Volume 24, No.2, 2019, pp. 89-110 DOI:10.6574/JPRS.201906_24(2).0002
1 國立臺灣大學土木工程學系 碩士 收到日期:民國 108 年 03 月 29 日
2 國立臺灣大學土木工程學系 副教授 修改日期:民國 108 年 04 月 22 日
* 通訊作者, 電話:02-23678645, E-mail: [email protected] 接受日期:民國 108 年 05 月 29 日
利用衛星影像以有理函數物像對應解算水位面高程 及水下物點三維坐標
張雅博
1趙鍵哲
2*摘要
現今衛星影像大多利用有理函數模式進行物像對應,但是當衛星攝影取像對象為水下可視場景時,
成像光線會因為折射效應而產生偏移,此時衛星影像帶有的有理函數係數並無法正確描述雙介質的物像 對應關係。為此,本研究提出一調變模式,在有理函數模式下仿擬成像路徑,並考慮折射效應,建構帶有 約制的廣義最小二乘平差模式進行水位面高程及水下物點三維坐標解算。基於幾何本質,受到折射效應 的成像路徑,在水位面為完全未知的情況下,水下折射向量會隨著水位面位置的迭代解算而改變,此時水 位面及水下物點定位具有很大的可接受解算範圍,無法獲得良好的定位成效。因此,本文除揭櫫此物像對 應的特質外,並探討倘若具有額外物空間之觀測值,例如:水位面高程、高程控制點、全控點及水深等,
其如何助益於水位面及水下物點的定位解算。除此之外,聯合多點解算之效益也一併納入考量。實驗資料 部分,則以模擬資料與實際資料驗證所提模式之適用性並完成成果之定性及定量分析。成果上,水位面品 質為此定位模式之關鍵,故須採用可資使用的物空間約制來進行,在絕對條件具有良好品質時,以水位面 約制效果最佳;另一方面,高品質之水深資訊約制解算可獲致水位面定位品質達 1~2 pixels,聯合多點位 水深約制效果又會更佳。除此之外,在高品質水深約制模式下,水下物點高程分量品質更勝於水位面完全 已知時之解算成效。
關鍵詞:有理函數模式、折射效應、水下物點、水位面高程、約制
1. 前言
隨著科技快速發展,空間位置資訊取得愈加方 便。在實務上,除了單一介質環境的測量工作之外,
也會碰觸到非單一介質場域的測量任務,其中最常 見的莫過於收集水下空間資訊。水下環境的測繪方 式多元,例如:聲納、探測光達、雷達影像及光學 影像,甚至是自主式水下載具。各項方法具有其自 身操作條件及限制,其中以空氣往水中拍攝的光學 影像,在水下目標清晰可視的情況下,可以藉由光 譜分析或是幾何解算法測取水下空間資訊,是淺海 地區水下場景及島礁測繪(如圖 1)方便執行的圖資 來源。
除此之外,透過衛載或空載之光學攝像有其便 利作業之處,在水質清晰的條件下,可使用該影像 進行水深達 10 到 15 m 範圍內水下場景重建任務 (Lee et al., 1995)。且相較於一般航空攝影,衛星影 像攝取較不受到地域及飛航管制之影響,當排除雲 層遮蔽的情況下,可以短時間內取得同一地區之影 像,且感測器運行軌道具有一定路徑及航高,倘又 搭配觀測視角的可調整功能,更能簡化拍攝準備過 程,單幅影像的涵蓋範圍也較廣。但相對上,影像 解析度不及航拍影像。
圖 1 東沙環礁福衛二號衛星影像 (國家實驗研究 院國家太空中心,2011)
針對折射效應修正,處理方式分為兩類(邱庭 萱,2016),一種為基於折射效應對光線的成像路 徑進行修正(圖 2 左),例如:Okamoto and Höhle (1972)解析在相機內外方位參數、介面及介質係數 已知的情況下,如何以多邊形模式進行共軛光線 的前方交會;Kotowski (1988)提出同時包含多種介 面係數的光束法,以重建多介質的光線成像路徑 的方式來進行前方交會;Glassner(1989)以光線追 蹤法建立光線穿過不同介質交界面時其入射向量 與折射向量之關係式;Maas(1995)提出簡化的多介 質攝影幾何模式,將折射理論引入,探討行經水、
玻 璃 及 空 氣 的 成 像 路 徑 ; Li et al.(1997) 及 Mulsow(2010)亦以光線追蹤法,依序進行方位解算 及物點前方交會定位。
另一類則為基於補償概念,只對於單介質假 設下的前方交會結果進行高程分量上的修正(圖 2
右),例如:Murase et al.(2008) 針對航拍之水下場 景影像,忽略折射效應對於前方交會物點水平分 量影響,只針對高程分量進行折射修正;劉建良 等(2016)及洪欣宇(2017)以衛星光學影像進行水下 地形的重建任務中,亦只針對高程進行折射修正。
上述提到之相關文獻皆是在水位面為完全已知(亦 即無誤差)的前提下進行,然而在實務上,目標場 域之水位面位置不一定為已知,為放寬此一解算 之環境條件,已有研究工作運用框幅式影像,在 水位面為完全未知的前提下,透過結合折射修正 的光線追蹤法,同時解算水下物點及水位面高程 參數,並進行影響因子探討及引入部分物空間約 制的解算成果精度分析(邱庭萱,2016、Lee and Jaw, 2017、Lee and Jaw, 2018),但尚未有以高解析度衛 星光學影像在水位面完全未知或帶有約制的情況 下,進行定位之相關研究。
因此,本研究課題著重在使用高解析度(指地 面取樣距離小於或等於 5 m 者)的衛星光學影像,
在由空氣往水中攝影的可視範圍環境,假設水位 面為一水平面且水位面為未知或帶有約制的情況 下,以衛星影像常用的物像對應模式—有理函數 模式(Rational Function Model, RFM),考慮折射效 應後同時解算水位面高程及水下物點坐標,並探 討在觀測量具有誤差或參數具有先驗資訊下,如 水位面、水下控制點及水深先驗資訊等,對於水 位面及水下物點坐標解算品質上的定性定量影響。
水位面一詞在本研究中所指為水位面高程。
圖 2 光學影像幾何法對於折射修正之不同方式
2. 研究方法
如前述,以往使用幾何模式進行水下前方交會 的相關研究,對於折射效應修正大多採用基於補償 概念,忽略水下物點水平方向定位,只針對水下物 點之高程方向進行折射修正。然而,折射效應對於 水下物點之水平方向定位誤差與其所處水深及雙 像之入射角有關,可藉由折射幾何推得水平及高程 分量修正量,如圖 3 所示。其中,高程修正量受水 折 射 係 數 (1.33) 及 入 射 角 度 影 響 , 其 值 約 介 於 1/4~1/3 水深範圍。
在雙介質(空氣/水)環境且未考慮折射修正下,
當雙像入射角不相近且交會角度較大時,如左右像 入射角分別為 40 度與 65 度,水深 10 m 時,在水 平分量上會產生近 1 m 的誤差;高程分量則會產生 約 2.5~3.3 m 的誤差。故為能有效且正確地進行水 下物點定位,本研究基於折射效應進行定位演算,
以完整光線路徑進行交會,改善定位成果。
2.1 自空氣往水中攝影之有理 函數模式
本研究參考黃聖日及趙鍵哲(2014)基於共線式 及折射定律,假設水位面為一靜止之水平面,藉由 光線追蹤描述光線於空氣中及水中行進路線,推演 出基於有理函數模式下的雙介質攝影測量物像對 應模式。然而,有理函數係數與軌道參數不同,無 法直接得知攝影瞬間透視中心位置及光軸姿態而 以共線條件表達光線行徑,對於描述空氣中的成像 路徑必須採取變通之方式。因此,本研究提出了一 調變方式來解決此項問題,並考慮到折射效應建構 基於有理函數模式之自空氣往水中攝影之物像對 應模式。
2.1.1 逆有理函數係數
一般的有理函數,其型態為像點二維坐標是物 點三維坐標之函數。為勾勒出光線於空氣中的路徑,
物像對應資料處理順序主要藉由量測的像點坐標 來得到其所對應在物空間的位置,可藉由逆有理函 數(Reverse Rational Function),參見式(1),並搭配已 知的逆有理函數係數,給定像點坐標及物點高程分 量,可決定相應物點的水平分量坐標。
圖 3 雙像入射角及水深對於水下物點定位之影響
圖 4 成像路徑追蹤示意圖(有理函數模式)
本研究之逆有理函數係數求解其具體作法為 利用衛星公司提供的有理函數係數,在量測區域中 布設以初始水位面為基準,與其距離約-10 至 500 m 之作業區範圍內的虛擬控制點(包括檢核點)格網,
並以微小常數法(Tao and Hu, 2001)求出逆有理函數 係數(Nagasubramanian et al., 2008、Yang, 2000),如 式(1),其迭代停止條件為檢核點像點誤差小於 0.1 pixels。此外,因此組係數主要目的是協助描述空氣 中的成像路徑,故無法沿用衛星公司所提供之有理 函數係數所處大地坐標系(經緯度),必須將其全轉 換到 UTM 坐標系統下。
⎩
⎨
⎧ = ( , , )( , , )=∑∑ ∑∑ ∑∑
= ( , , )
( , , )=∑ ∑ ∑
∑ ∑ ∑
... (1)
其中,r、c 為標準化(Normalized,或稱正規 化)的影像坐標,( , , )為標準化的物空間坐標 (UTM 投影坐標系)。 、 、 、 為多項 式係數。 1~ 3 及 1~ 3為項數個數。
2.2 結合折射效應之有理函數 模式
由式(1),給定兩高程值,分別為高於初始水位 面之高程值(Zs)及初始水位面(d),可以得到成像路 徑空氣介質中的一點及穿刺點坐標。得到對應的物 點坐標作為路徑上的一點及穿刺點坐標,如式(2)及 式(3)。
= , ,
, ,
= , ,
, ,
... (2)
= , ,
, ,
= , ,
, ,
... (3)
其中, ( , , ):像點( , )在高程 時所 對應之物點三維坐標,為路徑上空氣介質中的一
點; ( , , ):像點( , )在水位面( = )時 所對應之物點三維坐標,即穿刺點;右下標 n,代 表經標準化處理。
將穿過成像路徑空氣介質中的一點與穿刺點 之三維直線設想為光線於空氣中成像路徑( ⃑),由 此三維直線方程式仿擬透視投影由透視中心穿過 像點之向量,據此產生對應於帶有穿刺點坐標之 方程式並連結至前述所提及之光線追蹤模式,並 藉由成像光線在介面因折射效應旋轉,而得到水 中的成像路徑方向,即可推演出平面介面假設之 基於有理函數模式由空氣至水中雙介質攝影測量 物像對應模式,如圖 4 及式(4)所示。
− = ( − )∆
− = ( − )∇ ... (4)
其中,
∆= ( )
( );
∇= ;
= ;
= (1 − ) + ;
= (1 − ) − ;
= (1 − ) + ;
= (1 − ) + ;
= (1 − ) + ;
= (1 − ) − ;
= (1 − ) − ;
= (1 − ) + ;
= (1 − ) + ; ( , , ) = normalized ⃑ × − ⃑ ;
⃑ = 0 0 1
, ⃑ =
−
− Z − Z
;
= ( ∗
) ;
= ⃑⃑∙ ⃑⃑ ; = − ;
式中符號,× 代表向量外積;∙ 代表向量內積;
∗ 代表相乘; ⃑:入射向量; ⃑:水位面之法向量;
、 分別為空氣及水介質係數;( , , ):
空氣路徑中一點之三維坐標;( , , ):水位面 的穿刺點物空間三維坐標;(X, Y, Z):水下物點之 三維坐標;d:水位面高程參數。
2.3 帶有約制的廣義最小二乘 平差模式
在自空氣往水中攝影之有理函數模式中,存 有許多不同型態且具有隨機性質的資料,為考慮 各變數隨機誤差大小對於整體平差模式的影響,
將式(4)中除了像點觀測量之外其它具有先驗資訊 的未知參數作為額外觀測條件,亦即將其視為觀 測量,例如:水位面觀測量、水下控制點及水深 等,作為本研究解算上的額外約制條件並採用帶 有約制的廣義最小二乘平差模式,如式(5)所示,
進行參數解算及誤差評估。
+ = , ~(0, ∑1= 02 −1)
+ = , ~(0, ∑2= 02 −1) ... (5)
寫成矩陣形式為:
0
0 + = ... (6)
令 = 0
0 ; = ; = ;
= ;∑ = ∑ 0
0 ∑ ; = 0
0 式(6)可簡化為式(7):
+ = , ~(0, ∑ = ) ... (7)
最小二乘解之參數向量、改正數向量、後驗單位 權 方 差 及 後 驗 參 數 方 差 協 方 差 矩 陣 分 別 為 式 (8)~(11)。
= [ ( ) ] [ ( ) ] ... (8)
= = −
− .. (9)
= ... (10)
∑ = [ ( ) ] = ... (11)
其中,
B:式(4)對觀測量偏微分係數矩陣;
A:式(4)對未知參數偏微分係數矩陣;
:約制條件之係數矩陣;
:未知參數向量,包含水下物點三維坐標及 水位面高程參數;
、
:誤差向量;、 :分別為式(4)約化後的像點觀測量及 約制條件觀測量向量; :先驗單位權標準差;
、 :分別為觀測量及約制條件之權矩陣; : 未知參數增量向量; :後驗單位權標準差; : 改正數向量,包含像點觀測量改正數向量( )及約 制條件改正數向量( );∑ :後驗未知參數最或是 值方差-協方差矩陣; :多餘觀測數。
2.4 解算系統分析
根據本研究所提出之模式,可分析此系統下 採立體像對的未知參數(水下物點三維坐標及水位 面高程參數)、觀測量個數(雙像量測像點)、多餘 觀測數及最小求解條件,如表 1 所示。於單一水位 面時,使用單點即可滿足最小求解條件;雙水位 面(常出現於具時間差異之異軌像對)時則需使用雙 點,才得以滿足最小求解條件。
2.5 品質評估
針對後續成果分析,本研究使用兩項指標作 為 品 質 評 估 依 據 。 一 為 理 論 精 度 (Theoretical Precision),根據原始觀測資料先驗資訊所推估之 測量品質,在此以平差模式中參數之方差-協方差
矩陣(法方程式逆矩陣)中,對角元素開根號後乘以 單位權標準差,獲致參數標準差。另一項則為實 際精度(Empirical Accuracy),在此選用均方根誤差 (Root Mean Square Error, RMSE)來表示,在模擬實 驗乃藉由重複加入 100 次隨機誤差所得之未知參數 最或是值與真值之差值均方根作為後續實驗實際 精度上之分析。
在品質指標選用上,“Precision”反映純由平差 計算獲得之精密度,而“Accuracy”則為估值與真值 (或參考值)之差異衍生之精準度。當檢核資料可視 為真值時,精度評估指標選用均方根誤差來表示;
若考量檢核參考值本身亦具備觀測誤差,實際精 度則以“差值(Difference)”表估值與檢核資料之差異 量。
表 1 衛星影像立體像對解算系統分析
衛星影像 同軌 異軌
水位面型態 單一水位面 雙水位面
觀測量個數 4p 4p
未知參數個數 3p+1 3p+2
約制條件個數 q q
多餘觀測數 p+q-1 p+q-2 最小求解條件 p ≥ 1, as q=0 p ≥ 2, as q=0
註:p 為待求點位個數
3. 實驗成果與分析
本研究除探討自空氣往水中物像對應有理函 數模式,對於水位面及水下物點定位之有效性及 正確性外,亦針對不同物空間約制,進行水位面 及水下物點定位品質評估。實驗安排,第一部分 以模擬資料進行定性定量分析;第二部分則以實 際衛星立體像對之水位面及水下物點定位結果進 行成果分析驗證。
3.1 模擬資料建置
本研究參考周君芸(2009)論文之衛星影像資料,
選取兩張 SPOT-5 衛星影像立體像對建置本實驗之 模擬資料,詳細資料及基本假設如表 2 所示。藉由 衛星影像軌道參數,界定出其在物空間的成像範
圍,並在 X 分量上自 160000 m 到 197500 m 之間 每 2500 m 模擬一點;在 Y 分量上自 2560000 m 到 2577500 m 之間每 2500 m 模擬一點;在 Z 分量上 以-1、-5、-10 m 為分界模擬一點,總共設計 384 個 點位作為測試資料,點位分布如圖 5 所示。
表 2 實驗配置一覽表
項目 內容
使用影像 SPOT-5 立體像對
基高比 0.6
左像/右像入射角(degree) 17/19 交會角度(degree) 33
地面取樣距離(m) 5
水位面 高程為 0 m 之水平面
水介質係數 1.33
水質 均質
圖 5 模擬資料示意圖(紅圈為逆有理函數係數對應 誤差最小的 9 個點位,但礙於文章限制,在此 只使用黃框內之紅點進行後續討論)
逆有理函數係數求算部分,則在實驗區內布 設 7380 個虛擬控制點與 702 個虛擬檢核點,以微 小常數法進行迭代運算求出影像相對應之逆有理 函數係數。且基於逆有理函數係數仍具有些微誤 差及文章版面限制,故選定本實驗中三個逆有理 函數係數對應誤差最小且處於不同水深之點位(點 24、152、280)作為後續分析之代表。
3.2 自空氣往水中攝影之有理 函數模式之可行性
當所有觀測量皆無誤差且水下物點及水位面 參數皆為完全未知的情況下,藉由本研究自空氣 往水下攝影之有理函數模式,考慮折射效應後同 時解算水位面及水下物點三維坐標,與未考量折 射修正之結果相比,其可有效改善水下三維坐標 水平及高程方向的定位結果,尤其是在水深較為 深處的點位,如表 3 所示。
3.3 幾何特性分析
在本研究課題下,當水位面完全未知時,其 解算系統本身為一條件數高的弱幾何,當無法提 供高精度像點量測品質時,參數解算呈現偌大誤 差,常使成果不具可用性,數據例可參表 4 相關內 容。故本章節旨在探討本模式在幾何上的特性及 其相關之影響因子。
3.3.1 條件數
對於參數解算,條件數(Condition Number)可 衡量矩陣求逆時的敏感性及穩定性。代數意義上,
條件數為最大與最小特徵根之比值,代表解算系 統良劣之差距;條件數愈大時,解算系統愈易受 到擾動,此時若觀測量品質不佳,則易獲致不良 的參數解。除此之外,針對具高條件數的非線性 系統,也需搭配良好的參數近似值,才能獲致合 理之參數收斂解。
在解算系統上,則大致可以分為無解、無限 多解及唯一解。當解算上為無解(例如:兩直線平 行求交點)或是無限多組解(例如:兩直線完全重合 求交點),此時為奇異解,也就是一般所認為幾何 條件不足的情況(秩虧),理論上,其條件數為無窮 大數值(Infinite Number)。
在本研究配置中,以法方程式逆矩陣之條件 數作為評斷指標,採 MATLAB R2016a 內建的條件 數函數,使用矩陣與其逆矩陣 2-範數(2-norm)乘積 來表示其條件數。如表 4 所示,當水位面為完全未 知的情況下,其條件數約為水位面完全已知(即水 位面參數無誤差)時的10 倍,換句話說,當水位面 為完全未知時,其參數解算誤差受到觀測量誤差 所產生的影響約是水位面完全已知時的10 倍。水 位面已知時解算系統若屬良置(Well-conditioned)系 統,水位面完全未知時之系統則為高條件數的弱 交會系統,亦接近於病態(Ill-conditioned)系統。
因此,在水位面為完全未知的情況下,考量 水下影像像點量測誤差,解算成果並不符合大部 分工程應用需求,故在實務上應結合可資使用之 物空間約制,同時解算水位面及水下物點。
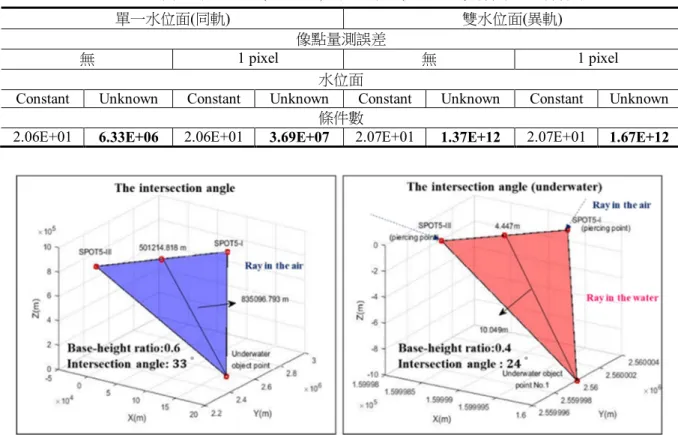
3.3.2 弱化的交會幾何
在交會幾何上,因為受到折射效應的影響,
使原本兩成像路徑與基線所形成的核面(僅考慮空 氣介質時)轉變為穿刺點與物點所形成的三角形(考 慮空氣/水折射效應),如圖 6 所示。減弱的基高比 與交會角度(由 33 度變為 24 度),劣化了交會幾何,
降低交會解算之坐標品質。
3.4 地面取樣距離 vs.穿刺點的 位移
相較於一般的近距離攝影測量,衛星影像屬 於長物距之攝影。一般來說,衛星影像所對應之 地面取樣距離(GSD)較近距離拍攝之影像者大。當 兩者在相同像點量測誤差下,長物距攝影測量在 穿刺點的描述上產生較大的位移,如圖 7,進而影 響到交會解算的品質。
表 3 (考慮折射 vs 不考慮折射)前方交會結果差值
編號 水深(m) 未考慮折射之定位誤差(m) (在水位面已知條件下)
本研究提出之雙介質有理函數模式 定位誤差(m)(水位面為未知數) Depth ∆X ∆Y ∆Z ∆X ∆Y ∆Z ∆d (m) 280 1 0.002 0.001 0.266 0.000 0.000 0.003 0.008 152 5 0.002 0.003 1.328 0.000 0.000 0.003 0.008 24 10 0.003 0.007 2.656 0.000 0.000 0.003 0.007
表 4 水位面完全已知(Constant)與完全未知(Unknown)解算系統之條件數
單一水位面(同軌) 雙水位面(異軌)
像點量測誤差
無 1 pixel 無 1 pixel
水位面
Constant Unknown Constant Unknown Constant Unknown Constant Unknown 條件數
2.06E+01 6.33E+06 2.06E+01 3.69E+07 2.07E+01 1.37E+12 2.07E+01 1.67E+12
圖 6 因折射效應而使交會角度變小之示意圖
圖 7 穿刺點位移量(近物距/長物距)
3.5 影響因子探討
在可解性分析上,本模式中之水位面為一未 知參數隨著每次迭代調整。從幾何條件上,有兩 類秩虧幾何應予避免,第一類為當雙像的入射角 相同時(圖 8 左),水位面會產生無限多組解;另外,
當物點位於兩衛星攝像中心基線鉛錘面,此時,
物點的雙像偏折面(通過入射線與介面法線的平面) 共平面(圖 8 右),也會發生水位面解算秩虧幾何。
此外,在水位面解算品質上,入射角與水位面解 算品質之關係可由圖 9 來表示,圖中公式為假設水 下物點具有 1 m 之高程定位誤差時,其所對應的水 位面誤差,當入射角愈小時,水位面誤差愈大,
換句話說,在入射角較小的影像中,其所對應的 水位面解算品質較差。
3.6 不同約制之解算品質影響
如同 3.3 節所述,自空氣往水中攝影之有理函 數模式於水位面完全未知的情形下,屬於高度弱 幾何解算系統,解算系統受誤差影響甚劇,如表 5 所示。在像點量測誤差為 1 pixel 時,解算成果之 水下物點水平分量誤差小於 2 pixels,然而,高程 分量誤差卻大至數百 pixels,而水位面高程誤差更 甚於物點高程誤差。此外,由平差系統得到的相 關係數,如表 7 所示,指出水位面與水下物點之高 程具有高度相關,因此,倘能提升水位面之定位 品質,連帶地可提升水下物點之高程定位品質;
反之亦然。
圖 8 雙像相同入射角(左) / 偏折面共面(右)示意圖
圖 9 入射角與水位面調整量關係圖
因此,在後續解算上,嘗試藉由可資使用的先 驗資訊,包括絕對條件的水位面、物點平面控制
點(平控點)、高程控制點(高控點)與全控點以及相 對條件的水深資料等提供約制,助益於提升定位 成效。由於不同高解析度衛星光學立體像對所對 應之地面取樣距離並不相同,故後續研究分析上,
坐標單位均化至影像並採用 pixel,以方便後續不 同解析度之衛星立體像對,進行定位成果比較。
以下細部章節則針對各種不同情況,基於本 研究假設之攝影配置下,以水位面高程參數為完 全未知下之最小求解條件觀測數進行定性定量分 析。其中各章節之基本假設為具有 1 pixel 像點量 測誤差,各類先驗資訊具有 20、10、5、2、1、0.2、
0 pixels 隨機誤差對於水下物點及水位面之定位成 果。除此之外,也藉由給予不同先驗資訊品質約 制所得到之水位面及水下物點三維之理論精度,
與先驗資訊完全已知及完全未知時成果相比後(以 差值小於 0.1 pixels 作為區分標準),進行各約制之 品質分析,即了解不同的先驗資訊品質於平差系 統中所扮演的角色。水位面可包含單一水位面及 雙水位面情況,本文礙於版面限制,後續資料處 理,除了平控點約制情形以外,其它都以異軌立 體像對具雙水位面為分析對象。
表 5 水位面完全未知且像點具 1 pixel 量測誤差之定位理論精度
No.
水位面完全未知且像點具有 1 pixel 量測誤差 理論精度 (±pixel)
24 0.862 1.760 588.196 1625.954
152 0.862 1.760 588.245 1626.085
280 0.862 1.760 588.269 1626.155
表 6 同時解算水位面及水下物點三維坐標(水位面約制)—雙水位面 水位面
隨機誤差 (±pixel)
水下物點三維坐標定位精度(±pixel) 水位面定位精度(±pixel)
條件數
/ / / / /
20 0.815/0.816 0.856/1.042 6.527/6.001 17.324/17.499 16.475/17.356 9.58E+02 10 0.739/0.807 0.728/0.846 4.732/4.040 9.166/9.530 10.720/9.505 2.42E+02 5 0.721/0.803 0.757/0.739 3.343/3.374 4.708/4.933 4.636/4.929 6.32E+01 2 0.712/0.801 0.724/0.699 2.672/3.165 2.048/1.996 2.120/1.995 2.25E+01 1 0.754/0.801 0.692/0.692 2.869/3.131 0.882/0.999 0.976/0.999 2.12E+01 0.2 0.798/0.801 0.630/0.690 2.714/3.121 0.206/0.200 0.195/0.200 2.46E+02 已知 0.768/0.801 0.664/0.690 2.901/3.120 0.000/0.000 0.000/0.000 2.07E+01
圖 10 水位面參數約制效果(1)
圖 11 水位面參數約制效果(2)
表 7 水位面參數(d)對水下物點三維坐標之相關係數 項目
相關係數 -0.3709 0.0321 0.9270
3.6.1 水位面約制
由表 6,即使在 20 pixels 的水位面先驗資訊約 制下,水下物點的水平分量仍可達約 0.9 pixels 的 定位精度。當水位面先驗資訊精度愈高時,可以 有效地提升水位面及水下物點坐標的定位成果,
尤其在水位面及水下物點的高程分量上。同時,
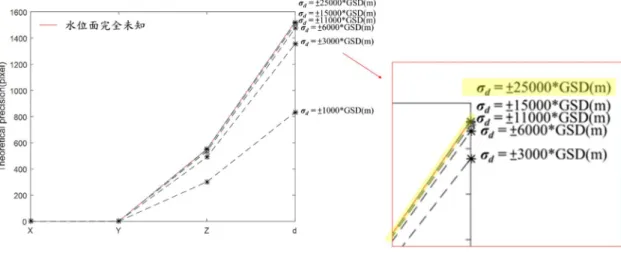
相較於水位面完全未知之解算系統,在水位面約 制的解算系統下,其條件數大幅下降,相當接近 於當水位面完全已知者。再者,當逐漸降低水位 面先驗品質,由圖 10 及圖 11 可得知,當水位面的 先驗資訊誤差大於 25000 pixels 時,可將其視為完
全未知;當水位面的先驗資訊誤差介於 2~25000 pixels 時,可將其視為觀測值;當水位面的先驗資 訊精度優於 2 pixels (在此為 10 m)時,則可以得到 與水位面是完全已知時相同的三維定位精度。換 句話說,此時水位面約制效果相當於是扮演一個 無誤差資訊的角色。
3.6.2 平控點約制
水位面與水下物點之水平分量本身相關性較 低,無法有效提升水位面定位品質,進而帶動提 升水下物點之高程分量定位品質。因此,平控點 約制對於提升整體解算品質之效益不大,即使平 控點為完全已知的情況下,在水下物點高程及水 位面的定位上,仍有數百 pixels 之誤差,參見表 8。
平控點作為約制的效益並不佳,可不予以納入約 制考量。
3.6.3 高控點約制
表 9 顯示在水下物點之水平分量定位上,具有 0.6~1.2 pixels 的精度。當高程控制點先驗資訊精度 提升時,可以增加水位面及水下物點坐標的定位 品質,在水位面部分可以達到 10 pixels 的定位精度。
由圖 12 及圖 13,當高控點先驗資訊誤差大於 11000 pixels 時,可將其視為完全未知;當高控點 先驗資訊誤差介於 0.2~11000 pixels 時,可將其視 為觀測值;當高控點先驗資訊精度優於 0.2 pixels (在此為 1 m)以內時,可以得到與水下物點高程已 知時相同的三維定位精度,其作用相當於無誤差 之高程點。
3.6.4 全控點約制
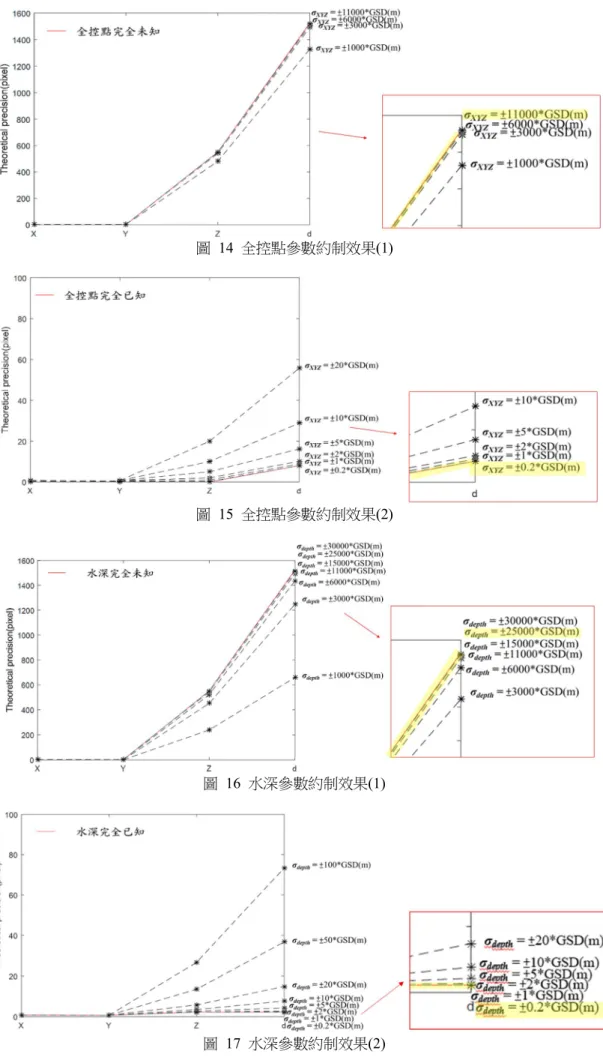
由表 10,可以看到全控點約制成效略優於高 控點約制成效(表 9),當全控點先驗資訊精度愈高 時,可以提升水位面及水下物點坐標的定位成果,
水位面可以達到近 10 pixels 的定位精度。在平差中 角色扮演上,參見圖 14 及圖 15 所顯示者,當全控 點先驗資訊誤差大於 11000 pixels 時,可將其視為 完全未知;當全控點先驗資訊誤差介於 0.2~11000 pixels 時,可將其視為觀測值;當全控點先驗資訊 精度優於 0.2 pixels (在此為 1 m)時,可以得到相當 於與水下物點高程已知時相同的三維定位精度,
也就是相當於此時模式中的未知參數僅有水位面 參數。水位面參數與水下物點水平坐標相關性較 低,因此在解算水位面參數品質上,全控點與高 控點約制能力約略相等。
圖 12 高程控制點參數約制效果(1)
圖 13 高程控制點參數約制效果(2)
表 8 同時解算水位面及水下物點三維坐標(平控點約制)—單一水位面 平控點
隨機誤差 (±pixel)
水下物點三維坐標定位精度(±pixel) 水位面定位精度
(±pixel) 條件數
/ / / /
20 0.785/0.861 0.672/1.753 20.679/586.157 56.302/1620.322 6.25E+06 10 0.836/0.858 0.720/1.733 21.477/580.328 59.745/1604.200 6.15E+06 5 0.810/0.844 0.692/1.658 20.655/558.980 55.829/1545.167 5.79E+06 2 0.743/0.774 0.730/1.314 22.001/463.714 60.543/1281.709 4.37E+06 1 0.617/0.635 0.534/0.864 20.221/348.891 56.121/964.139 3.26E+06 0.2 0.214/0.194 0.206/0.199 21.623/235.424 58.808/650.277 1.30E+07 已知 0.000/0.000 0.000/0.000 20.661/225.453 56.622/621.195 5.90E+04
表 9 同時解算水位面及水下物點三維坐標(高控點約制)—雙水位面 高控
隨機誤差 (±pixel)
水下物點三維坐標定位精度(±pixel) 水位面定位精度 (±pixel)
條件數
/ / / / /
20 0.839/0.832 1.151/1.321 13.765/14.309 41.534/43.156 37.197/41.319 7.46E+03 10 0.801/0.830 1.154/1.321 8.989/7.378 29.736/26.175 26.426/24.280 1.98E+03 5 0.799/0.826 0.860/1.321 5.014/4.000 16.830/19.769 17.593/17.609 9.40E+02 2 0.830/0.815 0.834/1.321 2.036/1.849 12.543/17.561 10.009/15.226 9.28E+02 1 0.795/0.810 0.806/1.321 0.994/0.976 10.978/17.222 8.877/14.854 9.27E+02 0.2 0.811/0.808 0.820/1.321 0.193/0.200 11.825/17.113 9.016/14.733 1.10E+04 已知 0.801/0.808 0.788/1.321 0.000/0.000 10.534/17.108 8.354/14.728 9.27E+02
表 10 同時解算水位面及水下物點三維坐標(全控點約制)—雙水位面 全控
隨機誤差 (±pixel)
水下物點三維坐標定位精度(±pixel) 水位面定位精度(±pixel)
條件數
/ / / / /
20 0.831/0.831 1.269/1.316 12.835/14.309 38.412/43.137 38.037/41.304 7.47E+03 10 0.780/0.827 1.082/1.303 9.113/7.378 29.072/26.053 25.269/24.181 1.99E+03 5 0.760/0.812 0.917/1.254 4.183/3.999 16.018/19.168 13.792/17.103 8.72E+02 2 0.752/0.746 0.784/1.031 2.107/1.847 10.319/14.690 10.541/12.742 6.55E+02 1 0.637/0.620 0.621/0.729 0.981/0.975 10.906/11.647 8.509/10.006 4.97E+02 0.2 0.197/0.194 0.207/0.195 0.197/0.200 8.933/8.957 7.141/7.654 2.18E+03 已知 0.000/0.000 0.000/0.000 0.000/0.000 8.605/8.778 7.357/7.500 1.37E+00
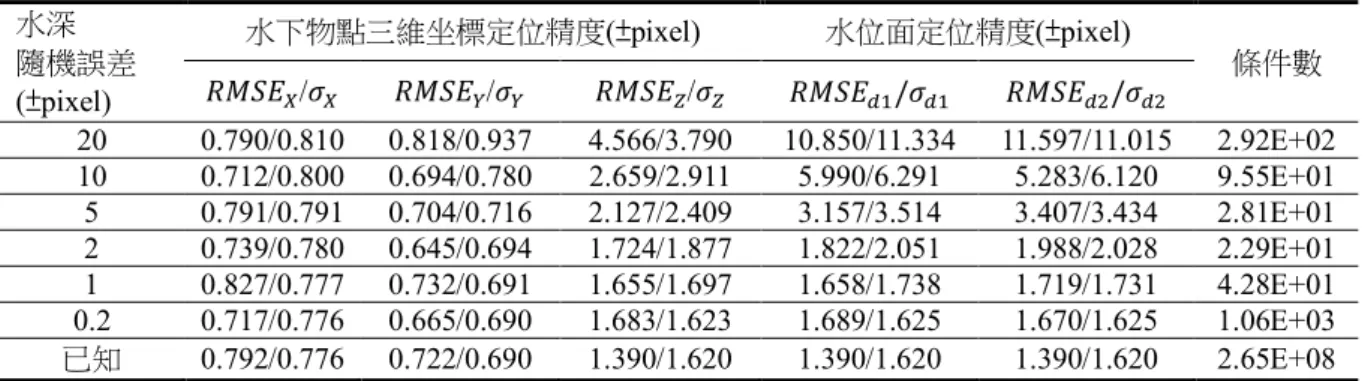
3.6.5 水深約制
由表 11,在水下物點之水平分量定位上,大 約具 0.6~0.8 pixels 的精度。當水深部分已知資訊精 度愈高時,例如誤差小於 2 pixels,雖可提升水位 面及水下物點坐標的定位成果,但增益效果有限;
當水深資訊精度達 0.2 pixels 時,約制效果已等同
於無誤差之約制。此外,以圖 16 及圖 17 可以得知,
當水深先驗資訊誤差大於 25000 pixels 時,可將其 視 為 完 全 未 知 ; 當 水 深 先 驗 資 訊 誤 差 介 於 0.2~25000 pixels 時,可將其視為觀測值;當水深 先驗資訊精度優於 0.2pixels (在此為 1 m)時,可以 得到相當於無誤差水深的三維定位精度。
圖 14 全控點參數約制效果(1)
圖 15 全控點參數約制效果(2)
圖 16 水深參數約制效果(1)
圖 17 水深參數約制效果(2)
表 11 同時解算水位面及水下物點三維坐標(水深約制) —雙水位面 水深
隨機誤差 (±pixel)
水下物點三維坐標定位精度(±pixel) 水位面定位精度(±pixel)
條件數
/ / / / /
20 0.790/0.810 0.818/0.937 4.566/3.790 10.850/11.334 11.597/11.015 2.92E+02 10 0.712/0.800 0.694/0.780 2.659/2.911 5.990/6.291 5.283/6.120 9.55E+01 5 0.791/0.791 0.704/0.716 2.127/2.409 3.157/3.514 3.407/3.434 2.81E+01 2 0.739/0.780 0.645/0.694 1.724/1.877 1.822/2.051 1.988/2.028 2.29E+01 1 0.827/0.777 0.732/0.691 1.655/1.697 1.658/1.738 1.719/1.731 4.28E+01 0.2 0.717/0.776 0.665/0.690 1.683/1.623 1.689/1.625 1.670/1.625 1.06E+03 已知 0.792/0.776 0.722/0.690 1.390/1.620 1.390/1.620 1.390/1.620 2.65E+08
3.6.6 綜合討論
綜合前述實驗,在物空間約制上,共採用五 種不同的物空間約制,且可將其可以分為兩類,
如表 12 所示。
表 12 物空間約制分類表
類別 絕對條件 相對條件
內容
相當於直接對水 位面及水下物點 相應分量進行觀 測。
藉 由 水 位 面 高 程 及 水 下 物 點 高 程 之 差 異 量 作 為 約 制 條 件。
項目
水 位 面 、 平 控 點、高控點及全 控點
水深
水位面品質實為此定位模式之關鍵,在絕對 條件及相同誤差授予下,對於提升水位面高程估 值品質,約制效果依序排列為水位面、全控點及 高控點,而平控點效果不彰。當水位面約制條件 品質尚未達完全已知時,水位面定位品質是較水 下物點高程分量為差的。相對而言,水深約制雖 屬於相對概念,但其效力含括水位面及水下物點 高程參數,在先驗精度品質良好情況下,例如 2 pixels,水位面高程及水下物點高程不僅獲得良好 定位成效,也展現兩者間較為相近的定位品質。
除此之外,在此高品質水深約制下,水下物點高 程分量品質甚至優於同誤差品質下水位面約制的 成效。整體而言,高控點及全控點約制對水位面 品質助益不及水位面及水深約制;在物空間約制 隨機誤差較小的情況下(小於 2 pixels),水位面定位 成效以水位面約制條件效果較佳,但在水下物點
高程定位成效,水深約制優於水位面約制;而在 物空間的約制隨機誤差較大的情況下(達 20 pixels),
水深約制對水位面及水下物點高程定位成效則優 於水位面約制。
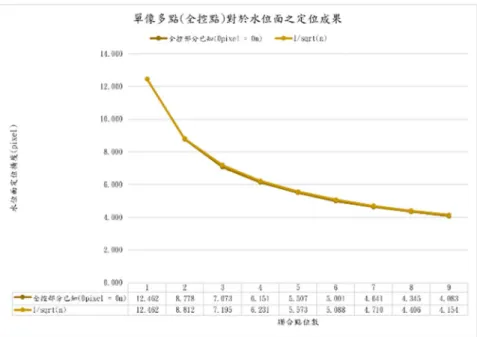
3.7 聯合多點解算效益分析
假若約制條件為全控點,則幾何條件上是可 利用單像來解算水位面高程參數。本節假設像點 具有 1pixel 量測誤差時,以單像多點(全控點)的方 式,探討以聯合多點,增加多餘觀測數的方式解 算對於水位面定位品質影響,成果部分則以理論 精度來表示。
由圖 18 及圖 19 可以發現,在全控點不同先驗 資訊精度下,藉由多點聯合解算,均可以使水位 面定位精度上升,其上升效果大約為 1/√n,其中 n 為聯合點位之個數。然而,雖藉由多全控點聯合 解算可以提升水位面的定位效果,但是其水位面 定位品質,仍未臻符合實務需求,改善之道應使 用作用較強的物空間約制(如水位面及水深約制等) 來強化解算品質,多點聯合解算則可作為額外的 輔助條件。
3.8 實際衛星立體像對測試
本 研 究 採 用 東 沙 環 礁 異 軌 之 衛 星 影 像 (WorldView-2),水位面資料則採用 NAO99B 潮汐 模式,藉由平均海水面與潮汐推算而得,並假設 水位面為一水平面作為後續解算之條件,使用影 像基本資料如表 13 所示。
像點量測部分,則採用人工量測方式,考量 區域便利性及不同水深位置,針對較能清楚辨識
之 110 個點位進行量測。受限於水下影像之清晰度,
在進行重複量測試驗及分析後,像點人工量測誤 差設為 1 pixel,如圖 20 展示異軌立體像對以及部 分量測之點位。
而實驗區水下地形參考資料,則採用空載測 深光達所產生之 5 m 解析度之數值地形模型作為驗 證 之 比 對 對 象 。 光 達 資 料 測 取 期 間 : 2010/09/21~26,共量測 143,644,410 個點位,並以 單音束聲納作為驗證之依據,其較差為 30 cm,標 準差為 24.8 cm,如圖 21 所示,詳細數據則可參考
史天元等(2012)。
在實際影像中因無法確保解算時只具有像點 量測誤差,且水位面可能會受到潮汐或是海洋波 動所影響,潮汐模式亦隱含誤差,在此實驗中,
並無法獲得水位面真值,所有數據成果比對將著 重在整體趨勢上的分析。根據不同先驗資訊,在 平差中給予先驗資訊不同權重,進行後續之成果 分析。成果分析表示方式,則依表 14 所示進行,
其中所指的「差值」均由最或是值減去參考值(包括 依潮位模式推算的水位面及光達點位坐標)。
表 13 衛星異軌立體像對基本資料(多光譜)
異軌 區域 衛星 日期 拍攝角 方位角 GSD 交會角 影像(一) 東沙
環礁 WorldView-2 2013/8/9 20.1 o 215.3 o
2.0 m 52.81o 影像(二) 2013/9/25 40 o 117.9 o
表 14 成果分析表示方式說明
項目 分析指標
水下物點
水平定位品質 以其與水位面完全已知所計算之水平坐標之差值表示
水下物點
高程定位品質 以其與水位面完全已知所計算之水平坐標對應之參考資料高程值之差值表示 水位面定位品質 以其與在 NAO99B 潮汐模式下,藉由平均海水面與潮汐推算而得之水位面之差
值表示
圖 18 單像多點(全控點)對於水位面定位品質效果
圖 19 單像多點(無誤差全控點)對於水位面定位成果趨勢圖
圖 20 異軌立體像對/部分代表點位展示(影像由內 政部提供)
圖 21 東沙地區測深光達數值地形模型(史天元等,
2012),共量測 110 個點位(紅框處)
3.8.1 與光達資料之比較成果
在水位面為完全已知時,本研究所提出之方 法定位成果與測深光達資料差值約為 2 m(如表 15)。
此差值除了因物像對應參數及觀測量誤差所導致
之外,其它原因可能來自於: (1)資料之間的時間 差異、(2)潮汐模式誤差、(3)水位面波動等因素。
表 15 水位面為完全已知/未知時成果分析
影像種類 異軌立體影像對
高程定位與參考資料差值 1.890 m 條件數(水位面完全已知) 1.25E+01 條件數(水位面完全未知) 1.52E+11
水位面完全未知下,
定位成果(pixel)
X 0.133 Y 0.098 Z 53.061 d1 136.749 d2 87.139
而在水位面完全未知下,解算系統呈現高度 弱幾何,其水位面及水下物點定位誤差過大,水 位面誤差遠超過波浪或潮汐的可接受之預估範疇,
而水下物點誤差值亦超出可視水深,因此定位成 果並不具有可用性。實務上,必須納入不同可資 使用之物空間約制加以改善此情形。後續約制實 驗,採 13 個於淺水及深水(以水深 5 m 處區分)點位 進行聯合解算,除分析其水位面求解品質之外,
並方便檢視參與解算物點之各別定位精度。另外 亦施行全區 110 個點位之聯合解算,並給予在此高 多餘觀測數解算條件下水位面之品質增益以及物 點三維定位之平均品質。
3.8.2 水位面約制
本研究依照東沙國際海洋觀測站所公布之東 沙環礁地區整體波浪高度大約在 1 至 2 m,假設水 位面具有 2 m 之誤差(約為 1pixel)進行解算。在表 16 中,顯示藉由加入水位面約制可以提升水下物 點的定位品質,而因衛星的 FOV 較小,因此在實 驗區中之各點加入約制後,由於入射角相近,其 定位品質相當。在水位面 2 m 先驗精度約制下,由 13 個點位聯合解算,所獲致之物點定位水平分量 誤差極小,但此部分應是資料處理方式(如表 14 內 容描述)造成之必然;而物點高程分量品質介於 0.5~2.5 pixels (即 1.0~5.0 m);兩水位面品質分別提 升至 0.10 pixels (0.2 m)及 0.17 pixels (0.34 m)。而採 行全區 110 個點位聯合解算之成效,在物點高程品 值約為 2 m,兩水位面品質分別為 0.41 m 及 0.66 m,反而不及僅用 13 個點位所解算之成果。
3.8.3 高控點約制
本研究以光達資料所提供之高程值作為先驗 資訊,誤差部分則以此組光達資料與聲納之較差 0.3 m,作為先驗資訊精度之考量,高控點約制解 算成果如表 17。於模擬資料分析中,已得知物點 高程坐標與水位面參數之間具有高度相關性,故
高控點可以幫助水位面參數的解算。聯合 13 個點 位,在引用高控點約制之解算模式下,獲致兩水 位面品質分別為 3.8 pixels (7.6 m)及 0.7 pixels (1.4 m),此水位面解算品質差異應主要來自入射角差 異(參照圖 9)。而採用 110 個高控點聯合解算,兩 水位面品質分別提升至 2.5 m 及 0.0 m,可具體顯 示高控點約制在增益於水位面品質之實質功效。
3.8.4 全控點約制
在全控點約制的誤差授予,除了在高程部分 採用與高控點約制相同的先驗精度外,於水平分 量先驗資訊部分,因資料取得之困難,故考慮參 照模擬資料中,假設量測像點具有 1 pixel 之誤差 下,水平分量約具有 0.8 pixels 之誤差,以此量值 作為後續全控點水平分量誤差量值。全控點約制 解算成果如表 18 所示。
從模擬實驗成果得知水平分量約制對解算成 果之定位品質助益不大,因此,全控點約制的解 算成效應與高控點約制相類似。聯合 13 個全控點 約制之解算獲致 2.9 pixels (5.8 m)及 0.8 pixels (1.6 m)之兩水位面品質;聯合 110 個全控點則兩水位面 品質分別提升至 1.7 m 及 0.1 m。此成果略優於使 用高控點約制之解算成效。
表 16 異軌影像(水位面約制)
位置 點號 Difference(pixel)
∆X ∆Y ∆Z ∆d1 ∆d2
淺水
20 -0.017 -0.013 0.708
0.106 -0.170 28 -0.017 -0.013 0.584
33 -0.017 -0.013 2.474 44 -0.017 -0.013 -0.711 38 -0.017 -0.013 0.644
深水
19 -0.017 -0.013 0.394 1 -0.017 -0.013 1.520 82 -0.017 -0.013 1.847 99 -0.017 -0.013 0.887 102 -0.017 -0.013 1.620 103 -0.017 -0.013 1.573 110 -0.017 -0.013 0.467 101 -0.017 -0.013 -1.655
整區(110 個點位)平均 Difference(m/pixel)--差值絕對值平均
∆X ∆Y ∆Z ∆d1 ∆d2
0.067/0.033 0.050/0.025 1.977/0.989 0.411/0.205 0.656/0.328
表 17 異軌影像(高控點約制)
所在處 點號 Difference(pixel)
∆X ∆Y ∆Z ∆d1 ∆d2
淺水
20 -0.118 -0.108 0.000
3.753 0.711 28 -0.116 -0.137 -0.001
33 -0.146 0.289 0.005 44 -0.095 -0.429 -0.005 38 -0.117 -0.123 0.000
深水
19 -0.113 -0.179 -0.001 1 -0.131 0.074 0.002 82 -0.136 0.148 0.003 99 -0.121 -0.068 0.000 102 -0.132 0.097 0.003 103 -0.132 0.086 0.002 110 -0.114 -0.162 -0.001 101 -0.080 -0.642 -0.008
整區(110 個點位)平均 Difference(m/pixel)--差值絕對值平均
∆X ∆Y ∆Z ∆d1 ∆d2
0.113/0.057 0.425/0.212 0.006/0.003 2.485/1.243 0.003/0.002
表 18 異軌實際影像(全控點約制)
所在處 點號 Difference(pixel)
∆X ∆Y ∆Z ∆d1 ∆d2
淺水
20 -0.035 -0.033 0.000
2.904 0.818 28 -0.035 -0.047 -0.001
33 -0.039 0.164 0.007 44 -0.032 -0.192 -0.006 38 -0.035 -0.040 -0.001
深水
19 -0.034 -0.068 -0.002 1 -0.037 0.058 0.003 82 -0.037 0.094 0.004 99 -0.035 -0.013 0.000 102 -0.037 0.069 0.003 103 -0.037 0.064 0.003 110 -0.035 -0.059 -0.001 101 -0.030 -0.297 -0.010
整區(110 個點位)平均 Difference(m/pixel)--差值絕對值平均
∆X ∆Y ∆Z ∆d1 ∆d2
0.033/0.017 0.210/0.105 0.008/0.004 1.682/0.841 0.105/0.053
3.8.5 水深約制
根據內政部之東海與南海島礁資料蒐集及建 置工作期末報告書(內政部,2016)中,以衛星影像 光譜法估計水深之品質可達約 2 m。以水深之先驗 誤差為 2 m 進行水深約制解算,成果如表 19 所示。
水深為相對條件,連結水位面及水下物點高程分 量之高程差關係,藉此提升水位面及水下物點三 維坐標的解算品質。
聯合 13 個水深約制點位之解算獲致 1.9 pixels (3.8 m)及 2.0 pixels (4.0 m)之兩水位面品質,而物 點高程品質介於 0.3 pixels (0.6 m)至 2.6 pixels (5.2 m);聯合 110 個水深約制點位,則兩水位面品質分 別提升至 0.18 m 及 0.16 m,而物點高程平均品質 達 0.21 m,遠優於水位面約制之成效,此成果也完 全回應 3.4 節模擬資料實驗所展示高品質水深約制 在同時解算水位面及水下物點定位任務下之亮眼 表現。
表 19 異軌實際影像(水深約制)
所在處 點號 Difference(pixel)
∆X ∆Y ∆Z ∆d1 ∆d2
淺水
20 0.079 -0.232 0.809
1.856 1.972 28 0.077 -0.194 0.513
33 0.048 0.213 0.602 44 0.095 -0.457 0.380 38 0.075 -0.170 0.468
深水
19 0.066 -0.044 -0.337 1 0.045 0.255 -0.534 82 0.040 0.324 -0.512 99 0.054 0.126 -0.596 102 0.042 0.299 -0.629 103 0.036 0.379 -1.033 110 0.049 0.198 -1.336 101 0.063 -0.004 -2.564
整區(110 個點位)平均 Difference(m/pixel)--差值絕對值平均
∆X ∆Y ∆Z ∆d1 ∆d2
0.028/0.014 0.400/0.200 0.205/0.102 0.181/0.090 0.157/0.079
4. 結論與建議
本研究針對基於有理函數模式所提出之仿成 像光線調變方式,利用逆有理函數勾勒出空氣中 的成像路徑,而後考慮折射效應之影響,得到水 下之雙像成像路徑,並進行水下物點之前方交會,
以同時解算出水位面參數及水下物點三維坐標。
於模式可行性部分,在不具任何誤差下,本模式 可以有效地同時定位出水位面及水下物點三維坐 標。然而,在水位面完全未知下,其解算系統屬 於高條件數之高度弱幾何,再加上折射效應劣化 交會角度,造成解算上的不穩定,其解算成果未 能滿足實務需求。
水位面品質為此定位模式之關鍵,為此,本 研究引入不同物空間約制或以聯合多點求解的方 式來增益水位面解算品質,藉以同時改善水下物 點定位精度。然而,聯合多點解算其效果較不顯 著,且水下環境特殊,可資引用之點位數量及位 置分布不見得那麼充足。因此,在主要的解決方 式上為採用可資使用的物空間約制來進行,在絕 對條件具有良好品質時,以水位面約制效果最佳,
水下物點高程定位品質約可達到 2~3 pixels;另一 方面,高品質之水深資訊約制解算可獲致水位面 定位品質達 1~2pixels,聯合多點位水深約制效果
又會更佳。除此之外,在高品質水深約制模式下,
水下物點高程分量品質更勝於水位面完全已知時 之解算成效。
然而,本研究目前尚未將逆有理函數係數誤 差、其他變因(如水之清澈度與波紋等)納入本模式 中,為更貼近實務可能之種種現況,未來應在物 像對應模式引入前述因子。除此之外,衛星影像 水下物點受成像介質影響,清晰度不佳,人工量 測作業不但耗時疲累,品質亦不理想。為達成量 測自動化及提升像點量測品質,必須引入影像匹 配技術,搭配建置良好的影像匹配策略及方法,
提升本研究作業效能及定位品質。
致謝
本研究承蒙科技部專題研究計畫編號 MOST 105-2119-M-002-053 及 MOST 106-2119-M-002-037 經費補助以及內政部提供測試影像及地形資料,
得以順利完成;文章內容亦由兩位審查者給予諸 多建設性修潤意見,謹此致謝。
參考文獻
內政部,2016。104 年度東海與南海島礁資料蒐集 及建置工作期末報告書。[Ministry of the Interior, 2016. Final Report for Island and Cay Feature
Collection and Establishment in East China Sea and South China Sea in Year 2015. (in Chinese)]
史天元、薛憲文、蕭輔導、陳雅信、徐佳筠、陳 杰宗、陳佳勳,2012。澎湖與東沙環礁測深光 達作業探討,航測及遙測學刊,16(3):151- 166。[Shih, T.Y., Shyue, S.W., Hsio, F.D., Chen, Y.H., Hsu, C.H., Chen, J.C., and Chen. J.H., 2012.
On the 2010 bathymetric lidar survey of Penghu and Dongsha Atoll, Journal of Photogrammetry and Remote Sensing, 16(3): 151-166. (in Chinese)]
周君芸,2009。結合異質衛星影像幾何模式進行 三維定位,國立臺灣大學土木工程究所碩士 論 文 。 [Zhou, J.Y., 2009. 3-D positioning by integrating inhomogeneous geometric models of satellite imagery, Master Thesis, National Taiwan University, Taiwan, ROC. (in Chinese)]
邱庭萱,2016。以攝影測量進行水位面及水下物 點坐標解算,國立臺灣大學土木工程學研究 所碩士論文。[Qiu, T.X., 2016. Photogrammetric determination of water surface and underwater object points, Master Thesis, National Taiwan University, Taiwan, ROC. (in Chinese)]
洪欣宇,2017。利用高解析衛星立體像對產製近 岸水底地形,國立中央大學土木工程學系研 究所碩士論文。[Hung, H.Y., 2017. Bathymetry mapping using high resolution satellite stereo-pair imagery, Master Thesis, National Central University, Taiwan, ROC. (in Chinese)]
國家實驗研究院國家太空中心,2011。福衛二號衛 星 影 像 精 選 - 東 沙 環 礁 , https://www.nspo.narl.org.tw/Upload/WImage/00 0008/20110812_01_D.jpg,引用 2018/06/30。
[National Space Organization, 2011. Formosat-2 Images - Donghsa atoll, Avaiable at:
https://www.nspo.narl.org.tw/Upload/WImage/00 0008/20110812_01_D.jpg , Accessed June 30, 2018. (in Chinese)]
黃聖日、趙鍵哲,2014。自空氣往水中之攝影測 量前方交會定位分析,第三十三屆測量及空
間資訊研討會論文集,pp.1111-1122。[Huang, S.J., and Jaw, J.J., 2014. Air-to-water photogrammetric intersection, The 33th Conference on Surveying and Geomatics, Taipei, pp.1111-1122.(in Chinese)]
劉建良、陳良健、王成機、徐偉城,2016。應用衛 星 影像 測繪 南海 島礁 ,航測 及遙 測學 刊,
20(1):43-60。[Liu, C.L., Chen, L.C., Wang, C.G., and Hsu, W.C., 2016. Island mapping for South China Sea using satellite images, Journal of Photogrammetry and Remote Sensing, 20(1): 43- 60. (in Chinese)]
Glassner, A.S., 1989. An Introduction To Ray Tracing:
Surface Physics for Ray Tracing, Harcourt Brace Jovanovich Publishers, London, UK, 137-141.
Kotowski, R., 1988. Phototriangulation in multi-media photogrammetry, International Archives of Photogrammetry and Remote Sensing (ISPRS 1988), Congress Kyoto, 27(5): 324-334.
Lee, G.F., Jones-Lee, A., and Rast, W., 1995. Secchi depth as a water quality parameter, Report of G.
Fred Lee and Associates, El Macero, CA.
Lee, K.C., and Jaw, J.J., 2017. Quality and effectiveness of geometric approach solving water surface and underwater object points, The 38th Asian Conference on Remote Sensing (ACRS2017), New Delhi, India.
Lee, K.C., and Jaw, J.J., 2018. Water surface determination through photogrammetric intersection employing control information, International Symposium on Remote Sensing(ISRS2018), Korea.
Li, R., Li, H., Zou, W., Smith, R.G., and Curran, T., 1997. Quantitative photogrammetric analysis of digital underwater video imagery, IEEE Journal of Oceanic Engineering, 22(2): 364-375.
Maas, H.G., 1995. New developments in multimedia photogrammetry, Optical 3-D Measurement
Techniques III, Wichmann Verlag, Karlsruhe, 91- 97.
Mulsow, C., 2010. A flexible multi-media bundle approach, International Archives of Photogrammetry and Remote Sensing and Spatial Information Sciences, Newcastle upon Tyne, UK, 38(5): 472-477.
Murase, T., Tanaka, M., Tani, T., Miyashita, Y., Ohkawa, N., Ishiguro, S., Suzuki Y., Kayanne, H., and Yamano, H., 2008. A photogrammetric correction procedure for light refraction effects at a two- medium boundary, Photogrammetric Engineering and Remote Sensing, 74(9): 1129-113.
Nagasubramanian, V., Radhadevi, P.V., Ramachandran, R., and Krishnan, R., 2008. 3D reconstruction
with rational function model, Journal of the Indian Society of Remote Sensing, 36(1): 27-35.
Okamoto, A., and Höhle J., 1972. Allgemeines analytisches orientierungsverfahren in der zwei- und mehrmedien-photogrammetrie und seine erprobung, Zeitschrift für Photogrammetrie und Fernerkundung, 40(3): 112-119.
Tao, C.V., and Hu, Y., 2001. A comprehensive study of the rational function model for photogrammetric processing, Photogrammetric Engineering and Remote Sensing, 67(12): 1347-1357.
Yang, X., 2000. Accuracy of rational function approximation in photogrammetry, The ASPRS Annual Conference, Washington, DC.
1 Master, Department of Civil Engineering, National Taiwan University Received Date: Mar. 29, 2019
2 Associate Professor, Department of Civil Engineering, National Taiwan University Revised Date: Apr. 22, 2019
* Corresponding Author, Tel: 886-2-23678645, E-mail: [email protected] Accepted Date: May. 29, 2019
Simultaneously Determining Water Surface and Underwater Object Points based on Rational Function Model by Using
Satellite Images
Ya-Po Chang
1Jen-Jer Jaw
2*Abstract
Nowadays, most satellite imagery vendors offer rational polynomial coefficients (RPCs) to users for processing geometric information. Although known RPCs in rational function model (RFM) would give explicit object-to-image correspondence, the physical meaning of the parameters is hard to be interpreted. Especially, when faced with underwater object points, the object-to-image correspondence cannot be directly realized by these RPCs due to the refraction effect. To cope with this situation, this study proposes an alternative way in the imaging rays under RFM and refraction effect to determine both the water surface and underwater object points. A generalized least-squares adjustment with constraints is developed to well handle functional and stochastic models. To its essence provided that the water surface is totally unknown, the refraction vectors under the water varying with estimated water surface through each iteration results in a weak geometry and leads to unstable solutions. In addition to revealing the characteristics of aforementioned object-to-image correspondence, this study explores how the underwater object point and water surface determination would benefit from the prior observations of water surface, vertical control point, full control point, and even water depth. The effect of using multiple points is also investigated in this study. In experiment part, this study uses not only simulation data but also real satellite imagery to verify the feasibility of the proposed model. And it can be summarized that the quality of water surface, either through priori information or derived from control information, is crucial to the positioning performance of underwater object points. The accuracy of water depth better than 2m, under employed satellite imagery, would supply water surface with 1-2 pixels positioning quality, and even bring about superior underwater object point coordinates as compared to when they are to be determined through perfect water surface.