國立臺灣大學工學院機械工程學研究所 碩士論文
Department of Mechanical Engineering College of Engineering
National Taiwan University Master Thesis
輪內馬達懸吊系統之分析與設計
Analysis and Design of the Suspension Systems for In-Wheel Motors
梁誌明
Liang, Chih-Ming 指導教授﹕劉 霆 博士 Advisor: Liu, Tyng, Ph.D.
中華民國99年7月
July, 2010
i
口試委員會審定書
ii
誌謝
離開學校已經五年的我,又重新抱起書本當個學生,在這說短不短的碩士兩 年之間,無論是課業上或是其他思想上都有所改變。雖然本研究成果是碩士畢業 關鍵所在,但這項成果也是家人、老師、實驗室、學長、學弟等大力的幫助。生 活與學業上最大幫助無非是指導教授劉霆老師的幫助,以及實驗室其他夥伴文傑、
國瑋、洪虢等的共患難。除此之外在輪內電動車專題上,也相當感謝把這專題作 得更加完善的昉晛、柏宇、柏亨、品瀚、博仁、文遠、正平、芳明、幸修等學弟 們。最後要感謝是家人對我這暫離職場的決定得以諒解以及生活中所需之經濟的 幫助。
iii
輪內馬達懸吊系統之分析與設計
梁誌明
摘 要
使用輪內馬達可以簡化車輛傳動系統,在目前電動車發展上被視為一個主要 方向,但相對使簧下質量增加的結果會讓車輛動態性質有明顯影響,所以本研究 將對發展一種針對輪內馬達的新型懸吊系統。本研究中先以三自由度懸吊系統配 合動態減振理論為基礎,在簧下元件間增加輪內馬達懸吊系統,稱之為第二懸吊。
其次,為了在車輪內配置第二懸吊概念,先對目前已有的系統進行拓樸分析,加 入輪內馬達與第二懸吊等次系統且進行排列組合,便發展出多種具有轉移簧下元 件質量的機構拓樸設計。接著,利用設計方法將多種機構拓樸設計方案,根據次 系統的特性,轉換及發展多種機構概念設計。最後,本研究將以一設計範例,包 含選定適當的目標車與輪內馬達,接著概念設計與細部設計,以說明及展示輪內 馬達懸吊的完整設計方法。本研究針對輪內馬達懸吊系統進行其車輛動態特性探 討,及發展系統化的設計方法,對輪內馬達之應用及實現應有助益。
關鍵字:輪內馬達、簧下質量、第二懸吊、動態減振原理
iv
Analysis and Design of the Suspension Systems for In-Wheel Motors
Liang, Chih-Ming Abstract
Using the In-Wheel motors may simplify the transmission systems of the vehicles, so it will be a main direction in the electric vehicles development. But the In-Wheel motor build-in the the unsprung mass, becoming the heavy unsprung mass have the obvious influence of vehicles dynamic. So this study analyzes and designs of the suspension systems for In-wheel motors. Firstly, in this study using 3-D.O.F Suspension Systems based on the Dynamic Vibration Absorbers Theory, the suspension of in-wheel motor build-in the unsprung mass be called the second suspension. Then in order to realizing the the second suspension, topology analysis of the usual suspension system adds on the second suspension and a coupling of sub-systems, then developes some kinds of topological design. Next to design method functional diagram topology analysis obtained plan, according to sub-systems characteristic, to transform and develope many kinds of organization conceptual design of system. Finally, this study by a design model will contain in designation suitable car and the in-wheel motor, then the conceptual design and detailing of system will show integrity design method of suspension systems of In-Wheel motors.
This study in In-wheel motor suspension system carries on its vehicles dynamic characteristic discussion, and the development systematization design method, let the
v
application of and realization in-wheel motors helpfully.
Keyword: in-wheel motor,unspung mass, second suspension, dynamic vibration absorbers theory
vi
目錄
口試委員會審定書... i
誌謝... ii
摘 要... iii
Abstract ... iv
目錄... vi
圖目錄... ix
表目錄... xii
符號彙整... xiv
第1 章 緒論... 1
1-1
前言 ... 1
1-2
文獻回顧 ... 4
1-3
研究動機與目的 ... 7
1-4
研究目標與規劃 ... 8
第2 章 理論基礎... 10
2-1
四分之一車懸吊模型 ... 10
2-1-1 二自由度懸吊之運動方程式 ... 12
2-1-2 三自由度懸吊之運動方程式 ... 14
2-2
二分之一車懸吊模型 ... 16
2-3
輸入路面 ... 25
2-4
人體加速度加權 ... 28
2-5
車輛振動特性指標 ... 30
vii
2-6
小結 ... 31
第3 章 輪內馬達懸吊系統之分析... 32
3-1
四分之一懸吊系統運動分析 ... 32
3-1-1 貼地性分析 ... 35
3-1-2 舒適性分析 ... 38
3-1-3 小結 ... 39
3-2
輪內馬達懸吊系統之參數設定 ... 40
3-2-1 簧下質量轉移比例 ... 40
3-2-2 自然頻率 ... 44
3-2-3 參數設定 ... 48
3-2-4 小結 ... 49
3-3
二分之一車懸吊系統運動分析 ... 50
3-3-1 前後相同懸吊 ... 52
3-3-2 前後相異懸吊 ... 56
3-3-3 小結 ... 58
3-4
小結 ... 58
第4 章 輪內馬達懸吊系統之概念設計... 60
4-1
二自由度懸吊系統之功能圖 ... 60
4-2
三自由度懸吊系統之功能圖 ... 63
4-2-1 次系統合併 ... 63
4-2-2 簧下質量轉移 ... 65
4-2-3 轉移比例探討 ... 73
4-3
次系統之機構方案 ... 74
4-4
系統配置 ... 76
viii
4-5
小結 ... 79
第5 章 輪內馬達懸吊系統之實務設計... 81
5-1
設計目標與規格 ... 81
5-2
概念設計與配置 ... 83
5-3
系統細部設計 ... 86
5-3-1 輪內馬達 ... 86
5-3-2 輪轂軸承 ... 87
5-3-3 聯軸器 ... 90
5-3-4 第二懸吊 ... 95
5-3-5 輪框 ... 101
5-3-6 小結 ... 102
5-4
完整系統振動分析 ... 105
5-5
小結 ... 111
第6 章 總結與未來展望... 113
6-1
總結 ... 113
6-2
未來展望 ... 116
參考文獻... 118
附錄 A ... 120
附錄 B ... 121
附錄 C ... 125
ix
圖目錄
圖 1-1 通用汽車輪內馬達運用[1] ... 2
圖 1-2 輪內馬達的運用 ... 2
圖 1-3 Mitsubishi Motors-Colt EV(2005) [3] ... 2
圖 1-4 國家工業研究院研發之 LEV[4] ... 3
圖 1-5 二自由度與三自由度懸吊系統 ... 5
圖 1-6 Bridgestone 的輪內馬達懸吊系統[8] ... 5
圖 1-7 三自由度並串連懸吊系統 ... 6
圖 2-1 二自由度與三自由度振動模型種類 ... 11
圖 2-2 二自由度懸吊圖 ... 12
圖 2-3 通用三自由度懸吊圖 ... 14
圖 2-4 二分之一車系統六自由度振動模型 ... 17
圖 2-5 ISO 路面粗糙程度[16] ... 26
圖 2-6 輪胎貼地力與轉向力關係圖[9]... 30
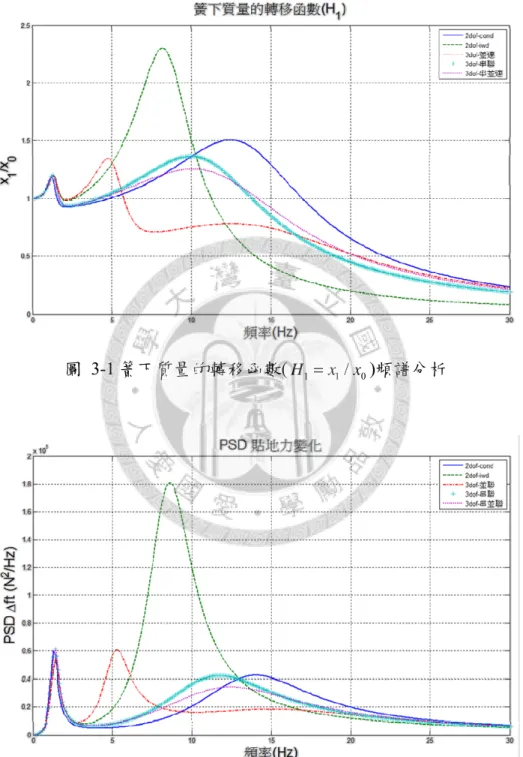
圖 3-1 簧下質量的轉移函數(
H
1= x
1/ x
0)頻譜分析 ... 36圖 3-2 ISO 路面粗糙度 C 級之 PSD 貼地力振幅頻譜分析 ... 36
圖 3-3 路面衝擊貼地力時域變化圖 ... 37
圖 3-4 C 級路面之 PSD 加權後加速度頻譜分析 ... 38
圖 3-5 五種懸吊系統的振動指標綜合比較(Cond EV 為基準) ... 39
圖 3-6 簧下轉移函數頻譜對轉移比例差異分析 ... 41
圖 3-7 C 級路面之 PSD 貼地力變化頻譜對轉移比例差異分析 ... 41
圖 3-8 路面衝擊 20mm 貼地力對轉移比例時域變化圖 ... 42
圖 3-9 C 級路面之 PSD 加權加速度頻譜對轉移比例差異分析 ... 43
圖 3-10 轉移比例對振動指標的比較(以 Cond EV 為基準)... 44
x
圖 3-11 簧上轉移函數頻譜對
w
d 差異分析 ... 45圖 3-12 C 級路面之 PSD 貼地力變化頻譜對
w
d 差異分析 ... 45圖 3-13 路面衝擊 20mm 貼地力對
w
d時域變化圖 ... 46圖 3-14 C 級路面的 PSD 加速度頻譜對
w
d 差異分析 ... 47圖 3-15 不同
w
d 的振動指標比較(以 6Hz 為基準) ... 48圖 3-16 自然頻率 wd對貼地性與舒適性的分析 ... 49
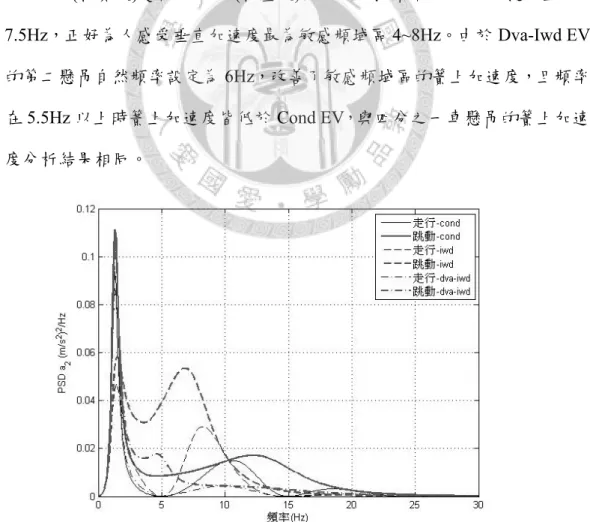
圖 3-17 C 級路面下的 PSD 簧上垂直加速度 ... 52
圖 3-18 C 級路面下的 PSD 俯仰角加速度 ... 53
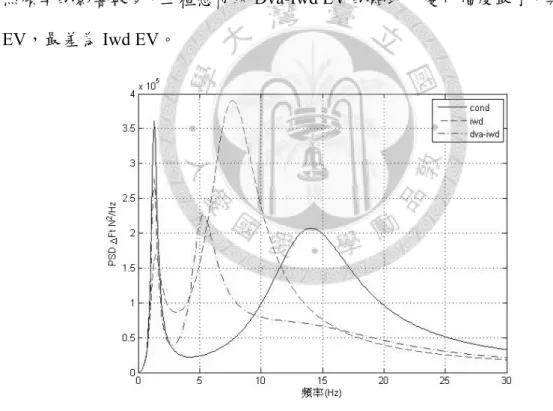
圖 3-19 加總前後輪 PSD 貼地力振幅 ... 54
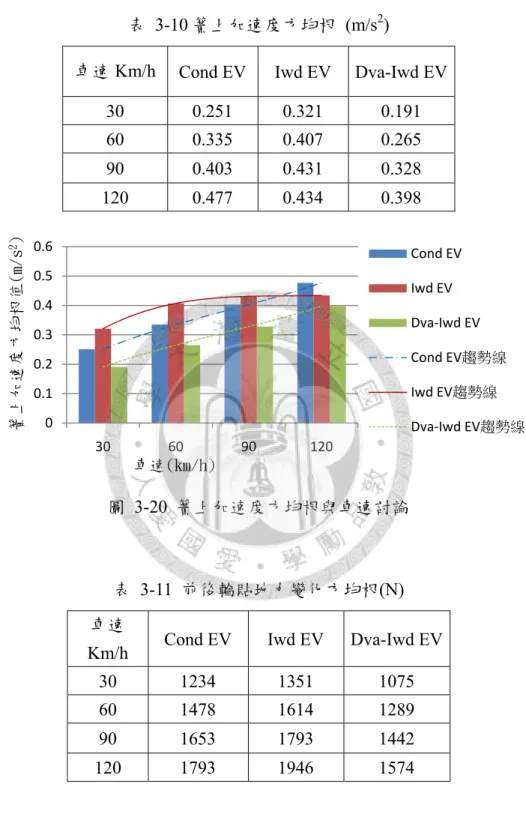
圖 3-20 簧上加速度方均根與車速討論 ... 55
圖 3-21 前後輪貼地力變化方均根與車速討論 ... 56
圖 3-22 二分之一車之 PSD 加權簧上加速度頻譜圖 ... 57
圖 3-23 走行模式下之舒適性與貼地性指標分析 ... 57
圖 3-24 前後懸吊差異之前配重分析貼地性與舒適性 ... 58
圖 4-1 懸吊系統之機構圖 ... 61
圖 4-2 懸吊系統功能圖 ... 62
圖 4-3 偏心聯軸器-平面機構 ... 75
圖 4-4 偏心聯軸器-高撓性聯軸器(Highly Flexible Couplings) ... 75
圖 4-5 近似直線之四連桿機構 ... 76
圖 4-6 Bridgestone 輪內系統簡化表示 ... 77
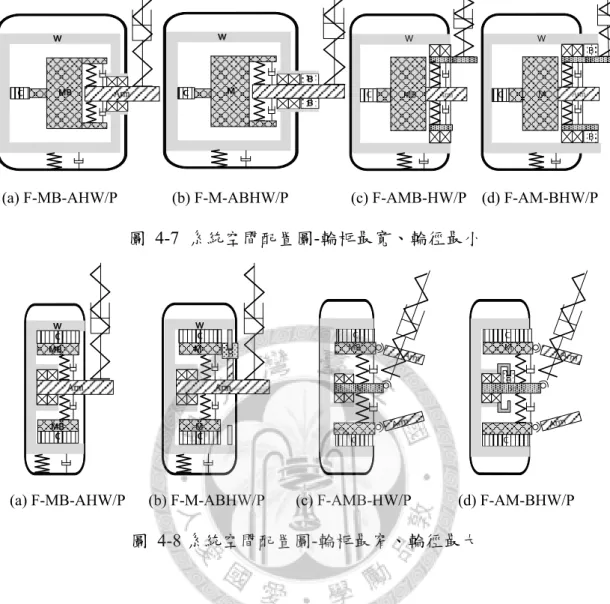
圖 4-7 系統空間配置圖-輪框最寬、輪徑最小 ... 78
圖 4-8 系統空間配置圖-輪框最窄、輪徑最大 ... 78
圖 5-1 中華汽車 Colt Plus 實體與後懸吊圖 ... 82
圖 5-2 系統配置簡圖 ... 84
圖 5-3 F-MB-AHW/P 式概念輪內馬達懸吊系統 ... 85
xi
圖 5-4 馬達機構爆炸圖與實物圖[22] ... 87
圖 5-5 輪轂軸承轉向受力計算用圖 ... 88
圖 5-6 輪轂軸承設計圖 ... 90
圖 5-7 ZERO-MAX 的 Schmidt Coupling ... 91
圖 5-8 馬達相對輪框的位移 ... 91
圖 5-9 聯軸器受力分析圖 ... 92
圖 5-10 聯軸器連桿設計圖 ... 94
圖 5-11 聯軸器設計圖 ... 94
圖 5-12 在路面衝擊 3g(約 step40mm)時第二懸吊受力時域圖 ... 95
圖 5-13 瓦特直線連桿組 ... 96
圖 5-14 第二懸吊初步配置示意圖 ... 97
圖 5-15 台灣三住之扁線彈簧 SWS52-150 的規格圖 ... 99
圖 5-16 路面衝擊 3g 時的第二懸吊速度運動分析 ... 100
圖 5-17 ACE 之 HB22-100-D5-P 減振器(L=250mm) ... 100
圖 5-18 第二懸吊三視圖與立體圖 ... 100
圖 5-19 輪框尺寸設定圖 ... 102
圖 5-20 輪內馬達懸吊系統爆炸圖 ... 103
圖 5-21 四分之一車振動性能分析 ... 107
圖 5-22 四分之一車之後輪貼地變化比的方案比較圖 ... 108
圖 5-23 二分之一車振動性能分析 ... 109
圖 5-24 二分之一車之貼地變化比的方案比較圖 ... 110
xii
表目錄
表 2-1 ISO 路面粗糙度表[16] ... 27
表 2-2 加權函數的參數表 ... 29
表 3-1 各懸吊模型的參數表 ... 33
表 3-2 貼地性懸吊方案比較 ... 37
表 3-3 舒適性的懸吊方案比較表 ... 38
表 3-4 不同轉移比例下的貼地性分析與 Cond EV 比較表 ... 42
表 3-5 不同轉移比例下的舒適性分析與 Cond EV 比較表 ... 43
表 3-6 不同
w
d下的減振性能與6HZ 比較表 ... 46表 3-7 不同
w
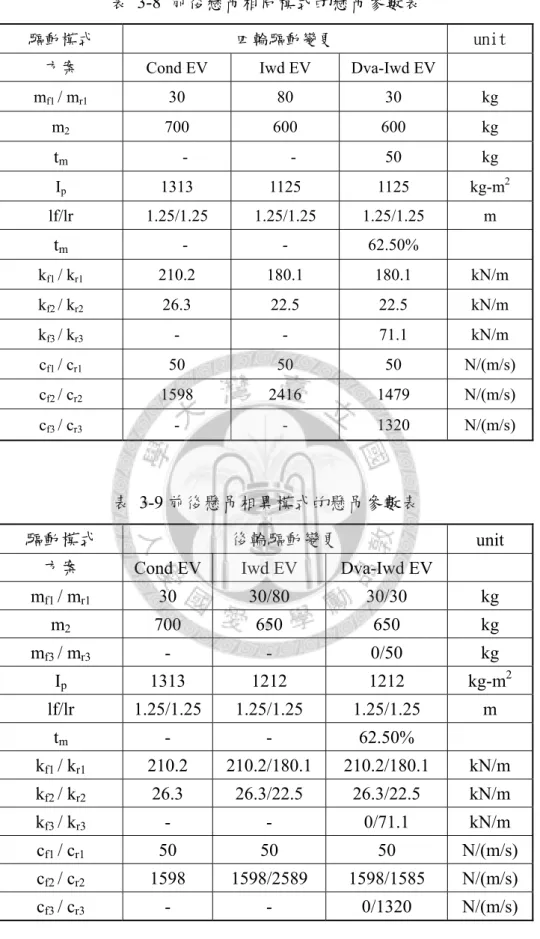
d下的減振性能與6HZ 比較表 ... 47表 3-8 前後懸吊相同模式的懸吊參數表 ... 51
表 3-9 前後懸吊相異模式的懸吊參數表 ... 51
表 3-10 簧上加速度方均根 (m/s2) ... 55
表 3-11 前後輪貼地力變化方均根(N) ... 55
表 4-1 二自由懸吊功能圖初步分類 ... 65
表 4-2 F-A,MBH,W 之三自由度懸吊功能圖 ... 67
表 4-3 F-A,M,BH,W 之三自由度懸吊功能圖(1) ... 69
表 4-4 F-A,M,BH,W 之三自由度懸吊功能圖(2) ... 70
表 4-5 F-A,MB,H,W 之三自由度懸吊功能圖(1) ... 71
表 4-6 F-A,MB,H,W 之三自由度懸吊功能圖(2) ... 72
表 4-7 Colt Plus 零件重量表 ... 73
表 4-8 簧下質量切割方案表 ... 73
表 4-9 系統方案表 ... 77
表 5-1 原車與目標車之車輛諸元表 ... 83
xiii
表 5-2 輪內馬達規格表 ... 87 表 5-3 輪內馬達懸吊系統重量表(單位:kg) ... 104 表 5-4 Colt Plus 後輪軸變更之三種方案的二分之一車參數表 ... 106
xiv
符號彙整
a
加權後簧上加速度加總m
1~3 四分之一車懸吊系統的質量1~3 1~3 2
f r
m
、m
、m
二分之一車懸吊系統的質量c
1~ 4 四分之一車懸吊系統的阻尼係數1~4 1~4
f r
c
、c
二分之一車懸吊系統的阻尼係數k
1~ 4 四分之一車懸吊系統的彈簧係數1~4 1~4
f r
k
、k
二分之一車懸吊系統的彈簧係數s
拉普拉斯轉換符號t
d 前後輪路面輸入時間差t
m 簧下質量轉移比例0~3 0~3 0~3
x 、 x 、 x
四分之一車懸吊系統的質量塊垂直位移、速度、加速度0~3 0~3 0~3
f f f
x
、x
、x
二分之一車前懸吊系統的質量塊垂直位移、速度、加速度0~3 0~3 0~3
r r r
x 、 x 、 x
二分之一車後懸吊系統的質量塊垂直位移、速度、加速度z 懸吊系統的垂直位移矩陣
z
位移的均方根值Ft
輪胎貼地力之變化v p d
H H
、 、 、H H
系統之轉移函數Ip
車輛俯仰角之轉動慣量Le
車輛前後軸距L
f 簧上質量重心到前軸的水平距離L
r 簧上質量重心到後軸的水平距離xv
C
阻尼係數矩陣K
彈簧係數矩陣M
懸吊系統之質量矩陣V
車速R r 、
座標轉換矩陣F
g seat t
S
、S
、S
路面、乘座點、貼地力變化的功率密度函數Z
懸吊系統的垂直位移矩陣之拉普拉斯轉換Z
0~3 四分之一車懸吊系統的質量塊垂直位移之拉普拉斯轉換0~3 0~3
f r
Z
、Z
二分之一車懸吊系統的質量塊垂直位移之拉普拉斯轉換Z
seat 二分之一車乘坐點之垂直位移φ
車輛俯仰角Φ 車輛俯仰角之拉普拉斯轉換
Ω
空間角頻率λ 貼地力變化比
1
第1章 緒論
1-1 前言
21 世紀初的油價暴漲事件導致電動車再次受到矚目,乃因為電比油更具著 成本優勢,且也降低人對石油的依賴。事件後,使得國際上對電動車發展越來越 殷切,更期待未來10~20 年電動車可以取代目前大部分吃油的引擎車。
因為引擎車燃燒石化燃料而產生大量二氧化碳等汙染氣體,相對使得電動 車無排汙之優點更受關注。幾使當油價回跌讓電失去成本優勢,但電動車無排汙 之特色仍將成為各大國大力推動的主因。大國之中如美國在 2002 年加州空氣資 源局通過汽車 CO2 管制法以來,政府開始要介入電動車的發展,主導方式是由 政府限制各項環保與能源標準作為手段,讓車廠把有效降低車輛污染與提高能源 效率課題正式納入主要發展方向,而超低排放、高效率之電動車更是當中最佳選 擇。
同時期造成國內外從電動車的動力,到行車的性能等都有各種不同的研究。
例如國外車廠為因應政策與趨勢,推出許多電動車,如Nissan Leaf、Telsa Motors 等車廠。從這些車廠研發的車輛當中可發現大多將馬達直接取代引擎,其傳動仍 需要變速箱、傳動軸最後驅動輪胎,傳動過程中將會浪費10~15%的能量,將這 此型的電動車稱為一般型態的電動車(Conventional Drive Electric Vehicle,Cond EV)。為了提升效率有部分研究便開始將傳動系統取消直接在車輪配置馬達直接 驅動,之後便將此稱為『輪內馬達』(In-wheel motor or hub motor)。
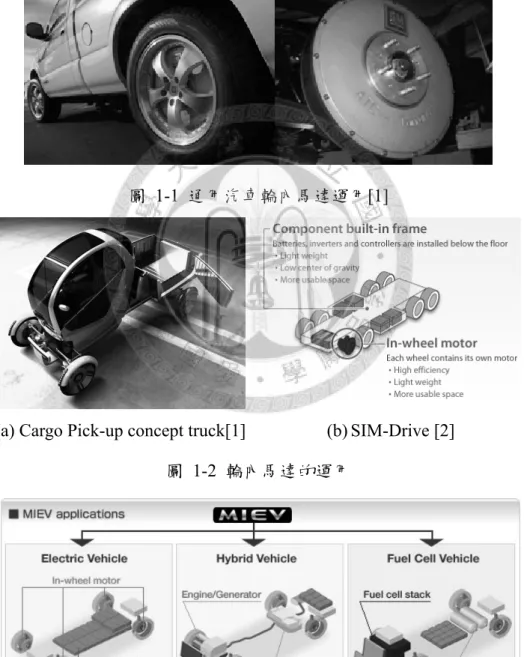
電動車藉由馬達直接帶動輪胎提供車輛所需的推力,此種模式的電動車在美 國通用汽車已有相關的車輛如圖 1-1,Cargo Pick-up concept truck 概念車(圖 1-2 左)、日本東北大學的SIM-Drive 八輪車(圖 1-2 右)等,都是利用輪內馬達完成
2
的車輛。這些車輛中特色是動力容易配置不受傳動機構影響,僅需將電能傳輸至 驅動馬達即可,不需考慮傳動軸的配置,相對之下底盤配誌設計更為簡單。路如 Mitsubishi 的輪內馬達電動車底盤研究中,讓輪內馬達與不同型式的車輛電能來 源作搭配,例如鋰電池、氫燃料電池、油電混合等作為車輛電能系統,底盤結構 會如圖 1-3 的配置關係,相當簡潔的底盤配置。
圖 1-1 通用汽車輪內馬達運用[1]
(a) Cargo Pick-up concept truck[1] (b)SIM-Drive [2]
圖 1-2 輪內馬達的運用
圖 1-3 Mitsubishi Motors-Colt EV(2005) [3]
3
除國外研究外,國內工研院也投入電動車的研發,但將研發重點聚焦於小型 移動載具為主,發展起因為車載電池普遍受限於所含的能量密度低使得走行距離 受到限制,並以此概念研發出 LEV[4](圖 1-4)。該 LEV 設定為車輛單人載具的四 輪車,同時具備許多優秀操控特性如極小轉彎半徑,其中極小轉彎半經便是利用 左右輪配置的輪內馬達系統產生不同轉速完成的特性。
圖 1-4 國家工業研究院研發之 LEV[4]
綜合前述國內外研究之輪內馬達電動車的研究,發現較一般型態電動車 有四項優點:效率優—直驅輪框減少傳動元件,代表減少傳動動能損耗。空間 優—減少原傳動元件的空間讓整車底盤有更大的運用空間。轉向優—左右輪 馬達利用動態扭力差控制改變車輛轉向性能。直接能量回收—馬達與發電機 整合成輪內電機系統,不需另外設置,這些優點可奠定輪內馬達在電動車發 展上的一個重要方向。但相對之下也有其有兩項缺點:簧下質量(unsprung mass)過重—馬達隨功率或扭力增加而增加重量,且置於輪框導致簧下質量過 重。馬達尺寸受限—輪框內安置馬達,故馬達尺寸受限於輪框尺寸,輪框尺 寸同時也受限於簧下質量。兩項主要原因都是受簧下質量限制,因為簧下質 量會引發車輛動態性質明顯下降,如舒適性與貼地性等。輪內馬達的應用讓 電動車擁有更佳的優勢,但同時也伴隨簧下質量增加的問題,固本研究將以 減輕簧下質量為探討。
4
1-2 文獻回顧
簧下質量對於車輛之乘坐舒適性與貼地性之影響,於許早以前已有學者、
專家發現,在車輛工程及動力學的相關書籍中亦皆有簡略提及,而現今大多 數車廠從事車輛設計開發則是以使用輕量化材料或結構簡化之方式,盡可能 減輕簧下質量作為因應對策。因為輪內馬達系統為了直驅不需要變速系統,
故特性上造成需要高扭力低轉速的輪內馬達,此種高扭力馬達重量大多可達 20~50kg,但馬達主要重量來至於磁鐵與線圈的電磁系統結構笨重且無法輕巧 化,也就是說簧下質量無可避免地增加5 成以上的重量。
近年來輪內馬達的懸吊改善的研究已有不少文獻以及實際改善方案,在 甯國寶等人的輪邊驅動系統對車輛垂直性能影響的研究現狀[7]收集許多相 關文獻。文中提到有關振動解決方案大致方向有輕量化、質量轉移、控制懸 吊系統,改善吸振元件等,其中Bridgestone[8]簧下質量轉移至第二懸吊上,
應用動態減振原理,屬於減振較佳的對策。
動態減振原理(Dynamic vibration absorbers theory)[9]是在一個振動系統 中將欲減振的頻率設定為減振頻率,再新增一個單自由度振動系統設定原始 共振頻率為前述的減振頻率,加入後兩個振動系統會在減振頻率下發生振動 抵銷,進而提升減振效果。H. Fukuda 等人於 1969~1990 年[10]~[14]運用動態 減振原理,在原始車輛主懸吊系統的二自由度(圖 1-5a)新增一個單自由度振 動系統,變成三自由度並聯式懸吊(圖 1-5b),該新增單自由度系統稱為第二 懸吊。H. Ghoneim 等人[14]研究得知,當簧下質量增加影響輪胎跳動情況下,
增加第二懸吊應用動態減振原理,放置在簧下比在簧上有較好的減振效果,
因為第二懸吊在簧下質量可直接降低輪胎跳動情況,間接降低簧上質量加速 度。D. Hrovat 於 1988 年的四分之一車模型下最佳化主動式懸吊的研究中[6],
在主動式的雙自由度懸吊下加入被動式第二懸吊,與原始二自由度無第二懸
5
吊的懸吊系統比較,相同的簧上加速度方均根值時,輪胎跳動減少83%。又 將被動式第二懸吊,與主動式第二懸吊比較,發現可以再
降低35%的輪胎彈跳。綜合前述,動態減振理論下的第二懸吊可以提供 優秀的壓抑輪胎跳動效果。
(a) 二自由度模型[8] (b)三自由度並聯模型[11]
圖 1-5 二自由度與三自由度懸吊系統
圖 1-6 Bridgestone 的輪內馬達懸吊系統[8]
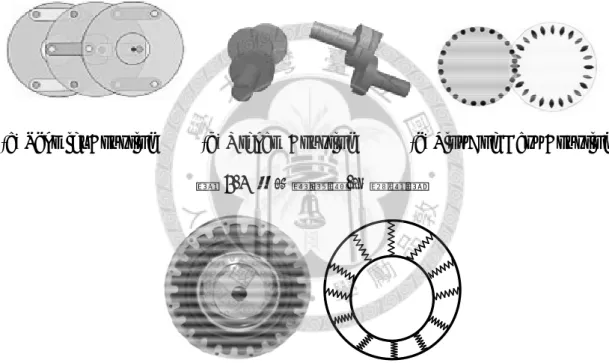
2003 年 Bridgestone[8]第二懸吊(如下圖 1-6)將馬達從簧下質量轉移成減振 質量,將其原始自然頻率設定為5.4Hz,使輪框在該頻率下振動得以減振。文獻 中系統配置可由圖 1-6 發現除第二懸吊系統外,以馬達當減振質量雖可使壓抑振 動,但與輪軸會有偏心距離,需使用聯軸器(Coupling)方才可傳遞扭力又可壓抑 振動。觀察每個零件的結構特色,如無軸直驅馬達(shaftless direct-drive motor)屬 於徑向外轉子馬達,撓性聯軸器(Flexible coupling)屬於十字雙滑塊聯軸器
K
2C
2K
1C
1K
3C
36
(Cross-Double slider coupling),馬達懸吊(motor suspension)是利用直線滑塊機構 完成的第二懸吊系統。在這系統圖可以發現,使用許多滑塊機構達成傳動以及第 二懸吊功能。
隨後 2008 年趙豔娥等人[15],針對輪轂電機獨立驅動電動車動力減振機構 設計,以三自由度並聯式架構,在簧上與減振質量(第二簧上質量)之間連接一組 減振系統如圖 1-7,在此稱為三自由度串並聯懸吊系統。較原二自由度懸吊,需 新增兩組減振系統,複雜程度增加。
圖 1-7 三自由度並串連懸吊系統
從前述文獻討論中,在簧下質量上另新增減振質量作為第二懸吊,且應用動 態減振理論,可有效降低車輪跳動。隨輪內馬達的發展,簧下質量因為馬達重量 的加入大幅提升,讓已有40 多年動態減振理論重新應用在懸吊上,甚至可利用 輪內馬達當作減振質量,相當減少簧下質量。但第二懸吊的探討僅限於振動分析 理論,並未有相關的機構設計研究。為了讓第二懸吊得以實現,本研究透過機構 設計方法,探討具有可行性且實用性高之輪內馬達懸吊系統的設計。
輪胎 輪轂電機 動子 定子
第二懸吊
車身 主懸吊
7
1-3 研究動機與目的
在電動車的發展趨勢中,輪內馬達要占一席之地需要處理許多問題,由 文獻回顧中得知,應用輪內馬達的一項重要課題是懸吊振動的問題。振動的 問題根本為簧下質量過重導致。若要讓輪內馬達得能夠是當應用除了必須減 輕簧下質量外,更要減輕因為輪內馬達增重所造成的振動問題。雖在文獻紀 錄中已有許多動態減振理論應用於車輛懸吊改善研究,但仍期待透過設計方 法來實現其構想。
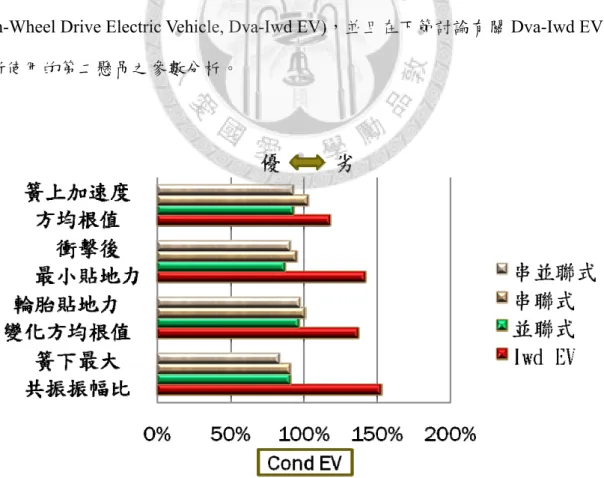
在不改變原懸吊系統架構為前提,於輪內新增一組第二懸吊系統,藉此第二 懸吊可以將馬達以及其他零件,得以從簧下質量轉移變成減振質量,再配合應用 動態減振原理,可成為有動態減振效果之輪內馬達電動車(Dynamic vibration absorber of In-Wheel Drive Electric Vehicle, Dva-Iwd EV )。以動態減振理論作為理 論基礎,讓其舒適性與貼地性必須優於輪內馬達電動車(In-Wheel Drive Electric Vehicle, Iwd EV),且相當於一般型態電動車(Conventional Drive Electric Vehicle, Cond EV)。機構設計方面需將第二懸吊、輪內馬達等裝置於輪內,可讓輪內馬達 具有減振與動力的輪內馬達懸吊系統。利用機構拓樸討論將輪內馬達、第二懸吊、
聯軸器等新增元件與煞車、輪框、軸承等搭配組合,發展出多種具有轉移簧下質 量元件的機構拓樸設計,並從這些可能性組合根據特性選擇其一進行設計成可實 現的完整機構作為參考。綜合上述所言,本研究目的為探討輪內馬達懸吊系統之 特性及構造,並發展系統化的設計方法進行系統的概念及細部設計,已能具體改 善車輛之整車舒適性與輪胎貼地性。
8
1-4 研究目標與規劃
為達成研究目的,需設定明確的目標以及規劃。懸吊振動分析的目標,是新 增第二懸吊系統於輪內馬達電動車,讓舒適性與貼地性相當或優於一般型態電動 車,從中了解相關懸吊參數的設定規則。另一目標是同時發展出具可行性的輪內 系統初步設計,系統包含煞車、主懸吊、第二懸吊、動力等次系統,最後透過一 車輛進行系統實踐。為達成此兩項目標,本論文將規劃會分成六章來達成。
第一章—瞭解電動車是未來的趨勢所在,在這趨勢之中輪內馬達模式在耗能 低多種優點之下,可占有優勢。但從文獻中可知,輪內馬達具有振動問題,其根 本在於簧下質量過重。以此作為缺點作為研究動機,並設定研究目的與目標。
第二章—理論的建立,包含四分之一車、二分之一車等懸吊的振動數值模型 與轉移函數,ISO 隨機路面功率密度函數輸入與人體加權函數,最後利用加權加 速度方均根值與貼地力變化方均根值建立舒適性與貼地性的數值化指標。
第三章—在四分之一車數學模型下,透過參數分析舒適性與貼地性,找出第 二懸吊有效減振的參數設定。包含轉移比例,簧下質量轉移給第二懸吊減振質量 的轉移比例。以及第二懸吊的原始自然頻率,可設定第二懸吊的彈簧係數。阻尼 比的設定,可設定出第二懸吊的阻尼係數;進而用二分之一車模型討論前後懸吊 相同或不同時,所造成的舒適性與貼地性差異。
第四章—輪內馬達的懸吊系統之概念設計。動力系統無法傳遞動力時,需增 加聯軸器。故達到具有轉移比例機制的功能圖,需將原始功能圖中安插第二懸吊 與聯軸器,配合輪內馬達、減振系統、煞車等次系統組合可能的功能圖,最後以 Colt Plus 的懸吊重量為例,得到不同功能圖下的轉移比例。輪內馬達的懸吊系統 之理念設計,找出符合功能圖中次系統的常見機構。在有效減振的功能圖方案下,
繪製不同次系統組合的概念系統配置圖,以及觀察空間配置特性,並在設計目標 限制下從中挑選合用的概念系統配置圖。
9
第五章—輪內馬達的懸吊系統進行實務設計,從設定目標車設定開始,找出 適當的輪內系統,根據所需的功能,選用簡單實用的機構,並且進行細部設計。
根據設計後零件重量,統計出第二懸吊的減振重量、簧下質量、簧上質量等。透 過本論文建議,設定主懸吊以及第二懸吊的彈簧係數與阻尼係數,且重新與參考 車比較,討論其最後減振效果。
第六章—針對本研究各章主要結論,予以總結。包含文獻回顧與討論、理論 基礎、參數設定與分析、系統的功能圖、理念設計、實務設計等,最後希望未來 進一步的研究方向上給予建議。
本研究主要以輪內馬達的振動問題對策為起頭,利用振動理論進行數值化分 析問題,並提出新增第二懸吊之概念來解決振動問題。最後利用機構發想與概念 設計,將有效減振模式進行實務設計。
10
第2章 理論基礎
當馬達放至簧下輪框內時稱之為輪內馬達,這作法會使簧下質量的增加,導 致的振動問題,例如車輛舒適性下降,輪胎彈跳增加使得操控性不佳等。本章將 建立其數值模擬模型來數值化其振動問題,如輪胎的貼地力變化方均根值可評估 車輪貼地性,以及加權後簧上加速度方均根值可評估乘客的舒適性。
運用數學模型獲得所需的方均根值,首先須以車輛懸吊系統四分之一車懸吊,
以及二分之一車的模型進行運動分析,並利用矩陣化運動方程式整理可得到系統 的轉移函數。再透過已函數化的ISO 隨機路面輸入,以及人體加權簧上加速度,
與系統的轉移函數進行結合,最後獲得振動功率密度頻譜(Power Spectral Density, PSD ),再將頻譜積分得方均根值。
2-1 四分之一車懸吊模型
車輛懸吊系統四分之一車懸吊提供單一車輪的運動性質,可視為二自由 度懸吊模型(圖 2-1a),為為最簡單的車輛動態分析模型。四分之一車懸吊模 型,包含輪子、懸吊、車身等元件,主要應用於垂直振動討論。二自由度有 兩個質量,分別稱為簧上質量(sprung mass) m2、簧下質量(unsprung mass) m1, 以及兩組減振系統為輪胎以及主減振系統。此模型有諸多線性假設,例如質 量固定且為線性位移、兩組彈簧與阻尼皆為線性變化、輪胎與地面貼地力恆 正,運動方程式可建立成聯立二階線性微分方程式。
簧上質量一般包含四分之一車身、部分減振系統質量、部分懸吊架質量 等。簧下質量一般包含部分的減振系統、懸吊架質量以及懸吊架上的輪圈、
煞車等。
11
前1-2 節的文獻回顧中,提到有兩種三自由度懸吊模型,分別是三自由度並 聯式懸吊與串並聯式懸吊。三自由度並聯式懸吊強調,將輪內馬達透過第二懸吊 系統支撐,並架構在簧下質量上,且應用動態減振原理產生減振效果,如圖 2-1c。
又趙豔娥等人[15]提出的三自由度串並聯式懸吊,與並聯式相較之下,再增加一 組第三懸吊系統,連結簧上質量與輪內馬達。當然三自由度尚有串聯式懸吊,又 別於並聯式與串並聯式,支撐輪內馬達的第二懸吊直接以串聯方式介入,將簧上 與簧下質量分開,形成三自由度串連式懸吊,如圖 2-1b。
m
1m
2
(a) 二自由度 (b)三自由度串聯式
(c)三自由度並聯式 (d)三自由度串並聯式 圖 2-1 二自由度與三自由度振動模型種類 (m1:簧下質量,m2:簧上質量,m3:減振質量)
簡單來說,三自由度懸吊模型有三種,分別是串聯式、並聯式、串並聯 式。若三自由串並聯式的 m2、m3之間彈簧係數與阻尼係數為零時,可等效於三 自由度並聯式;若三自由串並聯式的 m1、m2之間的彈簧係數與阻尼係數為零時,
可等效於三自由度串聯式。將三自由串並聯式懸吊的模式作為通用三自由度
12
模型,透過部份參數為零,達到等效於其他兩種懸吊系統。
經線性化假設後,找出二自由度與通用三自由度懸吊的運動方程式,經整理 得到矩陣化方程式。矩陣化方程式以拉普拉斯轉換(Laplace transform),由時域 轉為頻域,最後得到系統轉移函數H(s)。因為系統轉移函數不隨輸入變化,可將 獲得的轉移函數進行頻譜分析,以瞭解到系統在各頻率下激振情況。接著分別在 2-1-1 節、2-1-2 節建立二自由度懸吊與通用三自由度懸吊的運動方程式,且找出 系統轉移函數。
2-1-1 二自由度懸吊之運動方程式
一般型態電動車(Conventional Drive Electric Vehicle, Cond EV)以及輪內馬 達電動車(In-Wheel Drive Electric Vehicle, Iwd EV),其四分之一車模型都為二 自由度懸吊模型。這模型為最簡化之四分之一車振動模型,僅考慮垂直地面 運動。
m
1、m
2分別為簧下質量與簧上質量,絕對位移x
1、x
2,速度x
1、x
2, 加速度x
1、x
2,地面位移為x
0。懸吊中有兩組減振系統,一組為輪胎減振系統,彈簧係數與阻尼係數分別為
k
1、c
1;另一組主懸吊減振系統,彈簧係數與阻尼 係數分別為k
2、c
2。質量、彈簧係數、阻尼係數經簡化,將視為固定值,不隨 位移、時間、速度等變化。圖 2-2 二自由度懸吊圖
二自由度懸吊的運動方程式為一組聯立二階微分方程式,廣義座標為
x
1、x
2,13
且當作系統的輸出位移。
m
1、m
2分別以圖 2-2 二自由度懸吊圖進行動力分析,可得式(2.1)、式(2.2)。
1 1 1
(
1 0)
1(
1 0)
2(
1 2)
2(
1 2) 0
m x + c x − x + k x − x + c x − x + k x − x =
(2.1)2 2 2
(
1 2)
2(
1 2) 0
m x − c x − x − k x − x =
(2.2) 令位移z= [ x
1x
2]
T,則可整理成式(2.3)。1 1 2 2 1 2 2 1 0 1 0
2 2 2 2 2
0 z+ z+ z=
0 0
m c c c k k k k x c x
m c c k k
+ − + − +
− −
(2.3)
整理成MCK(2x2)矩陣方程式可得
[
1 0 1 0]
Mz+Cz+Kz= k x + c x 0
T (2.4)
1 1 2 2 1 2 2
2 2 2 2 2 2
2 2 2 2 2
0 0
m c c c k k k
M C K
m c c k k
× × ×
+ − + −
= = − = −
為了方便在頻域分析,利用拉普拉斯轉換(Laplace transform),將方程式由時 域轉換成頻域。令輸出
Z = L z ( )
、輸入Z
0= L x ( )
0 ,將式(2.4)進行轉換得式(2.5)。1 1
2
(M ) Z0
0
k c s s Cs K Z
+ + + =
(2.5) 將式(2.5)整理成 Z=H(s)Z0的型式,如式(2.6),且令 H(s)為轉移函數。
1 1
2 1
2 1 (M ) Z0
0
k c s Z
×s Cs K
− + = + +
(2.6)
2 1 (M 2 ) 1 1 1 0
k c s H
×s Cs K
− + = + +
(2.7) 從運動方程式式(2.1)、式(2.2),經過 MCK 矩陣化整理,得到轉移函數 H(s) 式(2.7)。
14
2-1-2 三自由度懸吊之運動方程式
三自由度懸吊模型有三種,分別是串聯式、並聯式、串並聯式。若三自由度 串並聯式的m2、m3之間彈簧係數與阻尼係數為零時,可等效於三自由度並聯式;
若三自由度串並聯式的m1、m2之間的彈簧係數與阻尼係數為零時,可等效於三 自由度串聯式。也就是可以將三自由度串並聯式懸吊的模式作為通用三自由度模 型,透過部份參數為零,達到等效於其他兩種懸吊系統。
m
1、m
2、m
3分別為簧下質量、簧上質量與減振質量,絕對位移x
1、x
2、x
3, 速度x
1、x
2、x
3,加速度x
1、x
2、x
3,地面位移與速度為x x 、
0 0。懸吊系統中有 四組減振系統,k
1~ 4、c
1~ 4。質量、彈簧係數、阻尼係數經簡化,將視為固定值,不隨位移、時間、速度等變化。
圖 2-3 通用三自由度懸吊圖
通用三自由度懸吊的運動方程式為一組聯立二階微分方程式,廣義座標為
x
1、x
2、x
3,且當作系統的輸出位移。m
1、m
2、m
3分別以圖 2-3 通用三自由度懸 吊圖進行動力分析,可得式(2.8)、式(2.9)、式(2.10)。1 1 1 1 0 1 1 0
2 1 2 2 1 2 2 1 3 2 1 3
( ) ( )
( ) ( ) ( ) ( ) 0
m x c x x k x x
c x x k x x c x x k x x
+ − + −
+ − + − + − + − =
(2.8)
15
2 2 2
(
1 2)
2(
1 2)
4(
3 2)
4(
3 2) 0
m x − c x − x − k x − x − c x − x − k x − x =
(2.9)3 3 3
(
1 3)
3(
1 3)
4(
3 2)
4(
3 2) 0
m x − c x − x − k x − x + c x − x + k x − x =
(2.10) 令位移z= [ x
1x
2x
3]
T,則可整理成式如下式1 1 2 3 2 3 1 2 3 2 3 1 0 1 0
2 2 2 4 4 2 2 4 4
3 3 4 3 4 3 4 3
0 0
0 0 z+ z+ z= 0
0 0 0
m c c c c c k k k k k k x c x
m c c c c k k k k
m c c c c k k k
+ + − − + + − − +
− + − − + −
− − + − −
… (2.11) 整理成MCK(3x3)矩陣方程式可得
[
1 0 1 0]
Mz+Cz+Kz= k x + c x 0 0
T (2.12)1 1 2 3 2 3 1 2 3 2 3
3 3 2 3 3 2 2 4 4 3 3 2 2 4 4
3 3 4 3 4 3 4 3
0 0
0 0
0 0
m c c c c c k k k k k
M m C c c c c K k k k k
m c c c c k k k
× × ×
+ + − − + + − −
= = − + − = − + −
− − + − −
為了方便在頻域分析,利用拉普拉斯轉換(Laplace transform),將方程式由時 域轉換成頻域。令輸出
Z = L z ( )
、輸入Z
0= L x ( )
0 ,將式(2.12)進行轉換得式 (2.13)。1 1
2
(M ) 0 Z
00 k c s s Cs K Z
+
+ + =
(2.13)
將式(2.13)整理成 Z=H(s)Z0的型式,如式(2.14),且令 H(s)為轉移函數。
1 1
2 1
3 1
(M ) 0 Z
00 k c s Z
×s Cs K
−+
= + +
(2.14)
1 1
2 1
3 1
(M ) 0
0 k c s H
×s Cs K
−+
= + +
(2.15)
從運動方程式式(2.8)、式(2.9)、式(2.10),經過 MCK 矩陣化整理,得到轉移 函數H(s)式(2.15)。若為三自由度並連式懸吊時,k4、c4為零;三自由度串連式懸 吊時,k2、c2為零。透過修正後可得到三自由度懸吊三種不同的轉移函數。
16
2-2 二分之一車懸吊模型
二分之一車懸吊模型較四分之一車,增加車身俯仰角(pitch angle)的觀察,對 於車身上的振動可更加明確,為六自由度模型。同時也可了解輪內馬達電動車 (Iwd EV)、動態減振之輪內馬達電動車(Dynamic vibration absorber of In-Wheel Drive Electric Vehicle, Dva-Iwd EV)前後驅動軸之動力配置差異情況所造成的懸 吊型式的差異,譬如在後置輪內馬達電動車與四驅車的前後懸吊就分成相同與相 異的型式。將四分之一車的通用三自由度懸吊運用在前後輪,如下圖 2-4,簧上 質量(
m
2)前後垂直運動自由度變為對重心的垂直位移(x
2)以及俯仰角(ϕ)自由度,故總自由度仍為六個自由度系統。除前後輪的振動模型仍為線性假設,簧上質量 重心的俯仰角假設為極小,故
tan φ ≅ sin φ φ ≅
。若為一般型態電動車或輪內馬達電動車時,則將
m
f3=m
r3= 。若為前驅且0 具動態減振的輪內馬達電動車則m
r3= 0
,後驅則m
f3 = 。由六自由度系統退化0 為四或五自由度系統。17
圖 2-4 二分之一車系統六自由度振動模型
0 , 0:
f r
x x
前、後輪地面絕對垂直位移,向上為正(unit:m)1 , 1:
f r
x x
前、後輪簧下質量絕對垂直位移,向上為正(unit:m)2 , 2:
f r
x x
前、後絕對垂直位移,向上為正(unit:m)2
:
x
簧上質量重心絕對垂直位移,向上為正(unit:m)φ :
簧上質量俯仰角ccw 為正(pitch angle)(unit:rad)3 , 3:
f r
x x
前、後輪動態減振質量絕對垂直位移,向上為正(unit:m)1 , 1:
f r
m m
前、後輪簧下質量(unit:kg)2
:
m
簧上質量(unit:kg):
Ip
簧上對重心的俯仰角質量慣性矩(unit:kg-m2)3 , 3:
f r
m m
前、後輪動態減振質量(unit:kg)1 , 1:
f r
k k
前、後輪胎彈簧係數(unit:N/m)2 , 2:
f r
k k
前、後主懸吊彈簧係數(unit:N/m)3 , 3:
f r
k k
前、後第二懸吊彈簧係數(unit:N/m)18
4 , 4:
f r
k k
前、後第三懸吊彈簧係數(unit:N/m)1 , 1:
f r
c c
前、後輪胎阻尼係數(unit:N/(m/s))2 , 2:
f r
c c
前、後主懸吊阻尼係數(unit:N/(m/s))3 , 3:
f r
c c
前、後第二懸吊阻尼係數(unit:N/(m/s))4 , 4:
f r
c c
前、後第三懸吊阻尼係數(unit:N/(m/s)) , f , :rLe L L 前後軸距長,簧上質量重心到前輪軸距離,簧上質量重心到後輪軸
距離(unit:m)
首先了解簧上質量(車身)受力分析,得到前後輪給車身的垂直與俯仰方向的 運動方程式。再將前後輪簧下質量以及減振質量的運動方程式與以建立,透過座 標轉換將得到具有簧上重心的位移以及俯仰角,最後可得MCK 矩陣化運動方程 式。下面實施運動方程式推導,前、後主懸吊給簧上質量施力分別為
f
f、 如下f
r2 2 1 2 2 1 4 2 3 2 2 3
2 2 1 2 2 1 4 2 3 4 2 3
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
f f f f f f f f f f f f f
r r r r r r r r r r r r r
f k x x c x x k x x c x x
f k x x c x x k x x c x x
= − − − − − − − −
= − − − − − − − − −
(2.16)簧上質量受力對重心可得垂直加速度以及俯仰角加速度如下(2.17),假設俯仰角 極小。
(cos
φ≈ 1 F L
r rcos
φ= F L
r r)
2 2 f r
p r r f f
m x f f I φ f L f L
= +
= −
(2.17) 前後簧下質量與減振質量的運動方程式為如下式(2.18)19
1 1 1 1 0 1 1 0
3 1 3 3 1 3
2 1 2 2 1 2
1 1 1 1 0 1 1 0
3 1 3 3 1 3
( ) ( )
( ) ( ) ( ) ( )
( ) ( )
( ) ( )
f f f f f f f f
f f f f f f
f f f f f f
r r r r r r r r
r r r r r r
m x k x x c x x
k x x c x x
k x x c x x
m x k x x c x x k x x c x x
= − − − −
− − − −
− − − −
= − − − −
− − − −
2 1 2 2 1 2
3 3 3 3 1 3 3 1
4 3 2 4 3 2
3 3 3 3 1 3 3 1
4 3 2 4 3 2
( ) ( )
( ) ( )
( ) ( )
( ) ( )
( ) ( )
r r r r r r
f f f f f f f f
f f f f f f
r r r r r r r r
r r r r r r
k x x c x x
m x k x x c x x
k x x c x x
m x k x x c x x
k x x c x x
− − − −
= − − − −
− − − −
= − − − −
− − − −
(2.18)
前後輪對簧上的位移
x
f、2x
r2可轉換得簧上重心垂直位移與俯仰角2 2
2 2
2
f r
r f
r f f r
r f
x x L L L x L x
x L L
φ
− + =
+
= +
+
(2.19)
利用拉普拉斯轉換(Laplace transform)將輸入路面位移與輸出位移進行轉換,其他 未註明將以大寫作為轉換標示。
0 0 1 1 2 2 3 3
0 0 1 1 2 2 3 3
2 2
( ) , ( ) , ( ) , ( )
( ) , ( ) , ( ) , ( )
( ) , ( )
f f f f f f f f
r r r r r r r r
Z L x Z L x Z L x Z L x
Z L x Z L x Z L x Z L x
Z L x L
φ= = = =
= = = =
= Φ =
式(2.16)經 Laplace transform 並矩陣化
20
1
1
3
2 4 2 4
3
2 4 2 4
2
2
1
1
3
2 4 2 4
3
2 4 2 4
2
2
0 0 0
0 0 0
0 0 0
0 0 0
f
r
f f f f f f
r
r r r r
r
f
r
f
r
f
f f f f
r
r r r r
f
r
Z Z
F c c c c Z
s c c c c Z
F
Z Z Z Z
k k k k Z
Z
k k k k
Z Z
− −
=
− −
− −
+ − −
[ ]
1 1 3 3 2 2
T T
f r f r f f u s
Z Z Z Z Z Z Z Z
=
[
21 22] [
21 22]
f u u
s s
r
F Z Z
s C C K K
Z Z
F
′ ′ ′ ′
= +
(2.20) 式(2.17)經 Laplace transform 並矩陣化得
2 2
2 0 1 1
0
f
p f r r
F
m Z
s I L L F
=
Φ −
(2.21) 將式(2.20)代入式(2.21)得
[ ] [ ]
2 2
2
21 22 21 22
0 1 1 1 1
0 0
u u
p f r s f r s
m Z Z Z
s s C C K K
I L L Z L L Z
′ ′ ′ ′
− − =
Φ − −
[ ] [ ]
2 2
22 21 22 u 21 22 u 0
s s
Z Z
s M Z s C C K K
Z Z
− − =
Φ
(2.22) 式(2.18)經 Laplace transform 並矩陣化得
21
1 1
1 1
2
3 3
3 3
1 2 3 3 1 2
1 2 3 3 1 2 2
3 3 4 3 4 2
3 3 4 3 4
1
0 0 0
0 0 0
0 0 0
0 0 0
f f
r r
f f
r r
f f f f f f
r r r r r r f
f f f f f r
r r r r r
f
m Z
m Z
s m Z
m Z
c c c c Z c
c c c c Z c Z
s s
c c c Z c Z
c c c Z c
k k
+ + − −
+ + − −
+ − + + −
− + −
+ +
2 3 3 1 2
1 2 3 3 1 2 2
3 3 4 3 4 2
3 3 4 3 4
1 1
0
1 1
0
0 0 0
0 0 0
0 0 0
0 0 0
0 0
0 0
0 0
f f f f f
r r r r r r f
f f f f f r
r r r r r
f f
f
r r
r
k k Z k
k k k k Z k Z
k k k Z k Z
k k k Z k
k c s
Z k c s
Z
+ − −
+ + − −
+
− + −
− + −
+
+
=
簡化
[ ] [ ] [ ]
2
11 0 u 11 12 u 11 12 u input
s s s
Z Z Z
s M s C C K K F
Z Z Z
+ + =
(2.23)
1 1
1 1 0 (4*1)
0
0 0
0 0
0 0
f f
f
r r
input
r
k c s
Z k c s
F Z
+
+
=
式(2.19)經 Laplace transform 並矩陣化得
3 3
3 3
f r
r f
r f f r
g
r f
Z Z L L L Z L Z
Z L L
− +
Φ =
+
= +
+
22
1 1
1 1
3 3
3 3
2 2
2
1 0 0 0 0 0
0 1 0 0 0 0
0 0 1 0 0 0
0 0 0 1 0 0 0
Z= 0
0 0 0 0
1 1
0 0 0 0
f f
r r
f
f u
f r
r r s
r f r f f
r
r f r f
Z Z Z Z
Z Z I Z
L Z
Z L r Z
L L L L Z
Z
Z
L L L L
φ
=
+ +
−
+ +
=
1
0 0
=inv Z=
0 0
u
s
Z I I
Z RZ
Z r r
−
=
(2.24) 經整理式(2.22)、式(2.23),並代入(2.24)可得 MCK 系統模型
[ ] [ ] [ ]
[ ] [ ]
2
11 4*6 11 12 4*6 11 12 4*6 (4*1)
6*1 6*1 6*1
2 2
22 21 22 21 22
0
0
u u u
input
s s s
u u
s s
Z Z Z
s M s C C K K F
Z Z Z
Z Z
s M Z s C C K K
Z Z
+ + =
− − =
Φ
[ ] [ ] [ ]
[ ] [ ] [ ]
2
11 4*6 11 12 4*6 11 12 4*7 (4*1)
2
22 2*6 21 22 21 22
0
0 0
input
s M RZ s C C RZ K K RZ F
s M Z s C C RZ K K RZ
+ + =
− − =
11 11 12 11 12
2
22 21 22 21 22
0
0 0
input
M C C K K F
s Z s RZ RZ
M C C K K
+ − − +− − =
令 6 6 11 6 6 11 12 6 6 11 12
22 21 22 21 22
0 C = K =
0
M C C K K
M R R
M C C K K
× × ×
= 、 − − 、 − −
得( 2 )
0
input
Ms Cs K Z
F
+ + =
(
M 2 C K)
1F
input0Z s s
− = + +
(2.25)
在此已完成二分之一車的運動方程式推導成MCK(6x6)矩陣系統,其相關 M、C、
K 矩陣可參考附錄 A。
23
當輸入之相位有特性關係時,車身振動之垂直運動及俯仰運動,會有不同性 質。當前後輪路面輸入為同相位時,即
Z
f0=Z ,此時車身重心垂直位移最大,
r0 俯仰角位移最小,稱為跳動(bounce)模式。若為相差半個週期,即Z
f0= −Z
r0, 此時與跳動模式正好相反,車身重心垂直振動位移最小,俯仰角位移最大,稱之 為俯仰(pitch)模式。一般車輛走行時,前後輪輸入路面相同僅只有時間差,稱之 為走行模式。以下將分別說明三種模式的轉移移函數:1. 跳動模式時,
Z
0 =Z
f0Z
r0T =Z
f0[ ]
1 1T,並令Z
=H Z
v f0,推得跳動模 式下的轉移函數H
v。1 1 1 1 0 0
0 T 0 0 0 0 T
input f f r r f v f
F k c s k c s Z Q Z
= + + =
(
M 2 C K)
1 v f0 v f0Z
=s
+s
+ −Q Z
=H Z
(
M 2 C K)
1v v
H
=s
+s
+ −Q
(2.26) 2. 當俯仰模式時,Z
0 =Z
f0Z
r0T =Z
f0[
1 −1]
T,並令Z
=H Z
p f0,推得俯仰模式下的轉移函數
H 。
p1 1 1 1 0 0
0 T 0 0 0 0 T
input f f r r f p f
F k c s k c s Z Q Z
= + − − =
(
M 2 C K)
1 p f0 p f0Z
=s
+s
+ −Q Z
=H Z
(
M 2 C K)
1p p
H
=s
+s
+ −Q
(2.27) 3. 走行模式時,前後輪輸入路面時間差(td),與軸距長度(Le)及車速(V)有關,且車速假設為定速。
d
/
t = Le V
(2.28)d