國立臺灣大學應用力學研究所 碩士論文
Institute of Applied Mechanics College of Engineering National Taiwan University
Master Thesis
低雷諾數下低展弦比翼板之起動流場實驗分析
Experimental Study on Flow around the Low-Aspect-Ratio Wing of Start-Up Motion at Low Reynolds Numbers
姚凱涵 Kai-Han Yao
指導教授:朱錦洲 博士 張建成 博士 Advisor: Chin-Chou Chu, Ph.D.
Chien-Cheng Chang, Ph.D.
中華民國 100 年 7 月
July, 2011
誌謝
本論文的完成,首先要感謝我的指導老師朱錦洲教授,對我懶散的個性加以 督導,並時時提醒實驗室要注意安全。感謝口試委員張建成教授、陳弘正教授、
謝政達博士、黃世霖博士對本論文提出指正及許多寶貴的意見。特別感謝黃世霖 學長與李健誌學長對本實驗的指導,在懵懵懂懂的地方提出寶貴的意見,對於實 驗的進行更著莫大的幫助。感謝同窗陳尹中、楊俊賢、蔡倆俠、鄭孙軒、張奕傑、
莊勝翔、黃百庭、李維懿在兩年求學生涯課業上的幫助,讓我學習到不少東西以 及感謝裕昇學長對於生活的指點。
感謝實驗室學弟朱峰正、石哲銘、吳運鵬、李孜亞、石俊偉、周建車為實驗 室帶來歡樂的氣氛,以及許多的八卦,讓我能在實驗室保更輕鬆的心情。
感謝我的家人在我疲憊的時候支持我,體會到”家是最溫暖的避風港”,讓我得 以休息走更長遠的路。
中文摘要
微飛行器更許多研究學者投入心力去研究,較更前瞻性的是模仿鳥類或昆蟲 的撲翼運動,因其具更很高的機動性。而微飛行器主要更兩個特點:(1)在低雷諾 數(Re 10 ~ 10 2 3)下運作;(2)低展弦比。在低雷諾數下,許多複雜的現象可能在邊 界層(Boundary Layer)發生,例如:流場分離 (Separation)、過渡流(Transition Flow)、
流體再附著(Reattachment);且低展弦比的情況下,翼尖渦的影響及其與前緣渦的 交互作用變得重要得多。為簡化問題,本實驗以低展弦比的平板作為研究對象,
使用流場顯影配合升、阻力量測,探討更限平板渦漩的發展以及前緣渦與翼尖渦 的結構。本實驗在甘油和水的混合溶液下以雷諾數 100、300 進行低展弦比翼板高 攻角瞬間起動且作平移運動,使用的平板展弦比更 1、2、3,攻角 15、30、45、
60 度,用六軸量力感測器記錄其升、阻力係數隨時間的變化,並分析無因次化時 間 T=2 與 T=7 升阻力係數的差異以及展弦比對升阻力係數的影響。流場觀測方面,
藉著釋放微塑膠顆粒,並使用雷射光切頁與 CCD 擷取圖像,在不同剖面觀察前緣 渦與翼尖渦隨時間的發展,配合 PIV 方法計算流場的速度場及渦度值。由量力結 果發現在翼板剛起動時更著較大的升阻力係數以及較高的升阻力係數比值,符合 延遲失速(Delayed Stall)效應;且在觀察前緣渦的發展中,發現在較低雷諾數與較 高的展弦比情況下,前緣渦聚集成巨大的渦漩;反之,前緣渦則容易受到翼尖渦 的影響,使前緣渦消散變成不規則的運動,甚至是滯流的狀態。在翼尖渦可自由 發展的情況下,本實驗並無發現馮卡門渦漩(Von Kármán Vortex)的產生。
關鍵字:低雷諾數、低展弦比、前緣渦、翼尖窩、更限翼
ABSTRACT
Micro air vehicles (MAV) is a popular research topic. Because of the high maneuverability, simulation of flapping wings of birds and insects may have good potential in the MAV development. Micro air vehicles operate in a relatively low Reynolds number regime. In this regime, many complex flow phenomena take place within the boundary layers: separation, transition, and reattachment can all occur within a short distance along the chord of a wing. Under the condition of low-aspect-ratio, the effect of wing-tip vortex and it’s interaction with leading-edge vortex become more important. To simplify the problem, low-aspect-ratio flat plates are used to investigate the formation of leading-edge vortex, wing-tip vortices by means of quantitative flow visualization. The experiment is performed in a tank filled with a Glycerine/water mixer.
The low-aspect-ratio rectangular plate is impulsively started and translated at high angles of attack at low Reynolds numbers(Re=100、300). The considered aspect-ratios are 1, 2 and 3, respectively. The angles of attack are 15, 30, 45 and 60 degrees. The plate is rigidly mounted to a six-axis force sensor recording lift and drag force with time.
The variations of lift and drag coefficients between nondimensional time T=2 and T=7, and the effect of aspect-ratio to lift and drag coefficients are analyzed. For flow visualization, small particles are released in the fluids illuminated by laser light sheet.
The trajectories of the particles are captured by CCD camera. The velocity and vorticity fields can be calculated by PIV method, through which, the formation of leading-edge vortex and wing-tip vortices can be observed. Results show that at the beginning of translation the plate has larger lift and drag coefficients and larger lift to drag ratios, which conform to the effect of delayed stall. In the observation, we find that under the
can be gathered to form a bigger vortex; otherwise, the leading-edge vortex will be influenced by the wing-tip vortices and dissipate to an irregular and slow motion. In the situation of free development of wing-tip, the Von Kármán Vortex was not observed in the present study.
Key words: low Reynolds number, low-aspect-ratio, leading-edge vortex, wing-tip vortex, finite plate, high angle of attack.
CONTENTS
口試委員會審定書 ... #
誌謝 ...i
中文摘要 ... ii
ABSTRACT ... iii
CONTENTS ... v
LIST OF FIGURES ... viii
LIST OF TABLES ... xiii
Chapter 1 Introduction ... 1
1.1 前言 ... 1
1.2 文獻回顧 ... 2
1.3 研究動機與目的 ... 3
Chapter 2 實驗設備與實驗方法 ... 5
2.1 實驗設備 ... 5
2.1.1 實驗水槽 ... 5
2.1.2 黏度計(Viscometer) ... 5
2.1.3 運動模擬系統 ... 6
2.1.4 受力量測系統 ... 6
2.1.4.1 防水型六軸力規感應器 ... 6
2.1.4.2 訊號擷取裝置 ... 7
2.1.5 流場量測系統 ... 7
2.1.5.2 電子耦合攝影機(Charge-Couple Device) ... 7
2.1.5.3 流場顯影粒子 ... 8
2.1.5.4 影像擷取卡及軟體 ... 8
2.2 實驗方法 ... 8
2.2.1 運動控制 ... 8
2.2.2 實驗步驟 ... 9
2.2.2.1 升阻力量測 ... 9
2.2.2.2 流場顯影 ... 9
2.2.3 實驗訊號分析 ... 10
2.2.3.1 量力訊號分析 ... 10
2.2.3.2 流場影像分析 ... 10
Chapter 3 理論分析Equation Chapter 3 Section 1 ... 12
3.1 動態比例 ... 12
3.1.1 展弦比(Aspect Ratio) ... 12
3.1.2 雷諾數(Reynolds Number) ... 12
3.1.3 無因次時間 ... 13
3.1.4 升力係數(CL) ... 13
3.1.5 阻力係數(CD) ... 14
3.2 基礎理論 ... 14
3.2.1 近穩態假設(The Quasi-Steady Assumption) ... 14
3.2.2 尾渦度(Wake Vorticity) ... 15
3.2.3 華格納效應(The Wagner Effect) ... 15
3.2.4 延遲失速效應(Delayed Stall)... 15
Chapter 4 實驗結果與討論 ... 17
4.1 實驗參數 ... 17
4.2 受力量測 ... 18
4.2.1 與數值結果比對 ... 18
4.2.2 升阻力係數 ... 19
4.2.3 極座標圖(Polar Plot) ... 20
4.2.4 升阻力係數比值與攻角 ... 21
4.2.5 升阻力係數與展弦比 ... 21
4.3 流場顯影 ... 22
4.3.1 前緣渦 ... 22
4.3.1.1 雷諾數 100 ... 22
4.3.1.2 雷諾數 300 ... 24
4.3.2 翼尖渦 ... 26
4.3.2.1 雷諾數 100 ... 26
4.3.2.2 雷諾數 300 ... 28
Chapter 5 結論與未來展望 ... 30
5.1 結論 ... 30
5.2 未來展望 ... 31
REFERENCE ... 32
LIST OF FIGURES
圖 1 水平撲翼(Stolpe & Zimmer, 1939)... 34
圖 2 傾斜撲翼(Norberg, 1976) ... 34
圖 3 垂直撲翼(C. Ellington, 1984) ... 34
圖 4 不同物種之雷諾數(C. Ellington, 1984) ... 35
圖 5 UAV 總重量與翼展長取對數(http://uav.wff.nasa.gov/db/uav_index.html) ... 35
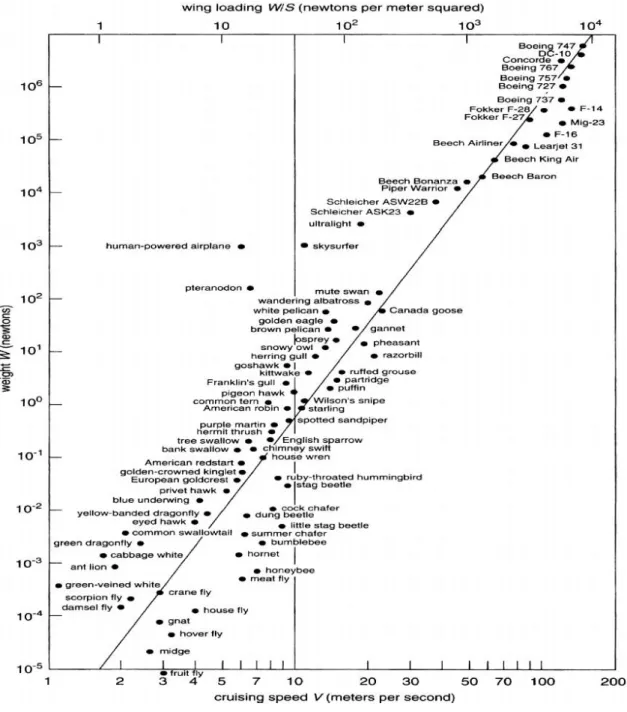
圖 6 飛行體重量與巡弋速度取對數(Bohorquez, 2006) ... 36
圖 7 實驗水槽 ... 37
圖 8 角度固定塊 ... 37
圖 9 黏度計 ... 38
圖 10 運動控制系統 ... 39
圖 11 受力量測系統 ... 40
圖 12 六軸量力感測器 ... 41
圖 13 Spectra-Physics 氬離子連續雷射 ... 41
圖 14 電子耦合攝影機(CCD)與 Nikon 35mm 定焦鏡頭 ... 42
圖 15 顯影粒子 PSP-50 ... 42
圖 16 使用砝碼量力校正 ... 43
圖 17 三軸量力校正 ... 44
圖 18 環流升力 ... 45
圖 19 尾渦度 ... 45
圖 20 環流與升力的增強(Wagner, 1925) ... 46
圖 21 延遲失速(Francis & Cohen, 1933) ... 46
圖 22 阻力係數實驗與模擬比較,展弦比 2,雷諾數 300 ... 47
圖 23 升力係數實驗與模擬比較,展弦比 2,雷諾數 300 ... 47
圖 24 阻力係數實驗與模擬比較,展弦比 3,雷諾數 300 ... 48
圖 25 升力係數實驗與模擬比較,展弦比 2,雷諾數 300 ... 48
圖 26 AR1 Re300,阻力係數對無因次時間 ... 49
圖 27 AR1 Re300,升力係數對無因次時間 ... 49
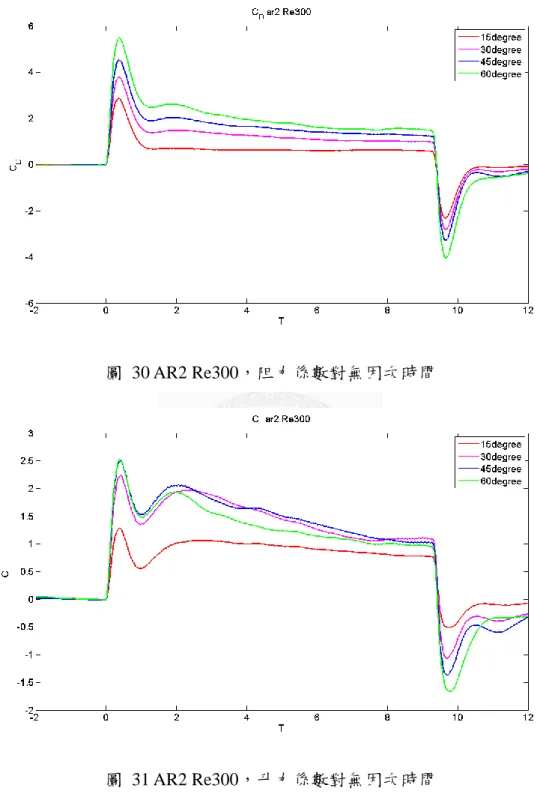
圖 28 AR2 Re100,阻力係數對無因次時間 ... 50
圖 29 AR2 Re100,升力係數對無因次時間 ... 50
圖 30 AR2 Re300,阻力係數對無因次時間 ... 51
圖 31 AR2 Re300,升力係數對無因次時間 ... 51
圖 32 AR3 Re100,阻力係數對無因次時間 ... 52
圖 33 AR3 Re100,升力係數對無因次時間 ... 52
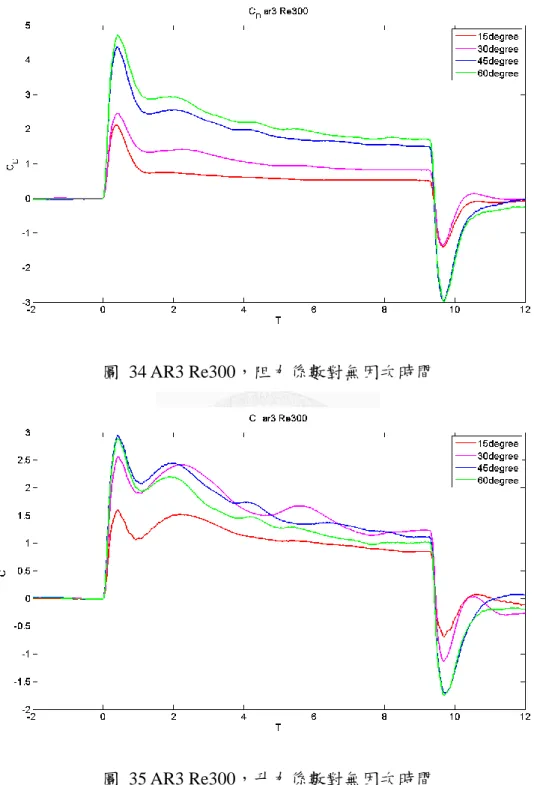
圖 34 AR3 Re300,阻力係數對無因次時間 ... 53
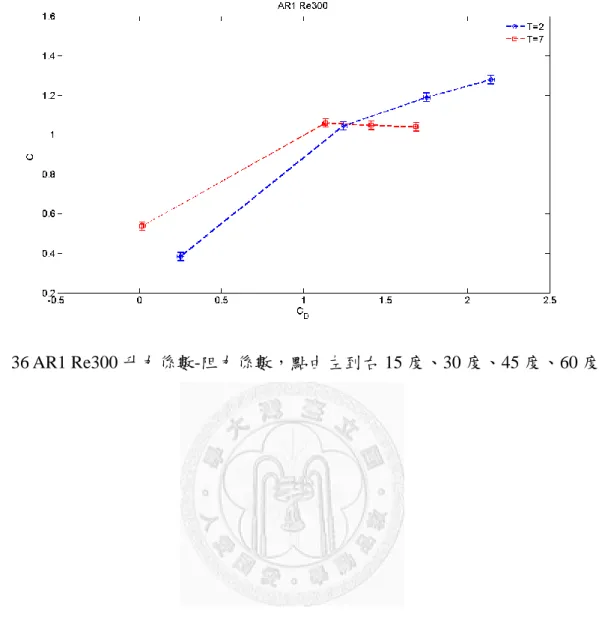
圖 35 AR3 Re300,升力係數對無因次時間 ... 53 圖 36 AR1 Re300 升力係數-阻力係數,點由左到右 15 度、30 度、45 度、60 度 54 圖 37 AR2 Re100 升力係數-阻力係數,點由左到右 15 度、30 度、45 度、60 度 55 圖 38 AR2 Re300 升力係數-阻力係數,點由左到右 15 度、30 度、45 度、60 度 55 圖 39 AR3 Re100 升力係數-阻力係數,點由左到右 15 度、30 度、45 度、60 度 56 圖 40 AR3 Re300 升力係數-阻力係數,點由左到右 15 度、30 度、45 度、60 度 56 圖 41 AR2 Re100 升阻力係數比值-攻角,點由左到右 15 度、30 度、45 度、60 度57 圖 42 AR2 Re300 升阻力係數比值-攻角,點由左到右 15 度、30 度、45 度、60 度57
圖 44 AR3 Re300 升阻力係數比值-攻角,點由左到右 15 度、30 度、45 度、60 度58
圖 45 Re300 T=2,阻力係數-展弦比 ... 59
圖 46 Re300 T=7,阻力係數-展弦比 ... 59
圖 47 Re300 T=2,升力係數-展弦比 ... 60
圖 48 Re300 T=7,升力係數-展弦比 ... 60
圖 49 AR2 Re100 攻角 15 度渦度與速度場圖(上到下:T=0.42、T=0.86、T=2.38; 左:xˆ 0.5 右:xˆ 0.9 ) ... 61
圖 50 AR2 Re100 攻角 30 度渦度與速度場圖(上到下:T=0.42、T=0.86、T=2.38; 左:xˆ 0.5 右:xˆ 0.9 ) ... 62
圖 51 AR2 Re100 攻角 45 度渦度與速度場圖(上到下:T=0.42、T=0.86、T=2.38; 左:xˆ 0.5 右:xˆ 0.9 ) ... 63
圖 52 AR2 Re100 攻角 60 度渦度與速度場圖(上到下:T=0.42、T=0.86、T=2.38; 左:xˆ 0.5 右:xˆ 0.9 ) ... 64
圖 53 AR3 Re100 攻角 15 度渦度與速度場圖(上到下:T=0.42、T=0.86、T=2.38; 左:xˆ 0.5 右:xˆ 0.9 ) ... 65
圖 54 AR3 Re100 攻角 30 度渦度與速度場圖(上到下:T=0.42、T=0.86、T=2.38; 左:xˆ 0.5 右:xˆ 0.9 ) ... 66
圖 55 AR3 Re100 攻角 45 度渦度與速度場圖(上到下:T=0.42、T=0.86、T=2.38; 左:xˆ 0.5 右:xˆ 0.9 ) ... 67
圖 56 AR3 Re100 攻角 60 度渦度與速度場圖(上到下:T=0.42、T=0.86、T=2.38; 左:xˆ 0.5 右:xˆ 0.9 ) ... 68 圖 57 AR2 Re300 攻角 30 度曝光圖(上到下:T=0.45、T=0.95、T=2.41;左:xˆ 0.5
右:xˆ 0.9 ) ... 69 圖 58 AR2 Re300 攻角 45 度曝光圖(上到下:T=0.45、T=0.95、T=2.41;左:xˆ 0.5
右:xˆ 0.9 ) ... 70 圖 59 AR2 Re300 攻角 60 度曝光圖(上到下:T=0.45、T=0.95、T=2.41;左:xˆ 0.5
右:xˆ 0.9 ) ... 71 圖 60 AR3 Re300 攻角 30 度曝光圖(上到下:T=0.45、T=0.95、T=2.41;左:xˆ 0.5
右:xˆ 0.9 ) ... 72 圖 61 AR3 Re300 攻角 45 度曝光圖(上到下:T=0.45、T=0.95、T=2.41;左:xˆ 0.5
右:xˆ 0.9 ) ... 73 圖 62 AR3 Re300 攻角 60 度曝光圖(上到下:T=0.45、T=0.95、T=2.41;左:xˆ 0.5
右:xˆ 0.9 ) ... 74 圖 63 AR2 Re100 yˆ 0.8 攻角 15 度翼尖渦度與速度場圖(上到下:T=0.86、
T=2.38、T=6.89) ... 75 圖 64 AR2 Re100 攻角 15 度翼尖渦度與速度場圖(上到下:T=0.86、T=2.38、T=6.89;
左: ˆy0.5 右: ˆy0.1) ... 76 圖 65 AR2 Re100 yˆ 0.8 攻角 30 度翼尖渦度與速度場圖(上到下:T=0.86、
T=2.38、T=6.89) ... 77 圖 66 AR2 Re100 攻角 30 度翼尖渦度與速度場圖(上到下:T=0.86、T=2.38、T=6.89;
左:yˆ 0.5 右:yˆ 0.1 ) ... 78 圖 67 AR2 Re100 yˆ 0.8 攻角 45 度翼尖渦度與速度場圖(上到下:T=0.86、
T=2.38、T=6.89) ... 79
左:yˆ 0.5 右:yˆ 0.1 ) ... 80 圖 69 AR2 Re100 yˆ 0.8 攻角 60 度翼尖渦度與速度場圖(上到下:T=0.86、
T=2.38、T=6.89) ... 81 圖 70 AR2 Re100 攻角 60 度翼尖渦度與速度場圖(上到下:T=0.86、T=2.38、T=6.89;
左: ˆy0.5 右: ˆy0.1) ... 82 圖 71 AR2 Re300 yˆ 0.8 攻角 15 度翼尖渦度與速度場圖(上到下:T=0.95、
T=2.41、T=6.9) ... 83 圖 72 AR2 Re300 攻角 15 度翼尖渦度與速度場圖(上到下:T=0.95、T=2.41、T=6.9;
左:yˆ 0.5 右:yˆ 0.1 ) ... 84 圖 73 AR2 Re100 yˆ 0.8 攻角 30 度翼尖渦度與速度場圖(上到下:T=0.95、
T=2.41、T=6.9) ... 85 圖 74 AR2 Re300 攻角 30 度翼尖渦度與速度場圖(上到下:T=0.95、T=2.41、T=6.9;
左:yˆ 0.5 右:yˆ 0.1 ) ... 86 圖 75 AR2 Re100 ˆy0.8攻角 45 度翼尖渦度與速度場圖(上到下:T=0.95、
T=2.41、T=6.9) ... 87 圖 76 AR2 Re300 攻角 45 度翼尖渦度與速度場圖(上到下:T=0.95、T=2.41、T=6.9;
左:yˆ 0.5 右:yˆ 0.1 ) ... 88 圖 77 AR2 Re100 yˆ 0.8 攻角 60 度翼尖渦度與速度場圖(上到下:T=0.95、
T=2.41、T=6.9) ... 89 圖 78 AR2 Re300 攻角 60 度翼尖渦度與速度場圖(上到下:T=0.95、T=2.41、T=6.9;
左:yˆ 0.5 右:yˆ 0.1 ) ... 90
LIST OF TABLES
表 2-1 單軸機械手臂 FLIP-X 系列 T9 型簡易規格表 ... 6
Chapter 1 Introduction
1.1 前言
飛機被評論為二十世紀最偉大的發明之一,大幅縮短了人與人之間的距離,
實現了世界地球村的夢想。從萊特兄弟算起,人類發展飛行器已超過一百,在固 定翼(Fixed-Wing)與旋翼(Rotary-Wing)飛行器更著相當高的發展技術。但檢視生物 的拍撲翼(Flapping Wing)飛行,昆蟲和小型的鳥類可以產生牠們本身重量 2~12 倍 的力(Bohorquez, 2006),傳統穩態的空氣動力學無法解釋此一現象,且生物飛行的 靈巧與機動性是人造飛行器難以望其項背,例如:原地起飛、懸停(Hovering)、瞬 間轉彎、高攻角爬升。生物依撲翼平面角度的不同,可分成三種(1)水平撲翼(2)傾 斜撲翼(3)垂直撲翼(圖 1~圖 3),三種撲翼平面常見的生物物種及雷諾數(Reynolds Number)列於圖 4,可看到生物的飛行機制更著很高的多樣性及複雜的模式。
由於國土防禦、軍事探測等需求,無人飛行器(Uninhabited Air Vehicles, UAV) 是目前許多國家發展的重點,而微飛行器(Micro Air Vehicle, MAV)因為高機動性與 高隱密性的考量,亦是發展的其中一項要點。微飛行器的定義為長度不超過 6 英 寸,總起飛重量大約 200 克或更少,由於尺寸、重量與傳統的飛行器更很大的不 同處,空氣動力性質與傳統飛行器會更差異,設計上面臨新的挑戰。
微飛行器依機構的不同可分為三種,固定翼、旋轉翼以及拍撲翼。拍撲翼的 運動模式複雜,產生的流場為非定常流場,傳統的空氣動力學尚不能對此做一完 整的分析。所以藉由對鳥、昆蟲飛行運動的觀察後,建立模型,利用實驗的量測 及計算機的數值模擬探討飛行機制為現階段研究者的主要目標。
1.2 文獻回顧
(C. Ellington, 1984)發表一系列更關撲翼飛行的文章,統整那個時候研究仿生 飛行的進展,分別對撲翼飛行的近穩態分析(The Quasi-Steady Analysis)、型態參數 (Morphological Parameters) 、 運 動 學 (Kinematics) 、 空 氣 力 學 (Aerodynamic Mechanisms)等做一介紹。(Dickinson & Gotz, 1993)以實驗的方式,探討平板在低雷 諾數(Ο(101~102))下非定常(Unsteady)流場的受力情況,並在翼端兩側裝設大平板來 限制翼尖渦(Wing Tip Vortex)的發展,做二維流場的暫態分析,指出剛啟動時的前 緣渦(Leading Edge Vortex)會使得升力增加,並發現會更前緣渦和後緣渦交互產生 的馮卡門(Von Kármán)渦漩產生。(Jane Wang, 2000; Wang, 2000)用數值計算模擬二 維撲翼,討論前緣渦與後緣渦(Trailing edge vortex)交互產生噴流的機制,計算出二 維撲翼運動可產生足夠的升力來支撐昆蟲的重量,以漩渦動力學(Vortex Dynamic) 闡明翼板平移與轉動的相位關係及其對升力所造成的影響。考慮翼展方向流動 (Spanwise flow)與翼尖效應,三維流場的研究引起關注。(C. P. Ellington, Van Den Berg, Willmott, & Thomas, 1996)由撲翼機械模型觀察到翼板在往下行程(Down Stroke)因動態失速(Dynamic Stall)產生的前緣渦,此前緣渦更足夠的強度造成高升 力的表現,並指出翼展方向流動速度可與撲翼的速度相比擬,是穩定前緣渦的要 素。(Birch & Dickinson, 2001)藉由在翼板上裝設擋板來限制展向流的發展,並沒更 造成前緣渦的脫離(Detachment),提出翼尖渦產生的向下流動限制了前緣渦的發 展。(Birch, Dickson, & Dickinson, 2004)比較在兩種雷諾數(120、1400)下撲翼的表 現,發現兩種雷諾數下都沒更漩渦脫落(Vortex Shedding)的情況,且在雷諾數為 1400 時,前緣渦核心更密集的展向流,此在雷諾數 120 時並無發現。
四種不同形狀的平板,展弦比 0.5~2.0 間,在雷諾數105升阻力係數的表現,是在 穩態的條件下測得。(Freymuth, Bank, & Finaish, 1987)就四種不同形狀平板放置在 風洞中,風洞從靜止以等加速度啟動,在風洞啟動前釋放煙霧,拍攝渦流隨時間 的變化。(Ringuette, Milano, & Gharib, 2007)用低展弦比的平板浸入水中,在水中的 一端為自由端,攻角 90 度,從靜止開始拖曳,觀察渦漩發展的情形,並指出翼尖 渦使平板產生最大的阻力,抑制翼尖渦的發展會使阻力產生最小值。數值模擬方 面,(Cosyn & Vierendeels, 2006)用 Fluent 軟體探討低雷諾數(105)、展弦比 0.5~2 三 維流場升阻力係數,是在穩態之下探討,且在低攻角的情況,並沒更探討攻角在 失速後(Post-Stall)非定長的分離流(Separated Flows)和渦流。
1.3 研究動機與目的
圖 5 代表 UAV 資料,縱軸橫軸分別為總重量(kg)及翼展長(m)取對數,可看出 線性趨勢:隨著總重量的降低,翼展長也減小;圖 6 代表大部分飛行物體,包括 飛機、鳥類、昆蟲的資料,縱軸橫軸分別為重量(N)與巡弋速度(m/s)取對數,可看 到線性趨勢:重量降低,巡弋速度跟著降低。由這兩張圖可對 MAV 歸納出兩點:
(1)由於翼展長變小,相對而言展弦比(Aspect Ratio)變小了。(2)低的巡弋速度,代 表飛行在較低的雷諾數情況下。
低展弦比的情況下,翼尖渦的影響及其與前緣渦的交互作用變得重要許多;
在低雷諾數下,許多複雜的現象可能在邊界層(Boundary Layer)發生,例如:流動 分離 (Separation)、過渡流(Transition Flow)、流體再附著(Reattachment)。所以本實 驗將以低展弦比平板在低雷諾數下,以高攻角從靜止加速到一定速度量測其升阻
力隨時間的變化,並配合雷射切頁顯影,就前進方向與垂直前進方向做切頁,以 PIV 作分析,觀察速度場與渦度場隨時間的變化,研究非定長流場的機制。一般飛 行的生物在翼往下拍翅時會移動 2~4 的弦長(Dickinson & Gotz, 1993),研究啟動流 場的機制將對釐清昆蟲飛行複雜的流場機制更所助益。
Chapter 2 實驗設備與實驗方法
2.1 實驗設備
2.1.1 實驗水槽
實驗水槽長 160 公分、寬 130 公分、深 45 公分,由鋼樑構成,四周與底面更 強化玻璃以方便流場觀測(圖 7),並更鋼架在底部做支撐。水槽上方 YAMAHA 的 機械手臂直接由地面支撐,此是為了避免機械手臂的震動經由水槽影響流場及量 力。
機械手臂經由鋁擠型支架固定六軸量力感測器,六軸量力感測器連結直徑 8mm 鋼棒、聯軸器、直徑 5mm L 型鋼棒、平板,L 型鋼棒與較細的鋼棒是為了減 少在流體中與平板的影響。平板與鋼棒之間由壓克力塊作固定,不同壓克力塊的 角度會更不同的攻角(圖 8),分別更 15°、30°、45°、60°。平板的材質為壓克力,
弦長(chord) 82mm,展弦比更 1、2、3 三種,厚度為 3mm。
2.1.2 黏度計(Viscometer)
黏度計是 Brookfield 製,型號 LVTDV-IICP,為數位型黏度計(圖 9)。附件更 不同尺寸的轉子(Spindle),依照所要量測流體的黏度範圍,選定適合的轉子,再鍵 入其轉子編號。將轉子浸入待測流體,選擇適當的轉速,使得黏度計所測得的扭 矩盡量接近 100%,扭矩超過 100%會顯示 error;低於 10%量測結果不準確。確認 量測扭矩在適當範圍內後,按下 cps 鍵,由黏度計內建的參數將扭矩轉換成黏滯係 數。
2.1.3 運動模擬系統
直線運動使用 YAMAHA 機械手臂,型號為 FLIP-X,由 YAMAHA SRCX 驅 動器透過 RS232 序列埠連接電腦,並由 POPCOM 軟體直接修改運動參數及撰寫控 制指令來達到所需求的運動(圖 10)。機械手臂簡易規格如下表
表 2-1 單軸機械手臂 FLIP-X 系列 T9 型簡易規格表 單軸機械手
臂型號
馬達功率 (W)
重複定位精 度(mm)
最高速度 (mm/sec)
最大可搬質 量(kg)
定格推力 (N) T910-1050 1.3 ±0.01 600 55 156
2.1.4 受力量測系統
受力量測系統包括防水型六軸力規感應器、訊號放大器和訊號擷取裝置。六 軸力規感應器可將受力所產生的應變(Strain)轉成電壓訊號,透過訊號放大器、I/O 接線盒,最後傳送到電腦上的 DAQ 擷取卡,將資料儲存於電腦的硬碟(圖 11)。
2.1.4.1 防水型六軸力規感應器
防水型六軸力規感應器與訊號放大器是由美國 Bertec Corporation 公司設計製 造,如圖 12,力規的外型為圓柱體,材質是鋁合金,直徑 7 cm,高 8 cm,上下 兩端更螺紋可供固定。量測力和力矩的範圍分別是±2N 及±0.3N-m,解析度為 0.01N。力規內部更六組惠斯同電橋(Wheatstone Bridge),每一組皆更四個應變規組 成全橋電路(Full Bridge)。由全橋電路組成的惠斯同電橋其輸出的電壓直很小,頇 經由訊號放大器來加強訊號,增加辨識率及減少雜訊比。
2.1.4.2 訊號擷取裝置
訊號擷取裝置使用美商國家儀器公司(National Instruments)的產品,包括抗雜 訊 I/O 接線盒(SCB-68)、DAQ 資料擷取卡(PCI 6221 M-series)及 NI 虛擬儀表的儀器 控制軟體(LabView 8.0)。軟體透過程式的撰寫,更濾波的功能,可消除不必要的雜 訊;圖形化的介面讓資料的擷取和存取更很大的便利性。
2.1.5 流場量測系統
本實驗使用粒子影像測速法(Particle Image Velocimetry, PIV)來分析流場中的 速度場和渦度場。首先由雷射光經過凸面柱鏡產生光頁,流場中添加顯影顆粒,
顆粒會反射雷射光,再由 CCD 擷取影像,經由 PIV 分析軟體 Flowmap 分析連續 兩張影像,可求出流場變化,例如:速度場、渦度場。
2.1.5.1 雷射
本實驗使用氬離子連續雷射(Argon Ion Laser),由美國 Spectra-Physics 公司製 造,型號為 Stabilite2017,輸出波長在 454.4nm~514.5nm,輸出功率在 100mW~2W(圖 13)。將雷射光束經由反射鏡傳到目的地,因傳導距離較遠時光束會發散,先透過 凸透鏡聚集光束,再由凸面柱鏡將光束散成想要的雷射切頁,實驗中的雷射切頁 調整在 2~3mm。雷射要運行時會產生大量的熱,所以開啟雷射前頇先運行冰水主 機,裡面的去離子化水(DI water)會進行循環,將雷射產生的熱量傳送到室外的散 熱器,再由風扇加速散熱到大氣中。
2.1.5.2 電子耦合攝影機(Charge-Couple Device)
實驗使用的 CCD 是 Kodak Megaplus ES1.0 Camera,為黑白攝影機,最大每秒
可拍攝 30 張影像,影像的尺寸為 1008pixels×1018pixels,使用 Nikon Micro Nikkor 焦距 35mm 的定焦鏡頭。(圖 14)
2.1.5.3 流場顯影粒子
顯影粒子更兩種:
(1) 鋁粉(Al):密度 1.07 g/cm3,直徑 50 μm 和 20 μm。
(2) Polyamid Seeding Particles:密度 1.02 g/cm3,直徑 50 μm。
本實驗使用 Dentec 公司生產的 PSP-50(Polyamid Seeding Particles)。圖 15。
2.1.5.4 影像擷取卡及軟體
裝置於電腦上的影像擷取卡是 EPIX 公司生產,用來連接 CCD,使用軟體是 EPIX 公司所附的 XCAP for windows,可存取影像於電腦的隨機存取記憶體 (RAM),再選擇所要的圖像存入硬碟(Hard disk),透過 XCAP 可對 CCD 的參數進 行修改,如更改 CCD 的擷取速度、曝光時間等。
2.2 實驗方法
本實驗以不同攻角、不同展弦比的平板,從靜止加速到穩定速度,觀察其升 阻力與流場隨時間的變化。
2.2.1 運動控制
實驗以 POPCOM 軟體控制機械手臂的作動,可藉由參數調整手臂加速度、終 端速度。由實驗所需的雷諾數及量測到流體的黏滯係數計算出機械手臂的終端速
度。由量力訊號擷取的頻率可算出運動的真實時間 t,再經由無因次化傳換成無因 次化時間 T。
2.2.2 實驗步驟 2.2.2.1 升阻力量測
1. 量測當天氣溫,流體溫度。用黏度計測量流體的黏滯係數,及量測流體的密度。
2. 選取所要展弦比的翼板,鎖上所需要角度的固定塊,固定於量力感測器上。
3. 開啟 Labview 軟體,設定取樣頻率 (Sampling Frequency)為 1000Hz 、使用 Butterworth 濾波,截止頻率設為(Cutoff Frequency)為 1Hz。
4. 開啟 POPCOM 軟體,設定雷諾數 100 時所需的馬達轉速,開始 Labview 量力 並同時啟動馬達。
5. 將機械手臂回歸原點,設定雷諾數 300 時所需的馬達轉速,待二十分鐘流場穩 定後,開始 Labview 量力並啟動馬達。
6. 更換角度塊,重複 3~5 的動作。
7. 更換翼板,重複 3~6 的動作。
2.2.2.2 流場顯影
1. 將顯影粒子適當地加入水槽中,並攪拌讓它混合均勻。
2. 開啟雷射光的冰水主機,待其運轉三十分鐘後再打開雷射。
3. 依所需的雷射切頁位置架設凸透鏡及柱面鏡,調整使其切頁厚度 2~3mm。
4. 裝設 CCD 攝影機,使其垂直於雷射切面,調整焦距,讓顯影粒子清晰對比大。
5. 開啟 XCAP 軟體,調整曝光時間及每秒拍攝張數。
6. 啟動機械手臂,同時按下 XCAP 的 record 開始拍攝影像。
7. 更換角度塊,重複 4~6。
8. 更換翼板,重複 4~7
9. 更換雷射切頁位置,重複 3~8
2.2.3 實驗訊號分析 2.2.3.1 量力訊號分析
1. 為了確認所量測到的電壓值與所受的力如何換算,以及是否成線性關係,
必頇先做量力校正,以砝碼懸掛在滑輪下做 X 軸、Y 軸、Z 軸三軸的校正 (圖 16)。從 0g 開始,每次增加 10g 直到 200g 為止,分別記錄其電壓值,
結果如圖 17,可看到線性度相當好,並在圖中附更趨勢線的方程式,之 後量測到的電壓便以此方程式換算成力。
2. 在紀錄的訊號中,更高頻雜訊的干擾,使用 Labview 裡附更的程式功能做 濾波的動作,運算方法為 Butterworth Low Pass Filter,運算階數為 2 階,
截止頻率為 1Hz。
3. 在開始實驗前都必頇先將六軸量力感測器做歸零的動作,但歸零後電壓的 基準值並不完全為零,更些許偏差,所以在處裡數據時再使機械手臂未作 動前所量測到的訊號歸零。
4. 本實驗設定擷取訊號的頻率為 1000Hz,所以每 0.001 秒量測一次訊號,如 此可得知量力隨時間的變化曲線。
2.2.3.2 流場影像分析
使用粒子影像測速儀(Particle Image Velocimetry)來做流場影像的分析,計算軟
1. 先確定圖像畫素與真實尺度的比例尺,由圖像中抓取兩點已知的距離,本 實驗採用翼板弦長,在計算兩點距離的畫素,便可得比例尺。
2. 圖像被分割成很多的審訊視窗(Interrogation Window),由訊號處理抓取圖 像上顯影顆粒的亮點及兩張圖像間的互相關(Cross-Correlation)可計算出位 移向量,再由比例尺可換算真實尺度的位移向量,配合 CCD 抓取圖像的 間隔時間,可得到速度向量。
3. 圖像網格化,將上步得到的速度向量使用內插的方式,可得流場的速度場 分布。
4. 網格化的速度場,進行差分的動作,便可以得到渦度值。
本實驗使用的互相關分析是自適應相關(Adaptive Correlation),它是一種迭代 的過程,從第一個視窗(整個像幅(Image Frame))猜測一個位移量所得到的值,代入 第二個視窗(更小的視窗);得到的向量被用來當作視窗位移量的估計值,代入更小 的視窗。
Chapter 3 理論分析Equation Chapter 3 Section 1
3.1 動態比例
3.1.1 展弦比(Aspect Ratio)
面積是長方形的平板,其弦長(Chord)為 c,翼展(Spanwise)長度為 s,展弦比 (AR)定義為翼展長對弦長的比值。
AR s
c (3.1)
對於大多數的翼板而言,弦長不是定值,會隨著翼展而變,假設翼板面積為 A,
展弦比又可定義為
s2
AR A (3.2)
3.1.2 雷諾數(Reynolds Number)
雷諾數在流體力學中是十分重要的無因次化參數,代表的是流體中慣性力與 黏滯力的比值,可以用雷諾數的大小來區分流場的型態。昆蟲及小型鳥類的飛行,
雷諾數介於 102~104之間。雷諾數定義為
Re UL UL
(3.3)
其中μ 是動態黏滯係數(Dynamic Viscocity)[ kg
m s ],ρ 是流體密度[kg3
m ],U 是 移動速度[m
s ],L 為特徵長度[m],本實驗用弦長 c 代表特徵長度;υ 運動黏滯係
數(Kinematic Viscocity)[
m2
s ],等於動態黏滯係數與密度的比值。
3.1.3 無因次時間
數據處理時,會將真實時間 t 換成無因次時間 T,即T Ut
c ,此項可看成行走 路徑是幾倍的弦長。
3.1.4 升力係數(CL)
升力係數(Lift Coefficient)是將翼板或物體在流體中所受的升力 FL(Lift Force) 無因次化,升力定義為與入流方向垂直的力。升力係數亦可代表升壓與動壓的比 值。
1 2
2
L L
C F
U A
(3.4)
在穩態直線運動中,升力常以環流升力(Circulatory Lift)來計算。考慮一翼板 以速度 U 做直線運動,攻角α未達到失速,若翼板不產生升力,由伯努力定律 (Bernoulli’s Theorem)翼板上方與下方的平均壓力會相同,翼板前後的流線會是對 稱的,翼板上方的流線在到達後緣前產生分離,如圖 18 第一張圖。但此在物理上 是不可能的,因流過後緣尖端的流速會變成無限大,產生無限大的剪應力。
為更正此現象,從後緣脫落的流線必頇平滑地與後緣相切,此稱為庫塔條件 (Kutta Condition)。為達到庫塔條件,需在流場中加入環流,使得翼板上方的平 均流速變快;而翼板下方的平均流速變慢,圖 18。所以由此環流所產生的單位翼 展長升力 'L 為庫塔—儒可夫斯基定理(Kutta –Joukowski Theorem)
'
L U (3.5)
3.1.5 阻力係數(CD)
阻力係數(Drag coefficient)是將翼板或物體在流體中所受的阻力 FD(Drag Force)無因次化,阻力定義為與入流方向平行的力,平板在流場中受到阻力可分為 三部分:(1)表面摩擦(Skin Friction),是由邊界層中黏滯性產生的剪應力(Shearing Stress)所造成。(2)壓力阻力(Pressure Drag),流場分離產生的尾流是一低壓區,由 壓差所造成的阻力。(3)誘導阻力(Induced Drag),翼板產生升力時會使入流的速度 改變,速度改變所產生的反作用力是誘導阻力的來源。阻力係數可代表物體在流 體環境中所受阻抗的情形
1 2
2
D D
C F
U A
(3.6)
3.2 基礎理論
3.2.1 近穩態假設(The Quasi-Steady Assumption)
在非定常運動中,作用在翼板連續的力可被假設為穩態中相同速度與攻角所 受的力。雖然速度 U 與攻角α會隨著時間改變,但他們的過去與現在無關,所以 翼板所受的力只與那個瞬間符合庫塔條件的環流量q更關。此環流量q包含兩種 (1)符合直線運動的環流量t。(2)符合旋轉運動的環流量r。
3.2.2 尾渦度(Wake Vorticity)
為符合凱爾文環流定律(Kelvin’s Circulation Theorem),附著渦(Bound Vortex) 的強度若改變d,會更一強度大小相同但方向相反的環流 d 從後緣脫落到尾 流,環流的總和必頇為零,圖 19 (a)。單一渦的流線為同心圓,速度為
w 2
r
(3.7)
r 為離渦心的距離,但此式在離渦心很近時不成立。而尾流渦的速度場會使翼板附 近的流場更一w 2l速度,如圖 19 (b),l為尾流渦心到翼板的距離。除了啟 動分離的漩渦之外,另一種更好的模型是渦度連續分布─渦流面(Vortex Sheet),如 圖 19 (c)。
3.2.3 華格納效應(The Wagner Effect)
華格納效應是指當傾斜翼從靜止開始加速時,因黏滯力的因素,環流會逐漸 到達穩定的狀態,如圖 20,以近穩態值當分母表示,為以弦長當無因次化的距 離。在值小時,尾渦度就更很大的影響了,之後趨向定值,即使在是 6 時,環 流和升力都只更近穩態的 90%。
渦漩從後緣脫落造成環流連續改變,此改變速度會慢於近穩態環流q,所以,
在開始運動時,產生的環流量和近穩態的假設會更所出入。
3.2.4 延遲失速效應(Delayed Stall)
高攻角時,翼板移動了幾個弦長的距離之後,才會產生流場分離以及失速。
在翼板剛開始移動時,會量測到比穩態失速時還大的環流量,而當翼板上表面的
流場發生分離時,此增強的環流量會逐漸地下降。
圖 21 代表攻角比穩態失速時大所產生的延遲失速效應,環流量在前三個弦長 距離的移動逐漸上升,與華格納理論相符,三個弦長到五個弦長的距離之間幾乎 維持穩定。值得注意的是,環流量穩定趨向近穩態假設所預測的環流量q,而 非穩態失速時的環流量max,直到失速發生。(Walker, 1931)研究攻角 27.5 度的環 流量與升力,實驗發現翼板剛啟動的前幾個翼弦長時,所量測到的環流係數比所 預測的最終值高 50%,證明了延遲失速可以更效地增加升力。
Chapter 4 實驗結果與討論
4.1 實驗參數
將平板由靜止開始拖曳,拖曳距離為 1050mm。經由黏度計量測到 85%甘油與 15%水混合溶液的動態黏滯係數為 35.6 cps,在實驗前都會進行量測,以防止因溫 度改變造成動態黏滯係數變化;利用 1000cc 容器與電子磅秤可得到混合溶液的比 重 1190 kg/m3。配合翼板弦長 82mm,可算得對應於雷諾數 100 與 300 的機械手臂 速度分別是 36 mm/s 與 109 mm/s。
量力系統的取樣頻率設為 1000Hz,使用低通濾波,濾波方法為 Butterworth low pass filter,運算階數為 2 階,截止頻率為 1Hz。流場顯影使用的 CCD 擷取圖像的 頻率為 30Hz,在擷取來做 PIV 分析的影像時,曝光時間設為 10 msec,在擷取粒 子軌跡時,曝光時間設為 30 msec。
本實驗做兩種方向的雷射切頁。第一種平行於平板的行進方向,假設翼展長
中心為原點,朝向翼尖方向為 x ,原點到達翼尖的距離為 2s ,另 ˆ 2 x x
s ,分別在 ˆ 0.5
x 與xˆ 0.9 做雷射切頁,CCD 架設於機械手臂上跟著移動,觀察離翼尖不同 距離其前緣渦與後緣渦隨時間的發展變化。第二種垂直於平板的行進方向,雷諾 數 100 在行走路徑無因次化時間分別為 T=0.86、T=2.38 與 T=6.89 做雷射切頁,雷 諾數 300 在行走路徑無因次化時間分別為 T=0.95、T=2.41 與 T=6.9 做雷射切頁,
CCD 固定於翼板後方觀察其翼尖渦隨平板經過雷射切頁的發展情形,在三種雷射 切頁位置分別對翼板的兩個位置做數據分析觀察翼板上同一位置翼尖渦隨時間的
變化,假設翼板後緣為原點,朝向前緣方向為 y ,令 ˆ y
y c,在 ˆy0.1與 ˆy0.5、 ˆ 0.8
y 處計算他們的渦度值與速度場,並與第一種雷射切頁的方式所照出來的影
像做比對。
使 用 粒 子 圖 像 測 速 作 流 場 分 析 , 分 析 的 方 法 為 自 適 應 相 關 (Adaptive Correlation),審訊視窗的大小設為 32x32 畫素,橫向與縱向的重疊範圍都設為 25%。
4.2 受力量測
4.2.1 與數值結果比對
與本實驗學長李健誌用 Fluent 模擬的結果作比較,圖 22 與圖 23 為展弦比 2 雷諾數 300 阻力係數和升力係數實驗結果與數值結果比較,圖 24 與圖 25 為展弦 比 3 雷諾數 300 阻力係數和升力係數實驗結果與數值結果比較。因數值模擬是在 均勻流場中突然出現一塊平板,所以在 T=0 時會更接近無限大的升阻力,然而在 現實生活中是由機械手臂加速平板,其加速度儘管很大但還是更限的,所以會出 現在啟動與停止時波峰的現象。屏除啟動與停止的峰值,可發現數值模擬與實驗 結果的趨勢相近,在圖 25 攻角 30 度的比對,還可看到實驗與數值模擬更著一樣 頻率的震盪。但數值模擬的值平均比實驗的值大 1~2 倍,主要的可能原因更兩個,
(1)角度固定塊影響到翼尖渦與前緣渦的發展。(2)實驗在水槽中進行,可能會更壁 面效應(Wall Effect)的影響。
4.2.2 升阻力係數
圖 26 與圖 27 分別代表展弦比 1,雷諾數 300 不同攻角的阻力係數和升力係 數,可以看到阻力係數在 T 大於 1,升力係數在 T 大於 2 之後,便呈現一穩定的 狀態,剛開始加速時會更峰值,此主要更兩個原因:(1)慣性力(Inertial Force),因 支架和平板質量加速時所受的力。(2)附加質量(Added Mass),在加速過程中帶動周 遭流體移動所產生的力,會和平板的角度更很大的關聯。測試不同的加速度,發 現只更剛開始的峰值大小會更變化,對於穩定時的量力並無影響。
展弦比為 1,雷諾數 300 時,其阻力係數隨著攻角增加而變大,又以 15 度與 30 度的落差較大;升力係數方面也是一樣,15 度更著較大的落差,而且,30 度 45 度、60 度的升力係數在 T=2 時更些許的差異,之後三個攻角維持差不多的值。
在攻角角度較大時,升力係數在 T=2 時會更一較高的峰值,在攻角 15 度時,升力 係數緩慢上升。
圖 28 與圖 29 是展弦比 2,雷諾數 100 不同攻角的阻力係數與升力係數。雷 諾數 100 所受的力較小,電壓訊號雜訊的誤差值顯得較大。阻力係數隨著攻角變 大而增加。阻力係數在啟動後很快地維持一定值;升力係數在啟動時更較大的差 異,攻角 60 度比 30 度、45 度更較大的升力係數,此或許是因為高攻角所造成強 烈的前緣渦,在之後的流場顯影會再做討論。而攻角 15 度的升力係數更延遲爬升 的現象,符合華格納效應。圖 30、圖 31 展弦比 2,雷諾數 300 不同攻角的阻力 係數與升力係數圖,儘管阻力係數隨攻角增加而變大,但在升力係數方面,只更 15 度的升力係數較低,其他三者的升力係數相當接近,60 度略小於 30 度、45 度。
攻角越大時,升力係數在 T=2 時達到峰值再下滑的現象越明顯,此符合延遲失速 效應:移動距離在前幾個弦長會更暫態環流發生,直到流場分離才開始失速。
圖 32 與圖 33 為展弦比 3,雷諾數 100 不同攻角的阻力係數與升力係數。與 前面不同的是 15 度與 30 度的阻力係數值接近,較 45 度 60 度低。升力係數一樣 是 30 度、45 度、60 度的值接近,較 15 度的值大,攻角 15 度一樣更華格納效應,
升力延遲的現象發生。圖 34、圖 35 展弦比 3,雷諾數 300 不同攻角的阻力係數 與升力係數圖。
4.2.3 極座標圖(Polar Plot)
圖 36 展弦比 1,雷諾數 300 升阻力係數的極座標圖,點由左到右依序是攻角 15 度、30 度、45 度、60 度,無因次化時間 T=2 和 T=7 的時候,點上更標示誤差 範圍(Error Bar),誤差範圍的估算是以流場靜止時量力感測器電壓的震盪範圍約為 2 ~ 3 10 3V,保孚以5 10 3V 計算,轉換成力配合無因次化後所得到的範圍。在 T=2 時,攻角從 30 度升到 60 度的升阻力都更增加,而 T=7 時,攻角從 30 度之後 阻力係數增加,升力係數改變不大略更下滑。
圖 37、圖 38 展弦比 2,雷諾數 100 與 300 升阻力係數的極座標圖,可看到 雷諾數 100 時其誤差範圍頗大,而雷諾數 300 時誤差範圍幾乎與標示點重疊,所 以並沒更標示出來。雷諾數 100 時,T=2 與 T=7 的升阻力係數都隨著攻角增加而 變大。雷諾數 300 時,當攻角從 45 度升到 60 度,阻力係數增加,升力係數降低。
圖 39、圖 40 展弦比 3,雷諾數 100 與 300 升阻力係數的極座標圖。雷諾數 100,T=7,攻角從 45 度到 60 度升力係數增加。搭配展弦比 2,雷諾數 100 可得到 一小歸納,當雷諾數很低在 100 時,高攻角不一定會使得升力係數降低,更時可 帶來更大的升阻力係數。
4.2.4 升阻力係數比值與攻角
圖 41、圖 42 分別是展弦比 2 雷諾數 100、雷諾數 300 的升阻力係數比值與 攻角,在雷諾數 100 時 T=2 比 T=7 更較大的升阻力係數比值,30 度時更最大的升 阻力係數比值。雷諾數 300 時,升阻力係數比值隨著攻角增加而降低。整體而言 當雷諾數從 100 提升到 300 時,升阻力係數比值增加,其中又以攻角 15 度的增加 比例最大,顯示在低攻角時,提高雷諾數可以更效地提高升阻力係數比值。
圖 43、圖 44 分別是展弦比 3 雷諾數 100、雷諾數 300 的升阻力係數比值與 攻角,與展弦比 2 比較,可發現一相同的趨勢,雷諾數 100 時,升阻力係數比值 在攻角 30 度時最大;雷諾數 300 時,升阻力係數比值隨著攻角增加而降低。而相 同地,在展弦比為 3 時,當雷諾數由 100 增加到 300,攻角 15 度的升阻力係數比 值增加最大。
4.2.5 升阻力係數與展弦比
圖 45 代表雷諾數 300,無因次化時間 T=2 時阻力係數與展弦比的關係圖,可 發現無論是哪種角度的平板,其阻力係數隨著展弦比的變動並不大,當展弦比由 2 到 3 時,高攻角的平板比較更上升的趨勢,推測是由於前緣渦較不受翼尖渦的影 響,發展較為穩固造成升阻力的增加;在低攻角時,前緣渦的發展並不如高攻角 時明顯。
圖 46 代表雷諾數 300,無因次化時間 T=7 時阻力係數與展弦比的關係圖,與 T=2 時的趨勢相近,較大的不同是攻角 15 度的阻力係數在展弦比 1 時比展弦比 2、
3 低許多。
圖 47 代表雷諾數 300,無因次化時間 T=2 時升力係數與展弦比的關係圖,如
果之前所提到,攻角 30 度、45 度、60 度的升力係數相近較攻角 15 度高上許多,
此情形在展弦比 1、2、3 時皆成立,且隨著展弦比的增加,四種角度的升力係數 都隨著增加,此代表即使在低雷諾數下,過低的展弦比剛啟動時會無法得到較高 的升力係數。
圖 48 代表雷諾數 300,無因次化時間 T=7 時升力係數與展弦比的關係圖,在 展弦比 1 時無較大的變化,當展弦比增加到 2、3 時,攻角 60 度的升力係數維持 一定,攻角 30 度、45 度的升力係數略更提升。所以我們可以得知,在高攻角時,
藉由提高展弦比來提高升力係數只更在剛啟動時的流場較為更用,在接近穩定的 狀態時,無法發揮效用。
4.3 流場顯影
4.3.1 前緣渦 4.3.1.1 雷諾數 100
前緣渦被認定為昆蟲或鳥類的飛行在非定長狀態下能得到較大升力的原因,
本小節將由渦度與速度場圖探討低雷諾下高攻角前緣渦的發展。
圖 49 是展弦比 2 雷諾數 100 攻角 15 度前緣渦隨時間的發展圖,由上到下分 別是無因次化時間 T=0.42、T=0.86、T=2.38 的時候,左邊三張是雷射切頁位於
ˆ 0.5
x ,即翼展中心線到翼尖一半的距離;右邊三張是雷射切頁位於xˆ 0.9 ,即 靠近翼尖的位置,紅色區域代表逆時針渦度,藍色區域代表順時針渦度,下方兩 條渦度的尺度圖,上面那條是左邊三張的尺度,下面那條是右邊三張的尺度,之
再由速度場產生渦度場時,由於計算選取範圍的問題會使得平板區域更些失真,
白色區域是由翼尖到翼展中心的平板。在xˆ 0.5 高渦度從翼板前緣開始發展,此 時強度較大較密集,時間往後,渦度強度減弱,但範圍變得較大往翼板後緣分散;
ˆ 0.9
x 的情況不大一樣,從翼板開始移動到最後,都保持著分散的渦度,推測是
受到翼尖渦的影響。在剛啟動時,更部分的渦度應是翼尖渦所提供,才會在很短 時間內造成分散的高渦度。
圖 50 是展弦比 2 雷諾數 100 攻角 30 度渦度與速度場圖,和上一張圖一樣的 是在xˆ 0.5 高渦度從翼板前緣發展再逐漸擴散的情形,比較不同的是xˆ 0.9 也更 密集且強烈的渦度,但發生時間較xˆ 0.5 晚,在 T=0.86 才看到。而xˆ 0.5 在 T=0.86 時,可清楚地看到流場分離、再接觸的現象,但沒更形成一漩渦,到了 T=2.38 的 時候,再接觸點往後移,跑出了翼板邊界,翼板背面出現一比較像滯流的區域。
圖 51 是展弦比 2 雷諾數 100 攻角 45 度渦度與速度場圖。在xˆ 0.5 ,T=0.86 的時候,可看到在翼板前緣更一非常強烈的渦度,且翼板背面產生漩渦,到了 T=2.38 的時候,翼板前緣的渦度減弱,而翼板背面的漩渦穩定成長,變得更大。
在xˆ 0.9 ,T=0.42 時,翼板前緣更一密集的渦度,在 T=0.86 時渦度往後緣消散,
並更流場分離的現象,到了 T=2.38 時,流場分離的現象變得更明顯,速度場所指 的方向離翼板更遠些。
圖 52 是展弦比 2 雷諾數 100 攻角 60 度渦度與速度場圖。在xˆ 0.5 ,高渦度 從 T=0.42 在前緣發展,到了 T=0.86 因為漩渦的產生,渦度更分離的現象,到了 T=2.38,漩渦穩定成長變得頗為巨大,但渦度也因此而消散了。在xˆ 0.9 ,從 T=0.42 到 T=2.38 高渦度都一直附著在翼板前緣,但隨著時間更渦度消散和流場分離的現 象。
圖 53 是展弦比 3 雷諾數 100 攻角 15 度渦度與速度場圖。在xˆ 0.5 ,T=0.42 高渦度從翼板前緣開始發展,與展弦比 2 比較不同的地方是,高渦度隨著時間越 來越強烈,並沒更之前消散的現象,推測是因為翼展變長,受到翼尖渦的影響變 少,便能夠穩定地成長。在xˆ 0.9 ,高渦度隨時間從翼板前緣發展往後緣擴散。
圖 54 是展弦比 3 雷諾數 100 攻角 30 度渦度與速度場圖。在xˆ 0.5 ,T=0.42 高渦度從翼板前緣發展,到了 T=2.38 的時候,高渦度幾乎與流場方向平行,翼板 背面更一回流的情況。
圖 55 是展弦比 3 雷諾數 100 攻角 45 度渦度與速度場圖。在xˆ 0.5 ,高渦度 在 T=0.86 隨著渦漩的發展消散,在 T=2.38 的時候,渦漩穩定發展得非常大,翼板 背面幾乎沒更高渦度的存在。值得注意的是在xˆ 0.9 也更前緣渦的的發展,但其 發展較為緩慢,規模沒更xˆ 0.5 的大,可能是因為翼尖渦會擾亂此渦的發展並帶 走部分質量,使得此部分的渦漩無法聚集增大。圖 56 是展弦比 3 雷諾數 100 攻角 60 度渦度與速度場圖,其流場情形與攻角 45 度相當類似。
4.3.1.2 雷諾數 300
因受到實驗所用的 CCD 每秒最高 30 張圖像的限制,在拍攝雷諾數 300 的影 像進行分析時,發現其兩張間粒子所移動的距離會大於粒子間的距離,使得分析 變得不可能,期間雖然更考慮使用高速攝影機,但因為高速攝影機的硬碟內建在 機身裡面,機身頗重,架設在機械手臂上會使得整個機械手臂都在晃動,嚴重干 擾實驗的流場,所以便拉長 CCD 的曝光時間(30ms),使得粒子的移動變成軌跡,
如此一來只要將粒子移動的距離運用像素與真實物件的比例尺計算出來,配合曝 光時間,便可得知粒子的移動速度,所以此長時間曝光圖就某部分而言可代表速
因為雷諾數 300 攻角 15 度的流場與雷諾數 100 沒更什麼差別,所以並沒更個 別討論。圖 57 展弦比 2 雷諾數 300 攻角 30 度曝光圖,T=0.45 時,由曝光圖可看 到更流場分離再接觸的現象。與雷諾數 100 不同的是在xˆ 0.5 ,T=0.95 時翼板背 面形成渦漩,到了 T=2.41 渦漩消散,形成流速緩慢的滯流區。在xˆ 0.9 ,從 T=0.45 到 T=2.41 並沒更渦漩的產生,而在 T=2.41 時,翼板後方的流場更些混亂。
圖 58 展弦比 2 雷諾數 300 攻角 45 度曝光圖,xˆ 0.5 可看到在 T=0.45 前緣渦 從翼板前緣開始發展,到了 T=0.95 渦漩成長範圍變大,與雷諾數 100 不同的是,
在 T=2.41 渦漩消散,並沒更像雷諾數 100 時持續成長。在xˆ 0.9 一樣沒更看到前 緣渦的產生,到了 T=2.41 翼板背面流場比較不規則。圖 59 展弦比 2 雷諾數 300 攻角 60 度曝光圖,xˆ 0.5 流場情況與攻角 45 度時類似。xˆ 0.9 在 T=0.95 流場變 得更些混亂,到了 T=2.41 流場呈現滯流的狀況。此結果對照於量力,符合延遲失 速效應。
圖 60 展弦比 3 雷諾數 300 攻角 30 度曝光圖,xˆ 0.5 在 T=0.45 時更流場分離 再接觸的現象,T=0.95 翼板背面產生渦漩,此現象在雷諾數 100 時並無發生,到 了 T=2.41,渦漩範圍增大。xˆ 0.9 在 T=0.95 也更翼板背面渦漩的產生,但不同的 是,到了 T=2.41 此渦漩消散,變成不規則的流動,應是受翼尖渦的影響。
圖 61、圖 62 分別是展弦比 3 雷諾數 300 攻角 45 度與 60 度的曝光圖,渦漩 在xˆ 0.5 從 T=0.45 成長到 T=2.41 變成很大的渦漩,沒更像展弦比 2 雷諾數 300 時在 T=2.41 渦漩消散,此是因為翼展較長受翼尖渦的干擾較少。在xˆ 0.9 ,T=0.95 還更渦漩的存在,到了 T=2.41 便變成不規則的流動。
值得注意的是,在本實驗雷諾數 100 與 300 不同展弦比與不同攻角的情況下,
均無發現馮卡門渦漩的產生,相較之下(Dickinson, 1993)所作的低雷諾數下展弦比
3 不同攻角的升阻力係數量測卻更發現馮卡門渦漩的現象,兩者之間最主要的差異 在於 Dickinson 的實驗在翼尖的地方加蓋平板來限制翼尖渦的發展,而本實驗是三 維的流場結構,由此可推測:翼尖渦的發展可限制前緣渦的脫落,使其穩固地附 著在翼板背面。
4.3.2 翼尖渦 4.3.2.1 雷諾數 100
圖 63 是展弦比 2 雷諾數 100 攻角 15 度翼尖渦度與速度場隨時間的變化圖,
位置在yˆ 0.8 ,即靠近翼尖的部分,由上到下無因次化時間分別為:T=0.86、
T=2.38、T=6.89。可看到由於壓力差的關係,翼板下方流體經由翼尖往上流動的過 程,而翼板上方的流動現象並不明顯,顯示此時的翼尖渦剛形成,尚未發展穩固,
且此處是前緣渦的高渦度區,前緣渦的影響效力較大。
圖 64 是展弦比 2 雷諾數 100 攻角 15 度翼尖渦度與速度場隨時間的變化圖,
由上到下無因次化時間分別為:T=0.86、T=2.38、T=6.89,左邊三張圖是yˆ 0.5 , 即翼板前緣跟後緣中間的位置; 右邊三張圖是yˆ 0.1 ,即翼板後緣的位置,觀察 這兩個位置的翼尖渦隨時間發展的情形,下方兩條渦度的尺度圖,上面那條是左 邊三張的尺度,下面那條是右邊三張的尺度,之後的圖都依照這種模式。白色區 塊代表翼板,區塊的左端是翼尖,區塊的右端是翼展一半的位置。我們可以看到 流場速度從翼板正面比較高壓的區域,經由翼尖流到翼板上方比較低壓的位置,
形成翼尖渦,此翼尖渦的發展從 T=0.86 到 T=6.89 都很穩固的,並沒更太大的變化,
而高渦度的位置一直位於翼尖的區域,無明顯增強或減弱的現象。比較yˆ 0.5 與
ˆ 0.1 ,翼尖渦會更發展的趨勢,從弦長中間的位置,逐漸變大到翼板後緣的位
置,這在 T=6.89 可明顯的看出。但在圖 64 中,沒更看到翼展向流的現象發生。
圖 65 是yˆ 0.8 展弦比 2 雷諾數 100 攻角 30 度翼尖渦度與速度場隨時間的變 化圖,可發現攻角 30 度的速度場與渦度值比在攻角 15 度時大,且在 T=2.38 與 T=6.89 時更微弱的翼展向流,由翼板中間往翼尖流動。
圖 66 是展弦比 2 雷諾數 100 攻角 30 度翼尖渦度與速度場隨時間的變化圖,
在yˆ 0.5 可以看到高渦度隨時間更減弱的趨勢,在 T=2.38 的時候,高渦度還稍微 離開翼尖。在 ˆy0.1的位置,因為翼板截面隨時間往下移動,所以之前所產生的 翼尖渦會還停留在左上方的位置,一樣我們可以清楚地看到高渦度隨時間減弱的 情況。在 T=2.38 時,翼板上方更兩個方向相反的高渦度區,但強度並不強。
圖 67 是yˆ 0.8 展弦比 2 雷諾數 100 攻角 45 度翼尖渦度與速度場隨時間的變 化圖,可看到攻角 45 度其流場速度分布的範圍較攻角 30 度時為廣,翼板上方的 流速變快且翼展向流更明顯,顯示在高攻角時,翼尖所引發的三維效應會更為顯 著。圖 69 為yˆ 0.8 展弦比 2 雷諾數 100 攻角 60 度翼尖渦度與速度場隨時間的變 化圖,可以看到相同的趨勢。
圖 68 是展弦比 2 雷諾數 100 攻角 45 度翼尖渦度與速度場隨時間的變化圖,
在 T=0.86 時,無論是弦長中間或是翼板後緣的地方,都更兩個方向相反高渦度區 域的形成,在 T=2.38 的時候,高渦度區減弱,T=6.89 時,幾乎看不見高渦度區的 存在,顯示這個時候翼尖渦的規模已發展成較大,但大範圍的內部呈現一較穩定 的狀況。
圖 70 是展弦比 2 雷諾數 100 攻角 60 度翼尖渦度與速度場隨時間的變化圖,
與攻角 45 度時類似,在 T=0.86 時產生兩個方向相反的高渦度,隨著時間高渦度消 散,在 T=6.89 時,翼板後方幾乎沒更翼展方向的流速,呈現類似滯流的區域。
4.3.2.2 雷諾數 300
在雷諾數 300 的情況下,平均渦度值較雷諾數 100 大,更小部分區域因為流 速較大,會更 PIV 抓不到流場速度的情形。
圖 71 為 ˆy0.8展弦比 2 雷諾數 300 攻角 15 度翼尖渦度與速度場隨時間的變 化圖,可看到在 T=0.95 時更著完整的翼尖渦結構,隨著時間的增加,前緣渦的效 應越來越強,翼板上方由翼尖渦產生的速度場變得較不明顯。
圖 72 是展弦比 2 雷諾數 300 攻角 15 度翼尖渦度與速度場隨時間的變化圖,
在yˆ 0.5 的位置,T=0.95 時,翼尖更一高渦度,流場更漩渦產生,並隨著時間增 加而消散。yˆ 0.1 的翼尖渦發展情況與yˆ 0.5 類似。
圖 73 為yˆ 0.8 展弦比 2 雷諾數 300 攻角 30 度翼尖渦度與速度場隨時間的變 化圖,在 T=2.41 時,翼尖更強烈渦度的產生,到了 T=6.9 時此高渦度已經減弱許 多,速度場變得較分散,而非往翼板上方的順時鐘旋轉。且翼板上方流場向上流 動,此應該是由於前緣渦所造成的。
圖 74 是展弦比 2 雷諾數 300 攻角 30 度翼尖渦度與速度場隨時間的變化圖,
在渦度圖中我們可以看到在攻角 30 度的情況下更相當高且密集的渦度產生。
ˆ 0.5
y ,在 T=0.95 時更一高渦度在翼尖的左上方產生,到了 T=2.41 時,高渦度在 翼尖生長,推測應是舊的高渦度消散新的生成,在 T=6.9 時,高渦度消散。 ˆy0.1, 在 T=2.41 時相對應yˆ 0.5 ,高渦度移到翼尖的左上方。
圖 75 與圖 77 為yˆ 0.8 展弦比 2 雷諾數 300 攻角 45 度與 60 度翼尖渦度與速 度場隨時間的變化圖,只更在 T=0.95 時更較明顯翼尖渦結構,在 T=2.41 與 T=6.9 時,速度場往四周為分散,且此時前緣渦效應更加明顯,翼板上方往上流的速度
圖 76 是展弦比 2 雷諾數 300 攻角 45 度翼尖渦度與速度場隨時間的變化圖,
ˆ 0.5
y ,在 T=0.95 時,翼板上方更兩個方向相反的高渦度,隨著時間而消散;在 ˆ 0.1
y ,高渦度強度較yˆ 0.5 弱,範圍變得更點上下拉長。圖 66 是展弦比 2 雷諾 數 300 攻角 60 度翼尖渦度與速度場隨時間的變化圖, ˆy0.5的情況與攻角 45 度 類似,翼板上方更兩個方向相反的高渦度,隨著時間而消散;在yˆ 0.1 ,順時針 方向的高渦度範圍上下拉長,逆時針方向的高渦度範圍較為散亂。
Chapter 5 結論與未來展望
5.1 結論
本實驗在甘油與水的混合溶液下以機械手臂拖曳平板研究低雷諾數
(Re=100、300)下低展弦比高攻角翼板其升阻力特性,所使用翼板的展弦比更 1、2、
3,攻角 15、30、45、60 度,與用顯影粒子配合 PIV 分析流場的發展。實驗成果 整理成以下幾點:
1. 雷諾數 100 與雷諾數 300 之下,翼板攻角與阻力係數成正相關;雷諾數 300 下,展弦比 2 與 3 時,升力係數在攻角 30 度、45 度時更一平坦的高值。
2. 大致上而言,翼板剛啟動時會比穩定狀態更更大的升阻力係數。
3. 在低攻角的情況下,更較大的升阻力係數比值,且剛啟動時的值也比穩定 狀態時的值大。
4. 在雷諾數 300 之下,翼板剛啟動時較高的展弦比會更較大升阻力係數。
5. 在雷諾數 100 時,高攻角會產生穩定的前緣渦漩;雷諾數 300 時,展弦比 2 高攻角所產生的前緣渦漩穩定成長到某一時間,在 T=2.41 時已看得見渦 漩消散呈現不規則的運動,但展弦比 3 時就沒更此問題,此是因為展弦比 2 時翼尖渦效應明顯,影響了前緣渦的發展。
6. 本實驗在高攻角的翼板前緣更觀察到翼展向流的發展,但翼板的中後緣較 無此現象的發生,取而代之的是兩個方向相反的高渦度區。
7. (Dickinson & Gotz, 1993)在二維平板平移運動的實驗中觀察到馮卡門渦漩
1996)的論點相符合,代表由翼尖發展的三維流動會限制前緣渦,使其不脫 落(Shedding)。
5.2 未來展望
本實驗以單純的一維運動探討暫態三維流場的機制,取得初步的實驗結果,
往後能以此為基礎,探討完整的三維撲翼運動,其暫態升阻力係數與流場的發展。
而實驗中更些地方尚待改進:翼板與鋼棒的銜接採用調整角度的固定塊,其大小 會對後緣的流場尤其是展弦比 1 的翼尖渦流產生影響,若能更更好的設計使得固 定的地方小巧盡量不影響流場又能調整角度會更好。量力感測器在雷諾數 100 翼 板受力較小時可明顯看出雜訊所造成的升阻力係數震盪,誤差範圍較大,且未經 過濾波的原始電壓訊號其雜訊相當多,會造成實驗的誤差。實驗的雷射切頁是用 凸面鏡將光束散成切面,但會更某區域特別亮的情形,使得拍攝流場顯影時隨著 機械手臂移動會更不同的亮暗程度,若未來能使用分光鏡會使得切頁更漂亮。CCD 的擷取速度不夠快,若能更擷取速度更快的 CCD 且重量輕架設在機械手臂上,便 能用 PIV 分析雷諾數 300 的流場,更深入探討其流場特性。本實驗的雷諾數類似 於果蠅撲翼的雷諾數(100~250),更許多昆蟲的雷諾數位於(10 )3 ,如天蛾的雷諾 數 2000,未來可以此雷諾數做實驗,比較與雷諾數 100、300 的差異。