行政院國家科學委員會專題研究計畫 成果報告
汽機車乘客頸部鞭打症模擬使用新發展的人偶頭頸電腦模
型
計畫類別: 個別型計畫 計畫編號: NSC94-2213-E-006-102- 執行期間: 94 年 08 月 01 日至 95 年 07 月 31 日 執行單位: 國立成功大學機械工程學系(所) 計畫主持人: 黃才炯 計畫參與人員: 吳鈞泰、張德正、吳明錦 報告類型: 精簡報告 處理方式: 本計畫可公開查詢中 華 民 國 95 年 10 月 30 日
中文摘要
在汽機車的事故中,一般人常會把焦點放在車速較快的前撞部分,而較容易忽略 後撞的情形,尤其是慢速後撞的情形,與前撞相比,外傷的程度較小,但在後撞的傷 害上,最常見的為鞭甩性傷害(Whiplash Injury),此傷害主要在於頸部椎間盤、韌帶、 頸部肌肉以及神經的部份,其傷害一般並不會造成死亡,且在外觀上並不會有明顯的 傷痕,但鞭打性傷害會造成頸部疼痛,並使得頸部變得脆弱,以致於頸部在未來容易 受到傷害。而發生的成因主要是因為後撞時,頭部因慣性作用停留原地,相對於頸部 而 言 呈 現 向 前 彎 曲 (Flexion) 的 狀 態 , 而 頸 部 下 方 因 胸 部 的 帶 動 而 向 後 拉 伸 (Extension),在此向前向後的變化之下便造成鞭甩性傷害。 本計畫主要目的在於發展乘客的頭頸模型,用來模擬後撞所造成的鞭甩性傷害。 一般在汽車碰撞中駕駛者及乘客是採用人體模擬測試裝置(Anthropomorphic test devices, ATD)或碰撞測試人偶(Dummy),但現今這些裝置並未能有效模擬出後撞所造 成的鞭甩性傷害,因此將以現有的 ATD 頭頸模型做適當的修正,尤其加入鞭甩性傷 害所著重的頸部肌肉及韌帶,並以適當的接頭(Joint)模擬椎間盤部分,使得模型頸部 以質量塊(Lumped-mass)連結與真人頸部相似,分析受到後撞時頸部的運動及受力情 形,並與現有的測試資料相比,以達到擬人的目的。 進一步以現今已有的傷害準則,搭配本研究模型,藉以了解傷害準則指標於後撞 過程中隨著各個撞擊速度下的變化情形,包括 NIC、Nkm、LNL 及 WIC。 關鍵字:鞭甩性傷害,人體模擬測試裝置,碰撞測試人偶,頭頸模型,多體動力學Abstract
Most of vehicle accidental studies normally focus on the front high speed impact and easily neglect the rear–end collision especially in the low speed condition. With comparison to the front impact, the injury resulted from rear impact is usually slight. But, it could develop a kind of neck injury on intervertebral discs, ligaments, muscles and nerves. Thisinjury iscalled aswhiplash injury.Whiplash injury couldn’tlead to fatal,butitmay let neck weak and easily get hurt in the future.
The conventional anthropomorphic test devices (ATDs) or dummies are usually utilized as the tools to evaluate the vehicle safety in the car crash test. However, their capability on the behavior of whiplash is insignificant. Therefore, there is a need to modify the current ATD neck system. In this study, the main purpose is to develop a head-neck complex model which is capable of simulating whiplash injury in the rear-end collision. To act like human, the head neck system could be modeled by adding the appropriate mechanical surrogates such as muscles, ligaments, and articulations in this complex. This head neck model is based on multibody dynamics and the volunteer test data in kinematics are used to perform the biofidelic validation.
In order to understand the relationship between whiplash injury and the parameters of the input energy, two different sets of simulation cases are performed in this study. They are the same peak of acceleration with different time duration and the same impact duration with different acceleration peak. The results with comparison to the current available injury criterion such as NIC, Nkm, LNL, and WIC, are discussed in this study.
目錄
中文摘要... I Abstract ...II 目錄...III 圖目錄... IV 表目錄...V 一、前言... 1 二、研究目的... 4 三、文獻探討... 5 四、研究方法... 8 五、結果與討論... 15 六、結論與建議... 21 七、參考文獻... 23圖目錄
圖 1 後撞過程示意圖... 2
圖 2 鞭甩階段示意圖(Panjabi et al., 1998) ... 2
圖 3 DYNAMAN 模型圖 ... 8
圖 4 AATD 頭頸示意圖(Schneider et al., 1983)... 9
圖 5 JARI 滑車測試裝置(Ono et al., 1999) ... 10
圖 6 JARI 滑車測試加速度 ... 11 圖 7 自願者 T1 加速度 ... 11 圖 8 轉移函數輸入與輸出... 13 圖 9 各速度下滑車加速度(固定波形持續時間) ... 13 圖 10 各速度下滑車加速度(固定加速度峰值) ... 14 圖 11 生物真實性驗證結果 ... 16 圖 12 各速度下 T1 加速度(固定波形持續時間)... 17 圖 13 各速度下 T1 X 方向加速度(固定加速度峰值)... 18 圖 14 NIC 與速度變化量之關係 ... 19 圖 15 Nkm、LNL 及 WIC 與速度變化量之關係 ... 20
表目錄
表 1 Nkm 方向定義... 6 表 2 椎間盤剛性常數(Wheeldon, 2006)... 10 表 3 CVR 值比較... 17
一、前言
在汽機車的碰撞意外中,一般人直覺的認為車速越快所造成的傷害也就越大,對 於一些車內的安全設備也因而較注重於防止前撞所造成的傷害,如安全帶及安全氣囊 等設備,而忽略了低速後撞的情形,在此處低速亦即為頸部傷害最常發生的時速,根 據 Kahane(1982)及 Olsson(1990)研究中發現,此時速僅大約為 20 km/hr,低速後撞所 造成的傷害,以鞭甩傷害最為常見,若以簡易外傷分數 AIS(Abbreviated Injury Scale) 來判定其傷害程度,大約屬於 AIS1 的等級,屬於輕度傷害(AAAM, 1990),雖然所造 成的傷害不至於危及生命,但會使得頸部內脊椎、肌肉或韌帶受到損傷,甚至傷害範 圍可能延至傷者的上肢及肩膀,擴大傷害範圍,亦有可能伴隨腦震盪的產生,並使得 頸部變得脆弱(Foreman and Croft, 1988; Macnab, 1982),傷害程度不可小覷(Barnsley et al, 1994),其傷害屬於長期,使乘客可能在工作能力上受到影響,消耗社會成本、降 低生產力。 在 早 期 的 研 究 中 認 為 造 成 後 撞 傷 害 的 主 要 原 因 來 自 於 頸 部 向 後 過 度 拉 伸 (Hyperextension)(Macnab, 1964; States, 1969),然而事實並不然,根據近幾年的研究指 出,後撞傷害的成因常來自於鞭甩過程中所造成的 S 型變形(S-shape),使得各頸椎間 呈現局部過度伸張的情形,而此發生的時機發生於過度拉伸之前(Panjabi et al., 1998; Yang et al., 1997; Ono et al., 1997)。影響鞭甩性傷害的因素相當多,包括乘客體型及其 乘坐位置,根據研究發現,女性發生此類鞭甩性傷害的機率大約為男性的兩倍 (Kihlberg, 1969; States et al., 1972; Kahane, 1982; Otremski et al., 1989; Foret-Bruno et al., 1991; vKoch et al., 1995; Spitzer et al., 1995),而後座乘客相較於前座乘客而言,機 率大約為 50%(Kihlberg, 1969; States et al., 1972; Carlsson et al., 1985; Lövsund et al., 1988; Otremski et al., 1989)。
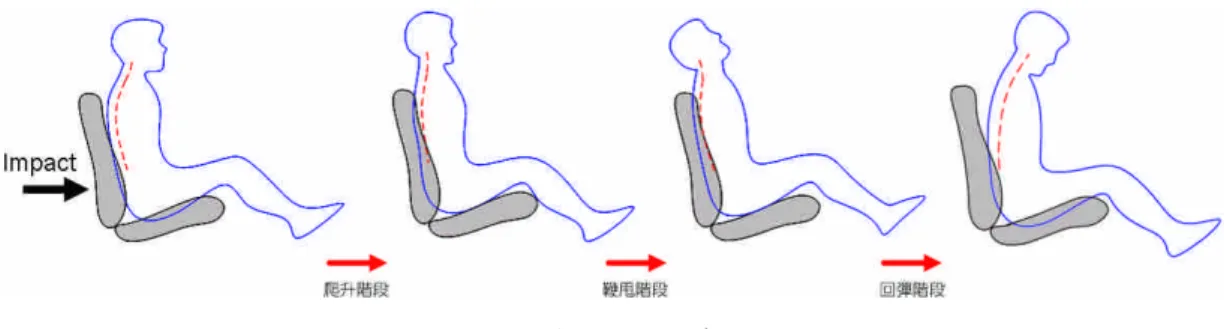
人體模擬裝置(Anthropomorphic Test Device, ATD)或碰撞人偶(Dummy)是一種常 用於替代真人於汽車碰撞測試的裝置,現今採用的人偶為海伯三號(Hybrid III)人偶 (Foster et al, 1977),其頭頸部分在受力方面雖然可以配合人的反應,但與實人測驗結 果相比,其運動狀態仍無法達到像人一樣的效果,其主要原因在於 Hybrid III 的頸部 過於僵硬,與真人相比頸部相對強壯許多,且加上 Hybrid III 第一胸椎 T1 無法旋轉 的限制,使得運動表現上產生相當大的誤差。對於前撞較高速的情形而言,頭頸部分 的運動主要表現在頭部較大的質量上,因此頸部的差異並不明顯,Hybrid III 也就足 以運用在測試上,然而後撞過程中頸部反應相對複雜很多。 一般而言後撞過程主要分成三個階段,如圖 1 所示,當乘客受到後方撞擊時,椅 背向前而人體軀幹暫時因慣性停留原地,造成椅背變形,此外由於椅背為一斜面,使 得軀幹沿著椅背斜面向上爬升,且當軀幹向上爬升過程時,脊柱也同時因後方受力而 從彎曲的情形逐漸打直,若以第一胸椎(T1)Z 方向的運動情形來看,將會有稍微增加 的趨勢,在此過程中為第一階段,稱為爬升階段(Ramping)。
圖 1 後撞過程示意圖 第二階段為本研究所重視的部份,稱為鞭甩階段(Whiplash),也是一般後方撞擊 最常發生傷害的階段,在此過程中可再細分成兩個運動過程,如圖 2 所示,由於胸部 於第一階段受到椅背推擠向前運動,而頭部仍因慣性停留原地,造成頭部相對軀幹向 後近似平移的運動,稱為頭部延遲(Head lag),而造成頸椎呈現 S 型的變形,此過程 稱為收縮(Retraction motion),而後因能量逐漸向上傳遞,使頭部開始向後甩動,呈現 拉伸的狀態,稱為伸張過程(Extension motion),若將頸椎分成兩個部份,第一及第二 頸椎(C1、C2)稱為上位頸椎,而第三至第七頸椎(C3~C7)稱為下位頸椎,在收縮過程 中,可看出頭部及上位頸椎呈現局部向前彎曲的情形,而下位頸椎因軀幹向前運動呈 現向後伸張的狀態,造成頸椎呈現 S 型變形。 圖 2 鞭甩階段示意圖(Panjabi et al., 1998) 第三階段為回彈階段,主要由於第二階段中頭頸向後拉伸使得頭頸肌肉開始產生 收縮力,欲使頭頸回復其正常位置,然而撞擊加速度於後期瞬間下降,以至收縮力過 大造成頭頸及上軀幹部分向前回彈的現象。此外,若後方撞擊速度較快,椅背吸收能 量過多,而釋放的能量也相對較多,將會使得回彈的狀況如同前方撞擊一般,軀幹向 前運動,倘若乘客沒有使用安全帶或者安全帶的拘束力量不足,將有可能導致頭部或 胸部撞擊前方儀表板或是方向盤,造成後方撞擊的二次傷害。 鞭甩傷害的成因主要來自於頸部運動過程中所產生的 S 型變形,然而 S 型變形之 所以造成傷害的主因仍不是很明確,根據不同學者的觀察及研究有不同的看法,也因
此產生不同的傷害判斷準則,例如 NIC(Boström et al., 1996)是由頸部壓力瞬間變化的 理論為基礎,Nij(Klinich et al., 1996; Kelinberger et al., 1998)及 Nkm(Schmitt et al., 2001) 是藉由頸部所受到的拉伸力或剪力及 OC 位置(Occipital condyle, 枕髁)所受到的力 矩,判斷是否產生頸部損傷,LNL-index(Heiplatz et al., 2003)著重於下頸部的受力, WIC(Muñoz et al., 2005)是根據上、下頸部力矩差的觀念為根據,各傷害準則皆以材 料破壞準則的概念,藉由計算出的數值,比較已定訂的臨界值,以判斷是否產生傷害。
二、研究目的
現今已有不少車廠強調汽車的安全性,而發展出多種具有保護程駕駛者的設備, 最典型的例子為安全帶,但如何評估此類安全設備是否能充份及有效發揮保護乘客性 權的作用,就必須仰賴人體模擬裝置(Anthropomorphic Test Device, ATD)或碰撞人偶 (Dummy),其主要目的是在於替代真人進行汽車碰撞測試,現今採用的人偶為海伯三 號(Hybrid III)人偶 (之後以 Hybrid III 稱之),其頭頸部分在受力方面雖然可以配合人 的反應,但與真人測試結果相比,其運動狀態仍無法達到像人一樣的效果,主要原因 在於 Hybrid III 的頸部過於僵硬,加上 Hybrid III 第一胸椎 T1 無法旋轉的限制,使得 運動表現上產生相當大的誤差。
目 前 已 有 不 少 針 對 後 撞 所 開 發 的 人 偶 , 如 RID-neck(Rear impact
dummy-neck)(Svensson and Lövsund, 1992) 、 TRID-neck(TNO rear impact
dummy-neck)(Thunnissen et al., 1996)、BioRID(Biofidelic rear impact dummy)(Davidsson et al., 1998a; linder et al., 1998)等,RID-neck 及 TRID-neck 主要仍以 Hybrid III 為基礎, 特別針對頸部加以改善,而 BioRID 在人體幾何上較接近真人,將人體 24 塊脊椎完 全表現出來,然而對於以上後撞人偶而言,仍有其不足及其發展限制之處。 而本研究主要在於建立一個多體動力學電腦模型,利用多體動力學多連桿理論的 運算方式,相較於有限元素分析而言,能夠快速模擬出頭頸在受到衝擊時所表現的運 動模式及受力狀態,對於頭頸模型設計初期具有很大的助益。此外,藉由運動及受力 狀態,利用各傷害準則的計算方式,能夠了解乘客於碰撞過程中期頭頸傷害的變化, 進而能提供汽車安全設計者於傷害防護上的參考。
三、文獻探討
傷害準則
現今常用來作為頸部傷害量化準則的方式主要以美國聯邦安全標準 FMVSS (Federal motor vehicle safety standard)所規範的 Nij 為標準,然而 Nij 著重於頸部所承 受的軸向力及力矩,較適用於前撞所產生的向前擺動及其與安全氣囊的相互作用,對 於後撞較著重於頸部局部變形的鞭甩行為較不適用。現今有關於後撞傷害的準則主要 有 NIC、Nkm、LNL-index、WIC、IV-NIC 及 NDC,其中以 NIC 及 Nkm 發展較為完 善,其餘對於傷害判定的時機及其發生傷害的臨界值並無記錄,此有待更多實驗加以 探討。以下先針對傷害準則 NIC、Nkm、LNL-index 及 WIC 做一介紹。 NIC(Boström et al., 1996) 當人體頸部向前彎曲時,會使得頸椎內部脊柱管伸長,截面積稍微變小,而頸部 向後伸展時,脊柱管縮短且截面積稍微增加(Breig, 1978),因脊柱管內血液可經由脊 椎間所存在的椎間孔連結至頸椎旁的動靜脈,若假設脊柱管內部為不可壓縮流體 (Estes and McElhaney, 1970),則當脊柱管伸長時,外部流體會自然的向脊柱管內流 動,而脊柱管壓縮時,內部流體能夠向外釋放,於一般前彎後仰的情況下,血液均能 夠自然且順利流通於脊柱管內外,但當鞭甩行為發生時,頸部急速由前彎至後仰,過 程相當快速,對於連接脊柱管內外部的流體將會產生壓力梯度,因而造成集中應力, 使得椎間孔位置附近的組織及神經發生傷害 (Svensson et al., 1993)。 Boström 等人(1996)根據此壓力變化的原理,藉由 OC 相對於 T1 X 方向加速度及 X 方向速度的計算歸納出 NIC 的計算法,計算公式如下。 2 1 NIC( ) ( ) 0.2 ( ( )) ( ) ( ) ( ) ( ) ( ) rel rel T Head rel x x rel rel t a t v t a t a t a t v t a t dt
(1) ( ) rel a t :頭部 CG 與 T1 之相對加速度 ( ) rel v t :頭部 CG 與 T1 之相對速度 1 ( ) T x a t :軀幹 T1 位置 X 方向加速度 ( ) Head x a t :頭部 CG 位置 X 方向加速度 NIC 用來判斷傷害的臨界值為 15 m2/sec2,然而由上述公式可以發現,無論是速 度或者加速度皆只考慮 X 方向的分量,並不考慮頭頸的轉動及 Z 方向的分量,也因 此造成 NIC 在使用上的限制。在後撞過程中,一開始會產生頭部延遲的現象,此時 頭部可視為只有在 X 方向移動,因此以 NIC 計算是可行的,隨著時間的增加,頭部重心開始向後移動,軀幹向前,使得頭部開始做甩動的動作,Z 方向分量及角度變化 的影響逐漸突顯,因此 NIC 在此過程中也就無法適用,根據學者研究發現,NIC 只 適用於後撞過程前 150 msec,意即鞭甩過程的收縮狀態(Boström et al., 1996)。 Nkm(Schmitt et al., 2001)
Barnsley 和 Lord 等人認為鞭甩傷害所產生的 S 型變形會造成相鄰頸椎間後方椎 面關節(Facet joint)壓縮(Barnsley et al., 1995; Lord et al., 1996),當椎面關節壓縮會使得 頸椎間所能承受的剪力剛性降低(Yang et al., 1997),因此只要存在些微的剪力,就易 造成相鄰頸椎產生錯位的情形,傷害因而發生,利用 Nij 採用軸向力與力矩相互作用 的概念,而提供頸部傷害準則 Nkm 以剪力及力矩的線性組合為發展依據,Nkm 計算 公式如(2)式。 _ int int ( ) ( ) Nkm( )t Fup shear t Mup t F M (2) int F :剪力臨界值 = 845 N int M :力矩臨界值,若Mup 0 Mint=88.1 Nm 若Mup 0 Mint=47.5 Nm 與 Nij 相同,隨著不同方向的剪力及力矩可以組成四種不同的組合,分別為 Nfa、 Nea、Nfp、Nep,其定義如表 1 (f : flexion, e : extension, a : anterior, p : posterior)。
表 1 Nkm 方向定義 Nkm 剪力 力矩 Nfa 向前彎曲Mup 0 Nea 向前剪力Fup shear_ 0 (頭部向後軀幹向前) 向後拉伸Mup 0 Nfp 向前彎曲Mup 0 Nep 向後剪力Fup shear_ 0 (頭部向前軀幹向後) 向後拉伸Mup 0 LNL-index(Heiplatz et al., 2003) 以上述 NIC 及 Nkm 的計算公式可了解所量測到的數據皆以上頸部 OC 位置為目 標,然而 S 型變形中的反曲位置主要位於下頸部 C3-C4 及 C4-C5 的部分,因此 Heiplatz 等人便提出 LNL-index 傷害準則,藉由下頸部 C7-T1 位置所量測到的力量及力矩值, 根據(3)式以計算出 LNL-index。
2 2 2 2 _ _ _ _ _ ( ) ( ) ( ) ( ) ( ) ( ) lw y lw x lw x lw y moment shear lw z tension M t M t F t F t LNL index t C C F t C (3) _ lw y M :下頸部 Y 方向力矩 _ lw x M :下頸部 X 方向力矩 _ lw x F :下頸部 X 方向作用力 _ lw y F :下頸部 Y 方向作用力 _ lw z F :下頸部 Z 方向作用力 其中Cmoment 15 Nm 250 shear C N 900 tension C N 若只考慮頭頸僅做向前彎曲向後拉伸的動作,則Mlw x_ 、Flw y_ 可省略。 WIC(Muñoz et al., 2005) 而另一傷害準則 WIC 主要根據 S 型變形的發生主因同時具備上頸部向前彎曲與 下頸部向後拉伸的情況,而以上下頸部所受到的力矩差為依據,計算公式如(4)式。 up lw WICM M (4)
四、研究方法
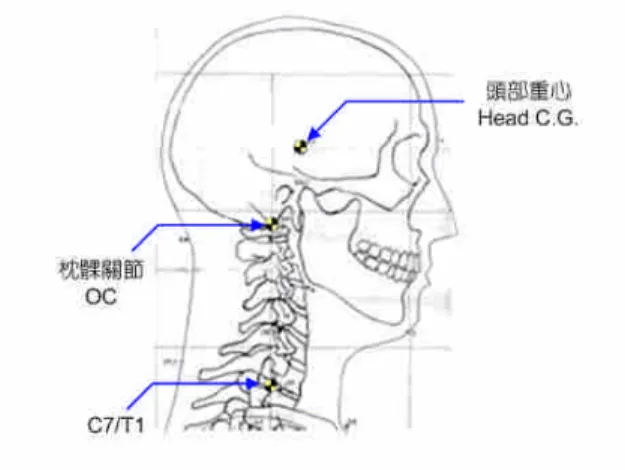
模型建立 模型的建立主要以 THOR 為基礎,保存 THOR 已有的優點,包含頭頸部韌帶及 肌肉的設計概念,及其枕髁關節(以下以 OC 稱之,位於頭骨枕髁與 C1 之間)能夠旋 轉的可能,以能夠表現點頭的動作,由於 THOR 當時是針對前撞情況所建立出來的 人偶,相較於 BioRID 或者是 RID-neck、TRID-neck 等將各頸椎分別建立出來的情況, 在後撞較注重於頸部局部運動的情形下,BioRID 具有較好的運動及動態反應,然而 BioRID 卻有發展上的限制,因其各頸椎間以 PIN 接頭作為連結,若以日後發展多方 向撞擊人偶為考量,只能做前後運動的 BioRID 將會遇到無法針對多方撞擊測試的限 制,若以此為發展重點,THOR 的發展性將會較優於 BioRID,而本研究所建立的模 型將結合兩者的優點,包含 THOR 所擁有的頭頸肌肉及韌帶機構,加上 BioRID 七塊 頸椎分別建立的概念,以達到模型擬人的效果,模型建立如圖 3 所示。 圖 3 DYNAMAN 模型圖 本研究以多體動力學為理論基礎的電腦模擬軟體 DYNAMAN 作為模擬工具,主 要分為幾個部份。 頸椎建立 在多體動力學中是以質量塊連接的方式建立模型,隨著所需的要求,利用不同的 接頭達到不同的目的,在此處建立的頸椎及頭部主要只考慮 2D 平面上前後的運動, 因此僅以 PIN 接頭作為連結。外觀幾何主要參照密西根大學所研發新進人偶幾何 AATD(Advanced Anthroporphic Test Dummy)(Schneider et al., 1983),如圖 4,以美國第50%男性的體型為模型建立的尺寸基準,並配合之後模型驗證的部份,與自願者測試 的量測位置相比以做適當的位置修正。
圖 4 AATD 頭頸示意圖(Schneider et al., 1983)
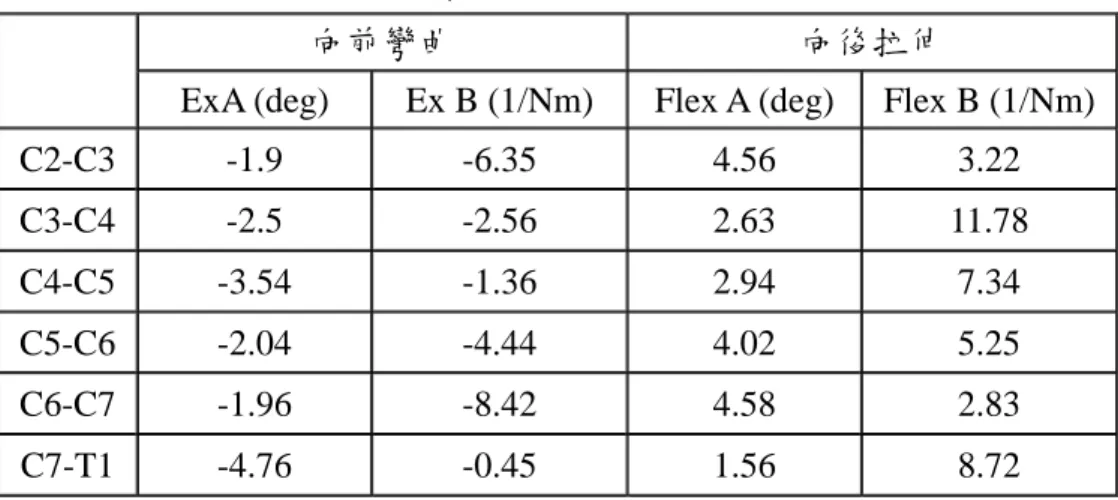
各質量塊的質量及慣性矩主要參考 Robbin(1983)及 Jager(1996)所量測到各頸椎 的慣性量。為了在頸椎模型上以及日後根據此模型所建立的實際人偶頸部方便為考 量,以 C1~C7 的平均值為設定依據 肌肉及韌帶建立 藉由彈簧(Spring)、阻尼(Damper)及鋼索(Cable),用以等效肌肉及韌帶的特性, 此部分並不以將人體所擁有的頸部肌肉及韌帶完全建立出來為目的,而是利用簡單的 機構原件組合的方式將頭頸肌肉及韌帶特性表現出來為主。 轉動極限 人體頸椎及頭部在轉動時具有其轉動極限,隨著各頸椎位置的不同而有不同的極 限值,此處所參考的角度極限值資料主要來自於 Ivancic(2004)針對大體頸部所做的靜 態測試,量測各頸椎間所能轉動的最大角度。 椎間盤建立 除了第一頸椎 C1 及第二頸椎 C2 外,其餘脊椎間皆具有椎間盤,本研究主要參 考 Wheeldon 等人(2006)所做出的資料為依據,其實驗方式是在相鄰兩頸椎間施加固 定的力矩,以觀察轉動的角度為何。其結果可用一條回歸線公式加以表示,本研究所 建立的模型,椎間盤部分是以線彈簧及阻尼建構而成,因此將施加的力矩M 及轉動
角度以施力F及伸長量換算之,其式改寫為(5)式,其中 A、B 如表 2 所式。 ln(2 1) Ar BrF (5) :椎間盤彈簧伸長量 F:施加靜態力量 表 2 椎間盤剛性常數(Wheeldon, 2006) 向前彎曲 向後拉伸
ExA (deg) Ex B (1/Nm) Flex A (deg) Flex B (1/Nm)
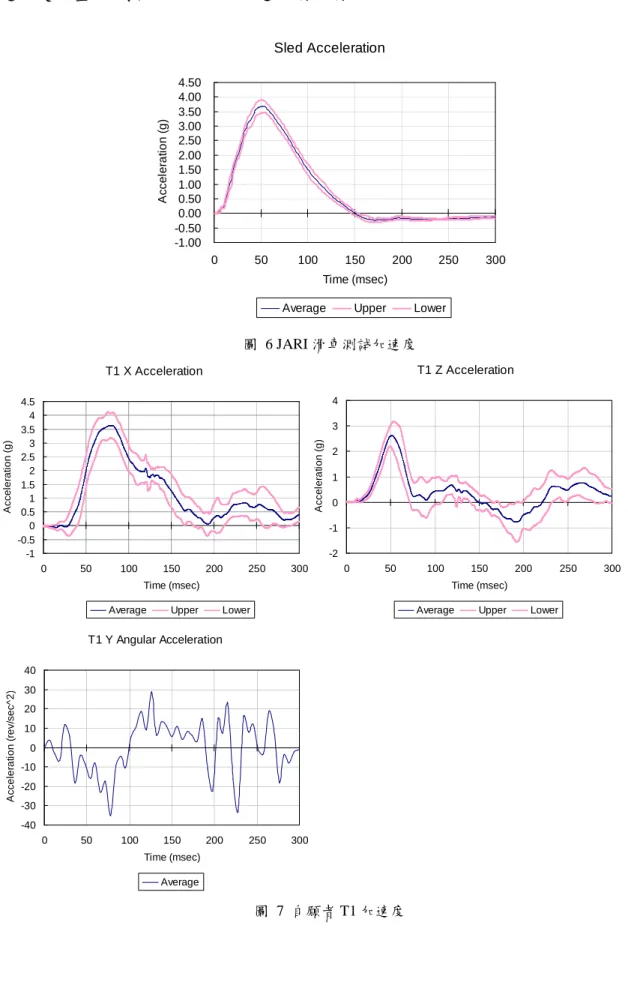
C2-C3 -1.9 -6.35 4.56 3.22 C3-C4 -2.5 -2.56 2.63 11.78 C4-C5 -3.54 -1.36 2.94 7.34 C5-C6 -2.04 -4.44 4.02 5.25 C6-C7 -1.96 -8.42 4.58 2.83 C7-T1 -4.76 -0.45 1.56 8.72 但此資料並不足以提供完整模擬椎間盤所需要的性質,主要原因在於 Wheeldon 等人所做的測試屬於靜態測試,對於在動態響應時所需具備的阻尼性質並無法得到, 而在此部分只能在模型驗證時做適當的調整,以得到較好的結果。 加速度輸入 模型幾何外觀建立及參數設定完之後,最重要的部份在於與自願者測試資料做比 較,以增加模型的生物真實性,本研究主要採用 JARI(Japan Automobile Research Institute)Ono 等人(1997)所做的自願者測試,實驗設置圖如圖 5。
利用滑車沿著滑軌反向滑下撞擊阻尼器,以產生減加速度,對於背對著的自願者 而言,其受到一反向減加速度,意同於受到加速度衝擊,其所受到加速度約為 4g, 速度變化量v約為 9.5 km/h。加速度圖如圖 6。 Sled Acceleration -1.00 -0.50 0.00 0.50 1.00 1.50 2.00 2.50 3.00 3.50 4.00 4.50 0 50 100 150 200 250 300 Time (msec) A c c e le ra ti o n (g )
Average Upper Lower
圖 6 JARI 滑車測試加速度 T1 X Acceleration -1 -0.5 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 0 50 100 150 200 250 300 Time (msec) A c c e le ra ti o n (g )
Average Upper Lower
T1 Z Acceleration -2 -1 0 1 2 3 4 0 50 100 150 200 250 300 Time (msec) A c c e le ra ti o n (g )
Average Upper Lower
T1 Y Angular Acceleration -40 -30 -20 -10 0 10 20 30 40 0 50 100 150 200 250 300 Time (msec) A c c e le ra ti o n (r e v /s e c ^ 2 ) Average 圖 7 自願者 T1 加速度
由於本研究所建立的模型為 T1 以上的部分,若以滑車加速度施加於 T1 難免會 有些許失真。因此以 Ono 於滑車實驗中所量測到的 T1 加速度為主要輸入,包含 X、 Z 方向加速度及 Y 方向角加速度,如圖 7。 如何去定義模型或者是新設計出的人偶是否具有生物真實性,由 Morgan 提出累 積變異量(Cumulative variance)的方法用以比較信號與信號間的差異程度(1981),此方 法可用於評估整段信號與用以參照的上下限範圍(Reference corridor)的關係程度,根 據此方式衍生出用以評估是否具有生物真實性的方法,稱為累計變異比值(CVR, Cumulative variance ratio)(Philippens et al., 2002),可視為用以評估生物真實性的分 數,根據不同的驗證項目,得到不同的生物真實性分數,再取其平均以判斷生物真實 性的程度如何。計算公式如下:
2 2 ( ) _ ( ) max(( ( ) _ ( )) ) end start end start t T t T t T t Tdummy t human average t CVR
cor t human average t
(6) ( ) dummy t :模型或新建人偶驗證項目訊號 _ ( ) human average t :自願者測試平均訊號 ( ) cor t :驗證範圍上下限 根據文獻所提供的資訊,若 CVR 小於 1,則生物真實性非常良好,若 CVR 大於 5,則生物真實性非常差,甚至無關聯性存在,計算平均 CVR 值時,若 CVR 大於 5, 則視為 5。 不同速度下運動反應建立 由於自願者測試資料並不易求得,且在現今人道精神較為重視的時代,欲取得更 多的自願者測試資料,甚至於大體測試資料,也都相當不易,因此欲探討在不同速度 下的鞭甩性傷害,以本研究所建立的頭頸模型,對於 T1 輸入的部份將會是一大困難。本研究將採用 Fard 等人(2003)所運用系統識別(System identification)的方法,將 人體頭頸部份簡化為二連桿,以滑車加速度作為輸入,施加於 T1 位置,而將頭部 CG 及 OC 位置的角速度視為輸出,求得其間的轉移函數(Transfer function),之後輸入任 意加速度經由求得的轉移函數經過計算而得輸出,與自願者測試比對的結果相去不 遠。而本研究利用相同的方法,向下延伸至 T4/T5,而將其以上部分視為三連桿,利 用系統識別的方式以及訊號頻域分析的方法求得轉移函數,若已知滑車加速度(輸 入),經由轉移函數將可得知 T1 加速度(輸出),如圖 8,在此處將忽略 T1 Z 方向加速 度的影響(吳,2005 )。
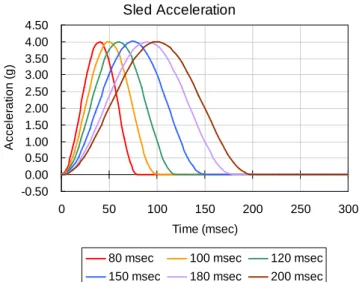
( ) H jω Y jω( ) ( ) X jω T1 X T1 圖 8 轉移函數輸入與輸出 一般用於車輛碰撞測試上常用加速度訊號圖用以代表撞擊的速度變化量,主要分 為四種波形:半正弦波(Haversine)、正弦波(Sine)、方波(Square)及三角波(Triangular), 其中以半正弦波最為常用(Varat and Husher, 2003), Ono 所利用的滑車加速度訊號亦 為此種波形,在此處滑車加速度訊號將以半正弦波作為輸入的速度變化量(加速度訊 號)。 速度變化量為加速度曲線下所圍面積,而控制速度變化量的因素主要有兩個,加 速度峰值(Peak)及波形持續時間(Duration),因此將分為以下兩個部份作為探討,一為 固定波形持續時間,改變加速度峰值,由 3g 增加至 6g,如圖 9,二為固定加速度峰 值,改變波形持續時間,由 80 msec 增加至 200 msec,如圖 10,撞擊速度皆為低速後 撞 20 km/hr 以下。 Sled Acceleration -1.00 0.00 1.00 2.00 3.00 4.00 5.00 6.00 7.00 0 50 100 150 200 250 300 Time (msec) A c c e le ra ti o n (g ) 3g 3.5g 4g 4.5g 5g 5.5g 6g 圖 9 各速度下滑車加速度(固定波形持續時間)
Sled Acceleration -0.50 0.00 0.50 1.00 1.50 2.00 2.50 3.00 3.50 4.00 4.50 0 50 100 150 200 250 300 Time (msec) A c c e le ra ti o n (g )
80 msec 100 msec 120 msec
150 msec 180 msec 200 msec
圖 10 各速度下滑車加速度(固定加速度峰值)
由以上兩種改變速度變化量的方式,經由 Ono 自願者測試所求得的轉移函數,便可 得知 T1 X 方向加速度及 Y 方向角加速度的變化。
五、結果與討論
生物真實性驗證
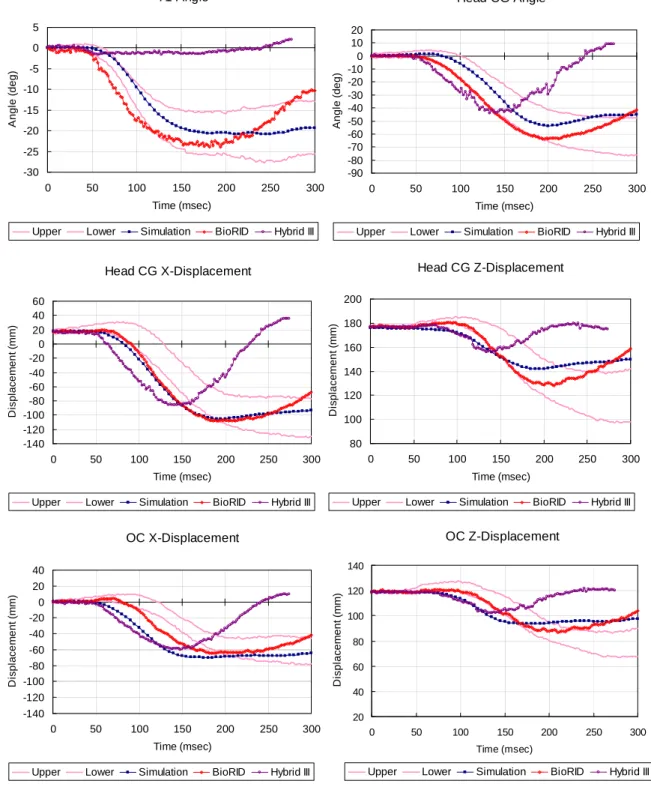
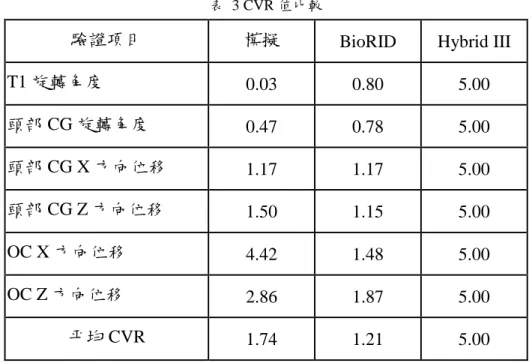
為了證明模型具有生物真實性,本模型驗證主要根據 Ono 所做的自願者測試資 料,觀察的位置如圖 4 所示,分別為頭部重心(Head CG)、T1 的旋轉角度以及頭部重 心、枕髁關節(OC)位移,其結果如圖 11,特將 BioRID 及 Hybrid III 在此滑車加速度 下所得的結果一同繪於圖中比較。 由於本研究頭頸模型將 T1 的運動作為輸入,以提高頭頸模型的真實性,因此 T1 旋轉角度的結果必定能夠進入自願者測試的驗證範圍內,而 BioRID 是以完整人偶做 實驗測試,T1 旋轉角度的表現自然較差,相較於 Hybrid III 的結果,T1 位置幾乎無 法表現旋轉的特性,而頭部旋轉角度變化,由模擬出來的結果可以看出,在前 200 msec 以前能夠精準的落入驗證範圍(Corridor)內,表現相較 BioRID 在此時間內僅能達到低 標(Lower bound)的結果為佳,而在 200 msec 之後與 BioRID 相同,有些許回彈的現象, 但其回彈趨勢較緩。 由圖 11 中可以看出模型頭部 CG 於 X 方向模擬結果,其運動最大值能落於驗證 範圍上下限的最大值內,但其一開始向後的 X 方向運動反應較自願者測試資料快, 造成 X 方向結果有時間提早的現象,而 Z 方向雖然表現不如 BioRID 佳,但由 BioRID 的反應來看,當 Z 方向達到最大值時,開始急速增加,表示向前回彈的狀況非常快速, 而模型模擬當達到最大值時能夠較為平緩,較符合驗證範圍的趨勢,也表示模型所受 的回彈力較小,而由 OC 位移結果來看,其反應表現並不是很好,BioRID 的表現亦 是如此,主要是由於 OC 位置並不容易界定,OC 為頭部與 C1 的交界,並非為一個 點,而是一個區域,彼此能夠相對滑動,因此要能夠清楚判斷 OC 位置並不容易,且 自願者測試的 OC 位置是藉由貼在皮膚表面的標記作為定位,但人體皮膚並非緊貼在 骨頭上,因此在運動時,難免因皮膚的拉伸或收縮造成標記的移動,而這也造成模擬 結果與測試資料具有較大差距的原因。 若以 CVR 值針對生物真實性做評分,驗證項目如圖 11,結果列於表 3 中,由結 果可以觀察出,模擬部分主要由於 OC X 方向位移 CVR 值過大,以致平均值較 BioRID 大,但平均值為 1.74,代表此模型於後撞情況上具有一定程度的生物真實性。而 Hybrid III 在生物真實性的評估中,每個驗證項目的 CVR 值均大於或等於 5,表示 Hybrid III 於後撞的驗證項目上,不具有生物真實性,也說明 Hybrid III 不適用於後撞的情形。
T1 Angle -30 -25 -20 -15 -10 -5 0 5 0 50 100 150 200 250 300 Time (msec) A n g le (d e g )
Upper Lower Simulation BioRID Hybrid III
Head CG Angle -90 -80 -70 -60 -50 -40 -30 -20 -10 0 10 20 0 50 100 150 200 250 300 Time (msec) A n g le (d e g )
Upper Lower Simulation BioRID Hybrid III
Head CG X-Displacement -140 -120 -100 -80 -60 -40 -20 0 20 40 60 0 50 100 150 200 250 300 Time (msec) D is p la c e m e n t (m m )
Upper Lower Simulation BioRID Hybrid III
Head CG Z-Displacement 80 100 120 140 160 180 200 0 50 100 150 200 250 300 Time (msec) D is p la c e m e n t (m m )
Upper Lower Simulation BioRID Hybrid III
OC X-Displacement -140 -120 -100 -80 -60 -40 -20 0 20 40 0 50 100 150 200 250 300 Time (msec) D is p la c e m e n t (m m )
Upper Lower Simulation BioRID Hybrid III
OC Z-Displacement 20 40 60 80 100 120 140 0 50 100 150 200 250 300 Time (msec) D is p la c e m e n t (m m )
Upper Lower Simulation BioRID Hybrid III
表 3 CVR 值比較
驗證項目 模擬 BioRID Hybrid III
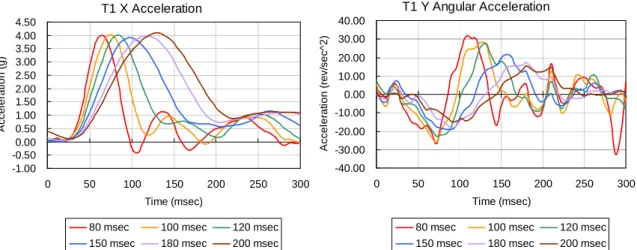
T1 旋轉角度 0.03 0.80 5.00 頭部 CG 旋轉角度 0.47 0.78 5.00 頭部 CG X 方向位移 1.17 1.17 5.00 頭部 CG Z 方向位移 1.50 1.15 5.00 OC X 方向位移 4.42 1.48 5.00 OC Z 方向位移 2.86 1.87 5.00 平均 CVR 1.74 1.21 5.00 變速度傷害分析 案例 1─固定波形持續時間 在固定波型持續時間 150 msec,加速度峰值由 3g 至 6g,滑車加速度圖如圖 9, 經由轉移函數計算之後的 T1 X 方向加速度及 Y 方向角加速度如圖 12。 T1 X Acceleration 0.00 1.00 2.00 3.00 4.00 5.00 6.00 7.00 0 50 100 150 200 250 300 Time (msec) A c c e le ra ti o n (g ) 3g 3.5g 4g 4.5g 5g 5.5g 6g T1 Y Angular Acceleration -40.00 -30.00 -20.00 -10.00 0.00 10.00 20.00 30.00 40.00 0 50 100 150 200 250 300 Time (msec) A c c e le ra ti o n (r e v /s e c ^ 2 ) 3g 3.5g 4g 4.5g 5g 5.5g 6g 圖 12 各速度下 T1 加速度(固定波形持續時間) 案例 2─固定加速度峰值 在固定加速度峰值 4g,波形持續時間由 80 msec 至 200 msec,滑車加速度圖如圖 10,經由轉移函數計算之後的 T1 X 方向加速度及 Y 方向角加速度如圖 13。
T1 X Acceleration -1.00 -0.50 0.00 0.50 1.00 1.50 2.00 2.50 3.00 3.50 4.00 4.50 0 50 100 150 200 250 300 Time (msec) A c c e le ra ti o n (g )
80 msec 100 msec 120 msec 150 msec 180 msec 200 msec
T1 Y Angular Acceleration -40.00 -30.00 -20.00 -10.00 0.00 10.00 20.00 30.00 40.00 0 50 100 150 200 250 300 Time (msec) A c c e le ra ti o n (r e v /s e c ^ 2 )
80 msec 100 msec 120 msec 150 msec 180 msec 200 msec
圖 13 各速度下 T1 X 方向加速度(固定加速度峰值) 變速度案例比較 將此兩種控制速度變化量的案例所計算出的傷害準則結果一同繪製於圖 14、 15,可以清楚發現,在固定滑車加速度峰值,其傷害增加的趨勢較固定波形持續時間 要來得平緩,無論由 Nkm、NIC、LNL 或 WIC 皆是呈現此種趨勢,Nkm、LNL 及 WIC 後段傷害爬升迅速的原因,主要由於在 200 msec 以後的受力情形有明顯的變 化,包括 T1 角度轉動過大造成頭頸部份重量產生的剪力及軀幹與頸部之間相對加速 度變化過快等因素,就以整個後撞過程,從爬升階段到回彈階段,其傷害有可能不只 產生於鞭甩過程,回彈過程所造成的傷害反倒較為明顯。 若就單純以鞭甩傷害而言,此處以 NIC 作為討論較為適合,因其本來就僅以 X 方向的加速度作為計算,而不考慮受力情形,且其觀察的範圍原本就僅限定於鞭甩過 程,而之後的拉伸狀態及回彈狀態皆不在其考慮範圍,從圖 13 中可以清楚看到兩者 不同速度變化量的變化趨勢,加速度峰值的變化影響較波形持續時間變化的影響為 大,由圖中可看出,在同樣的速度變化量下,若波形持續時間較長,則 NIC 值並不 會太大,但若波形持續時間較短而加速度峰值大,則發生傷害的機會相對較高,由此 推論,即使撞擊的速度變化量不大,但其加速度峰值很高,就有可能造成傷害的發生, 換言之,傷害程度的變化不在於速度變化量多大,比較重要的關鍵在於撞擊時的加速 度峰值為多少。以此觀點,如何降低在碰撞過程中所造成的加速度峰值便是一個重要 的考量,在一般車撞情況下,遭受撞擊的乘客是無法去控制撞擊速度為多少,因此欲 降低加速度峰值,較好的辦法便是加長撞擊的時間,盡量避免車體與車體之間為剛體 接觸,增加碰撞時的潰縮區以拉長碰撞時間,無論是否針對鞭甩性傷害,能夠加長撞 擊的時間,對於鞭甩過程或回彈所造成的傷害而言,皆能降低其發生的可能。
NIC v.s. Velocity 0 2 4 6 8 10 12 0 5 10 15 20 Velocity (km/hr) N IC
Fix Duration Fix Peak Acceleration
圖 14 NIC 與速度變化量之關係 由於 Nkm、LNL 及 WIC 可適用於整個後撞過程,因此除了以計算的最大值作為 判斷依據,尚必須注意其發生的時間,即需判斷在後撞的哪個階段所發生,如圖 15 中左半邊三個圖形,Nkm、LNL 及 WIC 在隨著加速度峰值的增加會有明顯的傷害數 值增加,但就其發生的時間而言,早已脫離後撞鞭甩過程而即將回彈,此時的傷害最 大值並不為鞭甩所造成,就以 Nkm、LNL 或 WIC 作為後撞傷害判斷的依據,不應單 純只考慮其最大值,而需針對不同的階段,觀察傷害數值的變化趨勢,因此運用傷害 準則作為傷害判斷時,時間是不可或缺的因素。 若不考慮回彈所造成數值有較大跳動的階段,則如圖 15 右半邊的部份,只考慮 鞭甩過程的部份,仍可發現傷害準則隨著速度變化量增加而增加,尤其以改變加速度 峰值的情形較為明顯,與 NIC 圖所表現的情況相同,但比較兩圖對於鞭甩傷害的數 值變化情形,可以發現 NIC 隨著不同速度變化量的情形,數值上的鑑別度較大,對 於傷害的評估有較大的幫助。因此對於鞭甩傷害的評估,以 NIC 較為適當,而對於 整個後撞過程,包括回彈可能造成的傷害,則以 Nkm、LNL 及 WIC 為佳。
Nkm(Nea) v.s. Velocity 0 0.2 0.4 0.6 0.8 1 1.2 0 5 10 15 20 Velocity (km/hr) N k m
Fix Duration Fix Peak Acceleration
Nkm(Nea) v.s. Velocity 0 0.1 0.2 0.3 0.4 0.5 0.6 0 5 10 15 20 Velocity (km/hr) N k m
Fix Duration(Whiplash only) Fix Peak Acceleration(Whiplash only)
LNL v.s. Velocity 0 2 4 6 8 10 12 14 16 0 5 10 15 20 Velocity (km/hr) L N L
Fix Duration Fix Peak Acceleration
LNL v.s. Velocity 0 1 2 3 4 5 6 7 8 0 5 10 15 20 Velocity (km/hr) L N L
Fix Duration(Whiplash only) Fix Peak Acceleration(Whiplash only)
WIC v.s. Velocity 0 10 20 30 40 50 60 0 5 10 15 20 Velocity (km/hr) W IC
Fix Duration Fix Peak Acceleration
WIC v.s. Velocity 0 5 10 15 20 25 30 35 40 0 5 10 15 20 Velocity (km/hr) W IC
Fix Duration(Whiplash only) Fix Peak Acceleration(Whiplash only)
六、結論與建議
本研究目的在建立後撞人偶電腦模型,以提供日後設計真實人偶的初步設計概 念,此處採用多體動力學理論為基礎的分析軟體,其優點在於能夠將模型以質量塊及 連桿的方式,搭配彈簧阻尼的運用,以達到運動分析的效果,由圖 11 可以了解模型 與真實自願者測試資料的差距,用以達到驗證的效果。就以頭部 CG 及 OC 位置分析 上,以累計變異比值 CVR 做生物真實性的評估,本模型所表現的結果具有一定程度 的生物真實性,其中變異較大的地方在於 OC 位置上的位移變化表現稍為較差,其主 因來自於真實自願者測試資料於此位置上較難量測,再加上頭頸與頸椎間允許彼此相 對滑動的影響,皆是模擬結果與測試資料有所差距的原因。 本研究所建立的模型並不以將人體頸部完全建立出來,包括完整的頸椎幾何及所 有肌肉及韌帶等,而是盡量以機構原件使建立的模型在運動及動態反應上達到擬人的 效果,雖然本研究模型看似過於簡化,而有關於頭頸的有限元素模型也已有相當多的 研究,但終究無法完全將人體頸部表現出來,即使頸椎外觀幾何與真人無異,但在未 來將此有限元素模型實體化不免耗時耗力,且肌肉及韌帶部分仍是以等效的方式進行 模擬,同樣以等效的方式模擬肌肉及韌帶特性,採用簡單的機構原件,將有助於日後 人偶製造上的便利。 現今常用來作為頸部傷害量化準則的方式主要以 FMVSS 所規範的 Nij 為標準, 針對乘客不同的體型有不同的標準及計算方式,然而 Nij 以軸向力及力矩作為計算, 較適用於較高的撞擊速度,而對於低速後撞而言,現今已有不少傷害準則的研究,如 本研究所採用的 NIC、Nkm、LNL-index 及 WIC,傷害準則就如同材料的破壞準則, 須定訂破壞的臨界值,目前以 NIC 及 Nkm 發展較為完善,而 LNL-index 及 WIC 仍 在發展階段,對於傷害發生的臨界值並未定義,但藉由數值隨時間的變化,仍可觀察 在後撞過程中,傷害程度的變化情形。雖然同樣為傷害準則,但由於彼此間對於發生 傷害的主因不同,因此無法做數值間的轉換,如 NIC 與 Nkm,雖然文獻中提及 NIC 達至臨界值 15 時,Nkm 大約為 0.3(Kullgren et al., 2003; Eriksson and Kullgren, 2003), 但這僅就以傷害統計機率而言,由於 NIC 及 Nkm 在傷害定義上就已不同,因此對於 發生傷害的時刻自然不同,而於圖 15 也清楚說明時間對於 Nkm、LNL 及 WIC 的重 要性,需判斷數值超過臨界值時為後撞過程的哪個階段,對於 NIC 僅能用於鞭甩階 段的傷害準則不同,因此無法直接做數值上的轉換,但藉由傷害統計的分析,也確實 能在未來幫助定義傷害臨界值時,有一定程度的幫助。 本研究也針對不同速度下,分析頭頸的傷害數值,在固定加速度峰值及固定波形 持續時間兩種改變速度變化量的方式,發現在固定波形持續時間,改變加速度峰值其 傷害程度變化較大,無論是對於 Nkm、NIC、LNL 或者是 WIC 而言,皆是如此。由 於 Nkm、LNL 及 WIC 適用於整個後撞過程,不僅包含鞭甩階段,也包含回彈階段所 造成的傷害,如圖 15 左半邊三圖,若以整個後撞過程所造成的傷害作為考量,可以發現在加速度峰值變化較大的情形下,傷害最大值並不發生於鞭甩階段,而是接近回 彈的時刻,且在數值上明顯大於鞭甩階段,而在固定加速度峰值改變波形持續時間的 狀況,速度變化量同樣加大,但卻不至產生因回彈所造成傷害數值明顯增大的現象, 這也說明於車撞過程中,若能降低加速度峰值而拉長撞擊時間,將可降低傷害的程度。
七、參考文獻
AAAM (1990) “TheAbbreviated Injury Scale–1990 Review,”American Association for Automotive Medicine, Des Plaines, USA.
Barnsley, L., Lord, S. M. and Bogduk, N. (1994) “Whiplash Injury,”Pain, Vol. 58, Issue 3,
pp. 283-307.
Barnsley, L., Lord, S. M., Wallis, B. J. and Bogduk, N. (1995) “ThePrevalenceof Chronic Cervical Zygapophyseal Joint Pain after Whiplash,”Spine, Vol. 20, pp. 20-25.
Boström, O., Svensson, M. Y., Aldman, B. Hansson, H., Håland, Y., Lövsund, P., Suneson, A., Säljö, A. and Örtengren, T. (1996) “A new neckinjury criterion candidate-based on injury findings in the cervical spinal ganglia after experimental sagittal whiplash,” SAE Paper No. 1996-13-0009, Proc. Int. IRCOBI Conf., pp. 123-136.
Breig, A. (1978) “AdverseMechanicalTension in theCentralNervousSystem,”Almqvist & Wiksell, Stockholm.
Cappon, H., Philippens, M. and Wismans, J. (2001) “A New Test Method for the
Assessment of Neck Injuries in Rear-End Collisions,”Proc. 17th ESV Conf., Paper
No. 242.
Carlsson, G., Nilsson, S., Nilsson-Ehle, A., Norin, H., Ysander, L. and Örtengren, R. (1985) “Neck Injuriesin RearEnd CarCollisions.Biomechanicalconsiderationsto improve head restraints,”Proc. Int. IRCOBI/AAAM Conf. Biomech. of Impacts, pp. 277-289.
Davidsson, J., Svensson, M. Y., Flogård, A., Håland, Y., Jakobsson, L., Linder, A., Lövsund, P. and Wiklund, K. (1998a) “BioRID I-A New Biofidelic Rear Impact Dummy,”Proc. Int. IRCOBI Conf. Biomech. of Impacts, pp. 377-390.
Davidsson, J., Deutscher, C., Hell, W., Linder, A., Lövsund, P., Svensson, M. Y. (1998b) “Human Volunteer Kinematics in Rear-End Sled Collisions,”Proc. Int. IRCOBI Conf.,
pp. 289-302.
Davidsson, J., Lövsund, P., Ono, K. and Svensson, M. Y. (1999a) “A Comparison between Volunteer, BioRID P3 and Hybrid III performance in Rear-End Sled Collisions Impacts,”Proc. Int. IRCOBI Conf. Biomech. of Impacts, pp. 165-178.
Eichberger, A., Darok, M., Steffan, H., Lienzinger, P. E., Boström, O. and Svensson, M. Y. (2000) “PressureMeasurements in the Spinal Canal of Post-Mortem Human Subjects during Rear-End Impact and Correlation of Results to the Neck Injury Criterion (NIC),”Accident Analysis and prevention, Vol. 32, pp. 251-260.
Eriksson, L. and Kullgren, A. (2003) “Influence of Seat Geometry and Seating Posture on NICmax and Nkm AIS1 Neck Injury Predictability,”Proc. Int. IRCOBI Conf., pp.
Estes, M. S. and McElhaney, J. H. (1970) “ResponseofBrain Tissue of Compressive Loading,”American Society for Mechanical Engineers, Paper No. 70-BHF-13.
Fard, M. A., Ishihara, T., Inooka, H. (2003) “Dynamics of the Head-Neck Complex in Response ti the Trunk Horizontal Vibration: Modeling and Identification,”Journal of
Biomechanical Engineering, Vol. 125, pp. 533-539.
Foreman, S. M. and Croft A. C. (1988) “Whiplash Injuries,” Baltimore: Williams and Wilkins, pp. 323.
Foret-Bruno, J. Y., Dauvilliers, F., Tarriere, C. and Mack, P. (1991) “Influence oftheSeat and Head Rest Stiffness on the Risk of Cervical Injuries in Rear Impact,”Proc. 13th ESV Conf., Paper No. 91-S8-W-19.
Foster, J. K., Kortge, J. O. and Volanin, M. J. (1977) “Hybrid III – A
Biomechanically-Based Crash TestDummy,”Proc. 21st Stapp Car Crash Conf., SAE
Paper No. 770937, pp. 975-1014.
Geigl, B.C., Steffan, H.; Dippel., C., Muser, M.H., Walz, F. and Svensson, M.Y. (1995) “Comparison ofHead-Neck Kinematics During Rear End Impact Between Standard
Hybrid III, RID Neck, Volunteers and PMTO's,” Proc. Int. IRCOBI Conf.,
pp.261-270.
Heitplatz, F., Sferco, R., Fay, P., Reim, J., Kim, A. and Prasad, P. (2003) “An Evaluation of Existing and Proposed Injury Criteria with Various Dummies to Determine Their Ability to Predict the Levels of Soft Tissue Injury Seen in Real World Accidents,”
Proc. 18th ESV Conf., Paper No. 504.
Ivancic, P. C. , Pearson, A. M., Panjabi, M. M. and Ito, S. (2004) “Injury ofthe Anterior Longitudinal Ligament during Whiplash Simulation,” Eur. Spine J., Vol. 13, pp. 61-68.
Jager, M. K. J. de, (1996) “MathematicalHead-Neck Models for Acceleration Impacts,” Ph.D thesis, University of Eindhoven, Nederlands.
Kahane, C. J. (1982) “An Evaluation ofHead Restraints - Federal Motor Vehicle Safety Standard 202,”NHTSA TechnicalReport,DOT HS-806 108.
Kihlberg, J. K. (1969) “Flexion-Torsion Neck Injury in Rear Impacts,”Proc. 13th Ann. AAAM Conf., pp. 1-17.
Kleinberger, M., Sun, E., Eppinger, R., Kuppa, S. and Saul, R. (1998) “Developmentof Improved Injury Criteria for the Assessment of Advanced Automotive Restraint Systems,”NHTSA Docket No. 98-4405-9.
Klinich, K. D., Saul, R. A., Auguste, G., Backaitis, S., and Kleinberger, M. (1996) “TechniquesforDeveloping Child Dummy Protection ReferenceValues,”NHTSA Docket No. 74-41, Notice 97, Item 069.
Criteria Using Reconstructed Real-Life Rear-End Crashes with Recorded Crash Pulse,”Proc. 18th ESV Conf., Paper No. 344.
Linder, A., Svensson, M. Y., Davidsson, J., Flogård, A., Håland, Y., Jakobsson, L., Lövsund, P. and Wiklund, K. (1998) “TheNew Neck Design fortheRear-End Impact Dummy, BioRID I,”Proc. 42nd Ann. AAAM Conf., pp. 179-192.
Linder, A., Lövsund, P. and Steffan, H. (1999) “Validation of the BioRID P3 against Volunteers and PMHS Data and Comparison to the Hybrid III in Low-Velocity Rear-End Impacts,”Proc. 43rd Ann. AAAM Conf., pp. 367-381.
Lord, S. M., Barnsley, L., Wallis, B. J. and Bogduk, N. (1996) “Chronic Cervical Zygapophysical Joint Pain after Whiplash. A Placebo-Controlled Prevalence Study,”
Spine, Vol. 21, No. 15, pp. 1737-1744.
Lövsund, P., Nygren, Å., Salen, B. and Tingvall, C. (1988) “Neck InjuriesinRear End Collisions among Front and Rear Seat Occupants,”Proc. Int. IRCOBI Conf. Biomech. of Impacts, pp. 319-325.
Macnab, I. (1964) “Acceleration Injuries of the Cervical Spine,”J Bone Joint Surg, Vol.
46A, pp. 1797–1799.
Macnab, I. (1982) “Acceleration Extension Injuries of the Cervical Spine,”In Rothman RH, Simeone FA (eds): The Spine, ed 2. Philadelphia, WB Saunders. Vol. 2, pp.648. Morgan, M. R., Marcus, J. H. and Eppinger, R. H. (1981) “Correlation ofSideImpact
Dummy/Cadaver Tests,”Proc. 25nd Stapp Car Crash Conf. SAE Paper No. 811008. Muñoz, D., Mansilla, A., López-Valdés, F. and Martín, E. (2005) “A Study ofCurrent
Neck Injury Criteria Used for Whiplash Analysis. Proposal of a New Criterion
Involving Upper and Lower Neck Load Cells,” Proc. 19th ESV Conf., Paper No.
05-0313.
Olsson, I., Bunketorp, O., Carlsson, G., Gustafsson, C., Planath, I., Norin, H. and Ysander, L. (1990) “An In-Depth Study of Neck Injuries in Rear End Collisions,”Proc. Int. IRCOBI Conf. Biomech. of Impacts, pp. 269-282.
Ono, K., Kaneoka, K., Wittek, A. and Kajzer, J. (1997) “CervicalInjury Mechanism Based on the Analysis of Human Cervical Vertebral Motion and Head-Neck-Torso Kinematics during Low Speed Rear Impacts,” Proc. 41st Stapp Car Crash Conf., SAE Paper No. 973340.
Otremski, I., Marsh, J. L., Wilde, B. R., McLardy Smith, P. D. and Newman, R. J. (1989) “SoftTissueCervicalSpinalInjuriesin MotorVehicleAccidents,”Injury, Vol. 20, pp.
349-351.
Panjabi, M. M., Cholewicki, J., Nibu, K., Grauer, J. N., Babat, L. B. and Dvorak, J. (1998) “Mechanism of Whiplash Injury,”Clinical Biomechanics, Vol. 13, pp. 239-249. Philippens, M., Cappon, H., Ratingen, M. van, Wismans, J., Svensson, M., Sirey, F., Ono,
K., Nishimoto, N. and Matsuoka, F. (2002) “Comparison of the Rear Impact Biofidelity of BioRID II and RID2,”Stapp Car Crash Journal, Vol. 46, SAE Paper No. 2002-22-0023, pp. 461-476.
Robbin, D. H. (1983) “Anthropometry ofMotorVehicleOccupants,”Vol.2 Mid-sized male. UMTRI report., U.S.A.
Schmitt, K. U., Muser, M. H. and Niederer, P. (2001) “A New Injury Criterion Candidate for Rearend Collisions Taking into Account Shear Forces and Bending Moments,”
Proc. 17th ESV Conf., Paper No. 124.
Scott, M. W., McConnell W. E., Guzman, H. M., Howard, R. P., Bomar, J. B., Smith, H. L., Benedict, J. M., Raddin, J. H. and Hatsell, C. P. (1993) “Comparison of Human
and ATD Head Kinematics During Low-Speed Rearend Impacts,”Proc. 37th Stapp
Car Crash Conf., SAE Paper No. 930094, pp. 1-8.
Spitzer, W. O., Skovron, M. L., Salmi, L. R., Cassidy, J. D., Duranceau, J., Suissa, S. and Zeiss, E. (1995) “Scientific Monograph of the Quebec Task Force on Whiplash-Associated Disorders:Redifining "Whiplash"and ItsManagement.”Spine, Supplement, Vol. 20, No. 8S, ISSN: 0362-2436.
States, J. D., Balcerak, J. C. (1972) Williams, J. S., Morris, A. T., Babcock, W., Polvino, R., Riger, P. and Dawley, R. E., “Injury Frequency and Head RestraintEffectiveness in Rear-End Impact Accidents,”Proc. 16th Stapp Car Crash Conf., SAE Paper No.
720967, pp. 228-245.
States, J. D., Korn, M. W. and Masengill, J. B. (1969) “TheEnigma of Whiplash Injuries,”
Proc. 13th Ann. AAAM Conf., Paper No. 1969-12-0004, pp. 84.
Svensson, M. Y. and Lövsund, P. (1992) “A Dummy for RearEnd Collisions
-Development and Validation of a New Dummy-Neck,” Proc. Int. IRCOBI Conf.
Biomech. of Impacts, pp. 299–310.
Svensson, M. Y., Aldman, B., Lövsund, P., Hansson, H. A., Seeman, T., Suneson, A. and Örtengren, T. (1993) “PressureEffects in the Spinal Canal during Whiplash Extension Motion –A Possible Cause of Injury to the Cervical Spinal Ganglia,” Proc. Int.
IRCOBI Conf., pp.189–200.
Thunnissen, J. G. M., Ratingen, M. R. van, Beusenberg, M. C. and Janssen, E. G. (1996)
“A Dummy Neck for Low Severity Impacts,” Proc. 15th ESV Conf., Paper No.
96-S10-O-12.
Varat, M. S. and Husher, S. E. (2003) “Crash Pulse Modeling for Vehicle Safety Research,”
Proc. 18th ESV Conf., Paper No. 501.
Viano, D. C., Hardy, W. N. and King, A. I. (2000) “ResponseoftheHead,Neck and Torso to Pendulum Impacts on the Back,”Proc. 44st Stapp Car Crash Conf., SAE Paper No.
vKoch, M., Kullgren, A., Lie, A., Nygren, Å. and Tingvall, C. (1995) “SoftTissueInjury of the Cervical Spine in Rear-End and Frontal Collisions,”Proc. Int. IRCOBI Conf.,
pp. 273-284.
Wheeldon, J. A., Pintar, F. A., Knowles, S. and Yoganandan, N. (2006) “Experimental Flexion/Extension Data Corridors for Validation of Finite Element Models of the Young, Normal Cervical Spine,”J.Biomech., Vol. 39, No. 2, pp. 375-380.
Yang, K. H., Begeman, P. C., Muser, M. H., and Niederer, P., Walz, F. (1997) “On the RoleofCervicalFacetJointsin RearEnd ImpactNeck Injury Mechanism”,SAE Paper No. 970497, pp. 127-129.
吳鈞泰 (2005)“使用碰撞人偶模型對頭頸鞭甩性傷害之研究”,國立成功大學機械工程