行政院國家科學委員會專題研究計畫 成果報告
在一般環境下之與機器互動智慧系統研發 研究成果報告(精簡版)
計 畫 類 別 : 整合型
計 畫 編 號 : NSC 100-2221-E-011-050-
執 行 期 間 : 100 年 08 月 01 日至 101 年 07 月 31 日 執 行 單 位 : 國立臺灣科技大學電機工程系
計 畫 主 持 人 : 蘇順豐
計畫參與人員: 學士級-專任助理人員:邱詩評
碩士班研究生-兼任助理人員:曾曉平 碩士班研究生-兼任助理人員:莊崴丞 碩士班研究生-兼任助理人員:詹彧彬 碩士班研究生-兼任助理人員:羅聖傑 碩士班研究生-兼任助理人員:盧以凱 碩士班研究生-兼任助理人員:周祐任 碩士班研究生-兼任助理人員:樓昊 碩士班研究生-兼任助理人員:王科傑 大專生-兼任助理人員:劉冠鷹
博士班研究生-兼任助理人員:葉人瑋
報 告 附 件 : 出席國際會議研究心得報告及發表論文
公 開 資 訊 : 本計畫可公開查詢
中 華 民 國 101 年 10 月 29 日
中 文 摘 要 : 本篇論文將提出一個能夠跨平台、容易建置、且融合了類似 雲端運算的概念的智慧家庭系統,讓行動不便者能夠隨時隨 地使用行動裝置去遠端操控家庭中的設備及各項服務。當設 備或服務的狀態改變時,同時將相關訊息回應到整個家庭環 境中,即時地給予行動不便者回饋。另外藉由記錄行動不便 者的生活習慣,並動態產生新的服務。為了實現以上的論 點,本論文建構一個基於 UPnP 及 OSGi 上的系統,提供了可 靠、具動態擴充性、且易於存取及管理的智慧家庭環境。此 外藉由 OSGi framework 嵌入進 web server 及 servlet contianer 中,讓我們不但能夠使用 JSP(Java Server Page) 及 servlet 技術開發智慧家庭管理介面,並且能夠讓管理介 面能夠和 OSGi framework 做溝通,進而管理 OSGi
framework 上的 bundle,配合資料庫,建構一個能遠端管理 的智慧家庭網頁控制平台。此外,為了讓行動不便者可以簡 單操控家庭中的設備,行動不便者可以不需要藉由手來推動 輪椅或是觸碰任何家中的設備。一般的手勢辨識相關文獻只 探討如何提高手勢辨識的精準度,在本篇論文,將會討論如 何在動態背景下去處理我們的影像,以及在複雜的背景下擷 取出完整的手勢前景。根據這些規則,我們可以打造一個以 規則為基礎的情境感知環境,讓行動不便者不用做複雜的設 定,即可取得想要的服務。
中文關鍵詞: 智慧家庭、OSGi、UPnP、JSP。
英 文 摘 要 : This study attempts to build an easy-to-install
cross-platform smart home environment incorporating a concept similar to cloud computing, which allows users, especially those who are less mobile, to readily remote control home facilities and service modes available, using mobile devices close at hand.
Whenever there is a change in any facility or service mode, relevant message will be reflected in the smart home environment, which in turn is transmitted in a real time manner to the less mobile users, thus dynamically providing them with appropriate up-dated services. To embody the said concept, this paper establishes a simulated environment based on UPnP and OSGi, thus making possible a smart home environment that is reliable, dynamically expandable and easy to access/retrieval, and effectively manageable.
Besides, embedding the OSGi framework into the web server and servlet container enables us not only to
use JSP (Java Server Page) and servlet to construct management interface in the smart home environment, but also to facilitate communication between the management interface and the OSGi framework, which in turn effectively manages the bundles in the OSGi framework, thus making possible the construct of a smart home website-controlled platform supported by relevant data banks. In addition, users of limited mobility can easily and readily access smart home facilities simply by gestures, not having to turn to a wheel chair or hand touch for help. Unlike those studies that focus mainly on the accuracy enhancement of hand gesture recognition, this study explores how images are processed in a complex dynamic background as well as how to retrieve a complete prospect for hand gestures and their interpretations. In the light of these rules and mechanisms, a rule-based context- aware perceptive environment is constructed which allows the users of limited mobility to obtain desired services without having to resort to a complex set of pre-setting operations.
英文關鍵詞: Smart home, OSGi, UPnP, Context aware, Web console, Servlet, JSP, dynamic service, dynamic rule.
行政院國家科學委員會補助專題研究計畫 □期中進度報告
■期末報告
在一般環境下之與機器互動智慧系統研發
計畫類別:■個別型計畫 □整合型計畫 計畫編號:NSC 100-2221-E-011-050-
執行期間:100 年 08 月 01 日至 101 年 07 月 31 日 執行機構及系所:國立臺灣科技大學 電機工程系
計畫主持人:蘇順豐 共同主持人:
計畫參與人員:葉人瑋、曾曉平、詹彧彬、莊崴丞、羅聖傑 盧以凱、周祐任、樓 昊、王科傑、劉冠鷹
本計畫除繳交成果報告外,另含下列出國報告,共 2 份:
□移地研究心得報告
■出席國際學術會議心得報告
□國際合作研究計畫國外研究報告
處理方式:除列管計畫及下列情形者外,得立即公開查詢
□涉及專利或其他智慧財產權,□一年□二年後可公開查詢
中 華 民 國 101 年 10 月 24 日
中文摘要
本篇論文將提出一個能夠跨平台、容易建置、且融合了類似雲端運算的概念的智慧家庭系統,讓 行動不便者能夠隨時隨地使用行動裝置去遠端操控家庭中的設備及各項服務。當設備或服務的狀態改 變時,同時將相關訊息回應到整個家庭環境中,即時地給予行動不便者回饋。另外藉由記錄行動不便
者的生活習慣,並動態產生新的服務。為了實現以上的論點,本論文建構一個基於UPnP 及 OSGi 上的
系統,提供了可靠、具動態擴充性、且易於存取及管理的智慧家庭環境。此外藉由OSGi framework 嵌
入進web server 及 servlet contianer 中,讓我們不但能夠使用 JSP(Java Server Page)及 servlet 技術開發智 慧家庭管理介面,並且能夠讓管理介面能夠和OSGi framework 做溝通,進而管理 OSGi framework 上
的 bundle,配合資料庫,建構一個能遠端管理的智慧家庭網頁控制平台。此外,為了讓行動不便者可
以簡單操控家庭中的設備,行動不便者可以不需要藉由手來推動輪椅或是觸碰任何家中的設備。一般 的手勢辨識相關文獻只探討如何提高手勢辨識的精準度,在本篇論文,將會討論如何在動態背景下去 處理我們的影像,以及在複雜的背景下擷取出完整的手勢前景。根據這些規則,我們可以打造一個以 規則為基礎的情境感知環境,讓行動不便者不用做複雜的設定,即可取得想要的服務。
關鍵詞: 智慧家庭、OSGi、UPnP、JSP。
英文摘要
This study attempts to build an easy-to-install cross-platform smart home environment incorporating a concept similar to cloud computing, which allows users, especially those who are less mobile, to readily remote control home facilities and service modes available, using mobile devices close at hand. Whenever there is a change in any facility or service mode, relevant message will be reflected in the smart home environment, which in turn is transmitted in a real time manner to the less mobile users, thus dynamically providing them with appropriate up-dated services. To embody the said concept, this paper establishes a simulated environment based on UPnP and OSGi, thus making possible a smart home environment that is reliable, dynamically expandable and easy to access/retrieval, and effectively manageable. Besides, embedding the OSGi framework into the web server and servlet container enables us not only to use JSP (Java Server Page) and servlet to construct management interface in the smart home environment, but also to facilitate communication between the management interface and the OSGi framework, which in turn effectively manages the bundles in the OSGi framework, thus making possible the construct of a smart home website-controlled platform supported by relevant data banks. In addition, users of limited mobility can easily and readily access smart home facilities simply by gestures, not having to turn to a wheel chair or hand touch for help. Unlike those studies that focus mainly on the accuracy enhancement of hand gesture recognition, this study explores how images are processed in a complex dynamic background as well as how to retrieve a complete prospect for hand gestures and their interpretations. In the light of these rules and mechanisms, a rule-based context-aware perceptive environment is constructed which allows the users of limited mobility to obtain desired services without having to resort to a complex set of pre-setting operations.
Keywords: Smart home, OSGi, UPnP, Context aware, Web console, Servlet, JSP, dynamic service, dynamic rule.
I. Introduction
The relevant work of the smart home has already been studied for several years and such research contained a lot of themes. In [1], the author proposed a concept to construct a smart home system consisting of a main system, the man-machine interface, a simulator, control devices, and smart objects. Therefore, this study integrated all of those subsystems into a smart home system by transforming different transmission forms into the same one. The system can respond properly when those objects change states and uses an interface to edit the contents of the system. In [2], they constructed a smart home system based on OSGi which called "MyHome". Moreover, the system can integrate lots of modules, such as the GPS module, position module, alarm module, GUI module, etc, by the plug-and-play feature of the OSGi framework. These modules communicate each other by a MOM system. In [3], they developed an UPnP AV architectural multimedia system with a home gateway on the OSGi platform. According to these features, the user does not need to make lots of complex steps to build a smart home environment. In our study, a smart home system is build by integrating the OSGi framework, the UPnP standard, web consoles, and rule-based context awareness applications. In our study, we hope to construct a simple, convenient, and robust interface to help users to manage devices in a smart home environment. We adopt a web console to manage devices in a smart home environment. Besides, this interface also can manage bundles on the OSGi framework.
Another research topic is a hand gesture recognition system. The hand gesture recognition system proposed in our study is aimed at being used for the situation that no accompany at home but users on a wheelchair and a micro processor and a webcam is hung on the top of back of a chair. The structure is shown in Fig. 1. Traditional hand gesture studies are to consider hand gestures appearing in a static state or with a simple background. Thus, it is easy to extract the hand from such a scenario. Once the background becomes more complicated, there will exist skin-color noises around the hand to be recognized and it may make the recognition fail. In addition, traditional studies put more focus on how to increase the gesture recognition rate, such as using some ways of building large database and analyzing hand gesture, but we hope to process hand gesture in more complicated environments or dynamic backgrounds. In this study, the system is to extract a hand image from a complicated background. A new idea will be proposed in this study. It should be noted that the wheelchair may move in the process. Thus, it is impossible to use background subtraction only to extract the hand. The skin color threshold is considered in our implementation. As suggested in the literature, the YCbCr color space is considered. In our implementation, in order to avoid wasting time for processing useless images, a concept of region of interest (ROI) is introduced to trigger when the system start to work in our approach. With certain image process techniques, although some foreground noises can be removed, some skin-color- like noise may be still there. Thus, in this study the concept of Robust Learning Algorithms loss functions [4] is employed to define a way of discrimination between the hand image and other skin-color like object images. Finally, we can extract completely the hand from the frame and use a usual way [5] of segmenting the hand into the palm.
II. OSGi-based Web Console for Smart Home with Dynamic Service Registration
This study combines the UPnP standard and the OSGi framework to build a core of the smart home environment. A web console is employed to display and to manage the home status and devices. Another feature is the context awareness concept for providing appropriate services for users in the smart home environment when the environment senses a context from any sensor. They are four parts in the system. We
will describe the architecture and design of our smart home environment.
Fig. 1 Structure of the hand gesture recognition system
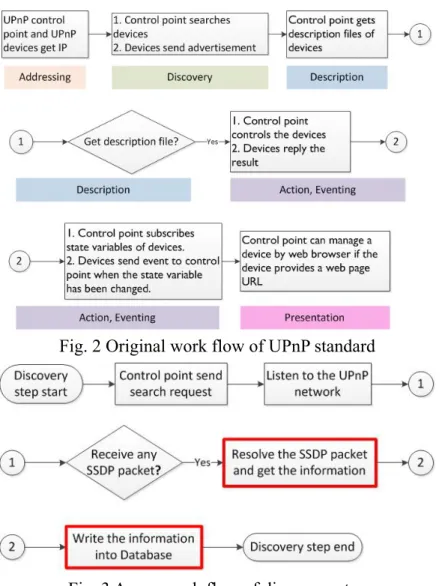
This study implements UPnP devices and control points based on the Felix UPnP project which can provide an implementation of the OSGi UPnP specification as described in the OSGi Service Compendium (Release 4), and this project is an open source project. The original working flow of the UPnP standard is shown as Fig. 2. An UPnP control point and UPnP devices get an IP address in the addressing step. When this step is finished, the UPnP control point will search requests to find interesting devices in the UPnP network.
Similarly, the UPnP will create a message when a device is newly added to the network. These work processes are called the "Discovery" step. The next step is the description step. In this step, the control point will get description files of devices according to the IP address which is gotten in the discovery step. If the control point gets a description file of a device, it can control the device. The control point can send control message to change the device's status, and the device will reply a result to the control point. This step is called
"Action". The control point also can subscribe a service of a device. As soon as a state variable of the service is changed, the device will notify the control point. This step is called "Eventing". The "Presentation" means the UPnP device may provide an URL for managing it on a web page interface. This step is optional. When the UPnP control point and UPnP devices is started, the smart home system will initialize the database and check whether the database is initialized successfully. We also make some changes in the discovery step and the new working flow is shown in Fig. 2. The discovery step works by transmitting a SSDP (Simple Service Discovery Protocol) packet which contains device IP, device type, device UUID, address of description file, etc. The system has to resolve the SSDP packet and then get the information it needs.
When the UPnP control point and UPnP devices have been started, the smart home system will initialize the database and check whether the database is initialized successfully. We also make some changes in the discovery step and the new work flow is shown in Fig. 3. The discovery step work by transmitting a SSDP (Simple Service Discovery Protocol) packet which contains device IP, device type, device UUID, address of description file, etc. The system has to first resolve the SSDP packet and then get the information it need.
Fig. 2 Original work flow of UPnP standard
Fig. 3 A new work flow of discovery step
When a user triggers an event, the smart home environment will add a log in the event cache which is also a web console and record the event's information into a database. An event will occur when a user enters another room from the living room, turn on a light, turn on TV, etc. After recording the events' information into database and adding logs in the event cache, a user can choose which event he wants to be a rule in the smart home environment. When a user decides which events he wants to be a rule, the events the user selected will be written into the database and also register the properties in the smart home environment. These selected events can be merged to be a dynamic rule. And the dynamic rule can be referred by context awareness computing. These dynamic rules can provide dynamic service for users in a smart home environment.
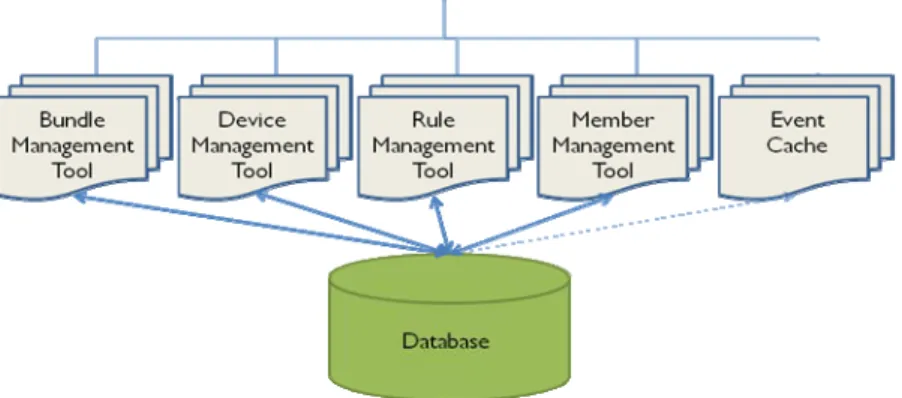
The web console is an interface for managing a smart home environment. The web console consists of many management tools. In our implementation, there are the bundles management tool, the device management tool, the device management tool, the rule management tool, and event cache, etc. All of them are programmed by a set of HTML, CSS, Javascript, JSP and servlet and they will access information from the database. We will introduce every part of the web console in following and the structure of the web console is shown in Fig. 4.
Fig. 4 Structure of web console
Bundle Management Tool: The bundle management tool is used to manage bundles in a smart home environment under the web console. It can make people manage the bundles in the OSGi framework more easily by the web console instead of by command lines. This tool shows the bundle's name, bundle's ID, bundle's version, bundle's status, and some buttons to control a bundle's status.
Device Management Tool: This tool is to provide the web console to manage UPnP devices in a smart home. Through the working process of the UPnP standard layer, there are already a lot of UPnP device information in the database. By this tool, the system can manipulate any UPnP devices anytime and anywhere, and by any mobile devices which can browse web pages. A device management tool shows device's UUID, friendly name, location, and status (online or offline). When clicking the hyperlink of device, there is interface for controlling this device.
Member Management Tool: The function of the member management tool is to monitor the member in a smart home environment and edit the data of a member. This function is like the member field in a website.
Rule Management Tool: The rule management tool provides an interface to make user can monitor or edit rules in a smart home environment dynamically. This tool shows rule ID, who conform this rule, when this rule conformed, where this rule conformed, what event occur make this rule conformed and what action should be done if all conditions are conformed.
Event Cache: The event cache records events which occur in a short time. The default time interval is set one day. In this interface, users can not only monitor events but also can select some events to be a new rule just by checking an event.
The database is the most important part in the smart home environment because all of information of the smart home environment is stored here. A well-designed database structure can make the smart home work powerfully and efficiently. In this section, we will introduce database structure in a smart home environment.
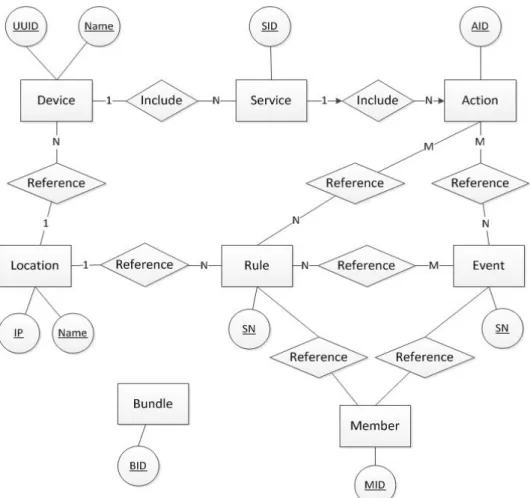
The ER model and structure of whole database is shown in Fig. 5.
Device Table: This table is used to store the UPnP devices' information which is gotten by control point in the smart home.
Service Table: A service is included by a device. The service table store services of an UPnP device which contain in description file. Those services include a set of actions, state variables, and arguments.
Action Table: The action table records the actions of an UPnP device. When people use web console to manage UPnP devices, the actions in this device are listed.
Rule Table: The rule table is used to store the dynamic rule information which contains some condition
just like who, when, and where [2] to check whether use this rule or not. The rule can be separate into two categories. It is dynamic generated by combining some events of event cache. And the other one is normal rule, it is can be generated by using rule manage tool. And the dynamic rule will always reference some events, but the normal rule is not sure to reference to an event.
Bundle Table: We use the bundle table to save a bundle's data just like the bundle id, bundle name, bundle status, etc. This table is referenced by the bundle manage tool in web console to show the bundle management interface.
Event Table: The event table is used to log the any occurred event in the smart home environment. The event can be separate into two categories. One is the device event, whatever UPnP device is triggered, it is considered a device event. The other categories are the location event. When someone enter or leave a location, it will occur in a location event.
Location Table: The location in our smart home environment is recognized by IP, and this concept is reference the DHCP. We can assume that every location in the smart home have a device can provide the DHCP service just like a router and we can map a location to the unique IP. The server will know this UPnP device come from which location.
Dynamic Service Table: This table is used to record the dynamic service's properties and this table will be loaded just once when a system start. The service will be registered in the OSGi framework from database. If the system has been terminate, the properties of dynamic service will be restored in the database.
Member Table: This table provides a reference to make smart home can recognize who trigger event.
Fig. 5 Structure and ER model of smart home database
III. Hand Gesture Recognition System
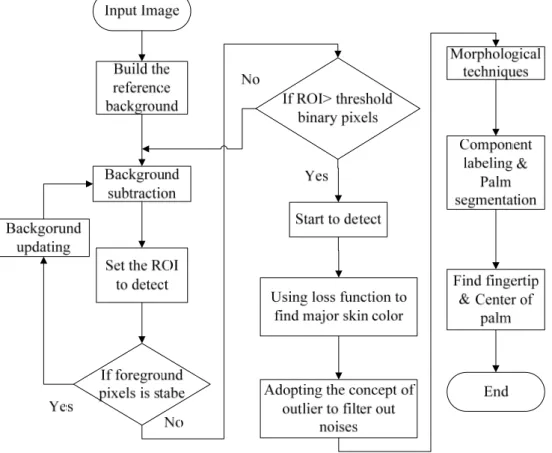
This study proposes to use fingertips to guide the wheelchair on task. In other words, we consider how to extract the hand from complicated background that is the concern of this study. Fig. 6 is the flowchart of the whole system. The system consists of five steps. The first step is to build the background from the video stream and extract the foreground of a hand by background subtraction. The second is to set up a ROI whether the pixels of foreground reaches the threshold so that the system can start to detect. In third, in order to get the complete hand, the loss functions of robust learning algorithms and the concept of outlier is adopted to filter off the skin-color-like noises in the background. Finally, the fourth step is to segment the hand to detect the palm and find the fingertip to implement in our system.
Fig. 6 Flowchart of whole system
3.1 Detection of the Appearance of Hands
In order to reduce the influence of the environment, the background is build before the user’s hand appears in front of camera view. The system takes K frames from the static gray background images without the appearance of a hand, and then it computes the mean of them to be the reference background. The formulas are described as follow.
1
( , ) 1
k i( , )
i
B x y b x y
K
(1)where ( , )
b x y presents the i
i th frame that is extracted from background image and ( , )B x y presents the
reference background. As mentioned, background subtraction is adopted in this system to extract the foreground of hand. Every frame captured from the camera is transformed into gray images and thencompares with reference background. The background subtraction operation is 1 ( , ) ( , ) ( , )
0
if I x y
kB x y TH Diff x y
otherwise
(2)
where
I x y presents the current gray frame,
k( , )Diff x y presents the output of binary image and TH
( , ) presents the threshold. If the differential image is more than TH , it is considered as the foreground.As mentioned earlier, the webcam is used in this system to capture the hand gesture. Thus, the environment is moving unless the wheelchair is static. Therefore, when the movement of user’s hand is detected, the problem is that the movement of dynamic background and foreground may produce lots of noises. In order to incorporate possible variance of the environment, a way of updating the background image is considered. In our study, a background updating algorithm [7] is employed and the equation is given by
B x y ,
I x y , 1
B x y ,
(3) where represent the updating rate which is restricted in interval [0,1] . If the parameter is too large, the foreground object will be quickly updated in the background image.Fig. 7 is the variation in foreground pixels when the hand passes through the view of camera in the ROI area. The x-axis represents the time domain. The y-axis represents the variation in foreground pixels. By observing Fig. 7, the difference in number of foreground pixels between frames is slight variations before the hand uplifts which is marked by the region of red line. The equation is given by
update,
background 1 && , 0,1,..., does not update,
v u
if abs f t j f t j T f t T j N
otherwise
(4)
where
f t
denotes number of foreground pixels. BothT and
vT are predefine threshold. j represents
u the observed number of frame. If the variations between frames maintain stable value for a long time and the number of foreground pixels is smaller than the predefine threshold, the background image will be updated.Fig. 7 Variation in number of foreground pixels
3.2 Segmentation of Hand Regions and Robust Skin Color Detection
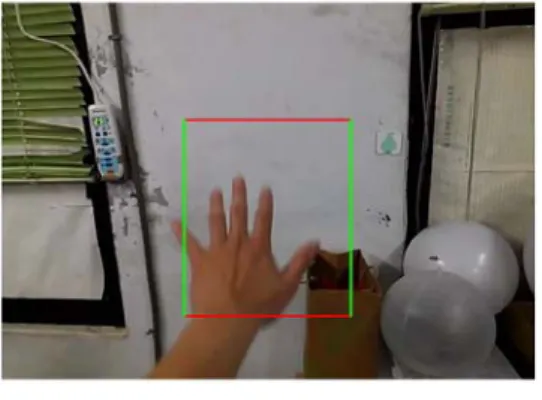
The ROI area that is set in the middle of camera as shown in Fig. 8. Because from the arm to the palm that is long shape, we set a rectangle that range is the location of x direction from 220 to 420, the location of y direction is from 150 to 400. Both of the top and the bottom, presenting the red line, the two sides are presented the green line in this ROI area.
Fig. 8 ROI area
As mentioned above, once the foreground of hand appears in the ROI area, it is observed to find the palm which will be located in the ROI. Therefore, we don’t obtain whole hand to be detecting foreground, setting a threshold to stop detection when the pixels of foreground achieves one-third of ROI area (total pixel is 50000), the red line presents that the pixel is more than 17000 in 117th frame. In addition, we adopt from loss function of robust learning algorithms to filter the sin-color-like noises of neighboring hand. Thus, the result will be more robust than simple skin detection.
In this section, we discuss the relationship of CbC r and to compute the majority group of skin color. After that, we will use a approach called Robust Learning loss function to ensure our middle point is located on hand of skin color(majority), and then obtain the concept of outlier to discriminate the majority skin color from other minority skin color.
There are some noises color is similar to the hand region, so this study adopts in the concept of outlier from statistics to remove noises connecting to the hand region. In statistics, the term “outlier” is used to represent an observation that is numerically “distant” from the rest of the data [8].
3.3 Segmentation of Full Palm
In this study, we propose to guide the wheelchair to move such as go forward, stop and turn. The behavior is like that hand raises from the bottom to the middle of frame and waves it. Therefore, this study only concern about the lower half of frame. Firstly, we compute the centroid of foreground as follows.
0 k
i c i
x
x k
, 0
k i c i
y
y k
(5) Where xi
and y
i are x and y coordinates of ith pixel in the hand region, and k denotes the number of pixels in the region. According to reference [3], we consider the boundary of frame to assist to segment the palm. In the algorithm, the edges of an image are separated into 4 line segments, namely a, b, c, and d as shown in Fig. 9.No matter what direction of rising hand when the hand appears in front of camera, it should exist on the edge of boundary. If hand appears from the bottom of frame, then white pixels should in the line a. If hand
appears from bottom left, white pixels should in the line a or b. If hand appears from bottom right, white pixels should in the line a or c. If any white pixels exist in line d, it can be ignored due to violating the ergonomic. If there are not any white pixels in line a ,b ,c, then it means that the user wears a long sleeve and the palm is definitely completely inside the image. Hence, hand gesture recognition will be performed.
Fig. 9 Dividing the edge of the image into 4 line segments [3]
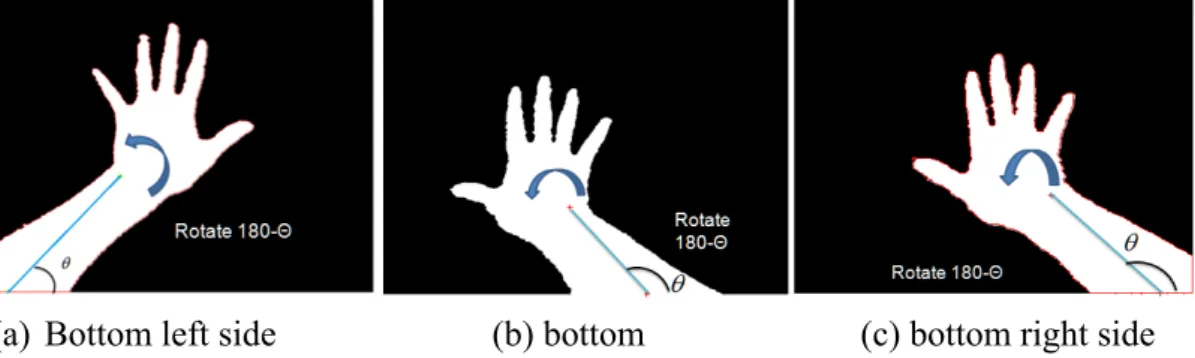
As mentioned above, once the white pixels exist any line, we can find the direction of rising hand. In addition, we compute the location that is the middle of white pixels along the edge a, b, c. That is set to be another point (xm , ym). It connects to the centroid of hand (xc , yc). According to the line, we can rotate the hand region to the horizontal direction as shown in Fig. 10.
Fig. 10 Considering hand to segment
After finding the two points like Fig. 10, we adopt the concept of [9] to rotate our hand. Since a hand may show up in the field of the camera view from various angles, we need to obtain the angle of the hand.
This angle θ is obtained as
1
( )
tan ( )
c m
c m
y y x x
(6) where xc and yc are the coordinates of the centroid of hand, xm and ym are the coordinates of the middle of foreground pixels along the edges. Now that the angle θ is acquired, the next step is to rotate the reaching hand to the same orientation. Because the arm region could locates in different side such as, bottom right, bottom left, and bottom, according to the different direction, we rotate the image by counter-clockwise direction as shown in Fig. 11. In order to separate the palm region and arm region, we rotate an example to the horizontal direction, and then the vertical projection approach [9] is employed to the rotated image as shown in Fig. 12.(a) Bottom left side (b) bottom (c) bottom right side
Fig. 11 Example of calculating the angle of the reaching hand
(a) (b) Fig. 12 Example after rotating
(a) Considering image Rotated by θ, (b) Vertical projection of (a)
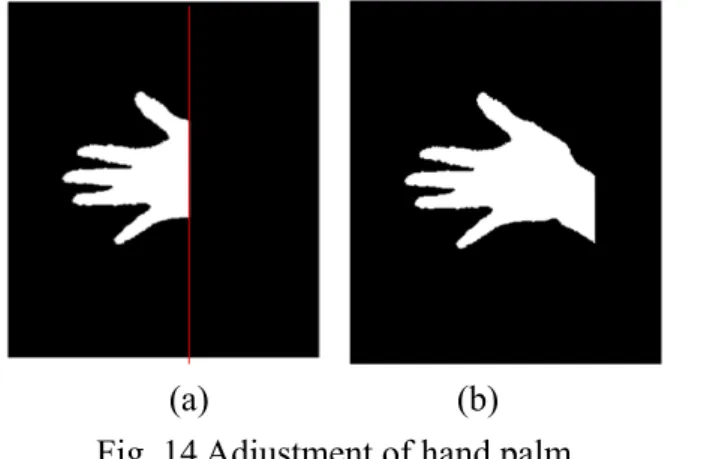
As mentioned above, we have succeeded to rotate hand region to the horizontal direction. In this study, the segmentation of palm [5] is employed again to separate the palm and the arm. First, we compute the sum pixels of vertical projection from left to right. Therefore, the length of hand is found from Fig. 12(b). However, the amount of column skin-color white pixels of arm region is sometimes more than that of the palm region, so if only use the middle line of hand region as wrist line, the palm part may be cut more. In approach [5]
proposed a method to compromise, regarding the maximum sum pixels of vertical projection as the start line
l
max, and the middle of hand region as end line lmid. According to the range, we set the wrist line which is the minimum sum pixels within the range as shown in Fig. 13. Therefore, after finding out the location of the wrist line, the length of the palm region lp is calculated. Instead of removing the area to the right of the wrist line, the area in the right-hand side of the wrist line plus lp/3 are removed. Fig. 13 of applying this idea is shown in Fig. 14.Fig. 13 Range of wrist line locates
(a) (b) Fig. 14 Adjustment of hand palm
(a)The wrist line found from Fig.12, (b) arm removal by adding the condition lp/3
3.4 Hand Gesture Recognition
In our study, after the palm region is segmented from the background and filtered by the algorithm proposed in above sections, the palm will be used in the system. In order to find the fingertip to guide the wheelchair, we have to know the amount of fingers. According to everyone’s habit is different, it is not surely to decide how many fingers will be shown in front of camera. E.J. Holden al et. [10] proposed a method that the hand of the binary image will be transformed into a polar image for recognition. Polar hand image is a popular method of recognizing hand gestures due to its scale, translation and rotation invariance [11]. As mentioned above, after the palm is obtained, we should restart to compute the centroid of foreground, using the center of gravity of palm to be the center of a circle and like the radar’s scanning way to scan the whole image as shown in Fig. 15(a), the circle radius of every angle is slowly increase from 0。 to 360。, if scan the hand region, recording the point whose angle and its distance until the center of gravity; Until scan no any blocks of hand, it means that the system have found the contour of hand, keeping recording the next angle and distance as shown in Fig. 15 (b).
(a) (b)
Fig. 15 A binary image transforming into a polar image
According to the idea Fig. 15(b), we can observe that there are many peaks. Therefore, we set the threshold to discriminate fingers from the palm. If the threshold is too low, some peaks will be included, or if the threshold is too high, the system cannot detect any fingers. In this study, we adopt a rule [10] to determine whether the distance per angle is higher than the threshold in polar image as
max min min
( ) 0.6
S
th R
R
R
(7)where
R presents the maximum distance and
maxR presents the minimum. If the arm is included in the
min chosen gesture, the peak transformed from arm is may higher than threshold. Therefore, we set the width of peak to decide whether it is finger or arm.10 W
peak 35
(8) By all of above approaches, it is could completely extracted the palm and count the number of raised fingers. In our system, we want to use the finger to guide the wheelchair. Therefore, the fingertips of raised fingers used to control the wheelchair. According to above threshold approach, we can obtained easily the numbers of fingers. Following that, every angle corresponds different distance from the centroid of palm in polar image. Actually, after we obtain the contour of palm, every point location of contour is also computed at the same time. Therefore, we start to find every peak of finger which is between every trough in the polar image as shown in Fig. 16(a).
(a) (b) Fig. 16 Finding fingertips by polar image
Because user guides the direction of wheelchair by his/her fingertips, we shall choose the middle of all of fingers to be the reference point in this system. In addition, we connect the fingertip points to the centroid of palm, that is going to be the direction in our system as shown in Fig. 17. Even if the number of fingers is even, we can compute the median of the amount of finger such two, four fingers. The result is shown in Fig. 18.
Fig. 17 Direction of fingertip
(a) (b) Fig. 18 User raises even fingers
(a) The number of four finger’s direction, (b) the number of two finger’s direction
VI. Experimental Results
In this study, we will demonstrate how our smart home system work and evaluate our smart home system.
There are three points we want to evaluate. The first point is a simple way to build a smart home system. This simple way integrate UPnP standard, OSGi framework, and web server. The second is an easy to use web console. We can manage a smart home environment anytime and anywhere, through this web console. The third point is a context awareness application. We develop a rule-based context awareness application and a dynamic service mechanism and it makes users obtain the service they need. Finally, those operations will be registered in the smart home system and showed in Fig. 19.
Fig. 19 Interface of event cache
Finally, we develop the hand gesture recognition system to confirm smart home system that can complete the OSGi-based web console for smart home with dynamic service registration. Example 1 is tested in the indoor environment. The background is considered as a simple in our system except that skin-color-like box is in the right side of image and the light source is a little bit asymmetrical. However, the whole recognition rate is up to 96.55%.
Example 1:
(a) (b)
(c) (d)
V. Conclusions
In this study, we propose a smart home environment which integrate the UPnP standard, the OSGi framework, web console, and the context awareness concept. We build the smart home environment by a simple way. The user can easily get a service from the smart home environment. Moreover, the user can ask the smart home system to complete the services they need. In addition, our system has the gesture recognition system under a complicated and dynamic environment which can achieve a robust recognition. In traditional approaches, in order to build the large data base, they always care about hand gesture appearing in a simple background. Once the background is more complicated, the recognition rate will become very bad. In contrast, our system does not need to build a large data base to process in a complicated environment. From our experiments, it is evident that our system can have a high recognition rate.
References
[1]林晏冬,"Architecture of Smart Home Systems with integration of Environment and Equipment 設備與環 境整合的智慧家庭系統", 碩士論文,國立台灣科技大學,台北,2009。
[2]黃炫諭,"Smart home at a finger tip: OSGi-based MyHome 植基於 OSGi 之數位家庭資訊全覽系統",
碩士論文,國立台灣科技大學,台北, 2009。
[3] D. O. Kang, K. Kang, S. G. Choi, and J. Lee, "UPnP AV architectural multimedia system with a home gateway powered by the OSGi platform," IEEE Transactions on Consumer Electronics, Vol. 51, No. 1, pp.
405- 406, 2005.
[4]莊鎮嘉,“在極大誤差情況之強健塑模”,國立台灣科技大學電機工程研究所博士論文,2000。
[5]廖崇儒,“可供輪椅使用者使用之基於電腦視覺的手勢辨識系統”,碩士論文,國立台灣科技大學電 機工程研究所,2010
[6]C. Hang and C. C, "Research and application of distributed OSGi for cloud computing," International
Conference on Computational Intelligence and Software Engineering, pp.1-5, 2010.
[7]李慶銘,“即時影音教學傳播系統的實現”,碩士論文,國立台灣科技大學電機工程系,2011。
[8] Barnett and Lewis, “Outliers in Statistical Data 3/e,” John Wiley & Sons, 1994.
[9]涂又仁,“利用人臉及手勢辨識之人機介面” ,國立中正大學電機工程研究所,碩士論文,2007。
[10] E.J. Holden and R. Owens, “Recognizing Moving Hand Shapes,” Proceedings of the 12th International
Conference on Image Analysis and Processing, pp. 14-19, 2003.
[11]黃俊捷,“互動雙足式機器人之設計與實現(I)手勢辨識”,國立中央大學電機工程所,碩士論文,2008。
國科會補助專題研究計畫成果報告自評表
請就研究內容與原計畫相符程度、達成預期目標情況、研究成果之學術或應用價 值(簡要敘述成果所代表之意義、價值、影響或進一步發展之可能性) 、是否適 合在學術期刊發表或申請專利、主要發現或其他有關價值等,作一綜合評估。
1. 請就研究內容與原計畫相符程度、達成預期目標情況作一綜合評估
■ 達成目標
□ 未達成目標(請說明,以 100 字為限)
□ 實驗失敗
□ 因故實驗中斷
□ 其他原因 說明:
2. 研究成果在學術期刊發表或申請專利等情形:
論文:□已發表 □未發表之文稿 ■ 撰寫中 □無 專利:□已獲得 □申請中 ■ 無
技轉:□已技轉 □洽談中 ■ 無 其他:(以 100 字為限)
3. 請依學術成就、技術創新、社會影響等方面,評估研究成果之學術或應用價 值(簡要敘述成果所代表之意義、價值、影響或進一步發展之可能性)(以 500 字為限)
在此一研究中,我們開發一個能夠跨平台、容易建置、且融合類似雲端運算的概念的智慧 家庭系統,讓行動不便者能夠隨時隨地使用行動裝置去遠端操控家庭中的設備及各項服務。
另外藉由記錄行動不便者的生活習慣,並動態產生新的服務。為了實現以上的論點,本研究 建構一個基於UPnP及OSGi上的系統,提供了可靠、具動態擴充性、且易於存取及管理的智慧 家庭環境。可以讓行動不便者不用做複雜的設定,即可以與機器互動。所建構之互動智慧型 系統,可以用於未來的系統整合及功能測試,使互動智慧型系統能確實在一般環境下被使用。
國科會補助計畫衍生研發成果推廣資料表
日期: 101 年 10 月 24 日
國科會補助計畫
計畫名稱:在一般環境下之與機器互動智慧系統研發 計畫主持人:蘇順豐
計畫編號:NSC 100-2221-E-011-050- 領域:智慧型機器人
無研發成果推廣資料
註:本項研發成果若尚未申請專利,請勿揭露可申請專利之主要內容。
國科會補助專題研究計畫出席國際學術會議心得報告
日期:100 年 10 月 24 日
一、參加會議經過
此次出席國際性研討會,能與來自全球各地的學者專家共同砥礪系統、人類及模控技術與其應用 領域的有關技術,研討現在及未來的技術發展趨勢,對筆者研究有直接的助益。以下簡述相關心得。
一 如 往 昔 , 大 會 在 研 討 會 開 始 前10/9日安排一兩個技術研習會(Workshops)以及7個教學研習會 (Tutorials),提供有興趣於鑽研諸專題的學者專家相當程度入門基礎及應用背景知識。研討會在10月9 日下午6:00 有歡迎宴會。
研討會在10月10日上午8:00開始大會節目正式登場。2011的大會主題為Cyber-Physical Systems),
著重於認知辨識,認知科學,腦波研究的先端技術與實際系統的結合應用。依循大會主題,本次大會 的議程共有與大會主題相關的3個Plenary Talks 以及1個Keynote Speech,1個論壇,105發表技術會議
(Technical Sessions)。10/10上午8:00開始大會演講,由Professor T. C. Henderson 主講「Innate Theories on Cognitive Agents: the Symmetry Engine」(認知代理人的天生理論:對稱引擎)。大會於9:00-10:00 安排 Professor Sukhan Lee 主講「Cognitive Recognition and the Home Mate Robot 」;在此演講中,Professor Lee 談及成功的商業機器人必須滿足VPC (Value>Price>Cost)準則,也必須具備Higher Dependability, Better Sociability, Greater Affordability 等三技術條件。另外,Professor Lee所發展的家庭伴侶機器人有 三大功能: Errand Service, Medical Delivery, and Video Chatting。
在10/11與10/12兩天,主辦單位於每天上午9:000至10:00間安排另兩個大會演講一,並每天於 10:30-12:10,13:40-15:30,16:00-18:00 等三兩時段內每時段最多有12場同時進行的小組技術會議。10/11 與10/12等兩場大會演講的題目與演講者分別是Prof. Jose Del R. Millan 主講第二場題目「Brain-Robot Interaction」(以腦波辨識與學習為主,進而控制輪椅與機器人),Prof. Robert O. Ambrose主講第三場大 會題目「Humans & Humanoids」(行動雙手臂機器人與太空的應用)。並於在10/11 10:30至12:00間, 安 排由Keith Hipel, Jim Tan, Mo Jamshidi等三位SMC會士,舉辦論壇,介紹SMC方法,吸引多人參加研討。
除了吸引近數百人聆聽的大會演講的精彩演講外,更引人入勝的是各種研究領域的小組技術研討 會議。每一小型技術會議裡有6 篇與主題相關的論文發表,每篇論文的發表者必須在20分內結束報告 並有完成問題回答時間。如果您對某些論點特別感興趣,除了當場請教外,也可私底下互相交流溝通。
計畫編號
NSC 100-2221-E-011-050-計畫名稱
在一般環境下之與機器互動智慧系統研發出國人員
姓名
蘇順豐服 務 機 構
及職稱 國立臺灣科技大學 電機工程系
會議時間
100 年 10 月 9 日至100 年 10 月 12 日 會議地點 美國阿拉斯加州
會議名稱
(中文)2011 IEEE, SMC 國際研討會(英文)2011 IEEE International Conference on Systems, Man, and Cybernetics
發表題目
(中文)滑動解耦控制系統的適應性傅立葉補償設計(英文)Adaptive Fourier Compensator Design for a Sliding Decoupling Control System
由於每一時段的12 組小型技術會議於同時段裡進行,聽者可穿梭於會場中,聽取自己所需的論文發 表。105 組小型技術會議的主題幾近乎包含廣闊,從服務系統,國土安全系統,虛擬與擴增實境與訓 練系統,腦機器界面(BMI),以人為中心的交通系統,知覺科學與工程,軟性計算,企業資訊系統與適 應合作,社會訊號處理,基礎結構系統,製造系統,計算智慧,高等機器學習,醫學機電整合學,醫 學與健康照護系統,智慧電力與能源系統,計算集體智慧,智慧系統, 圖項辨識,生物量測學與生物 資訊學,影像處理,分享控制,殘障人士的支持系統,系統建模與故障偵測,感測網路,人機系統,
人電腦互動,學習決策與控制,Welfare IT, 多媒體安全與私密性,Data Mining, Agent-based modeling, 演 化智慧系統與學習,Human Information Processing, 類神經網路,最佳化、演化計算與混合模型,智慧 型控制、智慧型交通系統、非線性控制、模糊控制、類神經網路控制、灰色系統、Petri 網路,決策支 持系統,Human-centered systems, Swarm 智慧,Granular 計算,複雜分析與認知心理,醫學資訊學,
行動機器人、行動機器人系統與控制,合作的無線感測系統,認知計算,反恐佈人士應用的資訊技術,
輔助技術,Kansei 工程與Affective computing, 知識系統,衝突解,多代理人與分散系統,Haptics 與 人-機器人互動,手勢互動,社會機器人學與機器人學習,、模式辨識與驗證、混合控制、嵌入式系統等 多方面的實務技術。在諸多的主題裡,筆者僅選擇相關有興趣的認知識別,認知計算,演化學習,學 習控制,智慧學習控制等相關的論文聆聽,參與相關的研討。雖是短暫的交流,對目前研究動態的掌 握,未來研究方向的釐定,甚有助益。
本次代表團王文俊教授發表之論文題目是"Vision Based 3-D Position Control for a Robot Arm"; 李 祖聖教授發表之論文題目是"Sensor Fusion Design for Navigation and Control of an Autonomous Vehicle";
林志民教授發表之論文題目是"Global Optimization Using Novel Randomly Adapting Particle Swarm Optimization Approach"; 陳錫明教授發表之論文題目是"A New Method for Fuzzy Forecasting Based on Two-Factors High-Order Fuzzy-Trend Logical Relationship groups and Particle Swarm Optimization Techniques"; 蔡清池教授發表之論文題目是 "Intelligent Adaptive Trajectory Tracking Control Using Fuzzy Basis Function Networks for an Autonomous Small-Scale Helicopter"; 鄭慕德教授發表之論文題目 是"An Efficient Deadlock Prevention Policy for FMSs"; 蘇順豐教授發表之論文題目是"Adaptive Fourier Compensator Design for a Sliding Decoupling Control System"。主辦單位為加強學者專家、與會者間的交 流,特別安排四個Social Events. 除10/9歡迎酒宴外,於10/10晚上有各期刊主編、副編、TC chairs, Chapter chairs等VIPs,於Hilton Hotel 的第15樓頂樓聚會,並提供晚餐。於12:00-14:00間在Hilton Hotel 的第15 樓頂樓,大會邀請SMCS VP, Prof. Loi Lei Lai 進行SMC會員促銷活動,說明如何成立支會,學生分會 等相關議程,其深入淺出的說明,讓與會者有不少教授願意成立支會與學生分會。最後大會在Hilton Hotel的宴會廳(ballroom),舉辦大會宴會,使與會者可共進晚餐,進而互增友誼。眾人把酒暢談,並相 約一年後韓國漢城相見。在大會宴會期間,有精彩的頒獎儀式,美國老鷹與拉雪橇狗的現場展示,以 及愛基斯摩人的音樂文化表演。
二、與會心得
系統、人與仿生技術之科技是一不斷地隨時代的需求推陳出新,符合人性需求的重要技術。它對 人類的影響無遠弗界。在此次的研討會中,相當多的研究主題是系統、人與仿生技術的各種理論,技 術與應用,比較新穎的課題將朝往認知識別,認知計算,演化學習,BMI與智慧機器人應用等研究課 題者,將逐漸增多。本次SMC2011國際研討會,相當成功。會場寬敞,各樣議程順暢。本次大會的三 場大會演講與Keynote演講,皆有獨到的技術發展,亦有相當有趣的範例與展示,相當值得聆聽。105 個技術會議(Technical Session)不只有嶄新的理論,亦有來自許多著名產業廠商與業界的實際應用範 例。本次研討會未安排展示攤位。與SMC2011年會國際研討會比較,目前國內所辦的系統科學與工程 技術的場次較少,規模亦小,但有安排書商與廠商的展示場,技術方面的研討已相當興盛,博碩士學
生參與研討會也相當熱烈。但國內業界參予研討會的人數不多,若能邀請對系統應用實務的業界研究 員,講述其系統實務設計實務經驗,以增加與會專家學者的另類觀點。
三、發表論文全文或摘要
In the paper, an adaptive Fourier compensator is proposed to compensate the sliding decoupling control
law for a class of uncertain coupling systems. Generally, on the hierarchical sliding mode, the sliding decoupling control law, which consists of an equivalent control law and a hitting control law, can be derived to stabilize the coupling system. When the system functions are subject to uncertainties, the control gain of the hitting control law can be adjusted to be a larger value to ensure the system stability. However, the control performance can not be guaranteed by the simple manner. So, in order to improve the control performance in this situation, an adaptive Fourier compensator is proposed to further compensate the sliding decoupling control law; the obtained control performance can be similar to that of the ideal sliding decoupling control law.
The simulation results clearly demonstrate the effectiveness of the proposed adaptive Fourier compensator.
四、建議
建議國內各個學術單位能積極爭取主辦大型國際研討會,增進與國際學者學術交流,此外政府相 關單位亦能充分支持國內的學術研究與交流機會,如此不但可以增進國際能見度,亦能給予國內學者 一個學習及討論的環境。
五、攜回資料名稱及內容
參加此次研討會帶回CD-ROM Proceeding of the SMC2011 國際研討會,內容包括所有的會議論文。
六、其他
SMC 2011 大會論壇活動
SMC 2011 大會宴會活動
SMC 2011 華人學者聚會
SMC 2011 大會第三場專題演講: Dr. Ambrose 主講第三場題目「Humans and Humanoids」
國科會補助專題研究計畫出席國際學術會議心得報告
日期:101 年 7 月 27 日
一、參加會議經過
2012 International Conference on System Science and Engineering (ICSSE 2012)為IEEE Systems, Man and Cybernetics (SMC)學會所協辦的國際學術學會會議。ICSSE 是2010 為Taiwan Association of System Science and Engineering (TASSE) 在台灣首次舉辦的國際學術學會會議,而ICSSE2011 在Macau 舉辦,這兩次台灣的學者都積極的參與此國際學術學會會議。為積極提昇我國國際學術地位,深入參 與重要國際學會相關學術活動,乃籌組本團隊出席今年101 年6 月30 日至7 月2 日在大陸大連舉行的 ICSSE2012。而此一會議的成功持續舉辦將對台灣的學術地位有相當的提昇作用,也能繼續維持台灣在 IEEE SMC 學會的影響力,並進而深入參與重要國際學會相關學術活動。
本屆會議論文則有120 篇左右論文錄取在會中報告,典禮簡單隆重。典禮結束,隨即有三位plenary speakers 發表演講。三個主題演講分別為:來自中國的Chinese Academy of Sciences 的Professor Fei-YueWang,講題為:“ACP-Based Parallel Control and Management for Complex Systems: Theory and Application”、來自加拿大的Alberta University 的Professor Witold Pedrycz,講題為:“User-Centric Granular Models of Temporal and Spatiotemporal Data”、以及來自中國上海的Shanghai Baosight Software Co. Ltd. 的Dr. LI-Quan Cong,講題為:“Che Green Manufacturing Techniques and Applications under the Consideration of Energy Supply Constriction”。由台灣創始的會議,台灣當然要支持,我們台灣學者參加 該會議大約有20幾位。此一研討會是全球各主要國家在系統科學與工程領域的年度盛會。此次,有來 自各地的學者、專家、工程師與研究生共聚一堂,互相切磋最先進的系統科學與工程領域之理論,技 術應用實務等內容,與會者皆受益良多。筆者蒙國科會的贊助有幸能參與此次盛會,除了報告自己的 研究成果外,並廣納諸多學者專家的經驗與新知。
本次的ICSSE 2012 中原大學李祖添講座教授為Honorary General Chair,中央大學王文俊院長為 General CoChair,台灣師範大學王偉彥教授為Program CoChair,本此申請團隊的團長台灣科技大學蘇 順豐教授為目前是SMC 學會Conference and MeetingCommittee 的委員,所以必須監督及了解此次會議 的進行。蘇教授在此次的國際會議中也是三個Special Sessions 的Organizer。同時蘇教授為Award Chair,所以主持a 了ward session。本次的組團的其他團員,中興大學蔡清池教授、陽明大學鍾翊方教
計畫編號
NSC 100-2221-E-011-050-計畫名稱
在一般環境下之與機器互動智慧系統研發出國人員
姓名
蘇順豐服 務 機 構
及職稱 國立臺灣科技大學 電機工程系
會議時間
101 年 6 月 30 日至101 年 7 月 2 日 會議地點 中國大連
會議名稱
(中文) 2012 年系統科學與工程國際研討會(英文) 2012 International Conference on System Science and Engineering
發表題目
(中文)針對線上調整強健模糊控制器之先前步驟小腦模型控制器(英文)The Previous Step CMAC for Online Tuning Robust Fuzzy Controllers
授及台灣大學連豊力教授三位將會是special sessions 的session chairs。而且三位的論文也被選為 conference paper award candidate papers。因此經由他們的參與能更有機會拿下paper award。中山大學黃 國勝教授也協助蘇順豐教授評審paper award。經由五位評審的討論蔡清池教授及鍾翊方教授的論文為 入選(finalists),而連豊力教授的論文則為大會最佳論文。蘇順豐教授為2013 ICSSE 的General co-chair.
所以也在大會晚宴上幫ICSSE 2013的主辦者Imre Rudas校長做ICSSE 2013 的相關簡報。
大會會場前 最佳論文之報告與提問
最佳論文頒贈說明 最佳論文finalist 頒贈
最佳論文頒贈 ICSSE 2013 的簡報
二、與會心得
本次會議由大連理工主辦,參加人員大部分來自大陸與台灣,國外的文章不多,國外人士也很少,
國際程度比前兩屆差一點。看起來大連理工並無用全力辦好此次研討會,熱鬧可以,精彩不足。Banquet 菜色很好,但沒表演,有點可惜。但是會議中可以感覺大陸教授與學生在研究方面進步明顯,而且相 當積極,台灣卻是陷在泥沼不知大陸已悄悄的追上來了。實在非常擔憂未來後台灣的競爭力,要如何 與大陸競爭?
三、發表論文全文或摘要
The previous step CMAC for online tuning robust fuzzy controllers is proposed in this paper. There are
two processes in the proposed schemes: one is the robust fuzzy controller and the other is the previous step CMAC learning algorithm. The robust fuzzy controller can achieve a certain goal without concern for instability of the controlled system in the presence of significant plant uncertainties, if the nominal parameter is roughly estimated. In order to improve the performance of robust fuzzy controller, the nominal parameter should be adjusted. Thus, a previous step CMAC learning algorithm under the robust fuzzy control structure is employed for online tuning the nominal parameter. Finally, simulation results demonstrate the excellent capability of the proposed schemes for improving the output performance.
四、建議
明年ICSSE 2013 在Hungary 的Budapest,由Óbuda University 的校長Imre Rudas來承辦。期望國 科會能持續補助以使我們的影響力也能持續。
五、攜回資料名稱及內容
1.大會論文集USB MP3 隨身碟一支。
2.未來一兩年各項研討會徵稿資料一套。
六、其他
國科會補助專題研究計畫出席國際學術會議心得報告
日期:100 年 10 月 24 日
一、參加會議經過
此次出席國際性研討會,能與來自全球各地的學者專家共同砥礪系統、人類及模控技術與其應用 領域的有關技術,研討現在及未來的技術發展趨勢,對筆者研究有直接的助益。以下簡述相關心得。
一 如 往 昔 , 大 會 在 研 討 會 開 始 前10/9日安排一兩個技術研習會(Workshops)以及7個教學研習會 (Tutorials),提供有興趣於鑽研諸專題的學者專家相當程度入門基礎及應用背景知識。研討會在10月9 日下午6:00 有歡迎宴會。
研討會在10月10日上午8:00開始大會節目正式登場。2011的大會主題為Cyber-Physical Systems),
著重於認知辨識,認知科學,腦波研究的先端技術與實際系統的結合應用。依循大會主題,本次大會 的議程共有與大會主題相關的3個Plenary Talks 以及1個Keynote Speech,1個論壇,105發表技術會議
(Technical Sessions)。10/10上午8:00開始大會演講,由Professor T. C. Henderson 主講「Innate Theories on Cognitive Agents: the Symmetry Engine」(認知代理人的天生理論:對稱引擎)。大會於9:00-10:00 安排 Professor Sukhan Lee 主講「Cognitive Recognition and the Home Mate Robot 」;在此演講中,Professor Lee 談及成功的商業機器人必須滿足VPC (Value>Price>Cost)準則,也必須具備Higher Dependability, Better Sociability, Greater Affordability 等三技術條件。另外,Professor Lee所發展的家庭伴侶機器人有 三大功能: Errand Service, Medical Delivery, and Video Chatting。
在10/11與10/12兩天,主辦單位於每天上午9:000至10:00間安排另兩個大會演講一,並每天於 10:30-12:10,13:40-15:30,16:00-18:00 等三兩時段內每時段最多有12場同時進行的小組技術會議。10/11 與10/12等兩場大會演講的題目與演講者分別是Prof. Jose Del R. Millan 主講第二場題目「Brain-Robot Interaction」(以腦波辨識與學習為主,進而控制輪椅與機器人),Prof. Robert O. Ambrose主講第三場大 會題目「Humans & Humanoids」(行動雙手臂機器人與太空的應用)。並於在10/11 10:30至12:00間, 安 排由Keith Hipel, Jim Tan, Mo Jamshidi等三位SMC會士,舉辦論壇,介紹SMC方法,吸引多人參加研討。
除了吸引近數百人聆聽的大會演講的精彩演講外,更引人入勝的是各種研究領域的小組技術研討 會議。每一小型技術會議裡有6 篇與主題相關的論文發表,每篇論文的發表者必須在20分內結束報告 並有完成問題回答時間。如果您對某些論點特別感興趣,除了當場請教外,也可私底下互相交流溝通。
計畫編號
NSC 100-2221-E-011-050-計畫名稱
在一般環境下之與機器互動智慧系統研發出國人員
姓名
蘇順豐服 務 機 構
及職稱 國立臺灣科技大學 電機工程系
會議時間
100 年 10 月 9 日至100 年 10 月 12 日 會議地點 美國阿拉斯加州
會議名稱
(中文)2011 IEEE, SMC 國際研討會(英文)2011 IEEE International Conference on Systems, Man, and Cybernetics
發表題目
(中文)滑動解耦控制系統的適應性傅立葉補償設計(英文)Adaptive Fourier Compensator Design for a Sliding Decoupling Control System
由於每一時段的12 組小型技術會議於同時段裡進行,聽者可穿梭於會場中,聽取自己所需的論文發 表。105 組小型技術會議的主題幾近乎包含廣闊,從服務系統,國土安全系統,虛擬與擴增實境與訓 練系統,腦機器界面(BMI),以人為中心的交通系統,知覺科學與工程,軟性計算,企業資訊系統與適 應合作,社會訊號處理,基礎結構系統,製造系統,計算智慧,高等機器學習,醫學機電整合學,醫 學與健康照護系統,智慧電力與能源系統,計算集體智慧,智慧系統, 圖項辨識,生物量測學與生物 資訊學,影像處理,分享控制,殘障人士的支持系統,系統建模與故障偵測,感測網路,人機系統,
人電腦互動,學習決策與控制,Welfare IT, 多媒體安全與私密性,Data Mining, Agent-based modeling, 演 化智慧系統與學習,Human Information Processing, 類神經網路,最佳化、演化計算與混合模型,智慧 型控制、智慧型交通系統、非線性控制、模糊控制、類神經網路控制、灰色系統、Petri 網路,決策支 持系統,Human-centered systems, Swarm 智慧,Granular 計算,複雜分析與認知心理,醫學資訊學,
行動機器人、行動機器人系統與控制,合作的無線感測系統,認知計算,反恐佈人士應用的資訊技術,
輔助技術,Kansei 工程與Affective computing, 知識系統,衝突解,多代理人與分散系統,Haptics 與 人-機器人互動,手勢互動,社會機器人學與機器人學習,、模式辨識與驗證、混合控制、嵌入式系統等 多方面的實務技術。在諸多的主題裡,筆者僅選擇相關有興趣的認知識別,認知計算,演化學習,學 習控制,智慧學習控制等相關的論文聆聽,參與相關的研討。雖是短暫的交流,對目前研究動態的掌 握,未來研究方向的釐定,甚有助益。
本次代表團王文俊教授發表之論文題目是"Vision Based 3-D Position Control for a Robot Arm"; 李 祖聖教授發表之論文題目是"Sensor Fusion Design for Navigation and Control of an Autonomous Vehicle";
林志民教授發表之論文題目是"Global Optimization Using Novel Randomly Adapting Particle Swarm Optimization Approach"; 陳錫明教授發表之論文題目是"A New Method for Fuzzy Forecasting Based on Two-Factors High-Order Fuzzy-Trend Logical Relationship groups and Particle Swarm Optimization Techniques"; 蔡清池教授發表之論文題目是 "Intelligent Adaptive Trajectory Tracking Control Using Fuzzy Basis Function Networks for an Autonomous Small-Scale Helicopter"; 鄭慕德教授發表之論文題目 是"An Efficient Deadlock Prevention Policy for FMSs"; 蘇順豐教授發表之論文題目是"Adaptive Fourier Compensator Design for a Sliding Decoupling Control System"。主辦單位為加強學者專家、與會者間的交 流,特別安排四個Social Events. 除10/9歡迎酒宴外,於10/10晚上有各期刊主編、副編、TC chairs, Chapter chairs等VIPs,於Hilton Hotel 的第15樓頂樓聚會,並提供晚餐。於12:00-14:00間在Hilton Hotel 的第15 樓頂樓,大會邀請SMCS VP, Prof. Loi Lei Lai 進行SMC會員促銷活動,說明如何成立支會,學生分會 等相關議程,其深入淺出的說明,讓與會者有不少教授願意成立支會與學生分會。最後大會在Hilton Hotel的宴會廳(ballroom),舉辦大會宴會,使與會者可共進晚餐,進而互增友誼。眾人把酒暢談,並相 約一年後韓國漢城相見。在大會宴會期間,有精彩的頒獎儀式,美國老鷹與拉雪橇狗的現場展示,以 及愛基斯摩人的音樂文化表演。
二、與會心得
系統、人與仿生技術之科技是一不斷地隨時代的需求推陳出新,符合人性需求的重要技術。它對 人類的影響無遠弗界。在此次的研討會中,相當多的研究主題是系統、人與仿生技術的各種理論,技 術與應用,比較新穎的課題將朝往認知識別,認知計算,演化學習,BMI與智慧機器人應用等研究課 題者,將逐漸增多。本次SMC2011國際研討會,相當成功。會場寬敞,各樣議程順暢。本次大會的三 場大會演講與Keynote演講,皆有獨到的技術發展,亦有相當有趣的範例與展示,相當值得聆聽。105 個技術會議(Technical Session)不只有嶄新的理論,亦有來自許多著名產業廠商與業界的實際應用範 例。本次研討會未安排展示攤位。與SMC2011年會國際研討會比較,目前國內所辦的系統科學與工程 技術的場次較少,規模亦小,但有安排書商與廠商的展示場,技術方面的研討已相當興盛,博碩士學
生參與研討會也相當熱烈。但國內業界參予研討會的人數不多,若能邀請對系統應用實務的業界研究 員,講述其系統實務設計實務經驗,以增加與會專家學者的另類觀點。
三、發表論文全文或摘要
In the paper, an adaptive Fourier compensator is proposed to compensate the sliding decoupling control
law for a class of uncertain coupling systems. Generally, on the hierarchical sliding mode, the sliding decoupling control law, which consists of an equivalent control law and a hitting control law, can be derived to stabilize the coupling system. When the system functions are subject to uncertainties, the control gain of the hitting control law can be adjusted to be a larger value to ensure the system stability. However, the control performance can not be guaranteed by the simple manner. So, in order to improve the control performance in this situation, an adaptive Fourier compensator is proposed to further compensate the sliding decoupling control law; the obtained control performance can be similar to that of the ideal sliding decoupling control law.
The simulation results clearly demonstrate the effectiveness of the proposed adaptive Fourier compensator.
四、建議
建議國內各個學術單位能積極爭取主辦大型國際研討會,增進與國際學者學術交流,此外政府相 關單位亦能充分支持國內的學術研究與交流機會,如此不但可以增進國際能見度,亦能給予國內學者 一個學習及討論的環境。
五、攜回資料名稱及內容
參加此次研討會帶回CD-ROM Proceeding of the SMC2011 國際研討會,內容包括所有的會議論文。
六、其他
SMC 2011 大會論壇活動
SMC 2011 大會宴會活動
SMC 2011 華人學者聚會
SMC 2011 大會第三場專題演講: Dr. Ambrose 主講第三場題目「Humans and Humanoids」

![Fig. 9 Dividing the edge of the image into 4 line segments [3]](https://thumb-ap.123doks.com/thumbv2/9libinfo/9127755.411911/14.892.284.638.168.386/fig-dividing-edge-image-line-segments.webp)