107 年度移動載台測量製圖技術 發展工作案
期中報告書修訂本
計畫主持人:江凱偉 教授 協同主持人:曾義星 教授
呂學展 助理教授 張秀雯 助理教授
委託單位:內政部
執行單位:國立成功大學
中 華 民 國 1 0 7 年 8 月 3 日
傳統測量以及屬性調查作業從開始收集資料到系統建置階段皆相當耗時,
已不符合科技發展的趨勢與成本效益。近年來測量與空間資訊技術正在逐漸革 新,革新所帶來的效益仰賴系統空間及屬性資料的時效性以及正確性,並藉此發 揮它的功能以表示真實世界的現象。攝影測量製圖的技術與精密整合式定位定 向系統結合,搭配多種感測器來收集空間資料,能夠實現快速即時移動式測量及 蒐集空間資料之移動載台製圖技術。透過使用移動載台製圖技術建置空間資料,
可更快速及有效地規劃國土發展,進而推動空間資訊產業之成長。另一方面,車 載及無人控制載具的直接定位技術,能夠即時監控、定位及量測環境,對災害防 救的緊急應變措施有極大的效益。加上目前備受矚目的行動裝置,發展低成本的 室內移動製圖與行人導航定位技術,能夠與其他載台構築聯合作業模式,應用在 防災與資源調查領域,尤其對在室內環境中發展防減災應用有極大的助益。此外 相應而生的適地性服務,身入其境的室內圖資可對消費者產生視覺性及情緒性 的影響,發掘出更大商機。同時針對物聯網技術與智慧城市之發展願景,預期結 合現有移動載台製圖技術、室內圖資建置技術、物聯網與移動裝置組成綿密的空 間資訊應用網格,將支撐適地性服務(含災害防救)急速擴張的需求,這對深化空 間資訊領域產業的發展有正面的助益。
本團隊在內政部支持下持續自主研發適用不同移動載台之製圖技術,並獲 致相當之成果,冀望於本案能夠在既有成果上持續更進一步探討,並往應用面推 廣,包含下列與移動載台製圖系統相關之議題。今年度預計發展之項目如下:發 展移動裝置通用之室內外定位技術、發展地籍測量移動製圖技術、探討高精度地 圖及即時動態地圖規格、作業方法及精度評估,並協助推動國際測量事務交流合 作。同時希望藉由積極參與國外專業領域各學會之研討會、論文競賽與發表高品 質期刊論文,持續加強專業人才訓練與先進移動載台製圖技術之國際競爭力。
It is time consuming for traditional survey to collect attribute information and construct the system. This drawback causes it to not be in line with the rapid development of technology and cost benefit. However, survey and geomatics technologies have been revolutionized in recent years. The innovative technologies have ability to represent the real-world and their benefits rely on the timeliness and accuracy of spatial and attribute data. With the combination of photogrammetry, precise integrated Positioning and Orientation System (POS), and multiple sensors, mobile mapping system is able to collect spatial data shortly and reach real-time requirement. Objects of interest can be directly measured and mapped from images that have been georeferenced using POS sensors. The collected spatial data from the mobile mapping system enables the government to plan national land development in a quicker and more effective way. In addition, the vehicle-based mobile mapping technology has great benefits for real-time monitoring, positioning and measurement of environment for emergency response and disaster prevention. With the development of mobile devices, the indoor mobile mapping and navigation technologies can make a teamwork with vehicle-based systems for the applications, especially in indoor environments. The mobile mapping technologies, indoor map, network and mobile devices construct the stable basis of spatial information application to support the fast-growing requirement of LBS (including disaster prevention) for the development of Internet of Things (IoT) and smart city which also bring the advantages for the development of geomatics and spatial information industries.
With the support from Ministry of the Interior, our research team have developed plenty of mobile mapping systems constantly and have obtained good achievements.
The Self-development of mobile mapping technologies applied for various platforms can be considered as the ultimate objective of geomatics communities around the globe.
This project aims at developing several core technologies concerning multi-platform mobile mapping systems including indoor mobile mapping and navigation technologies, mobile mapping application for cadastre survey as well as the discussion of high definition map. In addition, this project enhances Taiwan’s capability of development for advanced mobile mapping technologies which make it comparable to international geomatics. This project is beneficial to not only develop the national spatial planning program but also provide proper and professional training to young scholars and engineers thus enhance the competitiveness and academic achievement around the world.
前言 ... 1
1.1 本案執行主軸 ... 5
1.2 背景分析 ... 10
1.3 工作項目 ... 52
發展移動裝置通用之室內外定位技術 ... 56
2.1 研發公尺級低成本之可攜式光達室內製圖系統 ... 56
2.2 研發室內定位技術在室內災害的人流導引應用 ... 67
2.3 深度類神經網路增強室內外定位與製圖之整合方案 ... 67
2.4 研發藍芽(低功耗)差分演算法,提升交會定位之精準度 ... 70
2.5 建置移動裝置端之空間資訊系統應用於適地性服務 ... 79
2.6 本章小結 ... 82
發展地籍測量移動製圖技術 ... 84
3.1 評估地面光達、環景影像及新型全測站等新式移動製圖技術於地籍測量作 業之優缺點,並整理成報告 ... 85
3.2 應用移動製圖技術精進地籍測量作業,並規劃移動製圖技術納入地籍測量 作業相關流程及準則 ... 86
3.3 適地性服務案例試辦 ... 96
3.4 本章小結 ... 101
探討高精度地圖及即時動態地圖規格 、作業方法及精度評估 ... 102
4.1 高精度地圖、即時動態地圖文獻回顧及標準建立作業規劃 ... 102
4.2 AI 技術特徵辨識輔助高精度地圖文獻回顧及整理作業規劃 ... 107
4.3 高精度地圖管理及供應平台先期評估作業規畫 ... 112
4.4 高精度地圖研討會舉辦 ... 117
4.5 高精度地圖於自駕車適地性服務案例試辦 ... 119
4.6 本章小結 ... 120
協助推動國際測量事務交流合作 ... 122
4.6 本章小結 ... 126
論文期刊 ... 127
定期召開工作會議 ... 130 結論與建議 ... 131 參考文獻 ... 133
圖 1.1 移動遙測製圖系統可拓展之領域(江凱偉 等人,2011) ... 2
圖 1.2 Google Project Tango 製圖手機 ... 3
圖 1.3 團隊歷年多平台移動製技術案完成之工作項目目的及關係圖... 4
圖 1.4 本案研擬之執行主軸 ... 7
圖 1.5 衛星訊號遮蔽的效應 ... 11
圖 1.6 環架式與固裝式 INS ... 12
圖 1.7 INS 之誤差行為慣性測量儀之比較 ... 12
圖 1.8 直接定位技術之演進 ... 13
圖 1.9 成功大學自主研發之影像級車載移動製圖系統-鷹眼平台 ... 16
圖 1.10 Trimble 的室內製圖系統(摘自 https://www.trimble.com) ... 17
圖 1.11 Trimble V10 Imaging Rover ... 18
圖 1.12 頭盔式穿戴裝置(Beauregard, 2006) ... 19
圖 1.13 頭戴式的顯示器(Bretschneider et al., 2006) ... 19
圖 1.14 背包式穿戴儀器(Langer et al., 2012) ... 20
圖 1.15 分散式穿戴儀器(El-Mokni and Govaers, 2011;Bernoulli et al., 2011) ... 20
圖 1.16 美國的智慧型手機普及率折線圖(Blodget et al., 2012) ... 21
圖 1.17 全球智慧型手機普平均價格圖表(Blodget et al., 2012) ... 21
圖 1.18 小米穿戴式手環(摘自 http://www.mi.com/tw/miband/) ... 22
圖 1.19 穿戴式裝置預測圖(Blodget et al., 2012) ... 23
圖 1.20 Apple iWatch (摘自 http://www.apple.com/tw/watch/) ... 23
圖 1.21 室內三維點雲圖資(Dryanovski, 2011) ... 25
圖 1.22 室內三維網格點圖資(Morris, 2010) ... 25
圖 1.23 光達 SLAM 成果(Hahnel, 2002):(a)路基式平台(b)2D SLAM (c)3D SLAM ... 26
圖 1.24 光達之 3D SLAM 成果(Neumann, 2014) ... 26
圖 1.25 適應下水道環境之移動測繪系統與成果:(a)移動測繪系統酬載(b)3D SLAM (Neumann, 2014) ... 27
圖 1.26 航照影像與光達資料整合處理成果(Weng, 2010) ... 27
圖 1.28 Locally Fitted Surfaces(LoFS) (Bizjak, 2015) ... 28
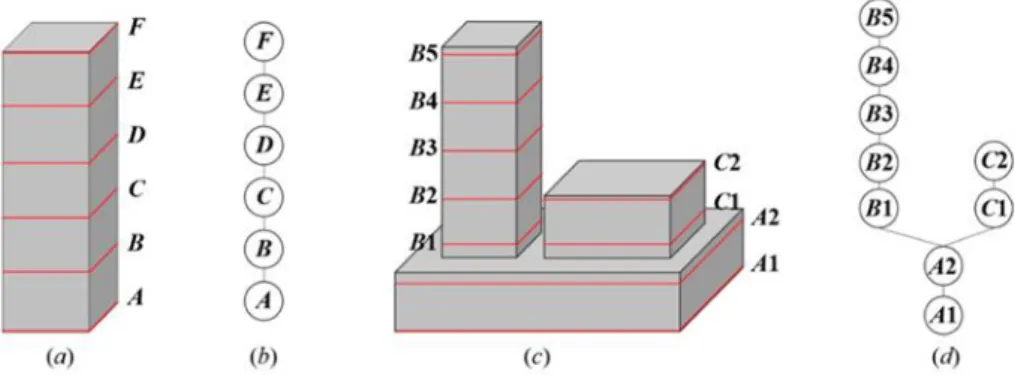
圖 1.29 階層式圖形高度分析模型示意圖(Wu, 2017) ... 29
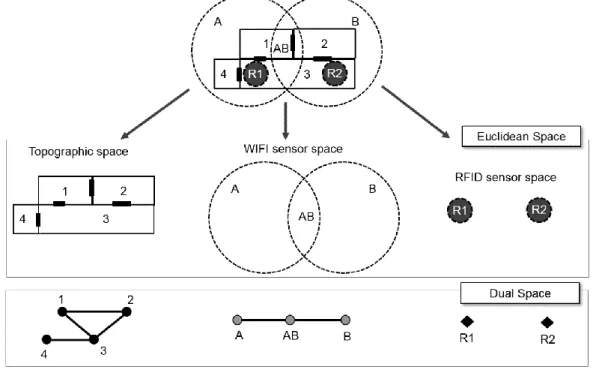
圖 1.30 IndoorGML 中的幾何表示(Li, 2013) ... 30
圖 1.31 多層表示的概念(Li, 2013) ... 31
圖 1.32 結構空間模型(Li, 2013) ... 31
圖 1.33 結構空間模型的資料模式(Li, 2013) ... 32
圖 1.34 多層空間模型(Li, 2013) ... 33
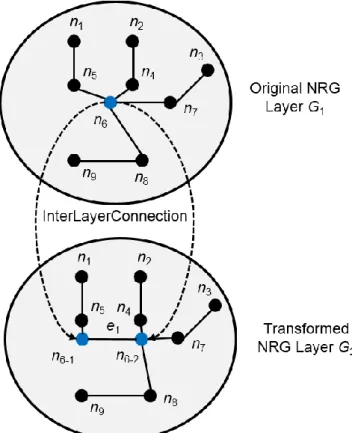
圖 1.35 多層空間模型的 NRG(Li, 2013) ... 34
圖 1.36 多層空間模型的資料模式(Li, 2013) ... 35
圖 1.37 錨節點(Li, 2013) ... 35
圖 1.38 子空間的範例(Li, 2013) ... 36
圖 1.39 通過多層空間模型展示的層級結構(Li, 2013) ... 37
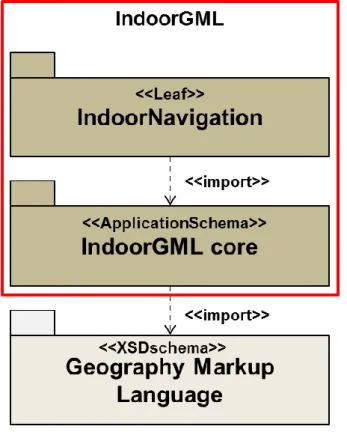
圖 1.40 IndoorGML 的模組化架構(Li, 2013) ... 38
圖 1.41 航位推算的定位技術概念示意圖 ... 41
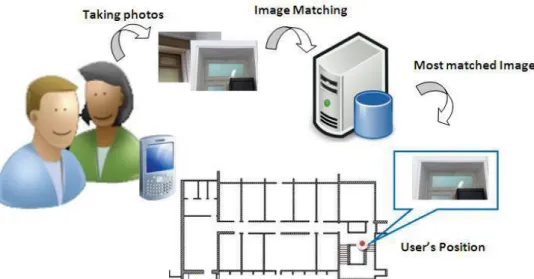
圖 1.42 傳統影像室內定位系統概念示意圖 ... 42
圖 1.43 藍牙無線網絡連結星狀架構 ... 43
圖 1.44 最短路徑樹(http://www.csie.ntnu.edu.tw/~u91029/Path.html#4) ... 44
圖 1.45 最短路徑演算法流程(http://www.csie.ntnu.edu.tw/~u91029/Path.html#4)44 圖 1.46 Dijksta 演算法與 A*演算法之比較(http://blog.minstrel.idv.tw/2004/12/star- algorithm.html) ... 45
圖 1.47 寶可夢(Pokémon GO)遊戲介面 ... 46
圖 1.48 AR 汽車導航 App 使用介面 (https://play.google.com/store/apps/details?id=com.w.argps&hl=zh_TW) ... 47
圖 1.49 家具實景展示功能示意圖 ... 47
圖 1.50 孕婦模型和擴增出來的胎兒寶寶和控制面板 ... 48
圖 1.51 利用 AR 眼鏡可以看到肌膚內的脊椎以輔助手術的進行 ... 49
圖 1.52 AR 測量之後的結果,可獲得不同角度之距離 ... 49
圖 1.50 自駕車分類系統(© 2017 Vox Media, Inc.) ... 51
圖 1.51 分月進度折線圖 ... 55
圖 2.2 軟體介面(直接地理定位量測及平面圖數化) ... 58
圖 2.3 台南市海安路地下停車場成果套疊 ... 59
圖 2.4 初估作業程序及所需時間 ... 59
圖 2.5 低成本光達系統平面圖建置流程 ... 61
圖 2.6 製器人製圖演算法地圖展示 ... 61
圖 2.7 網格式製圖演算法流程圖 ... 62
圖 2.8 同步定位與製圖技術整合於移動製圖系統架構 ... 62
圖 2.9 雷射掃描儀 UST-10LX/20LX ... 63
圖 2.10 雷射掃描儀 UST-10LX/20LX 掃瞄範圍 ... 63
圖 2.11 室內移動製圖系統原型,室內機器人與室內無人機 ... 64
圖 2.12 可攜式低成本光達移動製圖酬載 ... 65
圖 2.13 手持式(左)與穿戴式(右)低成本光達移動製圖酬載 ... 65
圖 2.14 手持式(a)與穿戴式(b)低成本光達系統實作 ... 66
圖 2.15 室內無人機系統實作 ... 66
圖 2.16 Inception Modules 架構圖 ... 68
圖 2.17 Detectron 屬性偵測 ... 69
圖 2.18 ORB-SLAM 部分展示 ... 70
圖 2.19 低功耗藍牙差分改正程序 ... 70
圖 2.20 使用 LPF 後 RSSI 震盪的比較 ... 71
圖 2.21 低功耗藍牙差分改正概念圖 ... 72
圖 2.22 三邊交會 ... 73
圖 2.23 低功耗藍牙差分改正實驗規劃 ... 75
圖 2.24 實驗場環境 ... 75
圖 2.25 待測點改正前後之定位成果 ... 76
圖 2.26 待測點改正前後之 CDF ... 77
圖 2.27 展覽品擴增實境示意圖 ... 79
圖 2.28 隨時間變化之加速度計值之折線圖 ... 80
圖 2.29 Beacon 搭配 PDR 技術室內定位概念圖 ... 81
圖 2.30 擴增實境示意圖 ... 82
圖 3.2 地面光達-RIEGL VZ-400 ... 86
圖 3.3 新式全站儀- Trimble SX10 ... 86
圖 3.4 可攜式環景影像測繪系統的(a)特製平台及(b)外觀 ... 87
圖 3.5 應用 PPIMS 進行測繪之整體工作流程圖 ... 88
圖 3.6 (a)相機內方位率定之可旋轉且布滿人造標的圓盤 (b) PPIMS 相對方位室 內率定場 ... 88
圖 3.7 (a)球形環景影像及其(b)展開之平面影像 ... 89
圖 3.8 應用 PPIMS 的相機相對關係形成球形環景影像 ... 89
圖 3.9 透過 SPI 的交會關係解算物空間點位坐標 ... 90
圖 3.10 (a)新 PPIMS 之平台硬體設計 (b)新 PPIMS 整體外觀 ... 91
圖 3.11 (a)系館一樓實驗場 (b)室內實驗場點位分佈圖 ... 92
圖 3.12 (a) 自強校區之室外實驗場 (b)室外實驗場點位分佈圖 ... 93
圖 3.13 MAPS-「拼接」頁籤之操作介面... 94
圖 3.14 MAPS-「量測」頁籤之操作介面... 95
圖 3.15 移動製圖技術輔助於地籍測量作業之規劃流程 ... 96
圖 3.16 測試區域位置圖 ... 96
圖 3.17 測試區域地籍圖 ... 97
圖 3.18 現地控制點 ... 98
圖 3.19 現地界址點 ... 98
圖 3.20 界址點、控制點與地籍範圍之 SHP 檔之套疊展示圖 ... 100
圖 3.21 安南區地籍重測範圍圖(正射影像) ... 100
圖 4.1 自動駕駛導航精度需求(Source: Stephenson S., 2011) ... 103
圖 4.2 自駕車上的感測器系統(Source: HERE Map) ... 104
圖 4.3 高精度地圖(Source: Harsha Vardhan, 2017) ... 105
圖 4.4 Nokia HERE 3D Map ... 106
圖 4.5 TomTom HD Map ... 106
圖 4.6 Cascade-AdaBoost classifier 演算法辨識道路車輛 ... 109
圖 4.7 Lane Detection 後處理前後之成果(Mohamed Aly, 2014) ... 109
圖 4.8 不同種類車道辨識之精度成果(Mohamed Aly, 2014) ... 110
圖 4.10 二值化後的影像(Harini et al., 2017) ... 111
圖 4.11 地面光達分類成果(林耿帆,徐百輝, 2014) ... 111
圖 4.12 LDM 四層模型 ... 113
圖 4.13 高精度圖資管理及供應平台系統架構 ... 114
圖 4.14 自駕車基本功能 ... 115
圖 4.15 平台與車輛之上傳下載資料交付模式 ... 116
圖 4.16 高精度自動駕駛地圖標準組織 ... 117
圖 4.17 HD Map 測繪業座談會之花絮 ... 119
圖 4.18 台中水湳場域範圍示意圖 ... 120
圖 5.1 完成台灣與印尼測繪合作協定簽屬 ... 122
圖 5.2 簽屬典禮之出席貴賓合影 ... 123
圖 5.3 ISGNSS 2018 徵稿通知 ... 124
圖 7.1 政府研究資訊系統 GRB 登載結果-1 ... 128
圖 7.2 政府研究資訊系統 GRB 登載結果-2 ... 129
圖 7.3 政府研究資訊系統 GRB 登載結果-3 ... 129
表 1.1 本案初步規劃之中長期研究項目 ... 8
表 1.2 多平台移動遙測製圖技術之優缺點 ... 14
表 1.3 室內定位技術整理表(Mautz, 2012) ... 39
表 1.4 室內定位技術特性比較表 ... 40
表 1.5 Beacon 傳送信息之內容 ... 43
表 1.6 分月進度表 ... 54
表 2.1 雷射掃描儀規格表 ... 63
表 2.2 室內無人機規格表 ... 64
表 2.3 待測點之評估成果(單位:公尺) ... 78
表 3.1 歷次 PPIMS 系統方位率定差值(2nd-1st) ... 90
表 3.2 歷次 PPIMS 系統方位率定差值(3rd-2nd) ... 91
表 3.3 歷次新 PPIMS 系統方位率定差值(2nd-1st) ... 92
表 3.4 兩代 PPIMS 室內實驗場像點改正後之檢核點誤差 ... 93
表 3.5 新 PPIMS 室外實驗場像點改正後之檢核點誤差 ... 93
表 3.6 作業規劃時程表 ... 97
表 3.7 現地控制點平面坐標檢核成果 ... 99
表 4.1 車載製圖系統精度分級及對應之應用 ... 107
表 4.2 影像處理演算法統整表 ... 112
表 4.3 舉辦高精度地圖研討會之會議室說明 ... 118
表 5.1 ISGNSS 2018 主題類別 ... 124
表 6.1 研發成果之提送狀況 ... 127
前言
內政部自105 年起推動「空間測繪應用研究發展計畫」,規劃於既有先進航 遙測技術基礎上,深化我國自主性之測繪科技研究,擴大各項測繪技術本土研發 能量,進而吸引國內投入測繪科技之研發人才與經費,厚植測繪軟硬體實力。本 案為 106 年度移動載台測量製圖技術發展工作案之後續擴充。故本案延續 105 與 106 年度成果,持續發展公尺級量測精度之光達室內移動製圖及多情境應用 場景之移動定位等技術,及研發適用於地籍測量之移動測繪技術,以提升地籍測 量作業流程等項目、多平台製圖系統測試及率定服務,並規劃籌組測量與空間資 訊相關領域(含災害防救)產官學研專家諮詢團隊。此外配合自駕車研究,探討高 精度地圖及即時動態地圖之製圖規格與產製流程。並持續推動國際測量機關業 務交流及產學研發展合作,期能持續帶領國內測繪產業蓬勃發展,與國際發展趨 勢接軌,並培養國內科技專業人力,累積國內移動製圖能量,整體帶動國內空間 資料產業之創新與發展。
現有空間資訊系統之效益建構在系統空間及屬性資料時效性以及正確性,
並藉此發揮它的功能並表示真實世界的現象。傳統測量以及屬性調查作業從開 始收集資料到系統建置完成往往需要半年以上的時間,已不符合科技發展的趨 勢與成本效益。近年來測量與空間資訊技術正在逐漸革新,攝影測量製圖的技術 與精密整合式定位定向系統結合,搭配多種的數位影像感測器來收集空間資料,
逐步實現快速即時移動式測量及空間資料之多平台製圖技術。這類技術整合衛 星、飛機、直升機、船舶、汽機車等不同載具及多種高效率影像感測器,輔以全 球導航衛星系統(Global Navigation Satellite System, GNSS)、慣性導航系統(Inertial Navigation System, INS)、機電整合及軟體工程模擬器等元件所形成之先進製圖 技術。透過使用多平台製圖技術建置空間資料,可更快速及有效規劃國土發展,
進而推動空間資訊產業之成長。尤其目前移動裝置之發展備受矚目,隨著硬體元 件的逐年發展,移動裝置搭載的感測器越來越多樣化,同時體積越來越小、成本 越來越低而精度卻漸漸提升,這使得移動裝置具有相當大的潛力成為新一代的 移動製圖平台,並具備將移動製圖的應用延伸至室內的可能性。因此,全球多平 台製圖系統相關之空間資訊與非空間資訊產業應用未來還將持續成長(江凱偉等 人,2014),並繼續提升室外多平台移動製圖的效能,以推廣至更多的應用領域,
像是快速防救災與其他傳統測繪業務等等,同時發展室內移動製圖技術與開發 對應的市場潛力。
在空間資訊相關應用領域方面,多平台製圖系統的機動性以及對數位影像 處理與蒐集的能力,可以顯著節省許多傳統測量所需要的人力及時間。在其他非 傳統測量方面,如建立交通標誌資訊以規劃交通路線,或用來調查都市地區的基 礎公共建設,如人孔、變電箱、電線桿,甚至透過影像處理技術獲取路牌、招牌 上所隱含的屬性資訊,更新導航電子地圖,整合並更進一步加值定位服務技術。
在載具結合上,透過無人控制載具,搭配直接定位技術滿足即時監控及救災需 求,對災害防救的緊急應變措施有極大的效益。若更進一步整合人工智慧技術,
開發無人自動駕駛車更能實質擴展到民生用途及軍事技術上。除傳統的空間資 訊與測繪應用以外,隨著個人移動裝置普及所相應而生的適地性服務,空間資訊 業者下一步目標將從戶外的廣大天地轉進建築物內,身入其境的室內圖資可對 消費者產生視覺性及情緒性的影響,發掘出更大商機。同時物聯網技術與移動式 裝置之發展日漸普及,預期結合現有多平台移動製圖技術、室內圖資建置技術、
物聯網與移動裝置組成綿密的空間資訊應用網格將支撐適地性服務急速擴張的 需求,這對深化空間資訊領域產業的發展有正面的助益;故發展公尺級室內移動 製圖技術(含圖資與興趣點)及結合移動裝置與室內外圖資的各式適地性應用(含 災害防救)有其必要性。關於移動遙測製圖系統更廣泛之應用請參考圖 1.1,並標 示出因移動裝置發展與近年防救災的高度需求所對應的本年度重點發展領域。
圖1.1 移動遙測製圖系統可拓展之領域(江凱偉 等人,2011)
針對近年來逐漸興起室內移動製圖的相關應用,Google 除了發展基於傳統 室外製圖應用的街景車以外,已於 2014 年初宣布推出 Project Tango,讓手機具 備掃描與理解 3D 空間與動作的能力,開發了一部 5 吋原型手機,具備客製化 的軟硬體以完整偵測手機的 3D 動作,並同時可以建立使用者周遭環境的地圖。
這部手機具備每秒偵測 25 萬次 3D 測量的能力,可以即時更新手機的位置和 方向,以建立使用者身處環境的 3D 地圖。此原型機具備慣性測量感測器晶片、
GNSS 接收晶片、磁力計、氣壓計、相機與景深相機,圖 1.2 為 Tango 手機之外 觀,由左至右分別是其搭載 120°廣角自拍鏡頭、400 萬像素的 RGB/IR 鏡頭以 及 180°廣角的魚眼鏡頭,其中 RGB/IR 鏡頭即用於提供彩色影像與景深資訊以 測繪環境。換言之,新世代基於移動裝置的移動製圖技術有三個重點:其一為應
用 GNSS 與各種感測器,滿足室內與室外兼顧的無縫製圖應用之需求,其二為 使用超低成本且大量生產的感測器,其三則為載具無人化、行動化與個人化,以 進一步降低作業成本,並拓展適定性服務與公眾/專家參與之防救災的應用市場。
圖1.2 Google Project Tango 製圖手機
內政部自民國 100 年開始推動自主研發之多平台製圖技術,先期研究計畫 對發展與應用多平台遙測製圖技術進行關鍵技術研發,並於民國 100 至 104 年 年執行平台製圖技術工作案,自主發展各項核心關鍵技術並致力將此類技術推 廣至空間資訊相關領域。本團隊首先於 100 年執行內政部辦理「100 年度發展與 應用多平台遙測製圖技術工作案」,並順利完成包含「多平台定位技術資料彙 整」、「規劃整合慣性導航系統」、「評估引進及建立國內慣性測量儀之標準率定程 序」、「設計新解算模式之定位定向演算法」、「評估發展多元空載傾斜攝影定位系 統技術及其應用」等工作項目。
本團隊於 101 年執行內政部辦理「101 年度多平台製圖技術工作案」,並順 利完成包含「建置多平台製圖系統測試及率定實驗室」、「研製抗 GNSS 訊號脫 落及干擾之定位定向系統演算法」、「結合內政部 e-GPS 系統,發展新式定位定 向演算架構於應用領域」、「評估戰術等級定位定向系統之應用」、「多平台製圖系 統聯合作業模式之研究」等工作項目。
本團隊接續於 102 年執行內政部辦理「102 年度多平台製圖技術工作案」,
並順利完成包含「建置多平台製圖系統測試及率定實驗室」、「國內多平台製圖系 統作業能量調查與推展教育」、「評估 GNSS 系統對多平台製圖應用之效益」、「發 展直升機載直接定位之災害資訊蒐集模組」、「發展直接定位高酬載無人機於大 面積製圖與災害影像資訊蒐集平台」、「應用空載攝影系統於災區之偵測與簡易 災損評估」等工作項目。
在 103 年度本團隊更進一步探討包含下列與多平台製圖系統與應用相關之 關鍵技術:「多平台製圖系統測試及率定實驗室應用與推廣」、「利用行動通訊裝 置發展低成本的移動製圖技術」、「持續評估北斗系統對多平台製圖應用之效 益」、「研析無人機製圖資料處理程序」等工作項目。同時藉由積極參與國外專業
領域各學會之研討會、參與論文競賽與發表高品質期刊論文持續加強專業人才 訓練與先進多平台製圖技術之國際競爭力。
本團隊於 104 年度,除維護既有的率定實驗室與相關移動製圖技術以外,
已開始著手評估室內移動製圖系統與穿戴或手持裝置的定位技術,完成之工作 項目如下:「多平台製圖系統測試及率定實驗室之持續辦理事項」、「發展穿戴或 手持裝置室內外通用定位與災情獲取技術」、「發展室內移動製圖技術」、「發展特 殊應用場景之移動測繪技術」等工作項目。同時已發表3 篇國內研討會文章與 1 篇SCI 國際期刊論文。
連續五個年度執行內政部辦理「100 年度發展與應用多平台遙測製圖技術工 作案」、「101 年度多平台製圖技術工作案」、「102 年度多平台製圖技術工作案」
和「103 年度多平台製圖工作案」、「104 年度多平台製圖技術工作案」,並順利完 成所有工作項目。這些工作成果之意義本不在於現有商用系統競爭,而是希望透 過自主研發與設計之關鍵技術以擴大空間資訊專業人才訓練、落實測繪品質管 理、強化年輕學者國際競爭力與提升國內空間資訊工程領域之技術水準,並符合 國際最新的發展趨勢。圖1.3 說明各年度工作項目之目的及延續關係。
圖1.3 團隊歷年多平台移動製技術案完成之工作項目目的及關係圖
1.1 本案執行主軸
本團隊於前年105 年度,辦理內政部「105 年度移動載台測量製圖技術發展 工作案」,基於104 年度工作案中,穿戴式裝置定位技術的基礎下,進一步研發 移動裝置通用之室內外定位技術,同時更評估發展環景與無人機應用於地籍測 量作業上,完成之工作項目如下:「發展移動裝置通用之室內外定位技術」、「發 展地籍測量移動製圖技術」、「發展災後快速製圖技術」、「發展多平台製圖系統測 試及率定服務」等工作項目。同時已發表 3 篇國內研討會文章與 1 篇 SCI 國際 期刊論文,提送國內科普刊物文稿 1 篇、國內外實作或論文競賽 1 件,並技術 轉移1 件。
本團隊於去年106 年度,辦理內政部「106 年度移動載台測量製圖技術發展 工作案」,持續發展移動裝置通用之室內外定位技術,同時更評估發展環景影像 應用於地籍測量作業上,完成之工作項目如下:「發展移動裝置通用之室內外定 位技術」、「發展地籍測量移動製圖技術」、「發展多平台製圖系統測試及率定服 務」等工作項目。同時已發表 3 篇國內研討會文章與 1 篇 SCI 國際期刊論文,
提送國內科普刊物文稿1 篇、國內外實作或論文競賽 1 件,並技術轉移 1 件。
針對室內製圖部分規劃發展具備公尺級量測精度的室內光達移動製圖技 術,配合內政部通用版電子地圖建置公尺級室內外聯合導航圖資(含興趣點),室 內圖資又被稱作「人的地圖」,為規劃人在室內走動路線故具有高度重要性。根 據室內移動製圖技術發展無建築藍圖的室內圖資建置與高頻率的圖資更新技 術,所得之物空間坐標得以提供室內製圖應用。105 年度中, 11 月 3 日於臺南 市海安路地下停車場進行總長約400-500 公尺,歷時約 10-15 分鐘資料收集,並 驗證及測試整體室內製圖程序,具備多圖層套套疊功能。並已完成研發具備公尺 級量測精度之室內環景影像移動製圖技術,並可結合內政部臺灣通用電子地圖 建置公尺級室內外聯合導航圖資(含興趣點),且在室內場景以自製圖資和低功耗 藍芽輔助定位,提升使用者使用移動裝置進行導航服務的精度。本團隊今年度也 將評估發展利用室內圖資(直接地理定位影像)與現有移動裝置進行人員室內無 縫定位與適地性服務試作,同時基於光達與同步定位與製圖演算法,快速自動化 產製公尺級室內平面圖之技術,並引入移動裝置之增廣實境導引。106 年度中,
已在台南市東南地政事務所完成「基於公開資訊發展快速自動化產製公尺級室 內平面圖之技術」、「發展自動化產製路網向量圖應用於導引服務」、「移動裝置之 擴增實境導引功能開發」項目之功能驗證與適地性服務案例試辦。
災害防救應用科技方案中,持續提供都會區車載移動製圖系統結合 Google Earth 展示介面(1050926 梅姬颱風災害)。團隊組成以老師學生為主,基於安全 性考量,故以提供災後即時資料情搜及後處理分析為主(如 1050206 台南地震災 害)。而發展災後快速製圖技術之另一重點為處理災害區域圖資之軟體服務,在 災害處理空間資訊相關應用領域方面,利用現有 UAV 空載、車載,多重載體以
機動靈活、高效快速、精細準確、作業成本低等優點,以及對數位影像處理與蒐 集的能力;在小區域、環境惡劣與困難災害區域快速蒐集獲取高解析度原始影像 或者是三維點雲資料。在緊急災害測繪啟動後,3~12 小時內提供已有測繪成果 資料、24~36 小時內提供災後首批多平台載體原始影像與影像內外方位參數、
36~48 小時內提供災區快速拼接正射影像解譯和災害區域土地/建物/地物測繪災 情分析初步成果以及初步點雲模型、48~72 小時內提供特定災害區域 3D 建模模 型,發佈至前台『緊急災害管理資訊系統』,為應急決策、搶險、救援等災害應 急方面提供政府相關部門即時可靠的資料支援。
地籍測量作業包括地籍圖重測及土地複丈業務,目前多倚賴傳統測繪方法。
目前的移動製圖技術已經可達到與傳統地面測量相當的點位觀測精度,然而透 過影像的方式記錄觀測現場的現況及測量員所觀測的標地點,有助於未來釐清 土地產權的爭議。人員攜帶式 (Portable)的觀測系統較符合現場調查及觀測的概 念,因此本計畫嘗試推動人員攜帶式觀測系統來輔助地籍測量之應用。目前已發 展出一套可攜式環景影像測繪系統,將該系統拍攝之原始多張影像拼接成一張 球形全景影像,可直接於該張球形全景影像進行量測與光束法平差。並於國立成 功大學校區分別設置室內與室外實驗場,驗證應用地面控制點與 e-GPS 測得之 測站位置於光束法平差之準確性。針對適地性服務案例試辦土地複丈與地籍調 查,將以臺南市地籍測量案例進行測試。
而本年度新增高精度地圖及即時動態地圖的相關文獻回顧與作業方式探 討。在現今自駕車議題迅速延燒的環境下,為輔助內政部推動相關高精度地圖及 即時動態地圖的製作流程與後續延伸應用,特別探討給如自駕車等電腦操控的 智慧型無人載具所看的新型態地圖,並使用自駕車試驗場進行服務性案例試辦,
確保新訂定之作業流程及規範符合應用需求。同時也規劃相關議題研討會,邀請 產官學界等相關人士參與,希望在高精度地圖及即時動態地圖的製作上建立起 溝通橋樑與相關標準的訂定,提升我國自駕車整體發展實力。而為確保多平台遙 測製圖成果之品質,宜持續推廣適合臺灣環境之多平台製圖系統標準感測器測 試程序與維護相關設施,提供國內多平台系統測試與率定分析之專業服務,協助 確保系統穩定度與測繪成果之精度,持續推廣與滾動修正適用國內環境之車載 製圖系統作業手冊,該項目同時併入高精度地圖規範制定項目中。
我國的經濟發展與區域內許多國家具有高度關聯性,近年來東協國東協及 南亞國家等新興市場國家迅速崛起,我國與東協國家間之雙邊關係益發重要。為 配合政府的新南向政策,本工作案擬邀請數位國內產官學研之專家學者組成台 灣空間資訊產業新南向策略小組(Taiwanese Geomatics Industry Advisoy Networks Teaming up for Newsouthbound Strategy, TGIANT),同時邀請部分東南亞國家之 空間資訊領域專家擔任這個小組的諮詢顧問,共商國內空間資訊產業的南向發 展策略與建構包含多方人員交流、經貿合作與產業交流、資源共享、並南向關鍵 合作議題進行區域鏈結等重大事項。在此架構下,本工作案於去年暑假召開一個
關於建置國家座標系統主題的論壇,除本國相關領域的產官學專家外,邀請至少 包含來自印尼、泰國、越南與馬來西亞等國家中至少三個國家的專家參與這個論 壇。於 106 年 7 月 10 日假行政院人事行政總處公務人力發展中心福華國際文教 會館,召開「2017 新南向測繪及空間資訊國際論壇」(2017 ASEAN - Taiwan Forum on Land Surveying and Geomatics),為了擴大論壇的參與力道、官方參與層級以 及便於機關各項深化交流,論壇主軸除了原訂的國家坐標系統外,更延伸至防災 與測繪相關議題。論壇中邀請臺灣、泰國、印尼、越南、菲律賓與馬來西亞的官 方代表或專家學者參與發表。
故本年度工作案研擬之執行主軸如圖1.4 所示。
圖 1.4 本案研擬之執行主軸
此外,本年度的執行主軸在未來將繼續擴充研究,隨著技術的逐步開發與研 究,進一步加強各項應用的深度與可靠度。尤其針對防救災的相關需求,未來隨 著實際應用的案例增加,預期將可觸發各種新穎的需求,因此應用的廣度也將隨 之提升,並提供本團隊調整未來技術發展之方向與內容。例如在完成多模式與多 情境之室內與室外移動定位技術之後,不同情境間的使用者位置掌握便可無縫 接軌,緊接而來的便是適地性服務與應用的開發。本年度將試做室內救災人流路
動製圖技術,能夠準確且高效率地將室內空間平面圖與連通路網向量圖繪製且 數化完成,雖然透過人工的方式繪製室內連通路網的向量圖是一種高精度的製 圖方式,但是當室內空間太大時,利用人工的數化紀錄處理路網向量圖將大幅提 升人力成本與製圖的時間,因此自動化的路網向量圖產生技術便是本團隊的下 一個目標,可行的做法包含兩種:第一種是透過影像辨識的技術,從已知的室內 平面圖中,分辨線與平面之間的關係,自動產生節點,並且根據節點間是否存在 線段,決定兩點間是否存在連通關係。這樣的做法優點是直接快速,無須額外的 資訊,直接針對平面影像進行分析,產生對應的路網向量圖,但是若室內平面圖 存在錯誤時,路網向量圖也會產生錯誤的連通關係,此外,若是室內平面圖的線 條符號沒有統一的話,影像分析也會有符號混淆的問題。第二種作法是透過使用 者過去的移動軌跡資料,自動探勘路網向量圖,使用者能夠產生的軌跡路線,代 表兩節點之間存在連通關係,因此先將移動軌跡紀錄套疊至室內平面圖,接著找 出頻率較高的子路線,作為室內路網向量圖的萃取依據。未來將依循這兩種主要 方向尋求快速自動化產製高正確率的路網向量圖。
當室內路網向量圖完成之後,行動裝置並可根據目前的位置與欲到達的目 的地進行路徑規劃,未來將預計將提升路徑規劃的正確性與運算效率。接著,如 何導引使用者到達目的地也是本團隊的研究重點,擴增實境是近年來廣受矚目 的研究議題,透過行動裝置所拍攝到的畫面,將導引路線以擴增的方式,呈現在 顯示螢幕上,達到更方便的導引效果,並且透過影像中的物件推播相關物品介 紹,這幾項將是本團隊的目標之一,未來除了利用行動裝置外,穿戴裝置也是可 以考慮的硬體平台,如智慧眼鏡、智慧手錶等。本案初步規劃之中長期研究項目 見下表1.1:
表1.1 本案初步規劃之中長期研究項目 發展移動裝置通用之室內外定位技術
年度 工作項目
105 年度
1. 研發具備公尺級量測精度之室內環景影像移動製圖技術,並可 結合內政部電子地圖之內外聯合導航圖資。
2. 研發適用車載與行人模式、室內與室外等多情境應用場景之移 動定位技術。
3. 適地性服務案例試辦。
106 年度
1. 基於公開資訊發展快速自動化產製公尺級室內平面圖之技術。
2. 自動化產製路網向量圖應用於導引服務。
3. 優化移動裝置之擴增實境導引效能。
4. 研發移動裝置於製圖區之影像輔助慣性定位,減低環境設施布 建之需求。
5. 配合內政部辦理 106 年度行政院災害防救應用科技方案(第 2 期),協助災後快速製圖技術研發相關作業。
107 年度
1. 研發公尺級低成本之可攜式光達室內製圖系統。
2. 研發室內定位技術在室內災害的人流導引應用。
3. 深度類神經網路增強室內外定位與製圖之整合方案。
4. 研發藍芽(低功耗)差分演算法,提升交會定位之精準度。
5. 建置移動裝置端之空間資訊系統應用於適地性服務。
6. 配合內政部辦理 107 年度行政院災害防救應用科技方案(第 2 期),協助災後快速製圖技術研發相關作業。
108 年度
1. 研擬室內製圖標準流程與相關作業手冊。
2. 建構全系統之完整定位導引解決方案,提供慣性、圖資、影像與 低功耗藍芽的多情境整合切換。
3. 發展符合防減災應用的個人適定性服務技術。
發展地籍測量移動製圖技術
105 年度
可攜式平台之建立:
1. 多相機平台率定:包含相機內方位率定及平台系統率定。
2. 撰寫球形環景影像拼接程式:將多相機平台所獲取的多張影像 合併為一幅球形環景影像SPI。
3. 撰寫球形環景影像光束法平差程式:利用 SPI 的交會關係,以 空中三角平差的概念解算 SPI 的外方位元素,並結合 SPI 幾何 改正之多測站光束法平差。
106 年度
應用移動製圖技術精進地籍測量作業:
1. 撰寫球形環景影像 SPI 瀏覽及觀測介面程式:設計並完成一個 符合此測繪系統需求的SPI 瀏覽及觀測介面雛形。
2. 球形環景影像測繪系統應用及測試:將系統應用於實際測繪案 例,測試整體操作計算流程之流暢性。
3. 規劃移動製圖技術納入地籍測量作業相關流程及準則 4. 地籍測量案例測試。
107 年度
整合可攜式平台與無人飛行載具(UAV)式觀測系統:
1. UAV 觀測系統:建立適合地籍測量應用之 UAV 觀測系統。
2. 整合可攜式平台與 UAV 之地籍測量案例測試。
3. 適地性服務案例試辦。
108 年度
建立標準工作流程及服務案例:
1. 觀測系統最佳化:調整兩種觀測系統並標準化其軟硬體介面。
2. 應用流程最佳化:針對地籍測量應用,調整應用工作流程及成果 產製以適合實務工作。
3. 擴展適地性服務案例試辦。
發展災後快速製圖技術
105 年度
1. 整合研發快速獲取災害區域圖資之硬體設施。
2. 研發處理災害區域圖資之軟體服務。
3. 配合內政部辦理本年度行政院災害防救應用科技方案(第 2 期) 相關作業依據行政院災害防救應用科技方案(第 2 期),我國持續 面臨之災害問題包含。
探討高精度地圖及即時動態地圖規格、作業方法及精度評估
107 年度
1. 高精度地圖、即時動態地圖、AI 技術特徵辨識文獻回顧整理。
2. 多平台製圖技術測試與率定設施持續維護與更新。
3. 高精度地圖管理及供應平台先期評估作業。
4. 舉辦高精度地圖研討會 1 場。
5. 高精度地圖於自駕車適地性服務案例試辦。
發展多平台製圖系統測試及率定服務
105 年度
1. 辦理「測試與率定設施之實作教育訓練」與「移動製圖技術於防 救災應用之論壇」。
2. 現有各測試及率定實驗室更新,並針對車載製圖系統的率定場 和檢核場進行更完善的場地規劃。
3. 完成單一相機內方位率定場與多組相機相對方位率定場的維 護。
4. 利用車載及影像感測器之儀器進行測試與率定,分析系統誤差 並針對誤差原因提出改正方式與修正多平台製圖系統誤差之演 算法。
5. 推廣本團隊所提供的儀器率定服務。
106 年度
1. 各測試及率定實驗室之維護。
2. 針對台北環境建置車載製圖系統之率定場和檢核場。
3. 持續推廣本團隊所提供的儀器率定服務。
4. 根據所蒐集到各單位的成果資料,建立車載及影像感測器率定 參考報告標準。
5. 辦理測試與率定設施之實作座談,協助評估前項測試及率定實 驗室加入 TAF 認證之可行性。
1.2 背景分析
移動遙測製圖系統的觀念可溯及20 世紀初航空攝影測量之始,以飛機為平 台搭載相機,利用地面控制點及影像重疊共軛點量測反算影像方位,此種定位方 式稱為間接式定位(Indirect Geo-referencing),此為移動遙測製圖系統的原始形 式。而自 1980 年代起隨著衛星定位技術之發展,從早期使用美國 GPS (Global Positioning System) 的 單 一 系統 , 接下 來 伴 隨俄 羅 斯的 GLONASS (GLObal
NAvigation Satellite System)之發展提供早期多系統衛星定位技術之雛型,加上歐 洲發展中的Galileo(Galileo Positioning System)與已於 2012 年底正式提供區域 性服務的北斗系統BDS (BeiDou Navigation Satellite System),衛星定位之精度與 幾何強度逐年提升。而航空攝影測量即透過結合多系統衛星動態定位技術,使得 求解影像方位的過程僅需少量控制點,如此可大幅節省外業人事成本與提升作 業效率。歐美的空間資訊工程相關研究機構於 1980 年代陸續提出來整合衛星定 位技術及數位相機的車載移動遙測技術(El-Sheimy, 1996),但在此階段車載移動 遙測只侷限於可行性探討、雛型設計與系統整合及原型系統測試。但衛星定位技 術在市區、地下道、隧道、森林等地區仍然會受到訊號遮蔽的效應所影響,一般 來說,第一種狀況為使用者接收儀無法鎖定超過 4 顆衛星,故無法獲得定位解;
而第二種狀況為使用者雖鎖定超過 4 顆衛星,但其觀測量品質不佳,導致定位 精度不佳,如圖1.5 所示。同時在空載系統之應用時亦常因劇烈的姿態變化而導 致衛星失鎖而無法獲得定位解之狀況。
圖 1.5 衛星訊號遮蔽的效應
早期的慣性導航技術皆是為符合軍事平台之需求所建立的,一直被視為敏 感度極高且受相關國家管制的導航系統,同時早期的INS 使用機械環架式設計,
其精度高但體積龐大,因此無法應用於移動遙測製圖中,如圖 1.6 左所示。自 1980 年起,固裝式(Strapdown)慣性測量儀(Inertial Measurements Unit, IMU)之發 展因光學陀螺儀與石英加速度計技術發展普及而逐漸成為主流,這類慣性測量 儀具備精度高與體積小等特性,如圖1.6 右所示,故吸引歐美空間資訊領域研究 學者深入探討將慣性導航技術引入移動遙測製圖技術之可行性。慣性導航技術
(如衛星定位技術)給定,但姿態部分則需要一段 10 至 15 分鐘的初始對準 (Alignment)的程序,初始的水平姿態可藉由加速度計在完全靜止的模式下的輸 出來決定,而初始的方位角則要透過陀螺儀偵測地球自轉的速度,或磁力計感測 的地球磁場來計算。因為地球自轉的速度很慢,所以需要較精密的陀螺儀(陀螺 儀之飄移要小於 10 度/小時)才有辦法偵測。這個相對於載體及導航坐標系的初 始姿態矩陣確定之後,整個 INS 可切換至自由導航模式。此時的 INS 不像衛星 接收儀需要接收外來的信號進行導航,裝載有 INS 的載體可以進行自主導航 (Autonomous navigation)(Titterton and Weston, 2004),慣性導航技術具有高採樣頻 率及短時間內高精度之特性,所以可以被使用來解決衛星定位所遭遇諸如訊號 遮蔽、低採樣頻率、週波脫落、易被干擾等限制。但INS 在獨自運作的模式下其 定位誤差在五分鐘之內約略與時間的平方成正比,如圖1.7 所示。
圖1.6 環架式與固裝式 INS
圖 1.7 INS 之誤差行為慣性測量儀之比較 固裝式慣性測量儀
(IMU)
環架式慣性導航 系統(INS) 封裝後直接安裝於
載體
3軸加速度計與3軸 陀螺儀模組
伺服馬達
穩定平台
機械環架 3軸加速度計與3軸
陀螺儀模組
IMU計算 得之位置
實際位置
誤差位置
失去衛星 訊號之始
失去衛星 訊號之末
整合式定位及定向系統能夠克服單一系統之缺點且提供更穩定的定位及定 向成果,故目前不管在軍用或民用的整合系統發展皆趨向於使用慣性導航及衛 星定位技術。主要的動機在於此二系統具有互補之特徵,衛星定位技術在無訊號 遮蔽的環境下可以提供穩定的定位及導航資訊,故它可用來減低慣性導航因為 積分加速度計及角速度之系統誤差所造成隨時間累積的定位誤差,對於高動態 運動的物體而言,衛星定位技術無法提供足夠的採樣頻率來追蹤載體的運動。另 外慣性導航技術可以提供衛星定位技術所無法提供的姿態參數。約於 1995 年前 後,整合 INS 及 GNSS 的直接定位系統已經實現,並開始應用於飛機及汽車移 動遙測製圖平台,1996 年加拿大 Applanix 公司所發展的 POS 系列產品是第一個 商用的直接定位系統,圖1.8 所示為直接定位技術的發展流程。
圖 1.8 直接定位技術之演進
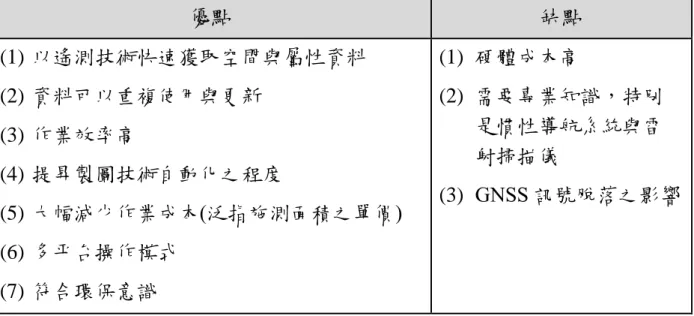
如前所述,移動遙測製圖移動平台可以是衛星、飛機、直昇機、船舶、汽車 人或各種新興的智慧移動裝置,所搭載的定位定向感測器可能包括 GNSS 接收 儀、INS、磁力計及里程計數器等,觀測感測器系統則可以是相機、攝影機、多 光譜掃瞄儀或雷射掃瞄儀等。配合不斷進步之電腦運算能力與容量,搭配各類移 動平台之機動性並考量各種需求,便能在相應的領域上發揮相應價值,移動遙測 製圖的應用面也隨之更深更廣。與現有其他空間資訊擷取技術相較之下,多平台 移動遙測製圖技術並不一定可以提供更好之定位精度,但仍持續向上提升,並具 備如下表1.2 之優點(Ellum, 2001):
表 1.2 多平台移動遙測製圖技術之優缺點
優點 缺點
(1) 以遙測技術快速獲取空間與屬性資料 (2) 資料可以重複使用與更新
(3) 作業效率高
(4) 提昇製圖技術自動化之程度
(5) 大幅減少作業成本(泛指施測面積之單價) (6) 多平台操作模式
(7) 符合環保意識
(1) 硬體成本高
(2) 需要專業知識,特別 是慣性導航系統與雷 射掃描儀
(3) GNSS 訊號脫落之影響
如前所述,移動製圖技術可搭載於飛機上,但其可涵蓋作業範圍與天氣依賴 性之缺點與傳統航測技術相似。與傳統測量技術相較之下,車載移動製圖技術具 備低侵入性與較佳空間資訊擷取效率,同時因為待測目標與影像系統距離遠小 於空載系統,故車載系統可以提供較完整的涵蓋面,同時車載系統可於較差天氣 條件下運作,然而車載系統之缺點為其定位精度隨待測目標與影像系統之距離 增加而變差,整合式定位定向系統精度受 GNSS 訊號遮蔽狀況遠較空載系統嚴 重而其作業環境亦受既有路網的限制。個人攜行的移動遙測製圖技術機動性遠 較上述二者高,具備更佳的作業彈性,唯因個人負重的限制,所以其可攜帶的系 統精度自然較上述二者為低。因應智慧移動裝置的興起,並隨著硬體與軟體效能 的提升,穿戴或手持式的系統實現不再遙不可及。所以本案之目的除了移動遙測 製圖技術核心技術外,更將著重於探討未來多平台移動遙測製圖技術之作業模 式與其成果之聯合處理架構,近年尤針對室內測繪之應用多加著墨,對多平台移 動製圖技未來的願景,將能夠達成陸海空、室內外與各式載具的無縫測繪,故本 節首先針對多平台製圖技術之沿革歷程擇要提供精簡的回顧。
1.2.1 車載移動製圖技術回顧與現況
車載移動製圖技術的濫觴可追溯至1980 年代初期部分加拿大的省政府及美 國 州 政 府 提 出 的 移 動 式 高 速 公 路 設 施 維 護 系 統(Mobile Highway Inventory System, MHIS)之需求。從 1980 年代迄今,目前初估至少 1000 台車載移動遙測 製圖系統(含街景車)正遍布世界各地提供快速的空間資訊擷取方案,其中重要的 里程碑可分為三個階段;第一階段為前 INS 時期,約自 1983 年自 1993 年;第 二階段為後 INS 時期,約自 1993 年起至 2000 年;而最後一個階段為車載光達 時期,約自2000 年起至迄今。為因應不同使用者之需求,車載移動遙測製圖技 術在這30 年來其定位定向系統與觀測系統皆有明顯的變化,以下就分這三個時 期簡單介紹代表性的系統與參考文獻。前 INS 時代的第一個代表性系統為加拿
大亞伯達省政府與卡加利大學(University of Calgary)共同發展 Alberta MHIS。早 期的車載移動製圖技術使用航位推算感測器,如陀螺儀(Gyroscopes)、加速度計 (Accelerometers)及里程計速器 (Odometer) 等,利用相對定位的原理求取定位 解。此時期所用的感測器多為類比式相機,所拍攝的照片詳實記錄公路設施的狀 況,提供維修單位即時的公路資訊。而此時期第二個代表性系統為美國俄亥俄州 立大學(The Ohio State University)製圖中心(Center for Mapping)研發車載移動製 圖系統,稱為 GPSVan。該系統使用 GPS 及里程計數器提供導航參數,該系統主 要感測器為兩部可動態連續拍攝立體像對的相機,透過近景攝影測量的原理可 獲得特徵物的三維空間坐標,其定位精度界於0.3 至 3 公尺間(Grejner-Brzezinska, 2001)。
後INS 時代的代表系統為加拿大卡加利大學所研發的 VISAT 系列,該校投 入車載移動製圖技術的研發已將近 30 年,首先於 1993 年順利將 INS/GPS 系統 整合至Alberta MHIS 中並發展出第一代的遙測技術架構,稱為 VISAT Van 第一 代(Shin, 2005)。接下來提出的 VISAT 第二代整合了 INS/GPS、里程計數器、彩 色CCD 相機、攝影機等完整架構(El-Shiemy, 1996)。這套系統為全球首度引入使 用環型雷射陀螺儀(Ring Laser Gyroscope, RLG)之導航等級 INS(陀螺飄移<0.01 度/小時)之系統,其定位精度為 0.1 至 1 公尺。該系統具備可調式攝影間隔與較 高的拍攝行車速度(100km/hr)。2003 年該系統亦獲得加拿大研究學會大筆研究資 金,在 VISAT 第二代的基礎上,針對硬體及相關軟體性能進行升級並打造全新 的車輛,稱為VISAT 第三代。與 VISAT 第二代相較之下,除電力系統大幅升級 之外,控制電腦體積也大幅縮小,CCD 相機之性能大幅提昇並使用更高等級的 INS/GPS 整合系統。後光達時期約自迄今,與前二個階段的遙測製圖技術相較之 下,其主要差異在影像擷取感測器部分新增的車載光達。
國內關於車載移動製圖系統相關的完整研發工作始於2008 年,成功大學於 2008 年自主研發影像級車載移動製圖技術(含軟硬體),稱為鷹眼系統,如圖 1.9 所示。該平台實測成果顯示無控制點直接平面定位精度為15 公分(均方根誤差),
三維定位精度為30 公分(均方根誤差) (Li, 2010),而部份成果亦於美國導航學會 GNSS2010 年會發表並獲得最佳論文獎。本團隊自行研發了包含多元感測器系統 整合與觀測量同步、機電設計、精密定位定向演算法、感測器率定與直接定位模 組等自主研發的移動製圖關鍵技術,也成功為國家訓練相關的技術人才。其他國 家之空間資訊領域學界與產業界在這段時間亦積極地發展車載影像級與光達級 移動製圖技術,由這些發展趨勢可知,車載移動遙測製圖技術確實是能夠滿足空 間資訊相關領域,日漸迫切需求的快速採集資料解決方案,而近年來國內外商用 車載移動製圖技術之實例可參考(江凱偉 et al., 2012)。國內目前無單位實際進行 具備直接定位能力之車載光達移動測繪系統研製。而商用系統部分,國內空間資 訊領域廠商自2008 年起迄今陸續引進至少二套影像級的車載移動製圖系統,平 均每套售價約在新台幣1500 萬元左右。同時另有其他廠商引入多達四套車載光
達級移動製圖系統,平均每套售價約在新台幣 3000 萬左右。這些商用系統已陸 續承接不少政府與私人公司委託之中大型計劃。故目前至少有 6 套車載移動製 圖系統可以提供移動製圖服務,同時國內至少有超過 5 家的導航圖資公司擁有 總數超過 20 台的路調車(無近景攝影測量功能)定期走訪全台更新導航圖資,以 提升圖資更新效率。同時在 2013 年起國內公路單位在公路設施清查與水利單位 之相關應用諸多大型計畫中亦陸續導入多平台移動製圖技術,如此可見多平台 移動製圖技術已逐漸被不同領域的使用者接受並逐漸深化此類技術在空間資訊 相關領域的應用空間。而內政部國土測繪中心為公務機關之翹楚,率先於 2012 年執行中的通用版電子地圖工作案中以官方身分評估車載移動製圖系統於通用 版電子地圖實作之效益,並於2015 年著手開發自有的車載移動製圖系統。
圖 1.9 成功大學自主研發之影像級車載移動製圖系統-鷹眼平台 1.2.2 個人攜行製圖技術回顧與現況
個人攜行移動製圖技術的發展可追溯自2000 年代初期,加拿大卡加立大學 空間資訊工程系發展出輕量且低成本之個人攜行移動製圖系統之原型,在相機 與待測物距離維持30 公尺之條件下,該系統無控制點平面直接定位精度為約為 20 公分,高程精度約為 10 公分。系統硬體成本在新台幣 50 萬元以下,本原型 只使用數位磁羅盤而非使用慣性測量系統提供姿態訊息,唯數位磁羅盤在都市 地區易受磁場干擾而呈現不穩狀態,未來宜以慣性測量儀取而代之以提供更穩 定之姿態訊息(Ellum, 2001)。個人攜帶式製圖系統尤其有利於災區之測量,於第 一時間以人員攜帶系統進入災區蒐集空間資訊,以有效達到災損評估及災區域 監控之目的。圖1.10 所示為 Trimble 所發展的室內移動製圖系統(Trimble Indoor
Ladybug 3 全景相機
GPS / IMU 工業級數位相機
輪速計
Mobile Mapping Solution),此系統搭載光達、全景相機、慣性測量儀與輪速計;
因本系統強調室內製圖之應用,所以就不搭載GNSS 接收機。
圖1.10 Trimble 的室內製圖系統(摘自 https://www.trimble.com)
隨著移動測繪系統的發展,相機、GPS 接收儀、INS 等等被整合至各種的平 台上,大部分的移動測繪系統會選擇運輸載具,例如車子做為其平台(El-Sheimy, 1996),更方便地沿路收集資料,這些所蒐集到的影像序列或是環景影像可以用 來進行移動物體與交通號誌的偵測(Sun et al., 2008;任志恆,2011),或是道路邊 界線萃取(Li, 2009)等應用。行人攜帶的後背式移動測繪系統(Backpacked Mobile Mapping System, BMMS) (Ellum, 2001),則可提升移動測繪系統的可攜性與便利 性,使其能應用在崎嶇地形、森林地區、狹窄巷弄等車子無法進入的地區。
可攜式移動測繪系統(Portable Panoramic Image Mapping System, PPIMS)配 備8 部高解析度單眼相機(曾義星等人;2014),以環狀的排列的方式固定於平台,
平台上設置同時曝光機制,使得 8 幅同時成像的影像可構成環場全景影像。然 而,架設多個測站後會產生大量的影像以供使用者觀看和量測,觀測者不易於大 量影像中找尋目標。因此,本研究將同一測站的多張影像合併為一球形環景影像 (Spherical Panorama Image, SPI),利用此球形環景影像來進行測繪。
應用 PPIMS 於地物點定位的流程包含了系統率定、環景影像產製、外方位 解算及測繪。經過系統率定後(王彬權,2012),可利用不同測站間影像的連結點 及平台中心位置觀測量,以相機與平台中心的相對位置及方位關係為約制條件,
進行光束法空中三角平差,得到每張影像的外方位元素(蔡博慶,2012)。接著可
應用多張影像的前方交會獲得物空間點位三維坐標。雖然球形環景影像 SPI 不 完全符合嚴謹的共線幾何,但仍可應用光束法平差的原理,利用影像中的共軛點 坐標進行修正,迭代計算出測站平台方位與共軛點之物空間坐標(Tseng et al., 2016;林冠穎,2014) ,應用此方式得到的物點定位精度符合內政部國土測繪中 心訂定之千分之一地形圖測製規範。
目前亦有商業化的環景影像測繪系統如台灣儀器行代理的 Trimble V10 Imaging Rover。此系統配備 12 部相機,頂部可架設 GNSS 天線,如圖 1.11 左,
觀測時可架設在測桿上,配備控制面板方便野外作業(如圖 1.11 右)。整體系統相 當輕巧實用,也有完整的軟體系統支援後續的影像處理瀏覽及量測工作,相關的 精度規格如附件所示,定位精度在水平方向的均方根誤差約為10mm,垂直方向 約為 7mm。此系統整合了全球定位系統與環景影像攝影裝置,能夠拍攝 360 度 環景數位影像,提升周圍環境測量的效率。目前已有案例在紐西蘭Larnach 城堡 與美國佛羅里達州運河周圍實際進行量測與精度評估(Page et al., 2014;Dahlberg, 2014),其中也包含了地籍測量界址點的量測。
圖1.11 Trimble V10 Imaging Rover
1.2.3 穿戴式移動製圖系統回顧與現況
在室內導航技術的蓬勃發展下,穿戴或手持裝置的定位精度有顯著的提升,
並隨著各式各樣的微機電感測器成本與體積逐漸下降,加上一般手持裝置皆搭 載有相機或錄像影機的功能,因此許多室內導航研究中,也開始利用影像與深度 感測器,甚至光達等儀器來輔助導航應用。然而影像成果在室內應用上,多半為 輔助導航,大部份研究皆未探討將定位成果用於災情獲取上。頭盔式的室內導航 技術(Beauregard, 2006),將慣性感測器與 GPS 天線放置於頭盔上,利用行人航 位推算演算法來達到室外與室內的無縫式定位效果,如圖 1.12 所示。在以頭盔 為平台的研究方面(Bretschneider et al., 2006),則有探討頭戴式的顯示器對於消
防員的用途,裝置如圖 1.13 所示。在原本頭盔上,加裝攝影機或是相機,甚至 是熱感應儀器來協助救災活動。此擴增實境的顯示應用與導航輔助上,可以影像 上量測或者偵測到的特徵點來進行定位與姿態的輔助(Menozzi et al., 2014),將影 像點坐標透過載台本身的內外方位參數轉換為大地坐標系統,並透過影像匹配 來輔助定位。
圖 1.12 頭盔式穿戴裝置(Beauregard, 2006)
圖 1.13 頭戴式的顯示器(Bretschneider et al., 2006)
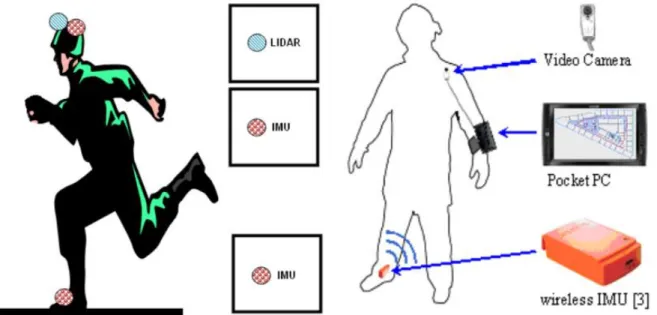
此外,國外研究也提到以身體不同部位為載台的成果,如以體軀幹為核心的 定位感測系統 (Langer et al., 2012),如圖 1.14。此套系統同樣搭載有慣性原件外,
更有光達與相機為影像輔助,來開發相關定位演算法。前述提到的系統中,皆為 整合在同一載台上,國外研究中也有提到將各感測器分開放置來確保成果穩定 性(El-Mokni and Govaers, 2011;Bernoulli et al., 2011),將定位演算法著重在足攜 式的行人航位推算(Pedestrian Dead Reckoning, PDR),如圖 1.15 左所示,為分散 式定位系統,利用將IMU 放置於腳上來實現足攜式航位推算演算法外,更將光 達與另一IMU 放置於頭頂,用於輔助計算更精確的航向。而圖 1.15 右所示為配 戴微型電腦並加裝錄像影機於肩膀上協助定位與收集圖資等資訊。
圖1.14 背包式穿戴儀器(Langer et al., 2012)
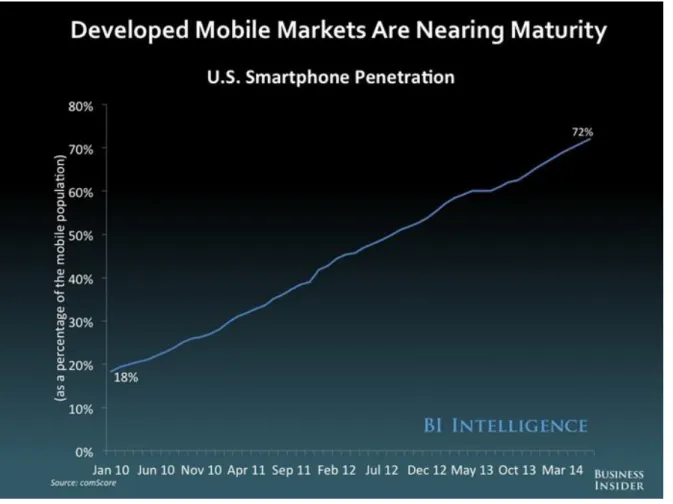
圖1.15 分散式穿戴儀器(El-Mokni and Govaers, 2011;Bernoulli et al., 2011) 近來穿戴與手持裝置的發展,智慧型手機廣大的全球市場開始吸引中國與 其他中低階智慧手機廠商的加入,打破了過去台美韓主導的高階智慧型手機市 場,使得智慧型手機市場正式進入百家爭鳴的時代(江凱偉等人,2014;Blodget et al., 2012)。如此的競爭可以預期高階智慧手機的系統規格與硬體性能也將在維 持穩定售價的前提下持續地推陳出新,而中低階價位的智慧型手機其性能也在 逐年提升,因此手持裝置搭載的感測器種類將越來越齊全,且系統精度在排除製 造商的成本考量因素後理應逐年提升。如下圖 1.16 所示,美國的智慧型手機普 及率在2014 年 3 月就已達到 72%,同時由於前述中低階智慧型手機的發展,智 慧型手機的平均售價逐年降低(圖 1.17),這將使得智慧型手機除了普及於先進國 家以外,也將開始在全球的發展中國家開始普及,尤其是中國與印度等擁有大量 人口的國家,這一轉變將開啟智慧型手機市場的新頁,而全球手持智慧型手機的 人口未來仍將持續地快速上升,並且並不侷限於先進的富裕國家。
圖1.16 美國的智慧型手機普及率折線圖(Blodget et al., 2012)
而為了滿足製圖與導航等應用,智慧型手機需要配備有全球衛星定位系統、
微機電系統(Micro Electro Mechanical Systems, MEMS)感測器、高性能的計算處 理器和高畫素的相機等。2012 年的統計數據已表明約有 75 %的智慧型手機配備 有慣性感測器(江凱偉等人,2014);而法國市場研究機構 Yole Development 公司 也統計出約有 49700 支的智慧型手機單位配有加速度計和陀螺儀。全球衛星定 位系統是為了應用於 Apple 或 Google 本身的地圖導航應用,而慣性感測器更是 遊戲或健康導向的應用軟體所必須具備的基礎核心,相機更是不可或缺的日常 生活感測器。因此可以預期未來不論是高階或中低階智慧型手機,搭載前述感測 器的機型勢必成為主流,且精度規格也將隨手機的推陳出新而逐漸提升。
此外,2014 下半年開始,可以感受到由小米手機推出的穿戴式手環掀起的 風潮,如圖 1.18 所示,目前搭載有運動感應器與藍牙晶片,主要是搭配運動相 關的應用軟體。然而運動感應器即是前文所述的慣性感測器,而將慣性感測器固 裝於人體其他部位,以輔助行人導航之技術由來已久,其穩定性與精度都比使用 手持裝置進行導航的效能更優。而造成此一現象的主要原因有二:一為固裝於人 體其他的部位,人體行進時感測器會受到的雜訊干擾會比手持裝置來的低;二則 為穿戴裝置能夠跳脫智慧手機的硬體與售價限制,成為獨立產品以後,能夠使用 精度規格較佳的感測晶片。此外,藍牙傳輸功能未來也將能與蘋果的iBeacon 技 術結合,用於輔助行人室內定位。圖1.19 為 Business Insider 預估未來幾年穿戴 式裝置的銷量成長,其中尤其看好蘋果今年將推出的Apple iWatch (圖 1.20),將 佔據穿戴式市場的主導地位。因此總結小米智慧手環與蘋果智慧手表的現況與 未來,可以預期未來人們將越來越習慣穿戴式裝置,使得過去因為種種原因而無 法普及的穿戴式行人室內定位技術將有可能重新成為技術重點。
圖1.18 小米穿戴式手環(摘自 http://www.mi.com/tw/miband/)
圖1.19 穿戴式裝置預測圖(Blodget et al., 2012)
圖1.20 Apple iWatch (摘自 http://www.apple.com/tw/watch/)
小米手環內部有慣性導航感測器,即加速度計與陀螺儀,小米公司將其用於 運動行為的偵測,而其偵測的原理與後面提及之行人航位推算演算法中,計步演 算法的概念相去不遠,同時如前所述,因為配戴位置的差異,使得手環一般狀況 下能夠偵測到較手持裝置更明顯的運動訊號。因此未來小米手環若能具備開發 環境,將能採集感測器資訊用於輔助行人導航定位中計步的精確度,透過藍牙等 無線通訊技術,將資料傳送至手持裝置與手持裝置的感測器資訊整合,從而獲得 更優的定位推估。另外,iWatch 已能夠提供使用者自行開發相關軟體並安裝使 用,感測器和配戴位置則與手環的特性相當,但其具備有處理器能夠提供進一步
的演算,甚至能夠安裝手持裝置的定位與災情獲取軟體。因此這兩種穿戴式裝置 未來將有很大的可能,能夠與手持裝置一起建構一套整合式的行人定位與災情 獲取系統,其搭載的感測器與配戴的位置,能夠輔助手持裝置的演算法,提升定 位的精度。本團隊目前也持續關注這類產品的發展,諸如搭載的感測器種類與市 場接受程度等。
1.2.4 室內製圖系統回顧與現況
對於室內製圖系統技術,其相似應用在同步定位與地圖構建(Simultaneous Localization and Mapping, SLAM),同步定位與地圖構建大部分採用的感測器為 慣性量測儀及三維雷射測距儀或光達,利用慣性量測儀加輔助資訊完成導航,並 利用三維雷射測距儀或光達建立周遭環境,其目的為機器人導航及避障,故其成 果通常自成一坐標系統。早期的SLAM 技術文章(John and Hugh, 1991),文中說 明定位定向之狀態項,利用卡曼濾波器完成定位及定向,並在卡曼濾波器更新部 分,利用地圖作為更新資訊進行約制,完成 SLAM 技術演算法。或利用慣性量 測儀、輪速計及三維雷射測距儀,以 SLAM 技術在多障礙空間中,利用三維資 料建立二維虛擬平面圖,在偵測平面圖中的特徵點進行,建立更新觀測量,修正 卡曼濾波器(Oliver et al., 2004)。而近年來,除定位定向沿用慣性量測儀外,所搭 配製圖感測器逐漸被 Kinect 取代(Des Bas, 2011;Khoshelham, K. and Elberink, 2012)。
室內移動製圖技術相關專利,有系統透過搭載慣性量測儀、雷射掃描儀和 CCD 相機,建立室內三維模型,並在測試區內設立多個標示,利用標示約制整 體精度(El-Hakim and Boulanger, 1999)。另外相關之專利設計平台,可裝置於推 車上或個人背袋,其搭載GPS、導航等級慣性量測儀、相機和雷射掃描儀,利用 GPS 提供初始位置進行定位,而室內製圖部分則依賴導航等級之慣性量測儀精 度維持,最終提出室內三維製圖資料(Lithopoulos, 2009)。也有系統考量入口時的 轉換模式(Powers et al., 2012),在室外時使用 GPS 導航,而室內時使用 SLAM 導 航。另有研究提出可攜式電子裝置,如手機和 PDA,其中包含加速度計、無線 接收機、震動馬達、展示與記憶體,透過網路與主伺服器連線,使用端收集 GNSS、
無線訊號強度與影像,依特定路線或指示運動,利用伺服器計算導航或製圖和儲 存導航資料及平面圖(Ogale et al., 2014)。
1.2.5 無人機應用於災後環境重建之回顧與現況
依據國外光達製圖的先行研究,利用無人機定位與製圖技術除了可快速進 行環境重建外,透過定位技術更可快速地重建災後環境的樣貌。在光達製圖應用 中,傳統二維資訊並無法完全滿足無人機進行製圖的需求,除了傳統的二維平面 圖資外,為了配合多旋翼無人機靈活機動性,許多無人機研究也投入在三維環境 的重建上,多旋翼無人機搭載三維或者兩個以上的光達便可以滿足此類需求,透
過不同方向上的掃描,此類三維點雲更可以精確的建構出真實環境 (Dryanovski, 2011)。除了三維點雲外,另一種表示三維環境的方式為將現實世界網格化,透 過具有三維體積的網格點來描述環境(Morris, 2010),這種方式雖然會因為網格點 大小影響圖資精確程度,但是卻可以大幅提高地圖即時展示與計算上效能。圖 1.21 為三維點雲圖資,圖 1.22 為三維網格點雲圖資。三維點雲展示,係以空間 中觀測到的物點,在坐標位置上以點代表空間資料,而三維網格點雲則是將空間 切割成三維體積的積木大小,依據物點位置,畫出一個個如同積木的三維格狀物 體來展示圖資。
圖1.21 室內三維點雲圖資(Dryanovski, 2011)
圖1.22 室內三維網格點圖資(Morris, 2010)
光達製圖技術,國外也有研究將光達應用在地下洞穴中進行環境探勘。地形 崎嶇不平使得移動測繪系統難以移動,因此需要設計避免晃動過大之載具。利用 光達裝載於適應於崎嶇地形的路基式機器人載具,避免光線不足及地形方面之 問題。然而,結合輪速計之資訊達成更佳的SLAM 成果(Hähnel, 2002)。圖 1.23(a) 利用光達分別平行和垂直裝置機器人之平台上,並將機器人調整至適應礦坑地 形的型態。圖1.23(b)提供 2D SLAM 之成果,建置礦坑之平面圖。再者,僅用二 維的平面圖無法明確表示崎嶇不平的礦坑環境,因此需要進行3D SLAM 提供完
(a) (b)
(c)
圖 1.23 光達 SLAM 成果(Hähnel, 2002):(a)路基式平台(b)2D SLAM (c)3D SLAM
除了利用光達在礦坑環境中進行2D SLAM 和 3D SLAM,利用一個光達裝 載傾斜移動之平台亦可以達成良好之成果(Neumann, 2014)。該酬載不僅適應礦 坑地形的移動測繪系統,也設計自動改變光達軸向的平台。該平台可沿著垂直角 0 度至 90 度進行傾斜,能獲取更多方向之資訊,如圖 1.24 為此酬載進行 3D SLAM 之成果,獲取的三維空間資訊能進行實際用途。
. 圖1.24 光達之 3D SLAM 成果(Neumann, 2014)