高頻雷達測流系統應用於海面船舶偵測與追蹤 (III)
55
0
0
全文
(2) 中 文 摘 要 : 臺灣四面環海,為東亞地區之海上交通要衝,亦是經濟貿易重要樞 紐,因此各種不同類型船舶頻繁地航行於臺灣周邊海域,船舶活動 的高度複雜性無形中增加海域監控的管理難度。近岸至專屬經濟海 域的管理(exclusive economic zone, EEZ)一直是世界海洋事務執 行單位的重要職責,因此妥善應用海洋科技儀器,強化區域內即時 的船舶動態監控能力成為重要議題。迄今臺灣已建立環臺岸基高頻 雷達測流系統網絡,主要以海洋表面流速量測為主要運作模式,該 系統具低成本、主動偵測、及接近即時等諸多優點,具有成為海域 監控工具的優勢與條件,其超視距特性(over the horizon, OTH)能 夠與原有近岸監控工具X-Band雷達達到互補之效,全面提升海域監 控的能力。本系列研究的主要核心目的是在現有環臺高頻雷達測流 系統網絡的基礎上,以不影響流場量測前提下,增設船舶偵測與追 蹤功能,除可增加原始系統的附加價值,並可協助國內提昇海域監 控能量。 本年度計劃乃延續與改善前兩期計畫之研究成果,並進行後續更深 入之技術探討與整合。主要目標有四點: 一、改良高頻雷達偵測技術以更有效地偵測與追蹤海面船舶。 二、都卜勒能譜上各ROI的環境雜訊與移動視窗大小之關聯性探討 ,藉由掌握環境雜訊快速對應出最合適的移動視窗大小,得以更快 速的進行船舶回波識別。 三、高頻雷達測流系統估測船舶回波強度研究,進而了解不同類型 船舶活動的回波特徵。 四、辨識與評估非合作船舶的威脅等級,主要綜整雙站所獲得目標 物資訊並利用前方交會法定位目標物確切經緯度,提供安全管制體 系可靠資訊協助其快速反應。 本報告綜整年度規劃的各項研發成果如下: 一、透過對演算法之程序調整與改良,避開與消除強回波影響,確 保最佳調適性曲面是依照子區域之環境雜訊進行門檻曲面的建立。 此外,透過程式自動化的建立,提升訊號篩選門檻之能力。 二、利用長期且大量之資料統計,分別討論各ROI內的環境雜訊與最 佳移動視窗大小間的關係,結果顯示其決定係數均為中高度相關 ,提供高頻雷達測站依照所量得之環境雜訊迅速對應出所需之移動 視窗大小,簡化資料處理程序之後續步驟,大幅提升系統識別船舶 訊號之能力。 三、以散裝貨輪為例,統計出其相對於雷達站視角約落於30゚至 150゚或 -30゚至 -150゚之間較能被漢本雷達站識別其訊號。此外,當 散裝貨輪右舷或左舷面向雷達站時,船舶的雷達截面積與雷達視角 的二次曲線回歸分析存在中高度相關性。 四、本研究利用實際例子進行船威脅等級評估,透過演算法獲得船 舶之空間經緯度、船速及航向資訊,以最小接觸距離之概念,提供 相關單位在雷達發現非合作目標物時經確認後還能夠有多少反應的 距離,作為指揮體系後續決策下達之參考依據。 中 文 關 鍵 詞 : 高頻雷達、船舶偵測與追蹤、雷達反射截面積、船舶自動識別系統 英 文 摘 要 : Enhancing near-real-time surveillance capability for complex vessel movements within an exclusive economic zone (EEZ) is an important issue for maritime management. High-.
(3) frequency (HF) radar’s over the horizon property can effectively extend detection range to cover most of an EEZ area, making it suitable for a long-range vessel monitoring system. An island-wide HF radar network has been established in Taiwan primarily to monitor ocean surface currents and other oceanic parameters. Compared to conventional radar, high-frequency (HF) radar transmits low-power radar waves and can extend its detection distance up to several hundred kilometers with less attenuation. The unique characteristics of HF radar’s sea-echoes due to a ship’s presence enable SeaSonde to cover a wide area for vessel detection. However, the type and dynamic behavior of the ship are diverse and varied. It is necessary to further study the influence of the radar echo intensity of the ship on the radar detection capability under different navigation conditions, and then we can identify the possible ship type of non-cooperative vessel from the continuous radar echo signal. The purpose of this study, one is to improve the algorithm to more effectively detect and track vessel. Another is to statistically analyze the radar cross section (RCS) data of vessels to understand the echo characteristics of the ship under different operating conditions. The other is to identify and evaluate the threat levels of non-cooperative ships so that monitoring unit can carry out subsequent appropriate responses. This paper applied the ship echo detection technology developed by Chuang et al. (2015) to identify the ship's signal in the radar system and compare with the automatic identification system (AIS) to confirm the ship's echo signal. And then the radar equation was used to calculate the target ship’s RCS. The results show that the aspect angles of vessel relative to the radar station are between 30?to 150?and -30?to -150?, and the echoes of ships at different distances have strong echo performance if their aspect angles are close to vertical. In addition, the quadratic regression analysis of the ships’ RCSs and aspect angles shows that there is a moderate-highly correlation. 英 文 關 鍵 詞 : high-frequency (HF) radar, vessel detection technique, radar cross section (RCS), automatic identification system (AIS).
(4) 摘. 要. 臺灣四面環海,為東亞地區之海上交通要衝,亦是經濟貿易重要樞紐,因此各種不同 類型船舶頻繁地航行於臺灣周邊海域,船舶活動的高度複雜性無形中增加海域監控的管理 難度。近岸至專屬經濟海域的管理(exclusive economic zone, EEZ)一直是世界海洋事務執行 單位的重要職責,因此妥善應用海洋科技儀器,強化區域內即時的船舶動態監控能力成為 重要議題。迄今臺灣已建立環臺岸基高頻雷達測流系統網絡,主要以海洋表面流速量測為 主要運作模式,該系統具低成本、主動偵測、及接近即時等諸多優點,具有成為海域監控 工具的優勢與條件,其超視距特性(over the horizon, OTH)能夠與原有近岸監控工具 X-Band 雷達達到互補之效,全面提升海域監控的能力。本系列研究的主要核心目的是在現有環臺 高頻雷達測流系統網絡的基礎上,以不影響流場量測前提下,增設船舶偵測與追蹤功能, 除可增加原始系統的附加價值,並可協助國內提昇海域監控能量。 第一年主要研究方向著重於「船舶回波訊號識別技術的建立與驗證」,已研發出一套 能夠隨著環境雜訊而調適門檻值之高頻雷達船舶偵測技術。第二年為「船舶方位辨識技術」 , 以多重訊號分類演算法解算出船舶之方位角資訊,且以雙雷達測站共同交會出目標物大致 位置。本年度計劃乃延續與改善前兩期計畫之研究成果,並進行後續更深入之技術探討與 整合。主要目標有四點: 一、改良高頻雷達偵測技術以更有效地偵測與追蹤海面船舶。 二、都卜勒能譜上各 ROI 的環境雜訊與移動視窗大小之關聯性探討,藉由掌握環境雜訊快 速對應出最合適的移動視窗大小,得以更快速的進行船舶回波識別。 三、高頻雷達測流系統估測船舶回波強度研究,進而了解不同類型船舶活動的回波特徵。 四、辨識與評估非合作船舶的威脅等級,主要綜整雙站所獲得目標物資訊並利用前方交會 法定位目標物確切經緯度,提供安全管制體系可靠資訊協助其快速反應。 本報告綜整年度規劃的各項研發成果如下: 一、透過對演算法之程序調整與改良,避開與消除強回波影響,確保最佳調適性曲面是依 照子區域之環境雜訊進行門檻曲面的建立。此外,透過程式自動化的建立,提升訊號 篩選門檻之能力。 二、利用長期且大量之資料統計,分別討論各 ROI 內的環境雜訊與最佳移動視窗大小間的 關係,結果顯示其決定係數均為中高度相關,提供高頻雷達測站依照所量得之環境雜 訊迅速對應出所需之移動視窗大小,簡化資料處理程序之後續步驟,大幅提升系統識 別船舶訊號之能力。 I.
(5) 三、以散裝貨輪為例,統計出其相對於雷達站視角約落於 30 ゚至 150 ゚或 -30 ゚至 -150 ゚之 間較能被漢本雷達站識別其訊號。此外,當散裝貨輪右舷或左舷面向雷達站時,船舶 的雷達截面積與雷達視角的二次曲線回歸分析存在中高度相關性。 四、本研究利用實際例子進行船威脅等級評估,透過演算法獲得船舶之空間經緯度、船速 及航向資訊,以最小接觸距離之概念,提供相關單位在雷達發現非合作目標物時經確 認後還能夠有多少反應的距離,作為指揮體系後續決策下達之參考依據。 【關鍵字】:高頻雷達、船舶偵測與追蹤、雷達反射截面積、船舶自動識別系統。. II.
(6) Abstract Enhancing near-real-time surveillance capability for complex vessel movements within an exclusive economic zone (EEZ) is an important issue for maritime management. High-frequency (HF) radar’s over the horizon property can effectively extend detection range to cover most of an EEZ area, making it suitable for a long-range vessel monitoring system. An island-wide HF radar network has been established in Taiwan primarily to monitor ocean surface currents and other oceanic parameters. Compared to conventional radar, high-frequency (HF) radar transmits low-power radar waves and can extend its detection distance up to several hundred kilometers with less attenuation. The unique characteristics of HF radar’s sea-echoes due to a ship’s presence enable SeaSonde to cover a wide area for vessel detection. However, the type and dynamic behavior of the ship are diverse and varied. It is necessary to further study the influence of the radar echo intensity of the ship on the radar detection capability under different navigation conditions, and then we can identify the possible ship type of non-cooperative vessel from the continuous radar echo signal. The purpose of this study, one is to improve the algorithm to more effectively detect and track vessel. Another is to statistically analyze the radar cross section (RCS) data of vessels to understand the echo characteristics of the ship under different operating conditions. The other is to identify and evaluate the threat levels of non-cooperative ships so that monitoring unit can carry out subsequent appropriate responses. This paper applied the ship echo detection technology developed by Chuang et al. (2015) to identify the ship's signal in the radar system and compare with the automatic identification system (AIS) to confirm the ship's echo signal. And then the radar equation was used to calculate the target ship’s RCS. The results show that the aspect angles of vessel relative to the radar station are between 30 ゚ to 150 ゚ and -30 ゚ to -150 ゚, and the echoes of ships at different distances have strong echo performance if their aspect angles are close to vertical. In addition, the quadratic regression analysis of the ships’ RCSs and aspect angles shows that there is a moderate-highly correlation. Keywords: high-frequency (HF) radar, vessel detection technique, radar cross section (RCS), automatic identification system (AIS). III.
(7) 一、前言 臺灣四面環海,不明的軍事目標、恐怖主義、海盜、非法海運移民等眾多海上威脅 日益增加,影響了海事安全、國防安全、海洋環境及專屬經濟海域等管理難度。應用船舶 監控科技以即時掌握大範圍海域的船舶動態,是近年來海洋事務與科技的主要研究課題。 圖 1 是從船舶自動辨識系統(automatic identification system, AIS)摘錄的六小時船舶點位資 料,清楚顯示臺灣周遭海域船舶活動的複雜程度;此外 AIS 未能顯露的還有兩岸間時有 所聞的越界捕魚、偷渡走私等非法行為,這更增加海域監控與管理的難度。 而現今主要以技術為導向的監測工具,包括 VHF 的 AIS 系統、空載、陸基、艦載 雷達系統、或是紅外線等不同偵測方式,在傳輸距離、天候、成本、及技術門檻上,有著 不同優缺點與限制(Lin and Huang, 2006;Chung et al. 2013)。以 AIS 系統來說,雖可透過 資料交換獲得船舶位置、速度和航程等完整資訊,但需要船舶自發性的資料反饋為其主 要缺點,且資料傳輸往往受限於距離限制。而高頻雷達因屬主動式觀測,且其頻率範圍 具有超視距(over the horizon, OTH)特性,可有效地克服地球曲率的限制(Khan et al. 1994), 進而監測廣闊的海域,非常適合作為預警系統的一環。 自 2008 年起國家實驗研究院臺灣海洋科技研究中心執行「臺灣四周海域表層海流 即時觀測平台」計畫,採用美國 CODAR 公司之 SeaSonde 系統建置近即時環臺高頻雷達 表層海流觀測系統,架設廠址遍佈全臺(見圖 1 之黑色實心圓點位置);臺灣東北角海域的 測流任務則由中華民國海軍官校(R.O.C. Naval Academy)建置二站長距離高頻雷達系統 (見圖 1 之黑色實心三角形位置)來進行。因此,高頻雷達系統偵測範圍涵蓋臺灣周遭海 域,具有進行全天候及大範圍船舶監控之潛力。. 資料來源:港灣研究中心 AIS 船舶動態資料. 圖1. 2013 年 10 月 29 日 02-08 時臺灣周邊海域船舶動態圖. 1.
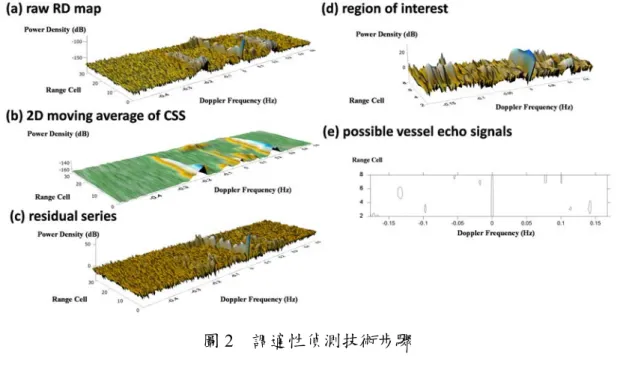
(8) 二、研究目的 岸基高頻雷達測流系統運用電磁波遙感探測技術(electromagnetic remote sensing)提 供了完整的流場測繪能力,同時也成為較具成本效益的海洋表面流量測方式(Statscewich & Musgrave, 2006)。迄今臺灣已建立環臺岸基高頻雷達測流系統網絡,主要以海洋表面流 速量測為主要運作模式,在不影響流場量測前提下增加其船舶偵測與追蹤之附加應用價 值,始終是三期研究計畫之核心宗旨。本研究團隊使用位於東北角兩座高頻雷達測站(見 圖 1 之黑色實心三角形位置)之資料完成第一年度計畫:「原始資料分析與解碼」、「環 境雜訊探討分析」、「船舶偵測技術開發」與「雙站資料比對驗證」等工作項目;第二年 度完成「船舶訊號識別方法之比較」、「目標方位判定技術與探討」、「雙雷達站估算船 舶位置與船速向量」與「船速向量與應用船舶自動辨識系統進行驗證」,本年度乃延續與 改善前兩期計畫之成果,並進行後續更深入之技術探討與整合。本期研究的主要目的有 三:一、改良高頻雷達偵測技術以更有效地偵測海面船舶訊號;二、估測高頻雷達偵測之 船舶回波強度,進而了解不同類型船舶活動之訊號特徵;三、運用前項改良的識別技術 評估非合作船舶之威脅等級,以利於安全管制體系迅速反應。. 三、研究方法 3.1 船舶偵測技術改良 3.1.1 前期船舶偵測技術成果提要 SeaSonde 高頻雷達測流系統之交錯譜序列(cross spectra series,或稱都卜勒能譜 (Doppler spectra))除了可用來解析海流資訊,同時隱含有船舶回波訊號於其中,但能譜上 其他多變的環境雜訊會不利於船舶訊號之判別,因此需要透過後端訊號處理方式將屬於 船舶回波之局部峰值(local peak)從都卜勒能譜上篩選出來。一般訊號二值化區分法因設 定固定門檻值,對於易受到環境背景影響的能譜變動值無法進行調適性的篩選,因此實 有必要建立具有彈性且能順應雜訊強弱變化之目標物偵測技術,使其能夠隨著環境背景 雜訊與回波距離而產生自適應閾值,以萃取出可能的船舶回波訊號。以下介紹第一年度 所發展之 ADT 包含四個主要步驟:第一步驟是對距離都卜勒譜(圖 2a)進行二維移動平均 (two-dimensional moving average)之平滑化處理,可以得到如圖 2b 的移動平均曲面,研究 選定移動視窗規格如下: 3 3 、 3 9 、 315 、 3 21、 3 27 、 3 33 、 3 39 、 3 45 、. 3 57 、 3 69 、 3 81、及 3 105,其中第一及第二個數值分別代表距離單元、以及都卜 勒單元的個數;第二步驟接著將距離都卜勒譜與其平滑化後的平均曲面相減,可得到殘 差序列(residual series,圖 2c);第三步驟從殘差序列中選定感興趣的區域(region of interest, ROI,圖 2d)來進行後續的船舶訊號篩選;接著進入最後一個步驟,是根據圖 2c 中的殘差 值之標準差(standard deviation)來選擇調適性門檻曲面,以萃取出疑似船舶回波訊號的局 2.
(9) 部峰值(圖 2e)。圖 2 各小圖的水平橫軸為都卜勒頻率(Doppler frequency)、水平縱軸為距 離單元(range cell)、垂直軸為回波能量密度。利用 ADT 流程將高頻雷達之距離都卜勒譜 中疑似船舶的回波訊號篩選出後,最後再利用船舶自動辨識系統(automatic identification system, AIS)所記錄的資訊,來進一步確認高頻雷達所篩選出的目標船舶訊號。. 圖2. 調適性偵測技術步驟. 3.1.2 調整並優化船舶偵測技術 本研究第一期研究案「高頻雷達測流系統應用於海面船舶偵測與追蹤(I)」已發展一 套調適性偵測技術(adaptive detection technique, ADT),並利用船舶自動辨識系統(automatic identification system, AIS)所提供的資訊確認 ADT 的可行性,也將此一科技部計畫之成果 發表於第 37 屆海洋工程研討會(莊等,2015)。更在後續利用高頻雷達系統探討環境雜訊 水平之研究中進一步發現:ADT 處理程序所選擇的移動視窗(moving window)尺寸大小與 環境雜訊間存在著高度的相關性,意即所選定之調適性門檻曲面會隨雜訊水平趨勢呈現 起伏變化,又因考慮環境雜訊會與接收天線附近之地形、雷達偵測距離、及電離層干擾 等諸多因素有關,各距離單元對不同頻率的電磁波反應的雜訊會隨時間與季節而有所不 同,感興趣區域的選定也須考量雜訊在時空的分布特性,因此實有需要將感興趣區域分 為遠域、中域、近域等區塊進行討論,而非直接針對整張涵蓋不同環境雜訊特性之距離 都卜勒譜進行處理,此部分在發現兩者間高度相關性之後是存在演算法改進的空間。此 外,針對任務需求探討特定都卜勒譜上之區域,建構其最佳之移動視窗以獲得調適性門 檻曲面,似乎能更有效將船舶回波訊號萃取出,同時也可省去非感興趣區域的頻譜處理, 提升整體分析效率。欲改良 ADT 之另一原因在於其利用「2D MA filtering」對整張距離 都卜勒譜進行濾波動作時,零頻區與一階布拉格鋒值的強烈回波能量會擴展到附近頻移 單元的移動平均值,進而遮蔽原本落在附近的船舶訊號,對此也是需要進行演算法改良 優化之重點。基於上述所提出之兩大改進方向,本期研究將對 ADT 程序進行改良,在分 3.
(10) 析程序上做了部分調整與優化處理,並重新命名為調適性訊號識別(adaptive signal identification, ASI)演算法(見圖 3);另外針對關鍵細節進行更深入之技術探討與整合,使 其更符合實際監控作業之需求,同時對於後續第 3.2 節「都卜勒能譜上各 ROI 的環境雜 訊與移動視窗大小之關聯性探討」之研究也相當有助益。 Receiver Chassis SeaSonde Acquisition. Time Series (.ts) 1st FFT. Range Series (.rs) 2nd FFT. Cross Spectra Series (CSQ_.cs) MUSIC. ASI. Region of Interest (ROI) 2D MA filtering. Moving Average of CSQ in ROI Residual Series SD threshold setting. voltages cross spectra averaging. Doppler bin selecting. DC removal & subregion selection. Covariance Matrix eigenvalue decompositing. Eigenvalue & Eigenvector subspace type defining. Signal Subspace & Noise Subspace. Possible Vessel Echoes. DOA calculating. DOA estimation. cross checking with AIS. Vessel Identification. 圖3. 高頻雷達測流系統應用於船舶偵測與追蹤流程圖. 主要改良程序有二:第一項為當涵蓋各種訊號之都卜勒譜進入到船舶訊號識別處理 程序時,首要步驟是執行「subregion selection」,再針對此區域進行「2D MA filtering」 利用二維移動平均濾波器(two-dimensional moving average filter)進行濾波,意即此作法是 專為所選定之 ROI 依照區域性的環境雜訊去建立最佳調適性門檻曲面,以擷取所需之目 標物訊號,而非整張包含不同環境雜訊特性之距離都卜勒譜,另一好處為一階布拉格鋒 值的強烈回波即利用子區域的選定框出 ROI 以避開其影響;第二項為「DC removal」步 驟,即將零頻附近的強烈回波濾除,且進行資料補遺動作以維持資料的連續性,此作法 之用意在於避免零頻區之強烈回波影響而擴大扭曲範圍,確保最佳調適性曲面是依照子 區域之環境雜訊進行建立。期望透過上述改良方式可大幅強化其能夠隨著環境背景雜訊 與回波距離而調整適當的訊號篩選門檻之能力,進而於後續研究中更有效地萃取出可能 的船舶回波訊號並進行相關分析,包括後續子計畫「都卜勒能譜上各 ROI 的環境雜訊與 移動視窗大小之關聯性探討」、「岸基高頻雷達測流系統估測船舶回波強度」、及「威脅 等級評估」均會實際運用此一新的 ASI 偵測技術進行資料分析。以高頻雷達測流系統進 行船舶偵測與追蹤的演算方法與分析流程請參見圖 3。. 4.
(11) 3.2 都卜勒能譜上各 ROI 的環境雜訊與移動視窗大小之關聯性探討 雷達在偵測感興趣之目標物的同時,回波訊號往往會伴隨著環境雜訊或其他複雜的 訊號(Luhr & Adams, 2015),原因在於高頻雷達所使用之高頻頻段之電磁波,容易受到電 離層反射回波以及其他雷達訊號干擾,尤其當雷達用於流場量測時,海面雜波(sea clutter) 及電離層反射回來的雷達波均會增加量測之不確定性,甚至是限制雷達系統之偵測效能 (Barrick, 1980)。第一期研究案中有一子計畫為「環境雜訊分析」,雜訊水平(noise floor) 是原廠系統評估環境特性的指標,可用於頻譜上之訊雜比(signal to noise ratio, SNR)計算。 以長距型測站為例,其雜訊水平量測方式為選定頻率範圍從第二階布拉格峰值向外至±最 大頻率域兩端之區域,將此區域內的頻譜能量值進行平均。在該研究案中大量分析蘇澳 與漢本此二長距型高頻雷達測站之時空變異資料,且更進一步發現環境雜訊與 ADT 處理 程序所選擇的移動視窗尺寸大小有高度相關。例如圖 4 為漢本站於 2013 年 10 月 29 日 10 時至 13 時都卜勒頻率單元(Doppler bin)之最佳移動跨度與雜訊水平之比較,其中橫軸代 表時間;右側縱軸為雜訊水平值(單位 dBm);左側縱軸為移動視窗的最佳移動跨度。該圖 顯示最佳移動跨度曲線隨雜訊水平趨勢呈現一致性的上下起伏變化,尤其於 12:00 時兩 者皆達到最高峰,從圖中可以得知當該區域環境雜訊較高時,調適性偵測技術的最佳移 動跨度也會因應而隨之上升。然而,掌握海域環境雜訊特性對於科研與軍事任務上始終 具有實質之重要性,若能夠利用 ROI 內的環境雜訊與最佳移動視窗大小間的關係,透過 較容易掌握之環境指標特性迅速對應出最合適的移動視窗大小,將可簡化 ASI 資料處理 程序之後續步驟,大幅提升系統識別船舶訊號之能力。 頻譜上不同距離單元所受到環境雜訊影響不盡相同,需根據任務需求進行 ROI 縱軸 距離單元及橫軸都卜勒頻率(單位 Hz)範圍之分區選擇,距離單元可先依照權責單位負責 的監控區域先進行劃分,例如 12 海浬為領海、領海外側 24 海浬是毗連區(亦稱「臨接海 域」或「臨接區」),均提供在分區選定上之參考依據;橫軸上由於典型的都卜勒頻譜會 有兩個一階布拉格鋒在 ±0.213 Hz 處,且由於波浪連續性的移動會將一階布拉格峰分散 在好幾個都卜勒頻率單元上,因此為了避開兩側一階布拉格峰值的強烈回波,橫軸範圍 可選擇中心都卜勒零軸(Doppler Zero)位置至左右兩側 ±0.17 Hz 處。以台灣東北角漢本高 頻雷達測站偵測船舶為例,根據長時間的頻譜資料顯示,於 RC25 之後距離常會出現較 明顯的電離層干擾,導致該範圍具有強烈的回波值(見圖 5),因此可將 RC25 以內範圍區 分為近程至遠程 ROI,此外東北角區域船舶大部分航行於海域的船舶多位於雷達距離單 元 8 之內,加上近岸區域能被 X-band 岸基雷達所涵蓋,因此從雷達距離單元從 2-8 為近 域開始劃分 ROI 範圍,將正負一階布拉格峰間區分成三大紅色區域,近域 ROI(I),其範 圍為 RC2 至 RC8;中域 ROI(II),其範圍為 RC9 至 RC15;遠域 ROI(III),其範圍為 RC16 至 RC21,以此三大區域進行後續環境雜訊與移動視窗大小的關聯性進行探討,進而有利 於各區依照該區域環境雜訊特性作船舶訊號識別。. 5.
(12) -146 Optimal Span Noise Floor (dBm). -148 60 -150. Noise Floor (dBm). Optimal Span across Doppler Bins. 80. -152. 40. 10:01 10:18 10:35 10:52 11:09 11:26 11:43 12:00 12:17 12:34 12:52. Time. 圖4. 漢本站於 2013 年 10 月 29 日 10 時至 13 時都卜勒頻率單元最佳移動跨度 與雜訊水平比較圖. 圖5. 都卜勒能譜上各 ROI 分區圖. 3.2.1 雜訊準位之建立 根據本研究案第一項子計畫所發展 ASI 演算法之訊號處理流程,其優先選定感興趣 區域進行後續船舶回波訊號識別,訊號處理之方法皆針對 ROI 內進行解算,並無擴展至 其它非感興趣之區域,因此本文認為在此子計畫中欲探討環境雜訊對於 ASI 自動選用之 移動視窗間的相關性,同樣也須針對所 ROI 內取得具有代表性之環境雜訊做為比對指標 應較為適當,且近域、中域、及遠域之區域各涵蓋諸多距離單元,若是根據原廠系統一個 距離單元下僅獲取ㄧ雜訊準位數值代表該距離的環境雜訊之方式,可能較無法代表 ROI 內整體之雜訊準位。以近域之 ROI 為例,其區域從 RC2 至 RC8 共橫跨 7 個距離單元, 因此本文欲自行建立區域內之雜訊準位,期望能夠掌握 ROI 內所獲得的自行建立雜訊準 位與最佳移動視窗大小間的關係,迅速對應出最合適的移動視窗大小,將演算法化繁為 簡以大幅提升雷達系統識別船舶訊號之能力。 根據先前利用蘇澳及漢本站大量資料顯示,當原始交錯譜序列減掉最佳移動視窗建 6.
(13) 立之調適性門檻,通常在 2 倍標準差下可以將船舶訊號與雜訊分離。在此以漢本高頻雷 達測站於 2013 年 10 月 29 日 11:26 時之原始交錯譜序列為分析例,圖 6(a)為選定範圍的 都卜勒能譜 ROI 經過 ASI 處理後得到的殘差序列,橫軸代表都卜勒頻移(Doppler shift), 單位 Hz;縱軸為距離單元(range cell)。圖 6(b)至圖 6(f)顯示以各標準差(分別是 1.3σ、1.5σ、 2σ、2.5σ、及 3σ)作為調適性門檻值的設定,所過濾出的疑似船舶回波。此外亦將 AIS 船 舶航跡資料進行轉換(見第 4 節「應用船舶自動辨識系統進行驗證」)後標示在圖 6 上,以 利後續比對。圖中綠色實線圓圈(solid cycle)代表高頻雷達之都卜勒能譜經 ASI 過濾出的 資料與 AIS 驗證相符之船舶訊號;而紅色虛線圓圈(dotted cycle)則代表有 AIS 航跡資料, 但無法被雷達發現者;紅色虛線方框(dotted rectangle)則為無 AIS 航跡資料,但可被雷達 發現的疑似船舶訊號。 圖 6(b)及圖 6(c)是以 1.3σ 及 1.5σ 做為門檻值所篩選出來的結果,利用 AIS 進行比 對後,可以發現 1.3σ 的門檻篩選下存有許多偽訊號(spurious signals),點狀的雜訊回波依 舊遍佈於 ROI 內,應是濾波平面的調適性門檻太低,不足以過濾掉雜訊。因此進一步以 1.5 倍標準差之較高門檻作為濾波平面,可過濾出較少偽訊號的結果,如圖 6(c)所示。然 後再分別以 2 倍、2.5 倍、及 3 倍標準差來找尋最佳的調適性門檻平面。圖 6(e)的實線圓 圈比圖 6(d)少了 B 訊號的雷達回波,圖 6(f)更進一步將 C 訊號也一併濾除了,這代表若 是門檻太高會濾掉太多正常訊號,此一結果證實二維移動平均曲面加上 2 倍標準差能有 效過濾出訊號 A、B、C、D 四艘經 AIS 確認的船舶回波。 綜上所述,在雙高頻雷達測站大量資料分析中,通常使用二維移動平均曲面加上 2 倍標準差做為較佳的濾波曲面之門檻值,能有效進行船舶訊號與雜訊之分離。因此,本 文以原始頻譜中低於二維移動平均曲面加上 2 倍標準差以下的數值定義為雜訊,並取得 雜訊之平均做為 ROI 內自行定義之環境雜訊指標,以利於後續與最佳移動視窗進行關聯 性探討。. 7.
(14) 圖6. 以不同倍數標準差做為濾波門檻之船舶訊號篩選結果. 8.
(15) 3.2.2 最佳移動視窗之選定方法 ASI 所採用的殘差序列是將原始距離都卜勒能譜減去其移動平均曲面後所得到的一 序列殘差值,以統計學來說殘差值能夠用來檢驗統計模型之適當性(Cui et al., 2012)。殘差 分析假設誤差項(errors)是獨立且常態分佈,並且在各因子水準(factor level)上具有相同的 變異數(Quesenberry, 1988)。根據上述合理的理論假設,殘差序列的直方圖應符合常態分 佈,因此比較各種移動平均視窗產出的殘差序列的直方圖之峰度及偏度,即可判斷出最 符合或接近常態分佈所對應的移動視窗大小。 為執行本計畫項「都卜勒能譜上各 ROI 的環境雜訊與移動視窗大小之關聯性探討」 , 需利用程式執行統計分析方法分析大量雷達站資料,自動判別殘差序列之峰度及偏度找 出各筆資料之最佳移動視窗,並配合自定義之雜訊準位,掌握移動視窗與環境雜訊之時 空變異相關性。因此,對於判定最佳移動視窗之選定方法將於此節詳細介紹:ASI 對 ROI 進行二維移動平均之平滑化處理,研究選定移動視窗規格如下:3 3、3 5、3 7 、3 9 依序至 3105,共計 57 個移動視窗測試,其中第一及第二個數值分別代表距離單元、以 及都卜勒單元的個數;第二步驟將原始距離都卜勒譜與各平滑化後的平均曲面相減,可 得到殘差序列,接著利用判斷式進行殘差序列常態分布之判斷,優先選定偏度為 0 之移 動視窗,若偏度不為 0 則搜尋偏度最接近 0 且後續資料連續十筆變化率小於 1%,表示其 偏度以趨於收斂而變化不大,若無法收尋到上述篩選條件之資料,則不計算該筆資料。 在上述較嚴格之限制條件下,期望透過此最佳移動視窗選定方式,將長時間資料以散佈 圖呈現兩者之關聯,並以決定係數協助判斷兩者之相關性。. 3.3 岸基高頻雷達測流系統估測船舶回波強度 雷達回波訊號中待辨識的目標物需具有足夠的雷達截面積(radar cross section, RCS) 才能將雷達發射之電磁波散射回接收天線單元,提供雷達直接量測及識別。RCS 與目標 物的尺寸、方向性、距雷達站的距離等因素有關(White, 1998),意即要應用雷達系統偵測 海面上船舶,必須準確且具體掌握散射體或者是感興趣船舶的 RCS (Podilchak et al., 2009)。本團隊於前兩期計畫之成果中已可從高頻雷達的都卜勒能譜中擷取與辨識出船舶 資訊,但船舶的型式與動態是多樣且多變的,實有必要深入探討船舶在不同航行條件下 的雷達回波強度對於雷達偵測效能之影響。因此,現擬更深入探討不同船舶的所在距離 及航向變化所造成的 RCS 差異,以了解船舶活動時的回波特徵之變異程度,進而可由非 合作船舶的連續雷達回波訊號來判別可能的船舶類型。. 3.3.1 雷達截面積文獻探討 在雷達輻射場中,目標物被電磁波照射後會將能量散射於空間當中,其中部份能量 因後向散射(backscattering)會依原路徑返回,RCS 衡量的是當能量回到雷達接收天線處可 9.
(16) 被截獲接收的輻射功率(Merrill, 1990),其單位通常是以分貝/平方公尺(deciBel squared meter, dBsm)來表示。此外,雷達接收目標物能量的大小同時也意味著雷達偵測及追蹤目 標物的能力(Fordham & Baggett, 2005)。往昔研究船舶與 RCS 之關係的文獻有:Podilchak et al. (2009)透過高頻雷達偵測船舶 RCS 的結果與 FEKO 模式的結果相比較,證明雷達偵 測目標物的準確性;Walsh et al. (2010)利用高頻雷達分析在不同操作頻率(operating frequencies)及海況下平台及平底貨船(barge)的 RCS 變化;Dzvonkovskaya and Rohling (2010)利用 WERA 線性陣列天線雷達針對 32 艘大型貨輪進行 RCS 的研究,來檢視貨輪 於不同的距離以及船舶相對於雷達站視角(aspect angle)所造成不同的 RCS,藉此能夠了 解雷達對於船舶的偵測效能。. 3.3.2 目標物雷達截面積估測 目標物的 RCS 為天線接收到的散射功率密度(power density)與入射目標物的功率密 度兩者之間的比較,因此 RCS 能夠透過著名的雷達距離方程式(Dzvonkovskaya & Rohling, 2010) 取得。本章節即是根據 SeaSonde 高頻雷達系統用於解算流場資料的雷達方程式, 將其應用於船舶 RCS 之估算,公式定義如下: S/N . Pt Gt Lc Dr F 4 0 A2 i (4 ) 3 R 4 kTFa. (1). 其中:S/N 為訊雜比、 Pt 為雷達平均發射功率、 Gt 為發射天線能量增益、 Lc 為發射天線 之纜線損耗、 Dr 為接收天線指向增益、F 為單向衰減因子,此參數考慮海況的粗糙度影 響、R 為目標物與雷達之距離、 0 為雷達截面積,單位為平方公尺(square meters, m2)、 A 為該距離單元(range cell, RC)之面積,等於目標物所在之距離乘上距離單元解析度 R 與方位角幅(azimuth angular width) 、 為雷達波長、 i 為相干積分時間、kT 為,內部 的熱雜訊(thermal noise) 能譜密度( 4 10 21 W/Hz) ,T 為 270 ( ° K) ;k 為波茲曼常數 ( 1.38 10 23 )、 Fa 為外部雜訊指數(external noise factor)。表 1 是 SeaSonde 原廠文件提供各 頻段高頻雷達所使用之方程式相關參數。 本章節選用之漢本高頻雷達站為 4.38 MHZ,參考原廠文件最接近之 5 MHz 參數進 行後續 RCS 解算。針對雷達獲取之頻譜進行船舶訊號識別後,可萃取出回波之訊雜比. (signal to noise, SNR),接著利用 AIS 資料紀錄之距離資訊帶入式 1 中求得船舶之 RCS。 針對行進間船舶,式 1 顯示船舶之 RCS 會因為船舶位於不同雷達視角下及相對距離而改 變,因此本文 4.3 節之結果討論將以散裝貨輪為例,探討船舶於行進間所對應出的 RCS 之變化特徵。. 10.
(17) 表 1 SeaSonde 提供各頻段高頻雷達相關參數. Frequency (MHz). 5. 13. 25. 42. Pt. 17 dBw. 17 dBw. 17 dBw. 14 dBw. Gt. 0 dB. 0 dB. 2 dB. 2 dB. Lc. -3 dB. -3 dB. -4 dB. -5 dB. Dr. 5 dB. 5 dB. 5 dB. 5 dB. F4 σ0. -17.1 dB. -25.8 dB. -39.8 dB. -40.1 dB. -40 dB. -38 dB. -33 dB. -32 dB. A. 77.1 dBm2. 71.2 dBm2. 65.3 dBm2. 54.5 dBm2. λ2. 36.0 dBm2. 27.2 dBm2. 21.6 dBm2. 17.1 dBm2. (4π)-3. -33.0 dB. -33.0 dB. -33.0 dB. -33.0 dB. (kT)-1. -(-204) dbws. -(-204) dbws. -(-204) dbws. -(-204) dbws. τi. 30.1 dBs. 24.1 dBs. 24.1 dBs. 21.1 dBs. (Fa)-1. -50.8 dB. -39.4 dB. -31.6 dB. -25.4 dB. 3.4 威脅等級評估 海域意識(maritime domain awareness, MDA)最主要的目標為確切掌握任何會影響海 域防衛、安全、經濟、及環境的相關資訊(Bush, 2005)。因此,本子計畫之主要目的在有 效掌握海上船舶動態資訊,以協助權責單位有效管理海域,當面臨不明船舶有海上安全 疑慮時,即能夠迅速掌握相關情資,並提出對應的處置方案。本研究項目是以雷達監測 船舶技術為基礎,針對海上監控區域內的目標實施風險評估,俾提供後續海域安全決策 參考。 本研究團隊先前於第十七屆水下科技研討會中初步發表威脅評估程序及其方法(陳 等,2015),主要利用 ADT 程序及調適性門檻的設定,從高頻雷達的距離都卜勒譜中萃取 出可能的移動目標物之回波訊號,接著針對篩選出的疑似目標訊號進行 AIS 資訊比對, 判別目標物是合作或非合作目標(non-cooperative targets)。合作目標會透過一些資訊交換 系統主動進行訊息交換;非合作目標則基於某些因素而無法被辨識,且動態無法被偵測. (Moutray & Ponsford, 2003),伴隨而來的風險也相對高於合作目標。因此為了評估非合作 目標物的威脅程度,需於 ROI 內進行風險等級劃分(見圖 7),以界定出待確認的優先順 序,其中橫軸為徑向速度,縱軸為目標物與雷達站之距離。再根據目標物與雷達站(或受 保護區域)的最小接觸距離(closest point of approach, CPA)給予風險等級,由高至低的風險 等級依序劃分為 TL I、TL II、TL III、TL IV、TL V、TL VI、TL VII、及 TL VIII。一旦 目標物落入監控的 ROI 內之不同位置時,便能夠迅速依照目標物所屬的風險等級,而界 定出目標物待確認之優先順序。. 11.
(18) Positive Low Speed. Positive High Speed. Long Distance. Distance to Radar. Negative Low Speed. TL VIII. TL VII. TL VI. TL V. Short Distance. Negative High Speed. TL IV. TL III. TL II. TL I. DC (zero radial speed). Radial Speed. 圖 7 非合作目標威脅等級評估圖 威脅等級評估流程(見圖 8)是將本系列研究之關鍵技術(包括:ASI 資料處理程序、 目標物方位測定(direction finding, DF)、及雙雷達站估算船舶位置與船速向量)進行整合, 並結合威脅等級評估概念,其目的是將高頻雷達偵測船舶技術擴展至海域安全管理及應 用層面,執行步驟如下: Receiver Chassis SeaSonde Acquisition Time Series (.ts) 1st FFT. Range Series (.rs) 2nd FFT. Cross Spectra Series (CSQ_.cs) 1. 2 MUSIC. ASI. DC removal & subregion selection Region of Interest (ROI) 2D MA filtering. voltages cross spectra averaging. Doppler bin selecting. Moving Average of CSQ in ROI Residual Series SD threshold setting. Covariance Matrix eigenvalue decompositing Eigenvalue & Eigenvector subspace type defining Signal Subspace & Noise Subspace DOA calculating. Possible Vessel Echoes. DOA estimation. cross checking with AIS Vessel Identification. angle information integrating. radial velocity providing 3 Threat Assessment Non-Cooperative Targets Threat Evaluating. Threat Levels Decision Making Support. 圖 8 威脅等級評估流程圖. 12.
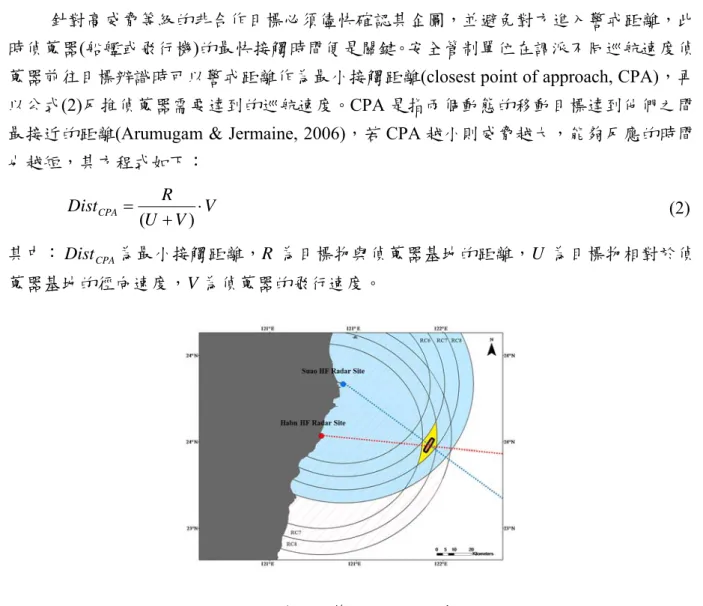
(19) 1.. 步驟一是針對距離都卜勒譜進行 ASI 處理及標準差門檻值的篩選,進而得到 ROI 內 疑似船舶回波訊號,再以 AIS 資料進行確認。船舶回波如果無法以 AIS 資料確認者 可視為非合作船舶,接著將非合作船舶之距離單元及都卜勒單元資訊送入第二步驟 進行船舶方位辨識。. 2.. 步驟二是將非合作船舶訊號進行多重訊號分類(multiple signal classification, MUSIC) 演算法,以解算出各訊號源之方向,至此可初步辨識出非合作船舶位於哪一距離單 元的確切方位。. 3.. 步驟三選擇鄰近高頻雷達站,重複執行步驟一與步驟二;接著將雙站各自推算出的 非合作船舶之方位與距離單元資訊進行整合(圖 9)。先利用前方交會法逐一定位出 非合作船舶的確切位置,接著將每一艘非合作船舶相對於高頻雷達站的都卜勒單元 資訊經公式換算為船舶徑向速度(radial velocity),然後將每艘非合作船舶相對於二 座高頻雷達站的船舶徑向速度經向量合成實際船舶速度,並可獲得實際航向。. 4.. 步驟四是將步驟三提供之非合作船舶的實際速度與空間位置轉換為相對於某一受 威脅地點的距離與徑向速度,並標示在圖 7 上,以進行非合作目標之威脅等級評估。 針對高威脅等級的非合作目標必須儘快確認其企圖,並避免對方進入警戒距離,此. 時偵蒐器(船艦或飛行機)的最快接觸時間便是關鍵。安全管制單位在調派不同巡航速度偵 蒐器前往目標辨識時可以警戒距離作為最小接觸距離(closest point of approach, CPA),再 以公式(2)反推偵蒐器需要達到的巡航速度。CPA 是指兩個動態的移動目標達到他們之間 最接近的距離(Arumugam & Jermaine, 2006),若 CPA 越小則威脅越大,能夠反應的時間 也越短,其方程式如下: DistCPA . R V (U V ). (2). 其中: Dist CPA 為最小接觸距離,R 為目標物與偵蒐器基地的距離,U 為目標物相對於偵 蒐器基地的徑向速度,V 為偵蒐器的飛行速度。. 圖9. 雙站估算船舶位置示意圖 13.
(20) 四、結果與討論 4.1 船舶偵測技術改良 調適性訊號識別模組的操作流程(圖 8 之 ASI)包含四個主要步驟,每一步驟的處理 結果可參考圖 10 所示,圖中各小圖的水平橫軸為都卜勒頻移單元,簡稱都卜勒頻率 (Doppler frequency);水平縱軸為距離單元(range cell);垂直軸為回波能量密度。 1.. 第一步驟是對原始交錯譜序列 (CSQ_.cs ,或稱原始距離都卜勒譜 (raw range Doppler spectra),見圖 10(a)) 進行 DC removal 之處理,可以將距離都卜勒譜 中位於零頻處的強烈回波能量消除,而得到圖 10(b);接著進行子區域的選定 (subregion selection),即是從圖 10(b)中框選出感興趣的區域(region of interest, ROI,圖 10(c))以進行後續分析探討。. 2.. 第二步驟是對 ROI 進行二維移動平均之平滑化處理,可以得到如圖 10(d)的移 動平均曲面,然而圖 10(a)或圖 10(b)中之一階布拉格鋒值的強烈回波經移動平 均處理後,其影響會擴及附近更多的都卜勒頻移單元,因此在第一步驟選定感 興趣的區域時應避開一階布拉格鋒值。. 3.. 第三步驟是將 ROI 內的距離都卜勒譜(圖 10(c))與其平滑化後的平均曲面(圖 10(d))相減,可得到殘差序列(residual series,見圖 10(e))。. 4.. 最後一個步驟是將 ROI 範圍內的疑似船舶訊號篩選出來,使用的方法是根據 殘差值的標準差(standard deviation)建立調適性門檻曲面,進而萃取出疑似船舶 回波訊號的局部峰值(圖 10(f))。. 圖 10. ASI 各處理步驟之結果. 14.
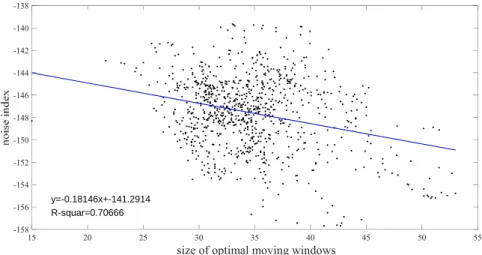
(21) 距離都卜勒譜中之零頻區附近位置具有強烈回波訊號,主要來自於雷達電磁波涵蓋 範圍內的島嶼或不具相對運動的目標物所造成(Moutray & Ponsford, 2003),此高能量之回 波會出現於都卜勒頻移單元 511 位置附近。根據 SeaSonde 高頻雷達的原廠文獻定義 DC. region 即為中心頻率(零頻)至左右兩個都卜勒頻移單元處,也就是都卜勒頻移單元為 509 至 513 之區域(Barrick et al., 2006),主要是因為直流分量(direct current, DC)為傅立葉轉換 後的第一個分量,且訊號的均值較其他數具有較高的強度,此種強烈回波能量會進而影 響到 ASI 利用「2D MA filtering」對頻譜進行濾波時,此類高能量會擴展到附近頻移單元 的移動平均值,遮蔽原本落在零頻處附近之船舶訊號。對此 DC region 利用 DC removal 進行處理,以長距型高頻雷達測站所獲取之距離-都卜勒譜的矩陣維度為 1024×32,其中. 1024 為都卜勒頻移單元(Doppler bin),32 代表距離單元(range cell, RC),DC removal 主要 是將中心零頻處以及附近能量擴展區進行能量移除動作,作法是將零頻前後各兩個都卜 勒頻移單元之回波值相加除以 2 得到補漏值,並將所得到的值填滿 DC region。此方法具 有兩大特點,一方面消除此處強烈回波對後續目標物分析所造成之影響,另一方面透過 資料補遺的動作,維持資料連續性以利於後續資料分析。. 4.2 都卜勒能譜上各 ROI 的環境雜訊與移動視窗大小之關聯性探討 本文所使用之測站資料為位於臺灣東北角之漢本長距型雷達測站,其天線陣列為. 1024×32 的矩陣,1024 為都卜勒頻移單元(Doppler bin),32 代表距離雷達站的距離單元 (range cell)。雷達訊號在不同的空間與時間下受到環境雜訊的影響程度不一,根據長時間 的頻譜資料顯示,通常漢本測站於 RC25 之後較容易會受到較強烈之電離層影響,因此 本文將 RC25 以內範圍區分為近程至遠程 ROI,以雷達距離單元從 2-8 為近域開始劃分. ROI 範圍,近域 ROI 之範圍為 RC2 至 RC8;中域之範圍為 RC9 至 RC15;遠域 ROI 之範 圍為 RC16 至 RC21,後續將以此劃分之三大區域進行後續環境雜訊與移動視窗大小的關 聯性進行探討,並透過大量數據資料回歸出各區域內環境雜訊指標所對應之最合適的移 動視窗大小,進而有利於根據區域環境雜訊特性進行船舶訊號識別。 本研究針對漢本站 2013 年 10 月 25 日至 10 月 31 日的一週雷達頻譜資料進行環境 雜訊與移動視窗大小關聯性探討,圖 11 至圖 13 分別繪製近域、中域、與遠域之兩指標 散佈圖,橫軸為移動視窗大小;縱軸為自定義之環境雜訊指標,結果顯示其決定係數(r-. squared)分別為 0.63、0.71、及 0.66,均為中高度相關,且回歸曲線呈現負相關,即存在 雜訊越高移動視窗越小之關係,其平滑程度較低表示其所建立的調適性曲面較為局部化, 此曲面能夠隨著雜訊之起伏進行彈性曲面之濾波,進而將船舶訊號萃取出來;反之,當 雜訊較低時,船舶訊號回波可能相對較大,即可用一個較大之移動視窗建構出較平滑之 曲面,將船舶訊號篩選出。圖 11 與圖 13 資料點分布較不均勻可能原因在於近岸可能會 受到地型或其他電磁波之雜訊干擾較多,遠域可能接近電離層影響範圍,因此導致資料 點分布不均。後續再針對一整個月份資料進行探討,以檢視雜訊準位與移動視窗大小是. 15.
(22) 否也與一週資料一樣呈現高度負相關性。圖 14 至圖 16 為統計 2013 年十月份之資料,其 決定係數分別為 0.61、0.65 與 0.70 呈現中高度相關,結果同樣顯示當雜訊越高所需之移 動視窗較小,建立之調適性曲面較能夠隨著紛亂之雜訊而上下變動,進而達到濾除雜訊 並將主要訊號萃取出之效果。圖 17 為 10 月份遠域之環境雜訊與移動視窗之雙座標圖, 橫軸為資料筆數,黑線對應左側縱軸為移動視窗大小;藍線對應右側縱軸為雜訊指標。 結果更能看出當雜訊越高時所需之移動視窗大小越小,以利於建立更局部化之曲面進行 雜訊濾除。此結果與先前研究所獲得之圖 4 結果相反,主要在於當小範圍看的時候有可 能碰巧有移動視窗隨著雜訊起伏之情況,例如圖 15 橫軸 40 至 45 處;但當利用長期且大 量之資料進行統計時,則明顯看出移動視窗並非與雜訊呈現正相關,反而呈現高度負相 關。此外,透過此高度相關之長期統計資料,可提供漢本測站依照所量得之環境雜訊迅 速對應出所需之移動視窗大小,能將演算法化繁為簡,並大幅提升雷達系統針對各區域 識別船舶訊號之能力。 -143 -144 -145 -146 -147 -148 -149 -150 -151 25. y=-0.094699x+-141.8919 R-squar=0.63335 30. 35. 40. 45. 50. 55. 60. 65. size of optimal moving windows. noise index. 圖 11 2013 年 10 月 25 日至 10 月 31 日之近域環境雜訊與移動視窗之散佈圖. 圖 12 2013 年 10 月 25 日至 10 月 31 日之中域環境雜訊與移動視窗之散佈圖. 16.
(23) -142 -144 -146 -148 -150 -152 -154 -156. y=-0.14769x+-143.5905 R-squar=0.66357. -158 25. 30. 35. 40. 45. 50. 55. 60. size of optimal moving windows. 圖 13 2013 年 10 月 25 日至 10 月 31 日之遠域環境雜訊與移動視窗之散佈圖 -140. -142. -144. -146. -148. -150. y=-0.11601x+-140.0184 R-squar=0.61083. -152 20. 30. 40. 50. 60. 70. 80. size of optimal moving windows. 圖 14 2013 年 10 月份之近域環境雜訊與移動視窗之散佈圖 -135. -140. -145. -150. -155. y=-0.2704x+-135.4346 R-squar=0.64601 -160 20. 25. 30. 35. 40. 45. 50. 55. 60. size of optimal moving windows. 圖 15 2013 年 10 月份之中域環境雜訊與移動視窗之散佈圖. 17.
(24) -138 -140 -142 -144 -146 -148 -150 -152 -154. y=-0.18146x+-141.2914 R-squar=0.70666. -156 -158 15. 20. 25. 30. 35. 40. 45. 50. 55. size of optimal moving windows. 圖 16 2013 年 10 月份之遠域環境雜訊與移動視窗之散佈圖 60. -135. 50. -140. 40. -145. 30. -150. 20. -155. 10. 0. 100. 200. 300. 400. 500. 600. 700. 800. 900. -160 1000. 圖 17 2013 年 10 月份之遠域環境雜訊與移動視窗之雙座標圖. 4.3 岸基高頻雷達測流系統估測船舶回波強度 4.3.1 案例分析 本節以 2013 年 10 月 25 日至 10 月 31 日期間通過漢本雷達站附近海域之散裝貨輪. (圖 18)作為分析對象,船體尺寸鎖定船長與船寬分別為 300 公尺與 50 公尺之船舶。首先 是以圖 8 之高頻雷達船舶偵測技術為基礎,從雷達頻譜中萃取出船舶相對於雷達站之距 離及徑向速度資訊(如圖 19) ,然後從船舶自動辨識系統(automatic identification system,. AIS)資料庫中比對確認此船舶回波所對應之船舶身分與類型、及其相關資訊,最後再利 用雷達方程式估算此船舶的 RCS。透過船舶偵測技術產出之頻譜與 AIS 資料交錯比對後 可發現 16 艘船舶的 153 筆動態資料,如表 2 所示,可求得每艘船在各時間點所對應之. SNR 值,且可從 AIS 資料中解算出此貨輪相對於雷達站之視角與距離,再由式 1 推算出 18.
(25) 120°56'0"E. 121°57'0"E. 24°53'0"N. ¯ ! ( ! ( ! ( ! (. ! (. ! ( ! (! ( ! ( ! ( ! ( ! ! ( ( ! ( ( ! ! ( ( ! ! ( ! ( ! ( ! ( ! ( ( ! ! ( ! ( (! ! ! ( ( ! ! ( ! ( ( ! ( ! ! ( ! ! ! ( ! ( ( ( ( ! ( ! ! ( ( ! ( ! ! ( ( ! ! ( ! ! ( ( ! ! ! ( ! ! ( ( ( ! ! ( ( ( ( ( ! ! ( !! ( ! ( ! ! ! ! ( ( ( ( ! ( ( ! ! ( ! ( ! ! ! ( ! ( ! ! ( ( ! ( ! ! !( ( ( ! ( ( ! ! ( ! ( ! ! ( ! ( ( ! ! (( ! ( ! ! ( ( ( ! ! ( ( ! ! ( ( ( (! ! ! ( ( ! ! ! ! ( ( (! ( ! ( ! ! ! ! ( ( ( ( ! ! ! ( ! ( ( ( ! ! ( ( ! ! (! ( ! ( ! ( ( ! ( ! ! ! ! ( ! ( ( ( (! ! ( ! ( ! ! ( ( ( ! ! ! ! !! ( ! ( ( ( ! ! (( ! ( ( ! ! ! ( ((! ! ( ! ( ( ! ! ( ! (( ( ! ! ! ( ! ! ( ! ( ( ! ! ! ( ! (! ( ( ( ( ! ( ( ! ! ( ( ! ( ! ! ! ( ! ( ( (! (! ! ! ! ! ( ! ( ! ( ( ( ( ! ! ( ! ! ( ! ( ! ( ( ( ( ! ! ! ( ! ( ! ( ( ( ( ! ! ! ( ( ! ! (! ! ( ! ! ( ! ( ! ! ( ( ! ! ( ( ( ( ! ! ! ( ( ( ! ( ! ( ! ! ( ( ! ! ( ( ( ! ! ! ( ( ! ( ! ! ! ( (( (! !( ! ! ! ! (! ! ( ( ( ( ! ! ! ( ( ( ( ( ! ! ( ! (! ! ( ! ! ! (! ! ( ( ( ! (! ! ! ( ( ( ! ( ! ( ! ( ! ( ! ! (! ( ! ( ! ! ( ! ! ( (! ( ! ( ! ! ( ! ( ( ! ( ! ( ( (! ( ! (!! ! ! ( ! ! ( ! ( ( ( ! ( ! ! ( ( ! !( ! ( !! ( ! ( ! (! ! ( ! ( (! ! ! ! ! ( ( ( ( ( ! ! ( ( ( ( ! ! ( ! ( ! ! ( ! ( ( ( (( ( ! ! ! ! ! (! ( ( ! ( ! ( ( ! ( ! ! ! (! ( !(!! !! ( ! ! (! ! ( ( ( ( ( ! ( ! ( (! ( ! ( ! ( ! ( ( ! ! ! (! (! ! ( ! ( ( ! ! ! ( ( ( ! ( ! ! ( ( ! ! (! ! ( ( ! (! ! ( ! ! ( ( ! (( ( ( ! ( ! ! ( (! ( ! ! ! ! ( ! ( ( ( ! ( ( ! ! ( (! ! ! ( !! (! ( (! ! ( (! ! ! ( ( ( ! ( ! ! ! ! ! ! ( ( ! ( ( ( ( ( ! ! ( ( ! ( ( ! ! ! ( ! ( ( ! ! ( ! ! ! ( (! ( ( ! ! !( ! ( ! (! (( ! ! ! ( ( ! ( (! ! ( ( (( ! ( ( ! ( ! ! ! ( ! ( ! ( ( ! ! ( ! ( ( ( ! ! ( ! ( ! ! ! ! ( ( ( ( ( ! ! ( ! ( ! ( ! ! ! ! ( ! ! ! (! ( ! (( ! ( (! ( ( ( ! ! ( ( ( ! ! ! ! ! ( ( ! ( ( ( ( ( ( ! ( ( ! ! ( ! (! ( ! !( ! ! ! ! ( ! ! ( ! ( ( ( ! ( ( ( ( (! ( ! ! ! ( ! ! ( ( ( ! ( ( ! ! ( ! ! ( ! ( ! ( ! ( ! ( ! ( ( ! (( ( ! ! ! ( ( ! ( ( ! ( ! ( ! ! ( ! ( ! ( ( ( ! ( ! ! ( ! ( ( (! ( ! ! ! ( ! ! ( ! ( ! (! ( ( ( ! ! ! ( ! ( ! ( ( ( ( ( ( ! ( !! ! ! ! ! (( ! ( ! ! ! ( ! ( ( ( ! ( ( (! ! ! ( (! ! ! ! ! ! ! ! ( ( ! ( (! ! ! ( ( ( ! ( ( ! ( ! ! ( ( ! (! ( ( ( ! ! ( ! ! ( ! ( ( ( ! ( ! ! ( ! ! ( ! ( ( ( ( ! ! ! ! ( ! ( ( ! ( ! ( ! ( ( ( ! ! ( (! ( ! ( ! ! ! ( ! ( ! ( ! ( ! ! ! ! ( (( ( (! ( (! ! ! ( ! ( !( ! ( ! ( ( ! ! ! ! !! ! ( ( ( ! ( ( ( ! ! ! ( (! ! ( ! (( ( (( ! ( ! ! ( ( ! ! ( ( ( ! (! ! ! ( ( ! ( ! ! (! ! ! ( ( ( ! (( ( ! ! (! ( ! ! ( ( ! ( ! ! ! ( ! !!! ! ( ( ( ( ( ! ! ( ! ! ! ! ( ( ( ( ( ( ( ! ! ! ! (( ! ( ! (( (! (! ! ! ( ( ! ( ! ( (! ! ( ( ( ! ( ! ! ! ! ! ( ( ! ( ( ( ! ( ! ! ! ( (! ! ! ( ( ! ( ( ( ! ! ! ! ! ( ! ! ( ( ( ( ( ! ! ( ( ! ! ( ( ( ( ( ! ( ! ! ! ! ! ( ! (! ! ( ( ! ( ! ! ( ! ( ! (! ( ! ( ! ( ! ( ! ( ! ( ( ! ! ( ( ( ( ! ! ! ( ( ! (( ( ( ! ( ! ( ! ! ! ( ! ! ( (! (! ( ! ( ! ! ( ( ! ( ( ! ( ! ! ! ! ( (! ( ( ( ! ! ! ! ! ( ( ( ( ( ( ! ( ! ( ( ! ! ! ( ! (! ! ! ( ! ( ( ( ! ( !( ( ! ! ! ! ( ! ( ( ( ( (! ! ! ! ! ! ( ( ! ! ( ( ! ( ( ( (! ! ! ! ! ! ( ( ! ! ( ( (( (! !( ! ( ( ! ! ( ( ( ( ! ! ! ( ! ( ! ! ( ( ! !! ! ( ( ! ! ( ( ( ! ! ( ! ( ! ! (! ( ! ! ( ! ( ( ! ( ( ( ! ! ( ! ! ( ( ( ! ( ! ! ( ( ( ( ( (( ! ! ( ! (! ! ( ! ( ! ( ! ! ! ( ! (! ( ( ( ( ! ( !! ! ! ( ( (! ! ! ( ! ! ! ! ( ( ( ( ! ! ( ( ! ! ( ! ( ( ! ! ( ! ! ! ( (( ! ! ( ! ! ! ! ( ( ( ! ! (( ! ( ( ( ! ( ( ! ( ! ! ( ! ( ! ! ! ! ( ( ! ! ( ( ! ( ( ( ! ( ! (( ! ! ! ! ! ( ( ( ( ! ! ( ( ( ! ( ! ! ( ( ! ( ( ! ( !( ( ! !( ! ! ! ! ! ( ( ! ( ( ( ! ( ( ( ( ! ! ! ! ( ( ! ! ( ( (( ( ! ! ! ! ! ( ( ( !! ( (( ( ! (! ( ! ! ( ! ! ! ( ( (! ! ( ! !! !! ! ! ! ! ( ( ! ( ( ( ( ! ( ! ( ! ( ( ! ( ! ! ! ! ( ( ( ( ! ! ( ( ( ! ( ! ( ( ( ( ! ! ! ! ! ( ! ( ( ( ( ! ( ( ! ( ! ! ! ( ( ! ( ( ( ! ! ( ! ! ! ( (! ! ( ( ( ! ( ! ! ( ! (( ( ! ! ( ! ( ! ( ( ! ! ( ! (( ! !! ( ( ( ! !! ! ( ( ! ( ! ( ( ! ! ! ( ! (! ( ! ! ( ! ( ( ( ( ( ! ! ! ! ( (( ( (! ( ! ! ! ! ! ! ! ( (! ( ( (( ( ( ! ! ! (! ! ( ( ( ! ( ( ! ! ! ( ( ! ! ( ! ! ( ! ! ( ! ( ( ! ( ( ( ! ( ! ! ( ! ( ( ( ! ( ! ! ( ( ( ! ! ( ! ! ! ! ( ! ( ( ( ( ( ( ( ( ! ! !! ! ( ( ! ( ! ! ! ! ! ( ! ! ( !! ( ( ( ! (! ( ( ( ! ! ! ! ! ( ! ( ( ( ( ! ( ! ( ! ! ! ! ( ! ( ! ! ( ( ( ! ( ! !( ( !! ( ! ( ( ( ! ( ( ( ! ( ! ( ( ! ! ! ( ! ! ( ( ( (! ! ! ! ! ! ( ! (( ( (( ! ( ( ! ! ( ! ! ! ! ( ( ! ( ( ( ! ( ! ! ! ( ( ( ! ( ( ! ! ! (( ! ! ! ( ! ( ( ( ( ! ( ! ( ( ! ( ! ! ! ( ! (! ( ( ! ! ( ( ! ( ! ( ! ! ! ( ! ( ! ( ( ( ! ( !! ! ! ! ( ! ! ( ( ( ( ! ( ! ! ! ! ! ( ! ! ( ( (( ( ( ( ! ! ( ! ( ! ! ((( ! ( ! ! ( ( ( ! ! ! ! ( ! ( ! ( (! ! ( ( ! ! ( ( !! ! ( ( ! ! ( ( ( ! ! ! (( ! ! ! ( ! ( ! ( ( ( ! ! ( ( ( ! ( ! ! ! ! (! ( ( ( ! ! ( ! ! ( (! ( ( ! ! ! ! ! ( ( ( ( ( ( ! ! ! ! ( ( ( ( ( ! ! ! ! ! ( ( ! (! ( ! ! ! ! ( ( ( ( ( ( ! ( ( ! ! ! ! (! ! ( ! ( ( (! ( ! ! ! ( ( ! ( ( ! ! ! ! ! (! ( ( ! ( (( ( ( ! ( ! ! ! ! ( ! ! ( ( ! ( ( ( ! ! ! ! ( ( ! ( ! ! ! ( ( ( ! ( ( ( ! ! ! ! ( ( ! ! ( ( ( ! ( ( ! ( ! ! ! (! ( ( ( ( ( ! ( ( ! ! ! ( ! ( ! (! ( ( !! ! ! ! ( ! ( ( ( ( ( ! ! ( ( ! ! ! ! (! ! ! ( (! ! ( ! ( ( ! ! ( ! ( (( ! ( ( !( ! ! ( ( (! ! ! ! (( ( (! ! ( ! ( !! ! ( (! ! ( ! ! ! ( ( ( ( ( ! ! ! ! ! ! ( ! ( (! ! ( ( (! ( ( ! ( ( ( ! ( ! ( ( ! (! ( ( ( ( ! ! ! ! ( ( ! (! ( ! ( ! (! !! ( ( (! ! ! ! ( ! ( ! ! ! ( ( ! ( ( ! (! ( ( ! ! (! ( ( ! ( ( ! ! ! ( ! ( ( ! ( ! ! (! ( ! ( ( ( ! ! ! (! ! ( ( ! ! ! ! ( ( ! (! ! ( ( ! (! ! ! ( ( ( ! ( (( ( ( ! ! ( (! ( ( ! ! ! ( ! ! ( ! ! ( ( ! ( ( ! ! ! (! ( ( ( ( ( ! ! ! ! ! ! (! ! ( ( ! (( ! ( ( ( ! (( ! ( ( ( ! ! ( ! (! ! ( ! ( ! ! ( ! ! ! ! ( ( ! ( ( ( ! ! ! ( ! ! ( (( ! ( ( ! (! ( ! ! ( ( ( ( (! ! ! ! ( ! ( ! ! ! ! ! ( ( (( ( ( ! ! ( ( ( (! ! ( ( ( ! ! ! ! ! (( (! ! ( ( ( !! ! ( ! ! ! ( ( ( ( ( ! ! ! ! ( ( ( ! ! ! ! (! ( ( ( ! ( ( ( ! ! ! ! ( ! ( ( ! (! ! ! ! ( ! ! ( ( ( ! ( ( ( ! ! ( ! ( ! ( ( ! ( ! ( ( ( ! ( ! ( ! ( ( ! ! ! ( ! ( (! ( ! ! ! ! ! (! ! (! ( ( ! ! ( ! ( ! ( ( ( ( ! ( ( ! ! ( ! ( !! ! ( ! ! ! ! ( ( (( ( ( ! ( ( ! ! ! ! (! ( ( ! ! ! ( ( ! ! ! ( ! ! ( ! ( ( ( ( ( !( ! ( ( (! ( ! ! ! ! ! ( ( ! (! ( ! ! ( ! ( ( ! ! (! ! (! ( (( ( ! ! ! ! ((! (! ! ! ! ( ! ( ( ( ( ! ! ! ( ( ! ( ! ( ! ! ! ( ( ( ! ! ! ! ! ( ( ! ( ( ( ( (( ( ( ! ( ! ! ! ( ! ( ! ( ! ( ! ! ( ! ( ( ! ! ( ( !! ( ( ( ! ! ! ( ! ! ! ( ( ! ! ( (! ! ( ( ( ! ! ( ! ( ( ( ! ! ! ! ( ! ! ( ! ( ! ! ( (! ! ( ! ( ( (! ! ! ! ( ! ( ( ! ! ( ( ( ! (( ! ( ( ( ! ( ! ( ! !( ( ( ! ( ! ( ! ! ( ( ! (! ( ! ! ! ! ( ! ( (! ! ! ( ! ! ( ! ! ( ( ( ( ( ( ! ( ! ! ! ! ( ( ( ( ( ( ( ! ! ! ! ! (! ! ! ( !! ( ( ( ! ( ( ( ( ! ! ! ( ( ! ! ( ( ! ( ! ! ! ( ! ( ! ( ( ( ! ! ( ! ( ( ( ( ! ( ! ( ! ! ( ( ( ! ! ! ( ! ! ! ( ! ( ! ( ( ( ( ( ! ! ! ( ! !! ( ( !! ( ! ! ! ( ( ( ! ! ( ( ! ! ( ! ( ! ( ! ( ! ! ( ( ! ( ( ( ( ( ! ! ! ! ! ( !! ( ( ( ( ( ! ! ( ! ( ( ! ( ! ! ( ( ( ! ! ! ! ( ! ( ( ! ( ! ( ! ( ! ! ( ! ( ( ( ( ! ! ! ! ! ! ( ( ( ( ( ( ! ( (( ! ( ! ( ( ! ! !! !! ! ! ! ! ! ( ( ( ( ( ( ! ( ( ( ! ( ! ! ( ! ! ! ( ! ( ! ( ! ( ( ( ( ! ! ! ! ! ( (( ( ( ! ( ! ! ! ! ( ( ( ( ( (( ! ! ! ! ! ! ( ( ( ( ( ! ! ! ! ! ! ! ( ( ! ( ( ( ( ! ! ! ( ( ( (! ( ! ! ! ! ! ! ! ( ! ( ( ((! ( ( ( (( ( ! ( !! ( !! ( ! ! ! ( ( ! ( ( ! ! ! ( ! ! ( ! ( ( ( ( ! ( ( ! ! ! ( ( ( ! ( ! ! ( ! ! ! ! ( ( ! ( ( ! ( ( ( ! ! ! (! (( ! ! ! ! ! ( ( ( ( ! ( ( ! ( ( ! ! ! ( ! (( ( ( ! ( ( ! ! ! ! ( ! ( ! ( ( !! ! (! (! ! ! ( ! ( (! ! ! ! ! ( ( ( ( ( ( ! ! ( ( ! ! (! ! (( ( ( ! ( ! ! ! ( ! ! ( ( ! ( ( ( ! ( ( ( ! ! ( ! ! ! ( ! ( ( ( ( ! ! ! ( ( ( ! ! ! ( ! (! (! (( ( ! ! ! ! ( ( ( ( !! ! ! ! ( ! ( ( ! (! ( ! ! ( ( ! ( ! ! ( ! (! ( ! ( ( ! ( ! ( ( ! (( ! ( ! ! ( ! ! ( ( ( ( ! ! ! ( ! ! ( ! ( ( ! ! ! (! (! ( ( ! ! ! ( ! ! ! ( ( ( ! ! ( ( (! ( (( ( ( ! ! ! ! ! ( ( ( ( ( ! ! ( ! ! ( ! ( ! (! ( ( ! ! ! ( ( ( ! ! ( ! ( ! ( ( ! ! ( ! ! ( ( ! ( (! ! ! ! ( ( ! ( ! ( ! ! ! ( ( ( ( ( ! ! ! ( ( ! ! ( ( ! ( ( ! ! ! ( ( ( ! ! ! ( ! ( ! ! ( ( ! ! ! ( ( ! ( ! ( ( ( ( ( ! ! ! ! (! ( ( ! ( ( ! ! ( ( ( ! ! ! ! ( ( ! ! ( ( ( ( ! ! ! ( ! ( ! ! ! ( ( ( ( ! ! ! ! ( ( ( ! ( ! ! (! (( ( ! ! ! ( ( ( ! ! ! ! ( ( ( ! ( ! ( ! ! ( ! ( (! ! ! ( (( ( ! ! ! ! ! ( ! ( ( ( ! ! ( ! (! ! ( ( ! ( ! ( (( ( ! ! ! ( ! ( ( ! ! ( ( ! ( ! ( ! ( ! ! ! ( ! ( (! ( ( ( ! ! ! ( ( ! ( ( ( ! ! (! ! ( ! ! ! ! ( ! ! ( ( ( ( ! ( ! ! ! ! ( ( ( ( ! ( ! ! ! ! ( ( ( ( ( ! ! ! ! (( (! ( ! ! ! ( ! ( ! ( ! ( ! ! ! ( ( ! ( ! ( ! ( ( ( ( ! ! ( ( ( ! ! ! ! ( ( ! ! ( ( ( ! ! ( ( ! ! ! ! ( ! ( ( ( ! ( ( ( ! ! ! ( ( ( ! ( ! ( ( ( !! ( ! ! ( ( ( ! ! ( ( ! ! ! ! ( (! ( ! ! ( ( ! ( ( ! ( ! ( ! ( ! ( ! (. 24°53'0"N. 119°55'0"E. 25°54'0"N. 各船舶方位所對應之 RCS 值以進行後續討論。. Habn site. 119°55'0"E. 23°52'0"N 22°51'0"N. 0. 120°56'0"E. 20. 40. 80 Kilometers. 21°50'0"N. 21°50'0"N. 22°51'0"N. 23°52'0"N. #. 121°57'0"E. 圖 18 2013 年 10 月 25 日至 10 月 31 日漢本站周邊散裝貨輪船舶軌跡動態圖. 圖 19 漢本測站在 2013 年 10 月 29 日 04:34(UTC)之船舶回波偵測結果. 19.
(26) 表2. 散裝貨輪 FAKARAZA 相對於漢本雷達站之訊雜比、相對距離、RCS、與視角 FAKARAZA SNR(dB). R(Km). σ(dB). AOV(゚). 20:13. 18.9. 91.774. 26.2. 82. 20:30. 21.5. 90.678. 28.6. 82. 20:47. 27.3. 89.679. 34.2. 84. 21:04. 28.9. 88.882. 35.7. 86. 21:21. 13.6. 88.256. 20.2. 88. 21:38. 28.1. 87.731. 34.6. 92. 21:55. 17.7. 87.529. 24.2. 95. 22:12. 13.9. 87.571. 20.4. 97. 22:30. 19.3. 87.752. 25.8. 99. 22:47. 11.9. 88.007. 18.5. 99. 23:04. 20.2. 88.294. 26.8. 101. 23:20. 17.6. 88.784. 24.3. 104. 首先利用 16 艘散裝貨輪共 153 筆資料繪製出圖 20 之 RCS 與視角及距離的關係圖, X 軸為船體相對於雷達站之視角,船首向正對雷達站角度為 0 ゚,90 ゚為船舶左側舷(port). 方向正對雷達站,-90 ゚為船舶右側舷(starboard)方向正對雷達站,180 ゚為船尾(stern)正對 雷達站之角度;Y 軸為船舶相對於雷達之距離;符號之顏色代表 RCS 值。圖中每一連續 曲線代表同一船舶運動之軌跡,可觀察到大部份連續軌跡越接近垂直視角時,其 RCS 值 相較於兩端較大。. 圖 20. 散裝貨輪之 RCS 與相對於雷達測站之距離及視角之關係. 圖 21 是只檢視圖 20 內的散裝貨輪 RCS 與雷達視角之關係,X 軸為船舶相對於雷 達站之視角,Y 軸為 RCS 值。可以清楚看到船舶在不同的雷達視角下當船舶航向接近徑 向垂直時,RCS 有較高的趨勢,且逐漸向兩邊遞減。此外,同一雷達視角下之 RCS 值存 在變異性,可能是因為不同海況下海面與電磁波的交互作用進而影響雷達偵測船舶之能 力,所以圖中選用的散裝貨輪之船體尺寸雖相近,但雷達反應的訊雜比受到不同時間的 20.
(27) 相異海況影響而會有差異,進而導致 RCS 值之變異。圖上黑色趨勢線為資料點之二次回 歸曲線,左右兩邊決定係數 R2 分別為 0.4019 與 0.5283,相關係數 R 則為 0.6334 及 0.7268, 呈現中高度相關性。 45 40 35. RCS, dB. 30 25 20 15 10. R² = 0.4019 R² = 0.5283. 5 0 -180. -150. -120. -90. -60. -30. 0. 30. 60. 90. 120. 150. 180. Aspect angel, deg. 圖 21 散裝貨輪 RCS 與雷達測站視角之關係 圖 20 與圖 21 也顯示散裝貨輪在視角±80 ゚至±110 ゚間之 RCS 值大多可達 25 dB 以 上;而在此角度區間以外之 RCS 值約為 20 dB 以下。此一結果可證實船體側舷能夠提供 較佳之電磁波反射面,進而由雷達系統接收此類船體回波訊號,且船體側舷愈垂直於雷 達徑向會使雷達獲取更高的 RCS 值。此外,從圖 20 與圖 21 的資料點皆落於 30 ゚至 150 ゚及-30 ゚至-150 ゚之間,可推論若船舶相對於漢本雷達站的視角介於 0 ゚至 ±30 ゚或 ±150 ゚至 ±180 ゚時,會因為船體在該角度下提供之雷達反射面較小,導致雷達無法有效識別該 船舶之回波訊號。因此,船體相對於漢本雷達站視角範圍介於 ±30 ゚至 ±150 ゚之間能夠 提高較佳之反射面,進而被雷達偵測到此目標物之回波訊號。 根據圖 20 之船舶距離與 RCS 值分布,同時配合雷達一個距離單元約為 8.16 公里進 行後續特定距離下 RCS 與雷達視角分析。本節根據船舶資料密度較高之特定距離,選取 雷達距離單元 6、7 與 10、11 進行後續比較討論。圖 22 及圖 23 顯示 RCS 值與雷達視角 於距離單元 6、7 下之變化,最外圍數字為雷達視角,中間垂直軸為 RCS 值,從圖中可以 看出在距離單元 6(範圍為 48.96 公里至 57.12 公里)之船舶資料落於視角 34 ゚至 144 ゚及. -60 ゚至 -130 ゚間,且於此兩端點 RCS 值為最小,於 90 ゚之 RCS 值出現最高值 29.39 dB 左右,整體平均 RCS 值為 21.44 dB。此外,距離單元 7 之船舶資料落於視角 ±31 ゚至 ±. 155 ゚間,其範圍為 57.12 公里至 65.28 公里,可參考圖 20 發現較無視角 ±90 ゚垂直徑向 之資料點。其最高 RCS 值 27.02 dB 出現於-115 ゚,整體平均較 RC6 平均值低僅有 16.85. dB。 圖 24 與圖 25 分別為另一較高資料密度區域距離單元 10 及 11 之比較,可以明顯看 出在同一距離單元各視角下不同 RCS 表現,較高之 RCS 值均出現於垂直視角附近,較 小之 RCS 值則落於可偵測視角的邊緣。例如在距離單元 10 的船舶資料落於視角 36 ゚至. 105 ゚間,RCS 極大值出現於 92 ゚附近;距離單元 11 的資料落於視角 34 ゚至 120 ゚間,其 21.
(28) 中又於 87 ゚與 90 ゚出現將近 40 dB 較高之 RCS 值。. 圖 22 RCS 與雷達視角於距離單元 6 之比較 0. 30. -30. 30 20. -60. 60 10. -90. 90. -120. 120. -150. 150 180. 圖 23 RCS 與雷達視角於距離單元 7 之比較. 圖 24 RCS 與雷達視角於距離單元 10 之比較. 圖 25 RCS 與雷達視角於距離單元 11 之比較. 22.
(29) 4.3.2 結論與建議 根據本節的統計資料可以發現當散裝貨輪相對於雷達站視角約落於 30 ゚至 150 ゚或. -30 ゚至 -150 ゚之間較能被漢本雷達站識別其訊號,若船體相對於雷達站的視角落在其他 範圍,則無法被雷達辨識出來。可能原因有二:當船舶視角接近±90 ゚時,因為船舶上層 甲板之桅杆會與相對應波長電磁波共振而產生較強之後向散射回波,使得雷達較容易偵 測到船舶;但當船舶相對於雷達站的視角太大或太小時,也就是當船首或船尾愈朝向雷 達站時,桅杆與電磁波共振作用易被遮蔽。另外原因是船首及船尾無法如船側邊提供雷 達較佳之反射面,因此在上述二項不利條件下導致雷達無法有效偵測船舶回波訊號。 當散裝貨輪右舷或左舷面向雷達站時,船舶的雷達截面積與雷達視角的二次曲線回 歸分析顯示相關係數 R 分別為 0.6334 及 0.7268,即存在中高度相關性。未來若從雷達頻 譜上辨識出疑似船舶訊號,但又無法從 AIS 確認船舶身分之非合作目標,可參考不同類 型船舶之 RCS 與雷達視角之參考曲線,例如本節求得的散裝貨輪之二次曲線回歸關係, 以推估可能的船舶類型。然後由雷達頻譜推算船速,並從雷達視角反推估船舶的約略航 向,則可初步判定非合作船舶的威脅等級 本節分別選定四種距離單元下進行船舶 RCS 與視角分析時,發現 RCS 極大值不一 定剛好出現在 90 ゚,但船舶均於視角接近垂直附近時出現極大值。未來可透過更大量資 料進行曲線回歸以及討論各類船舶之偵測情況,或者是日夜 RCS 之變化,進一步了解雷 達偵測效能以及目標物之回波強度。. 4.4 威脅等級評估 4.4.1 案例分析 2017 年 3 月 10 日在台東縣綠島鄉附近海岸線遭可疑船舶排放廢棄重油的汙染,加 上油汙受到海流流向影響,從中寮漁港以北綿延 10 公里海岸線均遭受汙染,約有 1/3 海 岸線遭重油覆蓋,北岸的珊瑚碎屑海灘和礁岩潮間帶,甚至連海底都沉積著厚重油塊, 造成生態系統極大的破壞。事件發生後海洋大學通訊與導航工程學系張淑淨教授使用交 通部運輸研究所港灣技術研究中心的 AIS 資料追蹤並研判可疑船舶,環保署與外交部也 積極追查可疑船舶,期望能遏止此違法事件。環保署綜整各方資訊後,認為油污排放時 間可能是在 2017 年 3 月 9 日 9 時至 10 時,並公布那段期間內經過綠島附近的船舶之 AIS 航跡資料(圖 26),分別是距離綠島 4.5 海浬及 6 海浬的兩艘船舶。根據新聞媒體報導,環 保署副署長詹順貴表示被鎖定的船隻是 4 萬噸等級的散裝貨輪,而本報告第 4.3 節「岸基 高頻雷達測流系統估測船舶回波強度」之研究對象同樣為散裝貨輪,因此,本節將以台 灣東部鄰近綠島之三座高頻雷達測站搭配 AIS 資料(圖 27)進行船舶訊號識別,來模擬油 汙事件發生後,肇事船隻可能關閉 AIS 訊號的狀況下,利用本系列專題研究所研發出的. 23.
(30) 技術是否能夠有效地偵測出排放油汙之可疑船舶,進而評估其威脅等級。在澳洲政府的 同意與協助下,環保署與外交部得以針對原先鎖定的船舶進行登船檢查,並排除該船排 放油污之嫌。因此本節後續之討論為避免誤導,不會將船舶資訊呈現出,只是以該船作 為情境模擬之對象。. 圖片來源:環保署. 圖 26. 環保署公布 2017 年 3 月 9 日 9 時至 10 時前後通過綠島兩側船舶軌跡圖. 圖 27. 2017 年 3 月 9 日 9 時至 10 時前後通過綠島兩側之船舶 AIS 軌跡. 4.4.2 鄰近高頻雷達測站辨識結果 國家海洋研究中心的環台高頻雷達測流系統最接近綠島中寮漁港之三座測站分別 是由北到南的綠野(LUYE)站、小野柳(SHIA)站、及旭海(SUHI)站,此三座長距型測站距 離單元解析度為 3.7 Km。圖 28 綠圈實心黑點為三座測站的位置;黑色三角形為綠島中寮 漁港位置;藍色圓圈範圍是以中寮漁港為中心的 4.5 海浬之緩衝區(buffer zone)範圍;淺 綠色實線為環保署原先鎖定的疑似船舶於 2017 年 9 時 30 分至 10 時 30 分之航行軌跡圖。 三座測站在 9 時 59 分的雷達資料所涵蓋的偵測時間是 9 時 50 分至 10 時 08 分,該船在 24.
(31) 此一偵測時間內的移動範圍是圖 28 中的紅色實線段。將三座測站在 9 時 59 分的雷達資 料利用 ASI 演算法(見圖 8)搜尋出雷達頻譜內船舶回波訊號後,接著再利用多重訊號演算 法(multiple signal classification, MUSIC ) (見圖 8)定位出船舶之方位角(以正北為 0°),可偵 測出該船舶分別位於於綠野站 188°處、小野柳站 105°處、以及旭海站 42°處,在圖 28 中 是以黑色虛線連接三測站,經詳細 ASI 與 MUSIC 之分析結果可參見圖 29 至圖 34 所示, 並說明如下: 圖 29(a)為最北邊之綠野站於 2017 年 3 月 9 日 9 時 59 分之頻譜總覽,橫軸為相對 於雷達站之徑向速度;縱軸為距離單元 RC2 至 RC30。圖 29(b)為經 ASI 處理後利用 2σ 為門檻值篩選訊號之結果,可以看出有相當多可疑回波訊號分布於頻譜內,紅色圓圈部 分為經 AIS 比對後確實為該船舶之訊號,接著將感興趣區域縮小為 RC24 至 RC30 後可 更清楚看到船舶回波訊號於 RC26 處(圖 30(b))。針對篩選出之紅色圓圈船舶訊號利用. MUSIC 對其進行方位估測可獲得如圖 30(c)之結果,橫軸為以正北為 0°之各方位角;縱 軸為訊號到達方位函數(direction of arrival, DOA),若曲線出現峰值時表示訊號從該對應 方位角進入雷達接收天線,即可判斷出目標物所在之方位角。因此,根據圖 30(c)之結果 證實船舶相對於綠野站 188°處。圖 31(a)為最接近中寮漁港的小野柳站頻譜識別結果;圖. 31(b)同樣利用 2σ作為訊號與雜訊分離之門檻值,可以更清楚看到該船舶位於小野柳站 RC6 處,換算成實際距離約為 22.2 Km 至 25.9 Km。從總譜上判別船舶訊號位於 RC6 附 近後接著將 ROI 縮小至 RC5 至 RC13 (圖 32(b))可更清楚看出紅色圓圈船舶之訊號回波。 經 MUSIC 識別後可得知船舶位於小野柳站 105°(圖 32(c)),同時也可利用圖 28 確認紅色 實線船舶軌跡確實位於小野柳站 90°以南之區域,因此根據相對位置也可進一步確認所估 測出角度為合理之數值。圖 33 為最南邊旭海測站整張頻譜識別之結果,於 RC22 處發現 該船舶訊號回波並以紅色圓圈表示之,為使更清楚看見回波訊號以及對其進行方位解算, 將 ROI 範圍縮小為 RC20 至 RC25(圖 34(b))。圖 34(c)之 DOA 函數峰值位於方位角 42° 上,代表船舶相對於旭海測站於東北方位置,進一步與圖 28 進行相對位置比對也證實估 測之船舶落於一個合理位置。 根據上述雷達估測之資訊綜整為表 3,綠野(LUYE)站、小野柳(SHIA)站、及旭海. (SUHI)站透過 ASI 可獲得船舶之距離單元及徑向速度資訊,MUSIC 則可提供重要之方位 角資訊,經比對實際 AIS 資料(表 4)之船舶上述三項資訊可發現表 3 所估測資料均落入該 範圍內,可提高演算法所獲得資訊之可信度。圖 28 即是根據表 3 之方位角資訊繪製各測 站至估測目標船舶之角度,且可看出三條線之交點落於紅色實線內,代表可利用方位角 資訊定位船舶所在位置。下一節 4.4.3「前方交會法」將會利用表三所獲得之方位角資訊 配合兩測站之經緯度座標,前方交會出船舶可能之位置經緯度,提供後續利用此一空間 位置轉換為相對於某一受威脅地點的距離進行威脅等級評估。. 25.
(32) 120°56'0"E. 121°57'0"E. ¯. SHIA ! .. ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! !. 22°51'0"N. 22°51'0"N. LUYE ! .. _ ^. #. Zhongliao Fishery Harbor. ! .. SUHI 0. 120°56'0"E. 5 10. 20 Kilometers. 121°57'0"E. 圖 28 臺灣東部鄰近綠島之三座高頻雷達測站與船舶軌跡相對位置圖. (a). (b). 圖 29 綠野站於 RC2-30 辨識結果. 26.
(33) (a). (c). (b). 圖 30 綠野站船舶訊號識別結果: (a) ASI 於 RC24-30 辨識結果;(b) ASI 以 2σ篩選結 果; (c) MUSIC 方位辨識於 188°出現峰值之結果 (a) 30. (a)Top view of ROI at 20170309 015941 in SHIA site. 25 20 15 10 5 -5. (b). -4. -3. -2. -1. 0. 1. 2. 3. 4. 5. Radial velocity (m/s). 圖 31 小野柳站於 RC2-30 辨識結果 (c). (a). Loop3 (A3) Range Cell. (b). 圖 32 小野柳站船舶訊號識別結果(a) ASI 於 RC5-13 辨識結果;(b) ASI 以 2σ篩選結 果; (c) MUSIC 方位辨識於 105°出現峰值之結果. 27.
(34) Loop3 (A3) Range Cell. (a). (b). 圖 33 旭海站於 RC2-30 辨識結果. (c). (a). (b). 圖 34 旭海站船舶訊號識別結果(a) ASI 於 RC20-25 辨識結果;(b) ASI 以 2σ篩選結 果; (c) MUSIC 方位辨識於 42°出現峰值之結果. 28.
(35) 表 3 雷達估測船舶資料統整. Information of target (distance / azimuth / radial speed). Radar sites LUYE. RC26. 188 ゚. -5.1 m/s. SHIA. RC6. 105 ゚. 1.6 m/s. SUHI. RC22. 42 ゚. 5.2 m/s. 表 4 AIS 船舶資料統整. Information of vessel (distance / azimuth / radial speed). Radar sites. LUYE. RC24 - RC26 (92.3- 98.0 Km). 186 ゚- 188 ゚. -5.1 - -5.4 m/s. SHIA. RC6 (24.2 - 25.4 Km). 102 ゚- 116 ゚. 0.03 - 1.5 m/s. SUHI. RC22 (78.3 - 84.4 Km). 44 ゚- 45 ゚. 5.2 - 5.3 m/s. 4.4.3 前方交會法 前方交會法(intersection)亦稱為交弧法,其座標計算基礎是利用兩個已知點座標及夾 角計算未知點位的座標。如圖 35 所示,已知 A、B 兩點座標,為計算未知點 P 的座標, 只需要獲取∠A 與∠B 即可利用前方交會法測定出 P 點之座標,P 點之經緯度之計算公 式如式 3 與式 4 所示: P. A. B. 圖 35 前方交會法示意圖. xp . x A sin A cos B xB cos A sin B sign ( y A yB ) sin A sin B sin A cos B cos A sin B. (3). yp . y A sin A cos B yB cos A sin B sign ( xB x A ) sin A sin B sin A cos B cos A sin B. (4). 其中 x p 與 y p 為未知點 P 點之座標; x A 、 y A 與 xB 、 y B 分別為已知 A 點與 B 點之座標,. 29.
數據



+7




相關文件
二、 獎勵金無法補助進用臨時人力:獎勵金皆由現職人員提出各項
十一、執行單位應於核定用人單位計畫後六十日內,協助完成人力遴
廠商須繳交期中進度報告及經費核銷單據等,審 查委員視計畫執行情形挑選個案進行簡報審查 或國內實地訪視或海外實地查核,以瞭解計畫執
IRB 編號 CE20018A 計畫主持人 王振宇 計畫名稱 電子病歷警示系統對改善敗血症病患預後之影響 審查意見
IRB 編號 SC19109A 計畫主持人 李奕德 通報次數 4
IRB 編號 SC19025A 計畫主持人 吳明儒 通報次數 1
IRB 編號 SF18239B 計畫主持人 李騰裕 通報次數 2
IRB 編號 SE19403A-1 計畫主持人 陳周斌 計畫名稱 大腸直腸癌患者的生活品質與創傷後成長的關係之追蹤研究 審查意見
