面式(out-of-plane)微致動器:運動的方向接近或遠離矽晶片的表 面,微致動器和矽晶片表面的間隙會隨運動而改變。
(a) (b)
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-20-
間距近接式直線運動靜電致動器 間距近接式直線運動靜電致動器
面積A、氣隙間距d 、電位差V 、空氣的介電常數ε 、彈簧剛性ky、等效質量m
(必須注意靜電吸附(pull in effect)問
題,即電極移動距離必須小於d/3)
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-21-
間距近接式扭轉運動靜電致動器 間距近接式扭轉運動靜電致動器
如果驅動的簡諧波Vcosω t 的頻率ω 和致動器彈簧與質量塊系統的自然頻率fn 或者ft一致時,該致動器將產生一個相當大的輸出,此即所謂的共振現象,此 時致動器將扮演一個機械共振器(resonator) 的角色。
(by torsion bar)
(電極表面最好加絕緣層)
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-22-
致動基本原理 致動基本原理
微 致 動 器 技 術
電磁式
靜電式
壓電式
電歪式(結構類似壓電材料)
橡膠製致動器
熱能式 磁歪式
微梳狀致動器(micro comb actuator)
可變電容微馬達(variable capacitance micromotor, VCM) 類靜電感應微馬達(electrostatic induction micromotor, EIM) 諧振馬達(wobble motor, harmonic motor)
微隔膜泵浦(micro membrane pump) 靜電開關(electrostatic switch)
熱膨膠利用型—雙金屬式、流體熱膨脹式 熱氣力致動器(thermopneumatic) 金屬氧化物(metal hydrides) 熱動力引擎(stirling engine) 形狀記憶合金 伸縮型— 加壓收縮、伸長 彎曲型— 一維及多維自由度 積層式電動器(stacking) 雙形致動器(bimorph) 超音波馬達—直線式、旋轉式馬達 衝擊驅動機構(impact drive mechanism)
micro gripper micro manipulator skeleton muscle type (骨骼) mollusk(軟組織)
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-23-
致動基本原理 致動基本原理 (續 ( 續) )
微 致 動 器 技 術
磁性流體
電氣黏性流體
光能型
機械化學式(mechanochemical)
電化學效應
流體壓力致動器(fluid pressure actuation) 人工筋肉
人工纖毛 光-熱-力型 光-熱-流體壓力變換型 光-起電壓-力變換型 光-微引擎-氣體動力變換型
流量控制閥 磁性流體人工肌肉
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-24-
流體能
z
壓電式(piezoelectric)z
電磁式(electromagnetic)z
靜電式(electrostatic)z
熱伸長式(thermal expansion)z
記憶合金(shape memory alloy)z
化學式(chemical reaction)z
氣液壓式(pneumatic and hydraulic)電能
熱能
化學能
致動基本原理
致動基本原理 ( (續 續) )
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-25-
R. S. Muller, Berkeley
Functional passive:
Mirror Engine:
Comb actuator
Transmission
Micro optical scanner Micro optical scanner
微動態系統亦可粗略地區分為驅動元件、動力 傳輸機構,以及被動元件。
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-26-
Functional passive:
Mirror
Engine:
Comb actuator
Transmitting mechanism:
Linkage, gear
Sandia National Lab.
Micro optical scanner Micro optical scanner
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-27- 台灣師範大學機電科技學系
C. R. Yang, NTNU MT
-28-
微致動器原理與應用
微致動器原理與應用
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-29-
利用電荷間的吸力和斥力作用順序驅動電極,產生平移或旋轉。
致動原理 致動原理 -靜電式 - 靜電式
缺點:
z
間隙尺寸及精度要求高z
常需高深寬比垂直壁面z
位移量小z
需高電壓 優點:z
間隙越小,出力越大z
製造容易、材料選擇多z
採電壓輸入、控制性佳z
可靠度佳(不似以電流源操作的電 磁及電熱式致動器有熱破壞問題)z
與IC製程相合台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-30-
Parallel
Parallel -Plate Capacitor - Plate Capacitor
A
d E
1. Charge +Q , -Q 2. Apply Gauss’s law
Assumption :
A E Q EA Q
S Q d
s
E
0 0
0
ε ε
ε
=
⇒
=
⇒
=
∫
⋅3.
4.
A d Ed Q l d E V
d0
0 ⋅ = =
ε
= Δ
∫
d A V C Q = ε
0≡ Δ
A d <<
2 2 12 0
0
10 854 . 8
vacuum in the ty permittivi :
m N
C
× ⋅
=
−ε ε
(電容率、介電常數)
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-31-
Atom View of the Dielectric Atom View of the Dielectric
E′ E
↑
∴
↓
∝ Δ =
≡
↓
′ ∴
−
=
C E E
Ed Q V C Q
E E
E E
total total total
1
∵
∵
From
:
rty permittivi
Relative ε
0
= ≥ 1
=
= ε ε r ε ε r initial ; where ε r
final C
d A d
C A
極化 (polarization)
Dielectric material
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-32-
(不同厚度之介電材料串聯後 所產生的電容)
(邊際電場效應)
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-33-
致動原理 致動原理 -靜電式 - 靜電式
V
A LW C = ε d = ε d
C:電容值 L:板長
W:板寬 d:兩板間距
垂直作動
(電容改變量產生非線性變化)) ( d
d d d
C LW Δ
Δ
− +
=
Δ ε
水平作動
(電容改變量產生線性變化)) ( L C L C = Δ Δ
兩帶電平行板
作為感測器的原理
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-34-
Source:
Shinsuke Takimoto, ”International Symposium on Micromechatronic and Human Science ”, 1999,pp.221-226Electrostatic force formula Electrostatic force formula
(運動行程較大) (靜電力較大)
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-35-
Electrostatic force Electrostatic force
V(battery)
Populate charges
-Q +Q Q=CV
Conductor
U
BV C
2
2 1 CV U
c=
Capacitance:
2
2 1 CV U
d C A
c
=
= ε
電位能 A電極板面積 d電極板間距
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-36-
Electrostatic force Electrostatic force
2 2
2 . 1 . 2 1 2 ] [ 1
)]
2 ( [1
2 ) (1
2 1 2 1
CV const
U const
V Q V Q U
V Q Q
V Q Q Q
V Q Q
V Q V Q
V Q CV
U U U
C C O
C O
C O C
B C
B C
B B C
−
=
−
=
−
=
−
=
− +
= +
= +
= +
= +
=
C O B
B C
t B t C O
Q Q Q
Q Q
Q Q Q
−
= +
=
+
=
(=0) (=0)*
B: battery
Q
C = CVB B
B
U Q V
I V W
t
=t
= =台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-37-
Electrostatic force Electrostatic force
2
2 . 1 .
2 1
CV const
U const
V Q V Q U
C C O
−
=
−
=
−
=
1. Comb-drive actuation:
2. Gap Closing:
V
x
z h
z U z F U
x U x F U
C z
C x
∂
= ∂
∂
− ∂
=
∂
= ∂
∂
− ∂
=
垂直作動 水平作動
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-38-
Comb- Comb -drive actuation drive actuation
Comb-drive actuation: move at x-direction
x
z : cancel out
: add up
• positive
• independent of x
• F ∝ V
2• force generates from fringe field at finger tip
) 2 )(
(1 2 ) (1
2 ) (1
2 2 2
z V h
z V hx x x CV
x U x F U
o o
C x
⋅
=
∂
= ∂
∂
= ∂
∂
=∂
∂
−∂
=
ε ε
aspect ratio
basic force unit
× (finger No.)
A
d (注意設計原則!如何使靜
電力愈大,驅動電壓愈小)
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-39-
Driving force and displacement Driving force and displacement
Laterally driven Laterally driven
) 2 )(
( 1
2z V h F
x= ε
o⋅
aspect ratio basic force unit
× (finger No.)
高深寬比結構,在面型微加 工製程下,並不太符合
注意彈簧剛 性的差異
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-40-
Comb drive actuator Comb drive actuator
Laterally Driven Resonant Microstructures, W. C. Tang et al., Sensors & Actuators, 20 (1989) 25
Comb-driver
zParallel force
(感測端) (驅動端)
(接地端)
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-41-
(感測端) (驅動端) (感測端) (驅動端)
調整頻率(濾波器) 調整頻率(濾波器) 調整電容(可變電容)
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
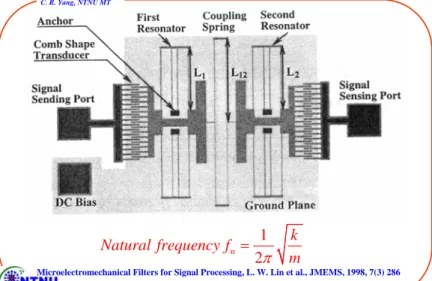
-42- Microelectromechanical Filters for Signal Processing, L. W. Lin et al., JMEMS, 1998, 7(3) 286
1
n
2 Natural frequency f k
π m
=
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-43-
Conceptual diagram of a coupled
Conceptual diagram of a coupled- -series N series N- -resonator filter resonator filter
Figure shows springs kijlinking two adjacent resonators having masses Miand Mj and springs kiand kj. In contrast to the frequency response of the uncoupled single resonators, the filter in Figure can be configured to have an improved bandpass characteristic by proper selection of resonators, coupling springs, and bridging springs which link nonadjacent resonators (note that bridging springs have not been drawn in Figure). Hence, higher order systems with multiple-coupling springs enable synthesis of high-quality bandpass filters. Signals, in the form of current or voltage, are converted by an input electromechanical transducer into mechanical vibrations at the filter, pass through the series filter, and are then converted back into electrical signals by an output electromechanical transducer. For example, magnetostrictive( 磁 致 伸 縮 的 ) and piezoelectric transducers are commonly used in conventional mechanical filters.
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-44-
Linear comb drive actuator Linear comb drive actuator
z
Parallel force
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-45-
W. Tang et.al., 1989
Angular comb
Angular comb- -drive actuator drive actuator
MCNC, USA
Gyroscope (陀螺儀)
陀螺儀應用領域很廣,例如輔助GPS定位、光學防手震(振)補償、3D遙控器等
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-46-
利用彎曲梳狀電極之旋轉式致動器
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-47-
斜齒型梳狀致動器之 外形與尺寸設計
θ
0
3
g
Xm(最大位移) 位移大
出力小
位移小 出力大
位移變大(相較於平行板電極) 出力變大(相較於梳狀電極)
避免pull-in之 最大電極閉合 距離
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-48-
J. Hsieh, and W. Fang, the ASME IMECE, New York, NY, 2001
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-49-
• positive
• dependent of x
• F ∝ V
22 2
2 2
2
1 1
( ) ( )
2 2
1 1
( )( ) ( )( )( )
2 2
C z
o
o o
U F U
z z
C V V h x
z z z
h x h x
V V
z z z
ε
ε ε
∂
= −∂ =
∂ ∂
∂ ∂
= =
∂ ∂
= ⋅ = ⋅
aspect ratio
basic force unit
× (finger No.)
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-50-
Driving force and displacement Driving force and displacement
gap
gap- -closing drive closing drive
注意彈簧剛 性的差異
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-51-
Source: Kevin A. Shaw, “Transducers” ,1993, pp.210-216 z Vertical force
致動原理 致動原理- -靜電式 靜電式
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-52-
Simulation Simulation
3
3- -D model of the comb drive D model of the comb drive
若能在大學或研究所時代,就學會至少一套專業 工程分析軟體,對未來職場將有極大的助益。
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-53-
Charge distribution Charge distribution
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-54-
Displacement magnitude Displacement magnitude
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-55-
Stress distribution Stress distribution
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-56-
Mode analysis Mode analysis
z
By applying a pressure at the left surface of the fingers
mode1
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-57-
mode2
mode3
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-58-
Resonant frequency Resonant frequency
Harmonic analysis Harmonic analysis
z
By applying a 0.01 Mpa harmonic force at the left surface of the comb drive
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-59-
(a) 體型微加工技術、(b) 面型微加 工技術製造之微扭轉式致動器
1.
驅動電壓和活動空間二 者相互牽制的問題。2. 靜電力和間距是非線性
的關係,衍生靜電吸附(pull in)問題。
垂直力
平行力
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-60-
z由於垂直靜電力與兩電極間距離之平方成反比,而結構的彈性回復力 則隨兩電極間距離之減少而線性增加(虎克定律),亦即當兩電極受靜電 力相互吸引而拉近時,其靜電力是隨距離減少的平方增加,而彈性回 復力則隨距離減少的一次方增加,因此靜電力的增加率較彈性回復力 的增加率大許多。
z當施加在兩電極上的電壓差增加,便會使兩電極之間距減少,當電壓 增加至一極限值時,結構本身的彈性回復力便無法與靜電力抗衡,造 成兩電極彼此吸引至接觸,而此一極限電壓就稱為吸附電壓VPI。 z以靜電力驅動的元件,受靜電吸附的影響很大,例如在作為致動器時
,若操作電壓大於吸附電壓,結構會瞬間被吸附至固定電極(Pull-in effect),因此限制了致動器的操作範圍(電極間距離的1/3)。
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-61-
Pull
Pull- -in effect in effect
Pull-in occur at 0
3 2 g g
PI=
g
0: the gap at zero volts and zero spring extension
A V
PIkg
ε 27 8
03=
Pull-in voltage
Stephen D. Senturia, "Microsystem Design", 2001
1/3台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-62-
High
High- -Power and High Power and High- -Efficiency Electrostatic Ac Efficiency Electrostatic Actuators tuators
(Niino, Egawa, and Higuchi, 1993)
1 2 3 1 2 3
1 2 3 1 2 3
1
2 3
1 2
3
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-63- 台灣師範大學機電科技學系
C. R. Yang, NTNU MT
-64-
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-65-
Source: G. Engelmann, ″J. Micromech. Mmicroeng. ″, 1994, pp.152-154
致動原理- 致動原理 -靜電式 靜電式
z Electrostatic Micromotor (UV LIGA process)
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-66-
靜電式馬達驅動原理 靜電式馬達驅動原理
2W/3
stators sliders
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-67-
旋轉式微馬達 旋轉式微馬達
Side Side -drive - drive micromotor micromotor
12 stators, 8 sliders
1
1
1 2 1
2
2 2
3
3
3
3
順時針轉:1→2→3;逆時針轉:3→2→1
(Surface micromachining process) (MUMPs process )
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-68-
z 梳狀致動器應用( I ) (SOI process)
Juan and Pang, J. MEMS, 1998
致動原理– 致動原理 –靜電式 靜電式
Cornel Marxer and Nicolaas F. de Rooij J. of Lightwave Technology, 17(1), 2-6, 1999
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-69-
z 梳狀致動器應用(II) Micro scanner
致動原理– 致動原理 –靜電式 靜電式
Electrostatic Combdrive-Actuated Micromirrors for Laser-Beam Scanning and Positioning
M. H. Kiang, et al., J. MEMS, 7, 27 (1998).
Vertical Scan Horizontal Scan (Surface micromachining process)
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-70-
Sandia National Lab.
致動原理
致動原理 – – 靜電式 靜電式
z 梳狀致動器應用– Gear train
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-71-
致動原理 致動原理 – – 靜電式 靜電式
z 梳狀致動器應用– Vibromotor
Lee, Ljung, and Pisano, 1992
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-72-
Droplet Generator by Electrostatic Actuation Droplet Generator by Electrostatic Actuation
孔口
蓄水池
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-73-
靜電式垂直致動型 靜電式垂直致動型
出平面致動器 出平面致動器
謝哲偉, 清華動機博士論文, 2002
光掃描元件
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-74- M.-L. Tsai, J. Hsieh, C.-C. Chu, and W. Fang, IEEE Optical MEMS’02, 2002
光衰減器
Variable optical attenuator (VOA)
Variable optical attenuator (VOA) 利用槓桿放大位移台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-75-
微機電式可調光衰減器
微機電式可調光衰減器(Variable optical (Variable optical attenuator, VOA)
attenuator, VOA)製作技術 製作技術
(1) 面型微加工技術
(2) 體型微加工技術 (3) SOI製程技術
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-76-
靜電平板槓桿放大致動器 靜電平板槓桿放大致動器
H.
H.- -Y. Lin, H. Y. Lin, H. Hu Hu, and W. Fang, , and W. Fang, Transducers Transducers’ ’01 01, Munich Germany, 2001 , Munich Germany, 2001
間距近接式電極台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-77-
H.
H.- -Y. Lin and W. Fang, the Y. Lin and W. Fang, the ASME IMECE, ASME IMECE, Orlando, FL, 2000 Orlando, FL, 2000
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-78-
H.-Y. Lin, M. Wu, and W. Fang, Transducers’01, Munich Germany, 2001
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-79-
Scratch Drive Actuator (SDA) Scratch Drive Actuator (SDA)
(a)
(b)
(c)
(突塊)SDA 結構之主體為摻雜磷的多晶矽平板以及位於平板前端的突塊(bushing),而 支撐樑的作用則為使結構得以懸浮於矽晶片表面,驅動系統部分的上電極為結 構本身,下電極則為低阻值的矽晶片,兩者中間有絕緣層。
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-80-
以輸入之電壓訊號為方波脈衝時為例,假設脈衝之峰值為± Vp,當電壓上 升(由0 至Vp)時,平板受靜電力的作用而往下被吸附,因突塊的存在使得 平板不會全部與基材上的絕緣層接觸,此時平板以突塊為支點呈現翹曲 (warping) 的狀態,能量暫時以形變能的形式儲存,如圖(a) 所示。當電壓 下降(由Vp 至0),所儲存的形變能逐漸被釋放,平板試圖回復其初始形狀
。此時平板與基材接觸的區域減小,圖(b) 中之L1 即為平板與基材接觸部 分之長度。由於突塊仍與基材表面接觸而有摩擦力存在,因此平板末端部 分將以突塊為支點而往前收縮。當電壓再度上升(由0 至–Vp),平板再次 往下被吸附,因平板末端部分與基材間的距離較小,故較先被吸附至基材 表面。因平板的變形將導致突塊的頂端往前推擠,突塊將沿著基材表面滑 移,如圖(c) 所示。持續此一步進式運動(step motion),則SDA 可在矽晶 片表面移動一長距離之行程。
SDA 的動作原理 SDA 的動作原理
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-81-
T. Akiyama, Sophia Univ.,1992
吳嘉昱, 清華動機碩士論文, 2002
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-82- z 可變電容是重要的被動元件之一,又稱為變容器(varactor),是以靜電形式
儲存及釋放電能,常應用於可調式匹配網路、電壓控制振盪器(voltage- controlled oscillator, VCO) 、 可 調 式 濾 波 器 、 低 雜 訊 放 大 器 (low-noise parametric amplifier)和諧調頻率產生器(harmonic frequency generator)等,
也常與電感搭配而組成可調式共振電路。
z 可變電容具有下列性能指標:未偏壓電容值(unbiased base capacitance)、可 調比例(tuning ratio) 、操作電壓、品質因子(quality factor)、等效串聯電阻 (equivalent series resistance)、寄生電感(associated inductance)或自我共振 (electrical self-resonance)與線性度(linearity)等。
(
(微機械式 微機械式) )可變電容之簡介 可變電容之簡介
被動元件(Passive Components)的定義是,電子產品本身無法主動提供電子 相關起動、開關、速度及功能控制之運作,相關提供之被動功能係配合電子主 動元件運作的零組件通稱為被動元件,依功能上的差異可分為電感、電阻、電 容器等。
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-83-
Capacitive sensing or variable
Capacitive sensing or variable capacitor capacitor
ε2
Gap-tuning Gap-tuning
Area-tuning Area-tuning Dielectric Tunable
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-84-
Quality factor Quality factor
Q is a measure of the loss of a microwave circuit.
Definition :
loss/sec.
energy
stored energy average ω
Q
=品質因子是用來評估電容的能量損耗程度,定義為平均儲存能量與能量 損失功率的比值
電容會產生自我共振頻率(self-resonant frequency, ),其數學式如下:
在此頻率下,電容的總阻抗將受到串聯電感Ls的支配(dominate),因此在 設計可變電容時,讓串聯電感Ls愈小愈好,使自我共振頻率f s 能夠比輸入 訊號頻率大很多,如此可變電容便可穩定地操作。
C f L
s
s
2 π
= 1
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-85-
1
s s
Z R j L
ω C ω
⎛ ⎞
= + ⎜⎝ − ⎟⎠
C L
sR
sA discrete capacitor series model:
Assumption :
Impedance:
( ) ( )
s sR L C Z
Q Z ω ω1
Re
Im −
=
=
CR
sQ ω
≅ 1
∴
L
sC
ω << ω 1
Gabriel M. Rebeiz, "RF MEMS", 2003
其中R即為等效串聯電阻,在實際電路中是無法忽視的,若R愈小,使得電能 損耗愈少,則Q值就愈大,故可變電容在電路中表現出的性能就愈好。
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-86-
A : area of the electrode d : gap of the electrode
d C = ε A
ε : permittivity of the dielectric
1. MEMS Gap-tuning Capacitors (1) Electrostatic tuning
(2) Electro-thermal tuning (3) Piezoelectric-actuator tuning 2. MEMS Area-tuning Capacitor 3. MEMS Dielectric Tunable Capacitor
Capacitive sensing using MEMS device Capacitive sensing using MEMS device
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-87-
Top view 2 × 2 capacitor array
1. MEMS Gap
1. MEMS Gap- -tuning Capacitors: tuning Capacitors: Electrostatic Tuning Electrostatic Tuning- -(1) (1)
d C V
Spring k
Fixed plate Suspended
plate
Darrin J. Young, et al, Solid-State Sensor and Actuator Workshop, 1996
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-88-
Electrostatic Tuning Electrostatic Tuning- -(2) (2)
Aleksander Dec, et al, IEEE, 1998
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-89-
Electrostatic Tuning Electrostatic Tuning- -(3) (3)
Maher Bakri-Kassem , et al.
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-90-
Electro
Electro- -Thermal Tuning Thermal Tuning- -(4) (4)
Kevin F. Harsh, et al.
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-91-
Piezoelectric
Piezoelectric- -Actuator Tuning Actuator Tuning- -(5) (5)
Jae Y. Park, et al.
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-92-
2. MEMS Area
2. MEMS Area- -Tuning Capacitors Tuning Capacitors- - (1) (1)
J. Jason Yao, et al.
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-93-
tuning ratio 31:1
MEMS Area
MEMS Area- -Tuning Capacitors Tuning Capacitors- - (2) (2)
H. D. Nguyen, et al.
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-94-
3. MEMS Dielectric Tunable Capacitor 3. MEMS Dielectric Tunable Capacitor
Jun-Bo Yoon, et al. [8]
Minimum capacitance
Maximum capacitance
• Q factor = 290
• Dielectric layer: Si
3N
4• permittivity: 6-9
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-95-
good high
large
μmachinedtunable capacitor
bad low
small
Solid state varactorLinearity Q factor
Tuning range
Tunable capacitor
lowest -
lowest
Gap-tuning(electrostatic)
- highest highest
Movable dielectric
highest -
-
Area-tuningCost Q factor
Complexity
Tuning types
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-96-
新型微機械式可變電容之設計與製作 新型微機械式可變電容之設計與製作
A novel design and fabrication of
A novel design and fabrication of micromachined micromachined tunable capacitor
tunable capacitor
Spring k
Fixed plate Suspended
plate
d Fe
Fm
y
0
ε ε
rε
0 01 2
i r
r
C lw
d d
ε ε ε
= +
Initial capacitance l
d
1d
2w
Upper electrode Movable structure Lower electrode
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-97-
lower electrode
upper electrode sacrificial layer SU-8 structure
3- 3 -D schematic entire view D schematic entire view
Before release After release
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-98-
Fabrication process Fabrication process
(a) Thermal SiO
2&
Lower electrode (Ti/Au)
(b) Sacrificial layer (PR)
(c) SiO
2deposition
(d) SU-8 patterns
(e) Upper electrode (Cu/Ni)
(f) Structure released
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-99-
Confirmed device fabrication Confirmed device fabrication
Top view Enlarge a part of the device
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-100-
致動原理- 致動原理 -壓電式 壓電式
利用壓電材料的逆電壓效應,外加電壓而產生形變,將電能轉 換成機械能。V →ε
優點
◎反應速度極佳
◎出力大
◎穩定的微小位移輸出
缺點
◎與IC製程不合
◎不易製作成微米尺寸
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-101- 台灣師範大學機電科技學系
C. R. Yang, NTNU MT
-102-
致動原理– 致動原理 –壓電式 壓電式
壓電薄膜微懸臂樑致動器之結構示意圖
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-103-
一般製作具壓電性質的薄膜有數種材料,包括氧化鋅(
ZnO),鈦酸鉛(PbTiO
3),鋯鈦酸鉛(一般稱作PZT壓電材料,Pb(Zr
xTi
1-x)O
3)。其中以PZT壓電材料系列
之壓電性質較佳。壓電薄膜材料 壓電薄膜材料
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-104-
壓電薄膜製造程序 壓電薄膜製造程序
z 第一類為物理性的氣相的堆積(Vapour Phase Deposition)
電子槍蒸鍍(E-Beam Evaporation)RF濺鍍(RF Sputtering)
z 第二類則為液相的堆積法(Liquid Phase Deposition)
溶凝膠法(Sol-Gel)有機金屬堆積法(Metallo-Organic Decomposition, MOD
)
這兩大類程序相較之下,後者具有在製程上(1)較低的處理程序溫度,(2)初始原 料混合均質,(3)所需設備較簡單,三大優點;但在製成薄膜性質方面,後者需謹 慎控制程序以避免在薄膜上發生裂紋,為其主要缺點。
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-105-
溶凝膠法(Sol-Gel)是矽氧化物或金屬氧化物從溶液狀態到形成膠 體(gel)狀態的一種反應過程。在溶膠-凝膠的合成過程中,前驅 物 從 溶 液 狀 態 經 過 水 解 、 縮 合 、 聚 合 等 反 應 後 , 逐 漸 凝 固
(gelation)而形成膠體的狀態,凝固後成為具有多孔性、高表面積
的網狀結構。溶凝膠法(Sol 溶凝膠法 (Sol- -Gel) Gel)
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-106-
有機金屬堆積法 有機金屬堆積法(MOD) (MOD)
醋酸鉛 鈦丁醇 醋酸鋯
甲銑胺 預備溶液 二甲基乙醇
500~800℃
300~500℃
約200℃
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-107-
致動原理 致動原理– –壓電式 壓電式
(a) Operation principle of a piezoelectric- actuated continuous droplet generator.
(after Buchner et al., 1997.)
(b) Operation principle of a piezoelectric- actuated droplet-on-demand droplet generator. (after Lee et al., 1984.)
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-108-
致動原理 致動原理– –壓電式 壓電式
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-109-
致動原理
致動原理– –壓電式 壓電式
(DENSO CORPORATION, 1997)
Tube Inspection Robot
(運動的)
前進:
頭部慢伸(靜摩擦力>慣 性力)、尾部快縮(靜摩 擦力<慣性力) 後退:
頭部慢縮(靜摩擦力>慣 性力)、尾部快伸(靜摩 擦力<慣性力)
(前進) (後退)
Cramp
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-110-
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-111-
致動原理- 致動原理 -熱伸長式 熱伸長式
利用溫度變化而產生形變 △L= α L △T
優點
◎出力大
◎可採電流輸入,使用容易
◎製作容易,與IC製程相合
◎配合機構(如雙層結構),易放大位移量
◎尺寸及精度要求不高
缺點
◎易有殘留應力及sticking的問題
◎易受環境溫度影響
◎溫度太高,會融化或產生永久變形
◎反應速度低
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-112-
Features :兩層材料不同熱膨脹係數,△L= α L △T 垂直運動
Bimorph Beam
熱伸長式 熱伸長式 – – 垂直運動 垂直運動
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-113-
應用- Ciliary (纖毛的) motion
Fujita, J. MEMS, 1993
熱伸長式 熱伸長式 – – 垂直運動 垂直運動
注意On-Off位置與纖毛結構之運動變化
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-114-
Fujita, J. MEMS, 1993
Fabrication sequence of cantilever actuators.
(a) The 1.6-μm-thick Al (sacrificial layer) is patterned. The first 2.2-μm-thick polyimide is coated and patterned. The adhesion layer (Cr) and the metal microheater (Au-Ni) are deposited. The microheater is patterned, (b) The second 3.6-μm thick polyimide is coated, Ni (RIE mask) is patterned. (c) After etching of polyimide by O2 plasma. (d) Released structures.
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-115-
應用- Ciliary (纖毛的) motion
Fujita, J. MEMS, 1993
熱伸長式
熱伸長式 – – 垂直運動 垂直運動
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-116-
熱伸長式 熱伸長式 – – 垂直運動 垂直運動
z 應用- Micro cage
C. J. Kim, UCLA
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-117-
Active component
Active component - - Electrothermal Electrothermal actuator actuator
z
Mono layer –long life time
z
Bi-direction (DC mode)
z
High frequency (AC mode)
MDL, NTHU
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-118-
MDL, NTHU
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-119-
MDL, NTHU
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-120-
MDL, NTHU
Application
Application - -2D scanner 2D scanner
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-121-
致動原理– 致動原理 –熱伸長式 熱伸長式
z 水平運動-粗細(冷熱)臂式
Guckel e.t al., 1992
Features :兩臂等長不等寬,△L= α L △T
Direction of motion
Hot arm Cold arm Dimple Gap
Flexure
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-122-
熱伸長式– 熱伸長式 –水平運動 水平運動
z 長短臂式
(Pan and Hsu J. Micromech. Microeng., 7, (1997 ), 7-13)Features : 兩臂等寬不等長, △L= α L △T
Initial open state
Initial close state
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-123-
z 曲臂式 Y. B. Gianchandani, J. MEMS, 10(2), 2001
熱伸長式 熱伸長式 –水平運動 – 水平運動
Features :利用斜角,放大位移
Basic Bent Beam ActuatorA rotary actuator based on orthogonal cascaded bent-beam elements.
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-124-
利用彎曲或是挫曲來放大熱形變量
利用彎曲或是挫曲來放大熱形變量
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-125-
Thermal
Thermal -Buckling Actuation - Buckling Actuation
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-126-
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-127-
側向作動型陣列微致動器之應用
側向作動型陣列微致動器之應用
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-128-
優點
◎出力大
◎可採電流輸入,使用容易
◎加熱電阻製作容易,與IC製程相合
缺點
◎密封問題
◎易受環境溫度影響
◎溫度太高,會融化或產生永久變形
◎需與結合技術配合
◎反應速度低
利用加熱介質(如空氣或液體),使介質體積變化而產生驅動力。
致動原理 致動原理– –加熱式 加熱式
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-129-
致動原理– 致動原理 –加熱式 加熱式
微蒸汽機Micro Steam Engine (Sandia National Lab.)
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-130-
致動原理 致動原理 –加熱式 – 加熱式
氣泡式噴墨印表頭 Thermal Bubble Inkjet Head (Tseng et al, UCLA, 1998) Droplet ejection
Tail cutting
Commercial Inkjet Microinjector
HP 51626A Printhead
Nozzle: 60 μm Droplet: 50 μm Frequency: 8 kHz
Nozzle: 40 μm Droplet: 45μm Frequency: 18 kHz
Fastest one Nozzle: 10 μm Droplet: 12 mm (0.9pl) Frequency: 33 kHz Speed: 10 m/s Fastest one in market
Nozzle: 20 μm Droplet: (5 pl) Frequency: 12 kHz Speed: 10 m/s
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-131- 台灣師範大學機電科技學系
C. R. Yang, NTNU MT
-132-
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-133-
Pneumatic
Pneumatic microgrippers microgrippers
Pneumatically microgripper
Ref: Sebastian Butefisch et al., Sensor and Actuator A, 2002
Pneumatically microfinger
Ref: C. J. Kim et al., Transducers ’03, 2003
(放氣) (充氣)
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-134-
記憶合金(Shape memory alloy, SMA)受熱或冷卻,可從 變形狀態恢復到初始幾何形狀,而產生位移及驅動力。
優點
◎出力大
◎可用小電流驅動,使用容易
◎對人體無毒性傷害
◎機構安靜、簡單,容易設計
缺點
◎與IC製程不相合
◎精度較差
◎製作微米尺寸不易
◎反應速度低
◎應變回復特性會因疲勞而降低
致動原理 致動原理 –記憶合金 – 記憶合金
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-135-
致動原理 致動原理 – – 記憶合金 記憶合金
SMA microarm (Yamaguchi University, 1993)
SMA made of TiNi Austenite tem.
T
Af= 57℃
Martensite temp.
T
Mf= -9.1 ℃
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-136-
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-137-
Thermal
Thermal microgrippers microgrippers
Shape memory alloy (SMA) of microgripper
Ref: Abraham P. Lee et al., Sensors and Actuators A, 1996
TiNi SMA microgripper
Ref: I Roch et al., J. Micromech. Microeng., 2003
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-138-
Thermal driven, SMA actuation: (TiNi actuation membrane,
polyimide check valve, 5 wafer stack, flow rate 50 μl/min at 0.9 Hz with 0.6V, 0.9 A pulse (0.54 W).
SMA micropump SMA micropump
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-139-
Small Diameter Active Catheter Using Shape Memory Alloy Small Diameter Active Catheter Using Shape Memory Alloy
(Y. Haga, Y. Tanahashi, and M. Esashi, 1998)
台灣師範大學機電科技學系 C. R. Yang, NTNU MT
-140-