國立臺灣大學電機資訊學院電機工程學系 碩士論文
Department of Electrical Engineering
College of Electrical Engineering and Computer Science
National Taiwan University
Master Thesis
改良式之雙饋式感應風力發電機之磁通估測法 An Improved Flux Estimation Algorithm for
Doubly-fed Induction Generator
鄧宇超 Yu-Chao Teng
指導教授:許源浴 博士 Advisor: Yuan-Yih Hsu, Ph.D.
中華民國 101 年 6 月
誌 謝
在台大電機所兩年的碩士班的生涯即將告一段落,指導老師許源 浴教授在專業知識及研究上的指導,讓我得以一窺電力領域浩瀚的學 問,完成碩士學位,而老師在人生態度、未來規劃上的提點與支持也 讓我獲益良多,在此誠摯的獻上我的感謝。
感謝張忠良處長、楊金石主任、陳偉倫教授撥冗擔任口試委員,
給予寶貴的意見,使本論文的缺失得以改善。
感謝永財學長、政宏學長和士鈞學長在研究上給予建議,時常正 面的鼓勵也增添了我許多信心;感謝龍安學長及柏安學長的傳承,因 為有你們建立的基礎,讓我和書廷學長順利的完成碩論;感謝家閔在 我遇到難題時總是不厭其煩的和我討論,給了我很多建議;感謝書廷 學長在這一年中時常的提醒我進度,讓我能如期的完成研究;感謝維 綱學長在當兵後也時常回來和我們噓寒問暖、對未來給予建議;感謝 學弟天桂、一麟、柏銘、靖亞打理實驗室的事務,讓我沒有後顧之憂。
感謝傑川、柏毅、名淵、哲雄、俊廷、啟原、建宏、宗豪、名志、
屠愚…你們這些大學的好麻吉,陪我逃離活大的魔爪、提供我安全的 避難場所、桌遊吃飯打屁的好對象,讓我這兩年快樂的度過。
感謝所有關心、支持我的大家,因為有你讓我這兩年過的精采而 豐富!
摘 要
本論文主要目的在研究雙饋式感應風力發電機之磁通估測改善法,
使轉子側變流器能有效控制發電機達到最大功率輸出及損失最小化。
由於純積分器在實際應用上會有初值問題及直流成分輸入等問題,而 一階低通濾波器則會造成估測之磁通相位及大小的誤差,故本文提出 了三種演算法以改善磁通估測的效能。
首先針對風力機及雙饋式感應發電機之特性進行分析,說明如何 利用定子磁通導向達到解耦合控制,再從推導出的數學公式得知磁通 估測的大小及角度對轉子側變流器控制的影響,最後分析磁通估測所 遇到的問題及利用補償架構及正交偵測器改善估測之準確性,並以 MATLAB○R 模擬驗證其效能。
關鍵字:
風力發電、雙饋式感應發電機、磁通估測、定子磁通導向、最大功率 追蹤、損失最小化
Abstract
The main purpose of this thesis is to search for methods to improve the flux estimation of a doubly-fed induction generator to allow the rotor-side converter to control effectively the generator to reach its maximum power output and minimize the power loss. Due to the problems such as initial value and DC component input of the pure integrator occurred in practical application and the deviation of the estimated flux phase and magnitude caused by the first-order low- pass filter, three algorithms were studied in this thesis to improve the efficiency of flux estimation.
First, features of wind turbine and doubly-fed induction generator were described and the way to reach decoupled real and reactive power control utilizing stator-flux oriented synchronous reference frame was explained. Then, from the deduced mathematical formula, the effects of the magnitude and phase angle of the magnetic flux estimation on the rotor-side converter control were studied. The problems associated with the existing flux estimation were identified, an alternative algorithm with the compensation structure and the quadrature detector was studied to improve the accuracy of flux estimation. Finally, MATLAB○R was employed to simulate and verify the performance of the flux estimation algorithms.
Keywords:
wind energy generation, doubly-fed induction generator, flux estimation, stator-flux oriented, maximum power tracking, loss minimization
目 錄
誌 謝 ... ii
摘 要 ... iii
Abstract ... iv
目 錄 ... v
圖目錄 ... viii
表目錄 ... xi
第一章 緒論 ... 1
1.1 研究背景與動機 ... 1
1.2 文獻回顧 ... 3
1.3 風力發電機簡介 ... 5
1.4 研究方法與目的 ... 7
1.5 論文內容介紹 ... 8
第二章 基礎理論分析 ... 10
2.1 前言 ... 10
2.2 最大功率追蹤 ... 10
2.2.1 風機功率曲線 ... 11
2.2.2 最大功率曲線 ... 12
2.3 座標軸轉換 [17] ... 14
2.3.1 靜止座標軸轉換 ... 14
2.3.2 同步旋轉座標軸轉換 ... 15
2.4 定子磁通導向控制 ... 17
2.4.1 感應馬達定子磁通導向向量控制 ... 18
2.4.2 定子磁通估測 [19] ... 21
2.5 脈波寬度調變切換技術 [20] ... 21
2.5.1 正弦波寬調變策略 ... 22
2.5.2 變流器切換頻率之分析 ... 24
第三章 轉子側變流器分析 ... 25
3.1 前言 ... 25
3.2 轉子交軸最佳解耦合電流 ... 25
3.3 轉子直軸電流命令值 ... 26
3.4 轉子側變流器控制 ... 28
3.4.1 數學模型建立 ... 28
3.4.2 轉子側變流器控制方塊圖 ... 30
第四章 磁通估測 ... 34
4.1 前言 ... 34
4.2 積分器和一階低通濾波器 ... 35
4.2.1 初值問題 [7] ... 35
4.2.2 直流偏移量輸入 [7] ... 36
4.2.3 一階低通濾波器 ... 36
4.3 磁通估測之改善法 ... 37
4.3.1 演算法一 ... 38
4.3.2 演算法二 ... 40
4.3.3 演算法三 ... 41
第五章 模擬與分析 ... 45
5.1 前言 ... 45
5.2 模擬結果與分析 ... 45
5.2.1 初值問題與直流偏差模擬 ... 46
5.2.2 演算法一與演算法二之比較 ... 50
5.2.3 演算法二及演算法三之比較 ... 53
5.3 最大功率追蹤與最小損失 ... 59
第六章 結論和建議 ... 64
6.1 結論 ... 64
6.2 未來研究方向 ... 65
參考文獻 ... 66
圖目錄
圖 1.1 定子電流型磁通估測器 ... 3
圖 1.2 定子電壓型磁通估測器 ... 4
圖 1.3 鼠籠式感應發電機架構圖 ... 6
圖 1.4 雙饋式感應發電機架構圖 ... 7
圖 2.1 不同風速下發電機轉子機械角速度對風機機械功率曲線 .. 12
圖 2.2 最大功率曲線圖 ... 13
圖 2.3 三相定子電壓空間向量圖 ... 14
圖 2.5 同步旋轉座標轉換軸 ... 16
圖 2.6 同步旋轉座標轉換向量圖 ... 17
圖 2.7 感應發電機動態 d-q 軸等效模型 ... 19
圖 2.8 電壓型變流器 ... 22
圖 2.9 正弦波寬調變示意圖 ... 23
圖 3.1 最小銅損之解析法流程圖 ... 27
圖 3.2 實虛軸與 dq 軸轉換示意圖 ... 28
圖 3.3 轉軸、轉子電流與同步旋轉軸之關係圖 ... 30
圖 3.4 解耦合後的轉子 d 軸電流控制方塊圖 ... 31
圖 3.5 轉子側變流器控制方塊圖 ... 33
圖 4.1 一階低通濾波器示意圖 ... 37
圖 4.2 演算法一磁通估測補償器 ... 39
圖 4.3 磁通飽和限制器 ... 39
圖 4.5 演算法三:正交偵測補償架構 ... 42
圖 4.6 和 向量關係圖 ... 43
圖 5.1 磁通理論值和積分器估測值比較 ... 46
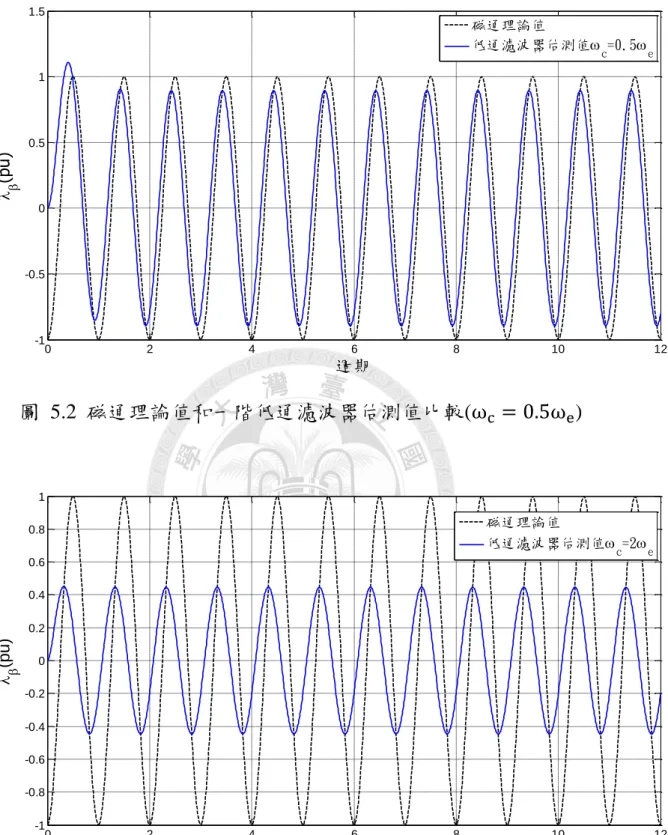
圖 5.2 磁通理論值和一階低通濾波器估測值比較( ) .... 47
圖 5.3 磁通理論值和一階低通濾波器估測值比較( ) ... 47
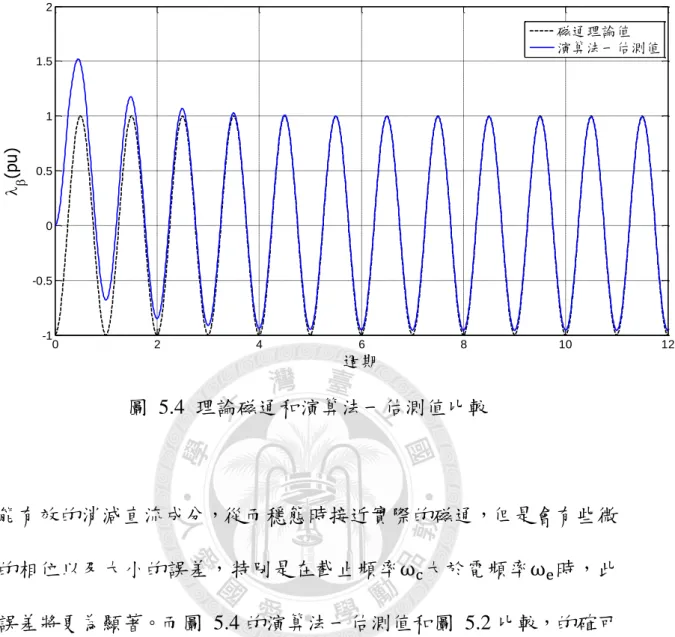
圖 5.4 理論磁通和演算法一估測值比較 ... 48
圖 5.5 直流偏差─積分器估測磁通 ... 49
圖 5.6 直流偏差─演算法一估測磁通 ... 49
圖 5.7 磁通理論值與演算法一估測值(L=0.2) ... 51
圖 5.8 磁通理論值與演算法二估測值(L=0.2) ... 51
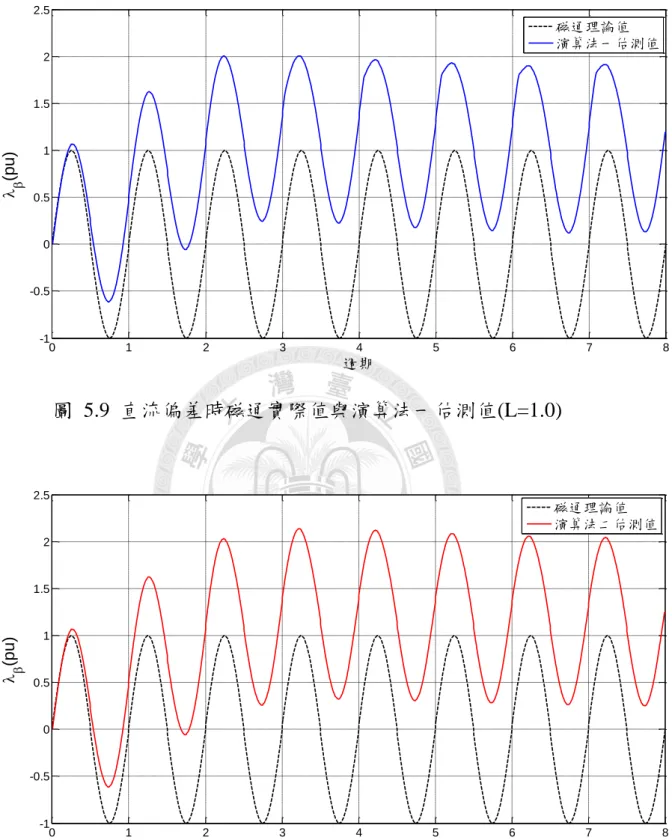
圖 5.9 直流偏差時磁通實際值與演算法一估測值(L=1.0) ... 52
圖 5.10 直流偏差時磁通實際值與演算法二估測值(L=1.0) ... 52
圖 5.11 演算法三─電動勢和磁通角度差 ... 53
圖 5.12 磁通理論值和演算法三估測值 ... 54
圖 5.13 演算法三磁通補償量大小 ... 54
圖 5.15 磁通變動─積分器估測結果 ... 56
圖 5.16 磁通變動─演算法二估測結果 ... 56
圖 5.17 磁通變動─演算法三估測結果 ... 57
圖 5.18 磁通變動─演算法三估測結果(PI 參數設定值差) ... 57
圖 5.19 磁通變動─演算法二、演算法三比較 ... 58
圖 5.20 考慮定子電阻下,磁通估測比較 ... 60
圖 5.21 考慮定子電阻下,d 軸轉子電流比較 ... 60
圖 5.22 考慮定子電阻下,q 軸轉子電流比較 ... 61
圖 5.23 考慮定子電阻下,發電機總輸出功率比較 ... 61
圖 5.24 考慮定子電阻下,發電機總損耗比較 ... 62
圖 5.25 考慮定子電阻下,風機輸出功率比較 ... 62
表目錄
表 1.1 不同形式風力發電機比較 ... 5
表 5.1 模擬參數值設定表 ... 45
表 5.2 風機參數 ... 59
表 5.3 雙饋式感應發電機參數 ... 59
1
第一章 緒論
1.1 研究背景與動機
近幾年來,由於氣候變遷及能源危機對人類帶來的警訊,讓各國 政府紛紛思考如何節能減碳,為地球的永續發展盡些力量,其中為減 少對石化能源的依賴性,有些國家便轉而求救於核能發電,以達減碳 及降低成本的效果,惟自 2011 年 311 的日本福島核災以後,許多國 家原本雄心勃勃的擴核計劃,都大大地受到質疑,極有可能會「棄核 轉再」,讓再生能源的發展有更大的空間。由於風能與太陽能為取之 不盡,且為無汙染的能量來源,故「風力發電」與「太陽能發電」成 為再生能源重要的發展方向。
從減碳的目的來看,依據永續能源政策綱領 [1],全國二氧化碳 排放減量目標,期望於 2016 至 2020 年間能回到 2005 年排放量,於 2025 年回到 2000 年排放量。因此,台灣致力於再生能源的推廣,藉 此降低二氧化碳的排放量,並期望於 2025 年再生能源能占發電系統 的 8%(即裝置容量占 15%)以上,而其中風力發電有 4.22%發展配 比 [2]。
台灣是海島國家,風力資源良好,每年有半年以上的東北季風期,
沿海、高山及離島許多地區的年平均風速皆超過每秒 4 公尺,故風力
發電是目前台電致力發展的主要再生能源項目。根據調查,台灣年平 均風速每秒大於 4 公尺的區域,總面積佔 2,000 平方公里。台灣雖然 有豐富的風力資源,但由於地勢影響,能夠建設風力發電廠的只有西 部,但有些地方因風力不穩定不適合開發,有些地方則是地狹人稠不 適合興建,再加上風力機若設置太密集會互相干擾,又怕噪音擾民,
因此,估計陸上可開發的風能潛力為 120 萬瓩。
此外,台電也積極研究在海上建造風力機的可行性,但由於只能 興建在近海(海水深度過深便不能建造風力機),還有矗立在海上的 風力機會影響漁民捕魚、阻擋貨輪通行等問題,初步估計海域可開發 的風能潛力估計為 300 萬瓩。台灣陸上與海可開發的風能潛力總計為 420 萬瓩,此對日漸短絀的能源開發有相當助益。
如能有效的利用此得天獨厚的風力資源,將可大為提高國內乾淨 能源的比例,因此,以風力驅動的發電機模組與電力系統互聯的系統 儼然成為國內一個熱門的研究方向。
1.2 文獻回顧
在發展風機上,近年來雙饋式感應發電機已逐漸普遍,且在穩態 運轉點的控制上已可達到解耦合控制。在實功控制方面,利用轉子的 q軸電流控制命令可達到風機的最大功率追蹤;在虛功控制方面,則 可透過轉子d軸電流控制命令的控制達到損失的最小化。
而交流發電機為達到解耦合的控制,使用定子磁通導向的控制理 論,故估測的磁通大小、相位之準確性便會影響其控制的效能。而磁 通的估測方式可分為電流型和電壓型兩種 [3], [4], [5],如圖 1.1、圖 1.2所示,電流型估測器需要較多的發電機參數,如互感、轉子電阻…
等,且在低速時受到電阻變化的影響,在高速時則受互感的影響;電 壓型估測器則僅須定子電阻,但在低轉速時定子電阻溫升變化影響及 低輸入定子電壓會影響其估測之性能。
r
Lm
i
sp 1
sr
r m
L L Ls
圖 1.1 定子電流型磁通估測器
Rs
i
sv
sp 1
s圖 1.2 定子電壓型磁通估測器
但不論是電壓型或電流型估測器,均是建立在積分器的架構上,
從參考文獻中可以得知積分器的初值問題以及直流偏移量容易造成 估測的磁通產生誤差 [6], [7],故往往以一階低通濾波器取代積分器 之架構,但是低通濾波器截止頻率的設計又會造成磁通估算量大小與 相角的誤差,特別是在低轉速操作時影響更為明顯。而針對此問題有 不少論文提出解決與改善方法 [4], [5], [8], [9],其中多半是以補償器 架構來改善磁通估測的準確性,在本論文中則應用了濾波器回授補償 器架構 [4],以正交偵測的方式將誤差經過一比例積分控制器達到補 償的效果,以解決低通濾波器在低轉速操作下的產生的問題,使發電 機能準確的操作在最大功率及最小損失點上。
本論文將此改善方法以MATLAB進行模擬驗證其可行性及準確 性後,再利用於雙饋式感應發電機中,以有效的達到最大功率追蹤及 最小損失的控制。
1.3 風力發電機簡介
常見的交流發電機主要分為同步機(Synchronous machine)及感應 機(Induction machine)兩大類,前者的激磁場是由直流電源所提供,但 後者之激磁場則用電磁感應原理在轉子繞阻產生磁場 [10]。然而由 於風是一種不穩定之能量,隨著風速不同發電機之轉速也不同,故相 較之下,感應發電機比同步發電機更適合用於風力發電 [11]。而感應 發電機又分鼠籠式發電機和繞線式發電機兩種,其比較如表 1.1 [12]
表 1.1 不同型式風力發電機比較表
鼠籠式感應機 繞線式感應機 同步機
結構 簡單 簡單 複雜
控制方式 無 複雜 簡單
功率半導體容量 無 較小 較大
價格 低 中 高
鼠籠式感應發電機如圖 1.3 所示。其結構簡單,由於轉子短路,
定子直接併接於輸配電網之匯流排上,所以不需要任何控制電路即可 將電力傳送至電力網路,也因此價格低廉,適合大量裝置在風力資源 豐沛的地區。不過當轉速低於同步轉速時,鼠籠式感應發電機無法發 出電力,且風速不穩時會連帶影響電力傳輸系統的穩定;此外,在電 力系統發生故障時,也沒有任何支撐系統電壓的能力。故一般在定速、
定頻之系統中常使用鼠籠式發電機。
鼠籠式 感應發電機
定子
圖 1.3 鼠籠式感應發電機架構圖
繞線式感應發電機因為轉子側與定子側皆可允許電力潮流流動,
因此又稱為雙饋式感應發電機 (Doubly-Fed Induction Generator,
DFIG) , 如 圖 1.4 所 示 。 感 應 機 轉 子 線 圈 接 到 一 組 背 對 背 型 式 (Back-to-Back)的變流器,再與電力系統連接,兩者以直流電容器為 分界,靠近系統端的稱為定子側(Grid Side),直接接到電力系統,靠 近發電機轉子端的稱為轉子側(Rotor Side)。定子側變流器本質上即是 一個靜態同步補償器,可對系統責任分界點提供穩定電壓的效果,並 在發生加載、減載或故障時對電壓支撐分擔一部份責任;轉子側可經 由適當的電壓控制,便可使發電機在同步速度以下發電,送出電力至 系統,並可進行最大功率追蹤(Maximum Power Point Tracking,MPPT)。
而發電機所產生之電力大部分由定子側流出,轉子側只流經少量的電 力,故所需功率半導體之容量只需發電機額定容量的 20% ~ 30%,可 大幅減少轉換器所需之成本。因為雙饋式感應發電機的控制方式複雜,
相關的控制理論也成為目前熱門的研究之一。故相較於鼠籠式發電機,
在變速、定頻系統中繞線式發電機可藉由轉子端控制,保持與電網同 步,是較佳選擇。
雙饋式
感應發電機 變流器 變流器 定子
轉子
圖 1.4 雙饋式感應發電機架構圖
綜合以上分析,本論文目的在擷取最大風能及損失最小化之下操 作,故選擇轉子側可控制之繞線式發電機,使發電能力更強、轉速範 圍更廣 [13]。
1.4 研究方法與目的
本論文使用 Pena [14]提出的雙饋式感應發電機之架構,進行轉子 端電流控制,由於使用定子磁通導向必須估測磁通的大小及其角度,
其估測之準確性將影響控制之效果,故以 [4]所提出的磁通估測法,
改善原先的積分器所作的磁通估測,並利用 MATLAB○R /Simulink 軟 體模擬比較此法的效果。再根據脈波寬度調變切換技術、雙饋式感應 發電機理論分析與風機特性,建構出最大功率追蹤以及最小銅損之控 制策略,模擬磁通估測之準確性對控制的影響。
1.5 論文內容介紹
本論文內容包含六個章節,簡介如下:
第一章 緒論:
說明本論文之研究背景、文獻回顧、風力發電機簡介、研究 方法與目的。
第二章 基礎理論分析:
本章介紹風力機能量擷取的原理、同步旋轉座標軸的轉換技 術及定子磁通導向的推導和脈波寬度調變技術。
第三章 轉子側變流器分析:
本章利用定子磁通導向技術及直交軸的解耦合控制概念,分 別以最大功率追蹤及發電機銅損最小化,求出直交軸電流的 命令值,再利用前饋補償原理,建立數學模型,並推導控制 方塊圖。
第四章 磁通估測:
使用純積分器估測磁通,會產生直流成分及初值問題,本章 先就此兩問題作介紹,並分析經常用來取代純積分器的一階 低通濾波器,接著將三個改善型的磁通估測器分別介紹,並 比較其改善的效果及問題作討論。
第五章 模擬與分析:
本章首先將上章分析之磁通估測架構分別以 MATLAB○R /Simulink 軟體模擬,以驗證其正確性,並模擬使用不同架構 下的磁通估測結果,運用於轉子側電流控制的影響。
第六章 結論和建議
綜合以上章節之結果作一總結性的說明,並提出未來改進及 值得研究之方向。
2
第二章 基礎理論分析
2.1 前言
近來由於能源危機及環保意識抬頭,再生能源極受各國重視,其 中風力發電為再生能源發展中成長最快速者之一,風力發電成本也在 技術發展日益成熟下大幅下降,可與傳統發電競爭,且污染性少,極 受人們重視。
而在發展風機上,近年來雙饋式感應發電機已逐漸普遍,且在穩 態運轉點的控制上已可達到解耦合控制。在實功控制方面,利用轉子 的 q 軸電流控制命令可達到風機的最大功率追蹤;在虛功控制方面,
則可透過轉子 d 軸電流控制命令的控制達到損失最小化。
2.2 最大功率追蹤
在一截面積為 的風洞下,若有風速為 的空氣流過,則在 秒內 流經風洞的體積為 ,質量為 ,其中 為空氣 密度。根據空氣動力學理論 [15],風洞內風速為 、質量為 的空氣 其動能為
(2.1)
風洞所截取的功率則為
(2.2) 然而,風機葉片所能截取的風能除了與風洞所截取的風能有關之外,
也與功率係數 有關,其關係如下:
(2.3) 然而,功率係數 又與葉尖速度轉速比 及葉片旋角 有關,其關係 如下:
(2.4)
(2.5)
在正常情況下,我們會把葉片旋角調至 0°,以得到較高的轉換效率,
考慮 ,代回(2.5)式
(2.6) 其中 為風機葉片角速度, 為風機葉片半徑, 為功率係數的 最大值(由 Betz limit 知最大功率係數為 0.593 [16]), 和 則與風機 運轉點的設計有關。
2.2.1 風機功率曲線
為繪製發電機轉子機械角速度對風機機械功率之曲線圖,須先定 義齒輪比 如下
(2.7) 其中 為發電機轉子機械角速度。由式(2.4)及式(2.7)可得
(2.8) 代入式(2.3)
(2.9) 根據(2.9)式,可繪製發電機轉子機械角速度對風機機械功率之曲線圖。
如圖 2.1,不一樣的風速對應到不一樣的風機機械功率曲線。
圖 2.1 不同風速下發電機轉子機械角速度對風機機械功率曲線
2.2.2 最大功率曲線
如圖 2.1,在某特定的風速下,風機運轉在某特定的轉子機械角
0 20 40 60 80 100 120 140 160 180
0 500 1000 1500 2000 2500 3000 3500
ωr(rad/s) P m(W)
Vw=4 Vw=5 Vw=6 Vw=7 Vw=8
速度可截取最大功率,此時所對應的功率係數即為 ,所截取的 機械功率則為:
(2.10)
(2.11) 由(2.10)式可知,最大功率曲線為轉子機械角速度的三次曲線,將其 繪於圖 2.1 上可得圖 2.2 之最大功率曲線圖。
圖 2.2 最大功率曲線圖
0 20 40 60 80 100 120 140 160 180
0 500 1000 1500 2000 2500 3000 3500
?r(rad/s) Pm
(W)
Vw=4 Vw=5 Vw=6 Vw=7 Vw=8 Kopt×ωr3 (W)
(rad/s)
2.3 座標軸轉換 [17]
在三相系統中以定子電壓為例,若各相電壓分別為 、 、
的弦波,則所合成的空間向量 如圖 2.3 所示,該圖中 的 合成向量將變成一個大小固定且隨著弦波角速度逆時鐘旋轉的向量,
在不同座標系統轉換下,可分別得到合成向量在直軸(d-axis)和交軸 (q-axis)的分量,如此將能有效的簡化發電機的動態方程式。故座標軸 轉換關係在發電機的控制系統設計上相當重要,為方便控制器的設計,
選擇適當的座標系統,將會有助於發電機特性分析及控制的設計。
v
as(t) cs
as v
s(t)
bs
v
bs(t)e
j2/3πv
cs(t)e
j4/3π圖 2.3 三相定子電壓空間向量圖
2.3.1 靜止座標軸轉換
將上述的電壓空間向量投射到二維垂直座標系統( )中,其中 軸( -axis)和 相重合,並考慮此座標軸靜止不動,所以稱為靜止座 標軸轉換,如圖 2.4。
v
αsc-axis
a-axis v
sb-axis
v
βsα-axis
β
-axis
ω
圖 2.4 靜止參考座標
a、b、c 三相系統和靜止座標軸轉換之關係可表示為
(2.12)
式中 可以表示為電流、電壓或磁通,轉換矩陣 定義為
(2.13)
的反矩陣存在,並如下式(2.14)所示
(2.14)
2.3.2 同步旋轉座標軸轉換
將座標軸以合成的空間向量之角速度( )旋轉,則如圖 2.5 所示,
由於 d 軸與 q 軸以同步轉速旋轉,所以空間向量和座標軸之間的相對 位置關係不變,導致 d 軸和 q 軸的分量也不會因此而改變。
c-axis
a-axis space vector b-axis
ω ω
θ=ωt d-axis q-axis
圖 2.5 同步旋轉座標轉換軸
a、b、c 三相系統和同步旋轉座標軸轉換之關係可表示為
(2.15)
式中 可以表是為電流、電壓或磁通,轉換矩陣 定義為
(2.16)
T 的反矩陣存在,並如下式所示
(2.17)
由(2.15)式,空間向量 轉換到 d 軸及 q 軸的分量分別為 、 , 如圖 2.6,則 的大小為 ,而和 d 軸的角度為 。
c-axis
a-axis f
sb-axis
ω
θ=ωt
d-axis q-axis
f
df
qα
圖 2.6 同步旋轉座標轉換向量圖
2.4 定子磁通導向控制
向量控制已廣泛的應用在交流發電機的控制上,其能藉由上節的 座標轉換技巧,將發電機的三相系統轉換至直交的兩軸座標系統,從 而達到解耦合、線性化的控制。
欲達成向量控制,首要的便是獲得磁通的角頻率 及其角度 ,
在決定磁通的位置後,將該位置定為同步旋轉座標的 d 軸,則 q 軸磁 通分量將為零,此即向量控制的先決條件。而磁通的角頻率和角度有 兩種方法求得,其一為間接式向量控制,先估算滑差角頻率 ,加 上所量測到的發電機轉軸電氣轉速 ,即可獲得 ,再經積分即可 得 ;本論文則採用第二種方法,直接估測磁通的角頻率及角度,稱 之為直接向量控制。
2.4.1 感應馬達定子磁通導向向量控制
為將交流值轉換為直流值以利分析,將所有三相弦波利用同步旋 轉座標軸轉換至一頻率為 旋轉之 dq 軸。配合圖 2.7 繞線式感應發 電機動態模型 [18],轉換後可得以下之電壓及磁通關係式如下
(2.18)
(2.19)
(2.20)
(2.21)
R
s
e
qsL
mqr r
e
)
(
Llri
dsi
dr
R
r
v
dr
v
qsL
mdr r
e
) ( Llr
i
qsi
qr
R
r
v
qrd-axis
q-axis
v
dsL
lsR
s
e
dsL
ls
ds
qs
圖 2.7 感應發電機動態 d-q 軸等效模型
以上所有轉子側數據均已轉換到定子側,即 、 、
、 、 ,其中 為定子線圈匝數,
為轉子線圈匝數, 為滑差轉速(slip speed), 為轉子電氣轉 速 (2.22) 再經由功率為轉矩與轉速乘積關係可求得電磁轉矩
(2.23)
P為發電機的極對數(pole pairs)。由圖 2.7知定子側電流流出為正;轉 子側電流流入為正。
定子磁通導向下將d軸定位在定子磁通( )之合成空間向量上:
(2.24) 將(2.24)代入(2.18)、 (2.19)、 (2.20) 假設 為定值,且定義
, ,可得 [14]
在定子磁通導向的控制下,透過以上推導,轉矩可簡化為下式:
因為忽略定子端電阻,所以 可視為定值,則電磁轉矩僅為定子q軸 電流的單變數函數,且成正比關係,如此一來,透過定子磁通導向控 制,可藉由定子q軸電流控制發電機的實功輸出以達到最大功率追
2.4.2 定子磁通估測 [19]
在靜止參考座標下,將式(2.18)以 代入,並以空間向量表 示可得定子電壓方程式
(2.31) 由上式即可得到最簡單的定子磁通估測器如下
(2.32) 這是利用定子電壓扣除定子電阻壓降後積分而得,稱為定子磁通的電 壓型估測器,其中 為定子端的電動勢( )。此估測器在低 轉速時,受定子電阻溫升變化及低輸入定子電壓影響性能極大,往往 以一階的低通濾波器取代,但仍有相角偏差的問題產生,將於第四章 詳細討論。
2.5 脈波寬度調變切換技術 [20]
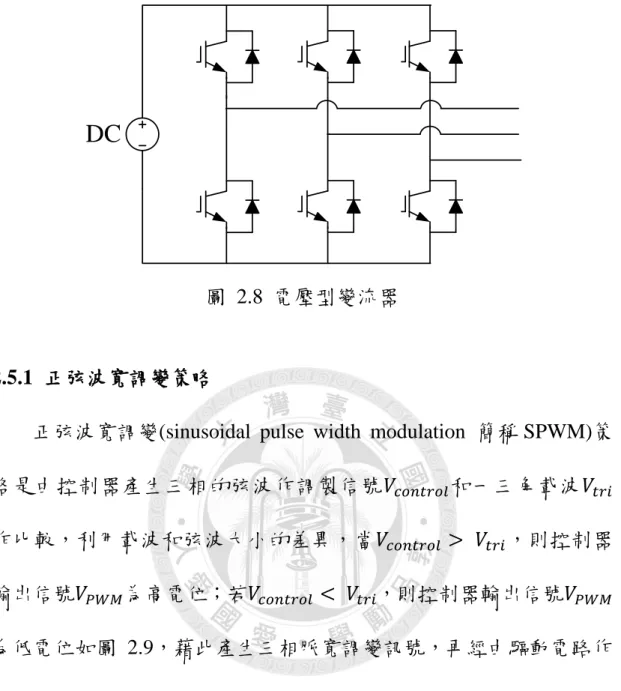
脈波寬度調變(Pulse Width Modulation,PWM)是由控制器所產生 的調制信號與載波信號比較,產生變流器中功率半導體開關的切換信 號,以驅動交流發電機運轉。本論文變流器架構採電壓型變流器 ( Voltage Source Inverter, VSI),其相對於電流型變流器好處有成本低、
重量輕、體積小、響應快,且不會產生過大的湧入電流。電壓型變流 器架構如圖 2.8 所示。
DC
圖 2.8 電壓型變流器
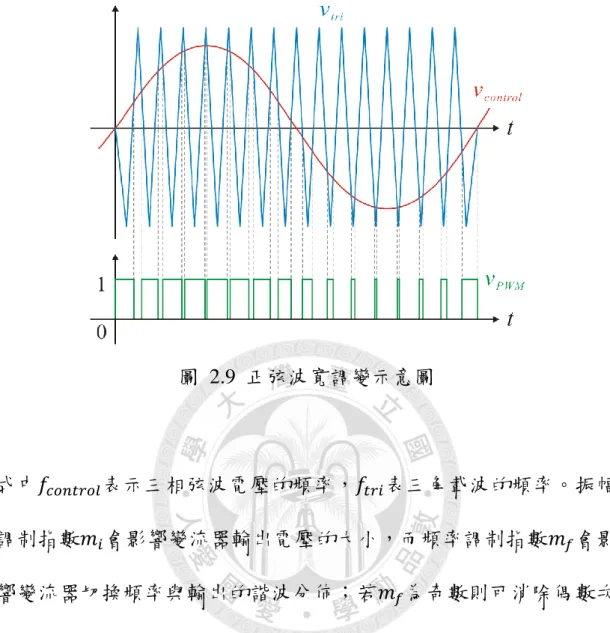
2.5.1 正弦波寬調變策略
正弦波寬調變(sinusoidal pulse width modulation 簡稱 SPWM)策 略是由控制器產生三相的弦波作調製信號 和一三角載波 作比較,利用載波和弦波大小的差異,當 ,則控制器 輸出信號 為高電位;若 ,則控制器輸出信號 為低電位如圖 2.9,藉此產生三相脈寬調變訊號,再經由驅動電路作 開關控制。
根據弦波電壓及三角載波的大小與頻率,可以定義下列兩個指標,
其一為振幅調變指數 ,定義為
(2.33)
式中 表示三相弦波電壓的振幅, 表三角載波的振幅
其二為頻率調制指數 ,定義為
圖 2.9 正弦波寬調變示意圖
式中 表示三相弦波電壓的頻率, 表三角載波的頻率。振幅
調制指數 會影響變流器輸出電壓的大小,而頻率調制指數 會影 響變流器切換頻率與輸出的諧波分佈;若 為奇數則可消除偶數次 諧波, 若為三的倍數更可使變流器上主要諧波成分不會出現在三 相變流器之線電壓上,而 若不為整數則輸出電壓將產生次諧波,
但在 的情況下,此次諧波的現象將可忽略。另外 通常會控 制在 1 以下的線性區操作,因為當 高於 1 時為過調制,將使輸出電 壓之諧波大小增加,從而提高濾波之需求。
2.5.2 變流器切換頻率之分析
由於 決定變流器開關切換頻率,切換頻率越高,諧波越集中
在高頻,也越容易濾除,因此從濾波的觀點來看,三角載波的頻率越 大越好;但開關頻率越高時,其切換損也越大,因此從損失的觀點來 看,三角載波的頻率則越小越好。對大部分應用,切換頻率通常選擇 6kHz 以下或 20kHz 以上。如果系統最佳操作頻率介於 6kHz~20kHz 區間內,通常將其操作頻率提高至 20kHz 以上,避免音頻之噪音。
本論文使用兩組變流器,其中定子側變流器之調制信號為定頻 60Hz 之信號,而轉子側變流器之調制信號則隨轉子轉速變動,介於 0Hz~60Hz 之間。故轉子側變流器調制信號頻率與載波頻率在不同風 速下成不同比例關係,即 不固定,其最小值產生於調制信號頻率 為 60Hz 時,故在希望忽略此諧波的影響且考慮切算損失最小的情形 下,設計載波頻率 。
3
第三章 轉子側變流器分析
3.1 前言
本章討論轉子側變流器的控制,依照 2.4 節所介紹的將 d 軸定位 在定子的磁通空間向量上,以達到發電機實功僅跟解耦合電流 有關,
並考慮最大功率追蹤以及最小銅損的情況,決定轉子電流的直交軸分 量命令值,以控制發電機之運作,使其在固定風速下能有最高的效能。
其中,最大功率追蹤有電流控制模式及轉速控制模式兩種 [14],本 論文採取電流控制模式。在最小銅損上,則考慮定子電阻、忽略鐵損。
3.2 轉子交軸最佳解耦合電流
本論文使用電流模式控制以達到最大功率追蹤,根據方程式(2.10) 風機最大功率曲線和轉子機械轉速三次方成正比,又功率為轉矩和轉 子機械轉速之乘積,故可由式(2.10)推出最佳化的機械轉矩與轉子機 械轉速關係式
(3.1) 若將機械摩擦損失加入考慮,電磁轉矩需將機械轉矩扣除摩擦損失後 求得
(3.2)
(3.3) 其中 B 為摩擦係數再利用(2.30)式解出最佳解耦合電流 。
(3.4)
3.3 轉子直軸電流命令值
承上節,最大功率追蹤下可決定最佳解耦合電流 ,而進一步 考慮發電機銅損 ,以達損失最小化的控制,由 [21]知
(3.5) 然而在實作上,發電機定子端與市電併聯,因此只能透過控制轉 子端的電流來達到發電機的最大功率追蹤與損失之最小化,故將定子 端電流依(2.26)式及(2.27)式轉至轉子側,得
(3.6) 若忽略定子端電阻則 可視為定值,而 已經由最大功率追蹤決定,
也可視為一固定值,由此可知,為達發電機銅損最小化僅需控制轉子 直軸電流。將發電機銅損對變數 微分可得
= (3.7) 在微分為零時可得最小損失,故可得轉子直軸電流命令值
(3.8)
若考慮定子電阻,則 並非定值,則討論較為複雜,可由搜尋 法 [22]或解析法 [23]獲得 參考命令值,本論文採用解析法 [23],
其流程如圖 3.1
圖 3.1 最小銅損之解析法流程圖 步驟一:由穩態等效電路,透過 KVL 可得一組方 程式,將I 、sR IsI以I 、rR IrI表示
步驟二:將P、s P、r Pcu以I 、rR IrI表示
步驟三:為了達到最大功率追蹤,可得到一個I 與rR
I
I 的關係式 r
步 驟 四 : 為 了 達 到 損 失 之 最 小 化 , 必 須 滿 足
,由此可得到另一個IrR與IrI的關係式
步驟五:由步驟三與步驟四的兩個關係式,解聯立 方程式即可得到I 與rR I rI
步驟六:利用座標軸轉換,將I 與rR I 轉為電流控rI 制命令 ,如圖 3.2
q
d
V s
rR
I
I
I
rI r
*
i
dr
*
i
qr
fs s
圖 3.2 實虛軸與 dq 軸轉換示意圖
圖 3.2 中, 為轉子實軸電流和 同相, 為轉子虛軸電流領先實軸 90 度, 為定子磁通和定子電壓之夾角。
3.4 轉子側變流器控制
本節將利用先前最大功率追蹤以及發電機銅損最小化所推導出 的轉子 dq 軸命令電流,建立轉子側變流器的控制方塊圖。在定子磁 通控制下,先就磁通角度做數學模型的建立,並利用前饋補償的方式,
達到解耦合控制。
3.4.1 數學模型建立
在定子磁通導向控制中,其參考角為磁通之角度,而磁通若要直 接量測,則必須改變發電機內部的繞阻較不實用 [19],故利用 2.4.2
節中的估測方式算出磁通於靜止座標軸上的分量,求得磁通角度
其中發電機為 Y-接,利用 2.3.1 節之方法可得電壓電流之靜止軸分量
其中 、 、 為定子三相相電壓峰值, 、 、 為定子三相 線電流峰值。
接著利用同步座標軸轉換定 d 軸於定子磁通空間向量的位置,跟 著轉子電壓電流以 的速度旋轉,便可將轉子端之三相值分別轉換 至 dq 軸上,但特別注意到轉換矩陣之角度 ,見圖 3.3。
和 分別為轉子電氣角速度及電氣空間向量角度。
stationary-axis d-axis
q-axis
e
rear-axis
e
s
ev
r'
re
s
e圖 3.3 轉軸、轉子電流與同步旋轉軸之關係圖
依(2.16)式可得轉換矩陣
其中,轉子電壓或電流將被感應出頻率為 之弦波。
=60Hz 為系統頻率。
為滑差率(slip)
3.4.2 轉子側變流器控制方塊圖
在定子磁通導向控制下,轉子側的電壓與電流關係如(2.29)式所 示,由式中可知電壓電流仍為耦合關係。為使其運算簡化,達解耦合
的控制目的,將(2.29)式中之 dq 軸成分分別令為一組獨立控制參數,
及
將方程式(3.14)及(3.15)代回(2.29),可得轉子電壓命令值如下
此時已得出一解耦合電壓訊號 及 ,且其與電流控制訊號關係可 由 PI 控制器產生
其中 代表微分, 及 為電流控制命令。
+ –
s K
p K
iLr
s R
* 1
i
dr x
dr i
dr
圖 3.4 解耦合後的轉子 d 軸電流控制方塊圖
如此便可得轉子 d、q 軸的電流控制方塊圖如圖 3.4。
得到電壓命令後,即可算出所需調變之振幅調制指數及相對補償 電壓之相角
依此,便可決定三相弦波之控制信號
依照 2.5 節之技術,將其和振幅為 1,頻率為 1260Hz 的三角載波訊 號比較,以比較結果切換變流器,得到實際三相補償電壓。值得注意 的是由於轉子側感應角頻率為 ,故弦波電壓的角度變 化 量 為 , 則 調 制 信 號 角 度 變 化 量 亦 為
。
而為達最大功率追蹤及最小銅損之目的,解耦合轉子電流命令
、 分別依據方程式(3.4)及圖 3.1 而得,如此一來轉子側變流器 之控制方塊圖如圖 3.5。
s Kp Ki
*
i'dr
i'dr
+ -
xdr
+ -
qr r slip σL i'
ω
*
v'dr
s Kp Ki
*
i'qr
i'qr
+ -
x'qr
+ +
i' σL L λ
ω L ds r dr
s m
slip
*
v'qr
* dr
* 1 qr
dc
*2 qr
*2 dr i
v tan v α
v 0.5
v m v
Trangular Signal
Sinusoidal PWM
Vtri a control,
V
b control,
V
c control,
V
*
Tem
ωr Tem* Koptωr2Bωr *
i'qr
最大功率追蹤
*
i'dr
銅損最小化
ds s m
*
* em qr
L λ 1.5p L i T
最小銅損解析法 slip
fs圖 3.5 轉子側變流器控制方塊圖
4
第四章 磁通估測
4.1 前言
如同第三章所提到轉子側的變流器是以定子磁通導向法做控制,
我們將同步旋轉軸的 d 軸定在定子磁通的空間向量上,以達到最大功 率的追蹤,而準確的估測出定子磁通的大小 與相角 將會直接的 影響轉子側變流器的輸出性能。
一 般 而 言 , 磁 通 的 估 算 方 式 可 分 為 電 流 模 型 (Curruent-based Model)磁通估測方式與電壓模型(Voltage-based Model)磁通估測方式 兩種 [3], [4], [5]。電流模型的估測方式必須測量許多發電機的參數,
以解出氣隙磁通,但是這些參數往往會因為運作的情況不同(如轉子 溫度、磁飽和)而有所差異,若為了克服參數變動造成的問題便須架 設線上的量測裝置,如此一來會大大的增加驅動系統的複雜度 [19]。
故本論文中選擇以電壓模型來估算定子磁通。
然而可從 2.4 節中得知,電壓模型的估測方式,主要是由電動勢 (EMF)的純量積分所求得,相較於電流模型需要較多的發電機參數,
此法只需要量測定子電阻即可。但是純量積分器本身就具有直流偏移 量(DC offset)與初值(Initial Value)的問題 [6], [7],為了避免上述純量 積分所造成的問題,在一般的解決方法中,主要是使用一階低通濾波
器來取代純量積分,但是使用低通濾波器又會使得所估測的磁通量產 生大小和相角上的誤差,特別是在發電機操作的頻率低於低通濾波器 截止頻率的情況下,誤差的情形更為的嚴重。
本論文中,為了解決上述的問題,消除低轉速操作時定子磁通估 測大小與相角的誤差,並能操作在較廣的轉速運作區間,運用了 [4]
所提出的濾波器回授補償架構,將有效的改善此問題。
4.2 積分器和一階低通濾波器
在前一節中提到若使用積分器或一階低通濾波器估測定子磁通,
都有著不可避免的問題存在,接著本文就這些問題的產生及影響作進 一步的分析。
4.2.1 初值問題 [7]
假設我們將輸入的電動勢令為一個正弦波信號 , 那麼可以很清楚的得知積分後所得的磁通會是一個餘弦波,但是其後 因積分會產生一個直流偏移的常數項 。可以很明顯的看到,
若是正弦波並非從其波峰或波谷輸入,則所算出的磁通便會多一個實 際上不存在的直流成分。
而使用積分器估測磁通,運用拉普拉斯轉算如同下式
可以看出有一個極點落在原點之上,使得積分器的時間常數被視為無 限大,從而上述因初始狀態而造成的直流偏移量無法衰減而維持著固 定的值。另外,若是輸入的電動勢信號快速的變動,也會造成此類得 直流偏移產生。
4.2.2 直流偏移量輸入 [7]
在實作時,直流成分在電動勢的量測過程中是不可避免的,其造 成的原因大多是因量測定子端電流時使用的類比元件所造成的誤差 或雜訊,而不論產生的直流成分有多小,如上一小節所提,由於積分 器在原點上的極點,使其對直流成分的增益為無限大,從而使用的積 分器會達到飽和,造成量測上的誤差。
4.2.3 一階低通濾波器
為了解決以上所提到的問題,常使用的方法便是以一階低通濾波 器取代純積分器。此處所提及之低通濾波器能有效的將積分過後的直 流成分濾除,但截止頻率的設定會影響濾波的效果並造成不同程度的 相位大小偏差。
此低通濾波器可以視為在一個純積分器後加上一個高通濾波器 組合而成,如圖 4.1 所示,便可有效的將積分器在原點上的極點去除
s
emf 1
s
cs
semf
s
c1
s圖 4.1 一階低通濾波器示意圖
並利用高通濾波器濾掉積分器所估測出來的直流成分誤差。所以若截 止頻率( )高於發電機的電氣頻率,則會因為濾波的效果,使得估算 出來的磁通大小和相位產生顯著的偏差;反之,若設置的截止頻率很 接近零點的話,則其對於直流濾波的效果會較不顯著,故設置的截止 頻率必須適當,才能準確的估算磁通值並消除不必要的直流成分。
4.3 磁通估測之改善法
上節中討論了積分器無法消除直流成分的問題,故往往以一階低 通濾波器取代,而濾波器僅要將截止頻率設置在適當的準位便可有效 的估算磁通,但實際運作時,因低通濾波器的原理,仍會使估測的磁 通大小及相位有微小的誤差,特別是在截止頻率大於電氣頻率時,有 效值衰減、偏差將更為明顯。為改善此問題,消除操作時定子磁通大
小與相角的誤差,本論文中將應用 [4]所提出的演算法,以做改善。
我們可以將一個修正後的積分器輸出視為下式
其中, 為積分器的輸入信號,而 為一個補償的信號。當沒有做任何 補償時 ,此積分器可視為一個一階低通濾波器,而當達到穩 態時,也就是補償信號 等同於輸出信號 時,則此積分器的效果便如 同一個純積分器[ ,如此一來,便可藉由此補償架構解決 低通濾波器造成的相位和大小誤差問題,細節將在下一小節介紹。
4.3.1 演算法一
圖 4.2 為修正過後的磁通估測補償器,根據圖中所示,此種磁通 估測補償器所估算出的磁通量主要是由兩個分量所構成,一個是順向 分量 ,另一個是回授分量 ,而且在回授補償的路徑中加入了飽 和限制器,則我們可將(4.2)式依此設計表示如下
相較於前面所提,此架構中多加入了飽和限制器,主要是為了消除補 償分量之直流成分以限制其不會進入飽和的狀態,磁通限制器的形式 如圖 4.3。
s
c1
c c
s
Lemf
1
s2
s
s
s圖 4.2 演算法一磁通估測補償器
L
s
s
圖 4.3 磁通飽和限制器
如 4.3 節所述,當輸入的電動勢頻率 遠大於截止頻率 時,
其回授分量便微不足道,估測出的磁通主要便由順向分量提供,此時 架構便如同低通濾波器,可改善純量積分的問題。反之,在低頻率運 轉時,回授分量就扮演著消除直流成分避免飽和的重要角色,藉由飽 和限制器的設定(L),效果便如同純積分器。另外,我們考慮有一直 流的輸入,則從(4.3)式中可看出最大的磁通輸出為
也就是說,輸出的準確度取決於飽和限制器的設定值,而為了消除直 流成分,L 必須設定為實際的磁通大小。假如 L 值的設定超過了實際
磁通的小,則在回授分量上便無法限制值流成分的補償,導致估測上 的誤差,而若 L 值的設定小於實際的磁通,則因為限制器的非線性調 制,會造成α-β分量的偏移而使得估測出的磁通角產生誤差,使得 轉子設變流器無法有效的控制。
4.3.2 演算法二
由上面的分析可以知道,雖然演算法一能夠藉由補償的架構有效 的改善一階低通濾波器所造成的大小相位誤差,但是飽和限制器除了 在設定值的決定上有困難外,也會因為非線性造成波形失真,故提出 此進一步的改善方法。
sc
1
c c
s
emf
L
sc
1
emf
Polar To Cartesian
c c
s
Polar To Cartesian
圖 4.4 演算法二:α-β分量補償架構
此估測器是專門設計給交流發電機作磁通估測使用的,由於在三
而個別磁通分量 和 能夠分別從電動勢分量 和 求出,如
上圖 4.4,為了修正α-β分量偏移的影響,便將原先圖 4.3 的架構 改為α-β分量分別作誤差補償,其中磁通大小 通過 磁通飽和限制器以消除直流成分,且因為極座標轉換的緣故不會影響 到磁通角的準確性,如此一來便可避免上述失真的情形發生。
但此種新型磁通估測器的準確性需衡量磁通飽和限制 L 的設計,
對於磁通命令變化的系統,其磁通的飽和限制之大小也需要跟著調整,
所以此種估測方式適合在定磁通操作下的系統來使用。
4.3.3 演算法三
為了配合風力發電機在不同風速下有其不同的最佳轉速,變動的 磁通操作便是一個極需要解決的問題,因為在不同的轉速下,有不同 的磁通命令值,導致磁通飽和限制器必須隨著線上的轉速而有所調整。
所以為了避免設定值的變動問題,利用發電機磁通和電動勢正交的性 質做偵測,以取代原先的磁通飽和限制器,其架構如圖 4.5。
其中正交偵測器(Quadrature detector)將估測出的磁通和電動 勢作內積以檢測兩向量是否垂直,若垂直的話其補償量便為零,反之,
當直流成分或者是低通濾波器造成相位偏差等問題出現時,磁通和電