結合可行方向法與基因演算法於濾波器之最佳規劃
張英彬
南開技術學院電機工程系
吳啟瑞
國立台灣科技大學電機工程系
摘 要
本文提出結合可行方向法與基因演算法,探討大容量被動式諧波濾波器之 最佳規劃問題。在豐富諧波電流源情況下,所提方法可獲得濾波器之最佳方案,
並可避免系統諧波放大問題。濾波器最佳規劃是以電壓總諧波失真與電流諧波 總需量失真為最小,並考慮濾波器損失、虛功率補償與各次諧波限制條件。為 避免濾波器引發並聯共振產生諧波放大現象,於調諧點以下之諧波電流限制條 件為管制標準1/3。為驗證所提方法之有效性,實際應用在某一負載為 18 脈波 整流器化工廠,並比較三種諧波濾波器設計方案。最後,以目標函數期望值及 標準偏差反映濾波器參數失調、負載不確定性與系統阻抗變動的效應。
關鍵詞:電力品質、電力諧波、諧波濾波器、最佳化、基因演算法、可行方向 法。
APPLYING THE COMBINED FEASIBLE DIRECTION METHOD AND A GENETIC ALGORITHM TO OPTIMAL PLANNING OF HARMONIC
FILTERS CONSIDERING UNCERTAINTY CONDITIONS
Ying-Pin Chang Department of Electrical Engineering,
Nan-Kai Institute of Technology, Nan Tou County, Taiwan, 542, R.O.C.
Chi-Jui Wu
Department of Electrical Engineering, National Taiwan University of Science and Technology.
Taipei, Taiwan, 106 R.O.C.
Key Words: power quality, harmonic filter, optimization, genetic algorithm, feasible direction method.
ABSTRACT
This paper presents an approach combining the feasible direction method and a genetic algorithm (FDM+GA) to investigate the planning of large-scale passive harmonic filters. The optimal filter scheme can be obtained for a system with abundant harmonic current sources where harmonic amplification problems should be avoided. The objective is to
minimize the total demand distortion of harmonic currents and total harmonic distortion of load bus voltages. Filters loss, reactive power compensation, and constraints of individual harmonics can be considered in the design procedures. The constraints of harmonics with orders lower than the filter tuned-points have been set stricter, by one third, to avoid amplifying non-characteristic harmonics. The searching for an optimal solution has been applied to the harmonic problems in a chemical plant, where three 6-pulse rectifiers are used. Three design schemes are compared to demonstrate the performance of the proposed method. Finally, expectations and standard deviations of objective functions are used to present effects of filter parameter detuning, loading uncertainty, and changing of system impedance.
一、前 言
時值科技掛帥的今天,電力電子技術已經廣泛應用在 電腦、可變馬達速度控制、不斷電系統(UPS)、大容量之工 業用轉換器、電弧爐(arc furnace) 及靜態虛功率補償器 (static var compensator)等,這些設備常會產生大量諧波電 流[1],當諧波電流流入電力系統時,將與系統阻抗相互作 用產生諧波電壓,因而在各節點除基本波成份外,並含有 諧波電壓成份,造成電壓波形失真。諧波對於設備是有害 的,諧波曾導致電力熔絲熔斷與過電流保護誤動作。此外 因電力線中的諧波電流會感應磁場,對通訊線產生干擾問 題,影響鄰近電話線之通話品質。諧波電流有時對電力設 備不一定立即產生破壞,不過當電力系統引起串並聯共振 時,諧波問題可能會立即造成電力設備過載或影響設備之 正常運轉,例如造成電容器破壞、變壓器及電纜過載等事 故。
目前常見諧波改善方法是裝設諧波濾波器,包含被動 式濾波器與主動式濾波器,其中被動式濾波器,具有維修 容易、操作簡單與成本較低等優點,廣為工業界所採用。
最近幾年,許多學者致力於被動式濾波器之設計,文獻[2]
以傳統試誤法 (try and error) 決定濾波器容量,此種方法 不僅相當耗時,而且所求並非是濾波器最佳容量。為改善 以上缺點許多文獻陸續提出各種最佳化演算法 (optimal method),例如循序無限制條件最小化技巧 (sequential unconstrained minimization techniques) [3],不過目標函數為 非線性函數時,其極小值容易發生數值問題。針對此問題,
最近有些文獻[4-9]採用隨機直接搜尋法,文獻[4]使用模擬 退火法求解濾波器最佳容量,不過主要缺點是計算時必須 評估非常多的設計點,模擬退火法 (simulated annealing approach) 為隨機直接搜尋方法,可處理非線性和不可微分 目標函數。差分進化法 (differential evolution method) [5]
可以解決不可微分的非線性函數最小化問題,採用隨機直 接搜尋法,利用上代與下代間競爭原理,因此收斂速度較 快,然而因快速收斂特性可能使族群多樣性大幅減少,而 有過早收斂,極可能收斂至區域最佳解。而基因演算法 (genetic algorithms) [6],能夠處理任何型式種類之目標函數
及限制條件,是一種多路徑搜尋的最佳化方法,不論是線 性、非線性、連續或混合變數皆能有效求解,一種強健之 搜尋法則,文獻 [7] 利用基因演算法決定濾波器之最佳容 量,文獻 [8]利用基因演算法及處罰函數之概念,並應用 交談式模糊多目標非線性規劃法設計濾波器,並考慮系統 負載及短路容量不確定性,而文獻 [9] 以配電系統為實 例,使用靈敏度分析方法決定被動濾波器最佳位置,再根 據基因演算法計算濾波器最佳容量。
本文所探討化工廠諧波改善問題,基本上皆屬於不可 微分的非線性函數最小化問題,求解空間中,包含著許多 局部最佳解,如同許多山谷的地形,以傳統嘗試法難以處 理。有鑑於此,首先提出可行方向法 (feasible direction method) [10],能快速地收斂並找尋出最佳解。但為了避免 陷入局部最佳解,再結合基因演算法為基礎的隨機搜尋 法,從局部最佳解跳出,使得求出全域最佳解之機會大增,
迅速決定濾波器最佳容量,有效抑制諧波,並同時解決系 統共振問題。
濾波器設計時,有些不確定因素應考慮,本文以機率 概念來描述,針對可能隨機變數,給定不同機率值,最後 再以數學期望值做為濾波器規劃的依據。為驗證所提方法 有效性,本文以某化工廠為實例,模擬結果顯示能有效降 低系統諧波失真,提昇供電系統的電力品質。
二、可行方向法
可行方向法基本原理是在最佳化搜尋過程中,除了決 定搜尋方向,也考慮目標函數與限制函數的梯度,不但能 降低目標函數且不違反限制條件,因此在搜尋過程中的暫 時解皆為可行,故又稱強健可行方向法。可行方向法是利 用梯度下降法 (gradient descent method) 觀念,以微分方法 求解,所以有較快收斂速度,具有下列特點:
(一) 改善線性最佳化缺點
線性最佳化是將非線性目標函數以泰勒級數展開,再 忽略二階以上項,故其解只是近似值。可行方向法直 接檢視原始目標函數與限制函數,因而不須做線性化。
(二) 縮短求解時間
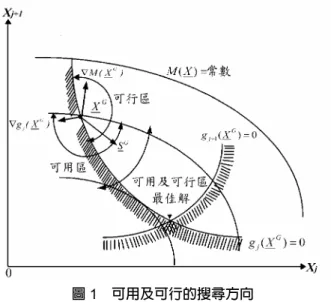
圖1 可用及可行的搜尋方向
疊代過程中的搜尋方向為可行方向,所產生的暫時解 始終在可行區內,因此短時間之內就能得到最佳解。
(三) 精確找尋最佳解
本方法具有一般性,可處理可微分目標函數及連續型 的變數。應用在濾波器設計時,能在不違反諧波管制 標準,使目標函數達最小值,精確找尋出濾波器最佳 容量值。
(四) 適合處理多種限制函數
在搜尋過程同時考慮目標函數與數個限制函數的梯 度,能在不違反限制條件下,快速找尋最佳設計結果。
一個非線性目標函數在限制條件下之最佳規劃問題為
Minimize M(X) (1)
限制條件:
0 ) X (
gk ≤ k=1,...,ng (2) 0
) X (
hk = k=1,...,nh (3) 可行方向法疊代過程為
1 α
G G G
X + =X + S (4)
由(4)式得知,求解過程是從可行變數向量XG出發,
找到一個可行下降方向SG及一個合適的步長
α
。圖 1 為可用及可行的搜尋方向,包括兩個限制條件 ( G)
g Xj 與gj+1(XG),因g Xj( G) 0≤ 時XG為有效,而 X 正位於曲線G g Xj( G)邊界上,即g Xj( G) 0= 。從幾何 意義來考量,梯度∇M ( X )G 是目標函數值 M 在X 點的G 增加方向,要滿足
( G) G 0 M X S
∇ ⋅ ≤ (5)
則SG和∇M ( X )G 夾角要大於九十度。使 M 朝下降 方向所成的空間,稱為可用區 (usable sector)。同理
G G
g ( X ) Sj 0
∇ ⋅ ≤ (6)
係指SG和向量∇g ( X )j G 夾角大於九十度,是XG滿足對 gj(XG)的可行方向,所有可行方向的空間,稱為可行區 (feasible sector)。由於XG往可用區搜尋,M 才有可能繼續 減小,而往可行區搜尋,才不違反限制條件。可用區與可 行區的交集,稱為可用-可行區 (usable-feasible sector),此 區則是由XG出發繼續搜尋,使M 朝更小的可行解範圍。
1. 找尋可用-可行區與計算步長
根據限制條件是否有作用 (active)或違反 (violated),
分成三種情況來說明 [11]。
(一) 情況一:限制條件沒有作用或違反時
一般而言,最佳化搜尋過程中希望限制條件沒有作用 或違反,所謂沒有作用即是變數向量沒有位於限制條 件曲線邊界上,所謂沒有違反即是變數向量符合限制 條件曲線 G
g ( X ) 0j < 。在可行區搜尋下一代解時,在 不違反限制條件,使M 下降搜尋方向為
( )
G G
S = −∇M X (7)
接下來計算下一步要走多遠,考慮XG 1+ 之目標函數值 M ( XG 1+ )與泰勒展開式(Taylor’s expansion),取一次 方近似值,即
( G 1) ( G G)
M X + =M X +αS (8)
M ( XG 1+ )的近似值為
1 ( )
( G ) ( G) dM XG
M X M X
d α
α
+ ≅ + (9)
如果希望目標函數值減少10%,即 ( G 1) ( G) 0.1 ( G)
M X + ≅M X − M X (10)
所估算步長為
0.1 ( ) ( )
G
est G
M X
dM X d
α
α
=− (11)
(二) 情況二:限制條件有作用但不違反時
當限制條件為非線性時,SG很容易走入不可行區。
若欲以目標函數值下降速度最快的方向為搜尋方向,
且又要不違反任何限制條件,可在(6)式中加上一個正 值因子 j
θ
,即圖2 全部疊代收斂過程
G G
j j
g ( X ) S θ 0
∇ ⋅ + ≤ (12)
此外為使搜尋方向稍遠離可行邊界,會加入一個正值 係數 − ∇ M ( X ) SG ⋅ Gθj,(12)式可改寫為
G G G G
j j
g ( X ) S M ( X ) S θ 0
∇ ⋅ − ∇ ⋅ ≤ (13)
而搜尋方向必須要使目標函數下降越快越好,換言 之,若要使[∇M ( X ) SG ⋅ G]值最小化,也就是使(14)式中的
β值最大
G G
M ( X ) S β 0
∇ ⋅ + ≤ (14)
即β≤ −∇M ( X ) SG ⋅ G,當β = −∇M ( X ) SG ⋅ G成立時β 值最大,代入(13)式可得
G G
j j
g ( X ) S θ β 0
∇ ⋅ + ⋅ ≤ (15)
整理(12)式至(15)式,可行方向法可以轉化成線性規劃問 題,即
max
β受限於G G
M ( X ) S β 0
∇ ⋅ + ≤
( G) G 0
j j
g X S θ β
∇ ⋅ + ≤ ,j∈J (16)
如SG表示成
1
G 2
n
s S s
s
=
M
每一個元素範圍皆為> -1 ≤ si ≤ 1 (i=1,2,…,n),目的在 於尋找搜尋方向,只須知道s1,s2,....sn的相對大小即可。
假設有些限制條件的梯度向量並不在臨界點時,計算 步長的方法是將目標函數對步長微分,再代入限制條件方 程式,即
1 ( )
( ) ( ) ,
G
G G j
j j j
g X g X dg X j J
d α
α
+
≅ + ∈
(17)
所估算步長為
,
( ) ( ) ,
G j
est j G
j
j
g X j J dg X
d α
α
= − ∈ (18)
再由(11)式與(18)式中選取較小值做為步長。
(三) 情況三:限制條件有一個或一個以上違反時
第G 次疊代時,即使目標函數是遞減,若違反任何限 制條件,則XG仍是不可行解,必須退回上一次疊代 的可行解,詳細說明請參閱文獻[11]。
2. 收斂至最佳點
可行方向法是以前後兩次疊代的目標函數值差的絕對 值小於某一設定值δ為收斂條件,即
( G1) ( G)
M X + −M X ≤δ (19)
其中 δ 是一極小正數值,通常設定為 0.0001,全部疊代 收斂過程如圖2 所示。
三、基因演算法
可行方向法以梯度求解非線性最佳化問題的直接搜尋 觀念,求解具限制條件最佳化問題的主要方法之一,有明 確的數學推導與理論證明,相同的初始值均可求得相同的 最佳解,具收斂速度快的優點。而本文所探討化工廠諧波 改善問題,求解被動式濾波器容量大小,皆屬於不可微分 的非線性最小化問題。廣大求解空間 (solution space) 中,
以梯度求解時,通常須做許多微分計算,不易處理龐大的 限制條件,將導致無法獲得最佳解。相對的若以隨機直接 搜尋法 (stochastic direct search method) 搜尋求解,除可克 服陷入區域解缺點之外,求得最佳解機會大為增加。目前 隨機直接搜尋法中最常見的是基因演算法,以下就基因演 算法理論做一詳細說明。
1960 年 Holland [6]提出以基因演算法來解決數學最佳 化問題,經過這些年來的發展,基因演算法已成功地應用 在 各 工 程 領 域 上 。 基 因 演 算 法 乃 模 擬 達 爾 文 進 化 論 (Darwinian evolution) 中「最適者生存」 (survival the fittest) 之規則。由於基因有擇優、交配及突變的能力,故在新生 代中的基因會是較優良,而劣質基因會漸次被淘汰。因此
圖3 結合可行方向法與基因演算法的搜尋過程
圖4 化工廠電力系統單線圖
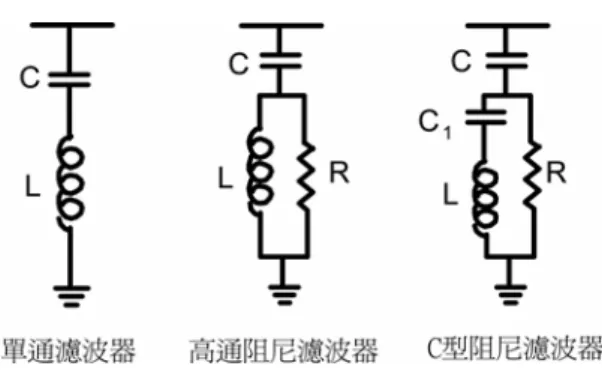
圖5 各種類型被動式濾波器之電路圖
基因演算法是採用隨機之直接搜尋方法,所求的解有別於 梯度法以斜率搜尋方式易陷入局部最佳解問題,可以獲得 接近全域最佳解。另一方面,基因演算法甚為適合處理各 種類型之函數,包含非線性與線性問題。其求解函數可為 離散、連續或混合性問題,是一種功能強大、有效率而且 甚為簡單的進化演算法。基因演算法演化過程包括三個基 本運算子(operators),分別為複製、交配及突變。這三個基 本運算子之工作原理將於下面加以介紹。
(一) 複製 (reproduction)
主要根據上一代父代(parent)族群中,選出優良之染色 體 對 應 之 適 應 函 數 (fitness) 較 高 者 , 參 與 後 代 (offspring) 中進行基因 (genes) 之交換及突變工作。
有許多方法可以用來實現複製程序,其中廣為採用的 是「輪盤法」(roulette wheel parent selection)來篩選出 優良之父代染色體而繁衍出後代染色體。此一輪盤不 同於一般的等分格輪盤,其主要特色為輪盤中每個槽 大小是根據每一個個體適應函數值大小的百分比來設 定,亦即適應函數值愈高者所佔據盤面比例愈大。
(二) 交配 (crossover)
交配是藉由兩個父代染色體間進行基因的交換,產生 另兩個後代染色體,以期產生更優良的後代。控制交 配發生的機率則由交配率 (crossover rate) Pc 負責。整 個交配過程是在交配池(mating pool)中進行,隨機地選 取低於交配率之父代染色體來進行交配。
(三) 突變 (mutation)
為了不讓染色體過早收斂至局部最佳解,必須以基因 之突變來增加染色體的相異性,但為了兼顧求解之品 質及收斂速度,我們只允許最佳的染色體進行基因突 變之程序,其做法是以隨機方式選取一個父代的染色 體,然後對二進制的位元而言是將字串由0 變成 1 或 由1 變成 0。突變發生的機率則由突變率(mutation rate) Pm 負責。由於經過突變相當於增加族群個體的變化,
突變率若太大將造成整個搜尋過程隨機化而無法收斂 到整體最佳解的後果,因此一般都將突變率設定在很 小值,以避免無法收斂。
四、濾波器最佳規劃
本節結合可行方向法與基因演算法,以二維空間為 例,搜尋過程如圖3 所示。首先以可行方向法快速解出一 個近似解,再以基因演算法求出接近全域最佳解,因此不 僅發揮可行方向法的快速搜尋能力,而且能保有基因演算 法的特性。另一方面,系統阻抗變化及諧波電流源的不確 定因素,能以機率概念來考量,找尋濾波器最合適的設計 值。製造誤差與濾波器參數失調會造成調諧點漂移,本節 以目標函數的期望值與標準差來呈現這些影響。
為證明最佳規劃方法能快速地決定濾波器容量,有效 解決系統共振問題及降低系統之諧波失真,本文使用化工 廠之實際案例,以下對工廠的背景與系統逐一做說明。圖 4 為化工廠之系統單線圖,負載為三組 30.4MVA 之 6 脈波 整流器。為減少諧波輸出量,整流器變壓器一次側安排成 各差20 度,以組合成 18 脈波整流器。為濾除諧波該廠裝 置有 5 次及 7 次濾波器。主變壓器一次側有其他負載及 385MVA 之汽電共生發電機組。主變壓器一次側以上包括 台電系統、汽電共生發電機及其他負載,以等效台電系統 阻抗(Rs+jXs)表示,此阻抗隨台電系統狀況而變化,在本
表一 化工廠整流器三種諧波電流模式 諧波電流(A)
諧波次數 1 2 3 4 5 6 7 8 9 10 模式1 1493 16 18 12 196 5 136 17 18 7 模式2 2219 35 31 27 31 13 34 18 21 13 模式3 2219 40 37 35 64 14 44 20 24 15 諧波次數 11 12 13 14 15 16 17 18 19 20 模式1 22 4 23 10 15 17 48 15 33 14 模式2 62 17 53 21 26 21 97 18 95 18 模式3 55 15 49 13 24 26 88 17 90 16
表二 化工廠模擬所使用之台電系統等效電阻與電感值
台電系統阻抗 1.39% 1.73% 3.05% 5.52% 7.62%
Rs 0.00224
Ω
0.00279Ω
0.00492Ω
0.00891Ω
0.01229Ω
Ls 0.1785mH 0.222mH 0.3916mH 0.7087mH 0.9783mH 註:Vbase=22kV、Sbase=100MVA
表三 計算系統阻抗所用測量資料與結果
測量時間(1997 5/24) 相電壓平均值(V) 三相虛功率(kVAR) 系統阻抗(%) 平均系統阻抗(%) 20:24:16 90654 23611
20:24:30 90893 18403 4.94 20:24:16 90649 23603 20:24:17 90971 18089
6.28 20:24:17 90510 23475 20:24:24 90849 16650
5.34
5.52
表四 化工廠 22 kV 側負載之功率與功率因數
負載功率 功率因數
視在功率(MVA) 實功率(MW) 虛功率(MVAR) 未裝設濾波器 裝設濾波器之後
91.2 73.87 54 0.81 1.0
文中共採用五種阻抗值,列於表二。其中1.73%與 3.05% 為 由台電所提供之最大與最小短路容量計算所得,1.39%為 台電最大短路容量加上五部汽電共生發電機全開時之阻 抗,5.52%為實際於 A 點量測切換 7 次濾波器造成的電壓 與虛功率變化計算所得,測量結果如表三所示,7.62%則 是與台電解聯時五部發電機全開時的等效阻抗。假設系統 與變壓器阻抗的品質因數(quality factor)為 30,電阻在不同 頻率時均維持固定,可能使模擬結果較為保守,尤其是在 與台電解聯時。圖 5 為各種類型被動式濾波器電路,工業 界普遍使用被動式濾波器來抑制諧波,因具有維修容易、
操作簡單、成本較低等優點。單通濾波器元件少、構造簡 單、設計容易,造價亦較為低廉,不過其濾波效果僅針對 共振點以上附近的諧波,而對於低於共振點的諧波反而會 放大,故只適用於單純諧波的場所。阻尼濾波器包括高通 阻尼及C 型阻尼濾波器,造價比單通濾波器高,且更消耗 功率,但也較能忍受系統劇烈的變化,較適合於變動性負 載及含有豐富諧波源的場所。
雖然一般皆假設六脈波整流器並不會產生偶次諧波電 流,但由表一的整流器諧波電流實測值卻顯示有少量的偶 次諧波,因此計算諧波潮流時必需包含偶次諧波。整流器
會產生偶次諧波電流,通常是因元件特性不對稱或閘流體 觸發角度上下半週不對稱所致,另外電壓波形失真時,也 會使整流器產生偶次諧波電流。由於整流器在不同負載會 流出不同諧波電流,在此考慮三種負載狀態,表一中模式 只有兩台整流器運轉,總負載為232 kA(DC),模式 2 與模 式3 均為三台整流器平衡運轉總負載為 348 kA(DC)。模式 1 諧波電流源由濾波器製造廠商測量的平均值,而模式 2 與模式3 之奇次諧波為整流器製造商所提供,模式 3 諧波 電流源的特點是在低次諧波電流量頗為可觀,模式2 和模 式3 中因平衡運轉時 5 次、7 次諧波電流互相抵消,故較 不平衡運轉時少,而17 次、19 次諧波電流因無法抵消,
且負載較重所以量亦較大。本文採用注入電流法,將整流 器以一個定電流源表示。
濾波器最佳規劃目的是要以電壓總諧波失真與電流諧 波總需量失真為最小化,並考慮濾波器損失、虛功率補償 與各次諧波限制條件,其表示如下:
(一) 目標函數
濾波器規劃問題以數學式表示為
Minimize M(X)=a×ITDD-MOF+b×VTHD-bus-m+c×PF (20)
圖6 結合可行方向法與基因演算法於濾波器最佳規 劃的計算流程
其中
20 2
2 _ .
( ) (1) 100%
m h THD bus-m
main tr
V h
V V
− =
∑
= ×(21)
20 2
2 _ .
( ) 100%
m h TDD MOF
main tr
I h
I I
− = ∑= × (22)
(二) 限制條件
諧波電壓、電流須滿足諧波管制標準,例如 IEEE Standard 519。為避免濾波器引發並聯共振產生諧波放 大現象,於調諧點以下之諧波電流限制條件為管制標 準的1/3。化工廠整流器運轉在表五未裝設濾波器時,
於責任分界點流向系統諧波電流中,5 次、7 次、17 次與19 次不符合台電諧波管制標準。
(三) 虛功率補償
每一組濾波器基本波虛功率上下限為 Fimin
max Fi
Fi Q Q
Q > > (23)
假設共裝設m1組濾波器,則位於匯流排k 的虛功率補 償為
m1
k k
F Fi
i 1
Q Q
=
=
∑
(24)總虛功率補償的要求如表四所示,使得系統功率因數 改善為1。
(四) 調諧點 ho與阻尼時間常數m (damped time constant) [4]
濾波器在欲濾除之諧波頻率時為電感性,可防止諧波 放大。調諧點限制如下
(1) 單通濾波器
0 1
1 h 2
πf LC
= (25)
* *
1 0 2
a h ≤ ≤h a h (26)
(2) 高通阻尼濾波器
0 1
1 h 2
π f CR
= (27)
2
m L
=R C (28)
2
*
0 h m m
h
1< ≤ − ,0<m<1 (29) (3) C 型阻尼濾波器
2 2 2
0
1 ( 1)[ ( 1)]
h m h h m h
h
∗ ∗ ∗
< ∗ − − − , 2
0 2
1 m h
h
∗
< < ∗
− (30)
應用所提方法,以(20)式目標函數為最小化,並滿足 諧波電壓、電流諧波管制標準及(23)式限制條件,即 可求解出濾波器基本波虛功率值。由於濾波器在欲濾 除之諧波頻率時須為電感性,以防止諧波放大,因此 基本波虛功率值必須代入(25)式~(30)式驗證,若無諧 波放大現象,方能計算出濾波器R、L、C 參數值。
(五) 機率考量
一般濾波器設計之初,會先在幾個設計點進行最佳設 計,最後再由所有設計結果作比較,以決定最後設計 值。濾波器設計時,有些不確定因素必須考慮,例如 系統阻抗會變化,不同負載狀態會產生不同諧波電 流,而且所裝設濾波器運轉後,濾波器參數失調與製 造上的誤差也會造成調諧點漂移問題,本節以目標函 數的期望值與標準差,呈現不確定因素的影響。
若X*i-j為在第 i-j 設計點的最佳解,對應之定值目標 函數為Mi-j,令m、n、k、l 分別代表諧波源模式、系統阻
表五 化工廠濾波器設計使用可行方向法的搜尋結果
濾波器型式 Q0 (MVAR) QF (MVAR) 目標函數(%)
5 次高通阻尼 11 13.73
7 次單通 17 18.63
第一設計
方案 11 次單通 26 21.64
5.19
3 次單通 9 13.55
5 次單通 10 12.46
第二設計
方案 7 次高通阻尼 35 27.99
6.92
2 次 C 型阻尼 10 12.19
5 次單通 8 11.88
第三設計
方案 11 次高通阻尼 36 29.93
5.86
表六 化工廠濾波器設計使用基因演算法在最初設計點之 MOF 諧波電流 諧波電流 (A)
裝設濾波器 基因演算法 諧波次數 未裝設
濾波器 原有濾波器
第一設計方案 第二設計方案 第三設計方案
限制 標準 (A)
2 16 17.18 7.53 7.64 7.39 22.96
3 18 25.34 3.42 24.28 25.21 91.85
4 12 139.09 4.03 7.53 7.64 22.96
5 196 96.09 58.17 52.28 45.15 91.85 7 136 27.65 31.15 51.02 27.47 91.85
11 22 10.26 1.15 4.02 1.29 45.92
13 23 11.38 2.70 2.01 3.17 45.92
17 48 25.09 8.14 3.40 11.59 32.8
19 33 17.51 5.99 4.21 9.04 32.8
(%)
TDDI 9.49 6.75 2.57 2.97 2.34 6.89 表七 化工廠濾波器設計使用基因演算法在最初設計點主變 22 kV 側諧波電壓
諧波電壓 (V) 裝設濾波器
基因演算法 諧波次數
未裝設濾波器
原有濾波器
第一設計方案 第二設計方案 第三設計方案 2 19.36 22.17 9.72 23.84 19.30 3 29.03 49.07 6.62 21.85 31.59 4 25.81 359.01 10.42 70.98 48.28 5 632.4 309.93 187.6 168.7 145.6 7 614.3 124.90 140.7 230.4 124.1 11 298.1 72.87 8.19 28.53 9.20 13 276.8 95.52 22.71 16.85 26.59 17 998.2 275.22 89.36 37.38 126.2 19 649.8 214.71 73.48 51.65 109.8
(%)
THDV 6.98 2.80 1.19 1.38 1.19
表八 化工廠濾波器設計使用結合可行方向法與基因演算法在最初設計點之結果
濾波器型式 R
(ohm)
L (mH)
C (uF)
C1
(uF)
QF
(MVAR)
ho m 濾波器
損失(kW)
目標函數 (%) 5 次單通 0.08 6.44 51.45 - 9.8 4.61 -
原有濾波器
7 次單通 0.04 3.34 50.61 - 9.5 6.45 - - 12.58 5 次高通阻尼 113.4 10 77.91 - 14.21 0.3 0.01
7 次單通 0.02 1.6 106.9 - 20 6.44 - 第一設計
方案 11 次單通 0.008 0.64 107.3 - 19.79 10.12 -
67.12 4.78 3 次單通 0.17 13.9 66.65 - 14 2.76 -
5 次單通 0.06 4.9 67.88 - 13 4.6 - 第二設計
方案 7 次高通阻尼 11.95 0.21 147.9 - 27 1.5 0.01
17.22 5.55 2 次 C 型阻尼 345.7 11.92 76.72 0.59 14 0.1 1.3
5 次單通 0.06 4.9 67.88 - 13 4.6 - 第三設計
方案 11 次高通阻尼 17.93 0.477 147.9 - 27 1 0.01
16.82 4.57
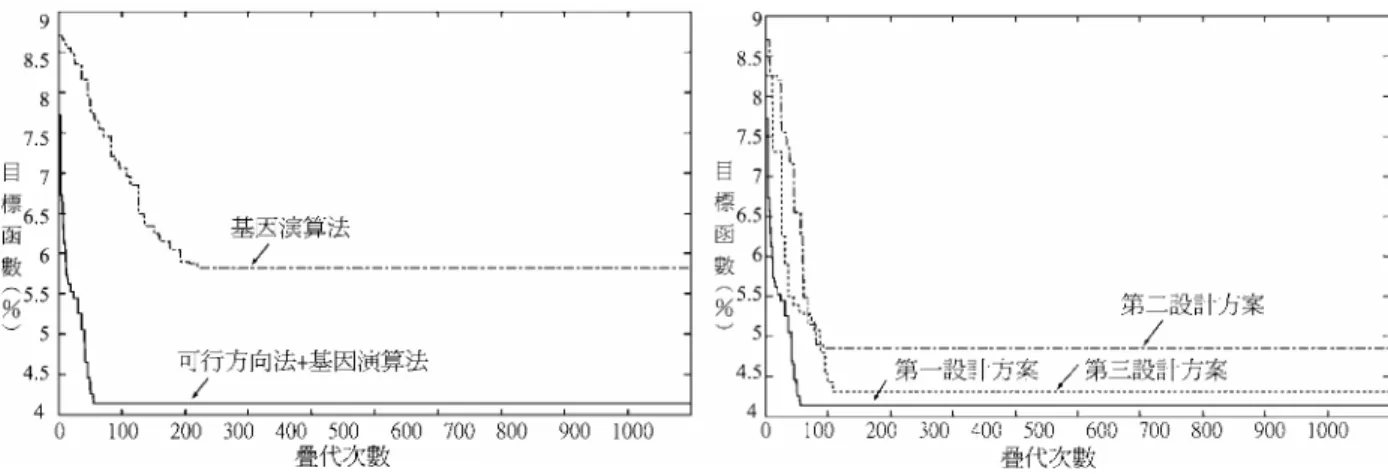
圖7 使用結合可行方向法與基因演算法與單獨使用 圖 8 使用結合可行方向法與基因演算法目標函 基因演算法在第一設計方案之收斂特性比較 數收斂特性比較
抗、濾波器電容及電感失調因數四種情況,則目標函數的 期望值為
exp( ) ( , , , ) | *
i j i j i j X Xi j m n k l
m n k l
E M M m n k l P
− = − =
∑∑∑∑
− = − − − − (31)其中Pm n k l− − − 為 m-n-k-l 運轉工作點的機率。目標函數的
標準差為
[
i j i j 2]
1/2j
i− = exp(M− −exp(M− ))
σ (32)
如果同時考慮期望值與標準差,一個新目標函數可定義為
| * i j
i j X X i j i j
M E βσ
− = − = − + − (33)
其中 β =1.96 為使得隨機變數分佈在 95%信賴區內,
β=2.621 為較小取樣數量時採用[12]。
圖6 為結合可行方向法與基因演算法應用於濾波器最 佳規劃的計算流程,說明如下:
(1) 輸入系統阻抗與諧波源資料。
(2) 建立匯流排阻抗矩陣。
(3) 判 斷 原 有 濾 波 器 在 不 同 負 載 時 濾 波 效 果 是 否 不 足,必 須 重 新 設 計 濾 波 器,若 符 合 則 進 行 可行方向法最佳化計算;反之,進 入 結 束 狀 態 。
(4) 給定濾波器容量初始解X0。
(5) 決定搜尋方向SG,疊代次數G=0。
(6) 計算步長α,本文是以由(11)式與(18)式中選取較 小值做為步長。
α若太大可能無法滿足限制條件或收斂至次佳 值,反之;
α
太小造成收斂速度過於緩慢。(7) (G+1)代變數向量XG 1+ ,如 (4) 式所示。
(8) 驗證是否滿足(19)式。
(9) 可行方向法近似解加上(Np-1)個隨機向量值,做
為基因演算法初始值。
(10) 複製。
可行方向法近似解與基因演算法產生(Np-1)個隨 機向量值,代入(20)式,目標函數值小者可複製 至子代;反之,則被淘汰。
(11) 交配。
交配是藉由兩個父代之目標函數染色體間進行基 因的交換,產生另兩個後代染色體,以期產生更 小目標函數之後代。因此控制交配發生的機率則 由交配率Pc 負責,本文設為0.8。
(12) 突變。
為了不讓目標函數過早收斂至局部最佳解,必須 以基因之突變來增加染色體的相異性,但為了兼 顧求目標函數之數值及收斂速度,我們只允許最 小的目標函數染色體進行基因突變之程序。突變 發生的機率則由突變率Pm 負責,本文設為 0.05。
(13) 疊代次數累計 G=G+1。
(14) 驗證疊代次數是否達到 Gmax=1000,若不滿足則 回到步驟10 繼續執行,直到最大疊代次數為止。
設計結果說明如後。
1. 最初設計點
最 初 設 計點 是 以最 小 短 路容量 所 得 系統 阻 抗 ZSYS
=3.05%及三台整流器平衡運轉之諧波源模式 1,電壓與視 在功率基準值分別為161kV/22kV 及 100MVA。本文使用 三種濾波器設計方案,第一設計方案分別由5 次高通阻尼 濾波器與7 次、11 次單通濾波器所組合而成。本實例由於 低次諧波污染較嚴重,因此投入一組5 次高通阻尼濾波器 以改善諧波,結果發現無法符合管制標準,故設計上須再 加入7 次、11 次單通濾波器來改善上述現象。第一設計方 案有較高濾波器損失,原有濾波器在低次諧波濾除效果也 不佳,有鑑於此,提出第二設計方案,由3 次、5 次單通
表九 化工廠濾波器設計使用結合可行方向法與基因演算法與單獨使用基因演算法在第一設計方案之比較 方法 目標函數 (%) CPU time (sec) Pc Pm Np
基因演算法 5.820 6.8
結合可行方向法與基因演算法 4.153 2.3 0.8 0.05 80 註:Pc、Pm 和 Np 分別代表基因演算法的交配率、突變率與族群數
表十 化工廠濾波器設計點 系統阻抗(%) 整流器諧波源模式
1.39 1.73 3.05 5.52 7.62 模式 1 1-1 1-2 1-3 1-4 1-5 模式 2 2-1 2-2 2-3 2-4 2-5 模式 3 3-1 3-2 3-3 3-4 3-5 表十一 化工廠整流器諧波源模式、系統阻抗與濾波器失調因數之機率分佈
機率
1 0.5 2 0.3 整流器諧波源模式
3 0.2 1.39 0.15 1.73 0.2 3.05 0.45 5.52 0.15 系統阻抗 (%)
7.62 0.05 1.0Cdes 0.4 1.02Cdes 0.2 1.05Cdes 0.1 0.98Cdes 0.2 電容
0.95Cdes 0.1 1.0Ldes 0.4 1.02Ldes 0.2 1.05Ldes 0.1 0.98Ldes 0.2 濾波器失調因數*
電感
0.95Ldes 0.1 註:Cdes 與 Ldes 代表最佳設計值
濾波器與7 次高通阻尼濾波器所組合而成,分別投入 3 次、
5 次單通濾波器以改善低次諧波,加入 7 次高通阻尼濾波 器來抑制高次諧波污染。因第一、第二設計方案分別有較 高濾波器損失與目標函數。因此再提出第三設計方案,由 2 次 C 型阻尼濾波器、5 次單通濾波器與 11 次高通阻尼濾 波器組合而成,諧波電流源集中在3 次、5 次及 7 次,所 以先投入一組2 次 C 型阻尼濾波器,模擬結果顯示只投入 2 次 C 型阻尼濾波器無法使 5 次、7 次諧波電流符合管制 標準,故再加入5 次單通濾波器結合 11 次高通阻尼濾波器 濾除高次諧波。
表五為使用可行方向法的三種設計方案搜尋結果,首 先輸入初始值
Q0,再以可行方向法快速計算出濾波器容量 次佳解。在第一設計方案,三組濾波器初始值分別為 11MVAR 、 17MVAR 與 26MVAR , 搜 尋 結 果 分 別 為 13.73MVAR、18.63MVAR 與 21.64MVAR,使功率因數改 善為 1。再將此解及(Np-1)個初始解做為基因演算法初始 值,可加速基因演算法找尋接近全域最佳解。
結合可行方向法與基因演算法的三種方案設計,模擬 結果表六~表八所示,結果說明如後。
第一設計方案:表六得知因裝設5 次高通阻尼濾波器 能抑制低次諧波電流,MOF 點 2 次、3 次、4 次諧波電流 分別大幅降至7.53A、3.42A 及 4.03A,符合調諧點以下諧 波電流限制於管制標準之1/3。5 次諧波電流降為 58.17A,
遠低於管制標準91.85 A,MOF 點 7 次諧波電流減低至 31.15A,可知濾波效果較佳。在高頻方面,受 11 次濾波器 之影響,11 次和 13 次諧波電流降為 1.15A 與 2.70A,17 次和19 次諧波電流分別改善至 8.14A 及 5.99A。表七為主 變22 kV 側之 2 次、3 次與 4 次諧波電壓,分別減低至 9.72V、6.62V 與 10.42V,已經沒有放大現象。11 次諧波 電壓更降為8.19V,高頻諧波電壓大幅降低 1/3 以上。綜合 以上所述,此方案之濾波器組合表現甚佳,TDDI 為 2.57%
遠低於管制標準之6.89%,THDV 低至 1.19%。不過由表 八得知濾波器損失高達67.12 kW,原因是濾波器發揮應有 效果,大部分諧波電流流入濾波器電阻,目標函數為
表十二 化工廠濾波器設計使用結合可行方向法及基因演算法且考慮機率時之規劃結果(*最後設計結果) M (%)i- j
設計點
(i-j) Mi j−(%) E (%)i- j σi−j(%)
β =1 .9 6 β =2.621
1-1 5.096 4.135 0.716 5.539 6.012 1-2 5.025 4.072 0.708 5.459 5.927 1-3 4.782 3.876 0.688 5.224 5.679 1-4 4.444 3.609 0.620 4.825 5.234 1-5 4.241 3.438 0.616 4.645 5.052 2-1 4.377 3.505 0.654 4.787 5.219 2-2 4.360 3.482 0.676 4.807 5.254 2-3 4.300 3.443 0.668 4.752 5.193 2-4 4.212 3.384 0.639 4.636 5.058
*2-5 4.153 3.331 0.638 4.581 5.003 3-1 4.472 3.580 0.685 4.922 5.375 3-2 4.446 3.603 0.639 4.855 5.278 3-3 4.360 3.501 0.651 4.777 5.207 3-4 4.238 3.396 0.655 4.679 5.112
第一設計 方案
3-5 4.161 3.348 0.637 4.596 5.017 1-1 5.773 4.684 0.812 6.276 6.813 1-2 5.596 4.536 0.788 6.081 6.602 1-3 5.553 4.501 0.799 6.067 6.596 1-4 5.132 4.168 0.715 5.570 6.042 1-5 4.873 3.950 0.707 5.336 5.803
*2-1 4.849 3.882 0.725 5.303 5.783 2-2 4.912 3.923 0.762 5.417 5.921 2-3 5.233 4.191 0.813 5.784 6.321 2-4 6.140 4.932 0.932 6.759 7.375 2-5 5.424 4.350 0.833 5.984 6.534 3-1 5.676 4.544 0.869 6.247 6.822 3-2 5.771 4.676 0.829 6.301 6.849 3-3 6.239 5.010 0.931 6.835 7.451 3-4 7.168 5.744 1.108 7.915 8.647
第二設計 方案
3-5 6.159 4.955 0.943 6.804 7.427 1-1 4.773 4.106 0.582 5.246 5.631 1-2 4.726 4.067 0.579 5.202 5.585 1-3 4.576 3.939 0.557 5.031 5.400 1-4 4.388 3.775 0.534 4.822 5.175
*1-5 4.309 3.706 0.525 4.735 5.082 2-1 6.471 5.562 0.790 7.110 7.632 2-2 6.423 5.534 0.787 7.077 7.597 2-3 6.294 5.415 0.765 6.915 7.421 2-4 6.238 5.367 0.757 6.850 7.350 2-5 6.344 5.464 0.777 6.987 7.501 3-1 6.737 5.795 0.825 7.412 7.957 3-2 6.709 5.767 0.816 7.366 7.905 3-3 6.653 5.727 0.811 7.317 7.853 3-4 6.743 5.807 0.826 7.426 7.972
第三設計 方案
3-5 6.996 6.016 0.852 7.685 8.249
4.78%,低於使用原有濾波器之 12.58%。
第二設計方案:由表六,因裝設5 次單通濾波器 MOF 點5 次諧波電流降為 52.28A,遠低於管制標準 91.85 A。
MOF 點 7 次諧波電流減低至 51.02A。在高頻方面,受 7 次高通阻尼濾波器之影響,17 次和 19 次諧波電流降為 3.40A 與 4.21A。表七為主變 22 kV 側之 2 次、4 次諧波電 壓稍有放大現象,分別23.48V 與 70.98V,高次諧波電壓 改善情形甚佳,主變22 kV 側之 13 次、17 次、19 次諧波 電壓分別減低至16.85V、37.38V 與 51.65V。由以上所述,
此設計方案之濾波器表現,在低次諧波改善不如理想,高 次濾波效果反而較顯著。TDDI 與 THDV 分別為 2.97%和 1.38% 雖符合管制標準,卻高於第一設計方案。不過由表 八得知濾波器損失已降至17.22 kW,目標函數為 5.55%低 於原有濾波器之12.58%。
第三設計方案:從表六中,由於裝設2 次 C 型阻尼濾
波器MOF 點 4 次諧波電流降為 7.64A。MOF 點 7 次諧波 電流減低至27.47A。在高頻方面,受 7 次高通阻尼濾波器 之影響,17 次和 19 次諧波電流降為 11.59A 與 9.04A。表 七為主變22 kV 側諧波電壓的情形,2 次顯然沒有放大現 象,其值減低至 19.3V。高次諧波電壓改善情形與第一、
第二設計方案比較較不甚理想,主變22kV 側之 17 次與 19 次諧波電壓分別減低至126.2V 和 109.8V。綜合以上結果,
此方案之濾波器表現,不論在低次或高次諧波改善皆有不 錯效果。TDDI 與THDV 分別為2.34%和 1.19%,符合管制 標準且低於第一、第二設計方案。從表八得知濾波器損失 已降至16.82kW,目標函數也改善至 4.57%。
圖7 為比較化工廠濾波器設計在第一設計方案中,利 用結合可行方向法與基因演算法與單獨使用基因演算法之 最佳化求解過程,從收斂曲線可以看出,結合可行方向法 與基因演算法與單獨使用基因演算法分別於第51 代及 219
![圖 2 全部疊代收斂過程 G G j jg ( X ) Sθ 0∇⋅+ ≤ (12) 此外為使搜尋方向稍遠離可行邊界,會加入一個正值 係數 − ∇ M ( X ) SG⋅ G θ j ,(12)式可改寫為 G G G G j jg ( X ) SM ( X ) Sθ 0∇⋅− ∇ ⋅ ≤ (13) 而搜尋方向必須要使目標函數下降越快越好,換言 之,若要使[ ∇ M ( X ) SG⋅ G ]值最小化,也就是使(14)式中的 β 值最大 G G M ( X ) S β](https://thumb-ap.123doks.com/thumbv2/9libinfo/9124733.409170/4.892.95.433.135.457/全部疊代收斂過程GXSθ∇⋅+≤此外為使值最大.webp)