行政院國家科學委員會專題研究計畫 成果報告
數位訊號處理器於穿透多層介質即時辨識系統之應用
計畫類別: 個別型計畫
計畫編號: NSC93-2623-7-011-001-
執行期間: 93 年 01 月 01 日至 93 年 12 月 31 日 執行單位: 國立臺灣科技大學高分子工程系
計畫主持人: 邱士軒
計畫參與人員: 黃衡宇、彭勝宏、蔡承陳、林國宏、翁伯凱、石傑方
報告類型: 完整報告
處理方式: 本計畫涉及專利或其他智慧財產權,1 年後可公開查詢
中 華 民 國 94 年 3 月 2 日
摘要
本 計 劃 針 對 多 層 介 質 即 時 辨 識 系 統 , 應 用 一 監 督 式 學 習 (supervised learning) - 最小距離分類器(Minimum Distance Classifier, MDC)對加速儀訊號進行特徵識別,相較於先前研究以 7 個特徵數與 倒傳遞類神經網路(Back-Propagation Neural Network, BP)的方式,使 用較少的特徵數及較短的辨識時間,卻有更高的辨識正確率。此外,
建立以數位訊號處理器(Digital Signal Processor, DSP)為核心之多層 介質即時辨識模組,以取代 PC based 的架構,並提昇系統的強健性。
本計畫之工作根據與中山科學研究院採購合同分為下列三大項:
壹、穿透多層介質即時辨識系統之理論建立。
a. 多層介質即時辨識系統之相關資料、發展現況及未來趨 勢研析。
b. 智慧型介質即時辨識器之建立理論,包含倒傳遞類神經 網路與最小距離分類器。
c. 特徵抽取之建立理論及分析。
貳、穿透多層介質即時辨識系統之平台開發 a. 系統之加速儀資料。
b. 系統的介面卡資料。
c. 系統靭體。
參、穿透多層介質即時辨識系統之介面平台整合與結果比較 a. 辨識法則。
b. 特徵值實驗。
c. 系統多功能整合。
d. 即時辨識實驗。
關鍵詞:最小距離分類器;特徵識別;數位訊號處理器
Abstract
In this project, we propose an identifying system of multi-layer mediums which use supervise learning - Minimum distance classifier to recognize the features of accelerometer signal. Beside, we apply digital signal processor (DSP) to replace the personal computer and make the system more robust.
Executing this project that be an agreement with Chung-Shan Institute of Science and Technology, including three terms as below.
1. Creating the theory of real-time recognition system of multi-layer mediums penetration.
a. The data of real-time recognition system of multi-layer mediums penetration and the analyses nowadays and future.
b. Creating the theory of Intelligent classifier in real-time, including Back-Propagation Neural Network and Minimum Distance Classifier.
c. Theory created and analyzed in extracting features.
2. Platform Developed in real-time recognition system of multi-layer mediums penetration.
a. The data of accelerometer in real-time recognition system of multi-layer mediums penetration.
b. The data of interface in real-time recognition system of multi-layer mediums penetration.
c. The firmware of real-time recognition system of multi-layer mediums penetration.
3. Integrating the interface of platform and results compared in real-time recognition system of multi-layer mediums penetration.
a. The rules of classifying.
b. The experience of features.
c. Multi-function integrated in real-time recognition system of multi-layer mediums penetration.
d. The experience of classifying in real-time.
Keyword:Minimum Distance Classifier; Feature Recognize; Digital
Signal Processor.
致謝
本研究計畫能如期的完成,感謝台灣科技大學 邱士軒教授,及
蘭陽技術學院 黃衡宇博士、彭勝宏博士不吝提供研究方向,特別感
謝中山科學研究院的 李進興、謝長泉、胡宏政、王家聖先生及辛苦
架設穿透平台的工程人員在研究期間給予莫大幫助;同時感謝國科會
資助經費讓此國防科技研究計劃得以順利進行,在此一併致謝。
目錄
摘要... I
Abstract ...III
致謝... VI
目錄... VII
圖表索引...X
一、 穿透多層介質即時辨識系統之理論建立...1
1.1 多層介質即時辨識系統之相關技術、發展現況與未來趨 勢研析 ...1
1.2 智慧型介質即時辨識系統之流程 ...5
1.3 倒傳遞類神經網路 ...6
1.3.1 特徵抽取 ...6
1.3.2 倒傳遞類神經網路 ...9
1.4 最小距離分類器 ...16
1.4.1 特徵抽取 ...21
二、穿透多層介質即時辨識系統之平台開發 ...23
2.1 穿透多層介質即時辨識系統之硬體架構...23
2.2 加速儀 ...24
2.3 DSP晶片...26
2.3.1 類比訊號轉換 ...27
2.3.2 中斷模組介紹 ...30
2.3.3 模擬板簡介 ...32
2.3.4 系統韌體 ...34
2.4 實驗硬體設備 ...36
三、 穿透多層介質即時辨識系統之操控執行及結果比較 ...39
3.1 以倒傳遞類神經網路為辨識器 ...39
3.1.1 特徵值實驗 ...41
3.1.2 倒傳遞類神經之即時辨識結果 ...46
3.2 以最小距離分類器為辨識器 ...48
3.2.1 特徵值實驗 ...48
3.2.2 辨識法則 ...51
3.2.3 最小距離分類器之即時辨識結果 ...56
3.3 大型穿透平台之即時辨識實驗 ...61
3.4 優缺點比較 ...72
四、計劃成果自評...73
4.1 成果 ...73
4.2 未來展望 ...73
參考文獻...75
附件... 79
圖表索引
圖 1 IF…THEN…規則分類法[2] ...2
圖 2 DSP示意圖[13] ...3
圖 3 辨識系統流程圖 ...5
圖 4 倒傳遞類神經網路架構圖 ...10
圖 5 倒傳遞類神經網路訓練流程圖 ...15
圖 6 最小距離示意圖 ...18
圖 7 決策邊界示意圖 ...19
圖 8 系統架構圖...23
圖 9 SEIKA B2 Accelerometer...24
圖 10 F2812 eZdsp模擬板 ...24
圖 11 ADC模組功能圖 ...27
圖 12 F2812 eZdsp基本架構方塊圖 ...32
圖 13 軟體發展流程圖 ...35
圖 14 穿透器內部示意圖 ...36
圖 15 穿透平台...37
圖 16 穿透器實體 ...38
圖 17 加速度與時間關係圖 ...41
圖 18 F1 特徵值與時間關係圖 ...42
圖 19 F2 特徵值與時間關係圖 ...42
圖 20 F3 特徵值與時間關係圖 ...43
圖 21 F4 特徵值與時間關係圖 ...43
圖 22 F5 特徵值與時間關係圖 ...44
圖 23 F6 特徵值與時間關係圖 ...44
圖 24 F7 特徵值與時間關係圖 ...45
圖 25 加速度與時間關係圖 ...47
圖 26 即時辨識結果 ...47
圖 27 加速度與時間關係圖 ...48
圖 28 T1 特徵值與時間關係圖 ...49
圖 29 T2 特徵值與時間關係圖 ...49
圖 30 T3 特徵值與時間關係圖 ...50
圖 31 T4 特徵值與時間關係圖 ...50
圖 32 加速度與時間關係圖 ...51
圖 33 T1 與T2 特徵分布圖 ...52
圖 34 加速度與時間關係圖 ...56
圖 35 使用T1 及T2 特徵之即時辨識結果...57
圖 36 使用T1~T4 特徵之即時辨識結果...57
圖 37 加速度與時間關係圖 ...58
圖 38 使用T1 及T2 特徵之即時辨識結果...59
圖 39 使用T1~T4 特徵之即時辨識結果...59
圖 40 大型穿透平台 ...61
圖 41 第 1 次實驗加速度與時間關係圖 ...63
圖 42 第 1 次實驗即時辨識結果 ...63
圖 43 第 1 次實驗速度與時間關係圖 ...64
圖 44 第 1 次實驗穿透深度與時間關係圖 ...64
圖 45 第 2 次實驗加速度與時間關係圖 ...65
圖 46 第 2 次實驗即時辨識結果 ...65
圖 47 第 2 次實驗速度與時間關係圖 ...66
圖 48 第 2 次實驗穿透深度時間關係圖 ...66
圖 49 第 3 次實驗加速度與時間關係圖 ...67
圖 50 第 3 次實驗即時辨識結果 ...67
圖 51 第 3 次實驗速度與時間關係圖 ...68
圖 52 第 3 次實驗穿透深度時間關係圖 ...68
圖 53 第 4 次實驗加速度與時間關係圖 ...69
圖 54 第 4 次實驗即時辨識結果 ...69
圖 55 第 4 次實驗速度與時間關係圖 ...70
圖 56 第 4 次實驗穿透深度時間關係圖 ...70
表 1 SEIKA B2 Accelerometer規格表...25
表 2 F2812 eZdsp模擬板規格表 ...25
表 3 TMS320F2812 晶片規格表...26
表 4 穿透平台參數表 ...37
表 5 誤判率最少的特徵組合 ...54
表 6 10 次實驗穿透時狀態辨識率 ...60
表 7 大型穿透平台參數 ...62
表 8 4 次實驗穿透時狀態辨識率 ...71
表 9 BP與MDC的比較 ...72
一、 穿透多層介質即時辨識系統之理論建立
1.1 多層介質即時辨識系統之相關技術、發展現況與未 來趨勢研析
現今軍事上許多重要的據點皆為掩體,也就是說這些據點皆有表 層的保護,而傳統的引爆方式通常都是當飛彈撞擊介質的一瞬間引 爆,此種方式在地表上引爆,破壞力無法有效的穿過表面層以破壞在 地底下的目標[1]。因而促進掩體穿透飛彈的發展,例如:GBU-15、
GBU-24、GBU-27、GBU-28、GBU-37 及 AGM-130 等,這些掩體穿 透飛彈使用先進之〝智慧型攻堅引信〞( Hard Target Smart Fuse, HTSF)。此類穿透器以靈敏的加速儀為感測器置於彈頭內,當彈頭 於穿透過程及撞擊目標時,產生的加速度訊號,利用訊號處理裝置與 電腦,對所獲得的訊號進行運算與分析,再經由一定的法則做辨識以 決定在適當時機點引爆。
〝智慧型攻堅引信〞的研究如下:U.S. Patent 5255608 對加速儀
訊號抽取數個不同的特徵,這些特徵包含加速儀訊號振幅大小、由訊
號大小衍生的平均與差異值及訊號突然變化的大小[2]。這些特徵經 由類似專家系統(Expert Systems)中複雜的 IF…THEN…邏輯,將穿透 訊號分類,如圖 1 所示[3,4]。先前研究透過訊號線連接穿透器中的 加速儀,傳輸穿透器穿透過程之訊號並利用 PC based 抽取訊號特徵 [5-9],再應用倒傳遞神經網路識別訊號特徵之狀態[10,11]。但是,PC based 的體積過於龐大無法應用於實際的穿透環境下,所以提出利用 模組化的數位訊號處理器,發展為智慧型穿透即時辨識系統的核心。
圖 1 IF…THEN…規則分類法
ㄧ般數位訊號的處理是經由 DSP 加以運算,如圖 2 所示。DSP 具有運算速度快、大儲存空間的高速定址能力、功能強大又靈活的指 令系統及體積小等特點,且具有靈活的介面與通訊能力,便於組織多 處理器平行運算、管線(pipeline)作業以及資源共用等,使處理速度與 精確度進一步得到提高。
A/D轉換器 DSP
記憶體
D/A轉換器
類比訊號 類比訊號
數位訊號 數位訊號
圖 2 DSP 示意圖[13]
先前於穿透器穿透時,使用倒傳遞類神經網路及 7 種特徵對加速 儀的訊號加以辨識,由於其運算複雜度高,所以需花較多的時間辨 識。且其辨識時是在 PC based 下執行,與〝智慧型攻堅引信〞實際 穿透環境有相當的差距[5]。
因此,本計劃於辨識方法中對穿透器穿透介質時的訊號抽取 4 種
特徵,並應用監督式學習- 最小距離分類器決定特徵中類別與類別之
間的決策邊界(decision boundary)[12-14]。最後以最小距離分類器及 4
種特徵與倒傳遞類神經網路的分類方法及 7 種特徵,比較何種方法能
有較短的辨識時間及較高的辨識率。且因 DSP 模組的體積小及易縮
裝於穿透器內以模擬實際的穿透環境,所以提出利用數位訊號處理器
代替個人電腦,發展一套即時辨識模組。比較兩種方法個別使用的特
徵抽取方式,實際利用數位訊號處理器做穿透實驗,並比較結果。期
望能透過經驗的傳承,讓本系統經過不斷的改善與精進後,使智慧型
即時辨識系統能更具強建性。
1.2 智慧型介質即時辨識系統之流程
針對即時辨識系統,本計劃提出設計理念與特徵類別的邏輯判 斷,並將此辨識器整合到數位訊號處理器中,對加速儀訊號經由特徵 抽取,將抽取到之特徵由分類器得到辨識結果,如圖 3 所示。
輸入訊號
特徵抽取
分類器
辨識結果
圖 3 辨識系統流程圖
1.3 倒傳遞類神經網路
1.3.1 特徵抽取
先前研究[5]使用之特徵抽取的方式,是針對加速儀所產生的訊 號,依加速度量、加速度改變量以及加速度累積量等概念設計 1 到 7 種特徵,同時應用視窗的概念以減低雜訊之影響。使用之特徵值詳細 說明如後:
特徵值 F1~F7 分別代表視窗之特徵值 1~特徵值 7。
定義如下:
1 0
[ ] (
ws| [ ] |) /
j
W i − S ws i j ws
=
= ∑ × +
i= 0,1, , / L
N ws(1)
[ ]
W i
:第 i 個視窗的加速度
[ ]
jS
:第 j 個數據點之加速度
ws
:視窗大小(window size)
特徵 1:4 個視窗之平均加速度
[ ]
3 0
1[ ] ( ) / 4
j
F i W i j
=
=
∑
−i
= 3, 4, , / L
N ws(2)
特徵 2:2 個視窗之平均加速度
[ ]
1 0
2[ ] ( ) / 2
j
F i W i j
=
=
∑
−i
= 1, 2, , / L
N ws(3)
特徵 3:連續資料點之差異
令
A[i]表示
S[ ]
j第一階導數之平均值:
[ ] [ ] }
1
{
1
[ ] (ws 1 ) /
j
A i − S ws i j S ws i j
=
=
∑
× + − × + − wsws
(4)
i
= 0,1, , / L
N[ ]
3 0
3[ ] ( ) / 4
j
F i A i j
=
= ∑ −
i= 3, 4, , / L
N ws(5)
特徵 4:連續視窗間之差異
[ ]
3 0
4[ ] [ ]
j
F i A i j A i j
=
=
∑
− − −i
= 4,5, , / L
N ws(6)
特徵 5:視窗訊號強度突然變化
3 0
5[ ] ( ( 1[ ] 1[ ])) / 4.0
j
F i F i j F i j
=
=
∑
− − −(7)
i
= 4,5, , / L
N ws特徵 6:視窗訊號的全距
F6[i]=Max(S[
ws i× +
j])-Min(S[
ws i× +
j]) (8)
i
= 0,1, , / L
N ws特徵 7:2 個視窗訊號的全距
1 0
7[ ] ( 6[ ]) / 2.0
j
F i F i j
=
=
∑
−i
= 1, 2, , / L
N ws(9)
1.3.2 倒傳遞類神經網路
倒傳遞類神經網路是一種具有學習能力的多層前授型網路,此種 神經網路,是由 Rumelhart 及 Mcclelland 兩位學者在 1985 年所提出 的。當初學者之所以會提出此種網路,是希望提出一種平行分佈訊息 的處理方法來探索人類認知之微結構。
倒傳遞類神經網路的運作流程,分為學習(Learning)與回想(Recall)
兩部份。其學習過程是一種監督式學習,從問題中取得訓練範例及目
標輸出值輸入至網路中,利用最陡坡降法 (The Gradient Steepest
Descent Method)反覆調節網路中層與層間的加權值及偏權值。回想過
程是將待測範例輸入至網路中,網路依學習完成後的加權值與偏權值
決定其輸出結果[15,16]。整個網路的基本架構與訓練流程如圖 4 與
圖 5 所示。
X
1X
2X
iW
ihW
hjY
1Y
2Y
jH
1H
hH
2隱藏層 輸出層
輸入層
圖 4 倒傳遞類神經網路架構圖
先前研究中所使用的倒傳遞類神經網路訓練步驟與相關參數如 下:
研究中採用 7 個輸入節點、3 個輸出節點與 5 個隱藏層節點的倒
傳遞類神經網路解決穿透訊號分類的問題。隱藏層神經元數目使用式
(10)之參考公式。
2 )
( + ÷
=
輸出節點個數 輸入節點個數
隱藏層神經元數
(10)
倒傳遞類神經網路整體運算流程共包含 8 個步驟,以下將詳細介 紹。
步驟一:設定轉換函數與網路參數值(學習速率
η、慣性因數 α )。
步驟二:以均佈隨機亂數設定網路的初始加權值及初始偏權值。
步驟三:輸入訓練樣本
Xi及目標輸出值 。
Tj步驟四:網路首先分別計算
Hh為隱藏層第 h 個神經元的輸出,
以及 為輸出層第
Yjj 個神經元的推論輸出值。
隱藏層之輸出計算式如下:
( ) 1
Hh = f neth =1+e−neth
(11)
1
-
Ninp
h i ih
i
net X W θh
=
=
∑ (12)
輸出層之推論輸出值計算式如下:
( ) 1
Yj
=
f netj= 1 +
e−
netj(13)
1
-
Nhid
h hj j
j h
net H W
θ
=
=
∑ (14)
:輸入層第 i 個神經元的輸出值
Xi
:隱藏層第 h 個神經元的加權乘積和
nethnet j
:輸出層第 j 個神經元的加權乘積和
:隱藏層及輸出層的轉換函數
f:輸入層第 i 個神經元與隱藏層第 h 個神經元間的加
Wih
權值(Weight)函數
:隱藏層第 h 個神經元與輸出層第 j 個神經元間的加
Whj權值(Weight)函數
θ
h:隱藏層第 h 個神經元的偏權值
θj:輸出層第 j 個神經元的偏權值
:輸入神經元數目
Ninp:隱藏層神經元數目
Nhid
步驟五:計算輸出層與隱藏層的差距量。
) ( ) 1
(
j j jj
j
=
Y× −
Y×
T−
Yδ
(15)
(16)
∑
=×
−
×
= Nout
j j hj h
h
h H H W
1
) 1
(
δ
δ
δj
:輸出層第 j 個神經元的差距量
δ
h:隱藏層第 h 個神經元的差距量
:第 j 個神經元的目標輸出值
Tj步驟六:計算各層間的加權值及偏權值修正量。
hj h
j
hj H W
W
= + × ∆
∆
ηδ α(17)
j j
j ηδ α θ
θ
= − + × ∆
∆ (18)
ih i
h
ih X W
W
= + × ∆
∆
ηδ α(19)
h
h
h ηδ α θ
θ
= − + × ∆
∆ (20)
:隱藏層第 h 個神經元與輸出層第 j 個神經元 間的加權值修正量
Whj
∆
θj
∆ :輸出層第 j 個神經元的偏權值修正量
Wih
∆
:輸入層第 i 個神經元與隱藏層第 h 個神經元 的加權值修正量
θ
h∆
:隱藏層第 h 個神經元的偏權值修正量
步驟七:更新各層間的加權值及偏權值。
(21)
hj hj
hj W W
W
= + ∆
j j
j θ θ
θ
= + ∆ (22)
(23)
ih ih
ih W W
W = +∆
h h
h
θ θ
θ
= +∆(24)
步驟八:重複步驟三至步驟七,直至網路收斂。
網路學習的目的是為了調整連接加權值,使網路的誤差函數達到 最小,一般利用式(25)誤差函數(或稱能量函數)調整學習品質。
∑
=⎟ −
⎠
⎜ ⎞
⎝
= ⎛
Ncyclej
j
j Y
T E
1
) 2 (
1 (25)
Ncycle
:學習循環次數
Tj
:第 j 個神經元的目標輸出值
Yj
:輸出層第 j 個神經元的推論輸出值
以 隨 機 亂數 給 予 網路 之 初始加權值及初始閥值
初始化網路
輸入訓 練 樣 本 及目標輸出值
計 算 網路 推 論 輸出值
計算輸出層與隱 藏層之差距量
計算各層間權值 及閥值之修正量
更 新各層間之 加權值與閥值
網 路是 否 收 斂 是 結束網 路 學 習 否
圖 5 倒傳遞類神經網路訓練流程圖
1.4 最小距離分類器
決 策 理 論 辨 識 方 法 的 基 礎 是 使 用 決 策 (decision) 或 鑑 別 (discriminant)函數[22]。設x=(x
1, x
2,…, x
n)
T表示一個n維特徵向量。對 於W個特徵類別ω
1,ω
2, ‧‧‧ω
W,決策理論特徵辨識的基本問題是尋找 W個決策函數d
1(x), d
2(x), …, d
W(x),使其具有如下性質;如果一個特 徵x屬於ω
i類,則:
( ) ( )
i j
d x
>
d xj
=1, 2, L , ;
W j i≠ (26)
換句話說,對於一個未知特徵x,將它帶入所有決策函數,如果 d
i(x)得出最大值,則x就屬於第i類特徵;若平手,則任選其一。分離 ω
i類和ω
j類的決策邊界(decision boundary),是由滿足d
i(x)=d
j(x)值所 給,或者等效來說,是由滿足下式的x值所給:
( ) ( ) 0
i j
d x
−
d x= (27)
慣用的做法是用單個函數d
ij(x)=d
i(x)−d
j(x)=0 來決定兩類之間
的決策邊界,且max{d
i(x)}。於是,對於ω
i類的特徵,d
ij(x)>0;對於
ω
j類特徵, d
ij(x)<0。假設我門定義每個特徵類別的原形向量為該特徵
類別的平均向量:
1
j
j j
j x
N ∈ω
= ∑
m x
j
=1, 2, L ,
W(28)
其中N
j是來自ω
j類別的特徵數,而總和是對所有這些向量進行 的。同前,W是特徵類別的總數。決定一個未知特徵向量x所屬類別 的一個方法是把它指定給最靠近原型向量的類別。利用歐幾里得距離 決定靠近程度,可以把問題簡化為計算距離測量:
( ) || ||
j j
D x
=
x m−
j=1, 2, L ,
W(29)
其中||a||=(a
Ta)1/2是歐幾里得範數(norm)。此時,如果D
i(x)是最小 距離,我們就把x指定給ω
i類。也就是說,最小距離意味著最好的匹 配。x
1與x
2特徵的分佈可分為ω
1與ω
2類別,分別求出ω
1的平均m
1與ω
2的平均m
2。若有一未知的特徵x(x
1, x
2),並算出x(x
1, x
2)到m
1的距離與
x(x1, x
2)到m
2的距離,可知x(x
1, x
2)到m
1的距離為最短,因此x(x
1, x
2)屬
於ω
1類別,如下圖 6 所示。
圖 6 最小距離示意圖 A
m
1m
2ω
1ω
2x
2x
1選擇最小距離和計算下面的函數是等效的:
( ) 1
2
T T
j j j
d x
=
x m−
m mjj
=1, 2, L ,
W(30)
如果d
i(x)得出最大值,則將x指定為ω
i類。這個公式和決策函數 的概念是一致的,如(26)式所示。由(27)式和(30)式,對於最小距離分 類器來說,ω
i類和ω
j類之間的決策邊界是
( ) ( ) ( ) ( ) 1 ( ) ( ) 0
2
T T
ij i j i j i j i j
d x
=
d x−
d x=
x m−
m−
m−
m m−
m= (31)
(31)式得出的面是連接m
i和m
j的直線段的垂直平分。n=2 時,垂 直平分是一條線,n=3 時,垂直平分是一個平面,n>3 時,是一個所 謂的超平面(hypefplane)。x
1與x
2特徵的分佈可分為ω
1與ω
2類別,分別 求出ω
1的平均m
1與ω
2的平均m
2,由式(31)可得到ω
1與ω
2的決策邊界 d
12(x)=0。將一未知的特徵x(x
1, x
2)帶入決策邊界d
12(x)中,若d
12(x)>0 則x(x
1, x
2)屬於ω
1類別,若d
12(x)<0 則x(x
1, x
2)屬於ω
2類別,如下圖 7 所示。。
圖 7 決策邊界示意圖 m
1m
2ω
1ω
2d
12(x)<0 d
12(x)=0
d
12(x)>0
x
2x
1實際上,當平均向量之間的距離比每一類的平均向量的擴展或隨
機性範圍還要大時,最小距離分類器的工作情況是很好的。當每一種
類別相對於平均向量的分佈在 n 維特徵空間中是ㄧ個球狀形式時,最
小距離分類器得出最佳性能(即錯誤分類平均損失最小 )。
1.4.1 特徵抽取
本計劃所使用的特徵抽取方法,對加速儀所產生的訊號,依加速 度量、加速度改變量以及加速度累積量設計 4 種特徵,經由最小距離 分類器分類後可得知辨識結果。
特徵值 T1~T4 分別代表視窗之特徵值 1~特徵值 4。
定義如下:
1 0
[ ] (
ws| [ ] |) /
j
W i − S ws i j ws
=
= ∑ × +
i= 0,1, , / L
N ws(32) [ ]
W i
:第 i 個視窗的加速度
[ ]
jS
:第 j 個數據點之加速度
ws
ws
:視窗大小(window size)
特徵 1:2 個視窗之平均加速度
[ ]
1 0
1[ ] / 2
j
T i W i j
=
⎧ ⎫
=⎨ − ⎬
⎩
∑
⎭ i= 1, 2, , / L
N(33)
特徵 2:連續 2 視窗間差異
[ ] [ ]
2[ ] 1
T i =W i −W i−
i
= 1, 2, , / L
N ws(34)
特徵 3:相差 10 個視窗間差異
[ ] [ ]
3[ ] 11
T i =W i −W i−
i
= 11,12, , / L
N ws(35)
特徵 4:連續 2 個 T3 間差異
[ ] [ ]
4[ ] 3 11 3 12
T i
=
T i− −
T i−
i= 12,13, , / L
N ws(36)
二、穿透多層介質即時辨識系統之平台開發
2.1 穿透多層介質即時辨識系統之硬體架構
本系統以 DSP 為核心[17,18],負責訊號擷取、訊號處理及輸出 辨識結果,其架構如圖 8 所示。目的為執行加速儀訊號之擷取,並 透過類比至數位轉換(Analog to Digital Converter, ADC),將加速儀 訊號送入數位訊號處理器中執行進一步之處理與分析。而數位電路則 由具有 TMS320F2812 定點式數位訊號處理器之 F2812 eZdsp 數位訊 號處理模組為主體[22],並於該處理器上發展智慧型即時辨識系統,
此辨識系統包括特徵抽取、辨識器兩個部分。
Accelerometer A/D converter
TMS320F2812 DSP
FLASH
ROM SRAM
引信 DSP embedded system
GPIO
圖 8 系統架構圖
2.2 加速儀
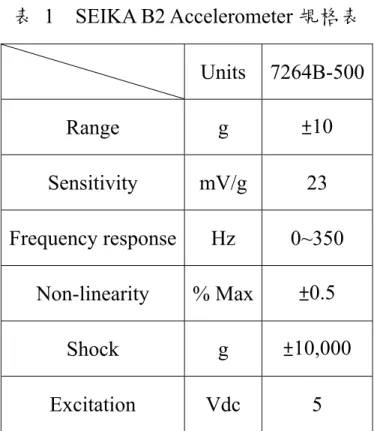
本計劃中所使用之加速儀(SEIKA B2 Accelero-meter)如圖 9 所 示,其功能是將加速度的變化轉換成電壓輸出,其規格如表 1 所示。
本計劃所使用之 F2812 eZdsp 模擬板如圖 10 所示,其規格如表 2 所 示。
圖 9 SEIKA B2 Accelerometer
圖 10 F2812 eZdsp 模擬板
表 1 SEIKA B2 Accelerometer 規格表 Units 7264B-500 Range g ±10
Sensitivity mV/g 23 Frequency response Hz 0~350
Non-linearity % Max ±0.5 Shock g ±10,000 Excitation Vdc 5
表 2 F2812 eZdsp 模擬板規格表 operating speed 150 MIPS
on-chip RAM 18K
on-chip Flash memory 128K words
off-chip SRAM memory 64K
2 Expansion Connectors Analog I/O
2.3 DSP 晶片
研究中使用之 DSP 晶片為德州儀器( T.I. )所生產,其晶片型號為 TMS320F2812,規格如表 3 所示。
表 3 TMS320F2812 晶片規格表 工作週期 (MHz) 150 內部程式記憶體 Flash (Words) 128K 內部資料記憶體 RAM(Words) 18K
外部記憶體介面 YES 12 位元 A/D 通道 16
計時器 Timers 3
晶片核心電壓(Volts) 1.8
輸入/輸出電壓(Volts) 3.3
2.3.1 類比訊號轉換
TMS320F2812 晶片內建有兩組可將類比信號轉換為數位信號,
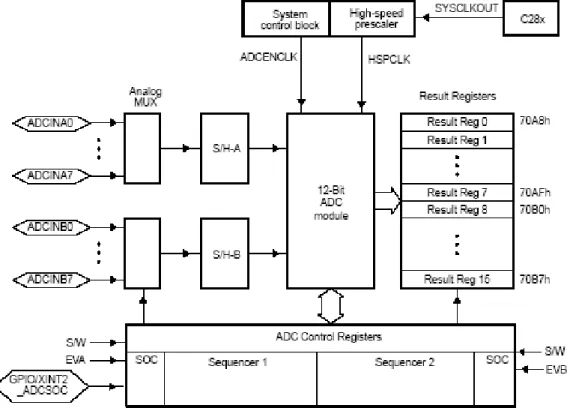
且轉換時間(Conversion time)僅需 200ns,解析度達到 12 位元的類比- 數位 (Analog-to-Digital)轉換器模組(ADC)[25]。這兩組 ADC 採用 string/capacitor 轉換設計方法,均有各自獨立的取樣-保持(Sample and hold)電路及 8 對 1 的類比輸入多工器,如圖 11 所示。
圖 11 ADC 模組功能圖
ADC 模組具有如下之功能:
1. TMS320F2812 晶片中有兩組 ADC 模組,故可同時量測兩個輸 入。
2. TMS320F2812 晶片中每一個 ADC 模組有 8 個類比輸入,總共 有 16 個類比輸入(ADCIN0~ADCIN15)。
3. 有單一轉換和連續轉換模式。
4. 軟體、內部事件或是外部事件都能夠致使 ADC 開始轉換。
5. VREFHI 與 VREFLO(高與低)電壓參考輸入。
6. 可程式時脈比率(prescaler)選擇。
7. 具中斷或輪詢模式操作。
此 12 位元 ADC 轉換的數位值,由下列近似方程式可得:
REFLO REFHI
REFLO
V V
V
−
× −
= 輸入類比電壓
數位值 4095
(37)
穿透器穿透過程中加速儀之類比電壓訊號經 DSP 晶片內建 ADC
轉換,再由 ADC 數位結果暫存器(ADC Data Register)來存放數位訊
號。
2.3.2 中斷模組介紹
為了增進程式執行效率,DSPF2812 提供中斷功能,可暫時性地 中斷主程式,去執行預定的副程式。DSPF2812 中斷來源,可以分成 二個部分來說明[19,20,23]:
1. 就軟體中斷源部份而言 DSPF2812 提供了中斷指令, 如 INTR,NMI 及 TRAP 等指令,讓使用者可以在程式規劃中,
很方便地達到中斷效果。
2. 硬體中斷源部份而言:DSPF2812 的硬體中斷源又可以分為 2 個部分。一個是由外部裝置所提出之中斷信號源。另一個則 是晶片內部周邊所反應之中斷信號源。這二種中斷源都可預 留由使用者自行規劃極性,和優先處理順序。
DSPF2812 的中斷控制可以分為可遮蔽式(Maskable)與不可遮蔽
式(Nonmaskable)二種,可遮蔽式中斷代表意思為:使用者可以使用
軟體指令來設定硬體所產生的中斷是會被 CPU 所接受(Unmasked)或
是拒絕(Masked)。不可遮蔽式中斷意思則代表:只要該中斷信號產生
了,CPU 就必須要接受及處理。
DSPF2812 對於接受到內部或外部中斷信號要求時,是以下列 3 個順序來進行處理:
1. 收到中斷要求:如果是軟體指令提出,則為程式碼(Program code)所產生,如為硬體提出,則為晶片上之腳位接受到信號,
或是晶片內部直接所提出。
2. 產生中斷認可:如果是屬於不可遮蔽式中斷之硬體中斷,或 軟體指令中斷,必需立刻認可。如果是屬於可遮蔽式中斷源,
DSPF2812 會在確認符合設定條件後,再發出認可。如果不符 合特定條件時,則不產生認可信號。
3. 執 行 中 斷 服 務 常 式 (Interrupt Service Routine-ISR) : 一 但
DSPF2812 認可了中斷,就會跳躍到指定的中斷向量位址去執
行中斷服務常式。
2.3.3 模擬板簡介
本計劃中使用的 F2812 eZdsp 板為 Spectrum Digital 公司所開發 的 F2812 晶片之模擬板,可評估與驗證 TMSF2812 數位訊號處理器 晶片之特性,以決定此晶片是否可符合應用產品規格之要求。因此,
eZdsp 模組乃針對 TMS320F2812 晶片之發展與軟體功能測試,所開 發之硬體平台。F2812 eZdsp 基本架構主要包括有外部程式與資料記 憶體、JTAG 通訊介面與 IO 擴充介面,如圖 12 所示。
圖 12 F2812 eZdsp 基本架構方塊圖
F2812 eZdsp 也提供精簡程式碼發展、縮短除錯時間之組合語言
和視窗除錯器。此外,板上也具有 JTAG 通訊連接埠,可提供模擬介
面以作為與其他組合語言或 C 語言除錯器間之操作[21]。
2.3.4 系統韌體
DSP 模組之系統韌體程式開發是使用 TI 所提供的整合式程式發 展環境,稱為 CCS(Code Composer Studio),其具有人性化介面及模擬 的功能等,程式語言撰寫可分為組合語言與 C/C++。研究中所使用為 C/C++,可方便程式的開發及從 PC based 上移植到 DSP 晶片上,且 易增加程式的閱讀性[24]。
CCS 開發軟體中的組譯器可接受專案中 C 語言經由 C 組譯器編
譯成的組合語言或純組合語言的原始檔及巨集函式庫以產生 COFF
的.obj 檔,最後經連結器及結合函式庫、資料庫等來產生可執行之
COFF 檔(.out),此 COFF 檔(.out)可下載至模擬板以進行除錯功能,如
圖 13 所示。
巨集原始程式
檔案管理器
巨集資料庫
組譯器 組合語言原始
程式
C編譯器 C語言程式
COFF目的檔 檔案管理器
目的檔案資料
庫 連結器
COFF執行檔 HEX轉換器
EPROM燒錄 DSPF2812
除錯工具 專案Project
圖 13 軟體發展流程圖
2.4 實驗硬體設備
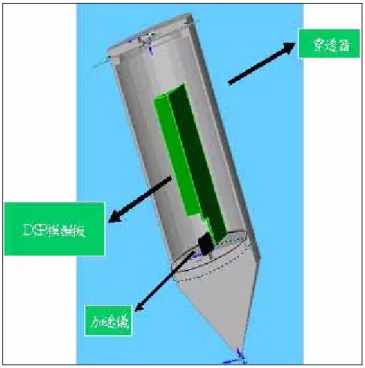
將 DSP 置於穿透器內,如圖 14 所示。建立一穿透平台作為穿透 器導引,如圖 15、圖 16 及表 4 所示。為了執行加速儀訊號之擷取,
並透過類比至數位轉換(Analog to Digital Converter, ADC),將加速 儀訊號送入數位訊號處理器中執行處理與分析。該處理器上的智慧型 即時辨識系統,包含特徵抽取與辨識器兩個部分。
圖 14 穿透器內部示意圖
表 4 穿透平台參數表 項
目 名稱 內容 備註
1 穿透器長度 30 cm 2 測試平台高度 200 cm 3 軌道長度 65 cm 4 穿透器釋放時至介質
距離 100 cm 5 介質間隔 50 cm
6 穿透器速度 5 m/s 穿透器由釋放至第一個介質
圖 15 穿透平台
圖 16 穿透器實體
三、 穿透多層介質即時辨識系統之操控執行及 結果比較
本計劃之實驗,乃使用 F2812 eZdsp 模擬板和加速儀裝置縮裝在 穿透器中,透過加速儀產生的訊號經 DSP 晶片來完成即時多層目標 的辨識。
3.1 以倒傳遞類神經網路為辨識器
甲、訓綀:
利用縮裝在穿透器中的 F2812 eZdsp 模擬板之外部 SRAM 儲存當 穿透器穿透介質時加速儀所產生的變化值,此變化值為加速儀所產生 的類比電壓經 DSP 晶片中的 ADC 模組轉換為數位值。此時數位值介 於 0~4095 之間,再經過正規化的公式(38)將其轉換成 0~1 之間。完 成穿透後將存放在模擬板上之外部 SRAM 中的加速度值透過並列埠 傳至 PC based 中,將此變化值利用特徵抽取程式取出 7 種特徵,經 倒傳遞類神經網路訓練出所需的網路加權值及偏權值。
正規化公式:
min
max min
new old
V V
V V V
⎡ −
= ⎢⎣ − ⎦
⎤⎥
(38)
V
min、 V
max:分別為資料序列中各輸入參數之極大極小值。
V
old、 V
new:分別為轉換前轉換後之資料序列值。
乙、辨識:
將訓練好之網路加權值及偏權值,存入 F2812 eZdsp 模擬板
上之 DSP 晶片,透過倒傳遞類神經網路的回想辨識出穿透時的
狀態。
3.1.1 特徵值實驗
在此依照 1.3.1 節描述的方法,對 15 組實驗抽取特徵。在 PC based 上將 15 組實驗,利用倒傳遞類神經網路訓練出所需的網路加權值、
偏權值及回想程式,燒入 DSP 晶片的 Flash memory 中使 F2812 eZdsp 模擬板能獨立運作,進行即時穿透辨識。此實驗使用中斷方式擷取加 速儀電壓,取樣時間 10µs、視窗大小 200 個資料點且 500 個視窗,
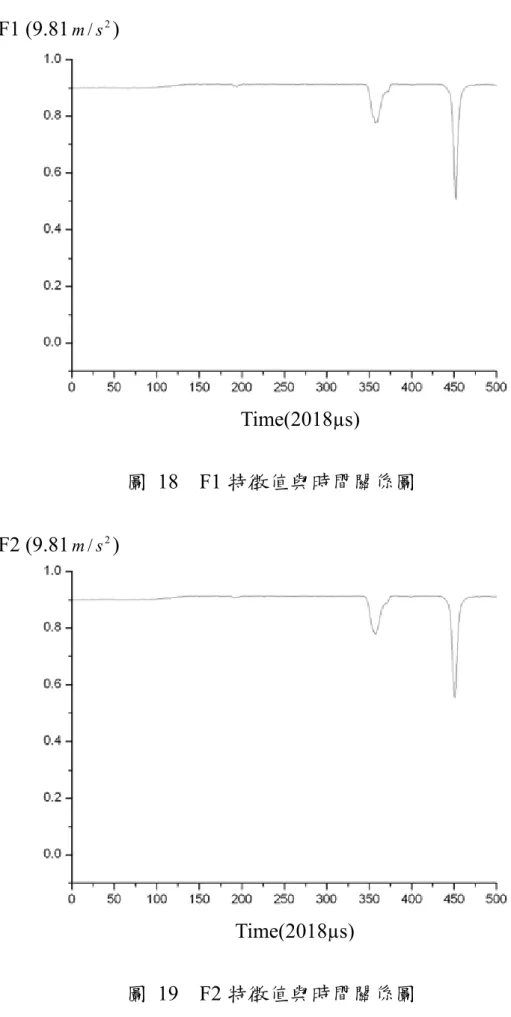
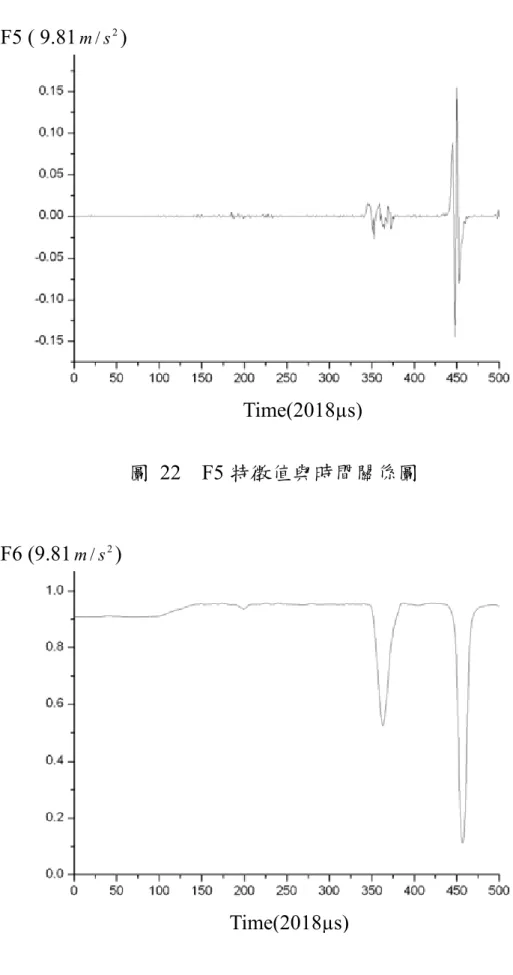
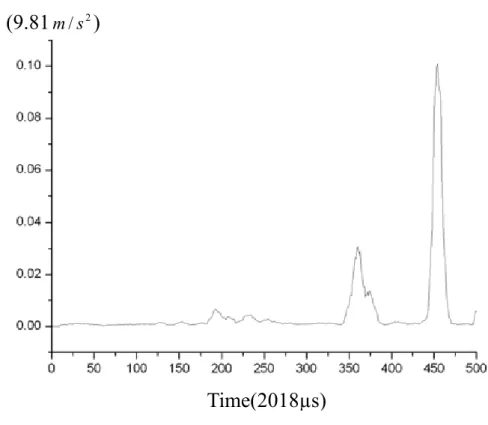
執行 F1~F7 特徵需 18µs。穿透過程依序為靜止、空氣、介質、空氣 及觸底,如圖 17 所示。圖 18~圖 24 為特徵 F1~特徵 F7 與時間之關 係圖。
圖 17 加速度與時間關係圖 g (Approx. 9.81
m/ s
2)
Time(2018µs)
圖 18 F1 特徵值與時間關係圖
圖 19 F2 特徵值與時間關係圖 F1 (9.81
m/ s
2)
Time(2018µs)
F2 (9.81
m/ s
2)
Time(2018µs)
圖 20 F3 特徵值與時間關係圖
圖 21 F4 特徵值與時間關係圖 F3 (9.81
m/ s
2)
Time(2018µs)
F4 (9.81
m/ s
2)
Time(2018µs)
圖 22 F5 特徵值與時間關係圖
圖 23 F6 特徵值與時間關係圖 F5 ( 9.81
m/ s
2)
Time(2018µs)
F6 (9.81
m/ s
2)
Time(2018µs)
圖 24 F7 特徵值與時間關係圖 F7 (9.81
m/ s
2)
Time(2018µs)
3.1.2 倒傳遞類神經之即時辨識結果
辨識率定義為穿透時的狀態辨識成功率;若分析特徵時,則為狀 態辨識率;若穿透介質時,則為介質辨識率。穿透器由靜止開始釋放,
行經軌道後穿透介質最後觸底,取樣時間 10µs、視窗大小 200、共 350 個視窗,辯識時間 300µs(包含特徵抽取與執行倒傳遞類神經網路 回想的時間),如圖 25 所示。可利用式(39)計算穿透時狀態辨識率為 95%,如圖 26 所示。
(39)
NE N A
= ( − ) /
N:觸底結束前數據總數
E:觸底結束前判斷錯誤總數
A:辨識率
圖 25 加速度與時間關係圖
圖 26 即時辨識結果 g (Approx. 9.81
m/ s
2)
Time(2.3ms)
Time(2.3ms)
3.2 以最小距離分類器為辨識器
3.2.1 特徵值實驗
在此依照 1.4.1 節描述的方法,對 17 組實驗抽取特徵,再將這些 特徵經由最小距離分類器,得到各類別的決策邊界。此實驗使用中斷 方式擷取加速儀電壓,取樣時間 5µs、視窗大小 50、共 3000 個視窗,
T1~T4 計算時間 3µs。穿透過程依序為靜止、空氣、介質、空氣及觸 底,如圖 27 所示。圖 28~圖 31 為特徵 T1~特徵 T4 與時間之關係圖。
圖 27 加速度與時間關係圖 g (Approx. 9.81
m/ s
2)
Time(253µs)
圖 28 T1 特徵值與時間關係圖
圖 29 T2 特徵值與時間關係圖 T1 (9.81
m/ s
2)
Time(253µs)
T2 (9.81
m/ s
2)
Time(253µs)
圖 30 T3 特徵值與時間關係圖
圖 31 T4 特徵值與時間關係圖 T3 (9.81
m/ s
2)
Time(253µs)
T4 (9.81
m/ s
2)
Time(253µs)
3.2.2 辨識法則
對穿透訊號做以下分類,如下圖 32 所示,圈選為 0 的區域辨識 為靜止、圈選為 1 區域辨識為空氣及圈選為 2 的區域辨識為介質。
圖 32 加速度與時間關係圖 g (Approx. 9.81
m/ s
2)
B
1
0 1
2
C
2
Time(253µs)
由 1.4.1 節所描述對 17 次的穿透實驗抽取特徵。藉由 T1 與 T2 特徵說明決策邊界,若使用 4 種特徵以上即為超平面,無法以任何圖 形表示。利用 T1 為 2 個視窗之平均加速度及 T2 為 2 個視窗之差異量 找出各個圈選區域 0、1 與 2 的平均分佈,如圖 33 所示。
圖 33 T1 與 T2 特徵分布圖
d
12圖 33 中 , 靜 止 的 平 均 m
0=(0.0554,0.00027)
T、 空 氣 的 平 均
m1=(0.7276,0.0002)
T及介值的平均m
2=(-3.835,-0.00005)
T,經由式(31) 所述可得到d
01與d
12的決策邊界。如下所示:
01
0.672
10.0001
28.263 0
d
= −
T+
T− =
12
4.562
10.0002
2222.5 0
d
=
T+
T− =
因此,當d
01<0 時,就可決定出穿透時的狀況為空氣;d
01>0 且d
12>0 時,就可決定出當時的狀況為靜止;d
12<0 時,可決定出當時為穿透 介質。因此可對上述結果訂出以最小距離分類器為辨識器的法則。
分別使用 T1 與 T2、T1 與 T3、T1 與 T4 及 T1~T4 特徵組合,利 用上述方式找出其決策邊界,並對 17 次的穿透實驗辨識其中一組,
找出穿透時狀態誤判率最少的組合,用以決定之後實驗所要使用的特
徵組合。如表 5 所示,我們可決定使用 T1~T4 特徵組合的最小距離
分類器,有最少的穿透時狀態誤判率。
表 5 誤判率最少的特徵組合
項目 內容
誤判率 視窗個數(3000) 1 T1 及 T2 3.13%
2 T1 及 T3 3.43%
3 T1 及 T4 3.37%
4 T1~T4 2.67%
T1~T4 特徵的各類別平均為:
靜止的平均m
0=(0.0554, 0.00027, -0.00372, -0.0425)
T(40)
空氣的平均m
1=(0.7276, 0.0002, -0.0085, -0.103)
T(41)
介值的平均m
2=(-3.835, -0.00005, 0.0213, -0.49)
T(42)
將式(40)、(41)及(42)帶入式(31)可得各類別邊界:
01 1 2 3 4
12 1 2 3 4
=
0.672 0.0001 0.00478 0.0605 0
d
= −
T+
T+
T+
T= (43)
4.562 0.0002 0.03 0.388 0
d
=
T+
T−
T+
T(44)
因此,當d
01<0 時,就可決定出穿透時的狀況為空氣;d
01>0 且d
12>0
時,就可決定出當時的狀況為靜止;d
12<0 時,可決定出當時為穿透
介質。因此可對上述結果訂出以最小距離分類器為辨識器的法則。
3.2.3 最小距離分類器之即時辨識結果
在此依照 3.2.2 節描述的方法,設計最小距離分類器。並使用 3.1.2 節實驗中一樣的取樣時間 10µs、視窗大小 200、共 475 個視窗,辨識 時間 25µs(包含特徵抽取與執行決策邊界的時間)。穿透過程依序為靜 止、空氣、介質、空氣及觸底,如圖 34 所示。由實驗結果可知,使 用 T1 與 T2 特徵的穿透時狀態辨識率為 96%,如圖 35 所示;使用 T1~T4 特徵的穿透時狀態辨識率為 100%,如圖 36 所示。
圖 34 加速度與時間關係圖
g (Approx. 9.81
m/ s
2)
圖 35 使用 T1 及 T2 特徵之即時辨識結果
圖 36 使用 T1~T4 特徵之即時辨識結果
在此依照 3.2.2 節描述的方法,設計最小距離分類器。取樣時間 5µs、視窗大小 50、共 4200 個視窗,辨識時間 25µs(包含特徵抽取與 執行決策邊界的時間)。穿透過程依序為靜止、空氣、介質、空氣及 觸底,如圖 37 所示。由實驗結果可知使用 T1 與 T2 特徵的穿透時狀 態辨識率為 95%,如圖 38 所示;使用 T1~T4 特徵的穿透時狀態辨識 率為 100%,如圖 39 所示。
圖 37 加速度與時間關係圖 g (Approx. 9.81
m/ s
2)
Time(275µs)
圖 38 使用 T1 及 T2 特徵之即時辨識結果
圖 39 使用 T1~T4 特徵之即時辨識結果 Time(275µs)
0 = 靜止 1 = 空氣 2 = 介質