行政院國家科學委員會專題研究計畫成果報告
模糊聚類分析在數位影像辨識的應用
Fuzzy Cluster ing for Digital Image Recognition Applications
計畫編號:NSC 89-2213-E011-076 執行期限:88 年 8 月 1 日至 89 年 7 月 31 日 主持人:蔡超人 副教授 國立台灣科技大學電機系
一、中文摘要
本計劃是以 IC 板上晶片的即時辨識系 統為主要的研究目標,在晶片型號字元的 特徵聚類分析上,利用模糊聚類分析法則 配合影像處理的雜訊消除與細線化的方 式,來達到正確的字元分割與聚類中心值 的判斷,而在晶片的邊緣偵測上,則使用 模糊邊緣偵測的理論來辨識晶片的邊緣位 置,並運用三角函數的旋轉公式針對晶片 的傾斜角做反向的旋轉,最後再將上述所 有的理論技術整合建構成一實際的即時辨 識系統。
除了對於數位影像的處理、二度空間 的旋轉、模糊集、模糊聚類分析與特徵抽 取的理論做介紹與分析外,也針對模糊邊 緣偵測理論中門檻值
α
cut的選取、傾斜晶片的角度量測及轉正、字元細線化的處理 與模糊聚類特徵分析的初始參數設定及比 對做實際的模擬,透過模擬的結果討論出 最適合的初始參數設定值,並將所求得的 各參數應用於吾人所建構的系統上,使整 個系統的辨識效果能夠達到最好的效果。
關鍵詞:模糊聚類分析、影像旋轉、晶片 辨識、細線化
Abstr act
The purpose of this thesis is to use fuzzy clustering analytic theory to recognize the characters of the chip. In image processing, we used binary image to determine the chip’s position and applied thinning algorithm to segment characters.
fuzzy-edge operator approach to detect the rim of the chip and to rotate the image by trigonometric formula. A simulated system was created in this thesis and that not only determined the critical value of the fuzzy- edge operator, the range of standard error but also determined the initial value. Finally, we applied all of values and approaches built the system in order to have the best efficiency to recognize the chip.
Keywor ds: fuzzy clustering, image rotation, IC recognition, thinning
二、緣由與目的
近來應用在電腦視覺的研究非常的廣 泛,如指紋辨識、視網膜辨識、人臉辨識、
車牌辨識、衛星光學圖片辨識、字元辨識、
LCD 化學塗料分布的辨識到最近的交通號 誌辨識等各方面,陸續均有許多的研究和 成果。而應用在辨識所使用的方式更是非 常多元,故在經過多年的研究發展後,目 前已經有許多具共通性的基本理論及演算 法被使用。但在許多的研究當中,大部分 的目的依然是以精確度的判斷為主,在時 間的效益上較不考量,因此若想將其應用 在實際的情況上,大部分的研究還是無法 做到。本計劃的目的就是希望運用一些既 有的理論法則,輔以各種技術以及設計的 方法程序,將整個架構結合成一完整的處 理程序,使得整個系統不但能夠辨識物體 的特徵,更能直接套用在線上即時(real time and on-line)的設備中。
本研究是以 IC 板上的晶片作為辨識的 目標物,假設實際在輸送帶傳送的情形
下,透過數位攝影機的拍攝經由影像擷取 卡存放影像資料至記憶體內,再直接由記 憶體讀取影像資料,接著再與樣本晶片的 特徵做比對來達成辨識的目的。所做的研 究是用數位影像處理的方法、數學理論的 物體旋轉、模糊集[1]與模糊聚類分析法則 [2]來達到晶片的位置偵測、晶片影像的旋 轉、晶片邊緣的判斷與字元的特徵辨識。
三、結果與討論
整個系統設計包含兩大課題:電腦的 視覺與知覺,知覺方面主要是根據實際 IC 板上樣本晶片的大小及內部資訊,利用該 資訊找出待測晶片上有意義的特徵資訊,
並輔以各種圖形識別[3-9]的演算法來進行 分群、辨識。而視覺的部份,則根據電腦 知覺所能夠接受的影像需求條件,配合現 有的硬體設備功能,運用影像處理的技術 將實際拍攝的影像轉換成後繼之電腦知覺 系統能夠解讀之影像資料。
影像的邊緣偵測[10-12]與模糊聚類之 特徵抽取[13-15]為本計劃的研究重點,利 用其簡單的運算式及精確的辨識,達到所 要求的即時性功能。然而因本研究強調的 是實際物體的辨識,在面對實際的環境 上,會有很多非預期中的因素發生,如臨 界值的選取與雜訊的處理等,故影像處理 的方法與辨識的法則亦為本電腦視覺系統 的成敗關鍵。如圖一所示,即為本計劃之 晶片即時辨識系統的整個影體設備。
在實際系統建構的模擬中,由於本研 究是以模糊邊緣偵測、角度旋轉、字元的 細線化與分割及模糊聚類分析法則來進行 辨識,針對各相關方法的適用性與實用 性,將以即時法則來對上述的各項論點做 討論,並經由各項法則的實現及不同臨界 值的選取而得到的模擬結果作分析,並選 擇出適當的臨界值。
在模糊邊緣偵測,門檻值α 值選定的cut 模擬中,經由糊邊緣偵測的判斷法則,如 圖二所示,依據各遮罩元素所對應之隸屬 函數,對實際影像做辨識,最後的辨識結 果如圖三所示,並透過結果決定使用之門 檻值α 的值為 0.9,而在晶片字元的細線cut 化處理中,由於細線化的目的只是為了順 利分割所有的字元,以便做為後續的特徵 辨識之用,所以在時間的考量下,決定只 對晶片型號做一次的細線化處理,細線化 結果如圖四所示。
VGA mc
md Meteor card
PCI Bus
Memory ms
ma
Mi(mb)
CCD
圖一 硬體設備示意圖
1.0 0.9 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1
0 1 2 3 4 5 6 7 8
圖二 各遮罩元素對應之隸屬函數 圖
圖三 實際影像之模糊邊緣偵測圖
有關模糊聚類的初始設定值上,模糊 聚類演算法如下
∑∑
∑∑
= =
= =
−
=
=
n
k c
i
i m k ik n
k c
i
ik m ik
z x
d Z
U J
1 1
2 1 1
2
||
||
) (
) ( ) ( )
, (
µ µ
) (
) (
||
||
)
(dik 2 = xk −zi 2= xk −zi TAxk −zi 透過演算法,相同的必須先選定各初始參 數值,由於參數值的選定直接影響整個系 統對各字元聚類中心的絕對差值和大小與 整個辨識系統處理的時間,所以要如何選 擇最適當之初始值也是非常重要的,透過 實際的模擬,根據不同的設定方式,分別 求得最佳的結果,透過此結果,我們設定 初始歸屬強度A1,A2的值分別為 0.9 與 0.1 各一半,即
A
1=[0.9 0.9 0.9 0.9 0.9 0.9 0.9 0.9 0.1 0.1 0.1 0.1 0.1 0.1 0.1]A
2=[0.1 0.1 0.1 0.1 0.1 0.1 0.1 0.1 0.9 0.9 0.9 0.9 0.9 0.9 0.9]而允許誤差值ε 則設定為 0.01,加權指數 m 為 1.7。最後並依據此結果對各字元做實 際的聚類分析,且決定在字元間的絕對差 值和中我們將以 150 為基準,絕對差值和 小於 150 時將其視為同一字元。因此在實 際系統的建構中,也將依照此結果作為基 礎以使系統能達到高的效益,而整個影像 辨識系統的製作流程則如圖五所示。
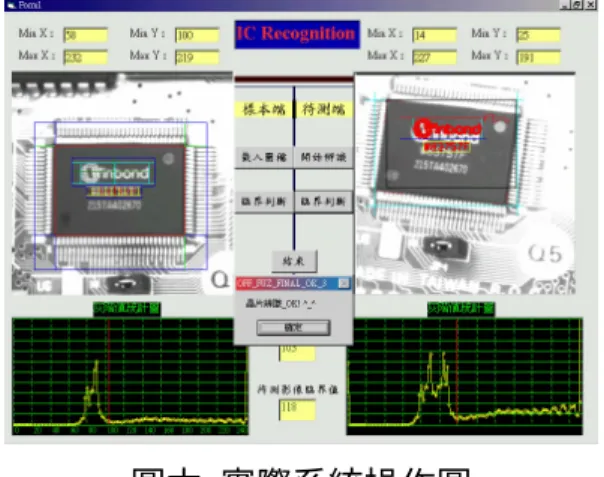
系統建構完成後,針對實際的樣本晶 片來做測試,圖六為實際系統的操作畫 面,當點選”載入圖檔”的按鈕時,系統會 載入樣本圖像,並要求使用者指定辨識的 範圍,當選取好範圍後,再點選”臨界判斷”
按鈕,則系統便能夠透過所點選的範圍,
辨識晶片是否傾斜(左斜 或右斜) Yes No
利用模糊邊緣偵測對晶片的四個 角做辨識
辨識晶片之四個角並判斷其傾斜 的角度
抓取晶片位址
消除雜訊 i=0 , j=0 依據傾斜方向做反方向旋轉
i < IF ISLogoI Yes
No
抓取相對位址並做特 i = i+1 徵值判斷
判斷特徵值是 否相同 Yes
No
Yes No
j = j+1
Yes
No 晶片mark不同
結束
j < ISLogoW
切割各字元並做特徵 值判斷
判斷特徵值是否相同
晶片型號錯誤 晶片大小不符合
Hold影像並自動抓取晶片之大略位址,判斷與 原始影像大小是否差距過大
No Yes
開始
開啟樣本晶片圖示
選定範圍並辨識晶片之位址 ISLogoI=0 ISLogoW=0
是否要辨識晶片之mark
ISLogoI=ISLogoI+1 選取範圍並抓取特徵值
是否還要辨識其它mark Yes
No
Yes No
是否辨識晶片的型號字元
ISLogoW=ISLogoW+1 選取型號範圍
切割各字元 No Yes
是否使用模糊聚類辨識
Yes 利用模糊聚類作各字元的特徵辨 使用二元化作各字元的特徵辨識 識
存放各字元的特徵值 No
是否辨識其它的型號 No Yes
CCD抓取待測型號
圖五 系統製作流程圖 圖四 字元之一次細線化
對樣本晶片作邊緣偵測,存放經由辨識所 得到的樣本晶片的長度、寬度與左上角座 標值。接著選取欲辨識的標誌與型號範 圍,系統將自動辨識標誌與晶片型號的位 置,並對字元型號做二元化處理與分割,
最後再對各字元做特徵抽取與聚類的演 算。
經過實際的測試,很成功的結合所有 相關的理論依據,建構出一實體系統,接 著我們針對實際影像的處理,計算出當待 測晶片為水平、左傾或右傾時,系統辨識 所花的時間。當欲辨識的範圍是一個晶片 標誌與一個晶片型號時,且其型號的字元 有七個,整個處理完成的結果我們將其列 於表一中。
晶片位置 辨識時間(秒)
無傾斜 0.91
左上右下傾斜 1.42 左下右上傾斜 1.25
在整個實作的過程中,我們引用了灰 階影像的二元化、雜訊消除、影像二度空 間的旋轉、模糊理論、模糊聚類分析及影 像特徵抽取等演算法則來實現整個系統,
利用模糊集的理論對晶片的邊緣做偵測,
以人類視覺觀點為基礎的方式,不但在模 擬的結果,更在實際的應用上達到非常好 的效果。對於傾斜的晶片,吾人運用三角 函數旋轉公式,將晶片的影像做正反向的 旋轉。在字元的切割上,利用細線化的方
式,對晶片的字元作細線化處理,使系統 能順利的分割各字元。接著在字元的特徵 抽取上,利用了模糊聚類分析法來對字元 的特徵做聚類的處理,且說明了聚類分析 法則的演進,並模擬了各英文字母之間的 特徵絕對差值和。
四、成果自評
本計劃是利用灰階影像與二元影像之 間的轉換加上影像偵測與辨識的技術,搭 配數位攝影機、影像擷取卡與電腦所結合 的硬體設備,在實際的情況下,結合模糊 聚類分析及三角函數等運算法則,實現了 一個數位影像的辨識系統。由於吾人所建 構的是在線上的即時系統,因此在整個系 統的實現上對時間的考量必須非常的重視
,為了能夠達到所要求的目標,我們對整 個系統的實現上就必須在兩個假設的前提 下執行,第一:假設所拍攝的影像中,除 了欲辨識的晶片外不可有其餘較大的晶片 存在影像中,第二:假設所有樣本晶片上 的標誌與型號都必須是清晰可見的。
經由辨識的結果得知,當系統能夠正 確的辨識出待測晶片的邊緣與清楚的分割 出各字元影像時,整個系統的辨識結果是 可以達到相當精確的效果,在晶片傾斜角 不大於 30 度時,系統的平均辨識率可達 94~96%之間。因此透過本研究所結合的演 算法可成功的建構出一實際的系統,雖然 還有需要改進的地方,但仍希望在此種模 式的依據下,提供爾後在有關即時辨識系 統的研究上,能夠有良好的參考價值。
五、參考文獻
[1] George, J. Klir and B. Yuan, Fuzzy Sets and Fuzzy Logic, Prentice Hall PTR, pp. 357-378, 1995.
[2] Zadeh, L. A., H. J. Zimmmann and B. R. Gaines, Fuzzy Sets and Decision Analysis, North-olland, pp. 3-83, 1984.
[3] Gonzalez, Rafael C. and Richard E. Woods, Digital Image Processing, Addison-Wesley Publishing Company, pp. 81-407, 1992.
[4] Arturo de la Escalera, Luis E. Moreno, Miguel Angel Salichs and Jose Maria Armingol, “Road Traffic Sign etection and Classification,” IEEE
表 7-1 系統平均辨識時間表 圖六 實際系統操作圖
Transaction on Industrial Electronic, Vol. 44, NO. 6, pp. 848-858, December 1997.
[5] Chandrasekaran, S., B. S. Manjunath, Y. F. Wang, J. Winkeler and H. Zhang, “An Eigenspace Update Algorithm for Image Analysis,”
Graphical Models and Image Processing, Vol.
59, No. 5, pp. 321-332, September 1997.
[6] Pyt’ev, Yu. P., A. V. Kalinin, E. O. Loginov and V. V. Smolovik, “On the Problem of Object Detection by Black-and-White and Color Morphologies,”Pattern Recognition and Image analysis, Vol. 8, No. 4, PP. 532-536, 1998.
[7] Otsu, Nobuyuki, “A Threshold Selection Method from Gray-Level Histograms,” IEEE Transcations on Systems, Man, and Cybernetics, Vol. SMC-9, No. 1, January 1979.
[8] Bittanti, S., P. Colaneri and M F. Mongiovi,
“From Singular to onsingular Filtering of Periodic Systems: Filling the Gap with the Spectral Interactor Matrix,”IEEE Transactions on Automatic Control, Vol. 44, No. 1, pp. 222- 227, January 1999.
[9] Park, S. H., S. K. Kim and H. J. Kim, “A Fully Parallel Thinning Algorithm using a Weighted Template,” IEEE Tencon-Digital Signal Processing Applications, pp. 300-303, 1996.
[10] Chanda, Bhabatosh, Malay K. Kundu and Y.
Vani Padmaja, “A Multi_Scale Morphologic Edge Detector,” Pattern Recognition, Vol. 31, No. 10, pp 1469-1478, 1998.
[11] Maeda, J., T. Iizawa, T. Ishizaka and C. Ishikawa,
“Segmentation of Natural Images Using Anisotropic Diffusion and Linking of Boundary Edges,”Pattern Recognition, Vol. 31, No. 12, pp.
1993-1999, 1998.
[12] Siuzdak, J., “A Single Filter for Edge Detection,”Pattern Recognition, Vol. 31, No. 11, pp. 1681-1686, 1998.
[13] Kersten, Paul R., “Fuzzy Order Statistics and Their Application to Fuzzy Clustering,” IEEE Transactions on Fuzzy System, Vol. 7, No. 6, pp.
708-712, December 1999.
[14] Luo, Z. and C. H. Wu, “A Unit Decomposition Technique Using Fuzzy Logic for Real-Time Handwritten Chinese Character Recognition,”
IEEE Transactions on Industrial Electronics, Vol. 44, No. 6, December 1997.
[15] Udupa, Jayaram K. and S. Samarasekera, “Fuzzy Connectedness and Object Definition: Theory, Algorithms, and Applications in Image Segmentation,” Graphical Models and Image processing, Vol. 58, No. 3, pp. 246-261, May 1996.